
Near-infrared Lipreading System for Driver-Car Interaction
Samar Daou
1
, Ahmed Rekik
1,2
, Achraf Ben-Hamadou
1,2
and Abdelaziz Kallel
1,2
1
Laboratory of Signals, systeMs, aRtificial Intelligence and neTworkS, Technopark of Sfax, Sakiet Ezzit, 3021 Sfax, Tunisia
2
Digital Research Centre of Sfax, Technopark of Sfax, Sakiet Ezzit, 3021 Sfax, Tunisia
Keywords:
Lipreading, Audiovisual Dataset, Human-Machine Interaction, Graph Neural Networks.
Abstract:
In this paper, we propose a new lipreading approach for driver-car interaction in a cockpit monitoring envi-
ronment. Furthermore, we introduce and release the first lipreading dataset dedicated to intuitive driver-car
interaction using near-infrared driver monitoring cameras. In this paper, we propose a two-stream deep learn-
ing architecture that combines both geometric and global visual features extracted from the mouth region
to improve the performance of lipreading based only on visual cues. Geometric features are extracted by a
graph convolutional network applied to a series of 2D facial landmarks, while a 2D-3D convolutional network
is used to extract the global visual features from the near-infrared frame sequence. These features are then
decoded based on a multi-scale temporal convolutional network to generate the output word sequence clas-
sification. Our proposed model achieved high accuracy for both training scenarios overlapped speaker and
unseen speaker with 98.5% and 92.2% respectively.
1 INTRODUCTION
Lipreading, or visual speech recognition, is a method
of identifying speech in a video by observing the
movements of the lips and the surrounding region us-
ing only visual information. It is an impressive skill
that can be used in a variety of situations, such as
helping people with listening disabilities, in crimi-
nal conversations, and enhancing the performance of
speech recognition systems.
Learning to read lips is challenging due basically
to homophones between distinct characters (such as
’p’ and ’b’ in English) that produce very similar and
confusing lip movement sequences at words level.
Furthermore, lipreading suffers from other known
challenges associated with subject dependencies like
facial appearance variations and various speaking ac-
cents, speed, and manner.
Thanks to the significant advances in deep learn-
ing techniques, the field of lipreading has gained a
lot of attention these last years yielding many ap-
plications (Sheng et al., 2022). Human-machine in-
teraction is one of the prominent applications since
lipreading can be used to dictate messages or instruc-
tions, especially in noisy environments or with multi-
ple speakers. However, only a few lipreading systems
for mobile device interaction have been developed
(Rekik et al., 2016; Rekik et al., 2015b; Rekik et al.,
2015a; Sun et al., 2018). In this research study, we
are interested in designing a novel car-driver interac-
tion system based on lipreading. This solution can be
associated with voice recognition systems (Afouras
et al., 2018; Ben-Hamadou, 2020) to improve their
performance, especially in a noisy car environment.
The majority of existing lipreading datasets are use-
less in this context since they were recorded with
RGB cameras, while in car cockpits, infrared cameras
are typically mounted to serve in all lighting condi-
tions, both day and night.
In this paper, we present a novel lipreading-based
Human-Machine interaction system for the vehicle
cockpit context. In addition, we release the first pub-
licly available lip-reading dataset dedicated to driver-
car interaction, obtained with a real driver monitoring
camera.
The remaining of this paper is organized as fol-
lows. Section 2 discusses related work. Our based-
lipreading Human-Machine interaction system is de-
tailed in Section 3. Then, we present our lipreading
dataset in section 4. In Section 5, we present the con-
ducted experiments and obtained results. Section 6
summarizes our findings and outlines directions for
future research.
Daou, S., Rekik, A., Ben-Hamadou, A. and Kallel, A.
Near-infrared Lipreading System for Driver-Car Interaction.
DOI: 10.5220/0011692300003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
631-638
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
631

2 RELATED WORK
Automatic visual speech recognition systems are clas-
sified into two types: word-level classification sys-
tems and character-level classification systems. In
the context of human-machine interaction, we are in-
terested only in word-level prediction, since the in-
structions provided by a car driver are limited to short
and specific sentences and individual words dictio-
nary. In this section, we present current advances in
automatic lipreading systems based on deep learning
for word-level prediction, starting with an overview
of the available short-vocabulary lipreading datasets.
2.1 Short-Vocabulary Lipreading
Datasets
The goal of automatic speech recognition systems is
to understand natural speech, mainly structured in
terms of sentences, which has made it necessary to
acquire databases containing phonetically balanced
words, phrases and sentences (Fernandez-Lopez and
Sukno, 2018).
Among the formerly available datasets, we find
VIDTIMIT (Sanderson, 2002), which was originally
designed for people identification. It consists of 43
subjects uttering 10 sentences chosen among 346 dif-
ferent sentences. Similarly, AV-TIMIT (Hazen et al.,
2004) was published in 2004 for audiovisual voice
recognition. It contains 233 speakers and 510 dif-
ferent sentences. The audio-visual datasets that are
accessible in English are summarized in Table 1. All
of these datasets provide only RGB image sequences.
There is currently no existing dataset that has been
generated to address light restrictions.
2.2 Overview on Lipreading Methods
Due to the availability of extensive datasets and the
advancement of deep learning techniques, there has
been a considerable increase in the number of papers
addressing the lipreading task during the last decade.
