PanDepth: Joint Panoptic Segmentation and Depth Completion
Juan Pablo Lagos and Esa Rahtu
a
Tampere University, Tampere, Finland
fi
Keywords:
Panoptic Segmentation, Instance Segmentation, Semantic Segmentation, Depth Completion, CNN,
Multi-Task Learning.
Abstract:
Understanding 3D environments semantically is pivotal in autonomous driving applications where multiple
computer vision tasks are involved. Multi-task models provide different types of outputs for a given scene,
yielding a more holistic representation while keeping the computational cost low. We propose a multi-task
model for panoptic segmentation and depth completion using RGB images and sparse depth maps. Our model
successfully predicts fully dense depth maps and performs semantic segmentation, instance segmentation, and
panoptic segmentation for every input frame. Extensive experiments were done on the Virtual KITTI 2 dataset
and we demonstrate that our model solves multiple tasks, without a significant increase in computational cost,
while keeping high accuracy performance. Code is available at https://github.com/juanb09111/PanDepth.git.
1 INTRODUCTION
Producing a holistic representation of a given scene
has become essential in computer vision. The tradi-
tional tasks and challenges, such as semantic segmen-
tation, instance segmentation, pose estimation, edge
estimation, or depth completion only provide a lim-
ited representation that alone are not enough to suc-
cessfully complete more complex tasks, for instance,
autonomous driving, where, in addition to estimating
the distance of the objects and stuff on and around
the road, it is also essential to understand the seman-
tic context of the scene, that is, identifying the type of
objects around, e.g. cars, pedestrians, road lanes, traf-
fic signs, at the same time as the depth to such objects
is estimated. This raises the need for multi-task mod-
els that are capable of solving several tasks in parallel
while keeping the computational cost low.
This work is inspired by the idea of devising
a model that combines panoptic segmentation and
depth completion which is of high relevance in ap-
plications such as autonomous driving where under-
standing 3D environments semantically is pivotal for
the performance of autonomous machines. We ex-
plore the hypothesis that panoptic segmentation and
depth completion can use cues from one another,
more explicitly, that there are depth features that con-
tain relevant semantic cues as well there are seman-
tic segmentation features that contain relevant depth
a
https://orcid.org/0000-0001-8767-0864
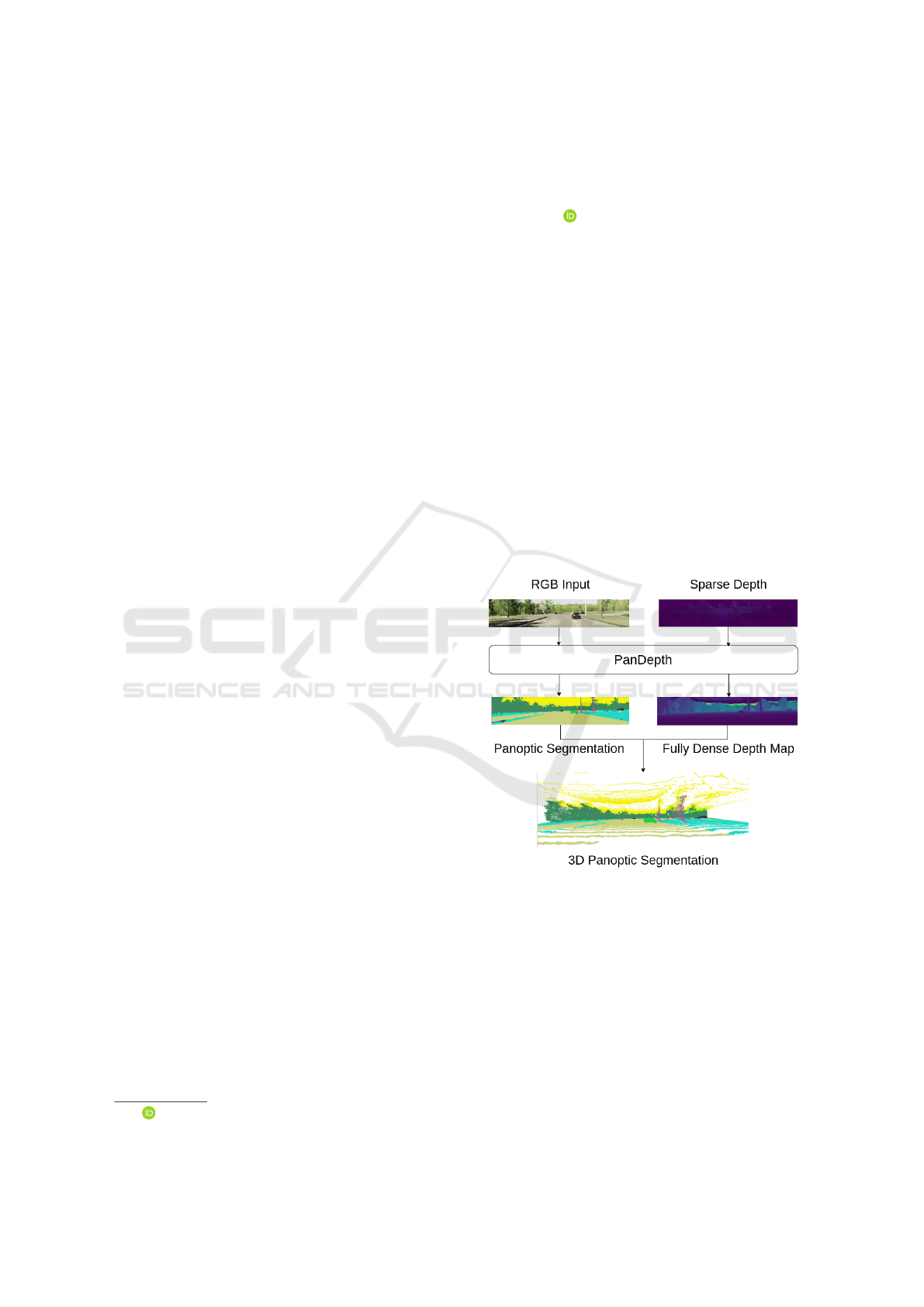
Figure 1: The proposed model (PanDepth) takes RGB im-
ages and sparse depth and returns the corresponding panop-
tic segmentation and fully dense depth map with which we
create a 3D panoptic segmentation representation of the in-
put frame.
cues.
Multi-task networks, not only reduce the demand
for computational resources, as compared to running
multiple single-task networks but also, there is em-
pirical evidence that multi-task networks can perform
better in each individual task by jointly learning fea-
tures from all tasks involved (Ruder, 2017; Sener and
Koltun, 2018; Lagos and Rahtu, 2022). For instance,
Lagos, J. and Rahtu, E.
