
Automatic Facility Layout Design System Using Deep Reinforcement
Learning
Hikaru Ikeda, Hiroyuki Nakagawa and Tatsuhiro Tsuchiya
Institute of Information Science and Technology, Osaka University, 1-5 Yamadaoka, Suita, Osaka, Japan
Keywords:
Deep Reinforcement Learning, Machine Learning, Layout Design, Facility Layout Problem, Analytic
Hierarchy Process.
Abstract:
Facility layout designing aims to deploy functional objects in appropriate locations within the logistics facil-
ities and production facilities. The designer’s ability to create a layout is a major factor in the quality of the
layout because they need to satisfy functional requirements like lead time, relations among functional objects
to deploy and material handling costs. In this paper, a deep reinforcement learning (RL) based automatic lay-
out design system is developed. Deep Q-Networt (DQN) is introduced to solve facility layout problem (FLP)
by the adaptability of RL with the expression of deep neural networks. We apply the developed system to the
existing FLP and compare the layout result with conventional RL based system. Consequently, the perfor-
mance improvement was confirmed in terms of the relations among units in the created layout comparing to
the RL based system.
1 INTRODUCTION
Facility layout designing aims to create high work
efficiency layouts in facilities. The designer’s abil-
ity to create a layout is a major factor in the quality
of the layout. This problem is known as the facility
layout problem (FLP) (Kusiak and S.Heragu, 1987).
FLP is optimization problems of deploying equip-
ment and machines in logistics facilities and produc-
tion facilities with consideration of lead time, rela-
tions among functional objects to deploy and mate-
rial handling costs. The computational complexity of
FLP is NP-hard. Therefore meta-heuristic methods
like genetic algorithms or simulated annealing are the
mainstream.
In this study, we developed a layout design sys-
tem that can create layouts using deep reinforcement
learning (RL). RL (Kaelbling et al., 1996) is a ma-
chine learning method that learns behavior through
trial-and-error interactions by the system itself. Ma-
chine learning methods are generally classified into
three types: supervised learning, unsupervised learn-
ing and reinforcement learning. While supervised and
unsupervised learning methods’ agents require train-
ing data for learning, reinforcement learning agents
obtain the data generated from its own experience.
Lately self-supervised learning and semi-supervised
learning become major methods. Developers of re-
inforcement learning system create a high learning
efficiency model instead of preparing learning data.
Reinforcement learning agents learn the behavior to
maximize the objective score in the environment. The
series of actions in the learning follow the Markov
decision process (Liu et al., 2017). The Markov deci-
sion process has the characteristic that the probability
distribution of the future state depends only on the
current state and not on all past states, which is called
the Markov property.
Deep RL (Arulkumaran et al., 2017) is a learning
method that combines deep learning and reinforce-
ment learning. Deep learning learns by using neural
networks that reproduce human brain cells with high
processing power. Deep RL can handle more com-
plex problems than RL because of using the Neural
Network. Convolutional Neural Network (CNN) is a
type of deep learning model for processing data that
has a grid pattern, such as images (Yamashita et al.,
2018). DQN (Lee et al., 2021) is the most common
deep RL method using CNN.
The object of this study is to clarify the effective-
ness of DQN for FLP compared with RL. More effi-
cient layouts can be created by using DQN method.
We conducted some experiments to demonstrate the
effectiveness of the developed system. Consequently,
the performance improvement was confirmed in terms
of the relations among units in the created layout com-
Ikeda, H., Nakagawa, H. and Tsuchiya, T.
Automatic Facility Layout Design System Using Deep Reinforcement Learning.
DOI: 10.5220/0011678500003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 2, pages 221-230
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
221

paring to the RL based system.
The structure of this paper proceeds as follows.
Section 2 explains deep RL, the layout design, current
problems, and Analytic Hierarchy Process (AHP) as
the background of this study. Section 3 explains the
layout design mechanism using DQN and AHP. Sec-
tion 4 describes the results of the experiments. Sec-
tion 5 describes the discussion according to the exper-
iments presented in Section 4. Section 6 concludes
the paper.
2 BACKGROUND
2.1 Deep RL
Deep learning has significantly influenced many ar-
eas in machine learning and dramatically improved
in speech recognition, visual object recognition, ob-
ject detection and many other domains such as drug
discovery and genomics (LeCun et al., 2015). Deep
learning has become advance in RL, with the use
of deep learning algorithms within RL defining the
field of Deep RL. Many of the successes in Deep
RL have been based on scaling up prior works in RL
to high dimensional problems. This is due to the
learning of low-dimensional feature representations
and the powerful function approximation properties
of neural networks. Neural networks can be used as
components of RL agents, allowing them to learn di-
rectly from high dimensional inputs. In general, Deep
RL is based on training deep neural networks to ap-
proximate the policy or value functions (Arulkumaran
et al., 2017). In the field of DRL, there have been
outstanding success cases. Volodymyr et al. (Mnih
et al., 2015) developed an algorithm that could learn
to play Atari 2600 video games at a extraordinary
level. David et al. (Silver et al., 2016) developed Al-
phaGo and defeated a human world champion in Go.
2.2 Layout Design
The FLP is a combinatorial optimization problem
which arises in a variety of problems such as layout
design of the deployment and flow lines of equipment,
materials, parts, work-in-process, workers, circuit
board design, warehouses, backboard wiring prob-
lems (S.P.Singh and R.R.K.Sharma, 2006). Creating
an appropriate layout can improve material handling
costs and lead time. Facility layout design has been
studied for a long time (Tam, 1992). GA (Thengade
and Dondal, 2012) and GP (Espejo et al., 2010) based
studies are generally conducted. GA is a program-
ming technique which forms its basis from the bio-
logical evolution. GA uses the principles of selection
and evolution to produce several solutions to a given
problem. GP is considered to be a variant of GA,
and used to evolve abstractions of knowledge. Jos
´
e
et al. (Gonc¸alvesa and G.C.Resende, 2015) intro-
duced biased random-key GA for the unequal area fa-
cility layout problem where a set of rectangular facil-
ities with given area requirements has to be deployed,
without overlapping. The role of GA is to evolve the
encoded parameters that represent the facility deploy-
ment sequence, the vector of facility aspect ratios, and
the position of the first facility. Venkatesh and Jim
(Dixit and Lawlor, 2019) use GA to reduce the sum of
the product of the three factors of material handling
cost: the volume of material handling (frequency of
journeys), the cost of material handling, and the dis-
tance travelled. Singh et al. (D.Meller and A.Bozer,
1997) introduced a layout generating method using
the space-filling curve. The space-filling curve de-
scribes plane spaces based on the trajectory of an in-
dividual curve. The layout was created by allocating
the required area using the space-filling curve of the
site. Stanislas (Chaillou, 2019) introduced to apply
AI to floor plans analysis and generation. His ultimate
goal is three-fold: to generate floor plans, to qualify
floor plans and to allow users to browse through gen-
erated design options. He have chosen nested Gener-
ative Adversarial Neural Networks or GANs. Luisa
et al. (Vargas-Pardo and Giraldo-Ramos, 2021) in-
troduced Firefly algorithm (FA), which is designed
to solve continuous optimization problems. From the
map of the layout that contains the (x, y) coordinates
corresponding to the location of each of the nodes
or workstations that are distributed on the plant, and
paths between nodes, the system solves layout prob-
lem as traveling salesman problem (TSP). Jing et al.