Gutierrez et al. (Gutierrez and Robert, 2017) pre-
sented a variety of models for predicting words us-
ing MIRACL-VC1 dataset (Rekik et al., 2014). They
pre-processed the data by detecting and cropping the
subject’s face region in each video frame, and then
concatenated the sequence of frames as input to their
model. They investigated deep layered CNN base-
line models additionally to LSTM network, inspired
by Deep Mind’s LipNet (Assael et al., 2016). The
obtained results demonstrated the effects of dropout,
hyperparameter setting, data augmentation, seen ver-
sus unseen validation partitions, batch normalization
on adjusting these models.
Later, Stafylakis et al. (Stafylakis and Tz-
imiropoulos, 2017) developed a deep neural network
for word-level visual speech recognition. It consists
of a 3D convolutional neural network followed by
a residual network that extracts more relevant visual
representations as input at every time step to a two-
layer Bidirectional Long Short-Term Memory. The
word labels were repeated at every time step so that
the overall loss is defined as the sum of losses across
all time steps. Some variations of the network were
investigated and trained in an end-to-end scheme on
the LRW dataset (Chung and Zisserman, 2017). The
best configuration improved the word prediction per-
formance, achieving 83.0% of accuracy on the LRW
dataset over previous works presented in (Chung and
Zisserman, 2017; Chung et al., 2017).
Another prominent work is the multi-tower struc-
ture proposed by Chung and Zisserman in (Chung and
Zisserman, 2018), where each tower takes a single
frame or a T-channel image as input with each channel
corresponding to a single frame in gray-scale. Then,
the activation outputs from all the towers are concate-
nated to produce the final representation of the entire
sequence. This multi-tower structure has been proved
to be effective with appealing results on the current
challenging dataset LRW.
For recognizing isolated words, (Ma et al., 2021)
proposed a lipreading model that consists of 3D con-
volutional network similar to (Stafylakis and Tz-
imiropoulos, 2017) is followed by 18 layers of resid-
ual network and a temporal convolutional network
(TCN). It achieved high performance on LRW and
LRW-100 datasets, which are the largest publicly
available datasets for isolated English word recogni-
tion task that outperforms all previous similar works.
More recently the same authors (Martinez et al.,
2020) introduced a novel depth temporal convolu-
tional layer TCN head that reduces the computa-
tional cost. This proposed architecture outperforms
the state-of-the-art performance with an accuracy of
88.6% and 46.6% on LRW and LRW-1000 datasets,
respectively.
To achieve state-of-the-art performance, the vast
majority of modern deep learning approaches re-
quire massive amounts of data, and their success
in smaller datasets has been limited. As a result,
some researchers claim that deep learning methods
struggle with simple tasks and small-scale datasets
(Petridis et al., 2020). We notice that most of the
deep learning-based methods attempt to extract rel-
evant visual features directly from input RGB frame
sequences, rather than leveraging geometric features
that can typically be extracted from mouth region and
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
632
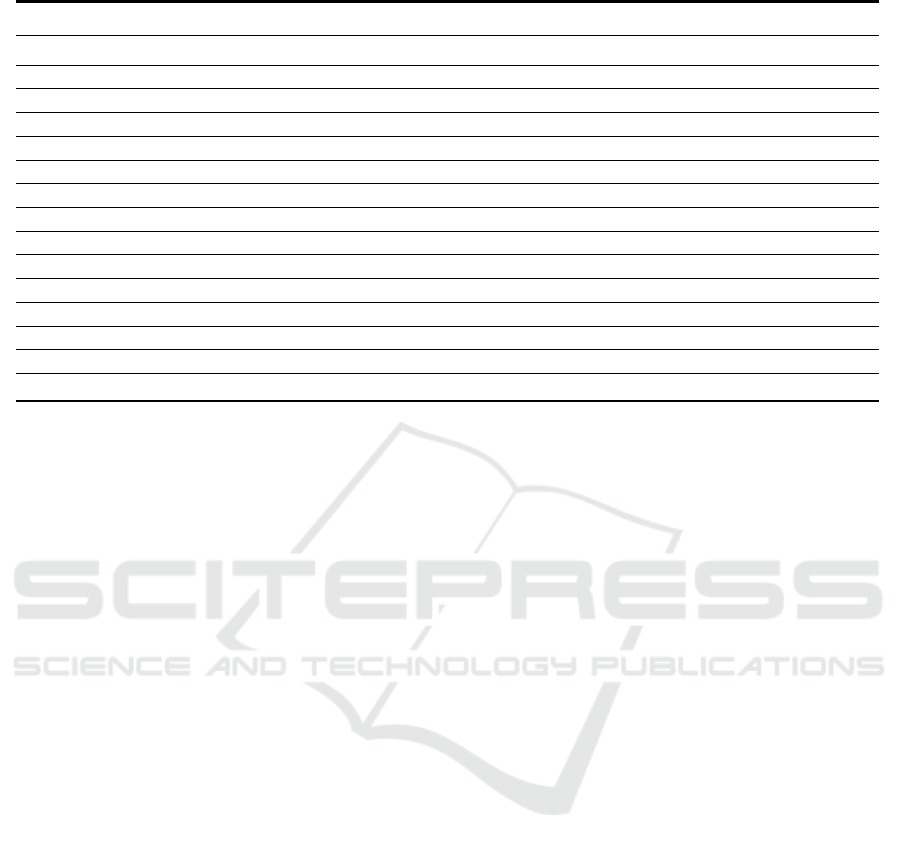
Table 1: Short-vocabulary Lipreading Databases.
