
TrichANet: An Attentive Network for Trichogramma Classification
Agniv Chatterjee
1 a
, Snehashis Majhi
1 b
Vincent Calcagno
2 c
and Franc¸ois Br
´
emond
1 d
1
INRIA Sophia Antipolis, 2004 Route des Lucioles, 06902, Valbonne, France
2
INRAE, Sophia Antipolis FR, Rte des Chappes, 06560, France
Keywords:
Trich Classification, Trich Detection, Multi-Scale Attention.
Abstract:
Trichogramma wasp classification has a significant application in agricultural research, thanks to their mas-
sive usage and production in cropping as a bio-control agent. However, classifying these tiny species is a
challenging task due to two factors: (i) Detection of these tiny wasps (barely visible with the naked eyes), (ii)
Less inter-species discriminative visual features. To combat this, we propose a robust method to detect and
classify the wasps from high-resolution images. The proposed method is enabled by a trich detection module
that can be plugged into any competitive object detector for improved wasp detection. Further, we propose a
multi-scale attention block to encode the inter-species discriminative representation by exploiting the coarse
and fine-level morphological structure of the wasps for enhanced wasps classification. The proposed method
along with its two key modules is validated in an in-house Trich dataset and a classification performance gain
of 4% compared to recently reported baseline approaches outlines the robustness of our method. The code is
available at https://github.com/ac5113/TrichANet.
1 INTRODUCTION
Trichogramma (Trich) are one of the smallest para-
sitic species in the world (<0.5mm), widely used as a
biocontrol agent (BCA) to protect crops from pest at-
tacks. They lay and develop their own eggs inside the
eggs of harmful insects to trigger the death of harmful
ones. For this, Trichogramma are produced and used
on an industrial scale as an alternative to chemicals in
different cropping systems (i.e., maize fields, tomato-
producing greenhouses, etc.). Thus for optimal pest
control, it is essential to analyse their behaviour and
movement to ensure proper distribution in crop-fields.
But this is difficult for a casual observer in real-world
setting due to their minute size. With the recent de-
velopment of tiny object analysis (Gong et al., 2021),
(Lee et al., 2022), (Yang et al., 2022) and Multi-
Object Tracking (MOT) (Aharon et al., 2022), (Zhang
et al., 2021) in the computer vision domain, a new re-
search direction has opened up to analyse and classify
the Trichogramma in agricultural research.
To classify the Trich, the essential step lies in de-
tecting these individuals from the observation arena.
The detection remains challenging due to (i) Tiny size
a
https://orcid.org/0000-0001-7199-1196
b
https://orcid.org/0000-0002-9101-017X
c
https://orcid.org/0000-0002-5781-967X
d
https://orcid.org/0000-0003-2988-2142
Figure 1: Sample Trichogramma captured in a observation
arena over egg patches. The insects are in black, while the
greenish-yellow patches are the pest eggs.
of the Trich, (ii) Egg patches in the arena as shown in
Figure 1. From initial experimentation, it is found that
recent popular object detection methods (Ge et al.,
2021; Pani et al., 2021) result in many false positives
with fewer true positive detection in these challenging
scenarios. This failure case is due to the unavailabil-
ity of a fully annotated dataset, and consequently, the
object detectors could not be fine-tuned for the Trich
detection task. To combat this, we propose a simple
and effective Trich Detection module that is empow-
ered by segmentation of the species from the arena
by removing the egg patches and the noise from the
background followed by pre-trained object detectors
to detect the Trich.
Upon successful detection of the Trich, the clas-
sification of species remains challenging due to the
subtle differences in the spatial cue among the cate-
gories. With the recent success of the Vision Trans-
formers (ViTs (Dosovitskiy et al., 2020)) over the
864
Chatterjee, A., Majhi, S., Calcagno, V. and Brémond, F.
TrichANet: An Attentive Network for Trichogramma Classification.
DOI: 10.5220/0011677700003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
864-872
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

ConvNets (He et al., 2016), (Howard et al., 2017),
(Krizhevsky et al., 2017), (Simonyan and Zisserman,
2014), (Szegedy et al., 2016), (Tan and Le, 2019),
we empirically found that the patch-based relation
encoder ViT is capable of providing superior repre-
sentation than that of ConvNets for various species.