(fa and JunLiu, 2019) introduced the ant colony op-
timization (ACO) algorithm, which is a bio-inspired
optimization algorithm based on the behavior of nat-
ural ants that succeed in finding the shortest paths
from their nest to food sources by communicating via
pheromone trails.
Several studies have been conducted on RL and
space control problems, including FLP. Peter et al.
(Burggraf et al., 2021) described the recent surge of
research interest in Artificial Intelligence. They re-
gard machine learning techniques including RL as
the most promising approach to facility layout re-
search. In our previous study (Ikeda et al., 2022),
we developed facility layouts creation mechanism us-
ing Monte Carlo (MC) method, which is a method of
RL. In our mechanism, states are represented by the
size and the maximum rectangular in the remaining
area, and actions are represented by the size of the
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
222

unit that fits the site. The mechanism was applied to
existing layout problem and the effectiveness of RL
to FLP is demonstrated. Richa et al. (Verma et al.,
2019) introduced RL framework for selecting and se-
quencing containers to load onto ships in ports. Their
goal is to minimize the number of crane movements
required to load a ship. We can regard the problem
as an assignment problem in which the order of as-
signments is important and therefore the reward is
dependent of the order. Azalia et al. (Mirhoseini
et al., 2021) introduced a graph deployment method
using RL, and demonstrate latest results on chip floor-
planning. They show that their method can generate
chip floor-plans that are comparable or superior to hu-
man experts in under six hours, whereas humans take
months to produce acceptable floor-plans for modern
accelerators. Ruizhen et al. (Hu et al., 2020) intro-
duced the transport-and-pack (TAP) problem, a fre-
quently encountered instance of real-world packing.
They developed a neural optimization solution using
RL. Given an initial spatial configuration of boxes,
they seek an efficient method to iteratively transport
and pack the boxes compactly into a target container.
Amine et al. (Izadinia et al., 2014) developed a Mixed
Integer Programming (MIP) robust model for a form
of multi-floor layout problem. In the experiment, they
created facility layouts considering the relation be-
tween the cellar containing main storages and upper
floors in which departments will be located in prede-
termined locations.
Some studies about space control using deep RL
have also been conducted. Matthias et al. (Klar et al.,
2021) study the layout for four functional units next
to the logistic lane where the material is transported
by vehicles using double deep Q-learning (DDQL)
method. Their layout is generated to be optimized
regarding a single planning objective, i.e., the trans-
portation time. Xinhan et al.(Di et al., 2021) intro-
duced a method of searching for an appropriate de-
ployment while moving furniture in a room using a
deep Q-Network (DQN). This method can arrange
one piece of furniture so as not to interfere with the
function of the room. They also explore the interior
graphics scenes design task as a Markov decision pro-
cess using deep RL (Di and Yu, 2021). Their goal is to
generate an accurate layout for the furniture in the in-
door graphics scenes simulation. L
´
opez et al. (L
´
opez
et al., 2020) developed a virtual reality application
that creates a production line for electric drills in a vir-
tual space using deep RL. Their PCG method can re-
duce the resources required for development and can
personalize the 3-Dimentional virtual environments.
Goal
Evaluation
criterion 1
Evaluation
criterion 2
Evaluation
criterion N
Alternative
2
Alternative
K
・・・
Alternative
3
Alternative
1
・・・
Goal
Evaluation
criteria
Alternatives
Figure 1: General example of AHP hierarchy.
2.3 Analytic Hierarchy Process (AHP)
Analytic Hierarchy Process (AHP) (Lima et al.,
2019), originally proposed by Saaty (1980), is one of
Multi-Criteria Decision Making (MCDM) procedures
that create a hierarchy for the decision divided into
levels. AHP is used widely in various fields because
of its simplicity. First, the decision criteria are hier-
archized by dividing them into three elements: goals,
evaluation criteria, and alternatives. Second, the im-
portance of each evaluation criterion in terms of the
goals is calculated and the importance of the alterna-
tives in terms of the evaluation criteria is calculated.
Finally, from these calculations, the importance of the
alternative in terms of the goals is calculated and the
weight of each alternative can be determined. The
scale for comparison is called the Saaty scale and is
quantitatively rated between 1 and 9. 1 is of equal im-
portance and the closer to 9, the more important it is.
The closer it gets to 1/9, the less important it becomes.
Fig.1 shows a general example of an AHP hierarchy.
A goal, N evaluation criteria and K alternatives are
set. First, which evaluation criteria are prioritized for
the goal is calculated. Second, which alternative is su-
perior in each evaluation criterion is calculated. These
two priorities are used to calculate the weight of each
alternative in terms of the goal. The feature of AHP is
that the priority of each alternative can be easily cal-
culated even if the number of evaluation criteria and
alternatives increases.
Several studies have been widely conducted on
combinatorial optimization problems using AHP. Es-
pecially, AHP is often used together with GA. Lin-
feng et al. (Bai et al., 2009) introduced AHP and GA
for agile supply chains. They use AHP to evaluate
the each supplier using the weigh value of time, cost,
quality and service. Ying et al. (Zeng et al., 2010) in-
troduced AHP and GA for Electric power equipment
maintenance schedule optimization. They use AHP
to evaluate the maintenance items based on reliability
object and economic object. Ke et al. (Wang et al.,
2022) AHP and GA for robotic polishing process
Automatic Facility Layout Design System Using Deep Reinforcement Learning
223
sequencing aiming at satisfying polishing sequence
rules and the shortest polishing time simultaneously.
They use 4 levels hierarchy AHP to generate a fitness
function to evaluate both polishing time and polish-
ing rules. Hossein et al. (Yousefi et al., 2021) studied
the integration of a hybrid combined cooling, heating
and power CCHP system into a commercial building.
They considered three objective functions to cost sav-
ing, energy saving and emission reduction, and con-
sidering each objective function, the GA optimization
is applied in three approaches as a single objective op-
timization problem. Then, the most profitable answer
is determined from the three answers achieved in the
optimization process using AHP.
Besides, some studies used AHP with Deep RL
methods to solve the problems. Guoqing et al. (Wang
and Wang, 2020) introduced AHP combined with
DQN (AHP-DQN) because if reinforcement learning
is adopted, there will be too many state action groups
(S, A), and the traversal is very difficult, which leads
to the failure of the algorithm. Jianxi and Liutao
(Chen et al., 2020) introduced AHP-DQN framework
to solve low terminal storage capacity and diversifed
network service problems of mobile edge computing
tasks.