Name Year Cites Language Speakers classes Utterances
IBMViaVoice (Neti et al., 2000) 2000 312 English 290 10,500 24,325
VIDTIMIT (Sanderson, 2002) 2002 51 English 43 346 430
AV-TIMIT (Hazen et al., 2004) 2004 120 English 233 510 4,660
AVICAR (Lee et al., 2004) 2004 164 English 86 1317 59,000
OuluVS (Zhao et al., 2009) 2009 196 English 20 10 1,000
LILiR (Lan et al., 2010) 2010 60 English 12 200 2,400
UNMC-VIER (Wong et al., 2011) 2011 8 English 123 12 2,460
MOBIO (McCool et al., 2012) 2012 157 English 150 - -
Austalk (Estival et al., 2014) 2014 8 English 1000 59 59,000
MIRACL-VC1 (Rekik et al., 2014) 2014 59 English 15 10 1,500
RM-3000 (Howell and Baker, 2015) 2015 4 English 1 1,000 3,000
OuluVS2 (Anina et al., 2015) 2015 32 English 53 530 530
TCD-TIMIT (Harte and Gillen, 2015) 2015 46 English 62 5,954 6,913
IBM AV-ASR (Mroueh et al., 2015) 2015 72 English 262 10,400 -
AV Digits (Petridis et al., 2018) 2018 2 English 39 10 5,850
deformations. In this paper, we propose to design a
two-stream deep learning architecture that combines
both geometric and global visual features extracted
from the mouth region to improve the performance
of lipreading based only on visual cues.
3 METHODS AND MATERIALS
3.1 Proposed Approach
As shown in figure 1, the proposed system has three
main stages. The first stage is dedicated to prepro-
cessing the input video and extracting relevant facial
information like mouth region and landmarks. In the
second stage, we used a two-stream feature encoder
module consisting in a global feature network that
aims to model the global motion information of the
mouth area to get comprehensive information related
to the visual speech, and a 2D lips landmarks module
to encode lip contour information and local motion
information around the lip. Finally, the computed fea-
tures from the output of the encoder are concatenated
and sent into a temporal model to capture the temporal
dependencies followed by a softmax layer to compute
the class probabilities for different commands in our
system.
3.1.1 Video Preprocessing
The goal of this step is to reduce the effect of the
face pose variation in different video frames. First,
68 facial landmarks are detected in all frames in the
input video using a facial landmark detection algo-
rithm (Sagonas et al., 2013). Then, each face frame
is aligned to a reference mean face shape. Finally, the
mouth area is cropped from the aligned face frames
so that the mouth region is always roughly centered
on the image crop. In this stage, facial landmarks are
only used to determine the mouth location, to align
faces and to crop the mouth region.
3.1.2 Visual Front-End Network
Global-Feature Network. The aim of the global
feature network is to encode global characteristics
of lip movements on the cropped mouth region. In-
spired from (Ma et al., 2022), this network consists
on a 3D convolutional layer, which takes as an in-
put W × H × T consecutive frames followed by a 2D
ResNet-18 (Stafylakis and Tzimiropoulos, 2017).
Landmark-Feature Network. The detected facial
landmark in the preprocessing step aims to determine
the locations of significant facial points describing
the unique location of a facial component (eye cor-
ner, mouth corner) or an interpolated point connecting
those points (Wu and Ji, 2019). In our system, only
33 facial landmark points from the mouth area are se-
lected as lipreading-related landmarks. These facial
landmarks are then encoded using one layer graph
convolutional network (GCN) (Kipf and Welling,
2016). Each frame is represented as a graph node and
every node is related to the two nearest nodes. In other
words, every frame is related to the previous frame
and to the next frame of the video sequence. The in-
put feature dimension at the node level is 33×2, cor-
responding to the lip landmark coordinates for each
Near-infrared Lipreading System for Driver-Car Interaction
633
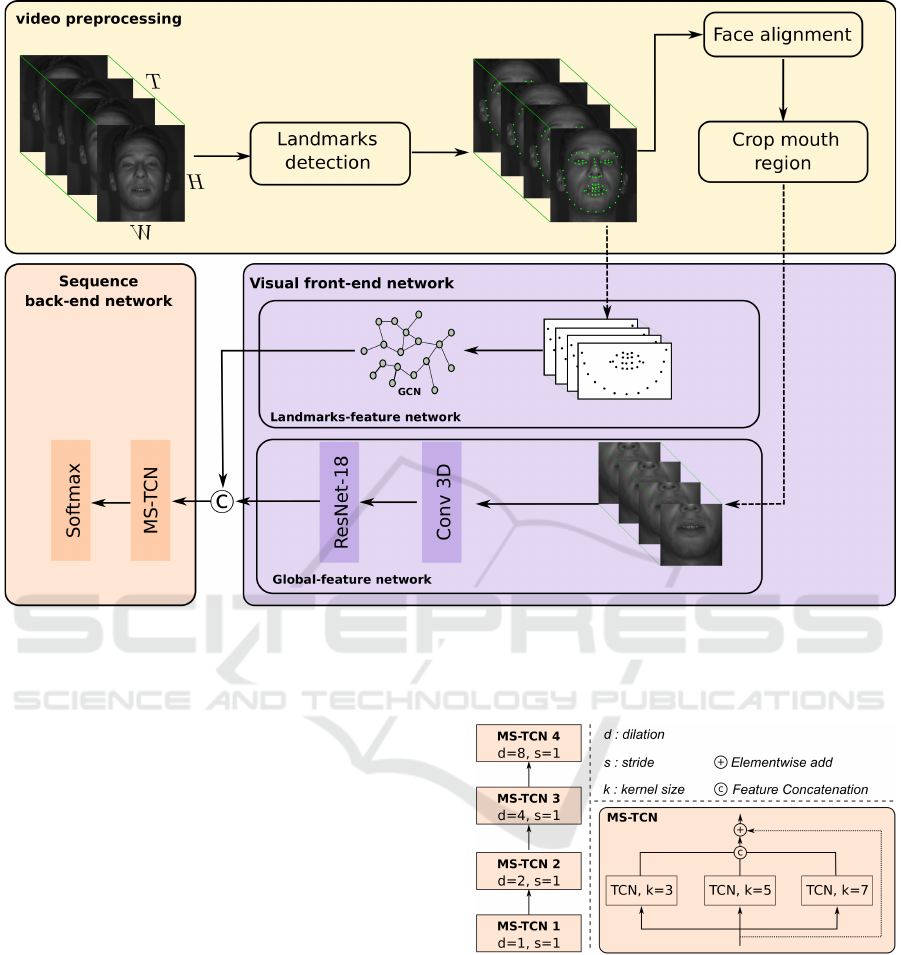
Figure 1: Three stages framework of the proposed system. Video preprocessing: extract facial landmarks and crop the
mouth region from the input infrared video. Visual front-end network: encode global visual and lips contour variation on
