
Catch Me if You Can: Improving Adversaries in Cyber-Security with
Q-Learning Algorithms
Arti Bandhana
a
, Ond
ˇ
rej Luk
´
a
ˇ
s
b
, Sebastian Garcia
c
and Tom
´
a
ˇ
s Kroupa
d
Czech Technical University, Czech Republic
Keywords:
Q-Learning, Reinforcement Learning, MDP, Cybersecurity, Learning Agents, Advanced Persistent Threat.
Abstract:
The ongoing rise in cyberattacks and the lack of skilled professionals in the cybersecurity domain to combat
these attacks show the need for automated tools capable of detecting an attack with good performance. At-
tackers disguise their actions and launch attacks that consist of multiple actions, which are difficult to detect.
Therefore, improving defensive tools requires their calibration against a well-trained attacker. In this work, we
propose a model of an attacking agent and environment and evaluate its performance using basic Q-Learning,
Naive Q-learning, and DoubleQ-Learning, all of which are variants of Q-Learning. The attacking agent is
trained with the goal of exfiltrating data whereby all the hosts in the network have a non-zero detection prob-
ability. Results show that the DoubleQ-Learning agent has the best overall performance rate by successfully
achieving the goal in 70% of the interactions.
1 INTRODUCTION
The risk of cyber attacks is constantly increasing. At-
tackers continue to become more sophisticated and
manage to find new vulnerabilities to exploit, making
the role of network defenders skewed and asymmet-
ric. Most attack techniques involve little direct inter-
action between the attacker and the defender. In at-
tacks such as ransomware (ENISA, 2022), port scan-
ning or cryptocurrency mining, the interaction can be
as little as only one action from the attacker. In more
complex attacks such as banking trojans or Advanced
Persistent Threat (APT) attacks (Dra
ˇ
sar et al., 2020),
the attacker has to perform a series of steps within
the network or target device to be successful while re-
maining undetected. Such attacks are extremely dif-
ficult to detect, yet they are the most impactful. APT
attacks are usually long-term, with many decisions
typically taken by a human adapting their tactics and
techniques to avoid detection and in most cases, the
defense mechanisms are not versatile enough to adapt
to the behavior of an attacker.
APT attackers can be modeled as agents who pur-
sue their goals while interacting with an environment
a
https://orcid.org/0000-0002-3711-3645
b
https://orcid.org/0000-0002-7922-8301
c
https://orcid.org/0000-0001-6238-9910
d
https://orcid.org/0000-0003-1531-2990
(target device or network). Most of these interac-
tions are captured mainly by Game theory or Rein-
forcement Learning (RL) models with the intent of
improving defenses in the network. Game-theoretic
frameworks are used to provide solutions for opti-
mal defenses (such as honeypot allocation) but RL
models are mostly used to improve penetration test-
ing attacks (Durkota et al., 2016; Mitchell and Healy,
2018). LSTM network and Q-Learning techniques
are also being applied to predict the attacker’s action
in APT data sets (Dehghan et al., 2022). However,
modeling realistic defenses inevitably requires learn-
ing almost optimal decisions for attackers. To the best
of our knowledge, there are no studies about model-
ing APT attacker’s behavior with the goal to improve
the decisions made by the attacker. Creating a real-
istic inference model for the attacker requires con-
sideration of factors such as intent, capabilities, ob-
jectives, opportunities, and available resources for the
attacker (Moskal et al., 2018; Liu et al., 2005). Due to
the complexity of these attributes, developing a gen-
eral framework becomes challenging. To overcome
these challenges, RL models are generally applied to
train and solve an optimal policy from a defender’s
perspective; however, we are unaware of a RL model
to optimize the actions of an APT attacker.
In this paper, we model both an APT attacker and
a network environment to train RL agents that opti-
mize the attack. The goal of the attacker is to exfiltrate
442
Bandhana, A., Lukáš, O., Garcia, S. and Kroupa, T.
Catch Me if You Can: Improving Adversaries in Cyber-Security with Q-Learning Algorithms.
DOI: 10.5220/0011684500003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 442-449
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

data from a specific server inside a local network to a
command and control (C&C) server in the Internet.
To find the optimal policy for the attacker, three off-
policy RL algorithms are trained: Q-Learning, Naive
Q-Learning, and DoubleQ-Learning.
Our results show that the DoubleQ-Learning-
based attacker agent is able to exfiltrate data in almost
70% of the interactions.
Furthermore, we show that the agent can learn
how to plan and execute a multistage data exfiltration
attack detected less than 40% of the time. From a cy-
bersecurity point of view, it means that a model of an
attacker can be learned and improved, and therefore a
better model of the defender could be learned in fu-
ture research.
The main contributions of this paper are:
• a novel model of a decision-making entity (APT
attacker) in an adversarial environment;
• implementation of RL algorithms for an attacking
agent in a custom environment; and
• an analysis of the impact of APT attacker models
on the cybersecurity domain.
The paper is structured as follows. Section 2 pro-
vides the motivation and previous work. Section 3
describes the RL environment. Section 4 presents the
RL algorithms; Section 5 presents the setup of the
experiments; Section 6 presents the results and dis-
cusses their impact. The conclusions and future work
are contained in Section 7.