PanDepth: Joint Panoptic Segmentation and Depth Completion.
DOI: 10.5220/0011685200003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
635-643
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
635

depth features can be helpful for performing seman-
tic segmentation and vice-versa. Even in applications
where solving a single task is the primary goal, in-
troducing features from other tasks may leverage ac-
curacy and performance. Such paradigm is known
as auxiliary tasks (Liebel and K
¨
orner, 2018a; Li and
Dong, 2021), whereby solving other tasks it is possi-
ble to obtain relevant features which lead to a better
performance in the main task.
We focus on solving three tasks in a joint manner,
namely, semantic segmentation, instance segmenta-
tion, and depth completion using convolutional neu-
ral networks (CNNs). Combining semantic segmen-
tation and instance segmentation into one single rep-
resentation is known as panoptic segmentation (Kir-
illov et al., 2018). It provides a representation of an
image where not only every pixel is assigned a label
from a list of predefined labels, as in the case of se-
mantic segmentation, but also, objects are detected as
instances of a specific class, thus providing valuable
information, such as the number of cars, people, or
objects of a certain kind that are found in the image,
as well as the semantic context of the non-countable
stuff in the scene. Countable and non-countable ob-
jects are usually referred to as ”things” and ”stuff” in
the context of computer vision (Adelson, 2001).
While semantic segmentation produces a single
output, pixel-wise classification, instance segmenta-
tion produces three different outputs: bounding boxes
for the objects detected, a label for each bounding
box, and a segmentation mask for each object de-
tected. The outputs of both tasks, semantic segmen-
tation, and instance segmentation, are usually fused
using heuristic methods with no learnable parameters
(Mohan and Valada, 2020; Xiong et al., 2019).
On the other hand, depth completion aims to pro-
duce a dense depth map from sparse depth points
which cover only a few pixels from a given image.
Sparse depth maps can be obtained with active depth
sensors, such as lidars. When 3D points obtained with
lidars are projected onto an image, only about 5% of
the image is covered (Uhrig et al., 2017). The goal is
then to produce a dense depth map, with depth values
for all the pixels in the image, given a sparse depth
map as input.
In this paper, we propose an end-to-end model
for panoptic segmentation and depth completion us-
ing joint training in order to provide a more holis-
tic representation of the input images. In contrast
with other works where predictions are made based
on RGB images only (Gao et al., 2022; Schon et al.,
2021; Yuan et al., 2021), our model processes hetero-
geneous data jointly, that is, RGB images and sparse
depth maps as shown in Figure 1. For most machine
perception applications, active depth sensors are part
of the setup, for which we consider it more relevant
to integrate both RGB images as well as sparse depth
maps. We also quantify the effects of joint train-
ing as compared to training every task individually,
thus providing more data on the growing evidence of
the advantages of multi-task networks. We conduct
extensive experiments on Virtual KITTI 2 (Cabon
et al., 2020), which is a relevant dataset in the con-
text of autonomous driving that contains ground truth
annotations for instance segmentation, semantic seg-
mentation and ground truth depth maps available for
the entire dataset. Although panoptic segmentation
ground truth is not directly provided by Virtual KITTI
2 dataset, we use semantic and instance segmentation
ground truth to generate panoptic segmentation anno-
tations.
2 RELATED WORKS
2.1 Panoptic Segmentation
Early works in computer vision developed CNN ar-
chitectures for performing semantic segmentation and
instance segmentation independently with reasonable
success (Long et al., 2014; Ronneberger et al., 2015;
He et al., 2017). Later on, Kirillov et al. (2018) pro-
posed a task that would combine both tasks into one,
which they named panoptic segmentation. Kirillov
et al. (2018) also defined a metric for assessing the
performance of panoptic segmentation predictions re-
ferred to as panoptic quality (PQ), thus, providing a
complete definition of the problem of panoptic seg-
mentation with a target metric for performance com-
parison. Such a robust definition of the task called the
attention of the community, leading to the first archi-
tectures for end-to-end panoptic segmentation using
CNNs (Li et al., 2018; Hou et al., 2019; Cheng et al.,
2019; Xiong et al., 2019; Liu et al., 2019; de Geus
et al., 2019; Kirillov et al., 2019; Petrovai and Nede-
vschi, 2019).
The most common challenges that appeared with
panoptic segmentation are how to optimize a shared
feature extractor as well as how to combine seman-
tic segmentation and instance segmentation predic-
tions while keeping the computational cost low. Mo-
han and Valada (2020) proposed a model for panoptic
segmentation which consists of two heads, namely,
semantic segmentation and instance segmentation, a
fusion module for combining the outputs of both
heads, and a feature extractor based on a family of
scalable CNNs known as EfficientNet (Tan and Le,
2019), where the resolution, depth, and width are
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
636

balanced depending on the computational resources
available. For multi-scale features, Mohan and Val-
ada (2020) wrap the feature extractor into a two-way
feature pyramid network (FPN). Similarly, Chen et al.
(2020a) used the same concept of scalable networks to
Residual Networks (ResNets) for performing panop-
tic segmentation.
Other approaches (Wang et al., 2020; Carion et al.,
2020; Zhu et al., 2020; Cheng et al., 2021b; Li et al.,
2021; Cheng et al., 2021a) have adopted transform-
ers architecture (Vaswani et al., 2017), initially de-
signed for text processing and sequence transduction,
and integrated attention mechanisms for panoptic seg-
mentation. In contrast with more traditional methods,
with instance segmentation and semantic segmenta-
tion defined as sub-tasks, transformer-based models
use queries to represent ”things” and ”stuff” classes
and perform panoptic segmentation.
2.2 Depth Completion
The task of depth completion aims to transform a
sparse depth map, usually obtained with active depth
sensors e.g. Lidar, into a dense depth map. Lidar
devices can only provide a limited amount of depth
points when projected onto the corresponding image,
raising the need for methods that can lead to a fully-
dense representation of the depth of an entire image.
Several works have used RGB images as guidance for
depth completion (Qiu et al., 2018; Eldesokey et al.,
2018; Gansbeke et al., 2019; Tang et al., 2019; Yang
et al., 2019; Park et al., 2020; Hu et al., 2021). Jaritz
et al. (2018) proposed an encoder-decoder network ar-
chitecture for depth completion, based on a late fusion
of RGB images and sparse depth maps. However,
processing RGB and Lidar data is not trivial, since,
in contrast to RGB images, sparse depth data lacks a
natural grid structure unless projected onto a 2D space
which also facilitates the usage of traditional 2D con-
volutional layers.