the cropped mouth area. Sequence back-end network: based on a multi-scale temporal convolutional network (MS-TCN) to
encode temporal variation along the extracted features and classify the input video.
frame, resulting in a 512 dimensional output feature
vector.
3.1.3 Sequence Back-End Network
The goal of this network is to map the landmark-
features and the global-features extracted from the
visual front-end network. Our back-end network is
based on the temporal convolution network (TCN)
since it improves considerably the performances on
word-level lipreading tasks (Ma et al., 2020). The
proposed model consists of Multi-Scale dilated TCN
layers, a fully connected layer, and a final softmax
layer. In this variant, each TCN layer consists of sev-
eral branches with different kernel sizes. Figure 2
presents a detailed representation of this network ar-
chitecture.
3.2 Lipreading Infrared Dataset
This section describes our multi-step pipeline for col-
lecting and processing our dataset of near-infrared
lipreading in driving mode. We call this dataset
infrared-LR. 29 speakers were involved to obtain a
Figure 2: Sequence back-end network: it contains four lay-
ers of Multi-scale dilated TCN, where the dilation size of
each layer is 1, 2, 4, and 8, respectively. Each layer consists
of three TCN blocks with kernel sizes 3, 5, and 7, respec-
tively.
global number of 1044 utterances. Each speaker re-
peated 12 representative car commands three times,
which are previously selected in collaboration with
a car maker partner (see the command list in Table
2). Near-infrared cameras are usually used in the car
cockpit since they can efficiently capture the car inte-
rior in both day and night conditions. In night condi-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
634
tions, the device registers with remote infrared LEDs
or variable range that activate when outside lighting is
inadequate. The voice is also recorded alongside the
videos for further investigations.
Table 2: Database dictionary.
Time to arrival
Weather forecast
Cooler
Warmer
Take me home
Take me to work
Take a selfie
I feel fine
I need a break
Mute
Accept call
Reject call
The voice recordings are also used to establish
a temporal alignment of the spoken audio with text
transcription, and then to construct a spatial-temporal
alignment for the frames matching to the word se-
quence. Figure 3 summarizes the pipeline, and the
various processes are detailed in the following para-
graphs.
Facial landmark
detection
Face
localization
Video
Audio visual
synchronization
Audio
Database
annotation
Audio-text
alignment
Text
Sequence
of images
Figure 3: Database generation pipeline.
Subjects. The automotive vehicle instructions were
uttered by 29 speakers, 19 male and 10 female, rang-
ing in age from 18 to 40 years. Figure 4 presents a
sample of speakers from the infrared-LR dataset.
Database Annotation. We tested standard voice
recognition APIs to annotate the sequences, however,
it was not that efficient. Although, the recognition
rates were acceptable, the generated starting and end-
ing timestamps were mostly imprecise and system-
Figure 4: Samples from infrared-LR dataset.
atically required manual correction. This leads to
switching immediately to manual annotation. The
text-to-audio alignment is done semi-automatically
using a mini-script that includes PyQt5 features (as
shown in Figure 5).
Figure 5: The developed GUI to check the automated an-
notation. If the automated annotation fails for some reason,
the GUI allows for modifying both text labels and speech
intervals.
Face Localization. The HOG-Based DLIB face de-
tector is used to identify facial appearances in each
video frame. Using a KLT detector, all face detec-
tions are then sorted into face tracks.
Facial Landmarks Detection. To identify the
mouth location, facial landmarks are required. They
are derived from the iBug face landmark predictor
(Sagonas et al., 2013), which has 68 landmarks. Us-
ing these landmarks, we perform an affine transforma-
tion to obtain a mouth-centered crop of 88×88 pixels
per frame.
