
Self-Modularized Transformer:
Learn to Modularize Networks for Systematic Generalization
Yuichi Kamata
1
, Moyuru Yamada
1
and Takayuki Okatani
2
1
Fujitsu Ltd., Kawasaki, Kanagawa, Japan
2
Graduate School of Information Sciences, Tohoku University, Sendai, Japan
Keywords:
Neural Module Network, Systematic Generalization, Visual Question Answering.
Abstract:
Visual Question Answering (VQA) is a task of answering questions about images that fundamentally requires
systematic generalization capabilities, i.e., handling novel combinations of known visual attributes (e.g., color
and shape) or visual sub-tasks (e.g., FILTER and COUNT). Recent researches report that Neural Module Net-
works (NMNs), which compose modules that tackle sub-tasks with a given layout, are a promising approach
for the systematic generalization in VQA. However, their performance heavily relies on the human-designed
sub-tasks and their layout. Despite being crucial for training, most datasets do not contain these annotations.
Self-Modularized Transformer (SMT), a novel Transformer-based NMN that concurrently learns to decom-
pose the question into the sub-tasks and compose modules without such annotations, is proposed to overcome
this important limitation of NMNs. SMT outperforms the state-of-the-art NMNs and multi-modal Transform-
ers for the systematic generalization to the novel combinations of the sub-tasks in VQA.
1 INTRODUCTION
Recent studies suggest that systematic generaliza-
tion remains challenging for state-of-the-art neural
network models. Systematic generalization is the
ability to generalize novel compositions of known
concepts beyond the training distribution (Lake and
Baroni, 2018; Bahdanau et al., 2019; Ruis et al.,
2020). Even successful models for in-distribution,
e.g., Transformer (Vaswani et al., 2017), largely de-
grades the performance for systematic generalization
(Yamada et al., 2022; Bergen et al., 2021).
Visual Question Answering (VQA) (Antol et al.,
2015) is the task of answering questions about im-
ages. The core of VQA is complex visual reasoning,
a composition of sub-tasks, e.g., FIND, FILTER, and
COUNT. This compositional structure yields a distri-
bution of image-question pairs of combinatorial size,
training data cannot fully capture. Thus, VQA funda-
mentally requires systematic generalization capabili-
ties.
Neural Module Networks (NMNs) show promis-
ing performance for systematic generalization in
VQA (Johnson et al., 2017a; Bahdanau et al., 2020;
D’Amario et al., 2021). NMNs decompose a ques-
tion in VQA into sub-tasks, and each sub-task is tack-
led with a shallow neural network called a module.
NMNs take a sequence of sub-tasks, i.e., a layout
of the sub-tasks, as an input instead of the question.
NMNs alleviate the gap between in-distribution gen-
eralization and systematic generalization.
The performance of NMNs, however, signifi-
cantly depends on the human-designed sub-tasks and
their layouts (equivalently, programs), i.e., how to de-
sign a library of modules that covers all questions in
a target dataset and how to compose them to pro-
vide correct answers to the questions. These anno-
tations are essential to training the NMNs but are not
included in most datasets such as VQA v2.0 (Goyal
et al., 2017). A program generator can also be used
to convert the questions into the programs in the
test phase (Johnson et al., 2017b), but the program–
question pairs are needed to train it. Due to these cru-
cial limitations, NMNs cannot apply their excellent
systematic generalization capabilities to the datasets
that do not contain the programs.
In this paper, to eliminate the above limitations of
NMNs, we propose a novel Transformer-based NMN
called the Self-Modularized Transformer (SMT) that
simultaneously learns to decompose the question into
the sub-tasks and compose modules without the pro-
gram. This is a significant challenge because the net-
work must determine if the modules, their composi-
tion, or both are incorrect from an error between the
predicted and actual answer. Two losses are intro-
duced to facilitate them. SMT outperforms the state-
Kamata, Y., Yamada, M. and Okatani, T.
Self-Modularized Transformer: Learn to Modularize Networks for Systematic Generalization.
DOI: 10.5220/0011682100003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
599-606
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
599

of-the-art NMNs and multi-modal Transformers for
the systematic generalization to the novel combina-
tions of the sub-tasks in VQA.
2 RELATED WORK
Neural Module Networks (NMNs) (Andreas et al.,
2016b) are commonly used to solve complex vi-
sual reasoning tasks such as CLEVR (Johnson et al.,
2017a). NMNs decompose a question into a sequence
of sub-tasks (i.e., program). With ground truth (GT)
programs NMNs have solved CLEVR perfectly (Yi
et al., 2018; Shi et al., 2019). Program generator (An-
dreas et al., 2016a; Yi et al., 2018; Akula et al., 2021),
which infers a program from a question, is proposed
to apply the NMNs to the questions for which the GT
programs are not provided. However, the question
and GT program pairs are required to train the pro-
gram generator.
Stack-NMN (Hu et al., 2018) detects weights of
applicability for each module, and similar to our ap-
proach it learns the soft weights to select modules.