Nonetheless, when mapping 3D data to 2D, valu-
able information regarding the geometrical relation-
ship among the points in the 3D space is lost. Chen
et al. (2020b) introduced a fuse block that exploits 3D
cues by using parametric continuous convolution lay-
ers (Wang et al., 2018) while using 2D convolutions
for processing RGB and later fusing the correspond-
ing features in 2D space. Such 2D-3D fuse method
is an essential building block in the proposed model,
in which, with slight modifications to the model pro-
posed by Chen et al. (2020b), we successfully map
sparse depth maps to dense depth maps.
2.3 Multi Task Learning
CNNs can benefit from performing multiple tasks, as
opposed to single-task networks. Branched CNNs
consist of shared layers as well as task-specific lay-
ers, also known as branches. When such CNNs are
trained, the weights of the shared layers are adjusted
via back-propagation from each one of the branches,
each one of which has one or multiple loss func-
tions defined. In turn, the shared layers learn rele-
vant features for all tasks, and such features are then
fed to every branch. That allows for a very distinctive
flow of information between the different branches.
There is increasing evidence that single tasks, benefit
when models are trained jointly improving the perfor-
mance of each one of the tasks tackled by the network
(Liebel and K
¨
orner, 2018b; Liu et al., 2018; Liebel
and K
¨
orner, 2019; Zou et al., 2020a; Guo et al., 2020).
While some multi-task networks have addressed
tasks relatively similar e.g. instance segmentation
and semantic segmentation, other works have com-
bined semantic segmentation and depth completion as
end-to-end models (Hazirbas et al., 2016; Zou et al.,
2020b; He et al., 2021). Lagos and Rahtu (2022)
proposed a combined model for semantic segmen-
tation and depth completion using RGB images and
sparse depth maps, where it is demonstrated quantita-
tively and visually how each task outperforms equiv-
alent single-task models for semantic segmentation
and depth completion trained independently. Our
model performs depth completion, instance segmen-
tation, and semantic segmentation. We fuse instance
and semantic segmentation to obtain a panoptic seg-
mentation representation. In contrast with other meth-
ods, our model processes heterogeneous data, more
specifically RGB images, and sparse depth maps us-
ing a stack of 2D-3D fuse blocks as proposed by Chen
et al. (2020b)
3 ARCHITECTURE
3.1 Overview
The proposed model performs panoptic segmenta-
tion and depth completion in an end-to-end man-
ner. It consists of a two-way feature pyramid net-
work (FPN) as a shared feature extractor, three task-
specific branches, one for each task (semantic seg-
mentation, instance segmentation, and depth comple-
tion), one joint branch that refines the semantic log-
its using the resulting depth maps as guidance, and
one final block for combining semantic and instance
logits based on the fusion block proposed by Mohan
PanDepth: Joint Panoptic Segmentation and Depth Completion
637
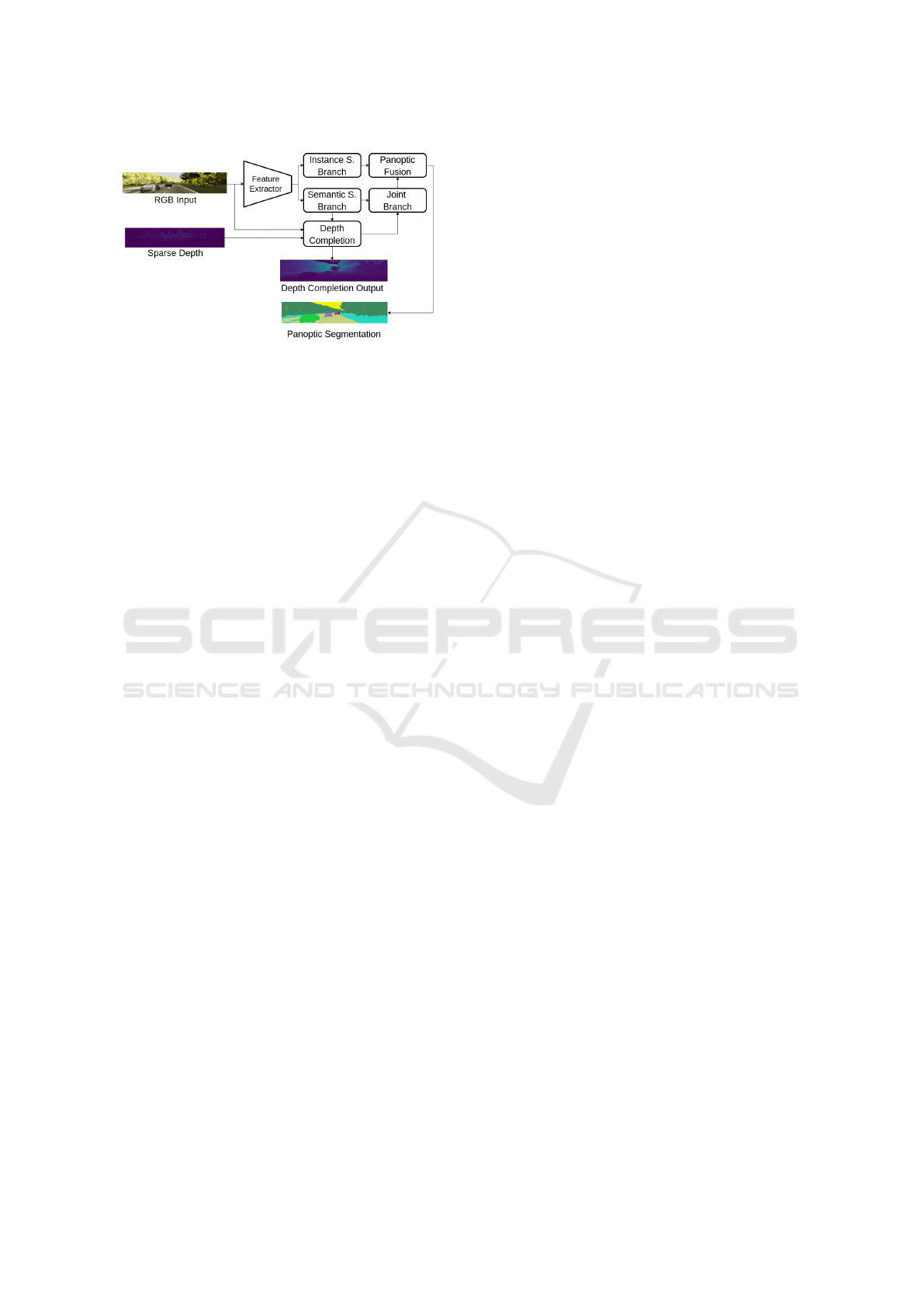
Figure 2: Overview of the proposed PanDepth architec-
ture. Given an RGB image and sparse depth map as input,
our model outputs the corresponding dense depth map and
panoptic segmentation.
and Valada (2020). The inputs to our model are RGB
images and sparse depth maps and the output is the
corresponding panoptic segmentation representations
and fully dense depth maps. The panoptic segmenta-
tion output and the resulting depth maps can be fur-
ther combined to produce a 3D panoptic segmentation
representation as shown in Figure 1.
