
Deep Neural Network Based Attention Model for Structural Component
Recognition
Sangeeth Dev Sarangi
a
and Bappaditya Mandal
b
Keele University, Newcastle-under-Lyme ST5 5BG, U.K.
Keywords:
Synchronous Attention, Dual Attention Network, Structural Component Recognition.
Abstract:
The recognition of structural components from images/videos is a highly complex task because of the appear-
ance of huge components and their extended existence alongside, which are relatively small components. The
latter is frequently overestimated or overlooked by existing methodologies. For the purpose of automating
bridge visual inspection efficiently, this research examines and aids vision-based automated bridge component
recognition. In this work, we propose a novel deep neural network-based attention model (DNNAM) archi-
tecture, which comprises synchronous dual attention modules (SDAM) and residual modules to recognise
structural components. These modules help us to extract local discriminative features from structural compo-
nent images and classify different categories of bridge components. These innovative modules are constructed
at the contextual level of information encoding across spatial and channel dimensions. Experimental results
and ablation studies on benchmarking bridge components and semantic augmented datasets show that our pro-
posed architecture outperforms current state-of-the-art methodologies for structural component recognition.
1 INTRODUCTION AND
BACKGROUND WORKS
Critical infrastructures like bridges are extremely im-
portant during any environmental disaster because the
movement of people and vehicles across their con-
structions is made possible. As a result, inspect-
ing bridges and other comparable structures might be
considered a high-priority and mission-critical task.
Manual examination of structural problems necessi-
tates lengthy but essential decision-making periods,
delaying assessment and damage control, manage-
ment, mitigation and recovery actions. Computer vi-
sion and machine learning based concrete structural
health inspection/monitoring bring great benefits such
as better safety and security for humans, non-contact,
at a (long) distance, rapid, cheap cost and labour, and
low interference with the regular functioning of in-
frastructures.
The technique of locating and identifying distinc-
tive sections of a structure using structural compo-
nent recognition is anticipated to be a crucial first step
in the automated inspection/management of civil in-
frastructure. Recognition of structural components
a
https://orcid.org/0000-0002-8427-031X
b
https://orcid.org/0000-0001-8417-1410
also offers significant supporting data for the auto-
mated vision-based damage assessment of civil con-
structions. Information on structural components can
be utilised to improve the consistency of automated
damage detection algorithms by removing damage
like patterns on items other than the structural compo-
nent of interest. Additionally, knowledge of structural
components is necessary for the safety assessment of
the entire structure because, according to the majority
of current structural inspection guidelines, damage,
and the structural components on which the damage
appears are jointly evaluated to determine the safety
rating (Spencer et al., 2019).
Structural component recognition using images
is a very challenging task due to the appearance of
large components and their long continuation, exist-
ing jointly with very small components, the latter is
often missed by the existing methodologies. In the
background literature, various categories of the bridge
components are exploited at the contextual level of in-
formation encoding across spatial as well as channel
dimensions and this is achieved by deploying the at-
tention mechanism in the model. Our research aims
to develop novel contextual information in the deep
convolutional neural network coupled with an atten-
tion model (DNNAM) for the automatic recognition
of civil structural components on image/video data.
Sarangi, S. and Mandal, B.
Deep Neural Network Based Attention Model for Structural Component Recognition.
DOI: 10.5220/0011688400003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
317-326
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
317

1.1 Structural Component Recognition
Using Deep Learning
Deep learning based approaches for recognising
structural components have recently attracted a lot
of attention. One of the main uses of convolu-
tional neural networks (CNNs) is image classifica-
tion, which involves estimating a single representa-
tive label from an input image. In order to accurately
identify the region of interest, Yeum et al. (Yeum
et al., 2019) classified candidate image patches of the
welded joints of a highway sign truss construction
using CNNs. Gao and Mosalam used CNNs (Gao
and Mosalam, 2018) for classifying input photos into
the relevant structural component and damage cate-
gories. Based on the outputs of the final convolu-
tional layer, the authors approximated the localisation
of the target item. Algorithms for object detection
can also be used to identify structural elements. By
automatically drawing bounding boxes around them,
(Liang, 2019) employed the faster R-CNN technique
to recognise and localise bridge components. An-
other effective method for addressing structural com-
ponent recognition issues is semantic segmentation
(Narazaki et al., 2017; Narazaki et al., 2018; Narazaki
et al., 2020). Semantic segmentation algorithms pro-
duce label maps with the same resolutions as the input
images rather than drawing bounding boxes or esti-
mating approximate object locations from per-image
labels. This is especially useful for precisely detect-
ing, localising and classifying complex-shaped struc-
tural components (Spencer et al., 2019).
1.2 Attention Mechanism
In order to obtain cutting-edge performance and in-
dustry usable solutions, an attention mechanism with
the CNN framework has been developed for extract-
ing local discriminative features. Such networks
are initially employed for sequential data analysis
(Vaswani et al., 2017) as well as general image clas-
sification (Wang et al., 2017). Park et al. (Park et al.,
2018) and Woo et al. (Woo et al., 2018) looked into
how channel and spatial attention modules affected
feature discrimination. Attention modules have been
used for a variety of tasks, including object detec-
tion (Zhu et al., 2018; Zhou et al., 2020), multi-
label classification (Guo et al., 2019), saliency pre-
diction (Wang and Shen, 2017) and pedestrian at-
tribute recognition (Tan et al., 2019). Long-range
content-based interaction is used as the main prim-
itive in this mechanism to get rid of convolution’s
poor scaling feature for wider receptive fields. Sur-
prisingly, Cordonnier et al. (Cordonnier et al., 2019)
research showed that the self-attention block’s oper-
ation is comparable to that of convolutional layers,
with the potential for the same or higher performance
(Bhattacharya et al., 2021).