In this study, AHP is introduced to create a layout
that considers the relations among the units.
3 LAYOUT DESIGN SYSTEM
We develop a layout design system using a DQN as
a solution for FLP. An agent in the system arranges
units on a flat site and creates a layout. This section
explains the environment settings and algorithms of
the system.
Variables used in the paper are defined as follows:
• s
k
: state.
• a
k
: action.
• u
k
: unit.
• r(s
k
): reward.
• return
k
: return.
• V
k
(s
k
,a
k
): Action-value when the agent take ac-
tion a
k
in state s
k
.
• γ: discount factor.
• relation
k
: relation.
• d
k
: Manhattan Distance between units with rela-
tion Relation
k
.
• intensity
k
: intensity of relation of Relation
k
.
• AHP
eva
(u
k
): AHP evaluator.
1 1 0 0→3 0→3
1 1 0 0→3 0→3
2 2 2 0→3 0→3
2 2 2 0 0
0 0 0 0 0
3 3
3 3
3 3
Figure 2: A 2*3 unit deployment on a 5*5 site.
• val(u
k
): evaluation value of u
k
.
• w: combination rate
The system assumes the following constraints.
1. Each functional space of the facility is modeled as
a unit.
2. All of the units are represented as rectangles. The
agent creates one-floor layout, not multi-floor lay-
out.
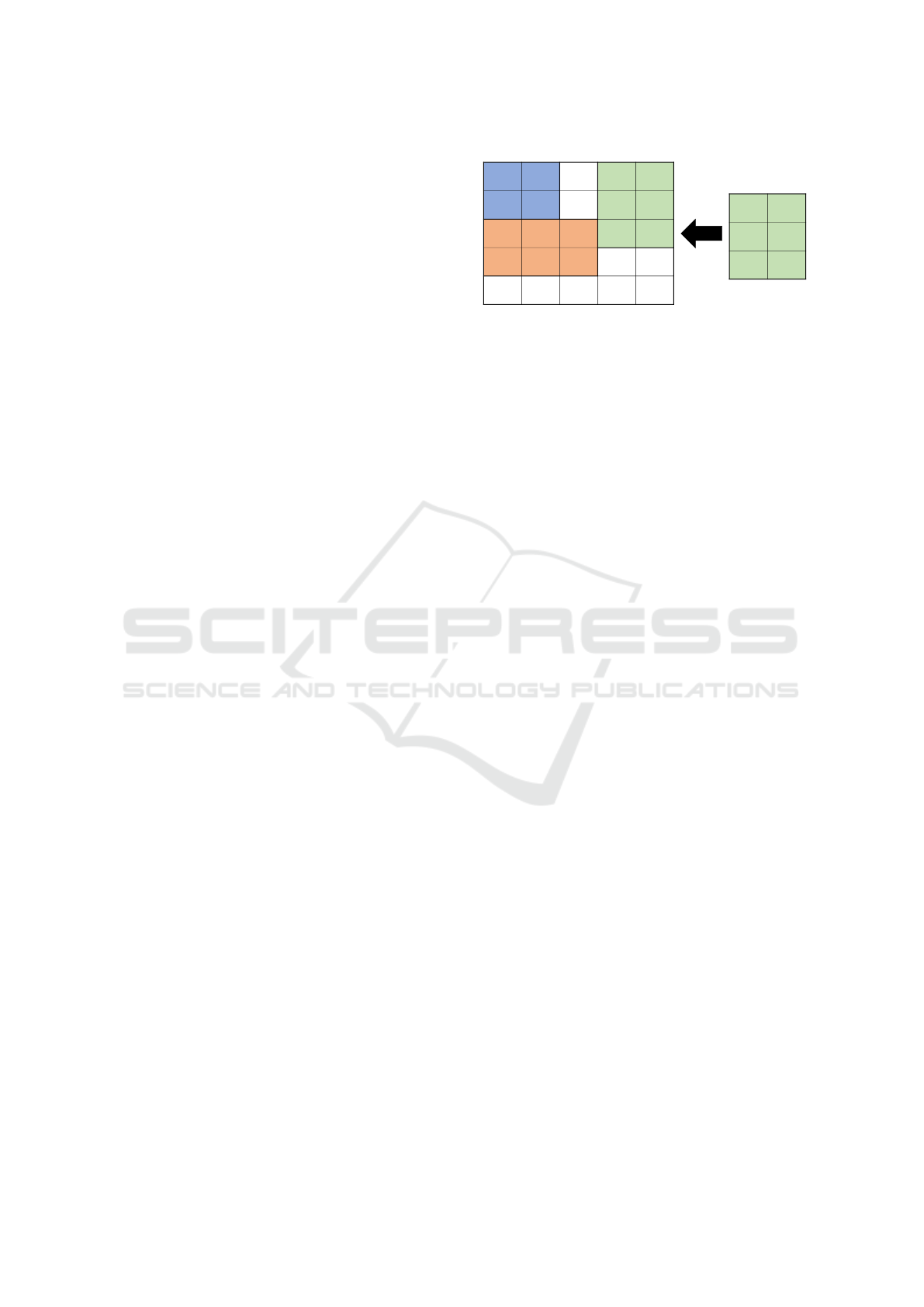
3. The state of the site is represented as shown in
Fig. 2. Deployed areas are represented by a
number that identifies the deployed unit, and non-
deployed areas are represented by 0. Fig. 2 rep-
resent an example of a 2*3 unit deployment on a
5*5 site. Areas where Unit 3 (green unit) is de-
ployed will be changed from 0 to 3.
4. Units can be deployed with a 90-degree-rotated.
5. The relation relation
k
is expressed in the form
(u1
k
, u2
k
, intensity
k
) and is given in advance
when creating the layout.
