
Trajectory Prediction in First-Person Video: Utilizing a Pre-Trained
Bird’s-Eye View Model
Masashi Hatano, Ryo Hachiuma and Hideo Saito
Graduate School of Science and Technology, Keio University, Yokohama, Japan
Keywords:
Trajectory Prediction, Egocentric Video.
Abstract:
In recent years, much attention has been paid to the prediction of pedestrian trajectories, as they are one of the
key factors for a better society, such as automatic driving, a guide for blind people, and social robots inter-
acting with humans. To tackle this task, many methods have been proposed but few are from the first-person
perspective because of the lack of a publicly available dataset. Therefore, we propose a method that uses
egocentric vision, which does not need to be trained with a first-person video dataset. We made it possible to
utilize existing methods, which predict from a bird’s-eye view. In addition, we propose a novel way to consider
semantic information without changing the shape of the input to apply to all existing bird’s-eye methods that
use only past trajectories. Therefore, there is no need to create a new dataset from egocentric vision. The ex-
perimental results demonstrate that the proposed method makes it possible to predict from an egocentric view
via existing methods of bird’s-eye view. The proposed method qualitatively improves trajectory predictions
without aggravating quantitative accracy, and the effectiveness of predicting the trajectories of multiple people
simultaneously.
1 INTRODUCTION
Although future trajectory prediction is a challenging
task, it is one of the key factors for a better society,
such as automatic driving, a guide for blind people,
and social robots interacting with humans. This task
has been attracted many researchers (Bhattacharyya
et al., 2019; Gupta et al., 2018; Sadeghian et al., 2019;
Deo and Trivedi, 2020; Lee et al., 2017; Liang et al.,
2020; Mangalam et al., 2020; Zhao et al., 2019). See
(Rudenko et al., 2020) for an overview of future tra-
jectory prediction. Various solutions from different
perspectives have been proposed; however, few have
tried to predict the future location of pedestrians from
egocentric vision because the field of egocentric fu-
ture prediction is very young and still developing, as
mentioned in (Rodin et al., 2021).
The existing methods for predicting the trajecto-
ries of pedestrians can roughly be divided into two
main categories: a third-person viewpoint or bird’s-
eye view (Alahi et al., 2016; Gupta et al., 2018; Zhang
et al., 2019; Pang et al., 2021), and the other pre-
dicts trajectories from a first-person perspective (Yagi
et al., 2018; Qiu et al., 2021; Huynh and Alagh-
band, 2020). While the former method can accurately
use past trajectories in the world coordinate system,
which are the most important information for future
trajectories, as inputs, it cannot use detailed informa-
tion such as a pedestrian’s posture state. In addition,
the former method is, in fact, impractical in terms
of the ubiquitousness and availability of surveillance
cameras, which provide images from the third-person
perspective. The latter method can use detailed in-
formation such as human poses; however, models
predicting trajectories from a first-person perspective
must be trained with an egocentric vision dataset. To
the best of our knowledge, there are few publicly
available datasets of trajectory predictions from ego-
centric vision as first-person video contains private in-
formation such as pedestrians’ faces. In our work, we
made it possible to utilize existing methods of bird’s-
eye coordinates to apply to the egocentric view, which
does not require the creation of a dataset or training
model.
Moreover, none of the previous work (Liang et al.,
2019; Kosaraju et al., 2019; Sadeghian et al., 2019;
Salzmann et al., 2020) tried to change the shape of
the input to adapt to the model structure. Researchers
changed the structure of the model instead, as it is
easy to extract information and integrate it with the
prediction model. Nonetheless, this method of con-
sidering semantic information requires training with
a dataset. There is a publicly available dataset for
bird’s-eye coordinate models; therefore, the segmen-
624
Hatano, M., Hachiuma, R. and Saito, H.
Trajectory Prediction in First-Person Video: Utilizing a Pre-Trained Bird’s-Eye View Model.
DOI: 10.5220/0011683300003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
624-630
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

tation prediction model can be obtained without a
problem. In contrast, the model from egocentric vi-
sion has a problem in terms of the dataset. We ad-
dressed this issue by proposing a novel method of
considering semantic information that transforms the
boundary information, obtained from the first-person
viewpoint image, into the same shape as the inputs
of the existing model, predicting from a bird’s-eye
view. This leads to unnecessary training with the
dataset from a first-person perspective, but it enhances
the prediction qualitatively while maintaining quanti-
tative accuracy.
