
Image-Based Fire Detection in Industrial Environments with YOLOv4
Otto Zell
1
, Joel P
˚
alsson
1
, Kevin Hernandez-Diaz
1 a
, Fernando Alonso-Fernandez
1 b
and Felix Nilsson
2
1
School of Information Technology (ITE), Halmstad University, Sweden
2
HMS Industrial Networks AB, Halmstad, Sweden
Keywords:
Fire Detection, Smoke Detection, Machine Learning, Computer Vision, YOLOv4.
Abstract:
Fires have destructive power when they break out and affect their surroundings on a devastatingly large scale.
The best way to minimize their damage is to detect the fire as quickly as possible before it has a chance to grow.
Accordingly, this work looks into the potential of AI to detect and recognize fires and reduce detection time
using object detection on an image stream. Object detection has made giant leaps in speed and accuracy over
the last six years, making real-time detection feasible. To our end, we collected and labeled appropriate data
from several public sources, which have been used to train and evaluate several models based on the popular
YOLOv4 object detector. Our focus, driven by a collaborating industrial partner, is to implement our system
in an industrial warehouse setting, which is characterized by high ceilings. A drawback of traditional smoke
detectors in this setup is that the smoke has to rise to a sufficient height. The AI models brought forward
in this research managed to outperform these detectors by a significant amount of time, providing precious
anticipation that could help to minimize the effects of fires further.
1 INTRODUCTION
The use of smoke detectors have become standard on
fire detection (Ahrens, 2021). They are excellent at
quickly detecting fires in regular households. There
are, however, still scenarios where a smoke detec-
tor could be improved upon. Buildings with large
volumes of non-fire smoke could cause false alarms,
causing the fire brigade to waste resources and possi-
ble penalties for the user. Likewise, warehouses with
ceilings high above the floor struggle with smoke not
reaching the detectors fast enough.
There are several types of detectors, each one with
different benefits and drawbacks (Accosta and Mar-
tin, 2017). Point smoke detectors, carbon monoxide
detector,s and aspirating detection systems all have a
general applicable maximum ceiling height of 10.5
meters. Optical beam smoke detectors have a maxi-
mum ceiling height of 25 meters, and 40 if configured
in extra sensitive mode. Optical beam smoke detec-
tors can detect fire in a very high ceiling but require
the smoke to rise to the height at which the detectors
are installed. This type of alarm also favors medium-
growth fires compared to fast-growth fires.
a
https://orcid.org/0000-0002-9696-7843
b
https://orcid.org/0000-0002-1400-346X
This research explores using neural networks to
detect fire and smoke in real time using images from
a camera stream. We do not aim at replacing smoke
detectors, but to explore the potential of Artificial In-
telligence (AI) for smoke and fire detection. This AI
would potentially work as an extra layer of protection,
integrated with a smoke detector for added security in
environments where the smoke detector might be less
efficient (Bu and Gharajeh, 2019).
This project is a collaboration of Halmstad Uni-
versity with HMS Networks AB in Halmstad. HMS
offers a portfolio of products for remote control of
field equipment and premises (HMS, 2022). They ex-
plore emerging technologies for industry, and one cru-
cial technology is AI, where they want to examine and
showcase different possibilities and applications of AI
and vision technologies, e.g. (Nilsson et al., 2020),
which may be part of future products. The datasets
and models trained during this research will be made
available in our repository
1
.
1
https://github.com/HalmstadUniversityBiometrics/Fire-
detection-in-industrial-environments-with-Yolov4
Zell, O., Pålsson, J., Hernandez-Diaz, K., Alonso-Fernandez, F. and Nilsson, F.
Image-Based Fire Detection in Industrial Environments with YOLOv4.
