
Football360: Introducing a New Dataset for Camera Calibration in
Sports Domain
Igor J
´
ano
ˇ
s
a
and Vanda Bene
ˇ
sov
´
a
b
Faculty of Informatics and Information Technologies, Slovak Technical University in Bratislava, Slovakia
Keywords:
Dataset, Radial Distortion, Camera Calibration, Sports, Football, Evaluation.
Abstract:
In many computer vision domains, the input images must conform with the pinhole camera model, where
straight lines in the real world are projected as straight lines in the image. Many existing camera calibra-
tion or distortion compensation methods have been developed using either ImageNet or other generic com-
puter vision datasets, but they are difficult to compare and evaluate when applied to a specific sports domain.
We present a new dataset, explicitly designed for the task of radial distortion correction, consisting of high-
resolution panoramas of football arenas. From these panoramas, we produce a large number of cropped
images distorted using known radial distortion parameters. We also present extensible open-source software
to reproducibly export sets of training images conforming to the chosen radial distortion model. We evaluate
a chosen radial distortion correction method on the proposed dataset. All data and software can be found at
https://vgg.fiit.stuba.sk/football360.
1 INTRODUCTION
The sports domain has seen a boom in the use of com-
puter vision systems and tools. Many are used at the
amateur and top level for player tracking, collection
of statistical data, or as referee assistance. For precise
operation, they rely on some kind of camera calibra-
tion process that deals with radial distortion, which is
present in images captured by cameras with sophisti-
cated lens systems.
In the past, camera calibration was performed in
laboratory conditions using special calibration pat-
terns. In recent years, many methods based on deep
learning have appeared that are capable of estimat-
ing the radial distortion parameters from just a single
frame. However, these methods were often trained
on data originating from large popular datasets such
as ImageNet (Russakovsky et al., 2015), or SUN360
(Xiao et al., 2012), which are either not related to
sports or contain very few sports images. Strong vis-
ible lines are a typical feature of man-made objects.
In some methods, (Rong et al., 2017) only specific
subsets of data containing such strong lines were se-
lected for training. Many kinds of sports are played on
fields and courts marked with very distinctive lines.
However, these lines might not always be visible. Es-
pecially in football, the game is usually broadcasted
a
https://orcid.org/0000-0003-4783-6756
b
https://orcid.org/0000-0001-6929-9694
from a great distance, and only a small fraction of the
playfield is visible at any given time. Bad weather or
football pitch condition can make the job of detect-
ing the field lines even more challenging (Figure 1).
The scarcity of strong lines in sports images makes
it difficult to evaluate and compare the effectivness of
general distortion correction methods when applied in
sports.
In this paper, we propose a new dataset of foot-
ball panorama images, a set of convenient exports of
images with known radial distortion parameters, and
an evaluation of a baseline radial distortion correction
method on the proposed dataset. We also propose a
set of tools that make it possible to apply the same
export- and evaluation- process on any other collec-
tion of panorama images, with the hope of aiding the
development of new and better radial distortion cor-
rection methods in the future.
The main contributions of this paper are:
• Collection of 268 high Resolution Panoramas -
captured from numerous positions all-around sev-
eral football arenas, capturing diverse lighting and
weather conditions (Section 3.1).
• Convenient Exports - offering training and valida-
tion data for convenient evaluation of radial dis-
tortion compensation methods (Section 3.3).
• Baseline Evaluation - of a selected method for ra-
dial distortion compensation (Section 4) on the
Jánoš, I. and Benešová, V.
Football360: Introducing a New Dataset for Camera Calibration in Sports Domain.
DOI: 10.5220/0011681200003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
301-308
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
301

Figure 1: Image with very subtle pincushion distortion. The
football field lines are very difficult to spot.
proposed dataset.
• Exporting Tool - software with source code capa-
ble of producing training and evaluation data con-
forming to selected radial distortion model (Sec-
tion 3.4).
2 RELATED WORK
2.1 Related Datasets
Currently, there are several publicly available datasets
related to the sports domain. The Sports-1M dataset
presented by Karpathy et al. (Karpathy et al., 2014)
classifies 1 million YouTube videos into 487 classes.
Datasets presented by Giancola et. al (Giancola et al.,
2018), Zanganeh et. al (Zanganeh et al., 2022), and
Jiang et. al (Jiang et al., 2020) help in significant
events detection and football analysis. In (Zanganeh
et al., 2022) 33 football videos in a total time of 2508
minutes are annotated in 10 categories. These in-
clude the presence of the goal, free kick, yellow card,
red card, and others. Kazemi et. al (Kazemi et al.,
2013) have presented a multiview annotated dataset
for player pose estimation. The Soccer Video and
Player Position Dataset presented by Pettersen et. al
(Pettersen et al., 2014) contains images stitched from
three cameras spanning the entire football field. And,
finally, the recent DeepSportradar-v1 (Van Zandycke
et al., 2022) introduces a set of tools, tasks, and data
for game analysis, court registration, and camera cal-
ibration in the basketball domain.