In more recent research, the StructureNet frame-
work by Kaothalkar et al. (Kaothalkar et al., 2022),
makes a contribution to the recognition of structural
components by putting forth a novel architecture that
combines class contexts and inter-category interac-
tions discovered through the creation of a 3-D atten-
tion map. Contextual data is taken into account from
a categorical perspective in class contexts, which is an
aggregation of characteristics belonging to that class
(Zhang et al., 2019). However, it lacks focus on spe-
cific portions of the structural components that might
be crucial information for their recognition.
2 PROPOSED METHODOLOGY
The proposed DNNAM architecture consists of syn-
chronous dual attention modules (SDAM) and resid-
ual modules, which together aid in the extraction
of crucial discriminative characteristics from various
scales to enhance the performance of both multi-
target multi-class and single-class classification. Fig.
1 shows the proposed architecture.
2.1 Residual Module
Deep convolutional neural networks have made sig-
nificant improvements to image categorization chal-
lenges. To address the vanishing gradient issue with a
more complex architecture, ResNet (He et al., 2016)
adds skip connections from the previous layers. Fig.
2 (a) shows the architectural components of our resid-
ual module. We stacked 3 convolution layers together
and used skipped connection technique to establish an
additional link between the input and output tensor. In
our DNNAM model, we undertake feature extraction
using filters of various kernel sizes employing a large
number of residual blocks, ensuring a deeper network
with the capacity to capture a wide range of structural
component features. The synchronous dual attention
module is sandwiched between residual modules to
improve receptivity and the possibility of receiving
salient local discriminative information.
2.2 Synchronous Dual Attention
Module
The synchronous dual attention module fuses crucial
attention operations, including self, spatial, and chan-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
318
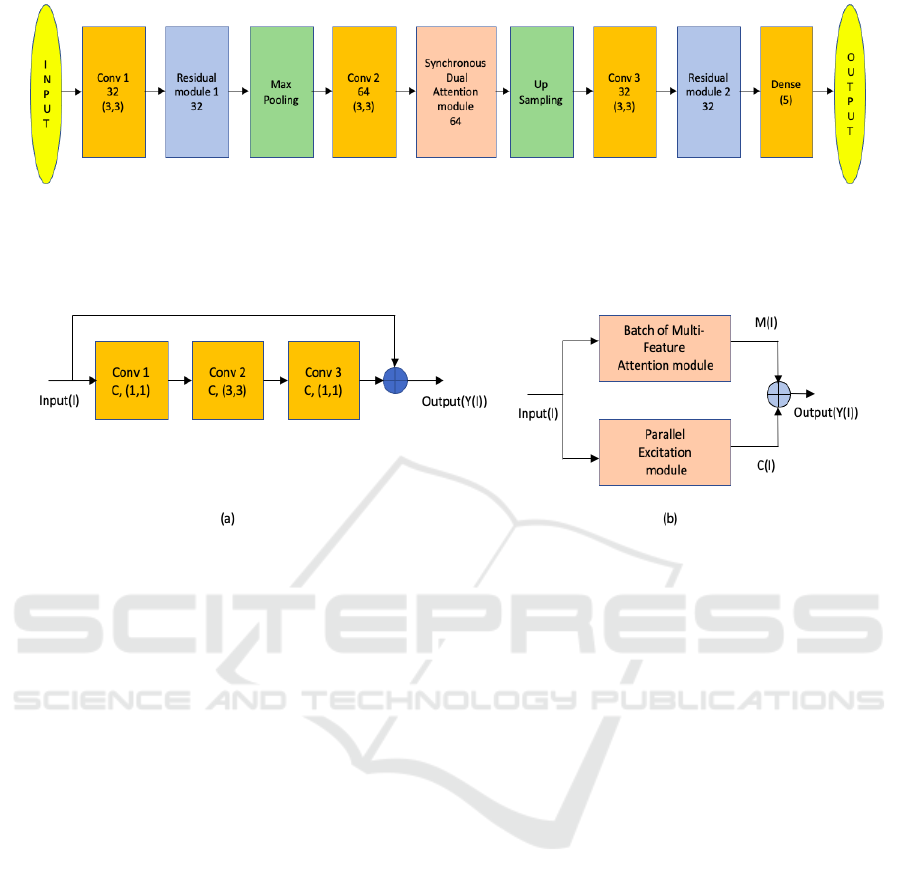
Figure 1: Proposed DNNAM Architecture model for structural component recognition. Here Conv block represents convolu-
tional operation with the first number representing the number of filters and the next two numbers giving the filter dimension
for each channel. Dense represents the dense layer, where the first number gives the number of nodes. The proposed syn-
chronous dual attention module is composed of a batch of multi-feature attention module and a parallel excitation module.
The number denoted in the synchronous dual attention module and residual module represents filter size.
Figure 2: (a) Proposed residual module for DNNAM architecture. Here Conv block represents convolutional operation with
the first number representing the number of filters and the next two numbers giving the filter dimension for each channel.
(b) Proposed Synchronous dual attention module for DNNAM architecture is composed of a batch of multi-feature attention
module and a parallel excitation module.
nel attention synchronously and aggregates their re-
sults to highlight discriminative features for multiple
target structural component classes. The block dia-
gram shown in Fig. 2 (b) is comprised of two mod-
ules: a batch of multi-feature attention module and a
parallel excitation module. The batch of multi-feature
attention module (BMFA) is created to encode several
representations of extremely localised features, allow-
ing the network to pick up on even the smallest com-
ponent classes. The parallel excitation module (PEM)
is used to synchronously highlight the significant as-
pects and lessen the impact of weak or unimportant
features as it encodes the spatial and channel informa-
tion for artefacts. To increase the impact of the syn-
chronous dual attention module, the outputs of these
two attention modules are fused together.