DOI: 10.5220/0011689400003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 379-386
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
379
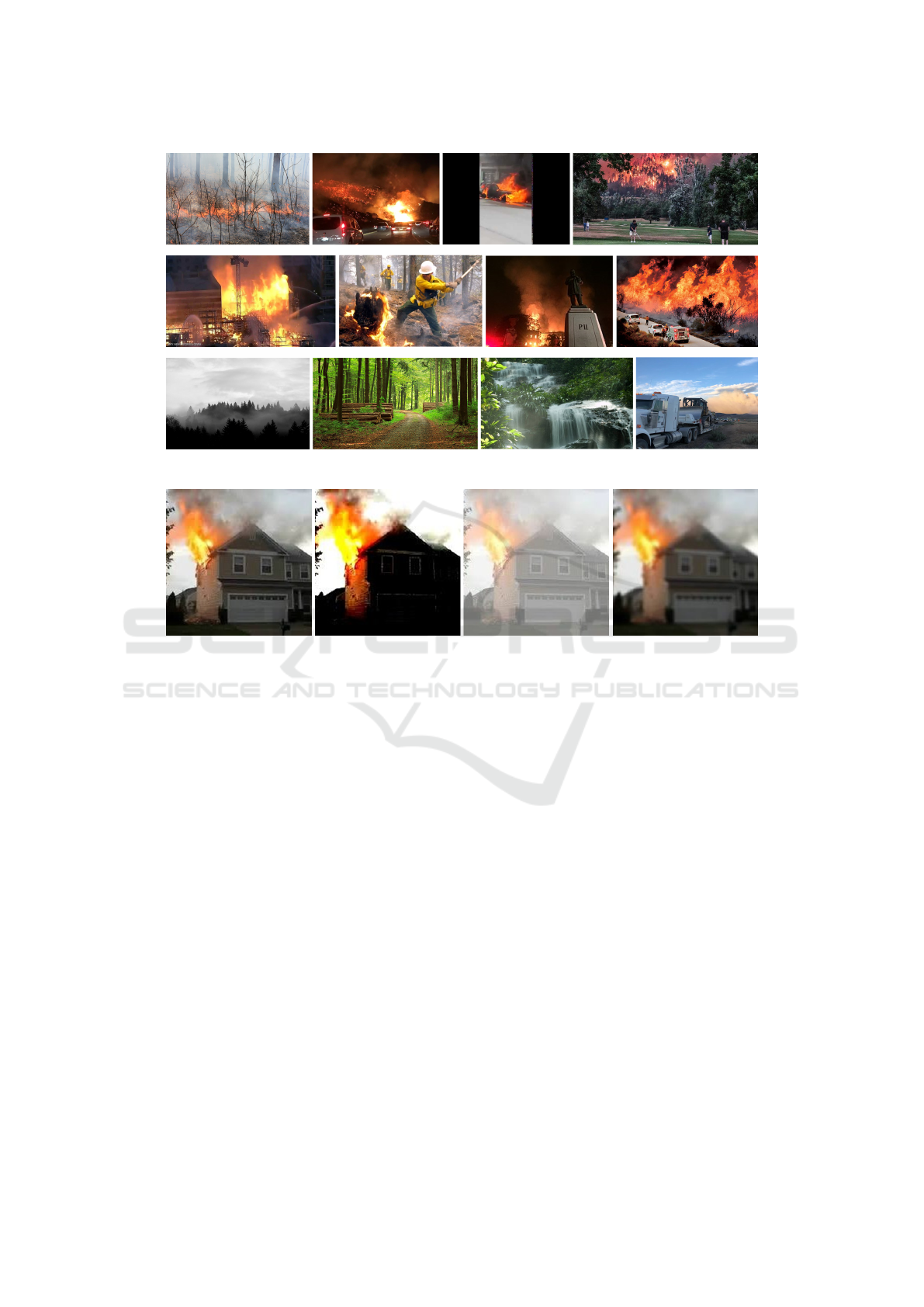
Figure 1: Examples of images from Dataset 2 with positive examples (rows 1,2) and negative examples (row 3).
Figure 2: Examples of data augmentation (first image: original, second: brightness, third: contrast, fourth: blur).
2 RELATED WORKS
There are several works related to fire detection using
chemical (Fonollosa et al., 2018) and camera-based
vision systems (Bu and Gharajeh, 2019). The lat-
ter covers different intelligent techniques (like CNNs,
color information, etc.) to detect fires in forest fires
and general indoor/outdoor environments.
(Gonzalez et al., 2017) demonstrated that fires
could accurately and quickly be identified using
CNNs, allowing real-time operations. It was part of
an Unmanned Autonomous Vehicle (UAV) system to
identify wildfires from above using drones, and cal-
culate location and distance. The CNN, based on
AlexNet, had an accuracy of 94.76%. The model was
trained on 450 positive and 50 negative images and
tested on 50 positive and 10 negative images repre-
senting aerial views of elements that could be mis-
classified as fire.
(Muhammad et al., 2019) proposed an architec-
ture based on SqueezeNet. The fully-connected lay-
ers are removed, and instead, binarization is applied
to feature maps of several layers, found to be sensi-
tive to fire regions. This provides the segmented fire,
allowing to calculate its size. Passing the image again
through the original SqueezeNet provides one of the
1000 classes of ImageNet, which can be used to de-
termine the situation in the scene, such as a fire in a
house, a forest, or a vehicle. A total of 68,457 images
from public sources were used, with 5258 fire images
and 5061 non-fire images used for training.
