N-MuPeTS: Event Camera Dataset for Multi-Person Tracking and
Instance Segmentation
Tobias Bolten
1 a
, Christian Neumann
1 b
, Regina Pohle-Fröhlich
1
and Klaus D. Tönnies
2
1
Institute for Pattern Recognition, Hochschule Niederrhein, Krefeld, Germany
2
Department of Simulation and Graphics, University of Magdeburg, Germany
Keywords:
Dynamic Vision Sensor, Event Data, Instance Segmentation, Multi-Person Tracking, Dataset.
Abstract:
Compared to well-studied frame-based imagers, event-based cameras form a new paradigm. They are biolog-
ically inspired optical sensors and differ in operation and output. While a conventional frame is dense and
ordered, the output of an event camera is a sparse and unordered stream of output events. Therefore, to take
full advantage of these sensors new datasets are needed for research and development. Despite their ongoing
use, the selection and availability of event-based datasets is currently still limited.
To address this limitation, we present a technical recording setup as well as a software processing pipeline
for generating event-based recordings in the context of multi-person tracking. Our approach enables the auto-
matic generation of highly accurate instance labels for each individual output event using color features in the
scene. Additionally, we employed our method to release a dataset including one to four persons addressing the
common challenges arising in multi-person tracking scenarios. This dataset contains nine different scenarios,
with a total duration of over 85 minutes.
1 INTRODUCTION
Dynamic Vision Sensors (DVS) are optical sensors
designed to replicate the basic neural architecture and
operating principle of the human eye. Each pixel of
a DVS detects and reacts completely asynchronously
and independently to changes in brightness. In this
process, each pixel generates and sends an output as
soon as a brightness change above a set threshold
value is detected. Therefore, unlike classic image sen-
sors that operate with a fixed sampling rate, the output
of a DVS is a completely data-driven stream of trig-
gered output ‘events’. Each event contains informa-
tion about
(a) the (x,y) position of the triggered pixel in the sen-
sor array,
(b) a very high precision timestamp t of the time of
occurrence, and
(c) an indicator for the direction of the detected
brightness change.
The operation and output paradigm of the DVS
results in technical advantages for tracking and seg-
mentation tasks. Compared to classic systems, the
a
https://orcid.org/0000-0001-5504-8472
b
https://orcid.org/0000-0002-0871-8629
DVS event stream APS sensor
color frames
t
i
t
j
t
k
y
x
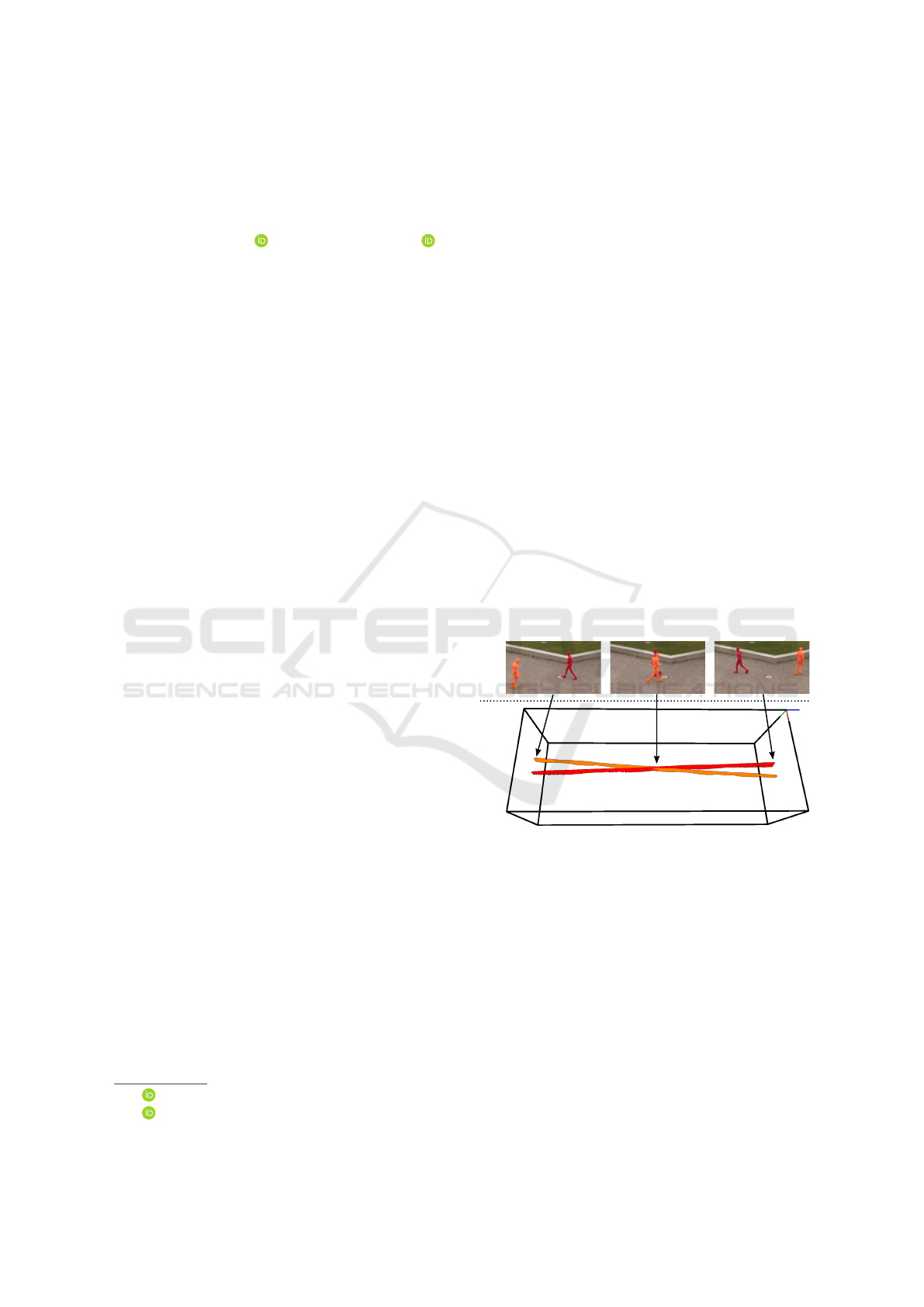
t
Figure 1: DVS event stream concept visualization. The high
time resolution supports continuous tracking approaches by
using high-quality segmentations.
DVS signal contains significantly less redundant in-
formation, as only changes are recorded. For segmen-
tation tasks it is advantageous that static components
do not need to be processed. Due to the high time
resolution of the DVS, the resulting 3D (x,y,t) space-
time event cloud provides an almost continuous sig-
nal for moving objects (see Figure 1). A high-quality
segmentation thus supports the future development of
DVS-based tracking methods. However, this requires
publicly available datasets that include these segmen-
tation annotations as well as object tracking scenarios
and challenges.
290
Bolten, T., Neumann, C., Pohle-Fröhlich, R. and Tönnies, K.
N-MuPeTS: Event Camera Dataset for Multi-Person Tracking and Instance Segmentation.
