
CrowdSim2: An Open Synthetic Benchmark for Object Detectors
Paweł Foszner
1,∗ a
, Agnieszka Szcz˛esna
1,∗ b
, Luca Ciampi
3,† c
, Nicola Messina
3,† d
,
Adam Cygan
5,§
, Bartosz Bizo
´
n
5,§
, Michał Cogiel
4,‡ e
, Dominik Golba
4,‡ f
, El
˙
zbieta Macioszek
2,∗ g
and Michał Staniszewski
1,∗,∗∗ h
1
Department of Computer Graphics, Vision and Digital Systems, Faculty of Automatic Control,
Electronics and Computer Science, Silesian University of Technology, Akademicka 2A, 44-100 Gliwice, Poland
2
Department of Transport Systems, Traffic Engineering and Logistics, Faculty of Transport and Aviation Engineering,
Silesian University of Technology, Krasi´nskiego 8, 40-019 Katowice, Poland
3
Institute of Information Science and Technologies, National Research Council, Via G. Moruzzi 1, 56124 Pisa, Italy
4
Blees sp. z o.o. Zygmunta Starego 24a/10, 44-100 Gliwice, Poland
5
QSystems.pro sp. z o.o. Mochnackiego 34, 41-907 Bytom, Poland
∗
Keywords:
Object Detection, Vehicle Detection, Pedestrian Detection, Synthetic Data, Deep Learning, Crowd Simulation.
Abstract:
Data scarcity has become one of the main obstacles to developing supervised models based on Artificial
Intelligence in Computer Vision. Indeed, Deep Learning-based models systematically struggle when applied
in new scenarios never seen during training and may not be adequately tested in non-ordinary yet crucial real-
world situations. This paper presents and publicly releases CrowdSim2, a new synthetic collection of images
suitable for people and vehicle detection gathered from a simulator based on the Unity graphical engine. It
consists of thousands of images gathered from various synthetic scenarios resembling the real world, where
we varied some factors of interest, such as the weather conditions and the number of objects in the scenes.
The labels are automatically collected and consist of bounding boxes that precisely localize objects belonging
to the two object classes, leaving out humans from the annotation pipeline. We exploited this new benchmark
as a testing ground for some state-of-the-art detectors, showing that our simulated scenarios can be a valuable
tool for measuring their performances in a controlled environment.
1 INTRODUCTION
In recent years, Computer Vision swerved toward
Deep Learning (DL)-based models that learn from
vast amounts of annotated data during the supervised
learning phase. These models achieved astonishing
results in several tasks that nowadays are considered
basic, such as image classification, causing interest
in addressing more complex domains such as object
detection (Cafarelli et al., 2022), image segmentation
(Bolya et al., 2019), visual object counting (Ciampi
et al., 2022c) (Avvenuti et al., 2022) (Ciampi et al.,
a
https://orcid.org/0000-0001-5491-9096
b
https://orcid.org/0000-0002-4354-8258
c
https://orcid.org/0000-0002-6985-0439
d
https://orcid.org/0000-0003-3011-2487
e
https://orcid.org/0000-0002-9776-9654
f
https://orcid.org/0000-0002-4542-3547
g
https://orcid.org/0000-0002-1345-0022
h
https://orcid.org/0000-0001-9659-7451
∗∗
Corresponding author
2022a), people tracking (Staniszewski et al., 2016),
or even facial reconstruction (P˛eszor et al., 2016) and
video violence detection (Ciampi et al., 2022b). How-
ever, these more cumbersome tasks often also require
more structured datasets that come with challenges
concerning bias, privacy, and cost in terms of human
effort for the annotation procedure.
Indeed, more complex tasks correspond to more
elaborated labels, and for each data sample, the ef-
fort shifts from annotating an image to annotating the
objects present in it, even at the pixel level. Further-
more, more challenging tasks often go hand in hand
with more complex scenarios that may rarely occur in
the real world, yet correctly handling them can be cru-
cial. Finally, privacy concerns surrounding Artificial
Intelligence-based models have become increasingly
important, further complicating data collection. Con-
sequently, labeled datasets are often limited, and data
scarcity has become the main stumbling block for the
development and the in-the-wild application of Com-
puter Vision algorithms. Deep Learning-based algo-
676
Foszner, P., Szcz˛esna, A., Ciampi, L., Messina, N., Cygan, A., Bizo
´
n, B., Cogiel, M., Golba, D., Macioszek, E. and Staniszewski, M.
CrowdSim2: An Open Synthetic Benchmark for Object Detectors.