(Zhang et al., 2021) proposed a new architec-
ture for semantic segmentation where each individ-
ual pixel is labeled, an alternative to the classical
bounding box-based approach. Semantic segmenta-
tion holds much potential as it eliminates the extra
noise when drawing square boxes around fires. The
model is based on a U-Net segmentation network that
uses a modified SqueezeNet as encoder-encoder, and
an Attention Gate unit in the skip connections. Exper-
iments are targeted toward forest fires. Data is gath-
ered from public sets, consisting of 1135 fire/500 non-
fire images for segmentation experiments, and 565
fire/1990 non-fire for classification experiments. The
obtained accuracy is 93%, with an average prediction
time of 0.89 seconds per image.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
380

Table 1: Datasets employed to create each model, the number and predominant type of fires on each.
D1 D2 D3 D4 D5 #positive #negative #total type
Model1 X 361 51 412 candles, houses
Model2 X 1444 204 1648 candles, houses
Model3 X X 361 100 461 candles, houses, warehouses
Model4 X X 1109 295 1404 candles, houses, forest
Model5 X X 1444 400 1844 candles, houses, warehouses
(Abdusalomov et al., 2021) modified YOLOv3 to
detect fires in a variety of urban environments. They
also applied a variety of data augmentation techniques
(rotation, contrast, brightness) to 9,200 nighttime and
daytime flame pictures gathered from public sources,
obtaining 624,900 images. They also added 20,000
fire-like images to counteract false positives. An in-
teresting observation is that color-based augmentation
actually decreased training accuracy, very likely be-
cause fire color is an important attribute for its detec-
tion. They trained the model for 50,000 iterations,
finding that the test accuracy of YOLOv3 (97.8%)
is higher than other models based on tiny models
(YOLOvX-tiny) or other versions (YOLOv4).
(Avazov et al., 2022) improved YOLOv4 via data
augmentation and modifying the network as well.
Based on the wording and paper structure, it seems
that the data employed is the same as (Abdusalomov
et al., 2021), although the authors are different. The
9,200 source pictures are augmented to 80,400 via ro-
tation, contrast, and brightness modifications. 10,000
fire-like images are also added as negatives. On
this occasion, the test accuracy of YOLOv4 (96.3%)
is higher than other models based on tiny models
(YOLOvX-tiny) or previous versions (YOLOv3).
3 METHODOLOGY
3.1 Data Acquisition
Data had to be sourced and labeled manually since no
pre-existing labeled data could be found. Five data
sets were sourced and labeled, which will be referred
to as Datasets 1, 2, 3, 4, and 5. Dataset 1 was sourced
from (Avazov et al., 2022), with 412 images (51 neg-
ative), mostly of candles and houses burning. The
mentioned paper indicates 9200 images in total, but in
the authors’ repository, we only found 412 available
images. Dataset 2 was sourced from kaggle.com
2
,
with 992 images (244 negative), mostly of outdoor
fires in forests, and a few houses and cars burning.
Negative images are from nature, e.g.: forest, tree,
2
https://www.kaggle.com/datasets/phylake1337/fire-
dataset
grass, river, people, foggy forest, lake, animal, road,
and waterfall. Dataset 3 was sourced from pictures
of warehouses from istockphoto.com, containing only
49 negative images. All sets were labeled manually.
Data set 4 and 5 are augmented versions of Dataset
1 and 3, respectively, quadrupling the size by chang-
ing brightness, contrast, and blur. Brightness was
increased by 50%, contrast by 50%, and the picture
blurred by 5 with OpenCV.
Figure 1 shows some examples from Dataset 2,
whereas an example of data augmentation can be seen
in Figure 2.
3.2 System Overview
This research has developed an AI to detect fires and
smoke with a camera. Object detection is a common
classification problem that attempts to find and clas-
sify specific objects in a frame. Several techniques
have been developed in this branch of machine learn-
ing. When choosing a model for this research, a cou-
ple of requirements had to be met. The most criti-
cal was the real-time requirement and the fact that we
plan to deploy it on an NVIDIA Jetson nano. This
narrows down the choice to one-stage object detec-
tors. Picking a one-stage over a two-stage detector
means sacrificing mAP (Mean Average Precision) for
speed (Li et al., 2017).