While Stack-NMN implements modules specialized
to the sub-tasks defined in CLEVR, we use larger
modules consisting of Transformer blocks to realize
flexible acquisition of sub-tasks through the training
process without pre-defining them.
Multi-modal Transformers (Lu et al., 2019; Ka-
math et al., 2021; Tan and Bansal, 2019) are re-
cent successful models on vision and language tasks
(Goyal et al., 2017; Hudson and Manning, 2019; Yu
et al., 2016), coupled with the effect of pretraining
with large amounts of data (Krishna et al., 2017;
Sharma et al., 2018), and are reported with high ac-
curacy on CLEVR without using any GT programs
as well (Kamath et al., 2021). The architecture of
Transformer is also adopted for the program generator
for NMNs (Chen et al., 2021). We use Transformer
blocks to build modules for each sub-task.
The CLOSURE dataset (Bahdanau et al., 2020)
provides novel combinations of sub-tasks in the
CLEVR dataset. The authors of CLOSURE have also
proposed Vector-NMN. Vector-NMN outperforms all
the previous NMNs and achieves promising perfor-
mance for systematic generalization with GT pro-
grams. Recently, some NMNs under the condition of
using GT programs (Bahdanau et al., 2020; Yamada
et al., 2022) or program generator (Akula et al., 2021)
have improved the performance on CLOSURE. How-
ever, they still rely on the GT programs to train the
model or program generator, unlike our approach.
3 APPROACH
In this section, we introduce Self-Modularized Trans-
former (SMT) that consists of a set of Transformer
modules and a controller network to select the mod-
ules for the sub-task at each layer.
3.1 Architecture
Figure 1 depicts an overview of SMT, which is com-
posed of Transformer blocks as modules. We de-
sign this architecture based on the preliminary exper-
imental results (see Sec. 4.5). Conventional L-layer
Transformer models stack L Transformer blocks se-
quentially, while our M-module SMT arranges all M
Transformer blocks in parallel and uses that set of
modules repeatedly to stack L layers (i.e., all Trans-
former blocks operate their sub-tasks L times). Trans-
former modules at l-th layer receive as their input
the output of the previous layer S
l−1
and produce a
weighted summation of each module’s output S
l
m
:
S
l
m
= Transformer
m
(S
l−1
),
S
l
=
M
∑
m=1
w
l
m
· S
l
m
,
(1)
where w
l
m
is a weight for the output of the m-th mod-
ule at l-th layer.
Following the approach of conventional vision
and language Transformers (Lu et al., 2019; Li et al.,
2020), the image features f = { f
(1)
,··· , f
(O)
} and
regional positions r = {r
(1)
,··· ,r
(O)
} of the O ob-
jects extracted by the object detector are embedded
by each of the linear layers FC
I
and FC
R
, and they
are summed up to create a sequence of object features
with a layer normalization:
V = LayerNorm(FC
I
( f ) + FC
R
(r)). (2)
Also, a sequence of question embeddings Q is cre-
ated by converting W tokens of question sentences
q = {q
(1)
,··· ,q
(W )
} with the embedding layer E
w
and
adding the positional embeddings. In addition, the
question sentence q is fed into a dependency parser
to obtain dependency tags and dependency heads for
each word in the sentences as shown in Figure 2.
The dependency tag is converted to embeddings T =
{T
(1)
,··· ,T
(W )
}, and is added to question embeddings
Q to obtain extended question embeddings:
Q
ex
= LayerNorm(Q + T ). (3)
The dependency heads are transformed to a matrix
A
head
that aligns attention masks for the Transformer
modules such that only a single phrase of dependency
parsing is present sequentially for the modules of each
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
600
Transformer 1
+
w
1
1
...
w
1
2
w
1
M
Layer 1
Transformer 2
Transformer M
There is another cube that is the same size
as the brown cube; what is its color?
Dependency
Parsing
Dependency tag
embeddings
Dependency
head matrix (A
head
)
Add & Norm. Concatenate
...
Transformer 1
+
w
L
1
...