To the best of our knowledge, our proposed
dataset is the first public sports domain dataset ded-
icated specifically to the task of radial distortion cor-
rection.
2.2 Camera Model
We assume a perspective projection camera model
with square pixels and a principal point located at the
center of the image sensor, as described in (Klette
et al., 1998). The perspective projection projects a
3D point p
3d
= (X,Y,Z) into a 2D point on a plane
located at Z = 1 as normalized image coordinates
p = (x,y) = (X/Z,Y /Z). Scaling the normalized im-
age coordinates by the focal length f yields the result-
ing image pixel coordinates p
i
= (u, v) = ( f x, f y), rel-
ative to the image sensor center. This camera model is
referred to as a pinhole model. An important property
of the pinhole model is that it projects straight lines in
the real world into straight lines in observed images.
2.3 Radial Distortion Models
The distortion model is a mathematical relationship
that allows conversion between the observed distorted
image coordinates x = (x
i
,y
i
) and the ideal pinhole
coordinates p = (x
p
,y
p
). The polynomial model (Du-
ane, 1971) says that coordinates in the observed im-
ages are displaced away from or toward the image
center by an amount proportional to their radial dis-
tance. There is
x = (1 +k
1
∥
p
∥
2
+ k
2
∥
p
∥
4
+ k
3
∥
p
∥
6
+ ···)p (1)
where k
1
,k
2
,k
3
,...are called the radial distortion pa-
rameters (or coefficients).
The division model introduced by Fitzgibbon
(Fitzgibbon, 2001) is written as
p =
1
(1 + λ
1
∥
x
∥
2
+ λ
2
∥
x
∥
4
+ λ
3
∥
x
∥
6
+ ···)
x (2)
where λ
1
,λ
2
,λ
3
,··· are coefficients of the model.
The level of precision you can achieve by using any
one of these models is determined by the number of
coefficients you wish to use. For many applications,
using just one coefficient might be enough, however,
higher-order coefficients might be necessary to model
complex distortion effects. The single-parameter di-
vision model is generally easier to work with and
also has the nice property of mapping straight lines
into circular arcs. Several methods tried to exploit
this and tried to estimate the distortion coefficient by
fitting circles into distinctive distorted lines in the
image (Bukhari and Dailey, 2013), or by detecting
distorted lines in a modified Hough space (Alem
´
an-
Flores et al., 2014). The likelihood of success of these
methods is depending on how well can they identify
the distorted lines in the image. In football, however,
these lines might be just too difficult to spot, or not
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
302
visible at all (Figure 1). That is one of the reasons for
exploring learning-based methods of distortion cor-
rection.
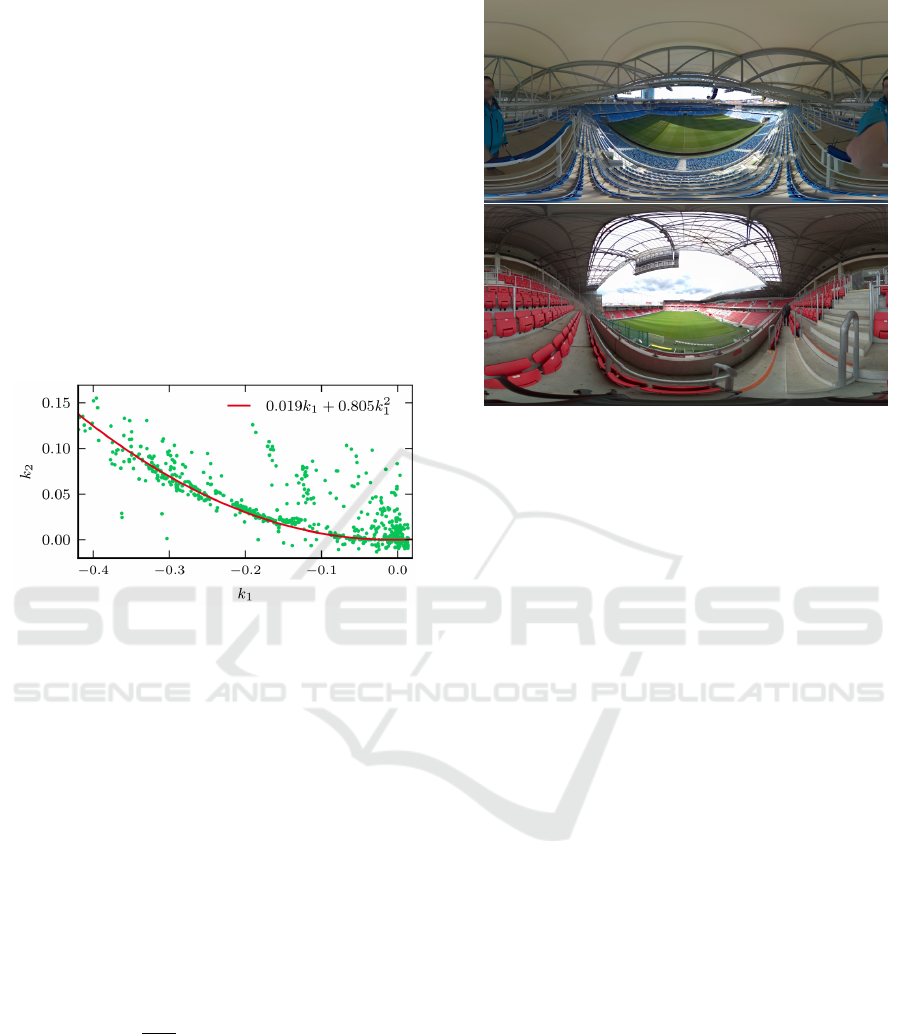
2.4 Distortion of Real Cameras
Lopez et al. (Lopez et al., 2019) have analyzed the
properties of real-world cameras. In their work they
have used Structure from Motion (SfM) with self-
calibration to estimate the distortion coefficients on
a collection of 1000 street-level images captured with
more than 300 cameras (Figure 2). By fitting a second
degree polynomial, they have obtained a model of the
observed distribution as:
k
2
= 0.019k
1
+ 0.805k
2
1
(3)
Figure 2: Distribution of the k
1
,k
2
coefficients recovered by
Lopez et al. (Lopez et al., 2019) from images captured by
more than 300 real-world cameras.