Two models match our requirements: YOLOv4
(Bochkovskiy et al., 2020) and EfficientDet (Tan
et al., 2020). EfficientDet falls behind YOLOv4 in
speed and mAP (Wu et al., 2020), so it will be our
choice for this work. YOLO detectors also have
features that other models lack, such as contextual
awareness, seeing the entire image during training to
obtain a ‘bigger picture’ and detect objects more ac-
curately because of context. This is advantageous for
our purpose (Bochkovskiy et al., 2020), since con-
text matters when it comes to fires. Previous work
also suggests that YOLOv4 performs well for real-
time fire detection (Avazov et al., 2022).
Image-Based Fire Detection in Industrial Environments with YOLOv4
381
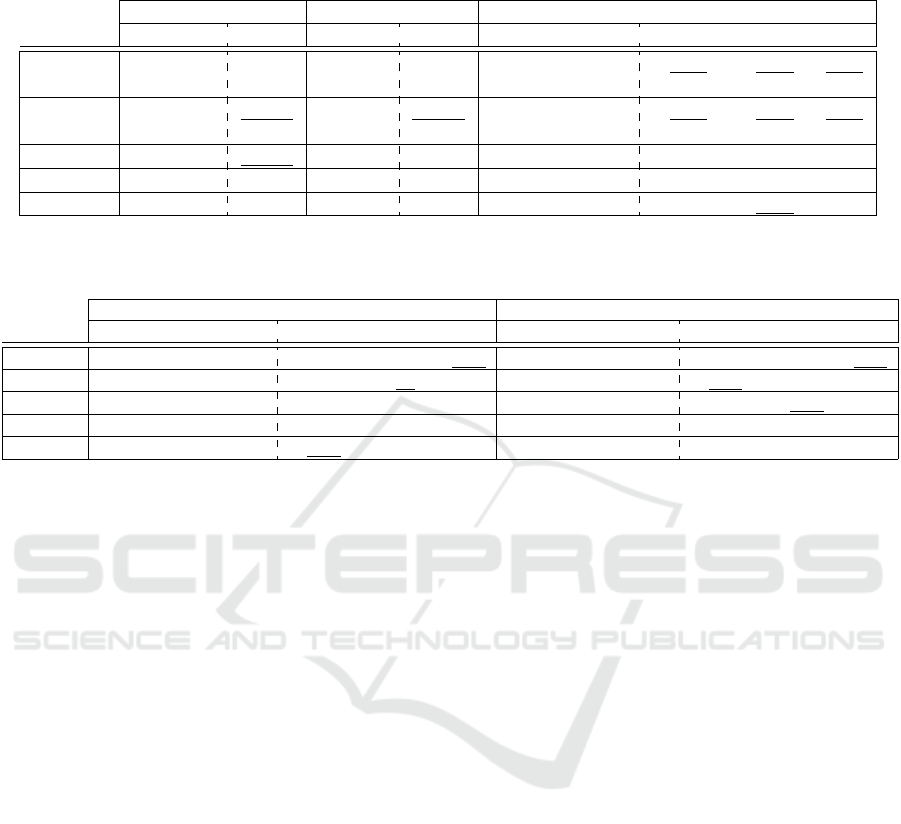
Table 2: Comparison of models from an object detection perspective. Bold numbers indicate the best result of each column,
whereas underlined numbers indicate the runners-up.
Fire Smoke Fire + Smoke
TP FP AP TP FP AP TP FP FN Precision Recall F1
Model1 236 79 75.2% 61 28 53.2% 297 107 117 74% 72% 73%
Model1A 205 231 47.5% 60 27 53.2% 265 258 142 51% 65% 57%
Model2 240 63 81.2% 62 35 58.2% 302 98 105 75% 74% 75%
Model2A 203 217 57.0% 62 37 56.9% 265 254 142 51% 65% 57%
Model3 245 74 81.7% 63 80 52.0% 308 154 99 67% 76% 71%
Model4 200 141 64.8% 49 35 42.2% 249 176 158 59% 61% 60%
Model5 242 55 82.3% 55 19 59.5% 297 74 110 80% 73% 76%
Table 3: Comparison of models from an object recognition perspective. Bold numbers indicate the best result of each column,
whereas underlined numbers indicate the runners-up.
Fire Smoke
TP TN FP FN Precision Recall F1 TP TN FP FN Precision Recall F1
Model 1 145 28 3 2 97.9 98.6 98.2 66 94 3 15 81.5 97.1 88.6
Model 2 144 30 1 3 99.3 98 98.6 71 93 4 10 94.7 87.6 91.0
Model 3 141 28 3 6 97.9 95.9 96.9 76 87 10 5 88.4 93.8 91.0
Model 4 136 25 6 11 95.8 92.5 94.1 68 82 15 13 81.9 84 82.9
Model 5 141 29 2 6 98.6 95.9 97.2 64 96 1 17 98.4 79 87.6
4 EXPERIMENTS AND RESULTS
Five YOLO models have been trained for this paper to
detect two classes, fire and smoke. Each model em-
ploys a certain combination of the available datasets,
as described in Table 1. Data division for train-
ing/testing is 80/20%.