To demonstrate the effectiveness of the proposed
method, three main comparisons were conducted.
The first compares prediction accuracy with and with-
out the homographic transformation, the second is a
comparison with and without the terrain information,
and the third comparison is for with and without using
SP (Social Pooling). Regarding the socially accept-
able predictor to make these comparisons, the pre-
trained model of SocialGAN (Gupta et al., 2018) was
used.
In this paper, there are mainly three contributions.
• We made it possible to apply existing methods
that use bird’s-eye coordinates as input to make
forecast them from a first-person viewpoint. We
can benefit from multi-person prediction from ex-
isting methods that considers human-interaction.
• We came up with a novel way of taking semantic
information into account, which applies to all so-
cially acceptable trajectory predictors, using only
the past trajectory, resulting in qualitatively im-
proving the trajectory prediction.
• We realized the proposed method without training
and fine-tuning with an egocentric vision dataset.
2 RELATED WORK
Trajectory prediction can be used for a variety of pur-
poses. One is Autonomous driving. Autonomous
driving must predict the trajectories of pedestrians to
avoid colliding with them. Recently researchers (Cai
et al., 2022; Rasouli et al., 2019; Marchetti et al.,
2020; Poibrenski et al., 2020; Makansi et al., 2020)
have been tackling this issue, and most methods pre-
dict from a driving car’s camera as they would like to
apply the methods to intelligent driving. In this do-
main, a significant number of approaches have been
introduced, as many publicly available datasets have
been provided. In contrast, in this paper, we fo-
cus on predicting from a head-mounted camera of
a pedestrian because the objective is to apply to as-
sistive technologies and social robots that interact
with human. This task, which we would like to ad-
dress, is much more challenging than the one in au-
tonomous driving because few public datasets are pro-
vided, and head-mounted cameras are unsteady com-
pared to driving cameras.
Turning to human trajectory prediction from the
first-person viewpoint, few researchers (Yagi et al.,
2018; Qiu et al., 2021; Huynh and Alaghband, 2020)
have addressed this problem, which aims at socially
acceptable and efficient trajectory navigation. future
person localization (FPL) (Yagi et al., 2018) is the
first work to predict the future locations of people (not
the camera-wearer) in egocentric videos from wear-
able cameras. Then, indoor future person localization
(IFPL) (Qiu et al., 2021), which is the latest work in
this task, was introduced to adapt for indoor scenes.
Both methods take detailed information such as hu-
man body pose into account and predict points of fu-
ture locations or the entire bounding box for pedestri-
ans. Training an end-to-end model for trajectory pre-
diction from an egocentric view is difficult due to the
lack of a dataset. Both sets of authors created datasets
and provide them on request, but these datasets are
less diverse in terms of scene diversity and scale than
existing datasets in areas such as automated driving.
However, the proposed method solves these issues by
performing coordinate transformations using homog-
raphy. This transformation enables us to use existing
methods, with only the past trajectory from a bird’s-
eye viewpoint; therefore, there is no need to train a
model with first-person videos, which creates privacy
issues.
Many more researchers have been attracted by
predicting from a third-person viewpoint or bird’s-
eye viewpoint. The approach can be divided into
two types: using rich information such as a semantic
map of the image (Liang et al., 2019; Kosaraju et al.,
2019; Sadeghian et al., 2019; Salzmann et al., 2020)
and using only the past trajectory (Gupta et al., 2018;
Alahi et al., 2016; Pang et al., 2021; Amirian et al.,
2019; Choi and Dariush, 2019; Zhang et al., 2019;
Katyal et al., 2020). Most of the previous work uses
LSTM-based (Hochreiter and Schmidhuber, 1997) or
Generative Adversarial Network-based (Goodfellow
et al., 2014) models. Using a third-person or bird’s-
eye viewpoint is helpful as they provide accurate past
trajectories in world coordinates without missing in-
formation caused by the occlusion. Nevertheless, they
are impractical due to the availability and ubiquitous-
ness of bird’s-eye viewpoint videos. In contrast, al-
though the proposed method is based on these third-
person viewpoint predictors, it predicts from an ego-
centric view; therefore it is, in fact, practical. As for
Trajectory Prediction in First-Person Video: Utilizing a Pre-Trained Bird’s-Eye View Model
625

the consideration of semantic information, we devel-
oped the novel idea of considering boundary informa-
tion.