2 MOTIVATION & RELATED
WORK
There are two main sources of motivation for study-
ing the behavioral models of attackers in APT attacks
for local networks. First, improving defense mecha-
nisms (algorithms, antivirus systems, etc.) based on
the knowledge of past attacks highlights the need to
better understand the characteristics of nearly optimal
attack behaviors in realistic networks. Second, by cre-
ating and training RL models of the attacker’s behav-
ior, it is possible to optimize future defense mecha-
nisms and the dynamic properties of such systems.
Game theory and RL (Shiva et al., 2010) have
gained traction over the years in modeling attack and
defense mechanisms in many domains, including net-
work security.
Network security problems are primarily complex
and require rational decision-making. Game theory
provides mathematical models of strategic interaction
among multiple decision makers (players or agents)
along with algorithms for finding solutions (equilib-
ria) in such scenarios. The potential benefit of apply-
ing game theory to network security is the automa-
tion of the exhaustive threat detection process for net-
work administrators. However, real-world cybersecu-
rity models may have limitations with regard to the
information observed by players. Typically, the de-
fender’s knowledge of the attacker’s strategy and de-
cisions is limited (Patil et al., 2018). This leads to
games with partial observation or incomplete infor-
mation, which are extremely difficult to scale to the
required size of the problem.
In the area of game theory for security, there
has been promising research in honeypot technolo-
gies (Anwar and Kamhoua, 2022). The authors de-
signed an optimal approach for honeypot allocation
by formulating a two-player zero-sum game between
the defender and the attacker, which is played on top
of an attack graph. The defender places honeypots
on machines, while the attacker selects an attack path
through the attack graph, which would lead to the tar-
get machine without being detected. In addition to
solving an effective strategy for honeypot placement
in the network, the authors also experiment with a di-
versity of honeypot configurations. Diversifying the
honeypot configuration ensures that not all honeypots
are discovered if one is compromised; however, this
adds to the operational cost. To automate response to
a cyber attack, (Hammar and Stadler, 2020) investi-
gate methods where strategies evolve without human
intervention and do not require domain knowledge.
The authors model the cyber interaction as a Markov
game and use simulations of self-play where agents
interact and update their strategies based on experi-
ence from previously played games.
Another promising research direction used Proxi-
mal Policy Optimization (PPO) with self-play to solve
a stochastic (Markov) two-player game with sequen-
tial moves between defender and attacker (Du et al.,
2022). The game is played on top of an attack graph,
and the authors show that the performance of a PPO
policy is better than that of a heuristic policy. The ini-
tial results are promising, but the setting used by the
authors is limited to the attack graph with five nodes
and four edges. By contrast, our work deals only with
a single-agent environment.
Attack graphs are helpful, as they can predict
the attacker’s path depending on the vulnerabilities
present in the network. At the same time, defend-
ers can leverage attack graphs to find an effective de-
fense strategy. In particular, (Guo et al., 2021) pro-
vides defense solutions through edge blocking in an
attack graph constructed in the active directory. An-
other stream of research focuses on the assistance of
Catch Me if You Can: Improving Adversaries in Cyber-Security with Q-Learning Algorithms
443
attacking tools for better penetration testing or cyber-
training, for example, using Deep Q-Learning (Nicu-
lae et al., 2020). The authors compare Q-Learning,
Extended Classifier Systems (XCS), and Deep Q-
Networks (DQN) to find attacker strategies. To de-
termine the best response for a suspicious user on the
network, (Chung et al., 2016) compares the variations
of Q-Learning with a stochastic game.
3 ENVIRONMENT MODEL
Q-Learning is one of the most widely applied model-
free off-policy RL algorithms (Jang et al., 2019a).
It allows agents to learn in domains with Markovian
properties and thus can be modeled as a Markov De-
cision Process (MDP). Sufficient exploration of the
environment is done with a ε-greedy policy. An ε-
greedy method chooses a uniformly random action
with probability ε and greedy action with probabil-
ity 1 − ε. The hyperparameter ε is chosen to balance
exploration and exploitation, intending to maximize
the cumulative reward.
An MDP is used as the underlying model (Sut-
ton and Barto, 2018) as the focus is on training a sin-
gle attacking agent. Such an approach results in the
defender being part of the environment. In real-life
scenarios, successful detection requires several steps,
from placement of the defensive measures, detecting
and generating alerts, to evaluating and addressing
threats. In this work, the defender is modeled as a
stochastic and global part of the environment.