The training parameters are batch size of
64, resolution=576×576 (RGB images), momen-
tum=0.949, decay=0.0005, learning rate=0.001, burn-
in=1000. The models are trained on a machine with
an Nvidia RTX 3070 GPU with 8Gb RAM and an
AMD Ryzen 7 5700x CPU with 32GB RAM during
3000 iterations.
The models are evaluated from an object detection
and recognition/classification perspective.
Object detection is defined as the model detecting
all individual objects in the picture, e.g. if there are 5
fires, they are all detected.
A True Positive (TP) is when the Intersection Over
Union (IoU) of the predicted and ground-truth bound-
ing boxes is greater than a pre-defined threshold (in
this paper, we use 0.5) and the class is correctly at-
tributed. A False Positive (FP) is when the IoU is
below the threshold. A False Negative (FN) is when
there is no predicted bounding box over a ground-
truth box, or the predicted bounding box is attributed
to another class. Table 2 gives the results of our ex-
periments.
Precision measures the proportion of true pos-
itives of a class that are correct, computed as
P=TP/(TP+FP). Recall measures the proportion of ac-
tual positives of a class that were predicted correctly,
computed as R=TP/(TP+FN). High precision but low
recall means that the majority of positive classifica-
tions are positives, but the model detects only some
of the positive samples (in our case, it would mean
missing many fires or smokes). Low precision but
high recall means that the majority of positive sam-
ples are classified correctly (i.e. few fires or smokes
are missed), but there are also too many false posi-
tives (i.e. fire or smoke detections that are not true). A
single metric that summarizes both parameters is the
F1 score, computed as F1=2×(P×R)/(P+R). A high
F1 score means that both P and R are high, and vice-
versa. Varying the IoU threshold, a precision-recall
curve can be obtained, showing the trade-off between
the two metrics for different thresholds. The Average
Precision (AP) is the area under the precision-recall
curve, providing a single metric that does not consider
the selection of a particular threshold.
From Table 2, it can be seen that Model5 is gen-
erally the best, followed by Model2. These are the
models whose databases contain the highest amount
of images (Table 1), so this factor could be playing
a role. However, Model4, which uses a similar num-
ber of images, usually shows the worst performance,
the only difference being that it contains images of
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
382

Figure 3: Original (left) and recalculated (right) anchors
boxes shown on a 576×576 canvas.
outdoor fires in the forest, in addition to candles and
burning houses. The A after Model1 and Model2 re-
fer to recalculated anchor boxes being used. Recal-
culations were done with the inbuilt anchor recalcu-
lation algorithm provided in the darknet repository.
The algorithm uses k-means clustering to estimate the
ideal anchor boxes. In Figure 3, we show the original
and recalculated anchor boxes, with the recalculated
being generally larger. We use the default number of
16 boxes. Increasing the number of boxes could po-
tentially increase accuracy but at the cost of execution
time. From the results, it can be seen that the models
with recalculated anchors generally perform worse (in
fire or fire+smoke numbers). In smoke detection, they
do not show a significant difference. Our interpreta-
tion is that the recalculated anchor boxes are larger
due to the smoke generally taking up much of the pic-
ture’s area compared to fires. As a result, smoke de-
tection is not affected by the new anchor boxes, while
fires are strongly affected since they do not necessar-
ily take a portion of the image as large as the smoke.
An alternative would be to recalculate the anchors
separately for each class. From Table 2, we also ob-
serve that fire detection is more accurate than smoke
detection in our experiments. This could pose a chal-
lenge e.g. if smoke is visible earlier than the flames.
Object recognition or classification is defined as
the model correctly labeling a picture with fire if it re-
ally contains fire (one or several), e.g. on an image
with 5 fires, if at least one is detected, it is counted as
a TP. A FP is when a box is placed over no fire. A FN
is when there is a fire, but no fire is detected. A TN
is when an image without fire or smoke is labeled as
such. Table 3 gives the results from an object recogni-
tion perspective. Here, Model2 and Model1 come out
on top (in terms of F1 score), although Model5 comes
next at a short distance. Thus, Model2 works well
for both the object detection and recognition perspec-
tives. Again, fire detection appears as more accurate
than smoke detection. If we concentrate on another
measures, Model1 shows the best recall, although its
precision is not among the best. A high recall means
that this model would miss fewer fires, which is more
critical, at the cost of more false positives. Another
commonality is that Model4 is the worst model in
object recognition as well, despite using a similar
amount of training and test data than Model2. Model4
is built from Datasets 1 and 2, whereas Model2 is
built from Dataset 4, which is an augmented version
of Dataset 1 (Table 1). Data augmentation, as carried
out in Dataset 4, seems to have a more positive effect
than combining different datasets.