3.2 Backbone
The backbone consists of a two-way FPN with an
EfficientNet-B5 (Tan and Le, 2019) at the core, as
shown in Figure 3. On one hand, the FPN upsam-
ples lower resolution features and adds them together.
On the other hand, the FPN downsamples higher-
resolution features and adds them together. This al-
lows for multi-scale feature extraction. The backbone
returns feature maps at four different scales, down-
scaled by a factor of ×4, ×8, ×16, and ×32 with re-
spect to the spatial resolution at the input.
3.3 Semantic Segmentation Branch
The semantic segmentation branch is a light-weighted
structure that consists of three main building blocks
based on the model proposed by Mohan and Val-
ada (2020). Firstly, a Large Scale Feature Extractor
(LSFE) extracts localized fine features. Secondly, a
small-scale feature extractor based on Dense Predic-
tions Cells (DPC), and finally, a Mismatch Correction
Module (MC) is used in order to properly aggregate
features at different scales. The input to this branch
consists of the four feature maps returned by the back-
bone, they are in four different scales, ×4, ×8, ×16,
and ×32. The tensors returned by the LSFE and DPC
modules are aggregated as shown in Figure 3. Finally,
this branch returns preliminary semantic segmenta-
tion logits of size nc × H ×W, where nc is the total
number of classes and H ×W refers to the spatial res-
olution of the input height × width respectively. At
a later stage, the preliminary semantic segmentation
logits are refined with depth maps as guidance in the
joint branch.
3.4 Instance Segmentation Branch
The instance segmentation branch is a lighter ver-
sion of Mask R-CNN (He et al., 2017). Following
the modifications suggested by Mohan and Valada
(2020), all the convolutions were replaced by depth-
wise separable convolutions (Chollet, 2016), batch
normalization layers were replaced by synchronized
Inplace Activated Batch Normalization layers (iABN)
(Bul
`
o et al., 2017) and the ReLU activations were re-
placed by Leaky ReLU.
Similar to Mask R-CNN, the instance segmenta-
tion branch consists of two stages. In the first stage, a
region proposal network (RPN) returns a set of rectan-
gular regions with a corresponding objectness score.
Thereafter, a RoIAlign module extracts small feature
maps of size 7 × 7 from the regions returned by the
RPN. Subsequently, those features are used as input
to two sub-branches that run in parallel, one of which
regresses bounding boxes and classifies the objects of
each corresponding box, and another sub-branch that
regresses the corresponding masks returning an out-
put tensor of size NI ×28 ×28, where NI corresponds
to the number of instances detected.
3.5 Depth Completion Branch
This branch processes frame by frame and takes three
different input types. Firstly, a sparse depth map orig-
inated from a 3D to 2D projection of a point cloud.
Secondly, the corresponding RGB frame, and thirdly
a preliminary semantic segmentation map as shown
in Figure 3. Our depth completion branch is based
on the architecture proposed by Chen et al. (2020c),
upon which we made modifications in order to use
preliminary semantic segmentation maps as proposed
by Lagos and Rahtu (2022). At the input level, the
sparse depth map is passed through two 2D convo-
lutional layers of kernel size 3 × 3, while the RGB
image and the semantic segmentation map are con-
catenated and passed through two 2D convolutional
layers of kernel size 3× 3. Subsequently, the two cor-
responding outputs are concatenated and, along with
the original sparse depth map, they serve as input to
a stack of N 2D − 3D Fuse Blocks. Finally, the re-
sulting tensor from the Fuse Blocks passes through
two 2D convolutional layers of kernel size 3 × 3 for
refinement, yielding the final fully dense depth map.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
638
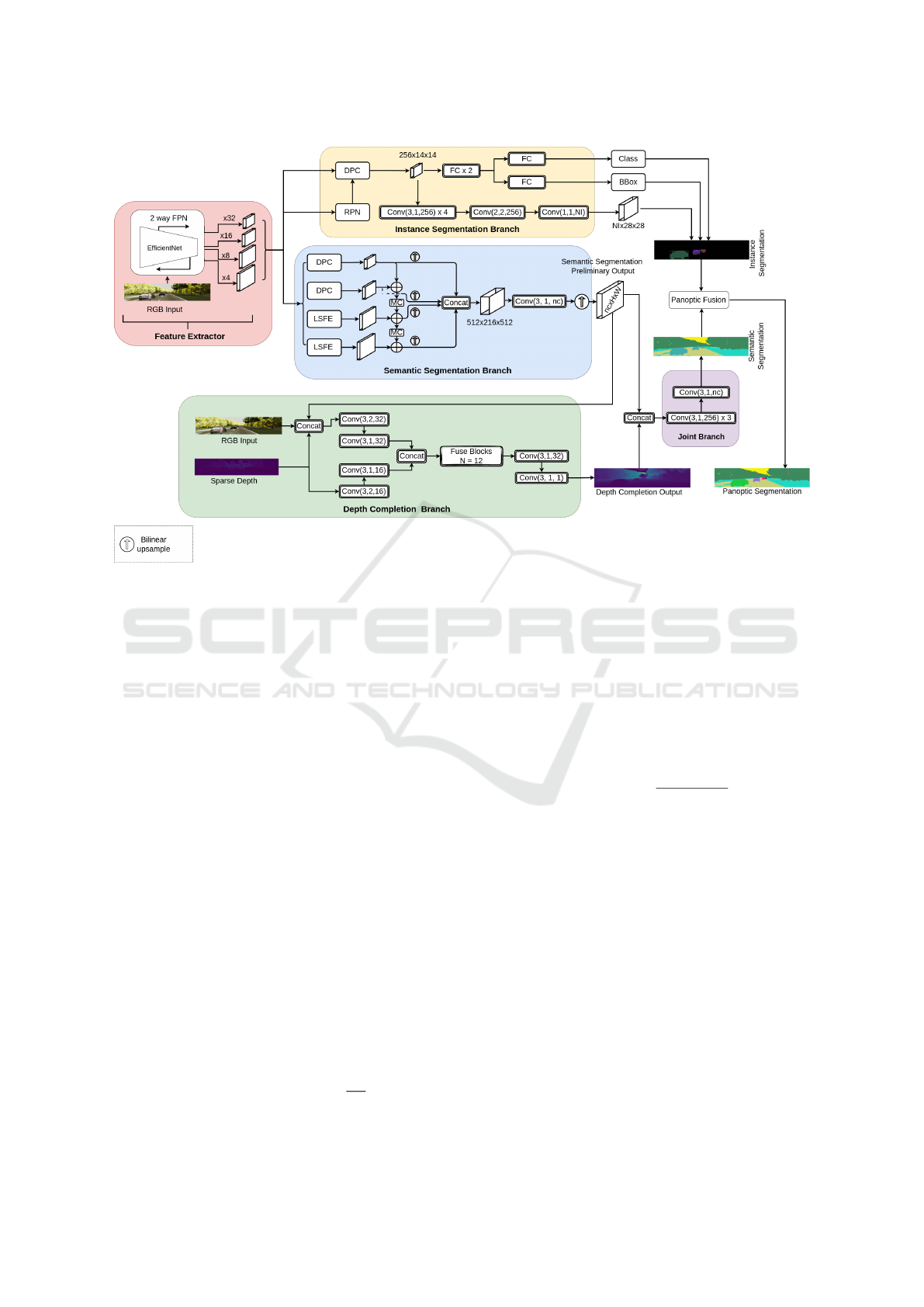
Figure 3: PanDepth architecture. Our model consists of a feature extractor, three task-specific branches (i.e. instance segmen-
tation, semantic segmentation, and depth completion), a joint branch, and a panoptic fusion module. The convolutional layers
in this diagram follow the notation Conv(k,s,c) ×n representing a stack of n convolutional layers where k refers to a kernel of