DOI: 10.5220/0011692500003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
676-683
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
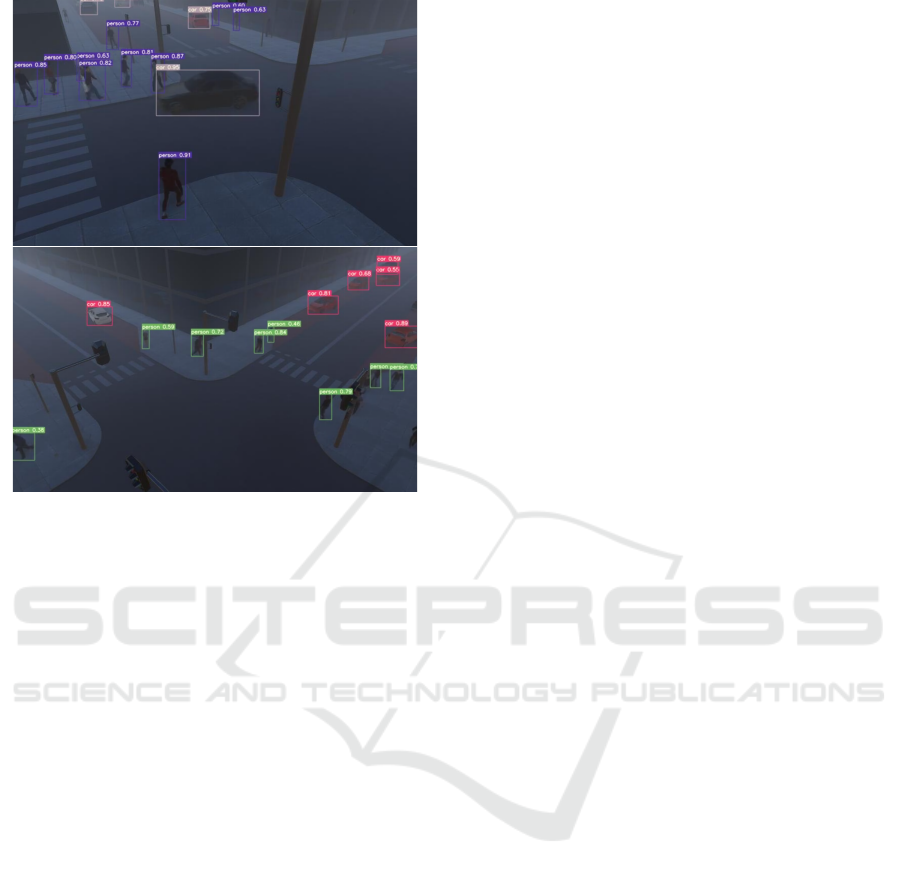
Figure 1: Some samples of our synthetic dataset we ren-
dered with our simulator, together with the bounding boxes
localizing the objects of interest.
rithms systematically struggle in new scenarios never
seen during the training phase and may not be ade-
quately tested in non-ordinary yet crucial real-world
situations.
One appealing solution that is recently arising re-
lies on collecting synthetic data gathered from vir-
tual environments resembling the real world. Here,
by interacting with the graphical engine, it is pos-
sible to automatically collect the labels associated
with the objects of interest, cutting off the human ef-
fort from the annotation procedure, thus reducing the
costs. Furthermore, these reality simulators provide
frameworks where it is possible to create specific sce-
narios by controlling and explicitly varying the fac-
tors that characterize them. Hence, they represent the
perfect environments where automatically acquiring
labeled data for the training phase but also be used as
controlled testing grounds for evaluating the perfor-
mance capabilities of the employed models.
In this paper, we consider the object detection
task, focusing our attention on people and vehicle de-
tection. We deem that people localization is crucial
for security as well as for crowd analysis; on the other
hand, vehicle detection constitutes the building block
for urban and road planning, traffic light modeling,
and traffic management, to name a few. In particu-
lar, we introduce and make publicly available Crowd-
Sim2, a new vast collection of synthetic images suit-
able for object detection and counting, collected by
exploiting a simulator based on the Unity graphical
engine. Specifically, it consists of thousands of small
video clips gathered from various synthetic scenar-
ios where we varied some factors of interest, such
as the weather conditions and the number of objects
in the scenes. The labels are automatically collected
and consist of bounding boxes that precisely localize
objects belonging to two different classes — person
and vehicle. We report in Figure 1 some samples of
images together with the bounding boxes localizing
the objects of interest in different scenarios we ren-
dered with our simulator. Then, we present a detailed
experimental analysis of the performance of several
state-of-the-art DL-based object detectors pre-trained
over general object detection databases present in the
literature by exploiting our CrowdSim2 dataset as a
testing ground. More in-depth, we extracted, from
the collected videos, batches of frames belonging to
specific and controlled scenarios, and we measured
the obtained performances by varying the factors that
characterized them.
Summarizing, the contributions of this paper are
listed below:
• we propose CrowdSim2, a new synthetic dataset
suitable for people and vehicle detection, col-
lected by exploiting a simulator based on the
Unity graphical engine and made freely avail-
able in the Zenodo Repository at (Szcz˛esna et al.,
2023);
• we test some state-of-the-art object detectors over
this new benchmark, exploiting it as a testing
ground where we varied some factors of interest
such as the weather conditions and the object den-
sity;
• we show that our simulated scenarios can be
a valuable tool for measuring detectors’ perfor-
mances in a controlled environment.