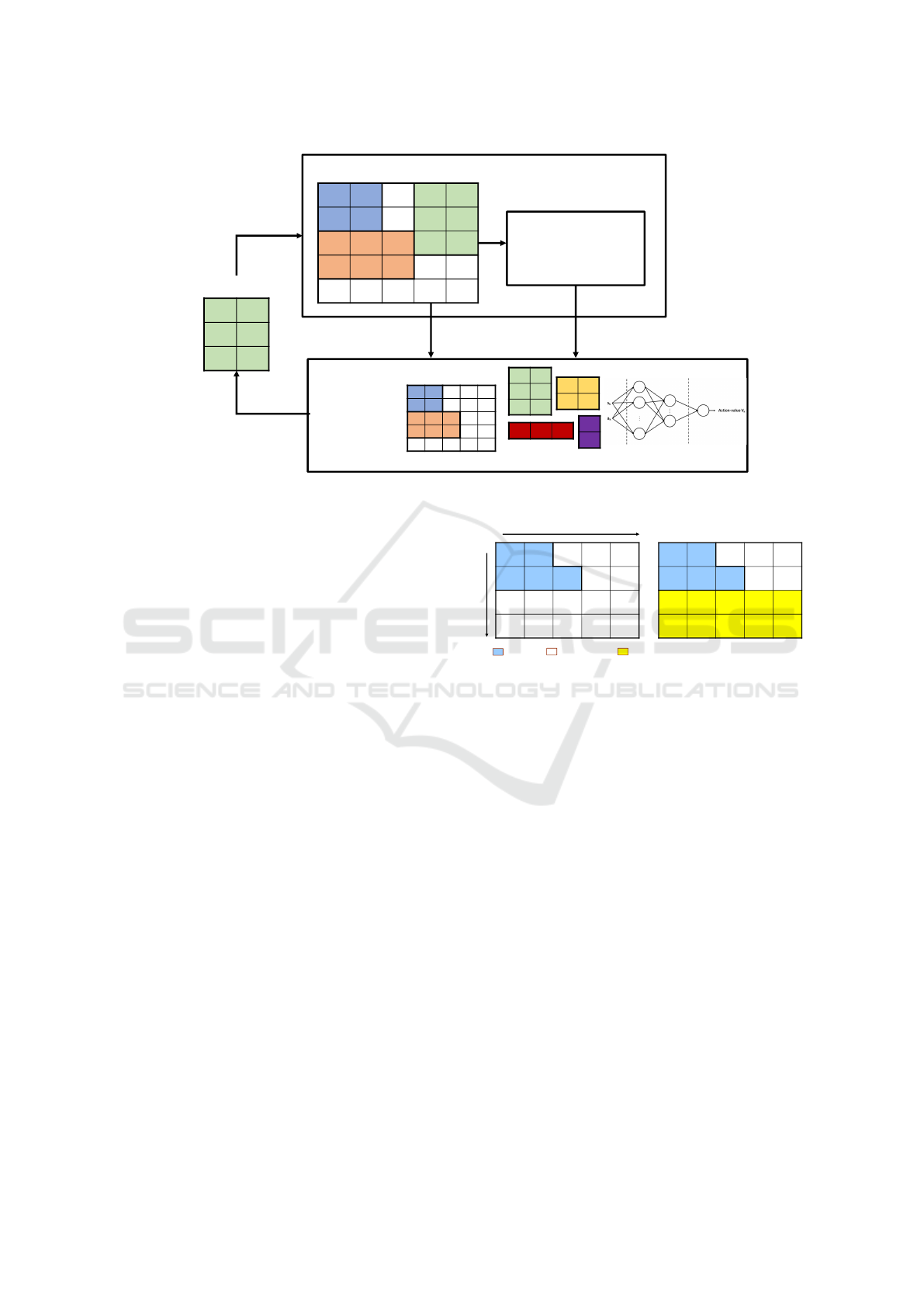
3.1 Learning Environment
The learning environment provides the necessary
learning situations to the agent. Learning environ-
ment for the agent is represented in Fig. 3. The learn-
ing agent includes the following elements:
• state: situation which the agent is located.
• action: what the agent does in a state.
• action-value function: a function that represents
the value of actions in the current state.
• reward: value obtained by an action of the agent.
• return: sum of rewards that can be earned in the
future.
• policy: guidelines for choosing actions.
States are represented by the deployment of the units
on the site, and a site with length n and width m is
represented by a grid with n ∗ m positions. Actions
are represented by units to be deployed. In DQN,
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
224
1 1 0 0→3 0→3
1 1 0 0→3 0→3
2 2 2 0→3 0→3
2 2 2 0 0
0 0 0 0 0
Selected action
3 3
3 3
3 3
Learning environment
1 1 0 0 0
1 1 0 0 0
2 2 2 0 0
2 2 2 0 0
0 0 0 0 0
State
Reward and return
calculation
return
k
= r
k+1
+ γ ∗ return
k+1
New state
Return
Agent
3 3
3 3
3 3
4 4
4 4
5 5 5
6
6
Non-deployed unit
Action-value function
ε-greedy method
Policy
Figure 3: Learning environment and agent in the proposed system.
Action-value function is approximated by the CNN.
The CNN consists of an input layer with two inputs,
an output layer with one output, and two hidden lay-
ers. The two inputs are state and action, and the
output is the action-value. Eight 5*5 size convolu-
tional filters are prepared, and the rectified linear unit
(ReLU) function, which simply computes the func-
tion: f(x) = max(0, x), is used as activation function.
In general, the more hidden layers increase, the more
complex the analysis is. In our system, the number of
nodes in the first hidden layer is 512 and in the second
hidden layer is 256.
The action-value is updated using the return com-
puted by the formula 1.
return
k
= r
k+1
+ γ ∗ return
k+1
(1)
γ is a discount factor which means a parameter that
express the influence on the return in future state. Re-
wards is determined according to the total size of de-
ployed units. If a 2*3 unit is deployed, 6 is given
as a reward. ε-greedy method (Yang et al., 2021) is
used as unit selection policy. In the ε-greedy method,
the agent selects a random unit with a probability of
ε, which is called exploration, and selects a unit with
the highest action-value with a probability of 1 - ε,
which is called exploitation. The ε-greedy method
can choose unlearned actions in exploration that will
never choose in exploitation.
Unlike Go (Silver et al., 2016) or Shogi (Gold-
waser and Thielscher, 2018), it is difficult to deter-
mine the deployment of units on a site because there
are various sizes of units. We use a starting point to
solve this problem. The starting point is set according
8
(0,0)
: deployed : non-deployed : maximum rectangle
(0,0)
(0,2)
Starting
Point
Starting point
• The agent searches the site and defines the next
starting point as the point that forms the maximum
rectangle with no units located
x
y
Figure 4: The start point decision in the present site.
to the current states, and the units are deployed based
on the starting point. The agent searches the site and
defines the next starting point as the point that forms
the largest rectangle with no units located. The first
starting point is set to the origin (0, 0). Fig. 4 shows
an example of the starting point change. The blue area
is already deployed, and the white area is empty. In
Fig. 4 the point (0, 2) is chosen as the next starting
point because the largest rectangle 2*5 can be formed
starting from the point (0, 2).
The following evaluation function P
sum
calculates
distance-intensity in the created layout.
P
sum
= Σ
n
k=1
intensity
k
∗ d
k
(2)
intensity
k
is the intensity of relation
k
between u1
k
and u2
k
. d
k
is the Manhattan distance between u1
k
and u2
k
. Minimizing the evaluation function optimize
the unit deployment in considering relations.