4 EXPERIMENTS
4.1 Experimental Settings
Our implementation is based on the pyTorch library
(Paszke et al., 2019). The proposed architecture is
Near-infrared Lipreading System for Driver-Car Interaction
635
tim e to arrival
cooler
warm er
m ute
weathe r forecast
i feel fin e
i ne ed a b reak
take me hom e
take me to work
take a selfie
accept call
reject call
Pred ict ed label
tim e to arrival
cooler
warm er
m ute
weathe r forecast
i feel fin e
i ne ed a b reak
take me hom e
take me to work
take a selfie
accept call
reject call
True label
29 0 0 0 0 0 0 0 0 0 0 0
0
28 0 1 0 0 0 0 0 0 0 0
0 2
27 0 0 0 0 0 0 0 0 0
0 0 0
27 0 0 0 0 0 1 0 0
0 0 0 0
29 0 0 0 0 0 0 0
0 0 0 0 0
29 0 0 0 0 0 0
0 0 0 0 0 0
29 0 0 0 0 0
0 0 0 0 0 0 0
29 0 0 0 0
0 0 0 0 0 0 0 1
25 0 1 0
0 0 0 0 0 0 0 0 0
29 0 0
0 0 0 1 0 0 1 0 0 0
26 0
0 0 0 0 0 0 0 0 0 0 0
29
0
5
10
15
20
25
(a) SD without landmark features.
tim e to arrival
cooler
warm er
m ute
weathe r forecast
i feel fin e
i ne ed a b reak
take me hom e
take me to work
take a selfie
accept call
reject call
Pred ict ed label
tim e to arrival
cooler
warm er
m ute
weathe r forecast
i feel fin e
i ne ed a b reak
take me hom e
take me to work
take a selfie
accept call
reject call
True label
25 0 0 0 0 0 0 0 0 0 0 1
0
21 0 4 0 0 0 0 0 0 0 0
0 3
22 0 0 0 0 0 0 0 0 0
0 3 0
21 0 0 0 0 0 0 0 0
0 0 0 2
22 0 0 0 0 0 0 0
0 0 0 0 0
27 0 0 0 0 0 0
0 0 0 0 1 1
23 0 0 0 0 0
0 0 0 1 0 0 0
23 0 1 0 0
0 0 1 0 0 2 0 0
21 0 1 0
0 0 2 1 0 0 0 0 0
21 0 0
0 0 0 0 0 0 0 0 0 0
24 0
0 2 1 0 1 0 0 0 1 0 0
19
0
5
10
15
20
25
(b) SI without landmark features.
tim e to arrival
cooler
warm er
m ute
weathe r forecast
i feel fin e
i ne ed a b reak
take me hom e
take me to work
take a selfie
accept call
reject call
Pred ict ed label
tim e to arrival
cooler
warm er
m ute
weathe r forecast
i feel fin e
i ne ed a b reak
take me hom e
take me to work
take a selfie