w
L
2
w
L
M
Layer L
Transformer 2
Transformer M
Answer
MLP
head
MLP
ctrl
MLP
ctrl
V
Q
ex
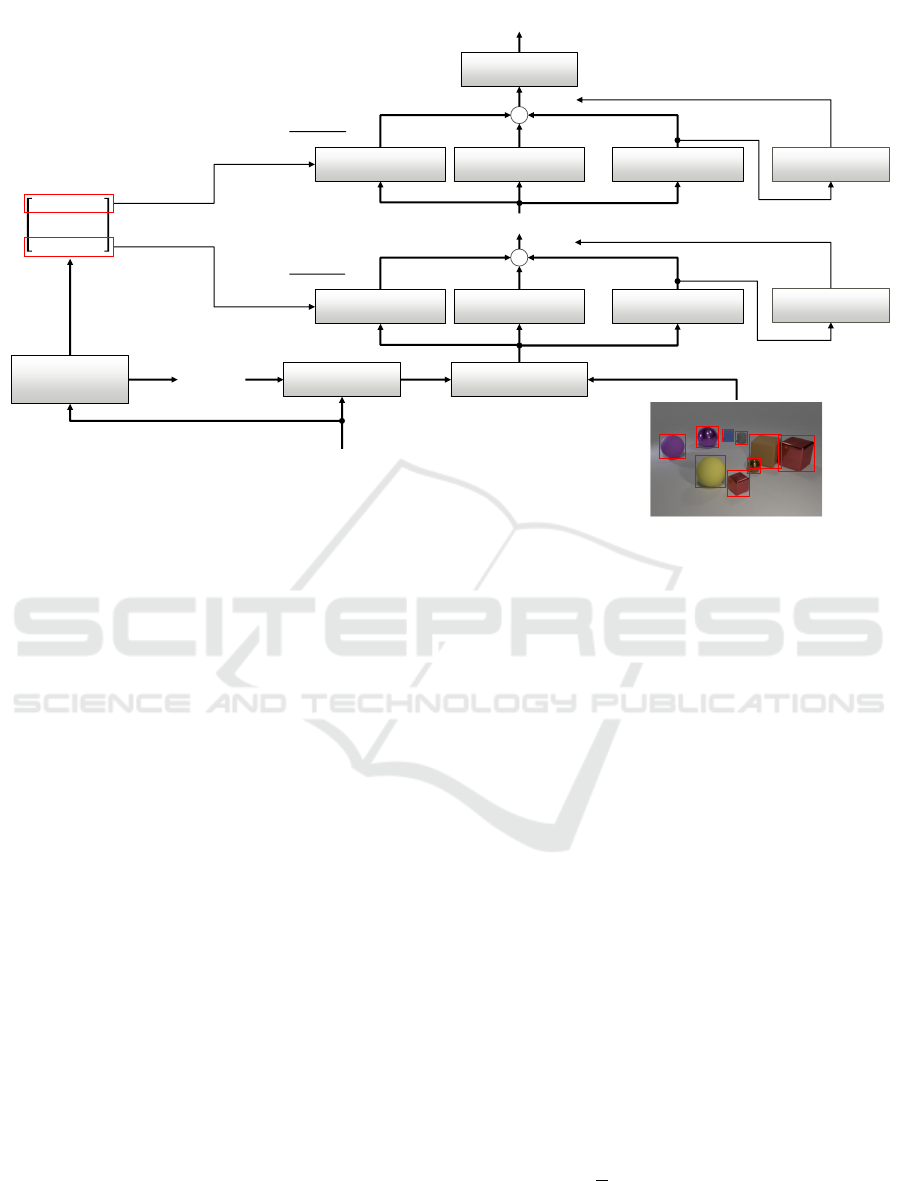
Figure 1: Overview of Self-Modularized Transformer (SMT). It takes an image and a question as the input and outputs the
answer by selecting one from predefined candidates. All Transformer modules are aligned in parallel, and that set of modules
is stacked in L layers repeatedly. A dependency parser divides the question into sentences for the modules. Selections of the
modules are determined by a controller network (MLP
ctrl
).
layer. For example, in the case of the question sen-
tence q = {There is another cube that ···}, the atten-
tion mask at the position of layer 1 of [1 1 0 1 0 ···]
indicates the phrase “There is cube” as hard atten-
tion to each word in the question. To keep the model
size (i.e., the number of layers) the same in the whole
dataset, every row of the dependency head matrix
A
head
which exceeds the number of the phrase is
padded with the attention mask of the language to-
kens set to zero.
We add embeddings of special tokens to the
head and tail of the object embeddings V and the
extended question embeddings Q
ex
(i.e, tokens of
⟨BOS⟩, ⟨EOS⟩, ⟨BOI⟩, and ⟨EOI⟩). Finally, the ini-
tial input for the first layer is as follows:
S
0
= {E
w
(⟨BOS⟩)⌢Q
ex
⌢E
w
(⟨EOS⟩)
⌢E
w
(⟨BOI⟩)⌢V ⌢ E
w
(⟨EOI⟩)}
(4)
where “⌢” denotes a concatenation operation and E
w
indicates the embedding layer for question tokens.
The transformed first tokens (i.e., at the position of
⟨BOS⟩) obtained from each module are fed into a con-
troller network MLP
ctrl
to predict the weights for the
module selection. The controller network is a multi-
layer perceptron (MLP). The weights of modules at
the l-th layer are
{w
l
1
,··· ,w
l
M
} = softmax({MLP
ctrl
(S
l
1
[0]),··· ,
MLP
ctrl
(S
l
M
[0])})
(5)
where S
l
m
[0] denotes the first token in the output of the
m-th module.
3.2 Losses for Module Selectivity
We introduce two losses, i.e., a sparsity loss and a
diversity loss to improve the module selectivity.