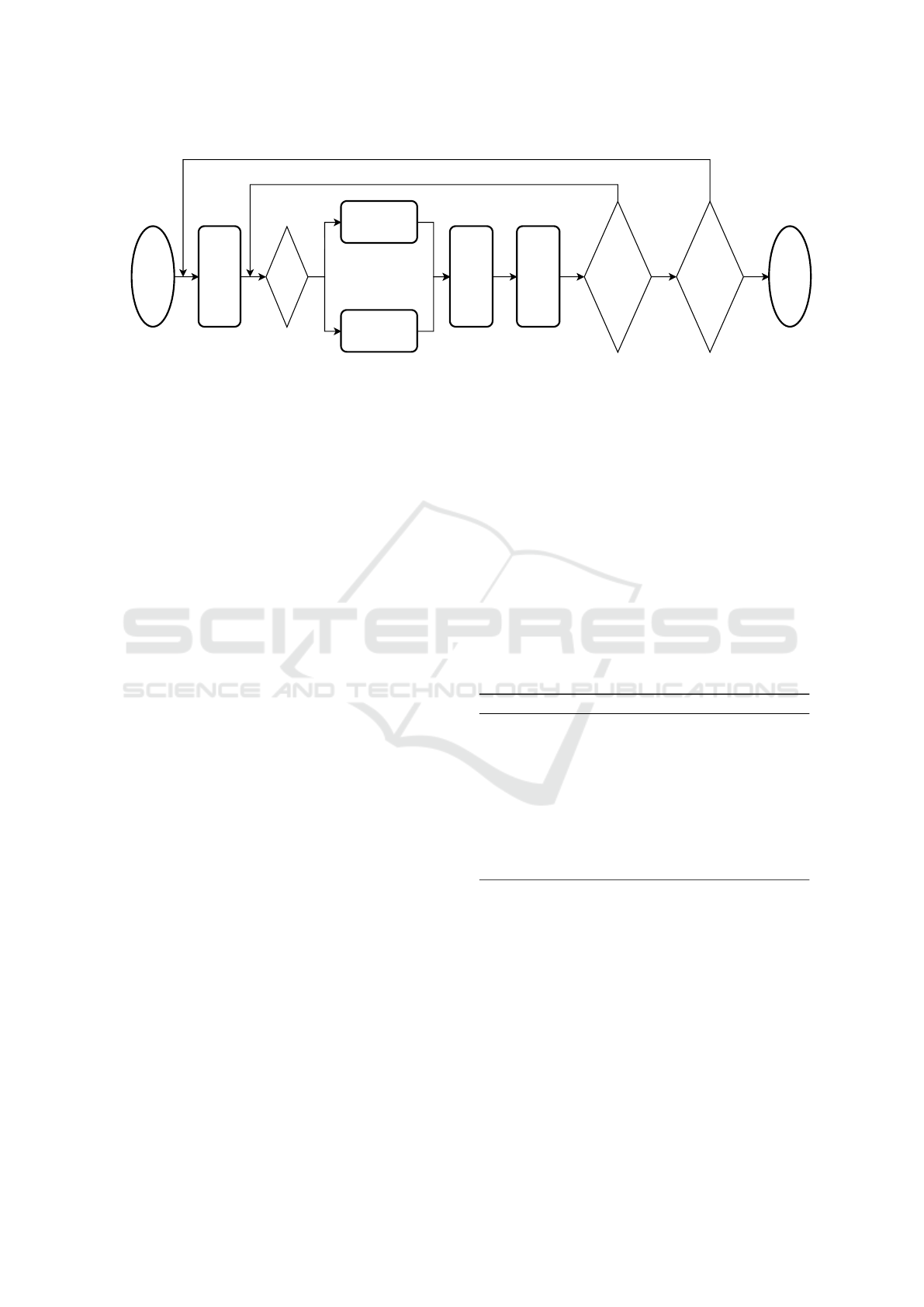
3.2 Learning Mechanism
In this section, we explain the learning procedure of
the proposed system. Fig. 5 shows the flow of a learn-
Automatic Facility Layout Design System Using Deep Reinforcement Learning
225
Start
Generate
units for
learning
Yes
No
N<=ε
Exploration
Exploitation
Deploy
the
selected
unit
Update
the CNN
using the
gained
reward
Yes
No
Did the
agent try to
deploy
all units?
Yes
No
Did the
agent repeat
a specified
number of
trials?
End
Figure 5: Flow of a learning episode.
ing episode. First, the agent generates a set of units.
The agent then chooses a unit to be deployed from
the set using ε-greedy method. The agent generates a
random number N and selects exploration or exploita-
tion according to the threshold ε. When exploration is
selected, the agent selects a unit randomly. When ex-
ploitation is selected, the agent selects a unit with the
highest action-value. Third, the agent deploys the unit
based on the present starting point, and changes the
staring point according to the new state. Finally, the
agent updates the action-value function correspond-
ing to the current state and the chosen action using
the gained reward. The agent continues this proce-
dure until all of the units are tried to be deployed.
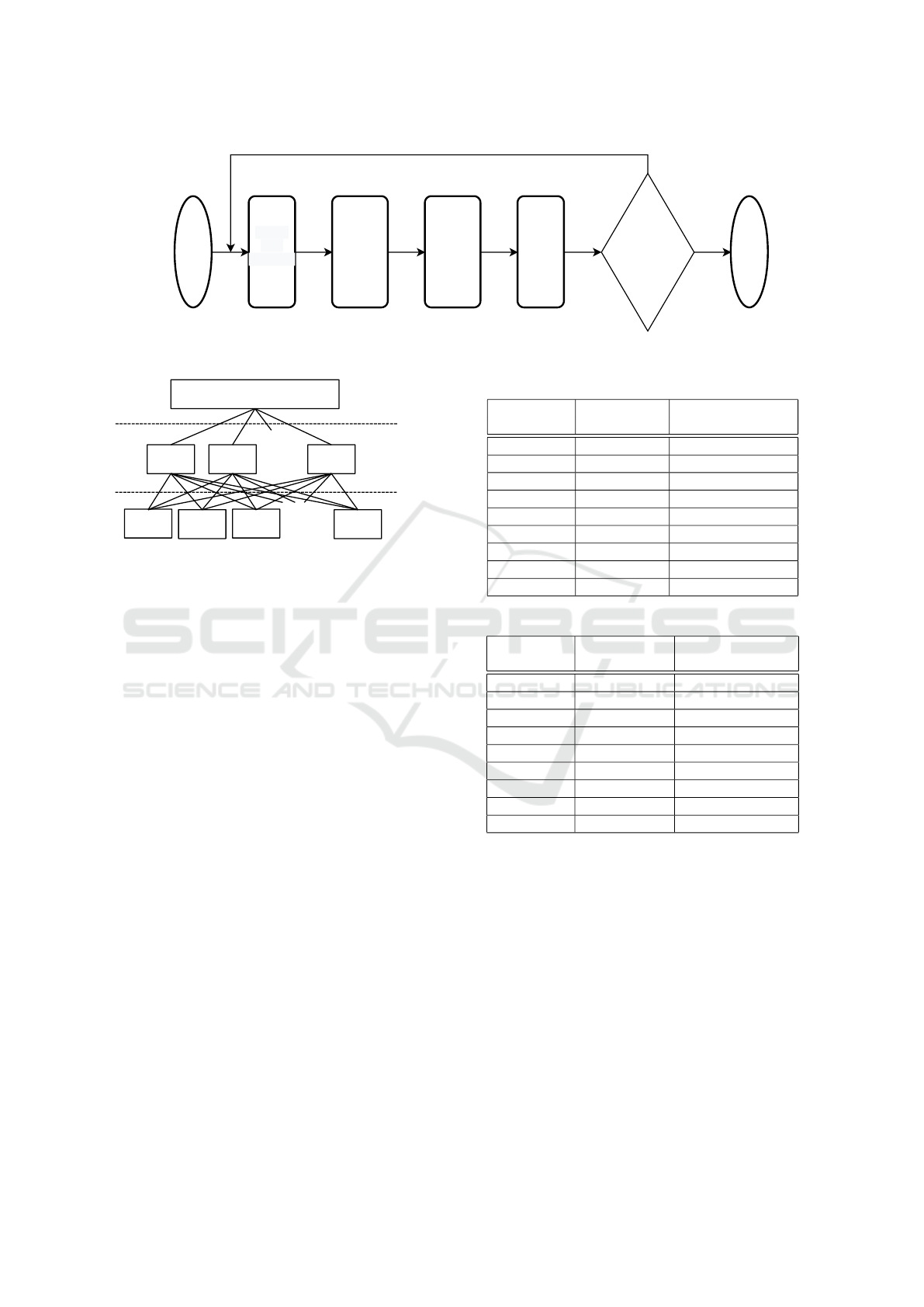
3.3 Layout Creation Mechanism
In this section, we explain the layout creation proce-
dure of the proposed system. Fig.6 shows the flow of
a layout creation. First, the agent generates an AHP
evaluator for each non-deployed unit. The AHP eval-
uator corresponds to the function of evaluating each
alternative in AHP. In the proposed system, the AHP
evaluator is generated to determine the deployment
priority of unit regarding the relation among units.