2.2.1 Batch of Multi-Feature Attention Module
We use a batch of multi-feature attention module
to combine several representations of the highly lo-
calised parallel feature extraction process in order to
encode relevant information from visually identical
concrete structural components. To distinguish be-
tween non-bridge, columns, beams and slabs, other
structural, and other non-structural components, this
module serves to encapsulate highly localised feature
selection mechanisms. To ensure that the most sig-
nificant aspects are attended to, the attention actions
in this proposed module are repeated several times.
To produce parallel non-linear projections in feature
space, each attention module uses three dense lay-
ers to conduct synchronous computations. Here, the
input (I), is taken into account along with its corre-
sponding height, width and the number of channels.
Then, the outputs T2 and T3 are multiplied elemen-
tally, a So f tMax function is used to create the at-
tention mask, and T1 is multiplied with the attention
mask to emphasise the critical features. The identity
mapping is then carried out by the addition of an input
tensor to the output. The output of the BMFA mod-
ule, which aggregates attentive features from several
representations, is produced by adding all three of the
outputs generated by the attention operations att1, att2
and att3. Fig. 3 shows the batch of multi-feature at-
tention module.
2.2.2 Parallel Excitation Module
In order to synchronously encode salient spatial and
channel information, the convolution layer captures
local spatial features across all of the channels (He
et al., 2016; Hu et al., 2018). We must selectively
draw attention to and suppress other aspects while
Deep Neural Network Based Attention Model for Structural Component Recognition
319
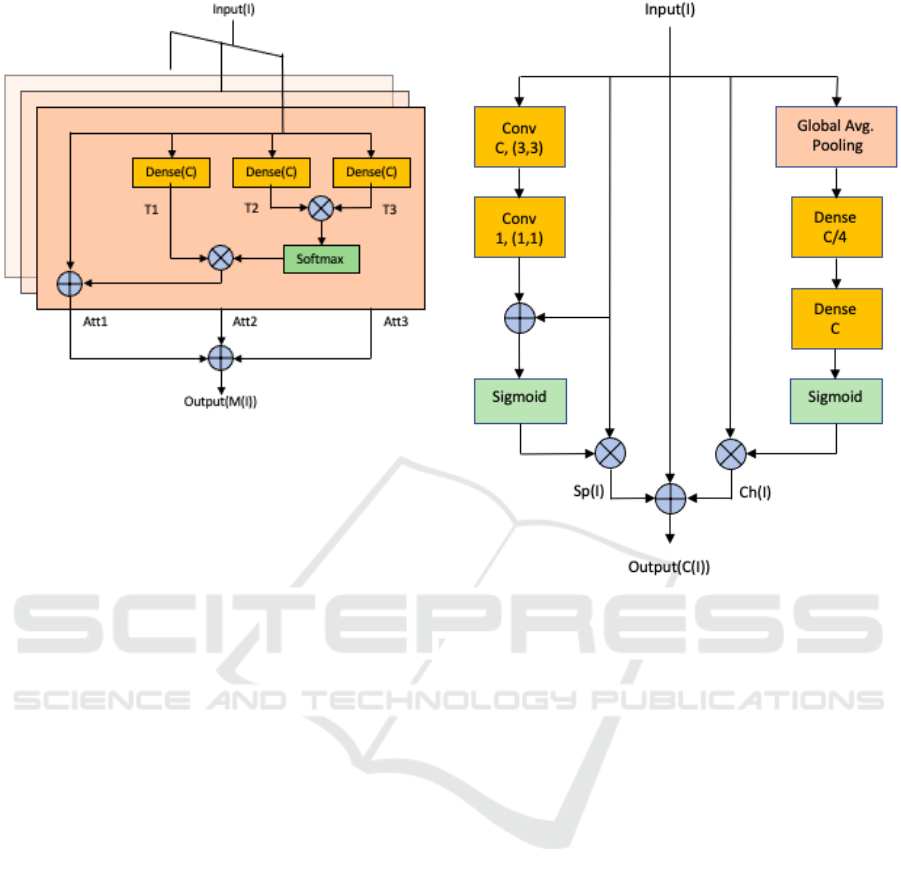
Figure 3: The Batch of multi-feature attention module is
a combination of 3 self-attention layers. In each layer, the
Input(I), together with its matching height, width, and chan-
nel count, are taken into consideration. The attention mask
is then created using the SoftMax function, the outputs T2
and T3 are multiplied elementally, and T1 is multiplied with
the attention mask to highlight the important features. After
that, the identity mapping is completed by adding an input
tensor to the output.
emphasising the channel wise discriminative struc-
tural component features. The parallel excitation
module analyses the key spatial and channel informa-
tion individually to address these issues and enhance
performance. This module includes a function that
squeezes the input tensor’s spatial plane using global
average pooling before stimulating it channel wise to
get channel information. The module can automat-
ically contain the global channel description thanks
to the channel squeezing operation, which provides
statistics for the entire image on a channel by chan-
nel basis. The following dense layers use non-linear
adaptive re-calibration to extract discriminative chan-
nels with important features while also utilising con-
textual channel information. In order to create the
channel attention feature map Ch(I) as illustrated in
Fig. 4, the output of two dense layers is activated us-
ing the sigmoid function and multiplied with the input
(I). This is carried out to emphasise the characteristics
required for channel specific identification.
Similar to how the first portion of the parallel exci-
tation module squeezes the channels, the second half
of the module uses convolution blocks to capture the
common spatial features present in all channels. To
avoid losing important contextual features after con-
volution, we inserted a skip connection with the input
before proceeding to the sigmoid activation function.
Figure 4: The Parallel Excitation Module examines the im-
portant Spatial, Sp(I) and Channel, Ch(I) Information Sepa-
rately. The first half of the module uses convolution blocks
to capture the common spatial features present in all chan-
nels. The second half of the module includes a function
that squeezes the input tensor’s spatial plane using global
average pooling before stimulating it channel-wise to get
channel information.