size k × k, s is the stride, c is the number of output feature channels, and FC represents a fully connected layer.
3.6 Joint Branch
We use the depth completion output as guidance for
refining the semantic segmentation preliminary out-
put. This branch, albeit simple, successfully leverages
the performance of the semantic segmentation task.
It consists of four stacked 2D convolutions of kernel
size 3 × 3. The input to this branch is the concate-
nation of the output of the depth completion branch,
that is, a fully dense depth map, and the preliminary
semantic segmentation output. Finally, this branch re-
turns a tensor of size nc×H ×W , where nc is the total
number of classes in the dataset, H and W correspond
to the original height and width of the model’s input
respectively.
3.7 Loss Functions
Semantic Segmentation. We used the weighted
per-pixel log-loss for semantic segmentation. It is de-
fined as follows:
L
semantic
= −
∑
i
w
i
p
i
log ˆp
i
, (1)
where i is the pixel index, w
i
=
4
W H
if pixel i is
within the 25% worst predictions, w
i
= 0 otherwise.
W and H correspond to the width and height of the in-
put image respectively, p
i
and ˆp
i
are the ground truth
and the predicted probability for pixel i of belonging
to class label c ∈ p respectively. The predicted prob-
ability ˆp
i
is computed using the Softmax function de-
fined as:
So f tmax(x
n
) =
exp(x
n
)
∑
m
exp(x
m
)
. (2)
Instance Segmentation. We adopted the loss func-
tions for instance segmentation as defined in Mask R-
CNN (He et al., 2017). There are loss functions de-
fined for the two stages of this branch. In the first
stage (the RPN), we calculate two losses, namely, ob-
jectness score loss (L
os
) and object proposal loss (L
op
.
For the second stage, we calculate three losses, classi-
fication loss L
cls
, bounding-box regression loss L
box
,
and mask loss L
mask
. The total loss for the instance
segmentation branch is given by:
L
instance
= L
os
+ L
op
+ L
cls
+ L
box
+ L
mask
(3)
Depth Completion. We used Mean Squared Error
(MSE) as loss for the depth completion branch. The
MSE was calculated and averaged over the pixels for
PanDepth: Joint Panoptic Segmentation and Depth Completion
639

which the corresponding ground truth depth values
were available in the sparse depth map. The loss func-
tion is defined by
L
depth
=
1
N
∑
i
( ˆy
i
− y
i
)
2
, (4)
where N is the number of pixels, ˆy
i
is the predicted
value and y
i
is the ground truth value for pixel i.
Joint Loss. In addition to the loss function related
to each task, we compute a loss involving each one
of the tasks performed by our model, in particular,
semantic segmentation, instance segmentation, and
depth completion. This loss is simply the sum of ev-
ery specific loss as in e.q. 5
L
joint
= L
semantic
+ L
instance
+ L
depth
. (5)
4 EXPERIMENTS
4.1 Implementation Details
We trained our model for 50 epochs on one machine
with four 32GB graphics processing units (GPUs)
running in parallel. The loss functions were opti-
mized using Adam algorithm with a learning rate set
to 0.0002.
4.2 Dataset
We trained and tested our models on Virtual KITTI 2
(Cabon et al., 2020). It is a synthetic dataset that pro-
vides ground truth annotations for semantic segmen-
tation, instance segmentation, depth estimation, and
optical flow for the entire dataset. It consists of five
scenes named ”Scene01”, ”Scene02”, ”Scene06”,
”Scene18”, and ”Scene20” which account for a to-
tal of 2126 unique frames of stereo images that are
augmented to recreate 10 different environment con-
ditions: clone, fog, morning, overcast, rain, sunset,
and four angle variations corresponding to ±15
◦
and
±30
◦
around the vertical axis. All in all, Virtual
KITTI 2 contains 21260 RGB stereo frames.
In our experiments, we discarded the angle vari-
ation splits, ±15
◦
and ±30
◦
, to reduce redundancy
in the dataset and kept the other six splits for train-
ing, evaluation, and testing. We trained on scenes
”Scene01”, ”Scene06”, and ”Scene20”, evaluated on
”Scene18” and tested on ”Scene02”. We resized the
input frames to 200px height and 1000px width.
(a) Fully dense depth map.
(b) Depth map, sparsity = 20%.
(c) Depth map, sparsity = 5%.
Figure 4: Depth maps visualization at different sparsity lev-
els.