The AHP structure in the system is shown in Fig. 7.
The AHP is hierarchized into goals, evaluation crite-
ria, and alternatives. The goal is to find the unit that
has the strongest relation to deployed units. The eval-
uation criterion is the sum of distance-intensity ob-
tained when that unit is deployed. The alternative is
the non-deployed unit. Algorithm 1 generates an AHP
evaluator called AHP
eva
for finding the most suitable
unit to be deployed at the current state. N is the num-
ber of relations and U is the number of units. First, the
agent calculates for relation
i
(u1
i
, u2
i
, intensity
i
) be-
tween the deployed unit u1
i
and a non-deployed unit
u2
i
. The agent evaluates the deployment of u2
i
at the
current starting point by the formula listed in line 3 of
Algorithm 1. The evaluation is realized by calculating
the sum of the product of the Manhattan distance be-
tween u1
i
and u2
i
, denoted as d
i
, and the intensity of
the relation between them, donated as intensity
i
. The
value of AHP
eva
(u2
i
), which is the sum of evaluation
of u2
i
, calculated according to the formula listed in
line 7 of Algorithm 1.
The agent combines the evaluation of learning re-
sult and the evaluation of the AHP evaluator in ra-
tio of w to 1 - w. The unit with the highest evalua-
tion is selected, and deployed on the current starting
point. The agent continues this procedure until all of
the units are deployed. By following the above proce-
dure, the agent created a layout that fulfills the given
site. The layout reflects the learning result and the
relations among units.
Algorithm 1: Generate the AHP evaluator.
1: for i = 0 to N − 1 do
2: if relation
i
is the relation between deployed
unit u1
i
and non-deployed unit u2
i
then
3: val(u2
i
)+ = intensity
i
∗ d
i
4: end if
5: end for
6: for k = 0 to U − 1 do
7: AHP
eva
(u
k
) =
∑
U−1
j=0
val(u
k
)/val(u
j
)
8: end for
4 EXPERIMENT
We conducted an experiment to demonstrate the ef-
fectiveness of developed system for solving FLP. We
applied two systems to the sets of units and relations
in the benchmark problems (D.Meller and A.Bozer,
1997) and compared the results:
• DQN
• Q-leaning
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
226
Start
Create
AHP
evaluator
Combine
AHP
evaluator
and
action-
value
function
Select
units using
combined
values
Deploy
the unit
Yes
No
Did the
agent try to
deploy
all units?
End
Figure 6: Flow of one layout creation.
Finding a unit that has the strongest
relation to other non-deployed units
Relation
1
Relation
2
Relation
N
Unit 2 Unit K
・・・
・・・
Unit 3Unit 1
・・・
Goal
Evaluation
criteria
Alternatives
Figure 7: AHP structure of the system.
The system using Q-leaning is mechanism in our pre-
vious study based system that uses Q-leaning method
(WATKINS and DAYAN, 1992) instead of Monte
Carlo method. Russell and Yavuz’s study (D.Meller
and A.Bozer, 1997) illustrates layouts that deploy
units using a space-filling curve (R.Butz, 1969). The
space-filling curve describes plane spaces based on
the trajectory of an individual curve. For this exper-
iment, we used python 3.9 and tensorflow 2.10. The
variables ε used in the ε-greedy method and the dis-
count factor γ used in the learning value calculation
are ε = 0.9 and γ = 0.9, respectively.
The result of layout creation of each method is
shown in Figures 8 and 9. Table 1 shows the values of
the evaluation function P
s
um for each layout. In Fig.
9 and 8, units of the same color in a layout represent
that they are strongly related to each other. Both sys-
tem create layouts that fulfill the site with a given set
of units.
To compare the learning systems of DQN and
RL in another method, we measured the success rate
when the order of set of units is changed. Layout cre-
ation was performed in 100 different orders of units.
Fig. 10 and Table 2 shows the number of trials layouts
that fulfill the site were created.
Table 1: The values of the evaluation function.
combination P
sum
of P
sum
of
rate w DQN method Q-Learning method
0.1 165,415.0 199,616.0
0.2 156,648.0 201,721.5
0.3 152,243.5 191,852.0
0.4 149,327.0 190,114.5
0.5 146,259.5 188,282.5
0.6 150,178.5 183,905.0
0.7 142,791.5 185,510.5
0.8 144,332.0 180,138.0
0.9 139,525.0 175,487.5
Table 2: Success rate in each combination rate.
combination success rate of success rate of
rate w DQN method Q-learning method
0.1 0.34 0.21
0.2 0.34 0.24
0.3 0.32 0.17
0.4 0.27 0.17
0.5 0.31 0.16
0.6 0.26 0.13
0.7 0.25 0.16
0.8 0.22 0.14
0.9 0.21 0.14
5 DISCUSSION
In Table 1, the Psum value of developed system is
smaller than the system using Q-leaning. This result
shows that DQN improved performance in consider-
ing the relations among the units. The agent can set
the unit deployment of the site to state by approx-
imating the action-value function by the CNN. The
learning results with CNN presume to be able to se-
lect units that are more suited to the situation than Q-
leaning. At the same time, Fig. 10 shows that the
P
s
um values decrease as w is increased. As the Psum
value is smaller, relations among units are better con-
sidered in the layout. Accordingly, the experimental
Automatic Facility Layout Design System Using Deep Reinforcement Learning
227

22 22 22 22 22 23 23
24 24 24 37 6 23 23
24 24 24 38 6 23 23
12 36 39 35 6 7 20
40 40 40 40 6 7 21
40 40 40 40 25 9 21
29 29 3 3 25 34 21
29 29 2 2 25 8 21
29 29 2 2 16 16 21
26 11 13 13 18 18 32
26 11 13 13 18 18 31
1 1 17 19 19 14 14
1 1 17 19 19 4 4
1 1 10 10 28 27 27
15 5 33 30 28 27 27
Figure 8: Created layout using QL method.