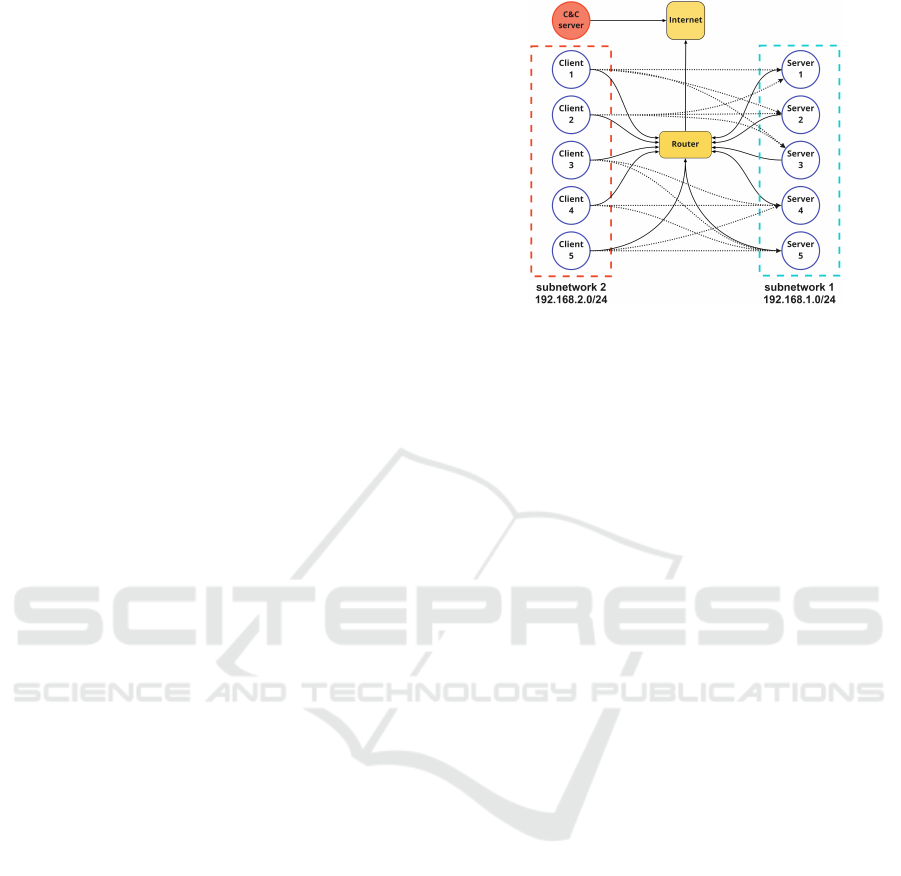
3.1 Network
The computer network used for the definition of the
environment represents a small organization with five
clients, five servers, and a router that provides Inter-
net; see figure 1. Each host in the network has In-
ternet access. The router is also a firewall that con-
trols which clients from subnetwork 2 can access the
servers in subnetwork 1 (corresponding to dotted lines
in figure 1). Computers can connect to each other if
they are in the same subnetwork.
In the environment, we assume that the attacker
has already gained access to one of the clients on the
network. Additionally, the attacker knows the address
of an external C&C server on the Internet. The at-
tacker’s goal is to find and exfiltrate data located in
one of the servers in subnetwork 1.
Figure 1: Network topology with two local subnetworks
and a C&C server on the Internet. The solid black lines
represent direct network connectivity (such as Ethernet ca-
bles). The dotted lines represent logical connections from
clients to servers as allowed by the firewall. In the non-
randomized experiments, the attacker starts in Client 1. In
the experiments with a randomized start, the attacker starts
in one of the clients in subnetwork 2. The IP address of the
C&C server is always known to the attacker.
3.2 Defender
The defender in our model is an entity present in all
clients/servers simultaneously and it has assigned a
probability of detecting the attacker’s action. Once
the attacker is detected, the episode ends and the en-
vironment is reset to the initial state. This is repre-
sented by a terminal state in the environment. Given
that the defender has full network visibility, there is a
probability of detection for each action on all clients
and servers.
3.3 Attacker
Attackers usually do not have information about
the network and so they must compensate for lack
of knowledge by learning through trial and error.
We simulate an attacker who has already gained a
foothold in subnetwork 1 (figure 1) according to our
assumption. This holds for a real-world scenario, as
the initial breach can be done in various ways since
there are many connected devices on the network,
and preventing the initial breach in some ways is ex-
tremely hard. Therefore, modeling the attacker entry
in our current setup is ignored. The attacker’s objec-
tive is to find the optimal path to a server in subnet-
work 2 containing sensitive data, find and exfiltrate
this data, and make it accessible on the web. The
available actions are the minimal actions required to
complete the goal: find hosts, find services, get ac-
cess, find data, and exfiltrate. The attacker was mod-
eled as a rational attacker behaving optimally.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
444
3.4 States
A state is an abstract representation of the environ-
ment from the attacker’s perspective. It contains sev-
eral assets the attacker can use or has discovered with
previous actions. Therefore, the state of the environ-
ment changes based on the actions of the attacker and
the current state. The probabilities p(a|s) represent
the probability of success of the attacker’s action a in
a state s and p(detection|s,a) represents the probabil-
ity of detection given the action a played in the state s.
These probabilities (table 1) of success and detection
were set based on the expert evaluations of penetra-
tion test professionals, where knowledge of the do-
main was compared and matched with the evaluation
of various detection tools for malicious behavior dis-
covery shown in (Huang et al., 2022).
Table 1: Probability of success and detection for each action
executed by the attacker in the network.