DOI: 10.5220/0011680300003417
In Proceedings of the 18th Inter national Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
290-300
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

In the context of multi-object tracking (MOT), a
dataset should include the following common chal-
lenges (Islam et al., 2015; Xu et al., 2019; Luo et al.,
2021):
1. object occlusions (through infrastructure as well
as by other persons in the scene)
2. similar appearance and body shape of recorded
persons
3. included changes in pose and movement patterns
(e.g. kneeling, standing, walking, and running)
4. interactions among multiple persons (including
abrupt changes in movement direction and speed)
5. included objects in different sizes
In addition, to take advantage of the high temporal
resolution of the sensor, this dataset must provide the
instance annotations for each event of the DVS out-
put stream. Due to the novelty of the sensor itself,
the availability of pure event-based datasets is limited
compared to the frame-based domain. To the best of
the authors’ knowledge, currently no DVS dataset ful-
fills these requirements.
In this paper, we present a technical setup for
recording and also publish a dataset which aims to
provide instance annotations on DVS data. In sum-
mary, we contribute:
• a detailed description of a hardware setup and cor-
responding software processing pipeline allowing
the acquisition of multi-person DVS recordings
with high-quality per-event instance labels
• a ready-to-use and publicly available multi-person
DVS dataset that includes the aforementioned re-
quirements within an outdoor recording setup.
Section 1.1 summarizes related work in terms of
existing datasets and event-based approaches. The re-
quirements for our recording setup are specified in
Section 2. Subsequently, the hardware setup used
is described in Section 3. The proposed software
pipeline for generating object annotations is presented
in detail in Section 4. Section 5 outlines the details
and statistics of the provided dataset.
1.1 Related Work
Early event-based tracking approaches were devel-
oped and evaluated using basic datasets containing,
for example, objects of simple geometric shape mov-
ing (c.f. the shape scenes from (Mueggler et al.,
2017b)). These types of scenes were used to detect
and track features such as corners (Mueggler et al.,
2017a; Alzugaray and Chli, 2018). In the context
of this paper, however, more complex event-based
datasets concerning person detection and tracking are
of greater interest.
In (Jiang et al., 2019) an approach for person de-
tection in the application area of traffic surveillance
was presented. For this purpose, a custom dataset was
used which only has a total length of ≈ 14 seconds. In
a very similar application context, a person detection
was also implemented in (Chen et al., 2019). This
was followed by the publication of a dataset in (Miao
et al., 2019). The detection part of this dataset con-
sists of only twelve short-length sequences. In (Ojeda
et al., 2020) and (Bisulco et al., 2020) two approaches
for filtering the event stream are presented with the
goal of implementing person detection close to hard-
ware. For this, a DVS dataset consisting of several
hundred sequences is used. Yet, this dataset is not
publicly available.
The task of multi-person tracking is directly ad-
dressed in (Pi ˛atkowska et al., 2012). Due to the lack
of available ground-truth annotations, their approach
was only tested on a very limited set of data which
were manually labeled. With the work of (Hu et al.,
2016), DVS benchmark datasets have been published.
This includes a part that explicitly relates to object
tracking. In this case, though, only the tracking of a
single object is considered. In (Camuñas-Mesa et al.,
2018) challenges arising from object occlusion are ad-
dressed for an event-based tracking. The real-world
capabilities of their approach was tested on a multi-
person tracking scenario. But the qualitative results
were only considered on the basis of a short scene.
In summary, it can be stated that there are cur-
rently only a few event-based datasets available
within the context of person detection and track-
ing. Furthermore, label annotations included in those
datasets are not sufficiently discriminative. In large-
scale object detection datasets such as the GEN1 au-
tomotive dataset (de Tournemire et al., 2020), object
labels are often specified only in the form of bound-
ing boxes. With (Alonso and Murillo, 2019; Bolten
et al., 2021), there are event-based datasets that pro-
vide annotations for semantic segmentation. Never-
theless, to fulfill the initial requirements in the context
of multi-person tracking, an instance-level annotation
is required. Currently, no suitable event datasets exist
that satisfy this.
In conventional frame-based computer vision,
datasets exist that provide annotations beyond bound-
ing boxes for tracking and segmentation (Voigtlaen-
der et al., 2019). With work like (Hu et al., 2021),
approaches do exist to convert frame-based datasets
into the event-based domain. However, this conver-
sion does not reflect the non-ideal sensor character-
istics fully. Therefore, we propose a procedure that
N-MuPeTS: Event Camera Dataset for Multi-Person Tracking and Instance Segmentation
291

allows the creation of a native DVS dataset with an
automated generation of labels requiring only mini-
mal manual work.
Like (Marcireau et al., 2018), our approach is also
based on exploiting color features within the scene.
Compared to their hardware setup, which consists of
three DVS and an optical beam splitter, our setup
is simpler and does not impose constraints on the
recorded spectrum. A detailed description of our used
setup is given in Section 3.
2 LABEL EXTRACTION
A meaningful dataset requires accurate labels. In the
case of instance labeling of event data, manual an-
notation is not efficient. We solved this problem by
introducing additional information in a way so that
the original data is not influenced. More specifically,
a DVS is usually based on CMOS technology. A
CMOS image sensor typically is most sensitive to
near-infrared light. DVS with color filter matrices ex-
ist only as prototypes and do not feature the higher
image resolution of newer DVS models (Moeys et al.,
2018; Taverni et al., 2018). Thus, for practical pur-
poses DVS are not capable of recording color infor-
mation. We are using this circumstance to encode the
information which event belongs to a given person in
the color of the clothes of the persons itself.
In order to record the color information, a sec-
ond frame-based color camera, referred to as an ac-
tive pixel sensor (APS) camera, is required. Assum-
ing proper recordings, label data with high accuracy
can be extracted from the color frames.
2.1 Color Features
The color features are generated by single-colored
full-body skin-tight garments. The following speci-
fications are important for this:
1. A single color per suit is required because person
instances will be separated by color hue.
2. The suit must cover the whole body so that color
information is available for all event data trig-
gered by a person.
3. The suit should be skin-tight so that the silhouette
of a person is not larger than normal.
The color of the suits changes the recorded inten-
sities of the DVS only slightly. Synthetic fabrics tend
to be strongly NIR-reflective. Independent of the vis-
ible color, the reflected NIR-light dominates the spec-
tral response of the garment. It is thus able to trigger
DVS events for any chosen color.
Initial experiments showed that fabrics can be dis-
tinguished by color hue even when the separation in
hue is small (see Figure 5 and the description in Sec-
tion 4.2). This enables the use of many colors and
therefore many person instances can be distinguished
simultaneously.
However, there are multiples sources of color arti-
facts that must be considered:
1. The lens introduces chromatic aberrations, i.e.
phantom colors towards the edges of the image
area, that can only be partially corrected.
2. The camera records color information through a
color filter matrix. Only three colors, red, green,
and blue, are recorded. The real source color is a
mixture of these and colors first needs to be recon-
structed during demosaicing. During this process
errors are introduced near borders because neigh-
boring color signals could be combined while the
sources were separated in reality. This also intro-
duces new colors that are not part of the real scene.
As separation of persons by color hue is the basis
of our work, erroneous color information hinders
our method.