2 RELATED WORKS
2.1 Synthetic Datasets
Synthetically-generated datasets have recently gained
considerable interest due to the need for huge
amounts of annotated data. Some notable examples
are GTA5 (Richter et al., 2016) and SYNTHIA (Ros
et al., 2016) for semantic segmentation, Joint Track
Auto (JTA) (Fabbri et al., 2018) for pedestrian pose
estimation and tracking, Virtual Pedestrian Dataset
(ViPeD) (Ciampi et al., 2020) (Amato et al., 2019)
for pedestrian detection, Grand Traffic Auto (GTA)
(Ciampi et al., 2021) for vehicle segmentation and
CrowdSim2: An Open Synthetic Benchmark for Object Detectors
677

counting, CrowdVisorPPE (Benedetto et al., 2022)
for Personal Protective Equipment detection and Vir-
tual World Fallen People (VWFP) (Carrara et al.,
2022) for fallen people detection. These datasets
are mainly exploited for training deep learning mod-
els, which benefit from the fact that these collec-
tions of images are vast since the labels are auto-
matically collected. On the other hand, using syn-
thetic data as ground test collections is a relatively un-
explored field. Furthermore, the datasets mentioned
above are collected from the GTA V (Grand Theft
Auto V) video game by Rockstar North. Although
it is a very realistic generator of annotated images,
some limitations arise when new scenarios or behav-
iors are needed. By contrast, using a simulator based
on an open-source graphical engine allows one to cre-
ate more customized environments and easily mod-
ify some factors of interest — density of the objects,
weather conditions, and object interactions.
2.2 Object Detectors
In the last decade, object detection has become one
of the most critical and challenging branches of Com-
puter Vision. It deals with detecting instances of se-
mantic objects of a specific class (such as humans,
buildings, or cars) in digital images and videos (Da-
siopoulou et al., 2005). This task has attracted in-
creasing attention due to its wide range of applica-
tions and recent technological breakthroughs. Cur-
rently, most state-of-the-art object detectors employ
Deep Learning models as their backbones and detec-
tion networks to extract features from images, classifi-
cation, and localization, respectively. Existing object
detectors can be divided into two categories: anchor-
based detectors and anchor-less detectors. The mod-
els in the first category compute bounding box loca-
tions and class labels of object instances exploiting
Deep Learning-based architectures that rely on an-
chors, i.e., prior bounding boxes with various scales
and aspect ratios. They can be further divided into
two groups: i) the two-stage paradigm, where a first
module is responsible for generating a sparse set of
object proposals and a second module is in charge
of refining these predictions and classifying the ob-
jects; and ii) the one-stage approach that directly re-
gresses to bounding boxes by sampling over regu-
lar and dense locations, skipping the region proposal
stage. Some notable examples belonging to the first
group are Faster R-CNN (Ren et al., 2017) and Mask
R-CNN (He et al., 2017). At the same time, popu-
lar networks of the latter set are the YOLO family
and RetinaNet (Lin et al., 2020) algorithm. On the
other hand, anchor-free methods rely on predicting
key points, such as corner or center points, instead
of using anchor boxes and their inherent limitations.
Some popular works existing in the literature are Cen-
terNet (Zhou et al., 2019), and YOLOX (Ge et al.,
2021). Very recently, another object detector cate-
gory is emerging, relying on the newly introduced
Transformer attention modules in processing image
feature maps, removing the need for hand-designed
components like a non-maximum suppression proce-
dure or anchor generation. Some examples are DEtec-
tion TRansformer (DETR) (Carion et al., 2020) and
one of its evolution, Deformable DETR (Zhu et al.,
2021).
In this paper, we consider some networks belong-
ing to the "You Only Look Once" (YOLO) family
detectors, which turned out to be one of the most
promising detector architectures in terms of efficiency
and accuracy. The algorithm was introduced by
(Redmon et al., 2016) as a part of a custom frame-
work called Darknet (Redmon, 2013). Acronym
YOLO (You Only Look Once) derived from the idea
of single shot regression approach. The author in-
troduced the single-stage paradigm that made the
model very fast and small, even possible to im-
plement on edge devices. The next version was
YOLOv2 (Redmon and Farhadi, 2017), which intro-
duced some iterative improvements (higher resolu-
tion, BatchNorm, and anchor boxes). YOLOv3 (Red-
mon and Farhadi, 2018) added backbone network
layers to the model and some other minor improve-
ments. YOLOv4 (Bochkovskiy et al., 2020) intro-
duced improved feature aggregation and mish activa-
tion. YOLOv5 (Qu et al., 2022) proposed some im-
provements in feature detection, split into two stages
- shallow feature detection and deep feature detection.
The latest ones YOLOv6 (Li et al., 2022) and YOLOv7
(Wang et al., 2022) added some new modules like the
re-parameterized module and a dynamic label assign-
ment strategy, further increasing the accuracy.
3 THE Crowdsim2 DATASET
In this section, we introduce our CrowdSim2 dataset,
a novel synthetic collection of images for people and
vehicle detection
1
. First, we describe the Unity-based
simulator we exploited for gathering the data, and
then we depict the salient characteristics of this new
database.