3 METHOD
3.1 Problem Formulation
Let p
t
i
∈ R
2
denote the position of pedestrian i at
time t in a single image frame where there are
n pedestrians in total. The past trajectory of a
pedestrian i is p
i
=
{
p
t
i
, t = 1, 2, ..., t
past
}
, and P =
{
p
i
, i = 1, 2, ..., n
}
represents the past trajectories of
all pedestrians in a scene. Similar to this represen-
tation, the future trajectory of pedestrian i at time
t is denoted as q
t
i
. q
i
=
q
t
i
, t = t
past
+ 1, ..., t
pred
and Q =
{
q
i
, i = 1, 2, ..., n
}
represent the future trajec-
tory of pedestrian i and all future trajectories, respec-
tively. In addition, ˆq
i
=
n
ˆ
q
t
i
, t = t
past
+ 1, ..., t
pred
o
and
ˆ
Q =
{
ˆq
i
, i = 1, 2, ..., n
}
denote the estimated fu-
ture trajectory of pedestrian i and all estimated fu-
ture trajectories in a scene with the existing socially
acceptable trajectory prediction model f
θ
, using only
the past trajectories of all pedestrians:
ˆ
Q = f
θ
(P), (1)
where θ is the parameters of a pre-trained trajectory
prediction model. In this work, θ remains unchanged.
In addition, e
t
i
∈ R
2
denotes the position of a fic-
titious pedestrian (defined in Section 3.3) i at time t,
which is the position of an extracted point depicted in
a blue rectangle in Figure 1. The past trajectory of a
fictitious pedestrian i is e
i
=
{
e
t
i
, t = 1, 2, ..., t
past
}
and
E =
{
e
i
, i = 1, 2, ..., m
}
represents the past trajectories
of all fictitious pedestrians in a scene where there are
m extracted points in total. As the fictitious pedestri-
ans are assumed to be at a standstill, the well-formed
formula
∀i, ∃c ∈ R
2
, ∀t, e
t
i
= c, (2)
is established, where c is a two-dimensional bird’s-
eye coordinate. Then, the estimated future trajectories
that consider semantic segmentation information are
ˆ
Q = f
θ
(P, E) . (3)
In the following section, we detail the part of co-
ordinate transformation and boundary extraction via
a semantic segmentation map. As our objective is
to utilize an existing pre-trained model without ad-
ditional training because of the lack of first-person
videos for trajectory prediction, the explanation of the
trajectory prediction model is not given.
3.2 Coordinate Transformation
Transforming the coordinates is important in the pro-
posed method because existing methods, which use
bird’s-eye coordinates, cannot be applied to infer
from the first-person perspective without this technol-
ogy, as proved in Section 4.2. One of the advantages
of using methods that predict from the world coordi-
nate system is that past trajectories are well consid-
ered.
Coordinate transformation is applied to pedestri-
ans’ foot coordinates and the extracted points using
semantic segmentation, as shown in Figure 1. As
can be seen in Figure 1, for each image frame, ob-
ject detection (Carion et al., 2020; Redmon et al.,
2016) is applied to detect the pedestrians in the im-
age, and then the center of the two bottom corners of
the bounding box is regarded as each detected per-
son’s foot coordinate in the screen coordinate system.
After the screen coordinates are found, Equation 4 is
applied to transform the coordinates from an image
screen system to a world system:
[R|t]
−1
K
−1
u
v
1
=
X
Y
Z
, (4)
where K is the intrinsic matrix of the camera, R is the
rotation matrix, t is the translation vector, u and v are
two-dimensional coordinates in the image, and X , Y,
and Z are three-dimensional coordinates in the world.
The height, Y, in the world coordinate system is un-
necessary for the input data as we use the trajectory
predictor, forecasting from a bird’s-eye view.
By performing this transformation for each image
frame with the corresponding camera parameters, the
input data for trajectory prediction is prepared. In the
same way, the extracted points, which are detailed in
Section 3.3, are also transformed to bird’s-eye coordi-
nates. This is done every d frame, unlike the detected
pedestrians, as a single image provides boundary in-
formation within 15 m from the camera-wearer.