The recovered features are spatially excited, and the
output is then multiplied by the input tensor to high-
light the crucial spatial data Sp(I). In contrast to (Woo
et al., 2018), where the spatial attention is carried out
via average and max pooling operation, the global
channel features are squeezed to extract salient spatial
information to provide spatial statistics by decreasing
the input through its channel dimension. Instead of
employing 1 × 1 convolution directly for the aggre-
gation of spatial information, another 3 × 3 convolu-
tion block is placed before it in order to aid in efficient
feature extraction. Finally in this case, along with spa-
cial, Sp(I) and channel, Ch(I) information the input is
also added utilising a skip connection to prevent the
loss of crucial discriminative information and to alle-
viate the vanishing gradient problems as shown in Fig.
4. Finally, we add the outputs of the BMFA module,
M(I) and PEM module, C(I) to obtain the output of
the SDAM module as shown in Fig. 2 (b).
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
320

3 EXPERIMENTAL RESULTS
AND DISCUSSIONS
3.1 Bridge Component Classification
Dataset
We have evaluated our algorithms and compared
them with the existing methods on the benchmark-
ing dataset for bridge component classification pro-
vided by the authors (Narazaki et al., 2017; Narazaki
et al., 2020; Narazaki et al., 2018), obtained for aca-
demic research and algorithmic evaluation compari-
son purposes. This dataset includes 1,563 bridge pho-
tos in a total of 320 × 320 pixel dimensions, out of
which 1329 images are used for training and the re-
maining 234 images are used for testing. Each im-
age is classified into one of five classes: Non-bridge,
Columns (including piers), Beams and Slabs, Other
Structural (trusses, arches, cables, abutments, extraor-
dinary braces, amazing bearings, etc.), and Other
Non-structural (fences, poles, etc.).
3.2 Implementation Details
In our DNNAM model, we employ a max pooling
method that summarises the average and most acti-
vated presences of several features. To filter noisy ac-
tivations in a lower layer of a convolution network,
pooling abstracts activations in a receptive field into
a single representative value. Spatial information
within a receptive field is lost during pooling, even
though it aids classification by maintaining only ro-
bust activations in upper layers. This information may
be crucial for the exact localisation needed for seman-
tic segmentation (Noh et al., 2015). We use unpooling
layers in our model, which reverse the pooling pro-
cess and reconstruct the initial size of activations, to
address this issue. This unpooling method is espe-
cially helpful for re-creating the input object’s struc-
ture.
The batch size for training methods is 16. Fol-
lowing earlier research (Narazaki et al., 2017), the
dataset has had random cropping, random flipping,
and random rotation applied in addition to the cen-
tre crop. Weighted Binary cross entropy loss is used
for training. Binary cross entropy is used to compare
each of the projected probabilities to the actual class
output, which can only be either 0 or 1. The score
that penalises the probabilities based on how far they
are from the predicted value is then calculated. This
shows the degree to which the value resembles the ac-
tual. The number of classes in the dataset, in this case,
5 is used as the rank value. The setting for the learn-
ing rate, α is 0.001. In order to improve the DNNAM
Figure 5: (a) Real image, (b) ground truth image and (c)
Predicted image with more than 80% pixel accuracy. Sim-
ply put, a non-bridge component class comprised more than
80% of the original image in this situation. As a result, more
than 80% of the pixels have been accurately identified. This
example is meant to demonstrate that high pixel accuracy
does not always imply superior segmentation skills.
model, the Adam optimizer is used for optimization
strategy with β
1
= 0.9 and β
2
= 0.999. The models
are trained using the Bridge component classification
dataset over 100 epochs. The experiments are carried
out on a system with an Intel(R) Core(TM) i7-9700
processor, 32 GB of RAM, and an NVIDIA GeForce
RTX-2080 8GB GPU card utilising the Python Keras
API and TensorFlow backend.
3.3 Performance Metrics
For comparison with the previous benchmarking
methods, we are using the following performance ma-
trices
3.3.1 Pixel Accuracy
The percentage of accurate pixel class prediction
compared to the ground truth is measured as pixel
accuracy (PA) over the test set. It is the proportion
of correctly classified pixels in our image. Now we
can take into account a situation that we encountered
throughout the project’s first stages to reveal the prob-
lems associated with this metric. Fig. 5 (a) and (b)
show the real image and the ground truth image, re-
spectively, that was given to the model. The model is
attempting to recognise or segment structural compo-
nents in the bridge image. Fig. 5 (c) depicts the pre-
diction with more than 80% accuracy. That means,
in this case, more than 80% of the original image be-
longed to one specific class (non-bridge component
class). Therefore, more than 80% of the pixels are
identified correctly, but the remaining 20% are inac-
curate if the model assigns all pixels to that class. Be-
cause of this, even though our accuracy is great, the
model is failing to accurately predict or identify the
structural components of the image.
The example in Fig. 5 is intended to show that ex-
cellent segmentation skills are not always implied by
great pixel accuracy. When our classes are severely
Deep Neural Network Based Attention Model for Structural Component Recognition
321

out of balance, one or more classes dominate the pic-
ture while other classes make up a very minor fraction
of it. Unfortunately, this can’t be disregarded because
it can be seen in many real world data sets. As a result,
we offer substitute metrics that are more effective in
addressing this problem.
3.3.2 Mean Intersection-over-Union
One of the most used metrics in semantic seg-
mentation is the intersection-over-union (IOU), of-
ten known as the Jaccard Index. The IOU is an ex-
ceedingly effective metric that is relatively simple to
use. The IOU can be defined as the area of union
between the predicted segmentation and the ground
truth divided by the area of overlap between the pre-
dicted segmentation and the ground truth. The mean
IOU (mIOU) of the picture is determined for binary
or multi-class segmentation by averaging the IOU of
each class, where IOU is given by equation 1 and is
calculated across each semantic class and then aver-
aged.