Action
Success
probability
Detection
probability
ScanNetwork 0.9 0.2
FindServices 0.9 0.3
ExecudeCode InService 0.7 0.4
FindData 0.8 0.1
ExfiltrateData 0.8 0.1
Success probabilities are based on known tools
and techniques. While network issues are the cause
of the failure of most actions, in the case of Execute-
CodeInService other problems such as service ver-
sions and exploits quality have to be taken into ac-
count. Detection probabilities consider the false pos-
itives found in real networks with benign traffic by a
human player. Some actions, such as ScanNetwork
with ARP scan, are highly successful and barely rec-
ognized (off-the-shelf state-of-the-art IDS can not de-
tect it (Hou et al., 2010)). Often, even if these scans
are detected, such alerts are dismissed for the sake of
limiting the False positives. The same applies to Find-
Data which is performed locally and thus nearly un-
detectable and ExfiltrateData which when done cor-
rectly, is known to be extremely hard to distinguish
from benign traffic.
At each time step, the following information is part of
the state:
• set of networks the attacker has discovered;
• set of hosts the attacker has discovered;
• set of hosts that the attacker has control of;
• set of services the attacker has discovered in each
host; and
• set of data the attacker has discovered in a host.
Having states consisting of assets, we can fol-
low the well-known STRIPS representation originally
designed for planning (Fikes and Nilsson, 1971).
STRIPS describes transitions in a system as opera-
tors, which are applicable if preconditions are met.
Originally, the effects of add and delete can be speci-
fied for each operator. However, in our approach, we
completely omit the delete effect, which results in a
relaxed problem representation (Bonet and Geffner,
2001). Problem relaxation is a commonly used
method in a variety of AI areas. Such an approach
simplifies the problem of traversing the state space.
3.5 Actions
The attacker’s actions follow the subset of techniques
for adversary behavior listed in Mitre ATT&CK
1
. As
we are only representing one type of goal in this
model, data exfiltration, only the subset of Mitre ac-
tions related to data exfiltration are used:
1. active scanning:
(a) find computers in the network
(b) find services run on the hosts in the network
(c) find data in the computer
2. attack service to execute code; and
3. exfiltrate data to the Internet.
The attacker in our model follows a five-step ac-
tion as represented in Table 2 to reach its goal.
Table 2: List of actions and their effect on the network lead-
ing to a change in state.
Action Description Preconditions Effects
ScanNetwork
Scans complete
range of given network
network + mask extends ’known hosts’
FindServices
Scans given host
for running services
host IP
extends ’known services’
with host:service pairs
ExecudeCode
InService
Runs exploit in service
to gain control of a host
host:service extends ’controlled hosts’
FindData
Runs code to discover
data in a controlled host
hostIP
extends ’known data’ with
host:data pairs
ExfiltrateData
Moves data from one
controlled host to another
host:data:host
extends ’known data’
with ’target:data’
3.6 Rewards
The reward is an incentive that the agent receives with
respect to the state action pair. In our model, the re-
ward of the agent is constructed as: −1 for every ac-
tion taken,−50 if the action is detected, and +100 if
the goal state is reached.
The small negative reward per action is intended
to motivate the agent to find the shortest path to the
goal. The +100 reward for the achievement of the
1
https://attack.mitre.org/
Catch Me if You Can: Improving Adversaries in Cyber-Security with Q-Learning Algorithms
445

goal allows the attacker to take actions with a higher
expected detection probability if they lead to a higher
expected reward.
3.7 Implementation
The representation of a state, as described in sec-
tion 3.4, allows the modification of the environment
without the need to retrain the agent from zero. This
differentiates our environment model and offers a
higher degree of modularity for various cybersecurity
scenarios. Instead of allocating the complete Q-table
prior to training, our agents create the Q-values dy-
namically, saving both memory and time during train-
ing.
4 LEARNING AGENTS
To train and evaluate the attacker’s performance, we
use Q-Learning (Jang et al., 2019a) and its vari-
ants: Naive Q-Learning and Double Q-Learning. Q-
Learning is a reinforcement learning algorithm that
approximates the optimal state-action value function
independently of the policy being followed. It is an
off-policy algorithm that separates learning from the
current acting policy by updating the Q-value Q(s,a),
which is an indication of how good a state-action pair
is. The equation for the Q-value update is:
Q(s,a)
:
= Q(s,a) + α(R
t+1
+ γV
t
(s
0
)), (1)
where α ∈ [0,1] is the learning rate and γ ∈ [0,1] is the
discount factor that captures the concept of deprecia-
tion. A value closer to 0 means that the current reward
is preferred over future rewards.
In Naive Q-Learning, the learning rate is partially
allocated to the previous result to combine the knowl-
edge of the past history during learning, the actual
immediate reward in the current iteration, and the ex-
pected future reward (Chung et al., 2016). This leads
to the following variation of equation (1):
Q(s,a)
:
= αQ(s,a) + (1 − α)(R
t+1
+ γV
t
(s
0
)) (2)
Double Q-Learning (Hasselt, 2010; Jang et al.,
2019b) proposes learning two Q-functions instead of
one. Each Q-function gets the update from the other
for the next state. These two Q-functions are an un-
biased estimate of the value of the action. The action
selection is then performed by averaging or adding
the two Q values for each action and then performing
ε-greedy action selection with the resulting Q values.
In this paper, action selection is performed by adding
the two Q values before performing the ε-greedy.
Q
A
(s,a)
:
= Q
A
(s,a) + α(R + γQ
B
(s
0
,a
0
) − Q
A
(s,a))
(3)
Q
B
(s,a)
:
= Q
B
(s,a) + α(R + γQ
A
(s
0
,a
0
) − Q
B
(s,a))
(4)
The other two learning agents also use ε-greedy
as the action selection criteria in accordance with the
original papers.