40 40 40 40 1 1 1
40 40 40 40 1 1 1
6 9 10 10 3 2 2
6 25 25 25 3 2 2
6 26 26 38 24 24 24
6 36 11 11 24 24 24
21 21 21 21 21 32 33
20 4 13 13 7 7 37
31 4 13 13 35 19 19
27 27 18 18 39 19 19
27 27 18 18 8 16 16
23 23 5 12 15 30 34
23 23 14 17 29 29 29
23 23 14 17 29 29 29
28 28 22 22 22 22 22
Figure 9: Created layout using DQN method.
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
The success rate of creating layouts
that fulfill the site.
Combination ratio w
DQN
Q-learning
Figure 10: Success rate in each combination rate.
results indicate that AHP is effective for considering
the relations among units in the layout.
In Russell and Yavuz’s (D.Meller and A.Bozer,
1997) study, users cannot specify the shape of the unit
because the agent assigns and deploys the location of
the unit on the site using the value of the unit. On the
other hand, our developed system can deploys units
using their shape specified by the user.
A comparison of the two graphs in Fig. 10 and
table 2 shows that DQN improves the success rate of
layout at all combination rates. This result may be at-
tributed to the high expressive power of CNN, which
can express action-values more relevant to the agent’s
states and actions.
On the other hand, some limitations exist in this
study. First, we only tried to apply our developed sys-
tem to the sets of units and relations in the benchmark
problems. Therefore, our developed system may not
create layouts in larger and more complicated condi-
tions, such as a real factory. We need to develop a
system that can adapt to multi-floored sites and much
larger sites. Second, the developed system cannot
create a layout under a layout environment using the
agent trained under the another environment. We have
to change the agent’s state and CNN settings to adapt
to different layout environments from learning one.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
228

6 CONCLUSION
In this study, layout design system that can design lay-
outs for various units and sites using DQN and AHP
is developed. Experimental results confirmed that the
system is able to create a layout that can consider the
relations among units better than the Q-learning based
system. In addition, the result of the success rate of
layout by changing the unit order shows that DQN im-
proves at all combination rates comparing with RL.
Consequently, the experiment shows that the facil-
ity layout is improved by the adaptability of DQN.
In the future, we will solve some challenges of sys-
tems. First, we will expand the scope of application of
the system to improve the performance like generat-
ing the layout at the multi-floor site. Second, we will
measure the parameter configuration of the CNN and
the structure of the AHP evaluator that are adopted
to the learning. Finally, we will make the developed
system able to create layouts under a layout condition
using the agent trained under another condition. We
would like to focus on these problems in future stud-
ies.
ACKNOWLEDGEMENTS
Kajima Corporation supported this work. We would
like to thank Hiromasa Akagi and Fumi Sekimoto,
who work with Kajima Corporation, for helpful dis-
cussions.
REFERENCES
Arulkumaran, K., Deisenroth, M. P., Brundage, M., and
Bharath, A. A. (2017). A brief survey of deep rein-
forcement learning. In IEEE Signal Processing Mag-
azine, pages 1–4.
Bai, L., Qu, P., and Wang, Y. (2009). Optimal model
of agile supply chain based on fuzzy ahp genetic
algorithm. In Scientific research, pages 278–280.
978-1-935068-01-3.
Burggraf, P., Wagner, J., and Heinbach, B. (2021). Biblio-
metric study on the use of machine learning as resolu-
tion technique for facility layout problems. pages 1–7.
10.1109/ACCESS.2021.3054563.
Chaillou, S. (2019). Ai and architecture an experimental
perspective. In The Routledge Companion to Artifi-
cial Intelligence in Architecture, pages 1–22. hISBN:
9780367824259.
Chen, G., Cai, Q., Fu, X., and Lai, Y. (2020). Research
on algorithms of computing offloading and resource
allocation based on dqn. In Journal of Physics: Con-
ference Series, pages 1–7. 10.1088/1742-6596/1748/
3/032047.
Di, X. and Yu, P. (2021). Multi-agent reinforcement learn-
ing of 3d furniture layout simulation in indoor graph-
ics scenes. pages 1–6. https://doi.org/10.48550/arXiv.
2102.09137.
Di, X., Yu, P., Company, I., and Research, I. (2021). Deep
reinforcement learning for producing furniture lay-
out in indoor scenes. pages 1–10. https://doi.org/10.
48550/arXiv.2101.07462.
Dixit, V. and Lawlor, J. (2019). Modified genetic algo-
rithm for automated facility layout design. In Inter-
national Journal of Advance Research, pages 1803–
1807. ISSN:2454-132X.
D.Meller, R. and A.Bozer, Y. (1997). Alternative ap-
proaches to solve the multi-floor facility layout prob-
lem. In Journal of Manufacturing Systems, pages
192–195. https://doi.org/10.1016/S0278-6125(97)
88887-5.
Espejo, P. G., Ventura, S., and Herrera, F. (2010). A survey
on the application of genetic programming to classifi-
cation. In IEEE Transactions on Systems, Man, and
Cybernetics, Part C (Applications and Reviews, pages
1212–134. 10.1109/TSMCC.2009.2033566.
fa, J. and JunLiu, L. (2019). Applying multi-objective ant
colony optimization algorithm for solving the unequal
area facility layout problems. In Applied Soft Com-
puting, pages 167, 168. https://doi.org/10.1016/j.asoc.
2018.10.012.
Goldwaser, A. and Thielscher, M. (2018). Deep rein-
forcement learning for general game playing. In The
Thirty-Fourth AAAI Conference on Artificial Intelli-
gence (AAAI-20), pages 1701–1708. https://doi.org/
10.1609/aaai.v34i02.5533.
Gonc¸alvesa, J. F. and G.C.Resende, M. (2015). A biased
random-key genetic algorithm for the unequal area fa-
cility layout problem. In European Journal of Op-
erational Research, pages 86–90. https://doi.org/10.
1016/j.ejor.2015.04.029.
Hu, R., Xu, J., Chen, B., Gong, M., Zhang, H., and Huang,
H. (2020). Tap-net: Transport-and-pack using rein-
forcement learning. pages 1–8. https://doi.org/10.