3.3 Boundary Extraction
Normally, semantic segmentation (Xie et al., 2021;
Yuan et al., 2020) is integrated with the prediction
module when the semantic information should be
considered; however, in the proposed method, seman-
tic information is obtained by converting the inference
results of semantic segmentation to the same input as
the trajectory predictor. This is shown in Figure 2.
This aims to avoid pedestrians’ trajectories from be-
ing in inappropriate areas such as outside the road or
on the wall. To do that, we regarded extracted bound-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
626
Coordinate
Transformation
Center(left bottom, right bottom)
Bird’s-eye view
every frame
SS model
Boundary Extraction
Binarization
+
Coordinate
Transformation
every d frames
Trajectory
Prediction
Model
Inverse
Coordinate
Transformation
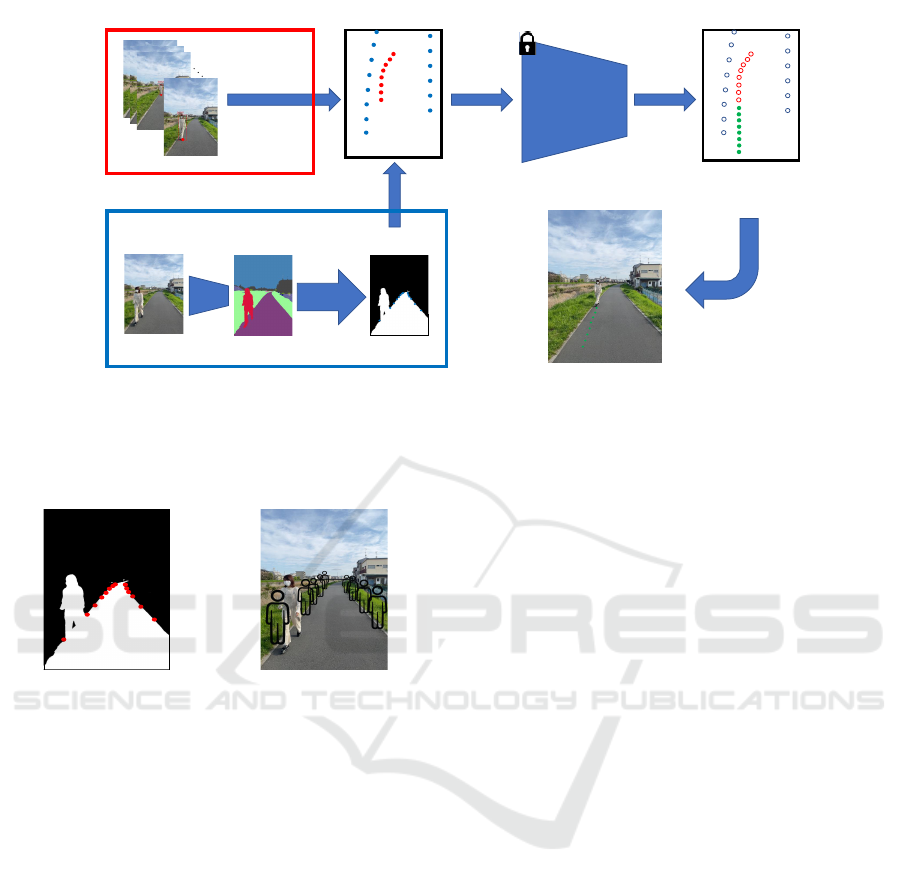
Figure 1: An overview of the proposed method for a single agent. The part surrounded by a red rectangle at the top left of
the image shows how to transform the human past trajectories into bird’s-eye coordinates. The part surrounded by a blue
rectangle at the bottom left of the image shows how the border information is transformed and compressed to the bird’s-eye
coordinates in the proposed method. (SS stands for semantic segmentation).
Figure 2: The concept of the proposed consideration of
boundary information. The boundary information is ob-
tained by regarding each extracted point as a standing ficti-
tious pedestrian.
ary points, which are between inappropriate areas or
not, as standing pedestrians. We call them fictitious
pedestrians because there are no pedestrians on the
boundary in the real world. As the existing trajectory
predictor we used considers the avoidance of collision
between pedestrians, the predicted trajectories will be
in the appropriate area by using these fictitious stand-
ing pedestrians.