When comparing the object detection and object
recognition perspectives (Table 2 vs Table 3), it can
be observed that object detection (finding individual
fires or smoke in a picture) is much more difficult
than object recognition (marking if an image has fire
or smoke). The latter may be sufficient to just raise
an alarm as soon as some fire or smoke has been de-
tected. In Table 4, we show the results of this paper
together with other approaches as reported in the re-
lated literature. We report our Model2 (object recog-
nition perspective). Although the different methods
are not fully comparable due to the use of different
databases or protocols, our approach shows compar-
atively a very competitive performance, with an F1
score of 98.6%.
A difference that must be mention though is that
all compared approaches have the goal of forest fire
prevention, with data coming from satellite pictures.
In addition, the datasets of some of those papers are
not public (Avazov et al., 2022; Abdusalomov et al.,
2021), which means that replication is difficult.
To conclude, we carried out a visual evaluation of
our model applied to a video showing fires purposely
started inside a warehouse. The frames of such video
are not included in the datasets gathered for this paper.
A few snapshots are shown in Figure 4. The first part
of the video shows a concealed fire behind wooden
boxes. Our system detected the first indications of
fire at 4:23, whereas the fire alarm at the ceiling ac-
tivated at 4:35, meaning a 12 seconds gain. In the
second part of the video, the fire is just concealed be-
hind some boxes, and our method starts to pick it up
very quickly when the flames have not yet reached too
much height (at 9 seconds). The ceiling alarm on the
left does not catch it up until the flames reach a suffi-
cient height, which happens after 32 seconds, mean-
ing a 23 seconds gain with the camera-based system.
The ceiling alarm on the right part takes even more,
catching the fire after 43 seconds.
5 CONCLUSIONS
This work studies the use of camera-based algorithms
for fire and smoke detection in industrial environ-
Image-Based Fire Detection in Industrial Environments with YOLOv4
383
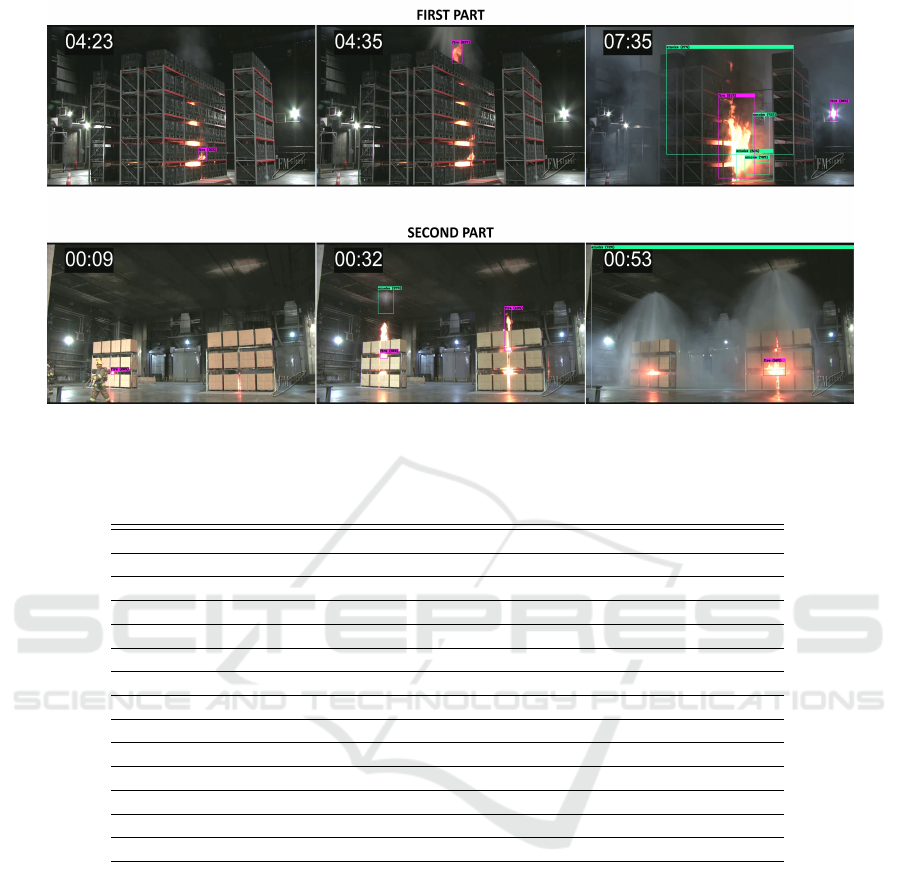
Figure 4: Snapshots of our method applied to a video with fire and smoke. The full video is available at the url: https:
//github.com/HalmstadUniversityBiometrics/Fire-detection-in-industrial-environments-with-Yolov4.