1
The dataset is freely available in the Zenodo Reposi-
tory at https://doi.org/10.5281/zenodo.7262220
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
678

Figure 2: Samples of our synthetic data where we show the four different weather conditions we varied with our simulator.
3.1 The Simulator
In this work, we exploited an extended version of
the CrowdSim simulator, introduced in (Staniszewski
et al., 2020), that was designed and developed by us-
ing the Unity graphical engine. The main goal of
this simulator is to produce annotated data to be used
for training and testing Deep Learning-based models
suitable for object and action detection. For this pur-
pose, it allows users to generate realistic image se-
quences depicting scenes of urban life, where objects
of interest are localized with precise bounding boxes.
More in-depth, the simulator is designed using the
agent-based paradigm. In this approach, an agent – in
our work either a human or a vehicle – is controlled
individually, and decisions are made in the context of
the environment in which the agent was placed. For
instance, people can perform different types of move-
ment thanks to the skeletal animation (Wereszczy
´
nski
et al., 2021) and actions depending on the situation in
which they find themselves, including running, walk-
ing, jumping, waving or shaking hands, etc. The re-
lated animations vary depending on the age, height,
and posture of the agent. Also, interactions between
agents are possible in the so-called interaction zones.
Within this zone, the simulator continuously checks
several conditions, such as the number of agents in
the zone or random variables. If the conditions are
met, the agents interact (fight, dance, etc.).
The environment in which agents are placed is im-
portant as the movement and behavior of the agents
themselves. The considered simulator allows the user
to generate a situation in four locations. They are:
• traffic with intersections, pedestrian crossings,
sidewalks, etc., in a typical urban environment,
captured from three different cameras;
• a green park for pedestrians without traffic, filmed
from three cameras;
• the main square of an old town, captured with two
cameras;
• a tunnel for cars captured at both the endpoints,
perfect for issues related to re-identification.
General rules of road traffic were applied to car
movements. The starting positions of the cars are ran-
domized among pre-defined starting points, and then
the vehicles move to the point where they need to
change direction. In such a place, cars make random
decisions regarding further movements. Cars can only
move in designated zones (streets and parking bays).
3.2 Simulated Data
Using the simulator described in the previous section,
we gathered a synthetic dataset suitable for people
and vehicle detection. Specifically, for people detec-
tion, we used three different scenes, while for car de-
tection, two different scenarios. We recorded thou-
sands of small video clips of 30 seconds at a resolu-
tion of 800 × 600 pixels and a frame rate of 25 Frames
Per Second (FPS), from which we extracted hundreds
of thousands of still images. We varied several fac-
tors of interest, such as people’s clothes, vehicle mod-
els, weather conditions (sun, fog, rain, and snow), and
CrowdSim2: An Open Synthetic Benchmark for Object Detectors
679

Table 1: Summary of our generated synthetic data. Each
row corresponds to different weather conditions we set us-
ing our simulator. We report the total number of the col-
lected video clips and the number of frames we extracted
from them.
# video-clips # frames
Sun 2,899 2,174,250
Rain 1,633 1,224,750
Fog 1,653 1,239,750
Snow 1,646 1,234,500
the objects’ density in the scene. The ground truth is
generated following the golden standard of the MOT-
Det Challenge
2
, consisting of the coordinates of the
bounding boxes localizing the objects of interest —
people and vehicles in our case. The summary of the
generated data is presented in Table 1. We report in
Figure 2 the four different weather conditions we con-
sidered as one of the factors we varied during the data
recording.
4 RESULTS AND DISCUSSION
In this section, we evaluate several deep learning-
based object detectors belonging to the YOLO fam-
ily, described in Section 2, on our CrowdSim2 dataset.
Following the primary use case for this dataset ex-
plained in Section 1, we employed it as a test bench-
mark to measure the performance of the considered
methods in a simulated scenario where some factors
of interest are controlled and changed. Specifically,
we compared the obtained results considering four
different weather conditions – sun, rain, fog, snow –
and different densities of objects present in the scene
– from 1 object to hundreds of objects.
We considered two different YOLO-based mod-
els: YOLOv5 and YOLOv7. Concerning YOLOv5,
we selected two different architectures having a dif-
ferent number of trainable parameters – a light ver-
sion we called YOLO5s and a more deep architec-
ture we referred to as YOLO5x. Concerning YOLOv7,
we exploited the standard architecture (we referred
to as YOLO7) and a deeper version which we called
YOLO7x. Our decision to consider models having dif-
ferent architectures has been dictated by the fact that
we wanted to prove that their behavior in the simu-
lated data reflects the one observable over the real-
world datasets – shallow models are expected to ex-
hibit moderate performances compared to deeper ar-
chitectures. We refer the reader to Section 2 and the
related papers for further details about the architec-
tures of the employed detectors. All the models were
2
https://motchallenge.net/
fed with images of 640 × 640 pixels, and the models
were pre-trained using the COCO dataset (Lin et al.,
2014), a popular collection of images for general ob-
ject detection.