2.5 Metrics
When evaluating the accuracy of radial distortion cor-
rection, it feels natural to use L
1
, or L
2
distance be-
tween the ground truth and approximated coefficients.
However, different groups of coefficients may yield
similar levels of the distortion effect, which makes
distance metrics suboptimal for accuracy evaluations.
Also, it is not possible to compare the performance of
methods built using different distortion models. Liao
et. al (Liao et al., 2021) have proposed a new mean
distortion level deviation metric (MDLD),
MDLD =
1
W H
W
∑
i=1
H
∑
j=1
∥
b
d(i, j) − d(i, j)∥ (4)
where W and H are the width and height of the
image, and
b
d(i, j) is the distortion yielded by the ap-
proximated coefficients of the given pixel, and d(i, j)
is the ground truth distortion. This metric is indepen-
dent of the chosen radial distortion model.
Additionally, we will also be using the structural
similarity index (SSIM), and peak signal-noise ratio
Figure 3: Example panorama images.
(PSNR) metrics (Hore and Ziou, 2010) to compare the
undistorted images using ground truth and estimated
coefficients.
3 NEW DATASET
3.1 Panoramas
To capture our panoramas, we have used the commer-
cial Panono panoramic camera. The Panono camera
is equipped with 36 fixed-focus cameras with 3.26
mm focal length distributed evenly over the cam-
era’s spherical surface. When capturing a panorama,
all of the cameras capture their part of the scenery
simultaneously. The Panono company provides an
automated cloud service to stitch the 36 captured
images into a single high-resolution equirectangular
panorama (16384 × 8192 pixels).
We have obtained 268 panorama images (Figure
3) from several football arenas. In each stadium, we
captured more than 50 panorama images from multi-
ple positions on multiple levels in the arena’s tribune
including broadcast camera platforms, each image of-
fering a unique view of the playfield. The images con-
tained challenging lighting conditions, bad weather,
high contrast situations, football pitch maintenance
situations, and a regular football match with players
and referees to account for many possible situations
that may happen.
Football360: Introducing a New Dataset for Camera Calibration in Sports Domain
303

3.2 From Panoramas to Cropped
Images
From each of the panoramas, we have created a high
number of images by pointing an imaginary camera
standing in the center of the panorama in random di-
rections, and adjusting the zoom level randomly. The
resulting images would conform to the pinhole cam-
era model and would preserve straight lines from the
real world as straight lines in the image. Next, we in-
duced the radial distortion defined by randomly sam-
pled distortion parameters, that become the ground
truth labels for our final data (Figure 4). Later on a
deep neural network will try to learn to approximate
these distortion parameters.
When inducing barrel kind of distortion, the dis-
torted image might need to contain information from
outside the original undistorted image, which would
result in a typical rounded black frame (Figure 5).
Using a full panorama as a source, and integrating
the distortion computation directly within the map-
ping from panoramas to final images helps to avoid
this problem.
We have decided to use two-parameter polyno-
mial model when inducing distortion, and we have
modeled the distribution of our sampled k
1
,k
2
coeffi-
cients (Figure 6) as gaussian noise added to the man-
ifold (Equation 3) discovered by Lopez (Lopez et al.,
2019). We can divide real-world lenses into two cate-
gories - regular, and wide-angle. Regular lenses usu-
ally induce only a small amount of distortion (k
1
is
close to zero), but we can see in the Figure 2, that
even for values of k
1
close to zero, there is a signifi-
cant distribution of non-zero k
2
coefficients, and that
single-parameter distortion models, both polynomial
and division, are not sufficient enough to correct such
distortion. Wide-angle lenses (k
1
is smaller than zero)
induce much stronger distortion effect, which is dom-
inated by the k
1
coefficient.