Pre-Processing. Since Virtual KITTI 2 is a syn-
thetic dataset, it provides fully dense depth maps
for every single frame, however, in order to recre-
ate real conditions as close as possible, we sampled
the ground truth maps and set the sparsity to 20%,
meaning that only 20% of the pixels from any given
image would have a depth value available. On the
other hand, non-ground-truth maps were sampled to
have a sparsity of 5%. Under real-world conditions,
3D scenes are mapped with laser scanner devices, and
when the 3D points are projected onto a 2D plane,
they account for approximately 5% coverage of the
entire image. The ground truth, however, is usually
obtained by merging consecutive maps together, thus
increasing the sparsity to around 20% (Uhrig et al.,
2017). Figure 4 depicts the visual contrast between
different sparsity levels.
Panoptic Segmentation Annotations for Virtual
KITTI 2. Although Virtual Kitti 2 does not pro-
vide panoptic segmentation annotations directly, it is
possible to use semantic segmentation and instance
segmentation annotations to generate ground truth
panoptic segmentation annotations. All the scripts are
provided in the code repository. Thus, we hope to in-
crease the interest of the community in this dataset as
well as other possible datasets for which this approach
might be found suitable and useful.
4.3 Evaluation Metrics
We calculated the standard COCO metrics (Lin et al.,
2014) for every task. More specifically, we computed
the Intersection over Union (IoU) for semantic seg-
mentation, Mean Average Precision (mAP) for object
detection, as well as PQ, recognition quality (RQ),
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
640
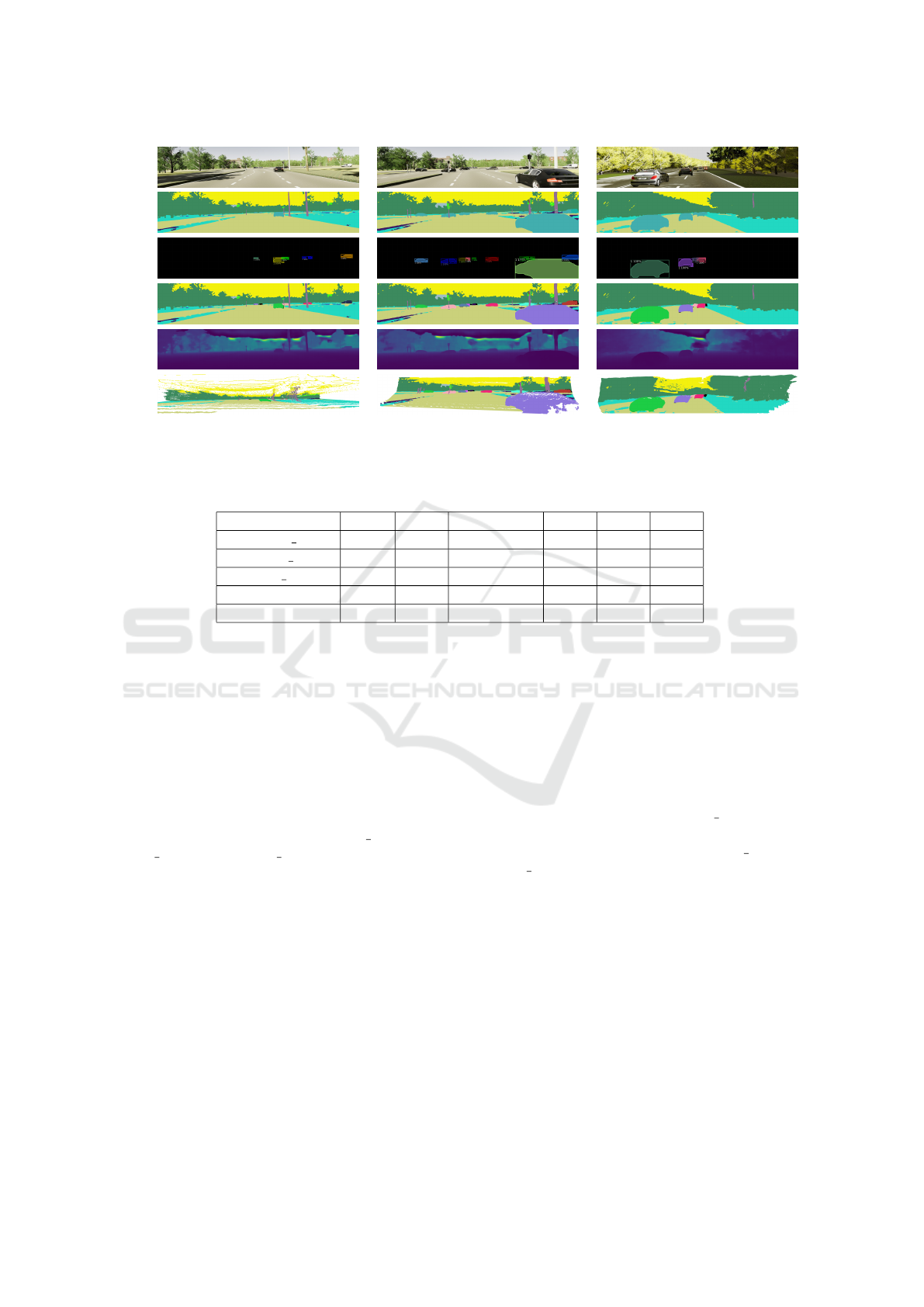
(a)(b)(c)(d)(e)(f)
Figure 5: Panoptic segmentation and depth completion results on Virtual KITTI 2. Rows from top down show: (a) RGB input
images, (b) semantic segmentation, (c) instance segmentation, (d) panoptic segmentation, (e) depth completion output, and
(f) 3D panoptic segmentation.
Table 1: Results of our model compared to baselines.
Method mIoU mAP RMSE(mm) PQ RQ SQ
Semantic only 0.380 - - - - -
Instance only - 0.691 - - - -
Depth only - - 623 - - -
SemSegDepth 0.387 - 677 - - -
PanDepth(ours) 0.413 0.597 653 0.384 0.450 0.467
and segmentation quality (SQ) for panoptic segmenta-
tion. In addition to the COCO metrics, we computed
the root means squared error (RMSE) to evaluate the
performance of the depth completion task.
4.4 Results
We compared the proposed PanDepth model against
equivalent models where only one of the task-specific
branches of PanDepth is enabled. Such mod-
els are listed in Table 1 as ”Semantic only”, ”In-
stance only”, and ”Depth only”. Table 1 also shows
the performance of the proposed model PanDepth
compared to SemSegDepth (Lagos and Rahtu, 2022),
a joint-learning model for semantic segmentation and
depth completion. SemSegDepth is a multi-task
learning model that follows an architecture similar to
that of our model PanDepth. On one hand, it consists
of task-specific branches with a shared backbone. On
the other hand, the input comprises heterogeneous
data, namely, RGB frames and sparse depth maps.