As can be seen in the blue rectangle in Figure
1, a first-person view image goes through semantic
segmentation neural networks to be segmented into
several classes, including roads and sidewalks. Af-
ter obtaining the semantic segmented image, a mask
image, with which it is determined whether the class
is a walkable area or not, is generated. In our case,
road and sidewalk classes are walkable areas, and the
others are unwalkable areas. Then, many points of
the boundary between prohibited and permitted areas
are extracted from the masked image, and each point
is transformed into the world coordinate system and
given a specific identification number. In this way,
boundary information is transformed into the same
shape as the input of simple trajectory predictors such
as SocialGAN.
As the trajectory prediction method, we used the
same method as SocialGAN: 3.2 s for observation and
the same amount of time for future prediction. A one-
time step is defined as 0.4 s; therefore, there are eight
time steps for observation and prediction, resulting in
the need for 16 time steps to evaluate the predicted
trajectory.
4 EXPERIMENTS
4.1 Overview
To prove the effectiveness of the proposed method, we
compared the prediction accuracy with and without
coordinate transformation, with and without consider-
ation of boundary information, and with and without
consideration of social interaction. The first and third
comparisons were made with the metrics of two ma-
jor trajectory prediction accuracy: average displace-
ment error (ADE) and final displacement error (FDE),
whereas the second comparison was made with the
number of times that a pedestrian goes in a prohibited
area, as well as the two distance metrics.
For the dataset to perform these experiments, we
collected it ourselves, using an application that pro-
vides image sequence and camera parameters via
Trajectory Prediction in First-Person Video: Utilizing a Pre-Trained Bird’s-Eye View Model
627

Naive SocialGAN
Ground Truth
SocialGAN
Figure 3: Qualitative results of trajectory predictions with
and without coordinate transformation.
ARKit
1
. The dataset has a variety of scenes in terms
of the number of pedestrians and the type of prohib-
ited area around pedestrians, such as bushes next to
roads or buildings walls. This dataset contains 10 dif-
ferent scenes and around 100 input sequences in total.
4.2 Necessity of Coordinate
Transformation
To accurately transform the coordinates from the
screen system, to the world system, we utilized the in-
trinsic and external matrices provided by ARKit. As
shown in (Seiskari et al., 2022), the performance of
ARKit is comparable to the state of the art; thus, it
enables us to get precise camera parameters. How-
ever, even if ARKit provides precise intrinsic, rota-
tion, and translation matrices, it is difficult to get the
exact world coordinates at points that are far from the
camera-wearer. The transformation becomes worse
and less accurate when the object points are more than
15 m from the camera-wearer. Although ARKit has
this problem, which has a negative effect on the in-
put data for trajectory prediction, the transformation
is almost perfect if we use object points within 15 m
of the camera.
To make this comparison, the difference is two-
dimensional coordinates of input, and there are no
differences in terms of the model or dataset. For the
non-coordinate transformation, the pedestrian’s foot
coordinate in the image frame was used as the input
for the trajectory predictor. The results are summa-
rized in Table 1, and qualitative results are shown in
Figure 3.
As Table 1 indicates, the average and final errors
are huge if we do not apply the coordinate transfor-
mation. The trajectory prediction without coordinate
transformation is inconsistent because the sequence
of two-dimensional coordinates also lacks consis-
tency, as can be seen in Figure 3. Each coordinate
in the image depends on where the camera-wearer is
and which direction the camera faces. In this sense,
coordinate transformation, from the screen coordinate
system to the world coordinate system, helps to main-
1
url:https://developer.apple.com/documentation/arkit/
Ours
Ground Truth
SocialGAN
Figure 4: Qualitative results of trajectory predictions with
and without the addition of fictitious pedestrians that are on
the boundaries between appropriate and inappropriate ar-
eas.
tain consistency between image frames, as the world
coordinates are independent of the translation or rota-
tion matrices of the camera.
4.3 Effectiveness of Distributing
Fictitious Pedestrians
Similar to the previous experiment, the comparison
between with and without using boundary informa-
tion was performed in the same environment except
for the input of the trajectory predictor. The input
with and without the boundary information has the
same input in terms of real pedestrians, but the for-
mer input contains the world coordinates of fictitious
pedestrians as well as those of non-fictitious pedestri-
ans. The results are summarized in Table 1, in which
how many times pedestrians were predicted to pene-
trate prohibited areas (we call the percentage of this
figure “area error”) is shown in addition to the quan-
titative metrics, and qualitative results are shown in
Figure 4.