3.3 Convenient Exports
We have split the 268 panoramas into two subsets
in 90%/10% ratio, and from these subsets we have
decided to create three sets of exported images for
training, and one set for validation. We believed it
might be useful to see what impact would the size of
the training data have on the final performance of the
distortion compensation methods, as well as on the
progress of training, and speed of convergence.
We have decided to render the images in 1920 ×
1080 pixels resolution with the 16 : 9 image aspect
ratio, which is standard for TV broadcast today. And
then resize them down to 448 × 448 pixels resolution.
Table 1: Properties of the export sets.
Set Purpose Images Size
A Training 30,000 10.5 GB
B Training 100,000 35.2 GB
C Training 300,000 105.5 GB
V Validation 10,000 3.5 GB
Table 2: Distribution of the camera parameters used to gen-
erate the synthesized data set.
Parameter Distribution Values
Pan Uniform [−40
◦
;40
◦
]
Tilt Uniform [−25
◦
;−2
◦
]
Roll Uniform [−2
◦
;2
◦
]
Field of view Uniform [10
◦
;50
◦
]
k
1
Uniform [−0.45;0.12]
noise of k
2
Normal µ = 0.0,σ = 0.02
Many publicly available pre-trained feature extractor
models operate in native 224 × 224 pixels resolution,
which can be easily achieved by using proper input
transformation during training. Having the conve-
nient exports in higher resolution also offers the pos-
sibility to experiment with custom models that might
benefit from finer image details.
Finally, we have saved the images as PNG (8-bits
per each color channel) and stored them in a single
HDF5 file, which is very convenient to work with.
The properties of the final export sets are summa-
rized in table 1.
The properties of the distributions of view pa-
rameters and induced radial distortion parameters are
summarized in table 2.
3.4 Exporting Tool
We have used the C++ programming language,
OpenGL library, and GLSL shaders to develop a com-
mand line exporting tool. The exporting tool can
be configured using JSON files to reproducibly gen-
erate export sets. The exporting process is opti-
mized to run well on modern GPUs, and is capa-
ble of producing a dataset containing 300,000 im-
ages in just a few hours. Please, refer to the GitHub
project (https://github.com/IgorJanos/stuFootball360)
for more information on how to customize the config-
uration files.
4 EVALUATION
We have decided to choose the work of Lopez et. al.