accept call
reject call
True label
0
5
10
15
20
25
(c) SD with landmark features.
tim e to arrival
cooler
warm er
m ute
weathe r forecast
i feel fin e
i ne ed a b reak
take me hom e
take me to work
take a selfie
accept call
reject call
Pred ict ed label
tim e to arrival
cooler
warm er
m ute
weathe r forecast
i feel fin e
i ne ed a b reak
take me hom e
take me to work
take a selfie
accept call
reject call
True label
0
5
10
15
20
25
(d) SI with landmark features.
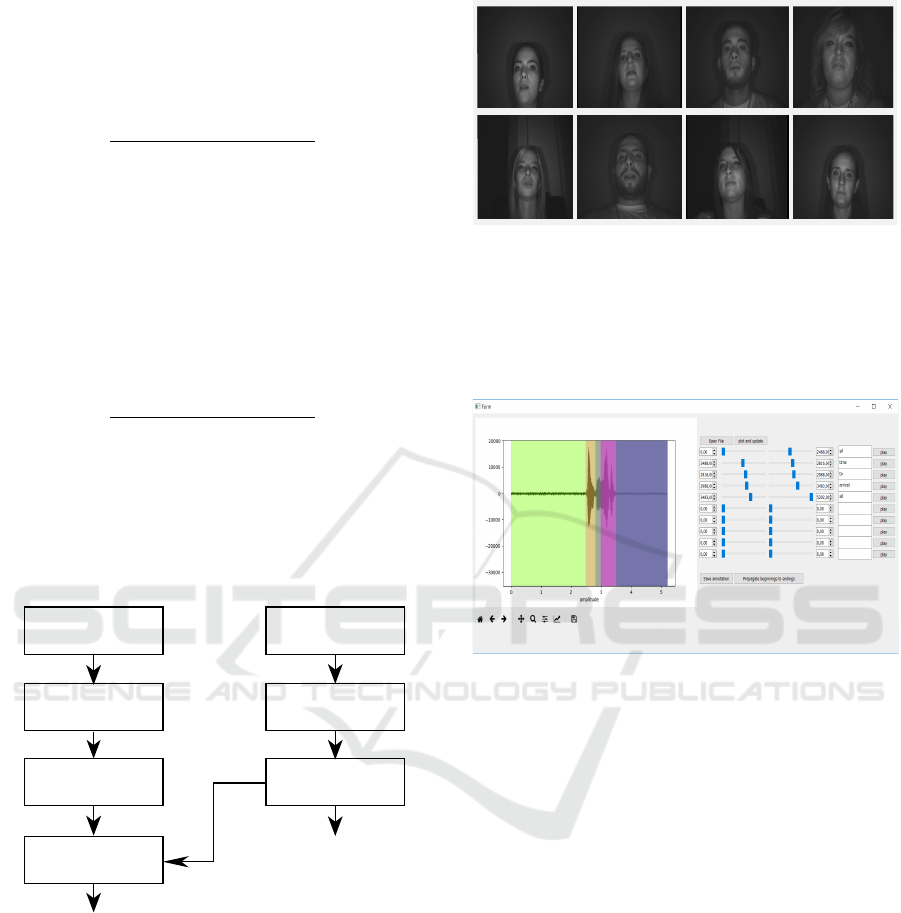
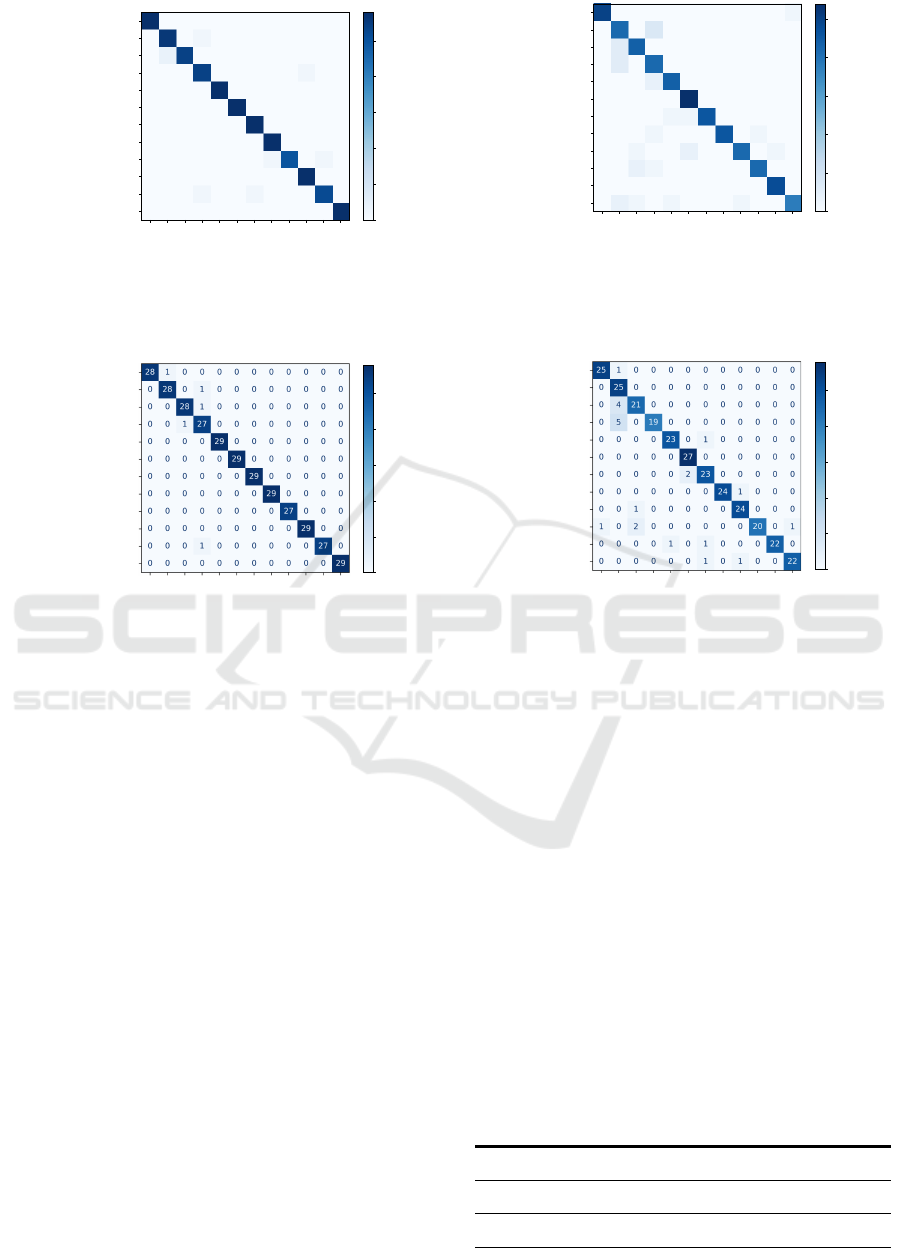
Figure 6: Obtained confusion matrices for different configurations. a, b: speaker-dependent and speaker-independent config-
uration, respectively, using only the global-feature network. c, d: speaker-dependent and independent configuration, respec-
tively, using both landmark-feature and global-feature networks.
trained for 200 epochs on an NVIDIA Titan V GPU
with 12GB memory, with a mini-batch size of 8. The
AdamW optimizer (Loshchilov and Hutter, 2017) is
used, with an initial learning rate of 3e-4. The learn-
ing rate is decayed without a warm-up phase using
a cosine annealing strategy. For all experiments, we
also employ variable-length augmentation (Martinez
et al., 2020).
4.2 Experimental Results
As a first attempt toward developing a lip-reading
system that it suitable to driver-car interaction, we
start by running a series of experiments to assess the
proposed system’s performance on our infrared-LR
dataset.
The proposed system is evaluated on two con-
figurations: subject-dependent (SD) and subject-
independent (SI). For SD Configuration, all speakers’
videos are used for both the training and the valida-
tion stages. However, for the SI configuration, the
separation of training and validation data is done at
the speaker level where speakers present in the train-
ing data are not present in the validation subset.