We performed two different sets of experiments
— the first related to people detection and the second
to vehicle detection. We evaluated and compared the
above-described detectors following the golden stan-
dard Average Precision (AP), i.e., the average preci-
sion value for recall values over 0 to 1. Specifically,
we considered the MS COCO AP@[0.50], i.e., the AP
computed at the single IoU threshold value of 0.50
(Lin et al., 2014). We report the results concerning
people detection varying the weather conditions and
the people density in Figure 3 and Figure 4, respec-
tively. On the other hand, results regarding vehicle
detection varying the same two factors are depicted in
Figure 5 and Figure 6, respectively.
Concerning people detection, the considered mod-
els perform slightly better when the sun weather con-
dition is set. On the other hand, concerning the rain,
snow, and fog weather conditions, the detectors obtain
lower APs. This is an expected outcome since, also in
the real world, the detectors have to face more chal-
lenges when they are required to work in that specific
conditions since the objects are more difficult to find.
This trend is even more pronounced considering the
car detection experiments, where some detectors par-
ticularly struggle in the rain and fog settings. On the
other hand, the trend of both people detection and car
detection exhibits performance degradation with the
increasing of the objects present on the scene. Again,
in this case, this behavior is expected and reflects that
detecting instances is way more challenging in over-
crowded scenarios.
Looking at Figure 3, note how in the people detec-
tion scenarios, the performance difference among the
different detectors is negligible, although the YOLO7x
seems to achieve the best mean AP and the YOLO5s
exhibits the worse results. Also, considering Fig-
ure 4a, we can observe how YOLO7, YOLO7x and
YOLO5m maintain certain robustness even in the
most challenging conditions, while YOLO5s – besides
starting with a worse detection performance even in
the sun setting – has a decreasing trend for the other
weather conditions, reaching the worst AP of around
0.19 in the fog setting. Contrarily, the performance
of the different models shows steeper differences in
the car detection scenarios. In that case, the YOLO5s
completely struggles in the fog, snow and rain sce-
narios, as shown in Figure 5 and in Figure 6a. On the
other hand, YOLO7x seems more robust to all weather
conditions, except in the fog setting, for which it ex-
hibits moderate performances. This higher sensitivity
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
680
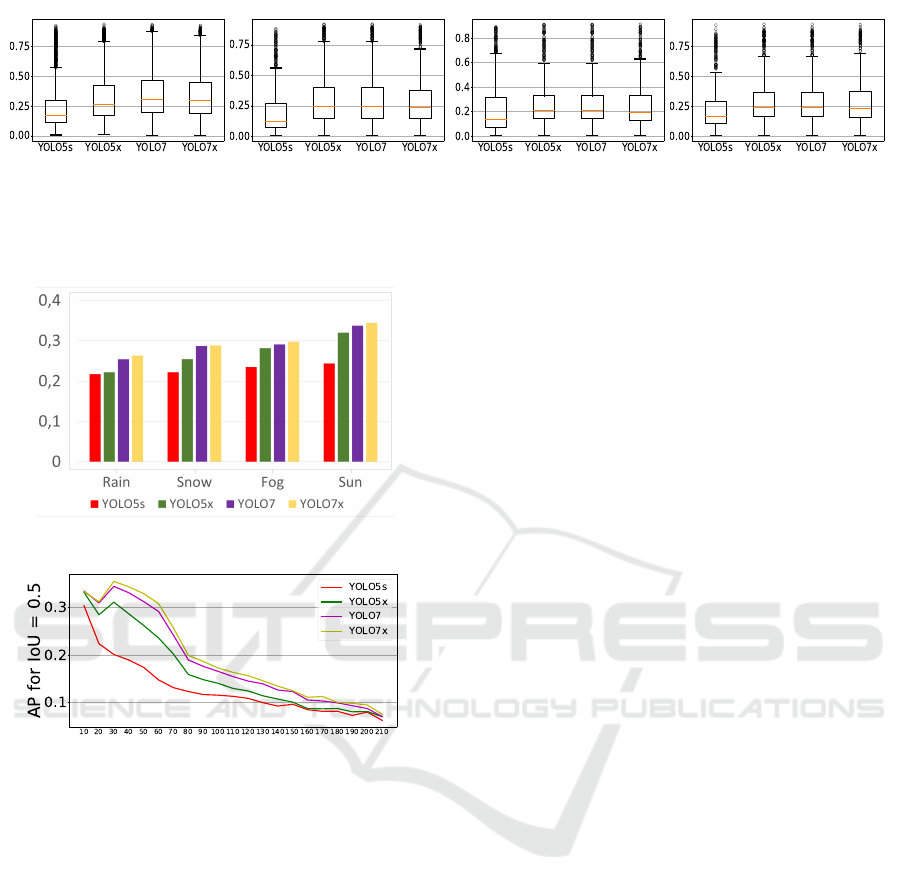
(a) sun weather condition. (b) fog weather condition. (c) rain weather condition. (d) snow weather condition.
Figure 3: Average Precision with IOU = 0.5 calculated for different weather conditions (sun, fog, rain and snow), obtained
for the people detection task by exploiting the four considered YOLO methods.
(a) Results varying weather conditions.
(b) Results varying object densities.