However, our model solves more tasks, thus provid-
ing a more holistic representation of the input scenes,
while keeping high accuracy in all evaluation metrics
as shown in Table 1. The qualitative results of the
proposed model can be inspected visually in Figure 5,
where the output of every individual task is depicted
as well as a 3D panoptic segmentation reconstructed
using the corresponding depth completion output and
panoptic segmentation output.
Our model outperforms SemSegDepth in both the
accuracy of the semantic segmentation task, as mea-
sured by the mIoU metric, and the depth completion
task, as measured by the RMSE metric. The proposed
PanDepth model also outperforms the semantic-
segmentation-only model (”Semantic only”) provid-
ing more evidence of the advantages of joint-learning.
Although the single-task models ”Instance only” and
”Depth only”, for instance segmentation and depth
completion respectively, show an increase in accuracy
compared to PanDepth, as reported by the mAP and
the RMSE, the proposed PanDepth model provides a
more complete scene understanding of 3D environ-
ments which is a favorable trade-off in autonomous
driving applications where holistic scene representa-
tions are highly valuable.
It is also important to note that the size of our
model does not increase significantly despite solving
multiple tasks. That is due to sharing structures such
as the feature extractor and relatively small model
branches as shown in Table 2.
PanDepth: Joint Panoptic Segmentation and Depth Completion
641
Table 2: Model size.
Structure Params
Backbone (EfficientNet-B5 ) 25.2M
2-way FPN 1.5M
Semantic Branch 1.2M
Instance Branch 53.1M
Depth Branch 1.9M
Joint Branch 1.2M
PanDepth Total Params 84M
5 CONCLUSIONS
This paper presents an end-to-end model for panoptic
segmentation and depth completion using heteroge-
neous data as input, namely RGB images, and sparse
depth maps. Our model yields a better scene under-
standing by providing a semantic representation of 3D
environments. We propose a joint-learning method to
perform multiple tasks, specifically semantic segmen-
tation, instance segmentation, depth completion, and
panoptic segmentation. Through a rigorous set of ex-
periments, we demonstrate, quantitatively and qual-
itatively, the advantages of joint learning and multi-
task models. Our model solves multiple computer vi-
sion tasks, keeping high-accuracy results compared to
other strong baselines, without a significant increase
in computational cost.
REFERENCES
Adelson, E. H. (2001). On seeing stuff: the perception of
materials by humans and machines. In IS&T/SPIE
Electronic Imaging.
Bul
`
o, S. R., Porzi, L., and Kontschieder, P. (2017). In-place
activated batchnorm for memory-optimized training
of dnns. CoRR, abs/1712.02616.
Cabon, Y., Murray, N., and Humenberger, M. (2020). Vir-
tual kitti 2.
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., and Zagoruyko, S. (2020). End-to-end object de-
tection with transformers. CoRR, abs/2005.12872.
Chen, L., Wang, H., and Qiao, S. (2020a). Scaling wide
residual networks for panoptic segmentation. CoRR,
abs/2011.11675.
Chen, Y., Yang, B., Liang, M., and Urtasun, R. (2020b).
Learning joint 2d-3d representations for depth com-
pletion. CoRR, abs/2012.12402.
Chen, Y., Yang, B., Liang, M., and Urtasun, R. (2020c).
Learning joint 2d-3d representations for depth com-
pletion.
Cheng, B., Collins, M. D., Zhu, Y., Liu, T., Huang, T. S.,
Adam, H., and Chen, L. (2019). Panoptic-deeplab: A
simple, strong, and fast baseline for bottom-up panop-
tic segmentation. CoRR, abs/1911.10194.
Cheng, B., Misra, I., Schwing, A. G., Kirillov, A., and
Girdhar, R. (2021a). Masked-attention mask trans-
former for universal image segmentation. CoRR,
abs/2112.01527.
Cheng, B., Schwing, A. G., and Kirillov, A. (2021b). Per-
pixel classification is not all you need for semantic
segmentation. CoRR, abs/2107.06278.
Chollet, F. (2016). Xception: Deep learning with depthwise
separable convolutions. CoRR, abs/1610.02357.
de Geus, D., Meletis, P., and Dubbelman, G. (2019).
Fast panoptic segmentation network. CoRR,
abs/1910.03892.
Eldesokey, A., Felsberg, M., and Khan, F. S. (2018). Con-
fidence propagation through cnns for guided sparse
depth regression. CoRR, abs/1811.01791.
Gansbeke, W. V., Neven, D., Brabandere, B. D., and
Gool, L. V. (2019). Sparse and noisy lidar com-
pletion with RGB guidance and uncertainty. CoRR,
abs/1902.05356.
Gao, N., He, F., Jia, J., Shan, Y., Zhang, H., Zhao, X., and
Huang, K. (2022). Panopticdepth: A unified frame-
work for depth-aware panoptic segmentation.
Guo, P., Lee, C., and Ulbricht, D. (2020). Learn-
ing to branch for multi-task learning. CoRR,
abs/2006.01895.
Hazirbas, C., Ma, L., Domokos, C., and Cremers, D.
(2016). Fusenet: Incorporating depth into semantic
segmentation via fusion-based cnn architecture. In
Asian Conference on Computer Vision (ACCV).
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. B. (2017).
Mask R-CNN. CoRR, abs/1703.06870.
He, L., Lu, J., Wang, G., Song, S., and Zhou, J. (2021).
Sosd-net: Joint semantic object segmentation and
depth estimation from monocular images. CoRR,
abs/2101.07422.
Hou, R., Li, J., Bhargava, A., Raventos, A., Guizilini, V.,
Fang, C., Lynch, J. P., and Gaidon, A. (2019). Real-
time panoptic segmentation from dense detections.
CoRR, abs/1912.01202.
Hu, M., Wang, S., Li, B., Ning, S., Fan, L., and Gong, X.
(2021). Penet: Towards precise and efficient image
guided depth completion. CoRR, abs/2103.00783.
Jaritz, M., de Charette, R., Wirbel,
´
E., Perrotton, X., and
Nashashibi, F. (2018). Sparse and dense data with
cnns: Depth completion and semantic segmentation.
CoRR, abs/1808.00769.
Kirillov, A., Girshick, R. B., He, K., and Doll
´
ar, P.