1145/3414685.3417796.
Ikeda, H., Nakagawa, H., and Tsuchiya, T. (2022). Towards
automatic facility layout design using reinforcement
learning. In Fedscis 2022, pages 1–10.
Izadinia, N., Eshghi, K., and Salmani, M. H. (2014). A ro-
bust model for multi-floor layout problem. In Com-
puters and Industrial Engineering, pages 127–134.
http://dx.doi.org/10.1016/j.cie.2014.09.023.
Kaelbling, L., Littman, M., and Moore, A. (1996). Rein-
forcement learning: A survey. In JAIR, pages 237–
241. https://doi.org/10.1613/jair.301.
Klar, M., Glatt, M., and Aurich, J. C. (2021). An imple-
mentation of a reinforcement learning based algorithm
for factory layout planning. In Manufacturing Letters,
pages 1–4. https://doi.org/10.1016/j.mfglet.2021.08.
Kusiak, A. and S.Heragu, S. (1987). The facility layout
problem. In European Journal of Operational Re-
search 29, pages 229–230. https://doi.org/10.1016/
0377-2217(87)90238-4.
Automatic Facility Layout Design System Using Deep Reinforcement Learning
229

LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learn-
ing. In Nature 521, pages 436–444.
Lee, S., Seon, J., Kyeong, C., Kim, S., Sun, Y., and Kim, J.
(2021). Novel energy trading system based on deep-
reinforcement learning in microgrids. In Energies,
pages 1–14. https://doi.org/10.3390/en14175515.
Lima, E., Gorski, E., Loures, E. F. R., Santos, E. A. P.,
and Deschamps, F. (2019). Applying machine learn-
ing to ahp multicriteria decision making method to as-
sets prioritization in the context of industrial mainte-
nance 4.0. In IFAC Papers On Line, pages 2152–2157.
https://doi.org/10.1016/j.ifacol.2019.11.524.
Liu, Y.-J., Cheng, S.-M., and Hsueh, Y.-L. (2017). enb se-
lection for machine type communications using rein-
forcement learning based markov decision process. In
eNB Selection for Machine Type Communications Us-
ing Reinforcement Learning Based Markov Decision
Process, pages 11330–11338.
L
´
opez, C. E., Cunningham, J., Ashour, O., and Tucker, C. S.
(2020). Deep reinforcement learning for procedural
content generation of 3d virtual environments. In J.
Comput. Inf. Sci. Eng., pages 1–9. https://doi.org/10.
1115/1.4046293.
Mirhoseini, A., Goldie, A., Yazgan, M., Jiang, J. W.,
Songhori, E., Wang, S., Lee, Y.-J., Johnson, E.,
Pathak, O., Nazi, A., Pak, J., Tong, A., Srinivasa, K.,
Hang, W., Tuncer, E., Le, Q. V., Laudon, J., Ho, R.,
Carpenter, R., and Dean, J. (2021). A graph place-
ment methodology for fast chip design. pages 207–
212. https://doi.org/10.1038/s41586-021-03544-w.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., Graves, A., Riedmiller,
M., Fidjeland, A. K., Ostrovski, G., Petersen, S.,
Beattie, C., Sadik, A., Antonoglou, I., King, H., Ku-
maran, D., Wierstra, D., Legg, S., and Hassabis, D.
(2015). Human-level control through deep reinforce-
ment learning. In Nature volume 518, pages 529–533.
R.Butz, A. (1969). Convergence with hilbert’s space fill-
ing curve. In Journal of Computer and System
Sciences, pages 128–131. https://doi.org/10.1016/
S0022-0000(69)80010-3.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L.,
van den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., Dieleman, S.,
Grewe, D., Nham, J., Kalchbrenner, N., Sutskever, I.,
Lillicrap, T., Leach, M., Kavukcuoglu, K., Graepel,
T., and Hassabis, D. (2016). Mastering the game of
go with deep neural networks and tree search. In Na-
ture volume 529, pages 484–489.
S.P.Singh and R.R.K.Sharma (2006). A review of differ-
ent approaches to the facility layout problems. In
The International Journal of Advanced Manufactur-
ing Technology, page 425. https://doi.org/10.1007/
s00170-005-0087-9.
Tam, K. Y. (1992). Genetic algorithms, function optimiza-
tion, and facility layout design. In European Jour-
nal of Operational Research, pages 322–330. https:
//doi.org/10.1016/0377-2217(92)90034-7.
Thengade, A. and Dondal, R. (2012). Genetic algorithm
– survey paper. In MPGI National Multi Conference
2012, pages 25–29. ISSN:0975-8887.
Vargas-Pardo, L. F. and Giraldo-Ramos, F. N. (2021). Fire-
fly algorithm for facility layout problemoptimization.
In Visi
´
on electr
´
onica, pages 33–38. https://doi.org/10.
14483/issn.2248-4728.
Verma, R., Saikia, S., Khadilkar, H., Agarwal, P., Shrof,
G., and Srinivasan, A. (2019). A reinforcement learn-
ing framework for container selection and ship load
sequencing in ports. In AAMAS, pages 2250–2252.
Wang, J. and Wang, L. (2020). Mobile edge comput-
ing task distribution and offloading algorithm based
on deep reinforcement learning in internet of vehi-
cles. In Journal of Ambient Intelligence and Human-
ized Computing, pages 1–7. https://doi.org/10.1007/
s12652-021-03458-5.
Wang, K., Ding, L., Dailami, F., and Matthews, J.
(2022). Ga-ahp method to support robotic polishing
process planning. In Digital Manufacturing Tech-
nology, pages 23–31. http://doi.org/10.37256/dmt.
2220221513.
WATKINS, C. J. and DAYAN, P. (1992). Q-learning. In
Machine Learning, pages 279–292. https://doi.org/10.
1007/BF00992698.
Yamashita, R., Nishio, M., Do, R. K. G., and Togashi,
K. (2018). Convolutional neural networks: an
overview and application in radiology. In Insights
Imaging 9, pages 611–620. https://doi.org/10.1007/
s13244-018-0639-9.
Yang, T., Zhang, S., and Li, C. (2021). A multi-objective
hyper-heuristic algorithm based on adaptive epsilon-
greedy selection. In Complex Intell. Syst., pages 765–
767. https://doi.org/10.1007/s40747-020-00230-8.
Yousefi, H., Ghodusinejad, M. H., and Noorollahi, Y.
(2021). Ga/ahp-based optimal design of a hybrid
cchp system considering economy, energy and emis-
sion. In Manufacturing Letters, pages 309–313. https:
//doi.org/10.1016/j.enbuild.2016.12.048.
Zeng, Y., Liu, W., Liu, Z., Zhang, J., and Niu, W.
(2010). Improved genetic algorithm and ana-
lytic hierarchy process for electric power equip-
ment maintenance schedule optimization. In Power
and Energy Engineering Conference, pages 491–495.
978-1-935068-17-4.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
230