3. A third source of errors is the on-chip binning pro-
cess of the camera sensor. The effect that binning
has on resulting colors is similar to the previous
point. By aggregating 2 × 2 pixels it is possible to
get phantom colors not included in the real scene.
Also over-exposure in each color channel must be
avoided. Single-colored suits can quickly lead to
over-exposure in a single channel. It is recommended
to deliberately under-expose the scene so that no re-
quired information is lost.
2.2 Environmental Influences
Data acquisition in an outdoor environment is natu-
rally influenced by the environment itself. One impor-
tant aspect is the lighting of the scene. Direct sunlight
is not preferred because the color of the direct sunlight
itself is different from the color of diffusely reflected
light. In consequence, the parts in direct sunlight will
need a different white balance than parts in the shad-
ows. The information about which parts are in direct
sunlight is not known precisely and thus the necessary
distinction can not be made. Overcast is preferred for
its diffuse scene lightning effect.
Another practical problem are airborne particles.
Acquisition during precipitation is not useful because
the sensitivity in detecting changes in brightness and
the temporal resolution of a DVS is high enough to
image the rain drops themselves. Wet scenes should
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
292
be avoided due to the possibility of unwanted reflec-
tions and apparent color shift of wet surfaces of some
materials. Thus, dry weather without larger airborne
particles is preferred. This includes also insects and
pollen, as these environmental influences would also
be included in the DVS signal.
3 HARDWARE SETUP
In order to enable accurate processing of event and
color information, several aspects and requirements
regarding the hardware setup need to be considered.
This includes the selection of the sensors used as well
as their mounting in a stereoscopic setup to optimize
the perspective mapping. Furthermore, the colored
garments used to incorporate the color features must
also be taken into account.
3.1 Sensors
The DVS is a CeleX-IV built by CelePixel (Guo et al.,
2017). The sensor is combined with an 8mm wide-
angle lens from Computar
1
. The DVS is connected
via USB 3 to a notebook that stores the event data
on an external solid state drive. Previous experiments
showed that event noise is strongly dependent on sen-
sor temperature (Nozaki and Delbruck, 2017; Berth-
elon et al., 2018). We applied a cooling system based
on Peltier elements in order to stabilize the operating
temperature at a low level.
Our APS camera is based on a Sony IMX477
CMOS image sensor. For the color frames, it is nec-
essary to gather the data in a lossless manner. Our
requirements are minimal frame drops, maximal reso-
lution, full color information, and maximal frames per
second (fps). State-of-the-art video compression like
H.264 allocates few bits to color information. The
resulting hue values are not usable for our purposes.
It is possible to record a raw video stream from the
IMX477 sensor. The video stream features a reso-
lution of 4056 × 3040 px with 12-bit per pixel. The
resulting data rates are a challenge for realtime appli-
cations. Multiple limitations arise here:
• The camera interface on the APS sensor board is
not capable of transmitting the full resolution in
uncompressed form at the desired rate of frames
per second. Thus, binning was activated which
in turn halves the image dimensions to 2028 ×
1520px.
1
Computar MEGAPIXEL V0814-MP, f=8mm, f/1.4-
f/16, 1 inch, C-Mount
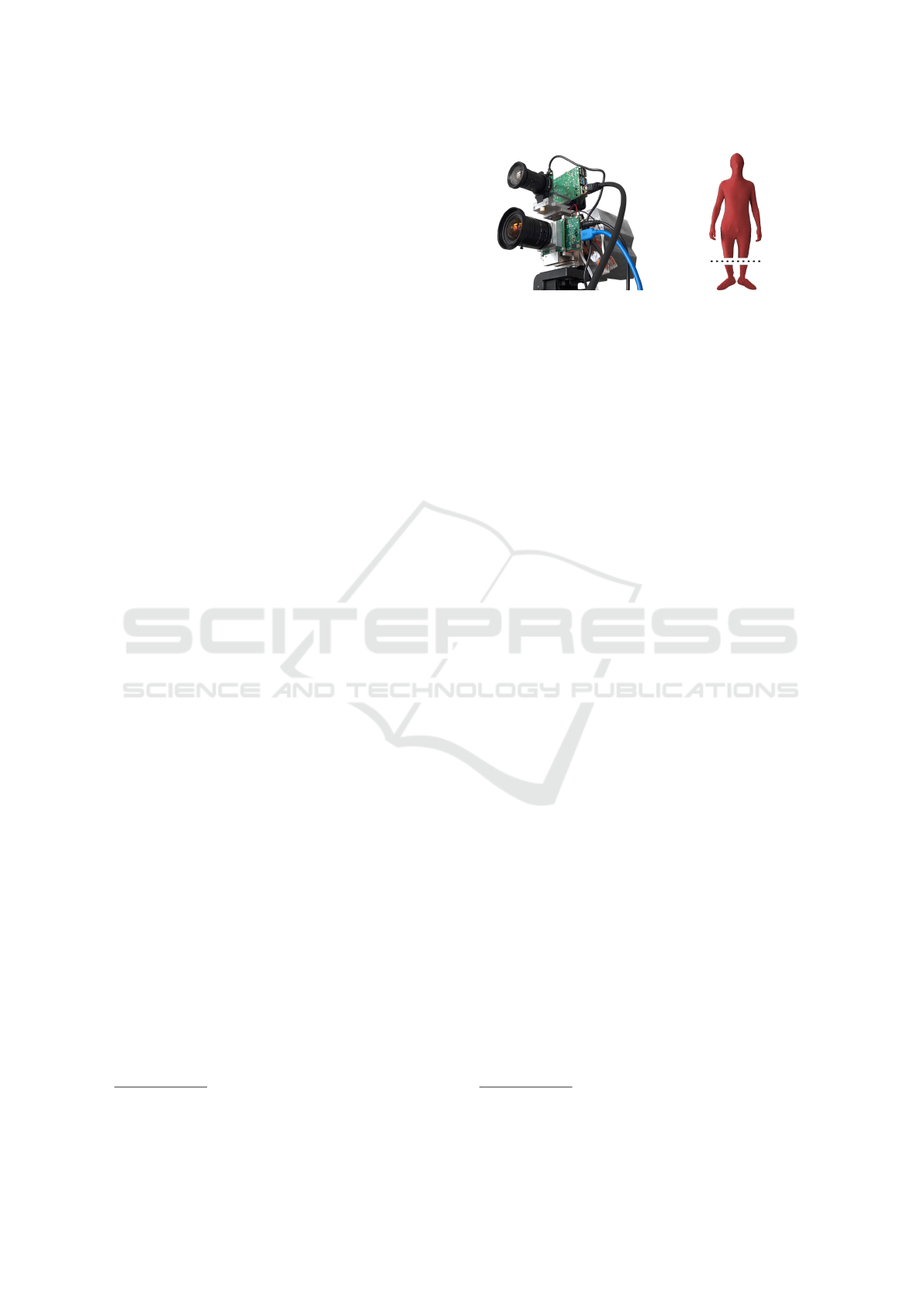
a) CeleX-IV with cooler b) Full-body garment.
(bottom) and IMX477 (top) and cotton shoe cover.