(Lopez et al., 2019) as the baseline method. Com-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
304
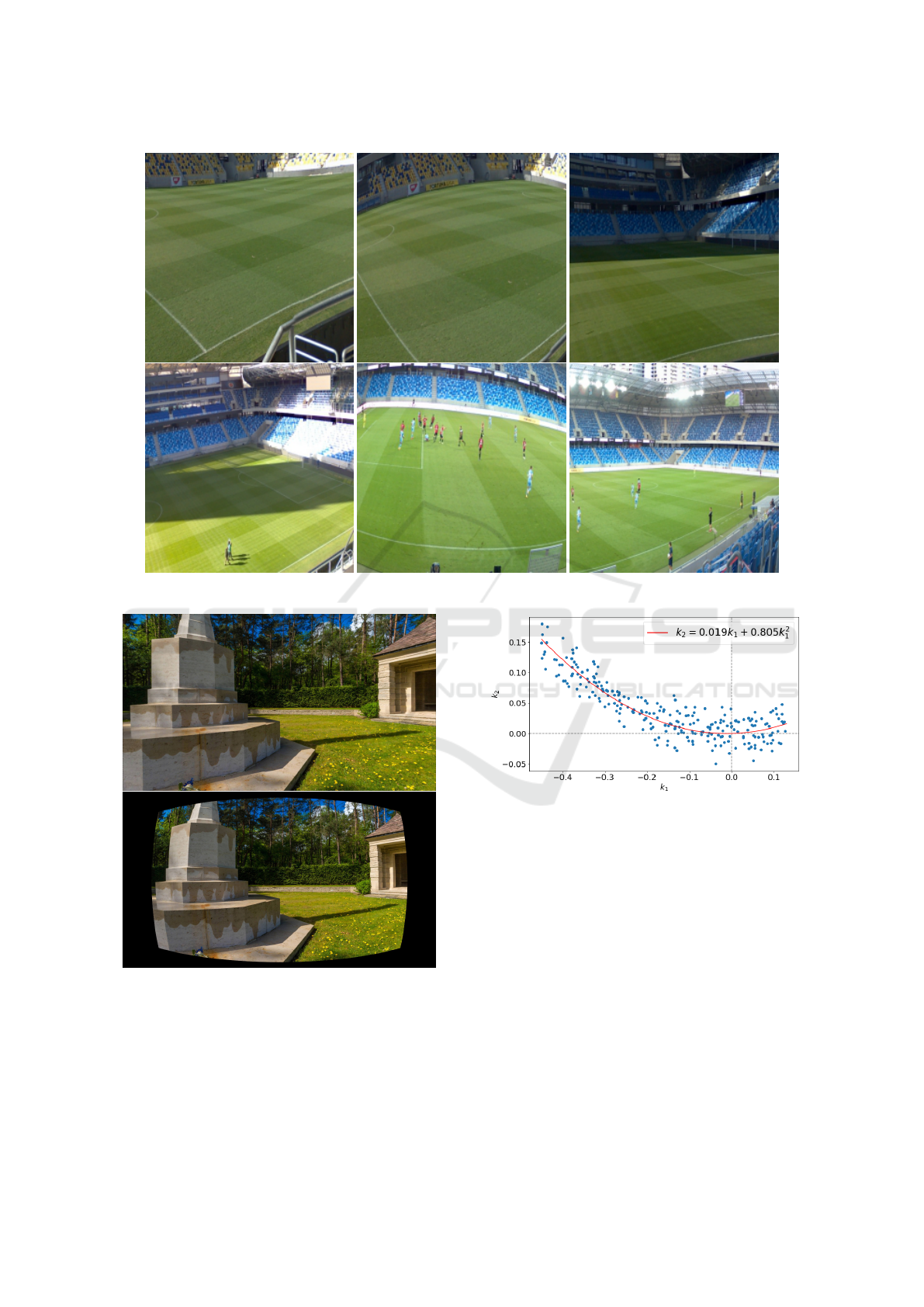
Figure 4: Example cropped and distorted images.
Figure 5: An image conforming to the pinhole camera
model (top), and a black frame around the artificially in-
duced barrel distortion (bottom).
pared to the original method, we have made only a
minor modification and removed the regressor heads
estimating pan, tilt, and field of view, which are not
relevant to our task. We have decided to use a 2-
Figure 6: Distribution of the k
1
,k
2
coefficients sampled
from the distribution summarized in table 2.
parameter polynomial model as described in section
2.3. Our neural network consists of a backbone fea-
ture extractor, and a single regressor to approximate
the k
1
coefficient. The regressor head consists of a
single hidden dense layer containing 256 units with
BatchNorm, and ReLU activation, followed by a sin-
gle output unit yielding the estimated k
1
coefficient.
From the estimated k
1
coefficient, we will compute
the value of k
2
using the equation 3.
We have selected three contemporary con-
volutional architectures - DenseNet-161 (Huang
et al., 2017), ResNet-152 (He et al., 2016), and
EfficientNet-B5 (Tan and Le, 2019) as our backbone
feature extractors, and studied their behavior during
the training on all export sets. All feature extractors
Football360: Introducing a New Dataset for Camera Calibration in Sports Domain
305
were pretrained on the ImageNet dataset.
To be able to evaluate the progress of training
on datasets of different sizes, we have decided to fix
the length of a single epoch to 1000 iterations. This
means, that the model will be trained on the same total
number of training images, looping over the smaller
datasets more often than over the larger ones. We have
set the number of epochs to 150, and batch size to 64.
This gives us 9.6 million training images for the entire
training.
We have used Adam optimizer (Kingma and Ba,
2014) with learning rate equal to 0.0001, and applied
exponential decay of 0.985 after each epoch (after
1000 iterations). We have observed no significant
difference between training with L
2
loss and Huber
loss and decided to train with L
2
loss. On a system
equipped with two RTX3090 GPUs, the training and
evaluation of a single set took about 15 hours to finish.
All nine sets were processed in about six days.