According to conventional approaches, the loss
for the VQA task L
T
uses the cross-entropy loss as
classification with predetermined answer candidates.
The first token in the output of the last layer S
L
[0] is
fed into the head network MLP
head
for classification,
and class probabilities of the answers p
a
are identified
via the softmax function:
p
a
= softmax(MLP
head
(S
L
[0])). (6)
Then, we adopt a sparsity loss so that each layer has a
high module selectivity:
L
S
=
1
B
B
∑
b=1
L
∑
l=1
M
∑
m=1
w
l
m
(b)
1/2
− L (7)
where B is batch size. For each layer, since the
weights are non-negative and add up to 1, the sum
Self-Modularized Transformer: Learn to Modularize Networks for Systematic Generalization
601

There
is
another
cube
that is the
same
size as the
brown
cube
;
what
is its
color
?
expl
ccomp
det attr
nsubj
relcl
det
amod
attr
prep
det
amod
pobj
punct
attr
ROOT
poss
nsubj
punct
Dependency head
Dependency tag
Layer L
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
…
…
Layer 2
0 0 1 1 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0
Layer 1
1 1 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Attention mask
Figure 2: An example of the approach to dependency parsing. Dependency tag embeddings are added to word embeddings,
and dependency heads transform into attention masks to present a single phrase sequentially for each layer.
of that weights in powers less than one is limited to 1
(i.e., sparse) or more.
In addition, a diversity loss is added so that all the
modules can be selected uniformly (≈ L/M) through-
out the dataset:
L
D
=
1
B
M
∑
m=1
B
∑
b=1
L
∑
l=1
w
l
m
(b)
−
L
M
(8)
Then, the final loss function is
L
T
+ γL
S
+ εL
D
(9)
where γ and ε are coefficients for adjusting the spar-
sity and diversity.
4 EXPERIMENTS
4.1 Preprocess and Parameters
We use Faster R-CNN with ResNet-101 backbone
pretrained by the bottom-up attention method (Ander-
son et al., 2018) to extract object features from the
input images, and we set a fixed number of objects
(O = 36). The byte-level Byte-Pair-Encoding and
Transformer block (1032 hidden units and 12 atten-
tion heads) as RoBERTa (Liu et al., 2019) are applied
to our model. We use spaCy
1
to extract the dependen-
cies from the input question. Moreover, the number of
layers is set to 22, the maximum number of phrases in
the question sentence obtained by dependency pars-
ing. We set γ and ε of loss adjustments to 5e
−4
and
5e
−5
, respectively, and train the model using Adam
optimizer with the maximum learning rate of 8e
−5
by
4,000 steps warm-up and linear decay. The training
is executed for 40 epochs using 16 A100 GPUs with
1
https://spacy.io/
a batch size of 512 in total. Since the loss decreases
rapidly, the gradients from the controller MLP
ctrl
to
the first tokens are not allowed to back-propagate.
4.2 Datasets
CLEVR is a dataset of VQA tasks that consists of im-
ages depicting simple 3D objects with a finite number
of attributes and questions of combinations of funda-
mental sub-tasks, and is used to focus on the evalu-
ation of reasoning and systematic generalization. It
contains three splits of data, i.e, a training set of 70k
images and 700k questions, a validation set of 15k im-
ages and 150k questions, and a test set of 15k images
and 15k questions.
CLOSURE is a complementary dataset to CLEVR
that consists of images in the CLEVR validation set
and questions of novel combinations of the same fun-
damental sub-tasks as CLEVR. It provides questions
of a validation set, a test set, and a small training set
for few-shot learning. Validation and test sets consist
of seven cases of questions depending on the combi-
nation of phrases, and each case of questions contains
36k questions. By training on CLEVR and evaluat-
ing on CLOSURE, it is possible to evaluate the ability
of systematic generalization on novel combinations of
known sub-tasks.