Figure 2: Sensor and color garment setup.
• The accumulated data rates of the APS and DVS
as well as the storage on an external USB media
exceed the capacity of a single computer’s USB
bus. Therefore a dedicated Raspberry Pi 4 was
used to acquire the APS frames and store them to
another external solid state drive.
The field of view was matched as close as possible by
the choice of the lens. The IMX477 was combined
with a 4mm wide-angle lens from Edmund Optics
2
Both sensors together form a stereoscopic camera.
The cameras are stacked vertically as parallax is less
apparent along the vertical axis with cameras look-
ing at the scene from an elevated position. Also, the
lenses were mounted as close to each other as possi-
ble. The physical mount was milled from aluminum
alloy and placed on a solid surface so that the like-
lihood of tripod shake triggering unwanted events is
minimized. The optical axis were adjusted towards
the same point in the center of the scene so that lat-
eral overlap of the resulting views is maximal. The
resulting hardware setup is shown in Figure 2a.
3.2 Color Garments
The full-body garment is made up of two parts. The
complete body, including head, hands, and foots, is
covered by a Morphsuit – a commercially available
Spandex-based suit. In order to guarantee a natural
walking pattern, all persons were allowed to wear ev-
eryday shoes. The shoes are covered using separate
covers sewed from colored cotton fabric. An example
of a complete garment is depicted in Figure 2b.
4 SOFTWARE PIPELINE
The software processing pipeline for generating the
label masks as well as their propagation to the DVS
2
Edmund Optics TECHSPEC® UC Series #33-300,
f=4mm, f/1.8-f/11, 1/2 inch, C-Mount.
N-MuPeTS: Event Camera Dataset for Multi-Person Tracking and Instance Segmentation
293
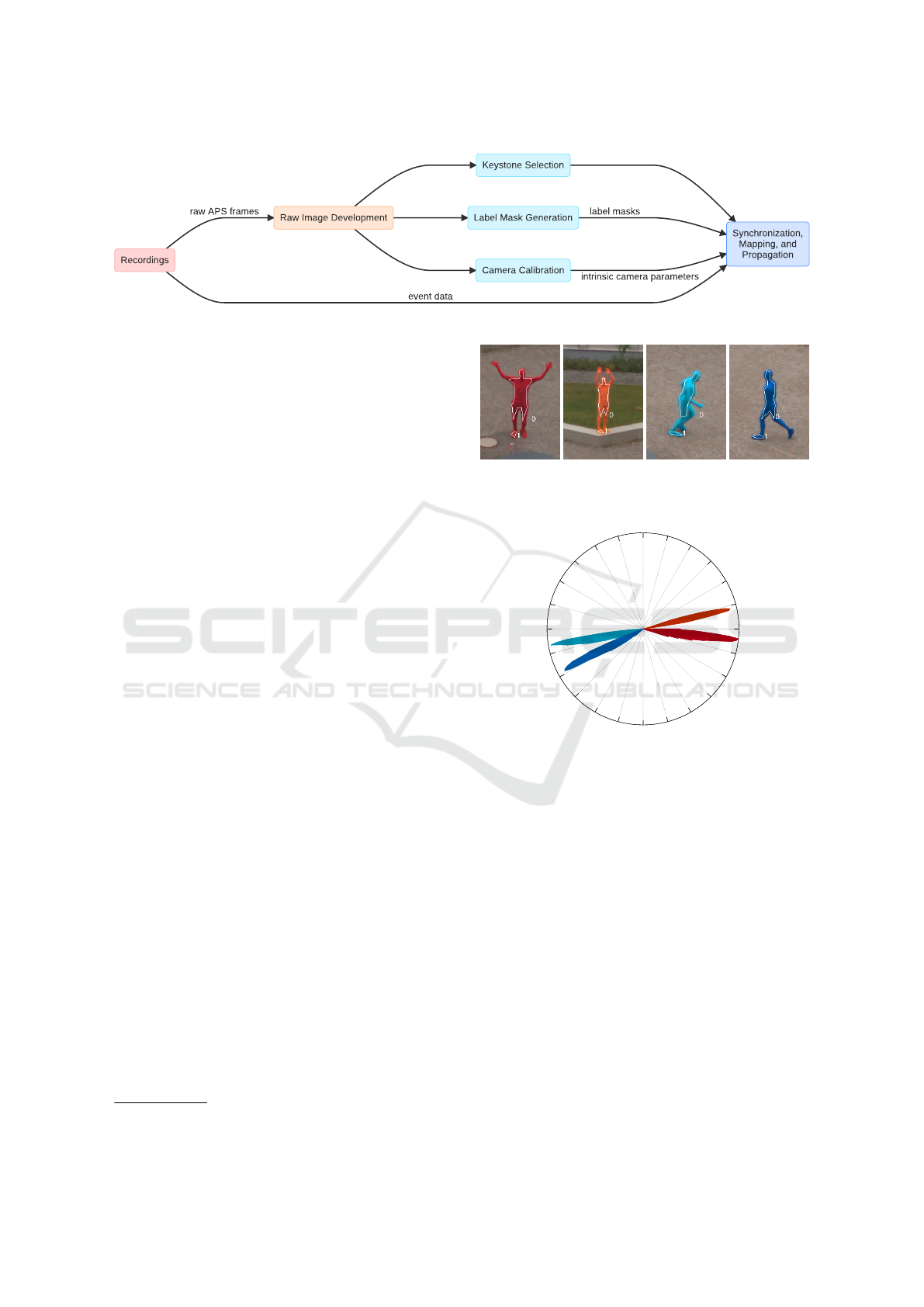
Figure 3: Overview of software pipeline used for dataset generation.
data consists of several stages which are explained in
the following. An overview of the process is given in
Figure 3.
4.1 Raw Image Development
To minimize color artifacts and inaccuracies, espe-
cially in hue, the frame-based APS recordings from
the IMX477 sensor are performed as lossless as possi-
ble. This means that a full digital photo development
must be applied to develop appropriate color images
from the raw data.
In order to minimize the required data bandwidth
of the sensor, the acquisition is performed in a packed
data format. For every two 12-bit pixels, three bytes
are combined by the sensor. After unpacking the indi-
vidual pixels from this structure, a black level correc-
tion is performed and a color image is generated by
using an edge-aware demosaicing algorithm on the
Bayer-filtered data. Following clipping and normal-
ization of the data, a color correction matrix is applied
to transfer the sensor-specific color values into a stan-
dardized, device-independent color space. Finally a
gamma correction is applied and the resulting frame
is cropped to the resolution of 2000 × 1500px to re-
move information-free stride pixels and color artifacts
at the borders from the image.
In a second step, chromatic aberrations are cor-
rected. For this, the image is further adapted with an
open-source photo editor
3
.
4.2 Label Mask Generation
Label masks are automatically generated based on the
developed APS frames by means of color hue seg-
mentation.
First, regions of interest are marked by hand (see
Figure 4). Areas of different illumination were in-
cluded. This is a countermeasure against the influ-
ences described in Section 2.2. After conversion into
HSV color space, we get multiple color clusters per
garment color. The clusters can be visualized in a
3
https://www.darktable.org/
Figure 4: Example of one-time manually annotated color
areas for the performed clustering.