IOU =
T P
T P + FN + FP
(1)
Where T P, FN, and FP stand for true positives,
false negatives and false positives, respectively. These
terms are produced by comparing the actual labels
with those that were predicted.
Now, using the same example as pixel accuracy,
let’s try to see why this metric is superior. For sim-
plicity, let’s assume that all structural elements be-
long to the same class. Let’s compare the anticipated
segmentation to the actual or ground truths. At first,
we determine the IOU for the structural component.
We consider the image’s overall area to be 100 pixels,
which focuses on the overlap of the structural compo-
nents first. To check for overlapping component pix-
els, we can make the predicted segmentation on Fig. 5
(c) appear to be moved directly over the ground truth
on Fig. 5 (b). There are 0 overlapping structural com-
ponent pixels because the model does not identify any
pixels as structural components. The pixels from both
images that were classified as structural components
are included in the union, but not the overlapped or
intersected pixels. That is significantly less than the
80% pixel accuracy we predicted. It is evident that it
gives a far more realistic image of how well our seg-
mentation worked, though.
3.4 Comparison with Benchmarks
The performance of the suggested architecture com-
pared to other benchmarks is summarised in Table 1.
The results from earlier techniques (Narazaki et al.,
2017; Yeum et al., 2019) are expressed in terms of
Table 1: Comparison with Pre-existing Benchmarks on the
Bridge component classification dataset. We are consider-
ing mIOU as more important than PA, Perhaps because of
a lack of high-quality ground creation, mIOU is better than
PA on this dataset.
Benchmarking Works mIOU(%) PA(%)
CNPT - N
1
50.8 80.3
CPNT - Scene
1
- 82.4
FCN45
2
- 82.3
FCN45 - N
3
57.0 84.1
FCN45- P
3
56.9 84.1
FCN45- S
3
56.6 83.9
SegNet45- N
3
54.5 82.3
SegNet45 - P
3
55.2 82.9
SegNet45 - S
3
55.2 82.9
SegNet45-S - N
3
55.8 83.1
SegNet45-S - P
3
55.9 83.3
SegNet45-S - S
3
55.4 82.7
StructureNet
4
57.46 89.08
DNNAM 65.94 82.85
1
(Narazaki et al., 2017)
2
(Narazaki et al., 2020)
3
(Yeum
et al., 2019)
4
(Kaothalkar et al., 2022)
mean IOU (mIOU), and a comparison is made with
the most recent work by (Kaothalkar et al., 2022) and
(Narazaki et al., 2020), which takes into account both
mIOU and Pixel Accuracy (PA). Naive (N), Parallel
(P), and Sequential (S) models with various config-
urations are also compared in the (Narazaki et al.,
2020) paper.
The convergence curves produced during the
DNNAM network’s training are shown in Fig. 6. As
time goes on, we could see that both training and test-
ing, accuracy and mean IOU are steadily rising while
loss is decreasing. Our proposed DNNAM model
achieves a mean IOU of 65.94% with pixel wise ac-
curacy of 82.85%. Thus, when compared to all of
the previous research, our model surpasses them in
terms of mean IOU and also outperforms (Narazaki
et al., 2017; Narazaki et al., 2020; Yeum et al., 2019)
in terms of pixel wise accuracy for the prior work.
The inconsistent labelling of a few ground truths
on this dataset, also described in (Kaothalkar et al.,
2022), is a problem for performance saturation on
testing data. The average processing time of our de-
veloped model is 0.1001 seconds. Fig. 7 shows
the segmentation results of our proposed DNNAM
model on the Bridge Component Classification test
set. To create the attention maps that help explain the
proposed network’s decision-making process, sample
images from the dataset are applied to the DNNAM
architecture are shown in Fig. 8. These attention
maps assist the network to focus on these regions au-
tomatically by emphasising higher weightage on the
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
322
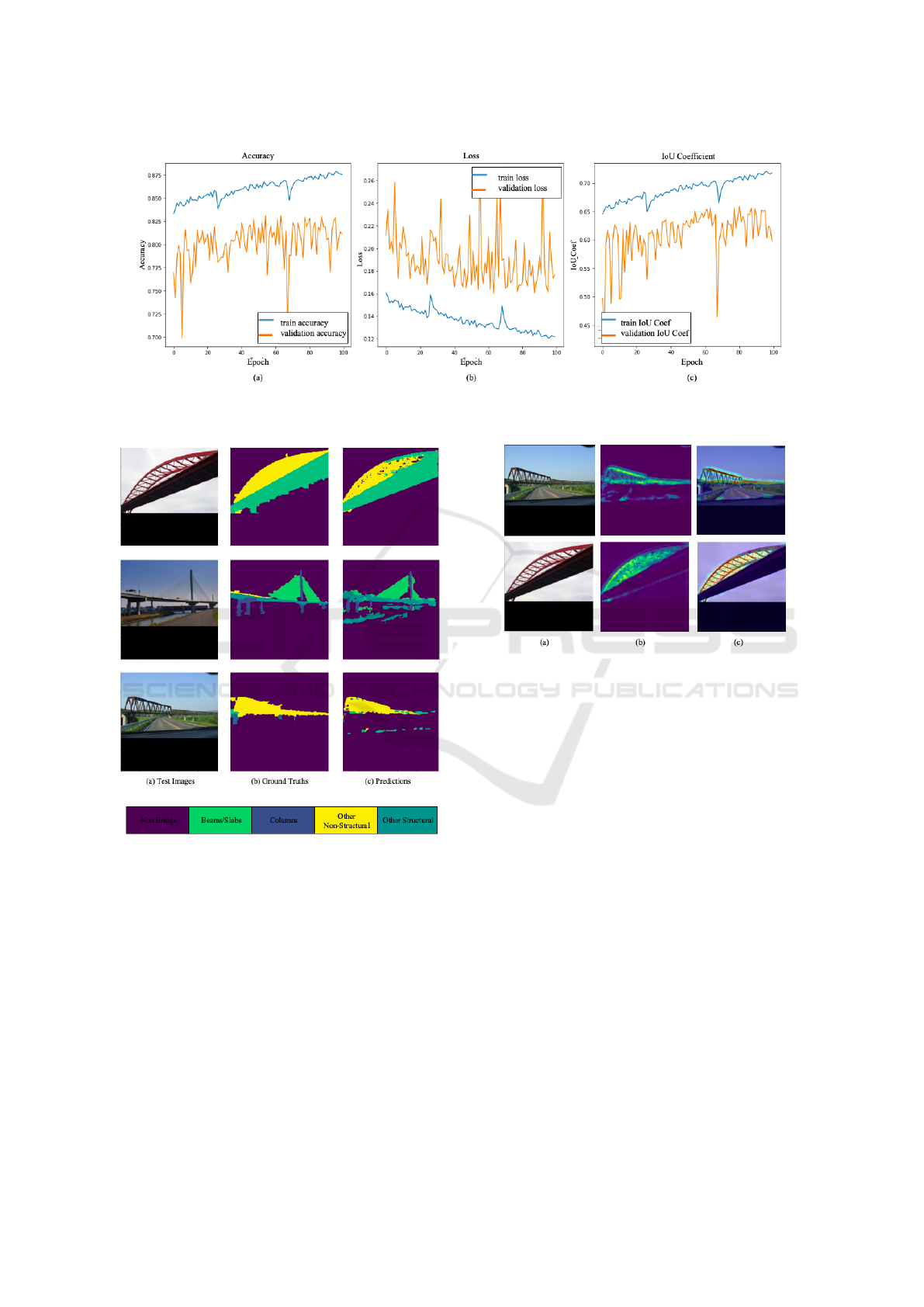
Figure 6: Performance curves generated during the training of the DNNAM network. Here blue and orange curves represent
training data and validation data accuracy over the epochs, respectively. (a) Accuracy (b) Loss and (c) IOU coefficient.