Table 4: Comparison to other works in the literature.
Source Algorithm Precision Recall F1
(Muhammad et al., 2019) SqueezeNet 86.0 97.0 91.0
(Abdusalomov et al., 2021) AlexNet 82.0 98.0 75.1
(Abdusalomov et al., 2021) Elastic-YOLOv3 98.5 96.9 97.7
(Abdusalomov et al., 2021) YOLOv3-incremental 97.9 91.2 94.3
(Abdusalomov et al., 2021) Faster R-CNN 81.7 94.5 87.2
(Abdusalomov et al., 2021) Dilated CNNs 98.9 97.4 98.2
(Abdusalomov et al., 2021) ResNet 94.8 93.6 94.2
(Abdusalomov et al., 2021) VGG16 97.5 87.9 98.0
(Abdusalomov et al., 2021) YOLOv5 98.5 96.7 98
(Abdusalomov et al., 2021) YOLOv3+OHEM 86.6 77.8 89.2
(Abdusalomov et al., 2021) YOLOv4 95.9 96.7 88.3
(Abdusalomov et al., 2021) YOLOv3 improved 98.1 99.2 99.5
(Avazov et al., 2022) YOLOv4 98.2 99.7 99.7
ours YOLOv4 99.3 98.0 98.6
ments like warehouses. For such purpose, we have
gathered and labeled appropriate data, and evaluated
several models based on the popular YOLOv4 ar-
chitecture (Bochkovskiy et al., 2020). Our method
achieves a competitive accuracy compared to other
solutions in the literature, although they are mostly
focused on detecting forest fires. The amount and rel-
evance of the training data could be improved, since
most of it consists of candles, houses and forest fires.
But even with this consideration, the trained YOLO
models grasped the concept of fire and generalized
well over unseen data, as observed in Figure 4. Our
approach performs well in high ceiling environments,
showing a substantial decrease in detection time. The
improvement in detection time over regular smoke
alarms is expected to scale with the ceiling height,
since fire detectors must wait for the smoke to rise
(Accosta and Martin, 2017). Sufficient coverage with
several cameras would also reduce the likelihood of
concealed fires that remain undetected, such as the
one in the top part of Figure 4.
Some sources of false alarms (as seen in Fig-
ure 4) are the water from the ceiling alarm (detected
as smoke), or very bright light sources (detected as
a fire). This issue should be considered further for
the system to not be misled by water/mist flows or
spotlights. Currently, our method carries out detec-
tion on a frame-by-frame basis. A solution to increase
the overall accuracy would be to average the output
across several frames. This would remove random
anomalies (false positives) that may appear at isolated
frames while accumulating confidence over time of
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
384

detections (true positives), even if at some individual
frames, their confidence is not so high or are missed
(false negatives). To help in this mission, we could
also incorporate tracking methods to analyze image
regions where previously there was a detection with
high accumulated confidence. It should be considered
that such solutions would come at the cost of increas-
ing the detection time, although it could be mitigated
if the sensor and the system can cope with a sufficient
frame rate.
The different performance of fire and smoke de-
tection is also worth studying further by examining
the composition of the datasets and maybe training
a separate method for each. Since smoke may ex-
pand faster than flames, it can provide an earlier clue
for the detection task, so improving its performance
is highly relevant. Also, newer real-time detectors
like YOLOR (Wang et al., 2021) are showing higher
speed than YOLOv4 while keeping accuracy, which
could favor its deployment to embedded devices in
industrial settings. This system was released after the
course of this investigation, so it is saved for future
work.
When deploying a fire detection system like the
one in this paper, one must consider the various
ethical questions related to camera-based detection,
due to humans potentially appearing in the footage.
Whenever a camera is capturing or streaming such
type of data to a remote location, privacy, security,
and GDPR concerns emerge. These concerns would
be significantly counteracted via edge computing,
with data processed as close as possible to where it
is being captured, diminishing transmission of sensi-
tive data to a different location through data networks.