0°
15°
30°
45°
60°
75°
90°
105°
120°
135°
150°
165°
180°
195°
210°
225°
240°
255°
270°
285°
300°
315°
330°
345°
Figure 5: Polar histogram of garment colors as contained in
annotations on developed APS frames used for dataset.
polar histogram with 360 bins (see Figure 5). These
clusters are further processed to give a single centroid
in hue for each garment color.
For this purpose, an agglomerative clustering is
computed on the hue values. Clusters with differ-
ences in hue below a given threshold are merged. This
threshold is increased as long as the number of result-
ing clusters is lower than the number of garment col-
ors used during recording. It is assumed that a normal
distribution is suited to model potential color varia-
tions, e.g. due to lighting. A normal distribution is fit
to each cluster. The calculated mean hue of each clus-
ter is used for the hue segmentation in the next step.
The hue range in HSV color space is circular. Care
must be taken to use circular mean for all computa-
tions involving hue.
The hue segmentation is computed by calculating
the differences to the centroids in hue of each clus-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
294

ter and then applying a threshold α. At this point,
we have selected one circular sector for each color in
HSV color space. We can further narrow the decision
regions by incorporating saturation and value. The
idea is to exclude all colors that cannot origin from
the color garment in the given setup. We remove all
pixels with a saturation ≤ σ and a value ≤ ϕ. The
thresholds must be selected so that as little as possi-
ble from the regions of interest is cut away. At last a
morphological opening closes small holes. Now we
have separate binary mask for each garment color.
Additional care was taken to prevent multiple la-
bels per pixel and removal of false positives. When
the resulting label mask is set for multiple colors at
one position only one color is kept. Centroids’ hue
values are used in ascending order to define priori-
ties. Most false positives are removed by applying
a connected component analysis and suppressing all
connected components with a size of less than τ.
4.3 Synchronization, Mapping &
Propagation
Several steps are necessary to project the obtained la-
bel masks onto the DVS event stream. A priori, in-
trinsic camera parameters must be estimated for both
sensors of the setup. The required points can be ex-
tracted using a chessboard moving slowly and apply-
ing corner detection to it.
It is important to temporally synchronize the
views so that label masks derived from the APS cam-
era correspond to the view of the DVS. The record-
ing of raw data from the APS color sensor is techni-
cally limited to 40 fps by the hardware setup used
4
.
For further processing, the continuous data stream of
the DVS is therefore also divided into sections of the
length of 25ms. The resulting APS frames and the
time windows of the DVS are then synchronized to
each other on the basis of system clock timestamps
corresponding to their acquisition time. The clocks
of the systems used are adjusted via NTP. This limits
the error over time to a small value. Additionally, an
initial synchronization at the start of every recording
is manually performed using a visual cue. This visual
cue is used to compensate most of the absolute error
between the system timestamps.
For mapping, the generated label mask is first
undistorted with the determined camera parameters of
the APS. This process step is illustrated exemplarily
in Figure 6a and 6b. Then the mask is projected onto
4
Using the 12-bit packed data format at a sampling rate
of 40 fps results in an approximate data rate of 178
MB
s
which must be continuously transferred and stored.
the DVS, changing the field of view and image resolu-
tion (see Figure 6c). For this purpose, a homography
is determined on the basis of manually selected points
on the ground plane of the scene. This is then used to
warp the mask in perspective.
The redistorted instance labels (see Figure 6d) are
finally propagated to the plain DVS event stream. All
events within a synchronized time window are as-
signed with the label that the mask has at each cor-
responding spatial position. The final result is thus a
per-event instance label annotation on the DVS output
stream (see Figure 6e).
4.4 Limitations
There is one notable limitation. The label mask gen-
eration based on the APS frames works for both, mov-
ing and standing persons. In contrast, a DVS ideally
only generates event data for regions with movement.
In consequence, noise of the DVS is labeled as be-
longing to a person when a person is not moving.
The label is wrong when looking at event data it-
self because the events were not triggered by the per-
sons themselves. But when viewed from the stand-
point of tracking algorithm the label is correct, be-
cause a person cannot disappear in a scene. There-
fore, we decided not to further post-process the label
masks to address this issue.
5 DATASET: N-MuPeTS
5
First, we give an overview of what is included in the
dataset and briefly explain every annotation used. Af-
ter that we discuss multiple statistics derived from the
dataset.
During recording in an unconstrained outside
environment, interference can not be completely
avoided. Every deviation from a perfect sequence of
actions must be edited during post-processing. We
decided to mark those sequences which are of lower
quality and split the recording at the point in time
when a change in quality occurs. This process was
done manually to ensure high accuracy. We observed
a number of issues, including both, recording artifacts
and post-processing errors. We distinguished three
classes of quality by the impact of the issues on us-
ability for tracking applications. From worst to best,
the quality classes are:
Quality 3: corresponds to these major issues:
• uninvolved persons in scene
5
Neuromorphic-Multi-Person Tracking and Segmen-
tation Dataset.
N-MuPeTS: Event Camera Dataset for Multi-Person Tracking and Instance Segmentation
295
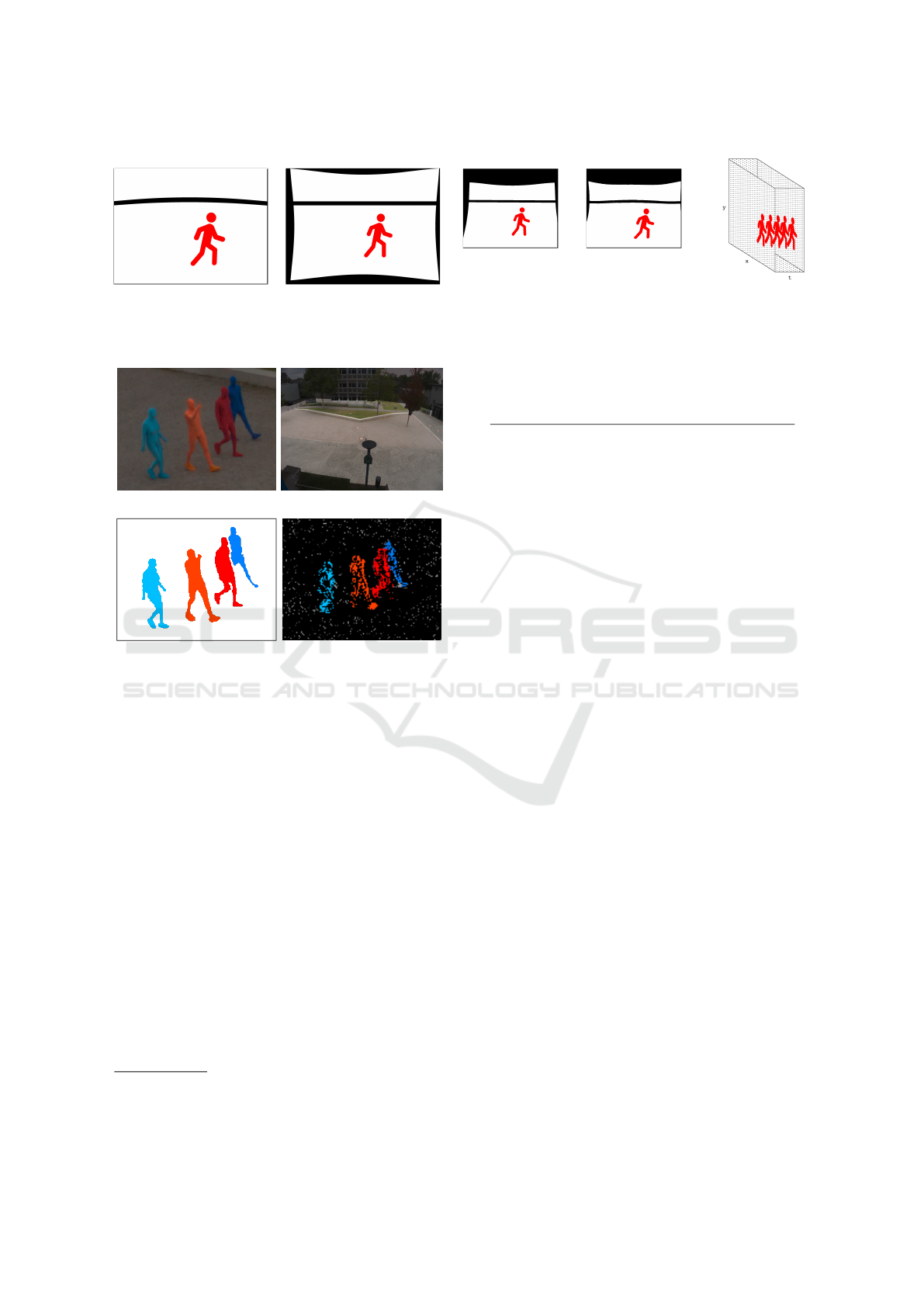
2000 × 1500 px
(a) Generated label mask
with lens distortion.