Figure 7: Segmentation results of our proposed DNNAM
model. Our proposed DNNAM model yields a mean IOU
of 65.94% with pixel wise accuracy of 82.85%.
structural component regions that help to extract ro-
bust discriminatory features for their classification.
The results are presented in terms of pixel accu-
racy on the ResNet23 model (mIOU score is taken
from (Narazaki et al., 2020)), with the naive com-
ponent classifier (CPNT - N) and component clas-
sifier with scene information (CPNT - Scene) being
proposed in the first benchmark on the dataset by
(Narazaki et al., 2017). The bridge component clas-
sification dataset uses the benchmark from another
study (Yeum et al., 2019). The majority of the re-
Figure 8: Attention maps obtained from the proposed
DNNAM network for sample images from the Bridge
component classification dataset. (a) Original images are
followed by their respective (b) attention maps and (c)
heatmaps are placed side-by-side.
sults come from the various approaches reported by
(Narazaki et al., 2020), among which FCN45-N re-
ports the best mIOU of 57.0% and the best pixel
accuracy of 84.1%. If we observe the comparison
with pre-existing benchmark’s Table 1, we could see
most of Narazaki’s work yielded an average of 55%
in terms of Mean IOU values. Narazaki’s earlier
work is outperformed by recent work by (Kaothalkar
et al., 2022), which has the mIOU (57.46%) and best
pixel accuracy (89.08%) values. Mean IOU is con-
sidered the best performance metric and our proposed
DNNAM model got mIOU (65.94%). Thus our pro-
posed model DNNAM, in terms of mIOU performs
8.48% better than the previously established highest
values. Also, we could notice that all the benchmark-
ing works are generating pixel accuracy greater than
80% and our model also keeps that margin in the ex-
perimental results with 82.85% PA.
As we explained in the previous section perfor-
mance metrics, there are certain disadvantages to util-
Deep Neural Network Based Attention Model for Structural Component Recognition
323
Table 2: Assessment of DNNAM on Semantic Augmented
Make3D dataset when compared with the baseline model.
Assessment mIOU (%) PA (%)
Make3D-S (Liu et al., 2010)
Baseline ResNet-50 65.83 88.42
DNNAM 73.42 87.47
ising the performance metric pixel accuracy, hence in
our study, we are emphasising on the performance
metric mean IOU. In the early stages of our experi-
mental tests, we found that while running the model
for a few additional epochs allowed us to attain pixel
accuracy that was higher than that of the previous
works, the model was unable to correctly anticipate or
identify the structural elements of the image. Through
our analysis and studies finally, we are able to estab-
lish that when the synchronous dual attention module
and residual modules are combined as we proposed,
it can capture long-range dependencies in the feature
maps, improving the architecture’s efficiency and ac-
curacy.
Assessment on Semantic Augmented Make3D
Dataset: We evaluate the model’s performance
on an additional dataset, the Semantic Augmented
Make3D (Liu et al., 2010; Saxena et al., 2005; Sax-
ena et al., 2008) dataset, acquired for research and
comparison evaluation purposes. 400 training images
and 134 evaluation images from 8 separate classes
make up the Make3D-S dataset. Each image has an
input resolution of 240 × 320. This dataset is cho-
sen since it contains outdoor images of various types
of buildings and structures. The evaluation is sum-
marised in Table 2, which demonstrates that our sug-
gested DNNAM outperforms the backbone architec-
ture (ResNet-50) for the Make3D-S dataset and can be
used for the semantic segmentation task as well. Due
to the inclusion of residual module and contextual
level information encoding across spatial and chan-
nel dimensions, which provides more fine-tuned fea-
ture extraction and hence improves the metric values,
results in Table 2 show superior results for the addi-
tional dataset as well.