5 EXPERIMENT SETUP
Three different scenarios were used to train the learn-
ing agents: specific attacker position, random attacker
position, and random target server to attack.
In the first scenario, the attacker is placed on
client 1 in subnetwork 2 (figure 1). We define a client
as an official device on the network used for work and
a server as a device that holds data and offers services
accessed by the clients. The attacker’s goal is to reach
the target server, which is specified as server 3 in sub-
network 1; exfiltrate the data from the target server to
the C&C server outside the local network.
There are five clients in subnetwork 2, and in re-
ality, any connected device within the network is sus-
ceptible to an attack; therefore, for the second sce-
nario, we randomly assign the starting position of the
attacker. This was done to compare the performance
of the learning agents and see how they adapt to ran-
domness in the starting position. In addition to ran-
domizing the starting position, we also randomized
the target server for data exfiltration; which was our
third scenario.
For successful achievement of the goal state, at
least 5 successful actions had to be performed in all
3 scenarios; however, if the agent exceeds the limit of
25 actions per episode, the interaction is terminated.
The defender in all 3 scenarios is an entity with
unlimited visibility and is present in all hosts, that is,
every action can be detected with a predefined proba-
bility. Additionally, we assume that all services run-
ning on the hosts are exploitable and that a connection
to the Internet is available on all hosts.
The learning parameter for each algorithm is pre-
sented in Table 3. Experiments start with a random
attacker which randomly picks an action. The Q-
Learning agent and the DoubleQ-Learning agent were
trained on a learning rate of 0.3, while the Naive Q-
Learning agent was trained on a learning rate of 0.8.
The action selection parameter controlled by epsilon
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
446

was kept at 0.2 for all the agents; however, Double Q-
Learning used a linearly decaying ε from 0.2 to 0.05.
In all experiments, we measured the win rate, the
detection rate, and the mean return of the episodes.
The win rate represents the percentage of interac-
tions that were successful for the attacker, which is
the number of times the attacker was able to reach
the goal state and exfilter the data in 10 000 episodes.
The detection rate represents the percentage of inter-
actions that were detected and resulted in the attacker
receiving a reward of −50.
Table 3: Training parameters: Q-Learning and DoubleQ-
Learning agents were trained in 10000 episodes, while
NaiveQ-Learning was trained in 5 000 episodes. The dis-
count factor γ was kept at 0.9 for all learning agents.
Algorithm α ε γ
No. of
episodes
Random - - - -
Q-Learning 0.3 0.2 0.9 10 000
Naive Q-Learning 0.8 0.2 0.9 5 000
Double Q-Learning 0.3 0.2 0.9 10 000
6 EXPERIMENTAL RESULTS
The following results were obtained in the first sce-
nario of the experiment, when the attacker’s position
was specified in the network. Table 4 summarizes
the performance of the different learning agents. The
random attacker, without any knowledge of the net-
work and without any strategy, has a detection rate of
99.58%, while the DoubleQ-Learning attacker had a
detection rate of 33%. The Q-learning and Naive Q-
Learning agents have similar detection rates.
Table 4: Performance comparison of the learning agents
with a fixed attacker starting in client1. Q-Learning and
Double Q-Learning were trained with 10 000 episodes,
while Naive Q-Learning was trained with 5 000 episodes.
Algorithm
Winning
rate (%)
Detection
rate (%)
Mean
return
Random 0.48 99.58 53.03
Q-Learning 66.4 40.4 43.94
Naive Q-Learning 66.91 40.19 43.94
Double Q-Learning 74.0 33.0 54.61
Randomizing the starting position decreases the
win rate and increases the detection rate for all learn-
ing agents, as shown in table 5. The Naive Q-
Learning agent had the greatest impact on perfor-
mance due to the randomness of the starting posi-
tion among all learning agents. The detection rate in-
Table 5: Comparison of performance for the learning agents
in a scenario with randomized attacker’s starting random-
ized. Q-Learning and Double Q-Learning were trained with
10 000 episodes, while Naive Q-Learning was trained with
5 000 episodes.
Algorithm
Winning
rate (%)
Detection
rate (%)
Mean
return
Random 0.34 99.48 -54.04
Q-Learning 65.4 39.27 41.97
Naive Q-Learning 54.27 50.78 25.59
Double Q-Learning 68.9 36.8 47.58
Table 6: Comparison of learning agents in a scenario where
the attacker’s starting point and target server were random-
ized. All algorithms were trained on 10 000 episodes.
Algorithm
Winning
rate (%)
Detection
rate (%)
Mean
return
Q-Learning 53.3 53 23.45
Naive Q-Learning 61.8 44.1 36.8
Double Q-Learning 64.9 41.7 41.2
creased from 40.4% to 50.78%
Figure 2: Comparison of the mean cumulative reward of
agents during the learning process in the scenario with de-
fender and randomized starting position for the attacker.