As can be seen in Table 2, both quantitative met-
rics, ADE and FDE, are neither improved nor de-
graded; however, the area score is substantially en-
hanced with the addition of the boundary informa-
tion to the input. It helps reduce the number of times
pedestrians are forecast to be in the inappropriate area
by half.
4.4 Effectiveness of Predicting Multiple
Pedestrians Simultaneously
To show the effectiveness of considering multiple
pedestrians at once, we compared between with and
without social pooling in the prediction model. As
can be seen in Table 1, ADE and FDE are improved if
we consider the social interaction in a scene at once.
In addition, as shown in Figure 5, the model that
considers social interaction improves trajectory pre-
diction qualitatively: A collision can be observed if
we do not use social pooling. Social pooling was in-
vented several years ago; however, most of the previ-
ous work of first-person perspective (Yagi et al., 2018;
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
628
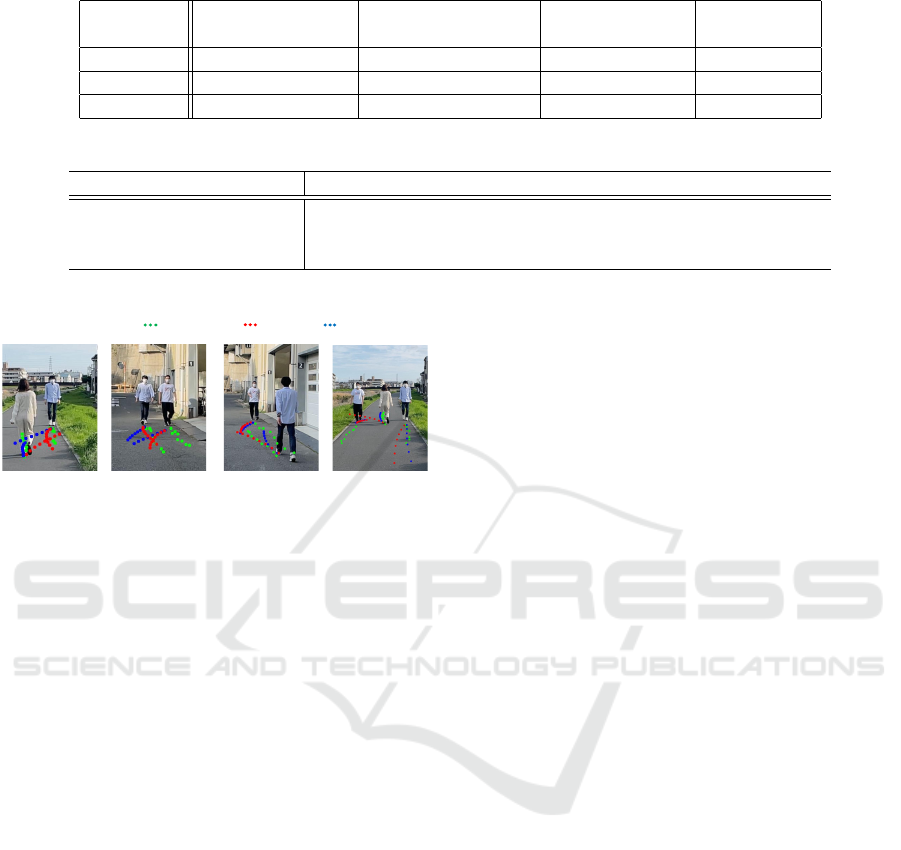
Table 1: Results for the comparison in terms of three metrics: ADE, FDE, and area error.
Naive Social-
GAN
SocialGAN w/o SP SocialGAN(Gupta
et al., 2018)
Ours
ADE 27.22 10.65 9.07 8.93
FDE 50.08 13.12 9.34 9.33
area error - - 0.417 0.202
Table 2: Comparison of the techniques for each method.
Naive SocialGAN SocialGAN w/o SP SocialGAN Ours
Coordinate transformation ✓ ✓ ✓
Social pooling ✓ ✓
Boundary information ✓
SocialGAN w/o SP
Ground Truth
SocialGAN
Figure 5: Qualitative results for trajectory predictions with
and without social pooling.