Figure 4: Summary of Average Precision with IOU = 0.5
obtained with the four YOLO-based considered methods by
varying the two main simulated factors of interest: weather
condition and density of the objects.
of the detectors in the vehicle detection compared to
the people scenario may be due to how the different
YOLO versions have been trained, demonstrating their
major robustness to people detection – even in very
challenging weather scenarios – than cars. This result
contributes to validating our main claim that synthetic
scenarios are crucial during the testing phase for find-
ing biases or robustness breaches of largely-used de-
tector models. Finally, by analyzing the results de-
picted in Figure 4b and in Figure 6b, we can again
confirm that the performances of the considered de-
tectors are more similar in the people detection task,
while they show significant differences in detecting
vehicles, especially in crowded scenarios.
5 CONCLUSION
In this work, we introduced a new synthetic dataset
for people and vehicle detection. This collection of
images is automatically annotated by interacting with
a realistic simulator based on the Unity graphical en-
gine. This allowed us to create a vast number of dif-
ferent simulated scenarios leaving out humans from
the annotation pipeline, in turn reducing costs and
tackling the data scarcity problem affecting super-
vised Deep Learning models. At the same time, we
kept control over some factors of interest, such as
weather conditions and object densities, and we mea-
sured the performances of some state-of-the-art ob-
ject detectors by varying that factors. Results showed
that our simulated scenarios can be a valuable tool
for measuring their performances in a controlled en-
vironment. The presented idea has an extensive num-
ber of possible applications. People and car detection
can lead to different usages, such as object counting
and traffic analysis or object tracking. Furthermore,
crowd simulation development is also desirable in the
direction of action recognition. We also plan to enrich
our simulator by introducing the possibility of view-
ing from multiple cameras in urban environments to
create a new benchmark for multi-object tracking.
ACKNOWLEDGMENTS
This work was supported by: European Union
funds awarded to Blees Sp. z o.o. under grant
POIR.01.01.01-00-0952/20-00 “Development of a
system for analysing vision data captured by pub-
lic transport vehicles interior monitoring, aimed at
detecting undesirable situations/behaviours and pas-
senger counting (including their classification by age
group) and the objects they carry”); EC H2020
project “AI4media: a Centre of Excellence deliv-
ering next generation AI Research and Training at
the service of Media, Society and Democracy” un-
der GA 951911; research project (RAU-6, 2020) and
CrowdSim2: An Open Synthetic Benchmark for Object Detectors
681
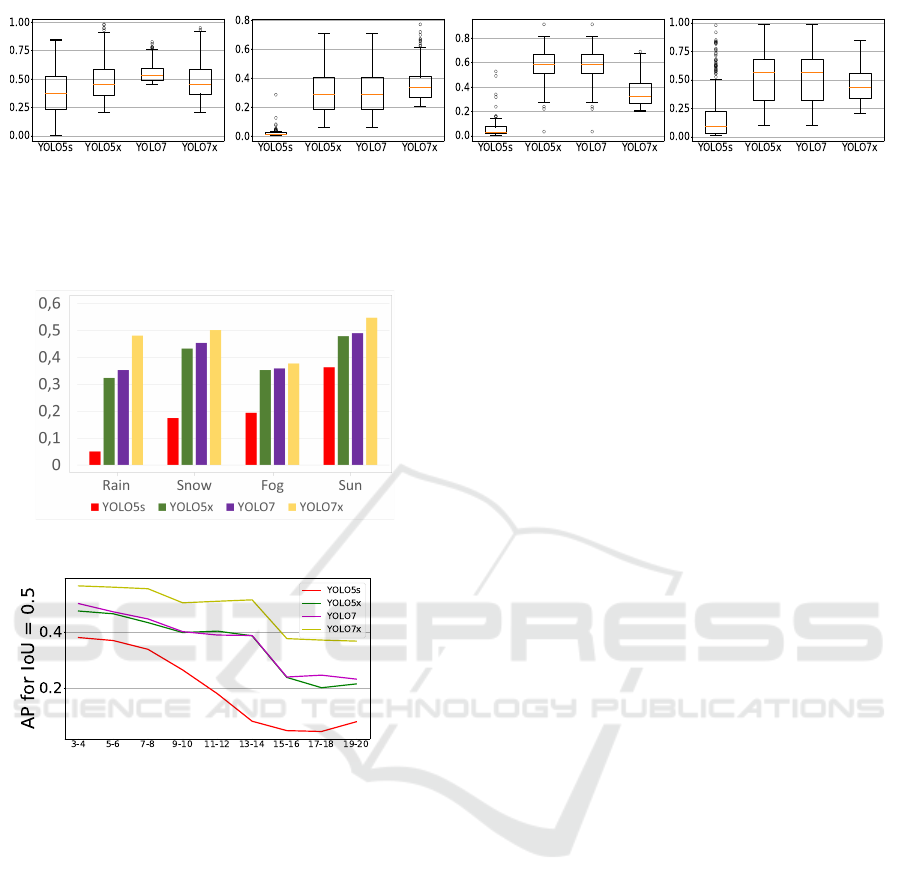
(a) sun weather condition. (b) fog weather condition. (c) rain weather condition. (d) snow weather condition.