2300 × 1725 px
(b) Label mask with lens
correction applied.
883 × 736 px
(c) Undistorted
label mask
mapped to DVS.
768 × 640 px
(d) Redistorted
label to match
plain DVS data.
(e) Propagated
DVS event labels.
Figure 6: Processing steps to map and propagate label masks to DVS event stream.
(a) All four actors. (b) Masked scene (blended).
(c) Generated label mask. (d) Propagated DVS labels.
Figure 7: Setup during dataset recording (top row) and cor-
responding labels (bottom row).
• cars moving in scene
• wildlife in scene, i.e. birds
Quality 2: corresponds to these minor issues:
• unwanted occlusion, i.e. tree trunks
• one or more person outside of static mask
• incomplete masks, i.e. intersection with static
mask (see Section 5.3)
Quality 1: includes all remaining sequences, i.e. se-
quences without any of the aforementioned issues.
Quality 2 and 3 can be used to get longer sequences
(c.f. supplement to this paper). In the following, we
present quality 1 exclusively. The complete dataset,
including sequences of all three qualities, is available
publicly and free of charge
6
.
6
http://dnt.kr.hsnr.de/DVS-NMuPeTS/
The supplementary material to this paper is also available
for download there.
Table 1: Scenarios.
pattern
primary
parameter
background
(empty scene)
–
single person speed
crossing paths angles of paths, speed
parallel paths
(same directions)
speed, distance
parallel paths
(opposing directions)
speed, distance
occlusions speed, pose
meeting & parting direction
random path speed
helical path –
5.1 Scenarios
We defined a set of scenarios as a protocol for record-
ing and guidance to our actors. Where possible, we
repeated the scenario for each person and all possi-
ble numbers of persons. The scenarios are listed in
Table 1. The order is mostly chronological and cor-
responding to sequence indices. For the majority of
the scenarios, we introduced annotations with a cor-
responding name. The annotations are not exclusive
for certain sequences, e.g. CROSSING will occur fre-
quently during ‘crossing paths’ but also anytime else.
Thus, the scenarios increase the frequency of their
corresponding annotations for their duration.
For the generation of label masks we used α =
10°, σ = 50%, ϕ = 10%, and τ = 10 px.
5.2 Persons & Garment Colors
The recorded persons are pseudonymized in the pro-
vided data by using the color of the suit they were
wearing (see Table 2 as well as Figure 7a and 8).
Some colors are less practical than others in a given
environment. In our case, vegetation tends to be
green-yellowish. Red and blue are well separated.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
296

Table 2: Technical specifications of participating persons.
garment
color
size sex weight
red 1.84m m 70 kg
orange 1.82m m 82 kg
cyan 1.74m f 80kg
blue 1.80m m 65 kg
Figure 8: Overview of the fabrics used. First row: cotton
shoe covers, second row: Morphsuits. Sorted by hue, from
left to right, i.e. red, orange, cyan, and blue.
The choice of orange and cyan, which are close in hue
(see Figure 5), is due to unavailability of differently
colored suits during the time of dataset creation. Fig-
ure 7c shows an automatically generated label mask
in the used setup, while Figure 7d shows the result of
corresponding mapping and propagation to the DVS
view. The supplement provides further examples of
generated label masks for a qualitative overview.
5.3 Static Mask
We used a binary mask to prevent vegetation as well
as uninvolved persons and objects, as described under
‘Quality 3’, from triggering false positives during la-
bel mask generation. Some sequences needed to be
split and marked as quality 2 instead of quality 1 be-
cause one or more person is masked out by the static
mask.
This static mask is only applied to the color frames
from the APS camera. In the dataset, all event data is
unmasked. You can see the mask applied in Figure 7b.
5.4 Annotations
Annotations were made manually and are available
per-color.
The scenario description, used to brief the actors,
and the annotations, describing all included activities,
are directly related to the main challenges of MOT de-
fined in the introduction. We will now briefly discuss
the mapping and explain our annotations.
5.4.1 Background
One annotation not resembling a problem in itself is
BACKGROUND, i.e. an empty scene. This provides
separate recordings only including sensor noise. In
quality 2, some foreign activity can occur.
BACKGROUND: no person with colored garment is
in the scene.
5.4.2 Object Occlusion
Object occlusion can be further divided into occlusion
with infrastructure and occlusion between persons.
Occlusion between persons can happen whenever two
or more persons are in the scene. It is very fre-
quent during CROSSING and SIDEBYSIDE (see Sec-
tion 5.4.5).
OCCLUSION: one or more persons are behind an ob-
stacle.
5.4.3 Similar Shape
All actors are of comparable size and weight. The
person representing CYAN naturally has a different sil-
houette while the remaining persons have a very sim-
ilar figure. This makes distinction by size impractica-
ble and provides a greater challenge for tracking al-
gorithms.
RED, ORANGE, CYAN, BLUE: person with specified
garment color is in scene.
5.4.4 Pose & Movement
Most of the time the actors were upright and walk-
ing. For short durations they were in differing poses.
EXCERCISING is a collection of movement patterns
found in sports. This includes push-ups and burpees
(including jumping). These represent movements
rarely observed in pedestrian monitoring scenes with
high rates of change in movement speed and thus may
pose a challenge for tracking algorithms.