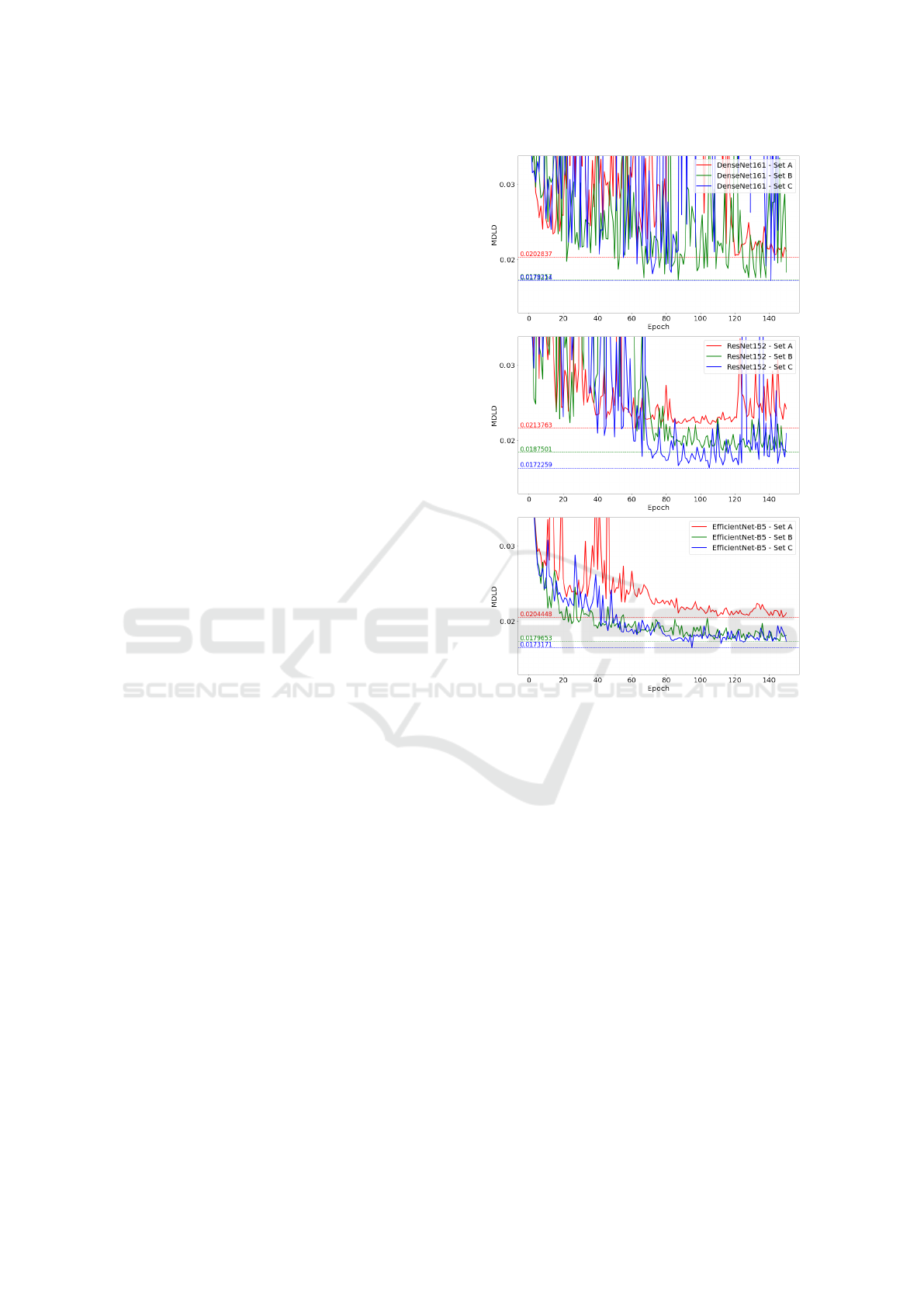
4.1 Training
During the training process, we observed that all
backbone models experienced phases of highly in-
consistent accuracy on the validation data (Figure 7).
Among the chosen backbones, the EfficientNet model
performed the most consistently, and after the ini-
tial 50 epochs, the accuracy stabilized and improved
steadily over time. One can see, that there is an ex-
pected significant accuracy gap between the small-
est set A and the larger sets B and C. The difference
between the B and C sets is rather small, especially
with the EfficientNet model. It is also interesting, that
when training on larger sets the accuracy will surpass
the best results achieved by training on set A in just
under 50 epochs on all backbone models. It is also in-
teresting, that the best accuracy was achieved some-
where around the epoch 100 on all backbone mod-
els. One can conclude, that an early stopping strategy
might have saved some computation time.
4.2 Results
We have analyzed the distribution of k
1
prediction er-
ror on all backbones (Figure 10). We have noticed,
that all backbones behaved similarly, and have felt
more confident estimating stronger distortion, where
the total distortion effect was dominated by the single
k
1
coefficient. On the intervals of k
1
corresponding to
smaller distortion, the models were less certain. We
attribute this to the presence of an additional distor-
tion effect due to the noisy k
2
coefficient, which the
model predicting only a single distortion coefficient
was less likely to grasp.
Figure 7: The progress of training on DenseNet-161 (top),
ResNet-152 (middle), and EfficientNet-B5 (bottom) back-
bones. The graph displays the value of MDLD calculated
on the validation set after each training epoch.
It is also important to note, that for images con-
taining only a very small amount of distortion an at-
tempt to correct it might even be harmful, because for
k
1
values close to 0 the variance of prediction error
seems to be the highest.
On models trained on the smallest training set A,
one can see an obvious bias problem on both extremes
of the k
1
range (Figure 9). We might conclude, that a
training set of 30,000 images might just be too small
for proper training of the baseline distortion correc-
tion method.