Figure 5: Average Precision with IOU = 0.5 calculated for different weather conditions (sun, fog, rain and snow), obtained
for the vehicle detection task by exploiting the four considered YOLO methods.
(a) Results varying weather conditions.
(b) Results varying object densities
Figure 6: Summary of Average Precision with IOU = 0.5
obtained with the four YOLO-based considered methods by
varying the two main simulated factors of interest: weather
condition and density of the objects.
projects for young scientists of the Silesian University
of Technology (Gliwice, Poland); research project
INAROS (INtelligenza ARtificiale per il mOnitorag-
gio e Supporto agli anziani), Tuscany POR FSE CUP
B53D21008060008. Publication supported under the
Excellence Initiative - Research University program
implemented at the Silesian University of Technol-
ogy, year 2022. This research was supported by the
European Union from the European Social Fund in
the framework of the project "Silesian University of
Technology as a Center of Modern Education based
on research and innovation” POWR.03.05.00- 00-
Z098/17. We are thankful for students participating
in design of Crowd Simulator: P. Bartosz, S. Wróbel,
M. Wola, A. Gluch and M. Matuszczyk.
REFERENCES
Amato, G., Ciampi, L., Falchi, F., Gennaro, C., and
Messina, N. (2019). Learning pedestrian detection
from virtual worlds. In Lecture Notes in Computer
Science, pages 302–312. Springer International Pub-
lishing.
Avvenuti, M., Bongiovanni, M., Ciampi, L., Falchi, F., Gen-
naro, C., and Messina, N. (2022). A spatio- tempo-
ral attentive network for video-based crowd counting.
In IEEE Symposium on Computers and Communica-
tions, ISCC 2022, Rhodes, Greece, June 30 - July 3,
2022, pages 1–6. IEEE.
Benedetto, M. D., Carrara, F., Ciampi, L., Falchi, F.,
Gennaro, C., and Amato, G. (2022). An embed-
ded toolset for human activity monitoring in criti-
cal environments. Expert Systems with Applications,
199:117125.
Bochkovskiy, A., Wang, C., and Liao, H. M. (2020).
Yolov4: Optimal speed and accuracy of object detec-
tion. CoRR, abs/2004.10934.
Bolya, D., Zhou, C., Xiao, F., and Lee, Y. J. (2019).
YOLACT: Real-time instance segmentation. In 2019
IEEE/CVF International Conference on Computer Vi-
sion (ICCV). IEEE.
Cafarelli, D., Ciampi, L., Vadicamo, L., Gennaro, C.,
Berton, A., Paterni, M., Benvenuti, C., Passera, M.,
and Falchi, F. (2022). MOBDrone: A drone video
dataset for man OverBoard rescue. In Image Anal-
ysis and Processing – ICIAP 2022, pages 633–644.
Springer International Publishing.
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kir-
illov, A., and Zagoruyko, S. (2020). End-to-end ob-
ject detection with transformers. In Computer Vision
– ECCV 2020, pages 213–229. Springer International
Publishing.
Carrara, F., Pasco, L., Gennaro, C., and Falchi, F. (2022).
Learning to detect fallen people in virtual worlds. In
International Conference on Content-based Multime-
dia Indexing. ACM.
Ciampi, L., Carrara, F., Totaro, V., Mazziotti, R., Lupori,
L., Santiago, C., Amato, G., Pizzorusso, T., and Gen-
naro, C. (2022a). Learning to count biological struc-
tures with raters’ uncertainty. Medical Image Analy-
sis, 80:102500.
Ciampi, L., Foszner, P., Messina, N., Staniszewski, M.,
Gennaro, C., Falchi, F., Serao, G., Cogiel, M., Golba,
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
682

D., Szcz˛esna, A., and Amato, G. (2022b). Bus vio-
lence: An open benchmark for video violence detec-
tion on public transport. Sensors, 22(21).
Ciampi, L., Gennaro, C., Carrara, F., Falchi, F., Vairo, C.,
and Amato, G. (2022c). Multi-camera vehicle count-
ing using edge-AI. Expert Systems with Applications,
207:117929.
Ciampi, L., Messina, N., Falchi, F., Gennaro, C., and Am-
ato, G. (2020). Virtual to real adaptation of pedestrian
detectors. Sensors, 20(18):5250.
Ciampi, L., Santiago, C., Costeira, J., Gennaro, C., and
Amato, G. (2021). Domain adaptation for traffic den-
sity estimation. In Proceedings of the 16th Interna-
tional Joint Conference on Computer Vision, Imag-
ing and Computer Graphics Theory and Applications.
SCITEPRESS - Science and Technology Publications.
Dasiopoulou, S., Mezaris, V., Kompatsiaris, I., Papas-
tathis, V., and Strintzis, M. G. (2005). Knowledge-
assisted semantic video object detection. IEEE Trans-
actions on Circuits and Systems for Video Technology,
15(10):1210–1224.