4.3 Results
Table 1 shows the evaluation results on the CLEVR
validation set and the CLOSURE test set for the
models trained on the CLEVR training set. Our
SMT achieved new state-of-the-art accuracy on CLO-
SURE compared to the models without GT programs
cited in the first-row group. Moreover, our perfor-
mance on CLOSURE cannot be achieved by simply
inputting tokens of questions and images into 22-layer
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
602
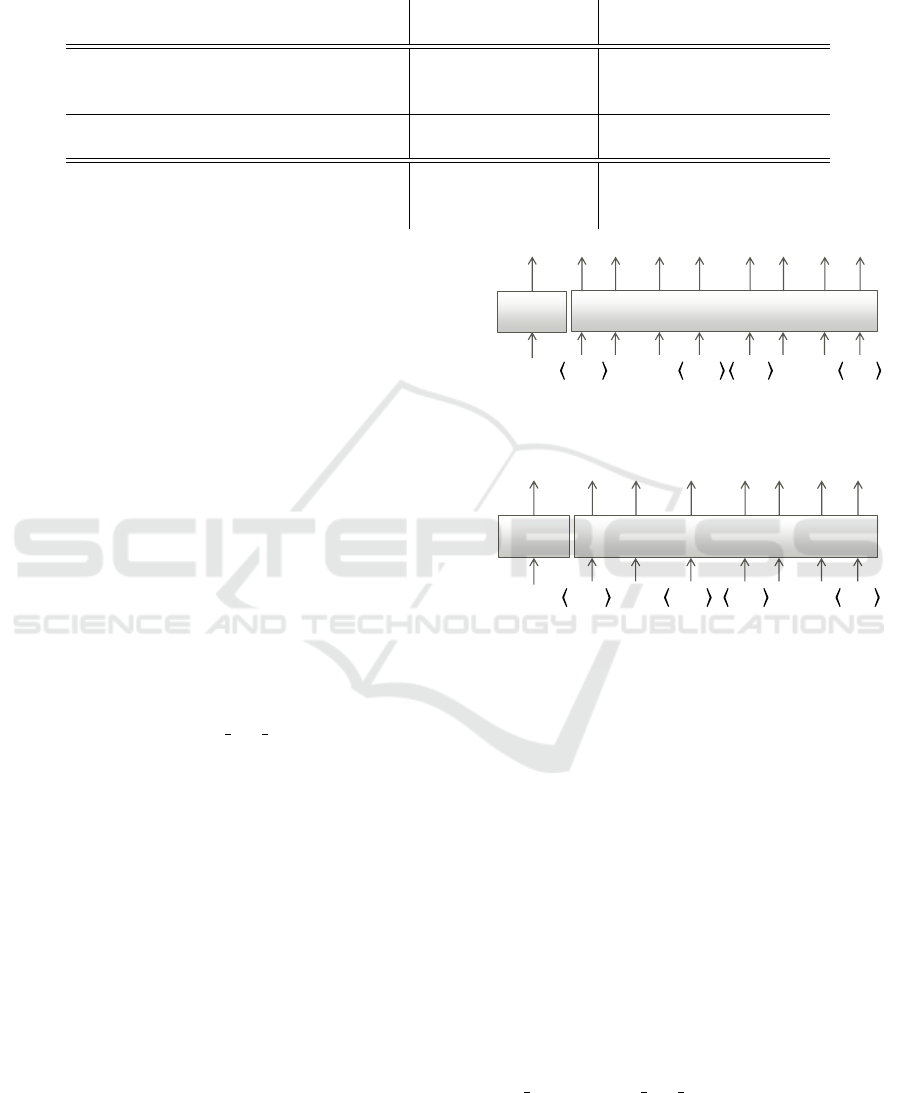
Table 1: Performance on the systematic generalization of novel linguistic combinations. For the proposed model, the mean ±
standard deviation over five runs is reported. The result of MDETR from (Yamada et al., 2022) and the others from (Akula
et al., 2021) is cited.
†
Variance is reported.
Model
use GT programs
CLEVR val CLOSURE
training evaluation
MAC (Hudson and Manning, 2018) 99.1 71.6
ViLBERT (Lu et al., 2019) 95.3 51.2
MDETR (Kamath et al., 2021) 99.7 53.3
RoBERTa, 22-layer 98.5 ± 0.03 65.7 ± 2.1
SMT(Ours) 98.3 ± 0.05 77.0 ± 2.2
NS-VQA (Yi et al., 2018) ✓ 99.2 76.4
PG-Vector-NMN (Bahdanau et al., 2020) ✓ 98.8 71.0
NMN w/ CoSAtt (Akula et al., 2021) ✓ 98.9 ± 0.1
†
88.0 ± 0.2
†
RoBERTa, as shown in the second-row group. On
the other hand, in comparison to the models using
the program generator cited in the third-row group,
the proposed model is largely inferior to NMN w/
CoSAtt but is comparable and superior to NS-VQA
and PG-Vector-NMN. Therefore our model shows a
promising performance for systematic generalization
on novel linguistic compositions without any program
annotations.
4.4 Ablation Studies
Table 2 shows the effect of approaches applied to
SMT. If the information of dependency parsing is
not used (the second-row), the performance of CLO-
SURE is significantly decreased. This result shows
that the decomposition of phrases based on depen-
dency parsing instead of GT programs greatly con-
tributes to systematic generalization for novel combi-
nations of linguistic constructs. Alternatively, SMT
causes degradation in “and
mat spa”, a major issue
to address. In the case our sparsity loss and diver-
sity loss are not set (the third row), the performance
on CLOSURE is slightly decreased; therefore, we be-
lieve that improving the module selectivity with our
proposed losses contributes to the systematic general-
ization performance.
4.5 Preliminary Experiments
We first investigated whether the proposed approach
can obtain a systematic generalization using GT pro-
grams. To this end, we evaluate the performance on
CLOSURE with the following two models. Figure
3 illustrates the two models that use GT programs.