STANDING, WALKING, and RUNNING correspond
to three intervals of speed during bipedalism.
RANDOM is a special case where one actor tries
to move as unpredictable as possible while including
changes of speed and course. This aims at stressing
physical motion models included in many tracking al-
gorithms.
EXERCISING: one or more persons are doing exer-
cise like activity.
KNEELING, STOOPED, WAVING: one or more per-
sons are in the specified pose.
STANDING, WALKING, RUNNING: one or more per-
sons are moving the specified manner.
RANDOM: one or more persons are abruptly chang-
ing direction and speed, including backwards
movement.
N-MuPeTS: Event Camera Dataset for Multi-Person Tracking and Instance Segmentation
297
5.4.5 Interaction
Crossing paths require two persons, but the number
of possible variations is limited. We consider the fol-
lowing patterns to be relevant:
1. person A and person B walk past each other
(CROSSING)
2. person A and person B walk in the same direction
(SIDEBYSIDE)
3. person A or person B change their direction at the
point of intersection (MEET)
Parameters are the angle towards the camera and be-
tween paths, and the speed. With three persons the
possible number of variations increases drastically.
For this dataset, we managed to gather four persons.
CROSSING: the paths of two or more persons are
crossing in temporal proximity.
MEET: two or more persons are meeting and parting
again, paths are converging then diverging.
SIDEBYSIDE: two or more persons are moving side
by side at the same speed.
HELIX: two persons try to circle around each other
so that in a (x,y,t)-diagram, i.e. a 3D plot of the
resulting event point cloud, their paths resemble a
helical path.
5.4.6 Different Sizes
As mentioned before, the actors are of similar size.
Still the projected size varies greatly with distance to
the camera due to perspective. While a person in the
center of the scene has an projected size of approxi-
mately 52 px in the DVS event stream, at the far end
of the scene a person is only 29 px in size. Sequences
with persons at the far end of the scene are marked
with FAR.
In conclusion, persons are included in the dataset
in multiple sizes. Of course, the variation in size cor-
responds directly to the position along the vertical
axis in the stream.
FAR: one or more persons are near the distant foot-
way in the scene.
5.5 Statistics
The dataset subset constituting quality class 1 is sum-
marized in Tables 3, 4, and 5. In these tables, all dura-
tions are given in seconds and rounded to the nearest
integer. The supplement contains detailed informa-
tion for all quality classes and annotations. Overall,
the cumulative duration of sequences in quality 1 is
Table 3: Cumulative durations per color combination in
quality class 1.
cumulative
duration
RED
ORANGE
CYAN
BLUE
per
color
combination
sum per
person
count
300
313
882
158
215
195
213
701
41
125
236
76
9
496
687
123
51
17
350 350
Table 4: Duration statistics per annotation in quality
class 1.
annotation
number of
sequences
mean
duration
cumulative
duration
RED 137 12.5 1713
ORANGE 123 13.6 1671
CYAN 101 14.0 1416
BLUE 77 12.3 946
BACKGROUND 46 6.5 300
STANDING 96 3.3 312
WALKING 441 5.1 2259
RUNNING 107 4.7 504
RANDOM 18 8.9 160
HELIX 9 7.2 64
FAR 35 4.5 157
approximately 56% of the total dataset which equates
to a length of ≈ 2920 seconds.
Table 3 summarizes the durations recorded per
color combination. It can be noted that all possible
color combinations are included. The last column
contains the cumulated durations for 0, 1, 2, 3, and
4 actors active at the same time. Recordings with up
to two or three persons each contribute 24% of the to-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
298

Table 5: Occurrence statistics per annotation in quality
class 1.
annotation
number of
occurences
OCCLUSION 136
EXERCISING 9
KNEELING 13
STOOPED 18
WAVING 9
CROSSING 212
MEET 48
SIDE BY SIDE 94
tal dataset duration. Scenes with one person (≈ 30%)
and with all four persons (≈ 12%), along with empty
background scenes, form the remaining components.
Table 4 gives an overview of the amount of se-
quences and their duration in relation to the assigned
annotations. The cumulative duration is included in
a separate column for convenience. Due to the afore-
mentioned rounding, small discrepancies can occur.
Annotations describing short events in time are in-
stead counted, seeTable 5.
Considering the cumulative duration each actor
is present, RED, ORANGE and CYAN are included in
equal shares. Actor BLUE is slightly less frequent.
According to the natural movement pattern of hu-
mans, the annotation WALKING is included signifi-
cantly more often than others.
6 CONCLUSION
Currently, there is still a lack of publicly available
event-based datasets. This is an obstacle in the de-
velopment and evaluation of event-based image pro-
cessing applications. We have described a software-
processing pipeline and its associated hardware setup
for an automated derivation of multi-person instance
annotations within DVS recordings. By exploiting
color features, highly accurate annotations are gen-
erated. This is even the case in error-prone scenarios
including intersecting movements and occlusions.
Additionally, we published an already ready-to-
use dataset that includes the scenarios and challenges
that arise in the context of multi-person tracking ap-
plications. This dataset can be used for further de-
velopment of event-based algorithms. As this dataset
provides annotations on the level of the individual
output events of the DVS, there are no event encoding
constraints which must be considered. This includes
approaches that operate directly on the 3D (x,y,t)
space-time event cloud of the DVS.
Potential challenges supported by this dataset in-
clude therefore, for example, the application and eval-
uation of 3D cloud-based algorithms for instance seg-
mentation (Yang et al., 2019; Zhao and Tao, 2020)
into the event-based vision. The transition of graph-
based approaches, such as from object detection
(Mondal et al., 2021) and recognition (Li et al., 2021)
within DVS data, to tracking is also a supported and
an interesting topic for further work.
ACKNOWLEDGEMENTS
We thank Hans-Günter Hirsch for his support and par-
ticipation in the recording of the dataset.
Funding
This work was supported by the Federal Ministry
for Digital and Transport under the mFUND pro-
gram grant number 19F1115A as part of the project
‘TUNUKI’.
REFERENCES
Alonso, I. and Murillo, A. C. (2019). EV-SegNet: Seman-
tic Segmentation for Event-Based Cameras. In 2019
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition Workshops (CVPRW), pages 1624–
1633.
Alzugaray, I. and Chli, M. (2018). Asynchronous Cor-
ner Detection and Tracking for Event Cameras in
Real Time. IEEE Robotics and Automation Letters,
3(4):3177–3184.
Berthelon, X., Chenegros, G., Finateu, T., Ieng, S.-H., and
Benosman, R. (2018). Effects of Cooling on the SNR
and Contrast Detection of a Low-Light Event-Based
Camera. IEEE Transactions on Biomedical Circuits
and Systems, 12(6):1467–1474.
Bisulco, A., Cladera Ojeda, F., Isler, V., and Lee, D. D.
(2020). Near-Chip Dynamic Vision Filtering for Low-
Bandwidth Pedestrian Detection. In 2020 IEEE Com-
puter Society Annual Symposium on VLSI (ISVLSI),
pages 234–239.