Fabbri, M., Lanzi, F., Calderara, S., Palazzi, A., Vezzani, R.,
and Cucchiara, R. (2018). Learning to detect and track
visible and occluded body joints in a virtual world.
In Computer Vision – ECCV 2018, pages 450–466.
Springer International Publishing.
Ge, Z., Liu, S., Wang, F., Li, Z., and Sun, J. (2021).
YOLOX: exceeding YOLO series in 2021. arXiv
preprint arXiv:2107.08430.
He, K., Gkioxari, G., Dollár, P., and Girshick, R. B. (2017).
Mask R-CNN. In IEEE International Conference
on Computer Vision, ICCV 2017, pages 2980–2988.
IEEE Computer Society.
Li, C., Li, L., Jiang, H., Weng, K., Geng, Y., Li, L., Ke,
Z., Li, Q., Cheng, M., Nie, W., Li, Y., Zhang, B.,
Liang, Y., Zhou, L., Xu, X., Chu, X., Wei, X., and
Wei, X. (2022). Yolov6: A single-stage object de-
tection framework for industrial applications. CoRR,
abs/2209.02976.
Lin, T., Goyal, P., Girshick, R. B., He, K., and Dollár, P.
(2020). Focal loss for dense object detection. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 42(2):318–327.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Dollár, P., and Zitnick, C. L. (2014). Mi-
crosoft COCO: Common objects in context. In Com-
puter Vision – ECCV 2014, pages 740–755. Springer.
P˛eszor, D., Staniszewski, M., and Wojciechowska, M.
(2016). Facial reconstruction on the basis of video
surveillance system for the purpose of suspect iden-
tification. In Nguyen, N. T., Trawi
´
nski, B., Fujita,
H., and Hong, T.-P., editors, Intelligent Information
and Database Systems, pages 467–476, Berlin, Hei-
delberg. Springer Berlin Heidelberg.
Qu, Z., yuan Gao, L., ye Wang, S., nan Yin, H., and ming
Yi, T. (2022). An improved yolov5 method for large
objects detection with multi-scale feature cross-layer
fusion network.
Redmon, J. (2013). Darknet: Open source neural networks
in c.
Redmon, J., Divvala, S. K., Girshick, R. B., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In 2016 IEEE Conference on Computer Vi-
sion and Pattern Recognition, CVPR 2016, Las Vegas,
NV, USA, June 27-30, 2016, pages 779–788. IEEE
Computer Society.
Redmon, J. and Farhadi, A. (2017). Yolo9000: Better,
faster, stronger. In 2017 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
6517–6525.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Ren, S., He, K., Girshick, R., and Sun, J. (2017). Faster
r-CNN: Towards real-time object detection with re-
gion proposal networks. IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 39(6):1137–
1149.
Richter, S. R., Vineet, V., Roth, S., and Koltun, V. (2016).
Playing for data: Ground truth from computer games.
In Computer Vision – ECCV 2016, pages 102–118.
Springer International Publishing.
Ros, G., Sellart, L., Materzynska, J., Vazquez, D., and
Lopez, A. M. (2016). The SYNTHIA dataset: A
large collection of synthetic images for semantic seg-
mentation of urban scenes. In 2016 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
IEEE.
Staniszewski, M., Foszner, P., Kostorz, K., Michalczuk,
A., Wereszczy
´
nski, K., Cogiel, M., Golba, D., Woj-
ciechowski, K., and Pola
´
nski, A. (2020). Application
of crowd simulations in the evaluation of tracking al-
gorithms. Sensors, 20(17):4960.
Staniszewski, M., Kloszczyk, M., Segen, J., Wereszczy
´
nski,
K., Drabik, A., and Kulbacki, M. (2016). Recent de-
velopments in tracking objects in a video sequence. In
Intelligent Information and Database Systems, pages
427–436. Springer Berlin Heidelberg.
Szcz˛esna, A., Foszner, P., Cygan, A., Bizo
´
n, B., Cogiel,
M., Golba, D., Ciampi, L., Messina, N., Macioszek,
E., and Staniszewski, M. (2023). Crowd simulation
(CrowdSim2) for tracking and object detection.
Wang, C., Bochkovskiy, A., and Liao, H. M. (2022).
Yolov7: Trainable bag-of-freebies sets new state-
of-the-art for real-time object detectors. CoRR,
abs/2207.02696.
Wereszczy
´
nski, K., Michalczuk, A., Foszner, P., Golba, D.,
Cogiel, M., and Staniszewski, M. (2021). ELSA:
Euler-lagrange skeletal animations - novel and fast
motion model applicable to VR/AR devices. In Com-
putational Science – ICCS 2021, pages 120–133.
Springer International Publishing.
Zhou, X., Wang, D., and Krähenbühl, P. (2019). Objects as
points. arXiv preprint arXiv:1904.07850.
Zhu, X., Su, W., Lu, L., Li, B., Wang, X., and Dai, J. (2021).
Deformable DETR: deformable transformers for end-
to-end object detection. In 9th International Confer-
ence on Learning Representations, ICLR 2021. Open-
Review.net.
CrowdSim2: An Open Synthetic Benchmark for Object Detectors
683