5 CONCLUSION
This paper introduces a new dataset to aid the devel-
opment and evaluation of methods for radial lens dis-
tortion correction. We provide a set of convenient ex-
ports for direct comparison of future methods. We
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
306
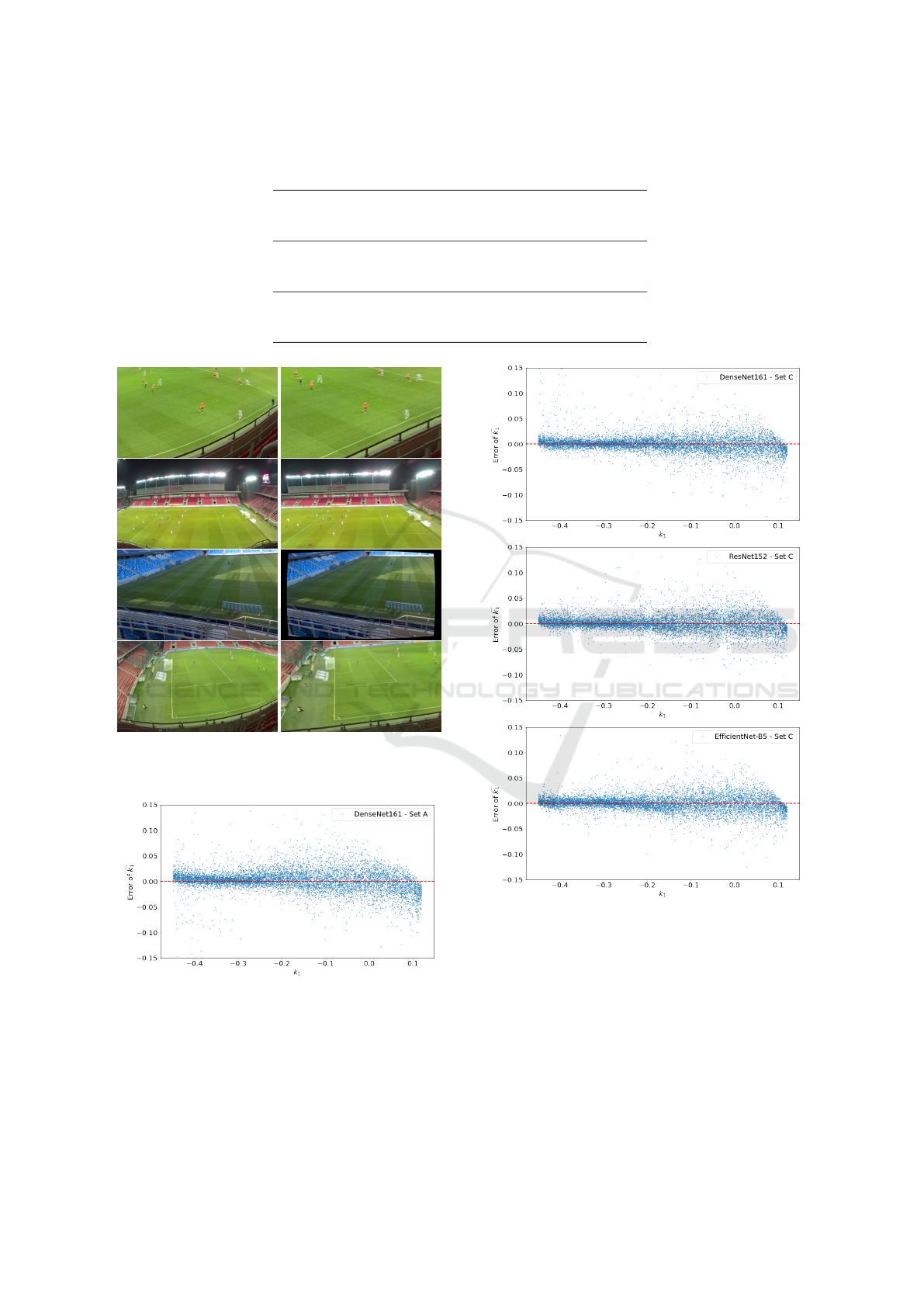
Table 3: Results of all evaluated metrics on the best-performing models.
Backbone Set SSIM ↑ PSNR ↑ MDLD ↓
DenseNet-161 A 0.829 22.323 dB 0.02028
B 0.847 22.906 dB 0.0180
C 0.850 23.085 dB 0.01782
ResNet-152 A 0.822 22.127 dB 0.02138
B 0.840 22.699 dB 0.01875
C 0.852 23.075 dB 0.01723
EfficientNet-B5 A 0.828 22.274 dB 0.02044
B 0.846 22.789 dB 0.01797
C 0.850 22.976 dB 0.01732
Figure 8: Distorted images (left column), and corrected im-
ages using the estimated distortion coefficients (right col-
umn).
Figure 9: Bias problem on the extremes of the k
1
range
when trained on the training set A.
also provide means for reproducing the dataset ex-
porting process for other domains just by changing
the source panorama images. And, we also provide
means for easy extension of the radial distortion mod-
els used.
Figure 10: The distribution of errors of the estimated
b
k
1
coefficients over the range of k
1
on DenseNet-161 (top),
ResNet-152 (middle), and EfficientNet-B5 (bottom) back-
bones.