In this regard, edge devices usually have fewer com-
puting capabilities, which is the reason why we are
aiming at deploying our system to suitable hardware,
such as NVIDIA Jetson nano. This also connects with
using detectors with low latency, such as YOLOR, as
mentioned above. Also, necessary frames must be
deleted as soon as computations are done. The present
system only uses one frame, but even combining sev-
eral frames with sufficient frame rate would mean that
the necessary data to be processed only affects a few
milliseconds of footage. Handling the data in this way
means that no sensitive data would ever be stored, or
transmitted elsewhere.
ACKNOWLEDGEMENTS
This work has been carried out by Otto Zell and
Joel P
˚
alsson in the context of their Bachelor Thesis
at Halmstad University (Computer Science and En-
gineering), with the support of HMS Networks AB
in Halmstad. Authors Hernandez-Diaz and Alonso-
Fernandez thank the Swedish Research Council (VR)
and the Swedish Innovation Agency (VINNOVA) for
funding their research.
REFERENCES
Abdusalomov, A., Baratov, N., Kutlimuratov, A., and
Whangbo, T. K. (2021). An improvement of the fire
detection and classification method using yolov3 for
surveillance systems. Sensors, 21(19).
Accosta, R. and Martin, D. (2017). Smoke detector spacing
for high ceiling spaces. Technical report, National Fire
Protection Association, NFPA.
Ahrens, M. (2021). Smoke alarms in us home fires. Tech-
nical report, National Fire Protection Association,
NFPA.
Avazov, K., Mukhiddinov, M., Makhmudov, F., and Cho,
Y. I. (2022). Fire detection method in smart city envi-
ronments using a deep-learning-based approach. Elec-
tronics, 11(1).
Bochkovskiy, A., Wang, C.-Y., and Liao, H.-Y. M. (2020).
Yolov4: Optimal speed and accuracy of object detec-
tion.
Bu, F. and Gharajeh, M. S. (2019). Intelligent and vision-
based fire detection systems: A survey. Image and
Vision Computing, 91:103803.
Fonollosa, J., Sol
´
orzano, A., and Marco, S. (2018). Chem-
ical sensor systems and associated algorithms for fire
detection: A review. Sensors, 18(2).
Gonzalez, A., Zuniga, M. D., Nikulin, C., Carvajal, G.,
Cardenas, D. G., Pedraza, M. A., Fernandez, C. A.,
Munoz, R. I., Castro, N. A., Rosales, B. F., Quinteros,
J. M., Rauh, F. J., and Akhloufi, M. A. (2017). Ac-
curate fire detection through fully convolutional net-
work. In 7th Latin American Conference on Net-
worked and Electronic Media (LACNEM 2017), pages
1–6.
HMS (2022). https://www.hms-networks.com.
Li, Z., Peng, C., Yu, G., Zhang, X., Deng, Y., and Sun,
J. (2017). Light-head r-cnn: In defense of two-stage
object detector.
Muhammad, K., Ahmad, J., Lv, Z., Bellavista, P., Yang, P.,
and Baik, S. W. (2019). Efficient deep cnn-based fire
detection and localization in video surveillance appli-
cations. IEEE Transactions on Systems, Man, and Cy-
bernetics: Systems, 49(7):1419–1434.
Nilsson, F., Jakobsen, J., and Alonso-Fernandez, F. (2020).
Detection and classification of industrial signal lights
for factory floors. In 2020 International Conference
on Intelligent Systems and Computer Vision (ISCV),
pages 1–6.
Tan, M., Pang, R., and Le, Q. V. (2020). Efficientdet: Scal-
able and efficient object detection. In 2020 IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 10778–10787, Los Alamitos, CA,
USA. IEEE Computer Society.
Image-Based Fire Detection in Industrial Environments with YOLOv4
385

Wang, C.-Y., Yeh, I.-H., and Liao, H.-Y. M. (2021). You
only learn one representation: Unified network for
multiple tasks. arXiv preprint arXiv:2105.04206.
Wu, D., Lv, S., Jiang, M., and Song, H. (2020). Using chan-
nel pruning-based yolo v4 deep learning algorithm for
the real-time and accurate detection of apple flowers
in natural environments. Computers and Electronics
in Agriculture, 178:105742.
Zhang, J., Zhu, H., Wang, P., and Ling, X. (2021). Att
squeeze u-net: A lightweight network for forest fire
detection and recognition. IEEE Access, 9:10858–
10870.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
386