6.1 Analysis of Results
We compared how agents with varying parameters
learned a policy in a network with ten hosts in the
presence of a defender with full visibility. The detec-
tion probability was nonzero for actions at all clients
and servers. When comparing the win rate and the
detection rate for all learning agents, it is clear that
Double Q-Learning outperforms all other agents in
all scenarios. Two Q-functions are trained in such
agent but from different episodes which makes the
training more robust. A sum of the Q-functions is
used during inference. This avoids the overestimation
Catch Me if You Can: Improving Adversaries in Cyber-Security with Q-Learning Algorithms
447
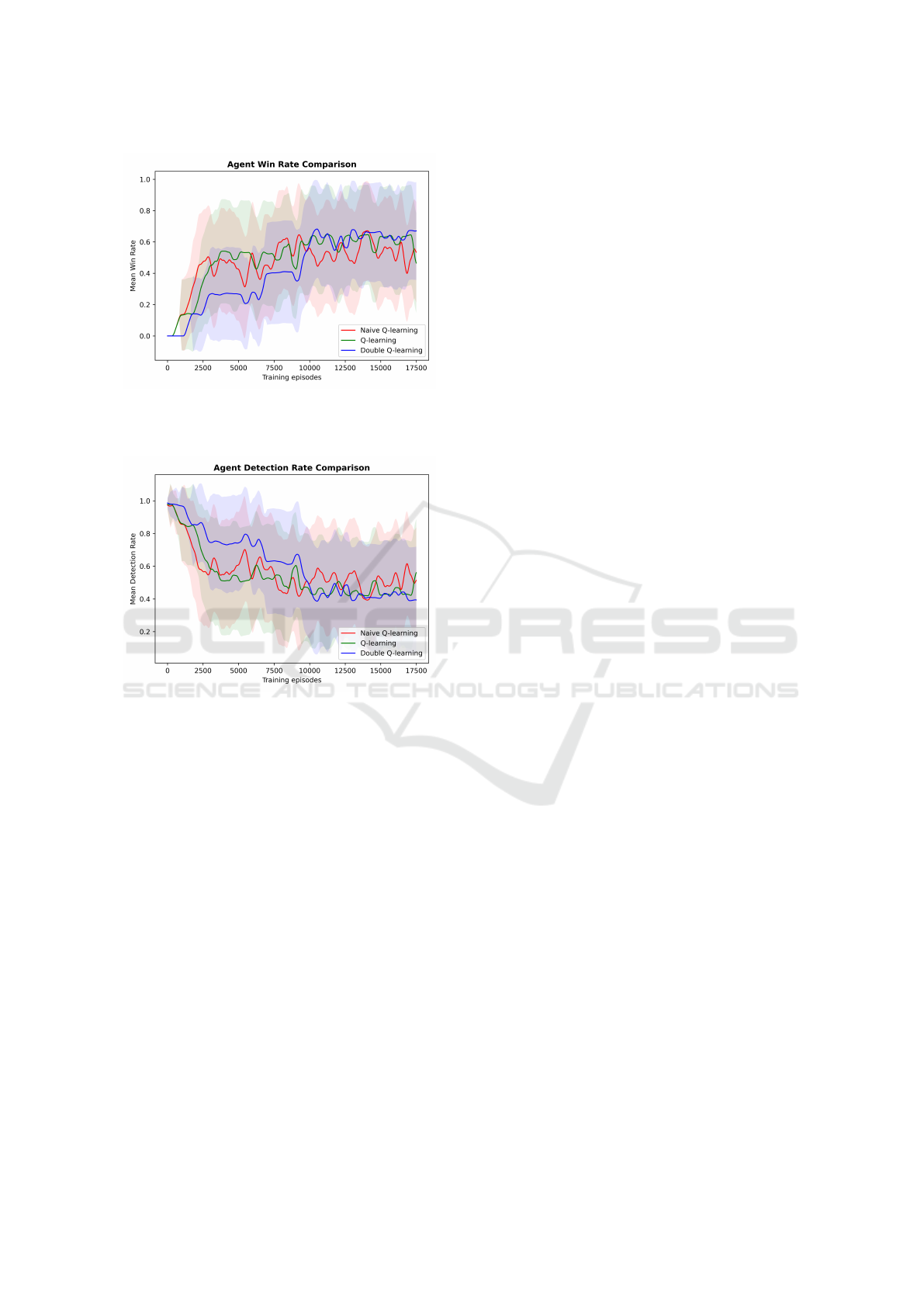
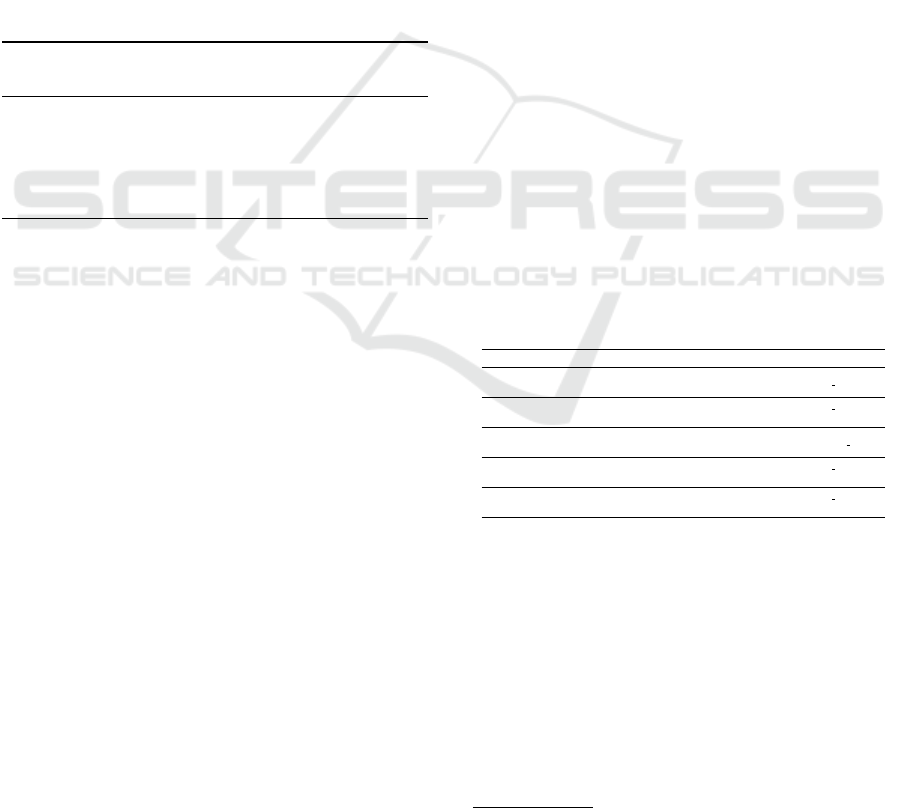
Figure 3: Comparison of the winning rate of agents dur-
ing the learning process in the scenario with defender and
randomized starting position.
Figure 4: Comparison of the detection rate of agents dur-
ing the learning process in the scenario with defender and
randomized starting position.
bias of Q-Learning and leads to better training sta-
bility even in a noisy environment. The Q-Learning
attacker and the Naive Q-Learning attacker have the
same performance for the first scenario where the
starting point was specified. This is due to the dis-
tribution of the learning rate according to equations
(1) and (2). A learning rate of 0.8 was used for Naive
Q-Learning, which in comparison with the Q-learning
gives similar results as the learning rate of 0.2. How-
ever, the performance of Naive Q-Learning decreased
when the starting position was randomized. This is
attributed to the weighting of the update rule of the
Q-value, as shown in equation ( 2). When consider-
ing negative rewards, the update affects the Q-value
more than the standard Q-Learning due to the split
update α. Although this can be beneficial in the cases
of high positive rewards, the results show that this ap-
proach lacks adaptability in the case of the stochastic
environment.
Figures 3 and 4 show that DoubleQ-Learning out-
performs the other two agents in terms of winning and
detection rates. The high variance of the mean re-
turns, as shown in figure 2 is the result of the stochas-
tic environment and the reward distribution described
in section 3.6. The graphs also show that even though
DoubleQ-Learning performs badly in the beginning,
over time as the number of episodes increases and
state-action values are updated, it outperforms the
other two learning agents. In particular, even if the
agent’s policy is optimal, it cannot influence the de-
tection and subsequent reward of −50. Therefore, the
three agents share similar high variance in mean re-
turns but differ significantly in metrics that focus on