In our experiments, we have evaluated a baseline
method with multiple contemporary feature extractor
models, and provided baseline results using metrics
that are independent of the radial distortion model
used.
Our future work will include the possible im-
provement of the baseline method in terms of speed
Football360: Introducing a New Dataset for Camera Calibration in Sports Domain
307

and accuracy. We will explore the possibility of train-
ing a model to predict the distortion coefficients inde-
pendently. We will also focus on the task of estimat-
ing the camera pose with respect to the playfield.
REFERENCES
Alem
´
an-Flores, M., Alvarez, L., Gomez, L., and Santana-
Cedr
´
es, D. (2014). Automatic lens distortion correc-
tion using one-parameter division models. Image Pro-
cessing On Line, 4:327–343.
Bukhari, F. and Dailey, M. N. (2013). Automatic radial
distortion estimation from a single image. Journal of
mathematical imaging and vision, 45(1):31–45.
Duane, C. B. (1971). Close-range camera calibration. Pho-
togramm. Eng, 37(8):855–866.
Fitzgibbon, A. W. (2001). Simultaneous linear estimation
of multiple view geometry and lens distortion. In Pro-
ceedings of the 2001 IEEE Computer Society Con-
ference on Computer Vision and Pattern Recognition.
CVPR 2001, volume 1, pages I–I. IEEE.
Giancola, S., Amine, M., Dghaily, T., and Ghanem, B.
(2018). Soccernet: A scalable dataset for action spot-
ting in soccer videos. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion workshops, pages 1711–1721.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hore, A. and Ziou, D. (2010). Image quality metrics: Psnr
vs. ssim, in ‘2010 20th international conference on
pattern recognition’. Istanbul: IEEE, pages 2366–
2369.
Huang, G., Liu, Z., Van Der Maaten, L., and Weinberger,
K. Q. (2017). Densely connected convolutional net-
works. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 4700–
4708.
Jiang, Y., Cui, K., Chen, L., Wang, C., and Xu, C. (2020).
Soccerdb: A large-scale database for comprehensive
video understanding. In Proceedings of the 3rd Inter-
national Workshop on Multimedia Content Analysis in
Sports, pages 1–8.
Karpathy, A., Toderici, G., Shetty, S., Leung, T., Suk-
thankar, R., and Fei-Fei, L. (2014). Large-scale video
classification with convolutional neural networks. In
Proceedings of the IEEE conference on Computer Vi-
sion and Pattern Recognition, pages 1725–1732.
Kazemi, V., Burenius, M., Azizpour, H., and Sullivan, J.
(2013). Multi-view body part recognition with ran-
dom forests. In 2013 24th British Machine Vision
Conference, BMVC 2013; Bristol; United Kingdom;
9 September 2013 through 13 September 2013. British
Machine Vision Association.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Klette, R., Koschan, A., and Schluns, K. (1998). Three-
dimensional data from images. Springer-Verlag Sin-
gapore Pte. Ltd., Singapore.
Liao, K., Lin, C., and Zhao, Y. (2021). A deep ordinal dis-
tortion estimation approach for distortion rectification.
IEEE Transactions on Image Processing, 30:3362–
3375.
Lopez, M., Mari, R., Gargallo, P., Kuang, Y., Gonzalez-
Jimenez, J., and Haro, G. (2019). Deep single image
camera calibration with radial distortion. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 11817–11825.
Pettersen, S. A., Johansen, D., Johansen, H., Berg-
Johansen, V., Gaddam, V. R., Mortensen, A.,
Langseth, R., Griwodz, C., Stensland, H. K., and
Halvorsen, P. (2014). Soccer video and player posi-
tion dataset. In Proceedings of the 5th ACM Multime-
dia Systems Conference, pages 18–23.
Rong, J., Huang, S., Shang, Z., and B, X. Y. (2017). Radial
lens distortion correction using convolutional neural
networks trained with synthesized images. Computer
Vision – ACCV 2016, pages 35–49.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., et al. (2015). Imagenet large scale visual
recognition challenge. International journal of com-
puter vision, 115(3):211–252.
Tan, M. and Le, Q. (2019). Efficientnet: Rethinking model
scaling for convolutional neural networks. In Interna-
tional conference on machine learning, pages 6105–
6114. PMLR.
Van Zandycke, G., Somers, V., Istasse, M., Don, C. D., and
Zambrano, D. (2022). Deepsportradar-v1: Computer
vision dataset for sports understanding with high qual-
ity annotations. In Proceedings of the 5th Interna-
tional ACM Workshop on Multimedia Content Analy-
sis in Sports, pages 1–8.
Xiao, J., Ehinger, K. A., Oliva, A., and Torralba, A. (2012).
Recognizing scene viewpoint using panoramic place
representation. Proceedings of the IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition, pages 2695–2702.
Zanganeh, A., Jampour, M., and Layeghi, K. (2022). Iaufd:
A 100k images dataset for automatic football im-
age/video analysis. IET Image Processing.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
308