In Fig. 3 (a), we input the embedding of the func-
tion name in the GT programs (e.g., FIND, FILTER,
or COUNT) to the controller MLP
ctrl
instead of the first
token in each module’s output. This setting gives the
oracle for the selection of modules. In Fig. 3 (b), in
Transformer 1
MLP
ctrl
w
1
*
Object features
Question
embeddings
Transformer 1
MLP
ctrl
w
1
*
Object features
Argument
embedding
...
...
Function
embedding
Function
embedding
(a)
Transformer 1
MLP
ctrl
w
1
*
Object features
Question
embeddings
Transformer 1
MLP
ctrl
w
1
*
Object features
Argument
embedding
...
...
Function
embedding
Function
embedding
(b)
Figure 3: Illustration of models using the GT programs for
preliminary experiments. (a) Instead of ⟨BOS⟩ tokens, an
embedding of the GT function is input to MLP
ctrl
; (b) fur-
thermore, instead of question tokens, an embedding of the
GT argument is input to each module.
addition to the previous setting the modules take the
embedding of the argument name in the GT programs
(e.g., “red”, “left”, or “sphere”) as linguistic input in-
stead of the question. This setting gives the oracle for
linguistic compositions of the question as well. The
number of layers is set to 26 (i.e., the maximum pro-
gram length), and the functions and the arguments fill
with a ⟨PAD⟩ token (i.e., padded to align the size of
the input tokens).
The results in Table 3 show that the performance
on CLOSURE improves enough, except for the cases
of “or mat” and “or mat spa”, by using both func-
tions and arguments (i.e., with GT programs) for se-
lecting modules with the functions and for restricting
the tokens of linguistic input with the arguments.
Self-Modularized Transformer: Learn to Modularize Networks for Systematic Generalization
603

Table 2: Ablation studies for SMT. The mean ± standard deviation over five runs is reported.
Model
CLEVR CLOSURE
val and mat or mat or mat compare compare
spa spa mat mat spa
SMT 98.3 ± 0.05 66.1 ± 16.1 77.4 ± 3.4 46.5 ± 1.8 93.3 ± 2.3 94.6 ± 1.4
w/o parsing 98.5 ± 0.04 91.6 ± 3.6 26.0 ± 5.6 36.4 ± 5.9 81.3 ± 6.2 77.8 ± 4.0
w/o S&D loss 98.3 ± 0.01 60.9 ± 9.2 77.3 ± 3.9 48.4 ± 4.8 89.9 ± 1.6 92.0 ± 2.1
Model
CLOSURE
embed embed overall
spa mat mat spa
SMT 96.1 ± 0.8 64.8 ± 2.0 77.0 ± 2.2
w/o parsing 98.5 ± 0.2 62.7 ± 0.7 67.8 ± 2.6
w/o S&D loss 96.1 ± 0.7 62.6 ± 0.8 75.3 ± 1.8
Table 3: Preliminary experiments leading to our proposed model.
Model
and mat or mat or mat compare compare embed embed
spa spa mat mat spa spa mat mat spa
SMT, 26-layer
86.0 25.6 30.1 83.3 79.5 98.3 62.1
w/o parsing
w/ GT func. 90.3 41.3 44.0 80.7 76.5 98.6 63.7
w/ GT prog. 97.4 59.0 44.7 93.8 95.9 99.1 89.3
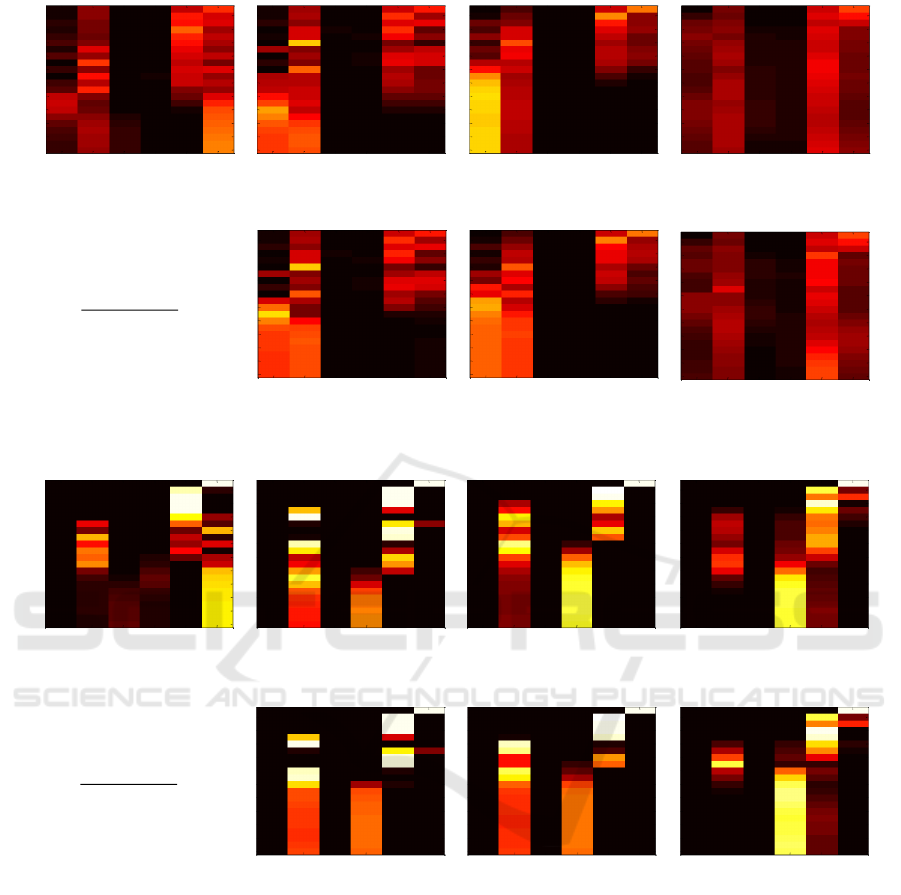
4.6 Visualization of Module Selectivity
For each question case on the CLOSURE test set, we
visualize the weight maps of modules’ selection in
SMT with different loss adjustments for sparsity and
diversity (i.e., γ and ε) in Fig. 4. First, the weights
of modules’ selection show different maps according
to the cases of question in CLOSURE, and the selec-
tivity of modules becomes higher as increasing loss
adjustments for sparsity and diversity. We show the
original setting in Fig. 4 (a) and a higher selectivity
setting in Fig 4 (b). With the high module selectiv-