reaching the goal, in which the Double Q-Learning
shows the most promising results.
Despite using random exploration ε in the three
agents based on Q-Learning, the results from the first
and second scenarios show that the environment and
the goal are non-trivial and unsolvable for agents per-
forming purely random actions, which reached the
goal in fewer than 1% of the cases. For that reason,
the Random Agent was excluded from the compari-
son in figures 2, 3 and 4 and in the third scenario.
The results of our experiments show that despite
the defender having full visibility of the network, a
rational attacker was still able to reach the target and
exfiltrate data. From a security perspective, this in-
dicates that the defensive tools in the network need
to be improved so as to prevent the attacker’s lateral
movement in the system.
7 CONCLUSION
In this paper, we propose a Q-Learning-based attack-
ing agent capable of performing data exfiltration.
Our results show that even though the three learn-
ing agents can find meaningful policies, Double Q-
Learning outperforms the others and provides the
most stable training. It reached the goal 70% of
the interactions while being undetected in 37%. This
shows that despite a globally present defender, a ra-
tional attacker could still reach the target.
The initial success and detection probabilities
were set based on expert knowledge, however, our re-
sults clearly show that there is room for improvement
in the detection capability of the defender. Having a
high success probability for attacker action highlights
the need for a robust defense mechanism that is capa-
ble of detecting any stealthy attacker. This provides a
foundation for studying and improving attacker tech-
niques to increase defense capability in the network.
Currently, the method is limited to small or
medium-sized networks. Although the interaction
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
448

and world representation model can be easily ex-
tended to a more complex setup in size of the network
and action space, the scalability and computational
feasibility of such extensions have yet to be evaluated.
Therefore, the natural direction for future research
is to expand our approach towards larger environ-
ments, which will require subsequent scalability test-
ing due to those complex setups. We also plan to in-
corporate other types of cyber attacks into Mitre tax-
onomy and model the defender as a rational entity
with its own set of actions in the interaction. In ad-
dition, we plan to test the performance of our agent in
a simulated environment.
Along with increasing the environmental com-
plexity, the problem of more complex goals for the
attacker is also in the pipeline resulting in the need
for more reconnaissance from the agent.