4 ABLATION STUDIES
To demonstrate the effectiveness of the fusion of syn-
chronous dual attention modules (SDAM) and resid-
ual modules, a series of ablation study experiments
are conducted. In the first case, the SDAM module
is eliminated and observed the results without an at-
tention mechanism. To achieve better outcomes in the
second case, we exclusively use residual modules and
vary the number of residual modules as well. The re-
sults are summarised in Tables 3 and 4. It should be
emphasised that when utilised separately, each mod-
ule does not produce the best results; only when they
are combined do they perform significantly better at
making predictions.
4.1 Ablation Experiments on SDAM
Module
With a thorough ablation investigation, we assess
many aspects of SDAM and report the findings on
the structural component dataset (Narazaki et al.,
2017; Narazaki et al., 2020; Narazaki et al., 2018;
Kaothalkar et al., 2022). Firstly, we train the network
by retaining just residual modules, i.e., by omitting
the primary core synchronous dual attention module.
The lack of an attentive feature extraction process
in this case results in a performance drop. Due to
substantial changes and the presence of overlapped
structural components, which might have been ade-
quately distinguished by utilising the complete atten-
tion mechanism, we can notice lower performance on
the structural component dataset.
Secondly, we attempt to evaluate the significance
of various attention processes included in the pro-
posed architecture. The parallel excitation module
(PEM) is taken out while all the remaining modules
are kept in order to investigate this. Due to the lack
of a spatial-channel attention mechanism to encode
discrete structural components, experimental results
in Table 3 show a decline in performance for recog-
nizing the structural components. The same opera-
tion is then repeated while omitting all of the batch of
multi-feature attention module (BMFA), demonstrat-
ing that the structural component dataset has lower
accuracy because it lacks the highly localised fea-
ture selection that is necessary to distinguish between
structural components that overlap and have similar
appearances.
Thirdly, while leaving the other modules in place,
we take off one of the parallel excitation module sub-
channel networks and spatial attention components at
a time to examine the effects of specific attention op-
erations on recognition performance. Table 3 shows
the structural component recognition performance by
removing one of the attention sub-networks, which
shows a reduced performance in both scenarios and
further reinforces the need for using both channel and
spatial attention components.
Finally, we double the quantity of SDAM mod-
ules to track any performance changes. Similar per-
formance is shown by the testing results, but a sin-
gle SDAM module near the core produced better re-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
324
Table 3: Ablation experiments on synchronous dual atten-
tion module. This study demonstrates decreasing perfor-
mances for each of these scenarios in both performance pa-
rameters (mIOU and PA), emphasising the importance of
the proposed architecture design’s performance.
Model Description mIOU(%) PA(%)
DNNAM without
SDAM
59.59 80.10
Residual Module + Only
BMFA
63.35 81.63
Residual Module + Only
PEM
51.08 80.35
Only Spatial attention in
PEM
59.24 78.66
Only Channel attention
in PEM
58.03 79.08
BMFA with only 2 lay-
ers
61.76 81.31
BMFA with 4 layers 61.41 79.68
DNNAM with 2 SDAM 48.07 74.73
Self attention replacing
BMFA
61.06 80.61
Self attention replacing
PEM
38.55 80.23
Self attention replacing
SDAM
61.12 80.14
DNNAM 65.94 82.85
Table 4: Ablation experiments on the residual module. This
study shows decreased performances for each of these sce-
narios in performance parameters (mIOU and PA), further
highlighting the significance of the performance of the pro-
posed architectural design.
Model Description mIOU(%) PA(%)
DNNAM without Resid-
ual Module
58.41 77.85
Only 1 Residual Module 56.86 78.41
Using 2 Residual Mod-
ule
60.08 78.59
Using 4 Residual Mod-
ule
62.30 79.52
DNNAM 65.94 82.85
sults with minimal running times. Table 3 shows
decreased performances for each of these scenarios,
further highlighting the significance of the proposed
modules.
4.2 Ablation Experiments on Residual
Module
We conduct a broad range of experiments on the
residual module to assess the impact of various
changes and the results are summarised in Table 4.
Firstly, the proposed network is trained using only
the synchronous dual attention modules and not
any residual modules, which use fewer parameters.
However, as seen in Table 4, the classification perfor-
mance suffers when the residual module is absent.
A deeper network results from the extraction of
local features across all channels with the assistance
of residual modules. To capture multi-scale fea-
ture representation, each residual block combines
features from all prior responses. It demonstrates
the effectiveness of a deeper network, such as a
residual module, in obtaining reliable features for the
identification of overlapping structural components.
Moreover, these networks emphasise accurate spatial
feature estimation.
Additionally, the network can alleviate the vanish-
ing gradient problem with generalised performance
owing to the identity mappings across the residual
units. These traits of the residual module contribute to
the structural component dataset’s increased perfor-
mance. Furthermore, we tested altering the number
of residual modules in the design to see how perfor-
mance changed and discovered that keeping 3 will re-
sult in the optimal performance matrices with the least
amount of running time. We obtain decreased results
in Table 4 for each of these scenarios, further high-
lighting the significance of the proposed modules.
5 CONCLUSION AND FUTURE
WORK
In this work, we address the challenges involved in
structural component recognition, a crucial step in the
inspection process and management of civil infras-
tructures. To improve classification performance with
fewer parameters, our proposed DNNAM architecture
is built using synchronous dual attention modules and
residual modules, which are used to extract robust
salient discriminative features from multiple scales.