ity, the accuracy of CLOSURE appears to be slightly
reduced. It is hypothesized that their learning capac-
ity will be constrained if the arrangement of modules
is strictly controlled before they understand how to
complete the task to a certain extent through trial and
error.
5 CONCLUSION
We proposed Self-Modularized Transformer (SMT)
that learns to decompose questions into sub-tasks and
compose modules without those annotations. SMT
outperforms a previous state-of-the-art NMN with-
out the human-annotated programs on the CLOSURE
dataset that provide novel combinations of the sub-
tasks. Our analysis reveals that restricting input to-
kens to be a part of the question sentence is the
key to learning the sub-tasks effectively. This ap-
proach helps to achieve systemic generalization even
for datasets not provided with human-designed anno-
tations, to which NMNs cannot apply.
With the proposed SMT, the standard deviation of
CLOSURE accuracy is large (“and mat spa”, in par-
ticular); therefore, we intend to improve the control
approach for module selection (MLP
ctrl
) in our future
work. In addition, since dependency parsing does not
significantly contribute to the performance improve-
ment on “and
mat spa” and “embed mat spa”, it is
necessary to analyze key factors to learning those sub-
tasks individually.
REFERENCES
Akula, A., Jampani, V., Changpinyo, S., and Zhu, S.-C.
(2021). Robust visual reasoning via language guided
neural module networks. In NeurIPS, pages 11041–
11053.
Anderson, P., He, X., Buehler, C., Teney, D., Johnson, M.,
Gould, S., and Zhang, L. (2018). Bottom-up and top-
down attention for image captioning and visual ques-
tion answering. In CVPR, pages 6077–6086.
Andreas, J., Rohrbach, M., Darrell, T., and Klein, D.
(2016a). Learning to compose neural networks for
question answering. In NAACL, pages 1545–1554.
Andreas, J., Rohrbach, M., Darrell, T., and Klein, D.
(2016b). Neural module networks. In CVPR, pages
39–48.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
604
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
and_mat_spa (61.2)
compare_mat_spa (93.8) embed_mat_spa (67.0) or_mat_spa (47.4)
compare_mat (93.0) embed_spa_mat (96.6) or_mat (79.7)
overall (77.0)
(a) γ = 5e
−4
, ε = 5e
−5
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
Module no.
Layer no.
1 2 3 4 5 6
2
4
6
8
10
12
14
16
18
20
22
and_mat_spa (79.1)
compare_mat_spa (79.6) embed_mat_spa (62.7) or_mat_spa (51.9)
compare_mat (78.7) embed_spa_mat (97.0) or_mat (77.3)
overall (75.2)
(b) γ = 2e
−3
, ε = 1e
−3
Figure 4: Visualization of the mean weight maps of modules’ selection for each question case on CLOSURE test set. Numbers
in brackets indicate accuracy in each question case on CLOSURE.
Antol, S., Agrawal, A., Lu, J., Mitchell, M., Batra, D.,
Lawrence Zitnick, C., and Parikh, D. (2015). VQA:
Visual Question Answering. In ICCV, pages 2425–
2433.
Bahdanau, D., de Vries, H., O’Donnell, T. J., Murty, S.,
Beaudoin, P., Bengio, Y., and Courville, A. C. (2020).
CLOSURE: assessing systematic generalization of
CLEVR models. arXiv preprint, arXiv:1912.05783.
Bahdanau, D., Murty, S., Noukhovitch, M., Nguyen, T. H.,
de Vries, H., and Courville, A. (2019). Systematic
generalization: What is required and can it be learned?