ACKNOWLEDGMENTS
The authors acknowledge support from the Re-
search Center for Informatics (CZ.02.1.01/0.0/0.0/
16 019/0000765) and Strategic Support for the De-
velopment of Security Research in the Czech Repub-
lic 2019–2025 (IMPAKT 1) program, by the Min-
istry of the Interior of the Czech Republic under No.
VJ02010020 – AI-Dojo: Multi-agent testbed for the
research and testing of AI-driven cyber security tech-
nologies.
REFERENCES
Anwar, A. H. and Kamhoua, C. A. (2022). Cyber deception
using honeypot allocation and diversity: A game theo-
retic approach. In 2022 IEEE 19th Annual Consumer
Communications & Networking Conference (CCNC).
Bonet, B. and Geffner, H. (2001). Planning as heuristic
search. Artificial Intelligence, 129(1):5–33.
Chung, K., Kamhoua, C. A., Kwiat, K. A., Kalbarczyk,
Z. T., and Iyer, R. K. (2016). Game theory with learn-
ing for cyber security monitoring. In 2016 IEEE 17th
International Symposium on High Assurance Systems
Engineering (HASE), pages 1–8.
Dehghan, M., Sadeghiyan, B., Khosravian, E., Moghad-
dam, A. S., and Nooshi, F. (2022). ProAPT: Projection
of APT Threats with Deep Reinforcement Learning.
arXiv:2209.07215 [cs].
Dra
ˇ
sar, M., Moskal, S., Yang, S., and Zat’ko, P. (2020).
Session-level adversary intent-driven cyberattack sim-
ulator. In 2020 IEEE/ACM 24th International Sympo-
sium on Distributed Simulation and Real Time Appli-
cations (DS-RT), pages 1–9.
Du, Y., Song, Z., Milani, S., Gonzales, C., and Fang, F.
(2022). Learning to play an adaptive cyber decep-
tion game. In The 13th Workshop on Optimization
and Learning in Multiagent Systems, AAMAS.
Durkota, K., Lisy, V., Kiekintveld, C., Bosansky, B., and
Pechoucek, M. (2016). Case studies of network de-
fense with attack graph games. IEEE Intelligent Sys-
tems.
ENISA (2022). ENISA threat landscape for ransomware
attacks. Technical report, ENISA, LU.
Fikes, R. E. and Nilsson, N. J. (1971). Strips: A new ap-
proach to the application of theorem proving to prob-
lem solving. Artificial Intelligence, 2(3):189–208.
Guo, M., Li, J., Neumann, A., Neumann, F., and Nguyen,
H. (2021). Practical fixed-parameter algorithms for
defending active directory style attack graphs.
Hammar, K. and Stadler, R. (2020). Finding effective se-
curity strategies through reinforcement learning and
self-play. In 2020 16th International Conference on
Network and Service Management (CNSM). IEEE.
Hasselt, H. (2010). Double q-learning. Advances in neural
information processing systems, 23.
Hou, X., Jiang, Z., and Tian, X. (2010). The detection and
prevention for arp spoofing based on snort. In 2010 In-
ternational Conference on Computer Application and
System Modeling (ICCASM 2010), volume 5, pages
V5–137–V5–139.
Huang, Y.-T., Lin, C. Y., Guo, Y.-R., Lo, K.-C., Sun, Y. S.,
and Chen, M. C. (2022). Open source intelligence for
malicious behavior discovery and interpretation. IEEE
Transactions on Dependable and Secure Computing.
Jang, B., Kim, M., Harerimana, G., and Kim, J. W. (2019a).
Q-learning algorithms: A comprehensive classifica-
tion and applications. IEEE Access.
Jang, B., Kim, M., Harerimana, G., and Kim, J. W. (2019b).
Q-learning algorithms: A comprehensive classifica-
tion and applications. IEEE access.
Liu, P., Zang, W., and Yu, M. (2005). Incentive-based mod-
eling and inference of attacker intent, objectives, and
strategies. ACM Transactions on Information and Sys-
tem Security (TISSEC), 8(1):78–118.
Mitchell, R. and Healy, B. (2018). A game theoretic
model of computer network exploitation campaigns.
In 2018 IEEE 8th Annual Computing and Communi-
cation Workshop and Conference (CCWC).
Moskal, S., Yang, S. J., and Kuhl, M. E. (2018). Cyber
threat assessment via attack scenario simulation us-
ing an integrated adversary and network modeling ap-
proach. Journal of Defense Modeling and Simulation.
Niculae, S., Dichiu, D., Yang, K., and B
¨
ack, T. (2020).
Automating penetration testing using reinforcement
learning.
Patil, A., Bharath, S., and Annigeri, N. (2018). Applica-
tions of game theory for cyber security system: A sur-
vey. International Journal of Applied Engineering Re-
search, 13(17):12987–12990.
Shiva, S., Roy, S., and Dasgupta, D. (2010). Game theory
for cyber security. In Proceedings of the Sixth Annual
Workshop on Cyber Security and Information Intelli-
gence Research, pages 1–4.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An introduction. MIT press.
Catch Me if You Can: Improving Adversaries in Cyber-Security with Q-Learning Algorithms
449