(2019). Panoptic feature pyramid networks. CoRR,
abs/1901.02446.
Kirillov, A., He, K., Girshick, R. B., Rother, C., and
Doll
´
ar, P. (2018). Panoptic segmentation. CoRR,
abs/1801.00868.
Lagos, J. P. and Rahtu, E. (2022). Semsegdepth: A com-
bined model for semantic segmentation and depth
completion. In Farinella, G. M., Radeva, P., and Boua-
touch, K., editors, Proceedings of the 17th Interna-
tional Joint Conference on Computer Vision, Imag-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
642

ing and Computer Graphics Theory and Applica-
tions, VISIGRAPP 2022, Volume 5: VISAPP, On-
line Streaming, February 6-8, 2022, pages 155–165.
SCITEPRESS.
Li, B. and Dong, A. (2021). Multi-task learning with at-
tention : Constructing auxiliary tasks for learning to
learn. In 2021 IEEE 33rd International Conference on
Tools with Artificial Intelligence (ICTAI), pages 145–
152.
Li, Y., Chen, X., Zhu, Z., Xie, L., Huang, G., Du, D., and
Wang, X. (2018). Attention-guided unified network
for panoptic segmentation. CoRR, abs/1812.03904.
Li, Z., Wang, W., Xie, E., Yu, Z., Anandkumar, A., Alvarez,
J. M., Lu, T., and Luo, P. (2021). Panoptic segformer.
CoRR, abs/2109.03814.
Liebel, L. and K
¨
orner, M. (2019). Multidepth: Single-
image depth estimation via multi-task regression and
classification. CoRR, abs/1907.11111.
Liebel, L. and K
¨
orner, M. (2018a). Auxiliary tasks in multi-
task learning.
Liebel, L. and K
¨
orner, M. (2018b). Auxiliary tasks in multi-
task learning.
Lin, T., Maire, M., Belongie, S. J., Bourdev, L. D., Girshick,
R. B., Hays, J., Perona, P., Ramanan, D., Doll
´
ar, P.,
and Zitnick, C. L. (2014). Microsoft COCO: common
objects in context. CoRR, abs/1405.0312.
Liu, H., Peng, C., Yu, C., Wang, J., Liu, X., Yu, G., and
Jiang, W. (2019). An end-to-end network for panoptic
segmentation. CoRR, abs/1903.05027.
Liu, S., Johns, E., and Davison, A. J. (2018). End-
to-end multi-task learning with attention. CoRR,
abs/1803.10704.
Long, J., Shelhamer, E., and Darrell, T. (2014). Fully
convolutional networks for semantic segmentation.
CoRR, abs/1411.4038.
Mohan, R. and Valada, A. (2020). Efficientps: Efficient
panoptic segmentation. CoRR, abs/2004.02307.
Park, J., Joo, K., Hu, Z., Liu, C., and Kweon, I. S. (2020).
Non-local spatial propagation network for depth com-
pletion. CoRR, abs/2007.10042.
Petrovai, A. and Nedevschi, S. (2019). Multi-task network
for panoptic segmentation in automated driving. In
2019 IEEE Intelligent Transportation Systems Confer-
ence (ITSC), pages 2394–2401.
Qiu, J., Cui, Z., Zhang, Y., Zhang, X., Liu, S., Zeng,
B., and Pollefeys, M. (2018). Deeplidar: Deep sur-
face normal guided depth prediction for outdoor scene
from sparse lidar data and single color image. CoRR,
abs/1812.00488.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. CoRR, abs/1505.04597.
Ruder, S. (2017). An overview of multi-task learning in
deep neural networks. CoRR, abs/1706.05098.
Schon, M., Buchholz, M., and Dietmayer, K. (2021).
MGNet: Monocular geometric scene understanding
for autonomous driving. In 2021 IEEE/CVF Interna-
tional Conference on Computer Vision (ICCV). IEEE.
Sener, O. and Koltun, V. (2018). Multi-task learning as
multi-objective optimization. CoRR, abs/1810.04650.
Tan, M. and Le, Q. V. (2019). Efficientnet: Rethink-
ing model scaling for convolutional neural networks.
CoRR, abs/1905.11946.
Tang, J., Tian, F., Feng, W., Li, J., and Tan, P. (2019). Learn-
ing guided convolutional network for depth comple-
tion. CoRR, abs/1908.01238.
Uhrig, J., Schneider, N., Schneider, L., Franke, U., Brox, T.,
and Geiger, A. (2017). Sparsity invariant cnns. CoRR,
abs/1708.06500.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J.,
Jones, L., Gomez, A. N., Kaiser, L., and Polo-
sukhin, I. (2017). Attention is all you need. CoRR,
abs/1706.03762.
Wang, H., Zhu, Y., Adam, H., Yuille, A. L., and Chen, L.
(2020). Max-deeplab: End-to-end panoptic segmenta-
tion with mask transformers. CoRR, abs/2012.00759.
Wang, S., Suo, S., Ma, W.-C., Pokrovsky, A., and Urta-
sun, R. (2018). Deep parametric continuous convolu-
tional neural networks. 2018 IEEE/CVF Conference
on Computer Vision and Pattern Recognition.
Xiong, Y., Liao, R., Zhao, H., Hu, R., Bai, M., Yumer, E.,
and Urtasun, R. (2019). Upsnet: A unified panoptic
segmentation network. CoRR, abs/1901.03784.
Yang, Y., Wong, A., and Soatto, S. (2019). Dense depth
posterior (DDP) from single image and sparse range.
CoRR, abs/1901.10034.
Yuan, H., Li, X., Yang, Y., Cheng, G., Zhang, J., Tong,
Y., Zhang, L., and Tao, D. (2021). Polyphonicformer:
Unified query learning for depth-aware video panoptic
segmentation. CoRR, abs/2112.02582.
Zhu, X., Su, W., Lu, L., Li, B., Wang, X., and Dai, J. (2020).
Deformable DETR: deformable transformers for end-
to-end object detection. CoRR, abs/2010.04159.
Zou, N., Xiang, Z., Chen, Y., Chen, S., and Qiao, C.
(2020a). Simultaneous semantic segmentation and
depth completion with constraint of boundary. Sen-
sors, 20(3).
Zou, N., Xiang, Z., Chen, Y., Chen, S., and Qiao, C.
(2020b). Simultaneous semantic segmentation and
depth completion with constraint of boundary. Sen-
sors, 20(3).
PanDepth: Joint Panoptic Segmentation and Depth Completion
643