Qiu et al., 2021) does not consider social interaction
because they created the dataset on their own. How-
ever, the annotation was done by only one pedestrian
in a scene, even if there are several pedestrians. In
this sense, the proposed method, which utilizes exist-
ing methods, is much less expensive in terms of cost,
as we realized multiple pedestrians prediction without
high annotation costs.
5 CONCLUSIONS
In this work, we present a method that takes egocen-
tric view video as input but applies the existing pro-
cess, predicting from a bird’s-eye coordinate to avoid
being hindered by privacy issues and to utilize the cur-
rent fairly good predictors. This approach improves
the drawbacks of the first and third-person perspec-
tives: the huge cost of creating an egocentric vision
dataset, and the lack of ubiquitousness and availabil-
ity of surveillance cameras, respectively. Moreover,
we propose a novel method for considering boundary
information, resulting in reducing the percentage of
predictions that pedestrians will be in an inappropri-
ate area by half. In addition, our method can predict
multiple pedestrians at once from the first-person per-
spective, leading to better prediction accuracy and the
avoidance of collisions among pedestrians.
REFERENCES
Alahi, A., Goel, K., Ramanathan, V., Robicquet, A., Fei-
Fei, L., and Savarese, S. (2016). Social lstm: Human
trajectory prediction in crowded spaces. In 2016 IEEE
Conference on Computer Vision and Pattern Recogni-
tion.
Amirian, J., Hayet, J.-B., and Pettr
´
e, J. (2019). Social ways:
Learning multi-modal distributions of pedestrian tra-
jectories with gans. In 2019 IEEE/CVF Conference on
Computer Vision and Pattern Recognition Workshops.
Bhattacharyya, A., Hanselmann, M., Fritz, M., Schiele, B.,
and Straehle, C.-N. (2019). Conditional flow vari-
ational autoencoders for structured sequence predic-
tion. arXiv.
Cai, Y., Dai, L., Wang, H., Chen, L., Li, Y., Sotelo, M. A.,
and Li, Z. (2022). Pedestrian motion trajectory pre-
diction in intelligent driving from far shot first-person
perspective video. IEEE Transactions on Intelligent
Transportation Systems, 23(6):5298–5313.
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., and Zagoruyko, S. (2020). End-to-end object de-
tection with transformers. In 2020 European Confer-
ence on Computer Vision.
Choi, C. and Dariush, B. (2019). Learning to infer relations
for future trajectory forecast. In 2019 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
Workshops.
Deo, N. and Trivedi, M. M. (2020). Trajectory forecasts
in unknown environments conditioned on grid-based
plans. arXiv.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. Advances
in neural information processing systems, 27.
Gupta, A., Johnson, J., Fei-Fei, L., Savarese, S., and Alahi,
A. (2018). Social gan: Socially acceptable trajecto-
ries with generative adversarial networks. In 2018
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Trajectory Prediction in First-Person Video: Utilizing a Pre-Trained Bird’s-Eye View Model
629

Huynh, M. and Alaghband, G. (2020). AOL: adaptive on-
line learning for human trajectory prediction in dy-
namic video scenes. In 31st British Machine Vision
Conference 2020.
Katyal, K. D., Hager, G. D., and Huang, C.-M. (2020).
Intent-aware pedestrian prediction for adaptive crowd
navigation. In 2020 IEEE International Conference
on Robotics and Automation.
Kosaraju, V., Sadeghian, A., Mart
´
ın-Mart
´
ın, R., Reid, I.,
Rezatofighi, H., and Savarese, S. (2019). Social-bigat:
Multimodal trajectory forecasting using bicycle-gan
and graph attention networks. In Advances in Neural
Information Processing Systems, volume 32. Curran
Associates, Inc.
Lee, N., Choi, W., Vernaza, P., Choy, C. B., Torr, P. H. S.,
and Chandraker, M. (2017). Desire: Distant future
prediction in dynamic scenes with interacting agents.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition.
Liang, J., Jiang, L., and Hauptmann, A. (2020). Simaug:
Learning robust representations from simulation for
trajectory prediction. In 2020 European Conference
on Computer Vision, Cham. Springer International
Publishing.
Liang, J., Jiang, L., Niebles, J. C., Hauptmann, A. G., and
Fei-Fei, L. (2019). Peeking into the future: Predict-
ing future person activities and locations in videos. In
2019 IEEE/CVF Conference on Computer Vision and
Pattern Recognition.