Bolten, T., Pohle-Fröhlich, R., and Tönnies, K. D. (2021).
DVS-OUTLAB: A Neuromorphic Event-Based Long
Time Monitoring Dataset for Real-World Outdoor
Scenarios. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR) Workshops, pages 1348–1357.
Camuñas-Mesa, L. A., Serrano-Gotarredona, T., Ieng, S.-
H., Benosman, R., and Linares-Barranco, B. (2018).
Event-Driven Stereo Visual Tracking Algorithm to
Solve Object Occlusion. IEEE Transactions on Neu-
ral Networks and Learning Systems, 29(9):4223–
4237.
N-MuPeTS: Event Camera Dataset for Multi-Person Tracking and Instance Segmentation
299

Chen, G., Cao, H., Ye, C., Zhang, Z., Liu, X., Mo, X., Qu,
Z., Conradt, J., Röhrbein, F., and Knoll, A. (2019).
Multi-Cue Event Information Fusion for Pedestrian
Detection With Neuromorphic Vision Sensors. Fron-
tiers in Neurorobotics, 13:10.
de Tournemire, P., Nitti, D., Perot, E., Migliore, D., and
Sironi, A. (2020). A Large Scale Event-based Detec-
tion Dataset for Automotive. arXiv, abs/2001.08499.
Guo, M., Huang, J., and Chen, S. (2017). Live demon-
stration: A 768 × 640 pixels 200Meps dynamic vi-
sion sensor. In 2017 IEEE International Symposium
on Circuits and Systems (ISCAS), pages 1–1.
Hu, Y., Liu, H., Pfeiffer, M., and Delbruck, T. (2016).
DVS Benchmark Datasets for Object Tracking, Ac-
tion Recognition, and Object Recognition. Frontiers
in Neuroscience, 10.
Hu, Y., Liu, S.-C., and Delbruck, T. (2021). v2e: From
Video Frames to Realistic DVS Events. In 2021
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition Workshops (CVPRW), pages 1312–
1321.
Islam, M. Z., Islam, M., and Rana, M. S. (2015). Prob-
lem Analysis of Multiple Object Tracking System: A
Critical Review. International Journal of Advanced
Research in Computer and Communication Engineer-
ing, 4:374–377.
Jiang, Z., Xia, P., Huang, K., Stechele, W., Chen, G., Bing,
Z., and Knoll, A. (2019). Mixed Frame-/Event-Driven
Fast Pedestrian Detection. In 2019 International Con-
ference on Robotics and Automation (ICRA), pages
8332–8338.
Li, Y., Zhou, H., Yang, B., Zhang, Y., Cui, Z., Bao, H., and
Zhang, G. (2021). Graph-based Asynchronous Event
Processing for Rapid Object Recognition. In 2021
IEEE/CVF International Conference on Computer Vi-
sion (ICCV), pages 914–923.
Luo, W., Xing, J., Milan, A., Zhang, X., Liu, W., and Kim,
T.-K. (2021). Multiple Object Tracking: A Literature
Review. Artificial Intelligence, 293:103448.
Marcireau, A., Ieng, S.-H., Simon-Chane, C., and Benos-
man, R. B. (2018). Event-Based Color Segmenta-
tion With a High Dynamic Range Sensor. Frontiers
in Neuroscience, 12.
Miao, S., Chen, G., Ning, X., Zi, Y., Ren, K., Bing, Z., and
Knoll, A. (2019). Neuromorphic Vision Datasets for
Pedestrian Detection, Action Recognition, and Fall
Detection. Frontiers in Neurorobotics, 13:38.
Moeys, D. P., Corradi, F., Li, C., Bamford, S. A.,
Longinotti, L., Voigt, F. F., Berry, S., Taverni, G.,
Helmchen, F., and Delbruck, T. (2018). A Sensitive
Dynamic and Active Pixel Vision Sensor for Color or
Neural Imaging Applications. IEEE Transactions on
Biomedical Circuits and Systems, 12(1):123–136.
Mondal, A., R, S., Giraldo, J. H., Bouwmans, T., and
Chowdhury, A. S. (2021). Moving Object Detection
for Event-based Vision using Graph Spectral Clus-
tering. In 2021 IEEE/CVF International Conference
on Computer Vision Workshops (ICCVW), pages 876–
884.
Mueggler, E., Bartolozzi, C., and Scaramuzza, D.
(2017a). Fast Event-based Corner Detection. In
Tae-Kyun Kim, Stefanos Zafeiriou, G. B. and Miko-
lajczyk, K., editors, Proceedings of the British Ma-
chine Vision Conference (BMVC), pages 33.1–33.11.
BMVA Press.
Mueggler, E., Rebecq, H., Gallego, G., Delbruck, T., and
Scaramuzza, D. (2017b). The Event-Camera Dataset
and Simulator: Event-based Data for Pose Estimation,
Visual Odometry, and SLAM. The International Jour-
nal of Robotics Research, 36(2):142–149.
Nozaki, Y. and Delbruck, T. (2017). Temperature and Para-
sitic Photocurrent Effects in Dynamic Vision Sensors.
IEEE Transactions on Electron Devices, 64(8):3239–
3245.
Ojeda, F. C., Bisulco, A., Kepple, D., Isler, V., and Lee,
D. D. (2020). On-Device Event Filtering with Bi-
nary Neural Networks for Pedestrian Detection Using
Neuromorphic Vision Sensors. In 2020 IEEE Interna-
tional Conference on Image Processing (ICIP), pages
3084–3088.
Pi ˛atkowska, E., Belbachir, A. N., Schraml, S., and Gelautz,
M. (2012). Spatiotemporal multiple persons tracking
using dynamic vision sensor. In 2012 IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition Workshops, pages 35–40.
Taverni, G., Paul Moeys, D., Li, C., Cavaco, C., Motsnyi,
V., San Segundo Bello, D., and Delbruck, T. (2018).
Front and Back Illuminated Dynamic and Active Pixel
Vision Sensors Comparison. IEEE Transactions on
Circuits and Systems II: Express Briefs, 65(5):677–
681.
Voigtlaender, P., Krause, M., Osep, A., Luiten, J., Sekar,
B. B. G., Geiger, A., and Leibe, B. (2019). MOTS:
Multi-Object Tracking and Segmentation. In 2019
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 7934–7943.
Xu, Y., Zhou, X., Chen, S., and Li, F. (2019). Deep Learn-
ing for Multiple Object Tracking: A Survey. IET Com-
puter Vision, 13(4):355–368.
Yang, B., Wang, J., Clark, R., Hu, Q., Wang, S., Markham,
A., and Trigoni, N. (2019). Learning Object Bound-
ing Boxes for 3D Instance Segmentation on Point
Clouds. In Wallach, H., Larochelle, H., Beygelzimer,
A., d'Alché-Buc, F., Fox, E., and Garnett, R., editors,
Advances in Neural Information Processing Systems,
volume 32. Curran Associates, Inc.
Zhao, L. and Tao, W. (2020). JSNet: Joint Instance and
Semantic Segmentation of 3D Point Clouds. Proceed-
ings of the AAAI Conference on Artificial Intelligence,
34(07):12951–12958.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
300