In ICLR.
Bergen, L., O’Donnell, T. J., and Bahdanau, D. (2021).
Systematic generalization with edge transformers. In
NeurIPS, pages 1390–1402.
Chen, W., Gan, Z., Li, L., Cheng, Y., Wang, W., and Liu,
J. (2021). Meta module network for compositional
visual reasoning. In WACV, pages 655–664.
D’Amario, V., Sasaki, T., and Boix, X. (2021). How mod-
ular should neural module networks be for systematic
generalization? In NeurIPS, pages 23374–23385.
Goyal, Y., Khot, T., Summers-Stay, D., Batra, D., and
Parikh, D. (2017). Making the V in VQA matter:
Elevating the role of image understanding in Visual
Self-Modularized Transformer: Learn to Modularize Networks for Systematic Generalization
605

Question Answering. In CVPR, pages 6904–6913.
Hu, R., Andreas, J., Darrell, T., and Saenko, K. (2018). Ex-
plainable neural computation via stack neural module
networks. In ECCV, pages 53–69.
Hudson, D. A. and Manning, C. D. (2018). Compositional
attention networks for machine reasoning. In ICLR.
Hudson, D. A. and Manning, C. D. (2019). GQA: A new
dataset for real-world visual reasoning and compo-
sitional question answering. In CVPR, pages 6693–
6702.
Johnson, J., Hariharan, B., van der Maaten, L., Fei-Fei,
L., Lawrence Zitnick, C., and Girshick, R. (2017a).
CLEVR: A diagnostic dataset for compositional lan-
guage and elementary visual reasoning. In CVPR,
pages 2901–2910.
Johnson, J., Hariharan, B., van der Maaten, L., Hoffman, J.,
Fei-Fei, L., Zitnick, C. L., and Girshick, R. (2017b).
Inferring and executing programs for visual reasoning.
In ICCV.
Kamath, A., Singh, M., LeCun, Y., Synnaeve, G., Misra, I.,
and Carion, N. (2021). MDETR-modulated detection
for end-to-end multi-modal understanding. In ICCV,
pages 1780–1790.
Krishna, R., Zhu, Y., Groth, O., Johnson, J., Hata,
K., Kravitz, J., Chen, S., Kalantidis, Y., Li, L.-
J., Shamma, D. A., et al. (2017). Visual genome:
Connecting language and vision using crowdsourced
dense image annotations. Int. Journal of Computer
Vision, 123(1):32–73.
Lake, B. and Baroni, M. (2018). Generalization with-
out systematicity: On the compositional skills of
sequence-to-sequence recurrent networks. In ICML,
pages 2873–2882.
Li, L. H., Yatskar, M., Yin, D., Hsieh, C.-J., and Chang, K.-
W. (2020). What does BERT with vision look at? In
ACL, pages 5265–5275.
Liu, Y., Ott, M., Goyal, N., Du, J., Joshi, M., Chen,
D., Levy, O., Lewis, M., Zettlemoyer, L., and
Stoyanov, V. (2019). RoBERTa: A robustly opti-
mized BERT pretraining approach. arXiv preprint
arXiv:1907.11692.
Lu, J., Batra, D., Parikh, D., and Lee, S. (2019). ViL-
BERT: Pretraining task-agnostic visiolinguistic repre-
sentations for vision-and-language tasks. In NeurIPS,
pages 13–23.
Ruis, L., Andreas, J., Baroni, M., Bouchacourt, D., and
Lake, B. M. (2020). A benchmark for systematic gen-
eralization in grounded language understanding. In
NeurIPS, pages 19861–19872.
Sharma, P., Ding, N., Goodman, S., and Soricut, R. (2018).
Conceptual captions: A cleaned, hypernymed, image
alt-text dataset for automatic image captioning. In
ACL, volume 1, pages 2556–2565.
Shi, J., Zhang, H., and Li, J. (2019). Explainable and ex-
plicit visual reasoning over scene graphs. In CVPR,
pages 8376–8384.
Tan, H. and Bansal, M. (2019). LXMERT: Learning cross-
modality encoder representations from transformers.
In EMNLP and Proc. of the Conference on Empirical
Methods in Natural Language Processing and ICNLP,
pages 5100–5111.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. In NeurIPS, pages
5998–6008.
Yamada, M., D’Amario, V., Takemoto, K., Boix, X., and
Sasaki, T. (2022). Transformer module networks for
systematic generalization in visual question answer-
ing. arXiv preprint arXiv:2201.11316.
Yi, K., Wu, J., Gan, C., Torralba, A., Kohli, P., and Tenen-
baum, J. (2018). Neural-symbolic VQA: Disentan-
gling reasoning from vision and language understand-
ing. In NeurIPS, pages 1039–1050.
Yu, L., Poirson, P., Yang, S., Berg, A. C., and Berg, T. L.
(2016). Modeling context in referring expressions. In
ECCV, pages 69–85.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
606