Makansi, O., Cicek, O., Buchicchio, K., and Brox, T.
(2020). Multimodal future localization and emergence
prediction for objects in egocentric view with a reach-
ability prior. In Proceedings of the IEEE/CVF Confer-
ence on Computer Vision and Pattern Recognition.
Mangalam, K., Girase, H., Agarwal, S., Lee, K.-H., Adeli,
E., Malik, J., and Gaidon, A. (2020). It is not the
journey but the destination: Endpoint conditioned tra-
jectory prediction. In 2020 European Conference on
Computer Vision, Cham. Springer International Pub-
lishing.
Marchetti, F., Becattini, F., Seidenari, L., and Del Bimbo,
A. (2020). Multiple trajectory prediction of mov-
ing agents with memory augmented networks. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence.
Pang, B., Zhao, T., Xie, X., and Wu, Y. N. (2021). Trajec-
tory prediction with latent belief energy-based model.
In 2021 IEEE/CVF Conference on Computer Vision
and Pattern Recognition.
Poibrenski, A., Klusch, M., Vozniak, I., and M
¨
uller, C.
(2020). M2P3: Multimodal Multi-Pedestrian Path
Prediction by Self-Driving Cars with Egocentric Vi-
sion, page 190–197. Association for Computing Ma-
chinery, New York, NY, USA.
Qiu, J., Lo, F. P.-W., Gu, X., Sun, Y., Jiang, S., and Lo, B.
(2021). Indoor future person localization from an ego-
centric wearable camera. In 2021 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems.
Rasouli, A., Kotseruba, I., Kunic, T., and Tsotsos, J. (2019).
Pie: A large-scale dataset and models for pedestrian
intention estimation and trajectory prediction. In 2019
IEEE/CVF International Conference on Computer Vi-
sion.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In 2016 IEEE Conference on Computer
Vision and Pattern Recognition.
Rodin, I., Furnari, A., Mavroeidis, D., and Farinella, G. M.
(2021). Predicting the future from first person (ego-
centric) vision: A survey. Computer Vision and Image
Understanding, 211:103252.
Rudenko, A., Palmieri, L., Herman, M., Kitani, K. M.,
Gavrila, D. M., and Arras, K. O. (2020). Human mo-
tion trajectory prediction: a survey. The International
Journal of Robotics Research, 39(8):895–935.
Sadeghian, A., Kosaraju, V., Sadeghian, A., Hirose, N.,
Rezatofighi, H., and Savarese, S. (2019). Sophie: An
attentive gan for predicting paths compliant to social
and physical constraints. In 2019 IEEE/CVF Confer-
ence on Computer Vision and Pattern Recognition.
Salzmann, T., Ivanovic, B., Chakravarty, P., and Pavone,
M. (2020). Trajectron++: Dynamically-feasible tra-
jectory forecasting with heterogeneous data. In 2020
European Conference on Computer Vision, Cham.
Springer International Publishing.
Seiskari, O., Rantalankila, P., Kannala, J., Ylilammi, J.,
Rahtu, E., and Solin, A. (2022). Hybvio: Pushing the
limits of real-time visual-inertial odometry. In Pro-
ceedings of the IEEE/CVF Winter Conference on Ap-
plications of Computer Vision.
Xie, E., Wang, W., Yu, Z., Anandkumar, A., Alvarez, J. M.,
and Luo, P. (2021). Segformer: Simple and efficient
design for semantic segmentation with transformers.
In Advances in Neural Information Processing Sys-
tems, volume 34.
Yagi, T., Mangalam, K., Yonetani, R., and Sato, Y. (2018).
Future person localization in first-person videos. In
2018 IEEE/CVF Conference on Computer Vision and
Pattern Recognition.
Yuan, Y., Chen, X., and Wang, J. (2020). Object-contextual
representations for semantic segmentation. In 2020
European Conference on Computer Vision.
Zhang, P., Ouyang, W., Zhang, P., Xue, J., and Zheng, N.
(2019). Sr-lstm: State refinement for lstm towards
pedestrian trajectory prediction. In 2019 IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion.
Zhao, T., Xu, Y., Monfort, M., Choi, W., Baker, C., Zhao,
Y., Wang, Y., and Wu, Y. N. (2019). Multi-agent ten-
sor fusion for contextual trajectory prediction. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
630