To demonstrate the importance of combining
landmark features and global visual features, we eval-
uate our system using global features only and using
global features combined with landmarks features for
both SD and SI configurations. Table 3 presents the
obtained results for the different configurations. The
values presented in this table correspond to the rate
of the lip-reading system’s accuracy, which indicates
the proportion of instructions accurately predicted rel-
ative to all commands delivered in the test set of data.
Table 3: Obtained lipreading performance for the different
setting combinations.
Configuration Landmarks (-) Landmarks (+)
SD 97.6% 98.5%
SI 90.2% 92.2%
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
636

Experiments for the SD Configuration. The train-
ing/testing split is as follows. As each command is
uttered 3 times for each user, we choose to randomly
select 2 sequences for training and use the remaining
one for validation. As a result, 29 × 12 sequences are
used for the validation. The overall obtained recog-
nition rate is equal to 97.6% without considering the
landmark features as additional data, while the full
model achieved a high performance of 98.5%.
Experiment for the SI Configuration. A perfor-
mance drop is usually expected when comparing the
SI configuration to the SD configuration. Indeed, the
overall performance obtained for the SI configuration
is 92.28%, however, it is equal to 90.2% without us-
ing landmark features.
We present also the obtained confusion matri-
ces for the different configuration combinations (see
figure 6). Ideally, the diagonal entries of a confu-
sion matrix are equal to one and zeros everywhere
else. Globally, we can observe this trend in the ob-
tained confusion matrix. We can also observe a rel-
atively important confusion between the short com-
mands ”mute”, ”cooler”, and ”warmer”. These com-
mands have roughly speaking the same length and in-
duce the same visible lips movements, which explains
this confusion.
5 CONCLUSION
In this paper, we proposed a lipreading system for
driver-vehicle interaction based on near-infrared cam-
eras. The approach is based on a deep learning ar-
chitecture with two-stream network architectures that
combines both geometric and global visual features
extracted from the mouth region to improve the per-
formance of lipreading based only on visual cues.
Also, we constructed the first near-infrared lipread-
ing dataset for driver-car interaction, named infrared-
LR. The experimental results show, for both speaker-
dependent and speaker-independent configurations,
that our hybrid design produced a high performance
with a considerable improvement over applying only
the global-feature network.
REFERENCES
Afouras, T., Chung, J. S., and Zisserman, A. (2018). Deep
lip reading: a comparison of models and an online ap-
plication. arXiv preprint arXiv:1806.06053.
Anina, I., Zhou, Z., Zhao, G., and Pietik
¨
ainen, M. (2015).
Ouluvs2: A multi-view audiovisual database for non-
rigid mouth motion analysis. In Automatic Face and
Gesture Recognition (FG), 2015 11th IEEE Interna-
tional Conference and Workshops on, volume 1, pages
1–5. IEEE.
Assael, Y. M., Shillingford, B., Whiteson, S., and De Fre-
itas, N. (2016). Lipnet: Sentence-level lipreading.
arXiv preprint arXiv:1611.01599, 2(4).
Ben-Hamadou, A. (2020). Control method, control device,
system and motor vehicle comprising such a control
device. US Patent 10,627,898.
Chung, J. S., Senior, A. W., Vinyals, O., and Zisserman, A.
(2017). Lip reading sentences in the wild. In CVPR,
pages 3444–3453.
Chung, J. S. and Zisserman, A. (2017). Lip Reading in the
Wild. In Lai, S.-H., Lepetit, V., Nishino, K., and Sato,
Y., editors, Computer Vision – ACCV 2016, volume
10112, pages 87–103. Springer International Publish-
ing, Cham. Series Title: Lecture Notes in Computer
Science.
Chung, J. S. and Zisserman, A. (2018). Learning to lip read
words by watching videos. Computer Vision and Im-
age Understanding.
Estival, D., Cassidy, S., Cox, F., Burnham, D., et al. (2014).
Austalk: an audio-visual corpus of australian english.
In Proceedings of the International Conference on
Language Resources and Evaluation. Reykjavik, Ice-
land: European Language Resources Association.
Fernandez-Lopez, A. and Sukno, F. (2018). Survey on au-
tomatic lip-reading in the era of deep learning. Image
and Vision Computing.
Gutierrez, A. and Robert, Z. (2017). Lip reading word clas-
sification.
Harte, N. and Gillen, E. (2015). Tcd-timit: An audio-visual
corpus of continuous speech. IEEE Transactions on
Multimedia, 17(5):603–615.
Hazen, T. J., Saenko, K., La, C.-H., and Glass, J. R.
(2004). A segment-based audio-visual speech recog-
nizer: Data collection, development, and initial exper-
iments. In Proceedings of the 6th international confer-
ence on Multimodal interfaces, pages 235–242. ACM.
Howell, A. and Baker, L. (2015). Confusion Modelling for
Lip-Reading. PhD thesis, School of Computing Sci-
ences. University of East Anglia.
Kipf, T. N. and Welling, M. (2016). Semi-supervised clas-
sification with graph convolutional networks. arXiv
preprint arXiv:1609.02907.
Lan, Y., Theobald, B.-J., Harvey, R., Ong, E.-J., and Bow-
den, R. (2010). Improving visual features for lip-
reading. In Auditory-Visual Speech Processing 2010.
Lee, B., Hasegawa-Johnson, M., Goudeseune, C., Kamdar,
S., Borys, S., Liu, M., and Huang, T. (2004). Avicar:
Audio-visual speech corpus in a car environment. In
Eighth International Conference on Spoken Language
Processing.