Numerous experimental results and ablation studies
on benchmarking datasets demonstrate the superiority
of the proposed DNNAM architecture as compared
to other current state-of-the-art approaches, particu-
larly in terms of the performance metric mean IOU
for multi-target and multi-class classification prob-
lems. The classification of additional kinds of struc-
tural components may benefit from the success of the
proposed DNNAM architecture.
The structural component recognition studied in
this research is a crucial building block for au-
tonomous robot navigation in post-earthquake/natural
or other calamity disaster affected areas. The pro-
Deep Neural Network Based Attention Model for Structural Component Recognition
325

posed DNNAM system can be used in conjunction
with unmanned aerial vehicles (UAVs) to quickly
identify structural elements and can accurately detect
deterioration, anticipate how long a structure will last
and monitor large concrete structures.
REFERENCES
Bhattacharya, G., Puhan, N. B., and Mandal, B. (2021).
Stand-alone composite attention network for concrete
structural defect classification. IEEE Transactions on
Artificial Intelligence, 3(2):265–274.
Cordonnier, J.-B., Loukas, A., and Jaggi, M. (2019). On the
relationship between self-attention and convolutional
layers. arXiv preprint arXiv:1911.03584.
Gao, Y. and Mosalam, K. M. (2018). Deep transfer learn-
ing for image-based structural damage recognition.
Computer-Aided Civil and Infrastructure Engineer-
ing, 33(9):748–768.
Guo, H., Zheng, K., Fan, X., Yu, H., and Wang, S. (2019).
Visual attention consistency under image transforms
for multi-label image classification. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 729–739.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hu, J., Shen, L., and Sun, G. (2018). Squeeze-and-
excitation networks. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 7132–7141.
Kaothalkar, A., Mandal, B., and Puhan, N. B. (2022). Struc-
turenet: Deep context attention learning for structural
component recognition. In Farinella, G. M., Radeva,
P., and Bouatouch, K., editors, Proceedings of the 17th
International Joint Conference on Computer Vision,
pages 567–573. SCITEPRESS.
Liang, X. (2019). Image-based post-disaster inspection of
reinforced concrete bridge systems using deep learn-
ing with bayesian optimization. Computer-Aided Civil
and Infrastructure Engineering, 34(5):415–430.
Liu, B., Gould, S., and Koller, D. (2010). Single im-
age depth estimation from predicted semantic labels.
In 2010 IEEE computer society conference on com-
puter vision and pattern recognition, pages 1253–
1260. IEEE.
Narazaki, Y., Hoskere, V., Hoang, T. A., Fujino, Y., Sakurai,
A., and Spencer Jr, B. F. (2020). Vision-based auto-
mated bridge component recognition with high-level
scene consistency. Computer-Aided Civil and Infras-
tructure Engineering, 35(5):465–482.
Narazaki, Y., Hoskere, V., Hoang, T. A., and Spencer, B. F.
(2017). Vision-based automated bridge component
recognition integrated with high-level scene under-
standing. arXiv preprint arXiv:1805.06041.
Narazaki, Y., Hoskere, V., Hoang, T. A., and Spencer Jr,
B. F. (2018). Automated vision-based bridge compo-
nent extraction using multiscale convolutional neural
networks. arXiv preprint arXiv:1805.06042.
Noh, H., Hong, S., and Han, B. (2015). Learning de-
convolution network for semantic segmentation. In
Proceedings of the IEEE international conference on
computer vision, pages 1520–1528.
Park, J., Woo, S., Lee, J.-Y., and Kweon, I. S. (2018).
Bam: Bottleneck attention module. arXiv preprint
arXiv:1807.06514.
Saxena, A., Chung, S., and Ng, A. (2005). Learning depth
from single monocular images. Advances in neural
information processing systems, 18.
Saxena, A., Sun, M., and Ng, A. Y. (2008). Make3d: Learn-
ing 3d scene structure from a single still image. IEEE
transactions on pattern analysis and machine intelli-
gence, 31(5):824–840.
Spencer, B. F., Hoskere, V., and Narazaki, Y. (2019). Ad-
vances in computer vision-based civil infrastructure
inspection and monitoring. Engineering, 5(2):199–
222.
Tan, Z., Yang, Y., Wan, J., Hang, H., Guo, G., and Li, S. Z.
(2019). Attention-based pedestrian attribute analysis.
IEEE transactions on image processing, 28(12):6126–
6140.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. Advances in neural
information processing systems, 30.
Wang, F., Jiang, M., Qian, C., Yang, S., Li, C., Zhang, H.,
Wang, X., and Tang, X. (2017). Residual attention
network for image classification. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 3156–3164.
Wang, W. and Shen, J. (2017). Deep visual attention pre-
diction. IEEE Transactions on Image Processing,
27(5):2368–2378.
Woo, S., Park, J., Lee, J.-Y., and Kweon, I. S. (2018). Cbam:
Convolutional block attention module. In Proceed-
ings of the European conference on computer vision
(ECCV), pages 3–19.
Yeum, C. M., Choi, J., and Dyke, S. J. (2019). Automated
region-of-interest localization and classification for
vision-based visual assessment of civil infrastructure.
Structural Health Monitoring, 18(3):675–689.
Zhang, F., Chen, Y., Li, Z., Hong, Z., Liu, J., Ma, F., Han, J.,
and Ding, E. (2019). Acfnet: Attentional class feature
network for semantic segmentation. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision, pages 6798–6807.
Zhou, S., Wang, J., Zhang, J., Wang, L., Huang, D., Du, S.,
and Zheng, N. (2020). Hierarchical u-shape attention
network for salient object detection. IEEE Transac-
tions on Image Processing, 29:8417–8428.
Zhu, Y., Zhao, C., Guo, H., Wang, J., Zhao, X., and Lu,
H. (2018). Attention couplenet: Fully convolutional
attention coupling network for object detection. IEEE
Transactions on Image Processing, 28(1):113–126.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
326