Loshchilov, I. and Hutter, F. (2017). Decoupled weight de-
cay regularization. arXiv preprint arXiv:1711.05101.
Ma, P., Mart
´
ınez, B., Petridis, S., and Pantic, M. (2020). To-
wards practical lipreading with distilled and efficient
models. CoRR, abs/2007.06504.
Near-infrared Lipreading System for Driver-Car Interaction
637

Ma, P., Martinez, B., Petridis, S., and Pantic, M. (2021). To-
wards practical lipreading with distilled and efficient
models. In ICASSP 2021-2021 IEEE International
Conference on Acoustics, Speech and Signal Process-
ing (ICASSP), pages 7608–7612. IEEE.
Ma, P., Wang, Y., Petridis, S., Shen, J., and Pantic, M.
(2022). Training strategies for improved lip-reading.
In ICASSP 2022-2022 IEEE International Confer-
ence on Acoustics, Speech and Signal Processing
(ICASSP), pages 8472–8476. IEEE.
Martinez, B., Ma, P., Petridis, S., and Pantic, M. (2020).
Lipreading using temporal convolutional networks.
In ICASSP 2020-2020 IEEE International Confer-
ence on Acoustics, Speech and Signal Processing
(ICASSP), pages 6319–6323. IEEE.
McCool, C., Marcel, S., Hadid, A., Pietik
¨
ainen, M., Mate-
jka, P., Cernock
`
y, J., Poh, N., Kittler, J., Larcher, A.,
Levy, C., et al. (2012). Bi-modal person recognition
on a mobile phone: using mobile phone data. In Mul-
timedia and Expo Workshops (ICMEW), 2012 IEEE
International Conference on, pages 635–640. IEEE.
Mroueh, Y., Marcheret, E., and Goel, V. (2015). Deep mul-
timodal learning for audio-visual speech recognition.
In Acoustics, Speech and Signal Processing (ICASSP),
2015 IEEE International Conference on, pages 2130–
2134. IEEE.
Neti, C., Potamianos, G., Luettin, J., Matthews, I., Glotin,
H., Vergyri, D., Sison, J., and Mashari, A. (2000).
Audio visual speech recognition. Technical report,
IDIAP.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., et al. (2019). Pytorch: An imperative style,
high-performance deep learning library. Advances
in neural information processing systems, 32:8026–
8037.
Petridis, S., Shen, J., Cetin, D., and Pantic, M. (2018).
Visual-only recognition of normal, whispered and
silent speech. arXiv preprint arXiv:1802.06399.
Petridis, S., Wang, Y., Ma, P., Li, Z., and Pantic, M. (2020).
End-to-end visual speech recognition for small-scale
datasets. Pattern Recognition Letters, 131:421–427.
Rekik, A., Ben-Hamadou, A., and Mahdi, W. (2014). A new
visual speech recognition approach for rgb-d cameras.
In International conference image analysis and recog-
nition, pages 21–28. Springer.
Rekik, A., Ben-Hamadou, A., and Mahdi, W. (2015a). Hu-
man machine interaction via visual speech spotting.
In Advanced Concepts for Intelligent Vision Systems,
pages 566–574. Springer.
Rekik, A., Ben-Hamadou, A., and Mahdi, W. (2015b). Uni-
fied system for visual speech recognition and speaker
identification. In International Conference on Ad-
vanced Concepts for Intelligent Vision Systems, pages
381–390. Springer.
Rekik, A., Ben-Hamadou, A., and Mahdi, W. (2016).
An adaptive approach for lip-reading using image
and depth data. Multimedia Tools and Applications,
75(14):8609–8636.
Sagonas, C., Tzimiropoulos, G., Zafeiriou, S., and Pantic,
M. (2013). 300 faces in-the-wild challenge: The first
facial landmark localization challenge. In 2013 IEEE
International Conference on Computer Vision Work-
shops, pages 397–403. IEEE.
Sanderson, C. (2002). The vidtimit database. Technical
report, IDIAP.
Sheng, C., Kuang, G., Bai, L., Hou, C., Guo, Y., Xu, X.,
Pietik
¨
ainen, M., and Liu, L. (2022). Deep learning
for visual speech analysis: A survey. arXiv preprint
arXiv:2205.10839.
Stafylakis, T. and Tzimiropoulos, G. (2017). Combining
residual networks with lstms for lipreading. arXiv
preprint arXiv:1703.04105.
Sun, K., Yu, C., Shi, W., Liu, L., and Shi, Y. (2018). Lip-
interact: Improving mobile device interaction with
silent speech commands. In Proceedings of the 31st
Annual ACM Symposium on User Interface Software
and Technology, pages 581–593.
Wong, Y. W., Ch’ng, S. I., Seng, K. P., Ang, L.-M., Chin,
S. W., Chew, W. J., and Lim, K. H. (2011). A new
multi-purpose audio-visual unmc-vier database with
multiple variabilities. Pattern Recognition Letters,
32(13):1503–1510.
Wu, Y. and Ji, Q. (2019). Facial landmark detection: A
literature survey. International Journal of Computer
Vision, 127(2):115–142.
Zhao, G., Barnard, M., and Pietikainen, M. (2009). Lipread-
ing with local spatiotemporal descriptors. IEEE
Transactions on Multimedia, 11(7):1254–1265.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
638