However, the performance still remains limited due
to the existence of a domain gap between the ViT
pre-training (i.e., ImageNet (Deng et al., 2009)) and
the target task (Trich classification). Again, due to
the limited number of samples in the target dataset,
it is non-feasible to fine-tune a high capacity model
like ViT. Further, we analyze that there exists a sub-
tle change in spatial cues among the species, which
makes the classification more challenging. For this,
we propose a Multi-scale Attention (MSA) block
to encode the discriminative features between the
species by analyzing their features at multiple scales.
The discriminability is MSA is encoded by empha-
sizing on the salient spatial regions on a global scale
and suppressing the redundant regions. The proposed
MSA block adopts a head-only learning paradigm
which is stacked with the ViT feature encoder to train
on the target task. We refer our designed network as
TrichANet, which enables Trichogramma classifica-
tion in an attentive manner. To validate the robustness
of TrichANet, we conduct experiments on an in-house
Trich dataset and found that it surpasses the baseline
methods by a significant margin.
In summary, the key contribution of the work is in
three-folds:
1. First, a simple and effective Trich Detection
method is proposed to detect the Trich individu-
als with lower false positives.
2. Second, a generalized TrichANet is proposed in
this work for effectively classifying Trich individ-
uals in high-resolution images.
3. To showcase the robustness of each building block
in TrichANet, an extensive experimental study is
carried out with significant qualitative and quanti-
tative analysis.
2 RELATED WORK
Our work would fall within the domain of tiny object
detection and classification. The number of available
work in these domains is limited, in spite of the huge
scopes.
Tiny Object Detection. An interactive object de-
tection module has been reported in the work of Lee et
al. (Lee et al., 2022), in which user input annotations
of some objects are processed and both Late Fusion
and Classwise Collated Correlation for the local and
glocal context scales for the detection of tiny of var-
ious classes and different instances. These are then
concatenated channelwise, to obtain the final output
detections. In the work of Yang et al. (Yang et al.,
2022), possible locations of objects are initially pre-
dicted from low resolution feature maps, and a sparse
feature map from these values are obtained at these
regions from the high resolution features. Then, a de-
tector outputs the detections from these feature maps.
The entire pipeline is connected in a cascaded man-
ner, to allow for faster and accurate detections. Using
a FPN backbone, a customised region proposal net-
work has been proposed in (Qin et al., 2020), to gen-
erate rotated proposals at various scales, which are
then aligned with the original images. Features are
then sampled from it and fed to a network to reduce
misalignments and output the final localizations us-
ing three detector heads with different structures. In
the pipeline reported in (Yi et al., 2021), an U-shaped
network with long skip connections are used to ob-
tain four outputs - heat map, offset map, box param-
eter map and orientation map, from which the center
of the bounding boxes are inferred, and the boundary
aware vectors are learned, from which the bounding
box corners are inferred. Han et al. (Han et al., 2021)
propose a rotation equivariant architecture to extract
rotation equivariant features. They then extract the
rotation invariant features by RRoI warping. Thus,
their proposed method can extract rotation invariant
features in both spatial and orientation dimensions.
Tiny Object Classification. A multi-staged module
is proposed by Kong et al. (Kong and Henao, 2022),
in which the first stage generates an attention map
from the downscaled input image, from which regions
are sampled with replacement. Then, in the second
stage, another attention network generates attention
maps for each region and samples sub-regions from
the regions sampled previously. These sub-regions
are finally fed to a feature extractor, and the feature
maps are aggregated using the corresponding atten-
tion weights, and predictions are obtained using a
classification module. The attention networks are also
used to sample contrastive examples, during training.
A light-weight model for tiny object recognition is
proposed in (Dat et al., 2018). It has five convo-
lutional layers, with filters of receptive fields 3 × 3,
with ReLU between layers for non-linearity. Batch
normalization is also used to speed up training, and
dropout is used for regularization.
Multi-Object Tracking. The authors of (Cao et al.,
2022) have proposed using the momentum of the ob-
TrichANet: An Attentive Network for Trichogramma Classification
865
ROI Extraction
Object Detector on ROI
Bounding Box Mapping
Feature Encoder
MLP
ℒ
Focal
Trich Detection
Multi-Scale
Attention
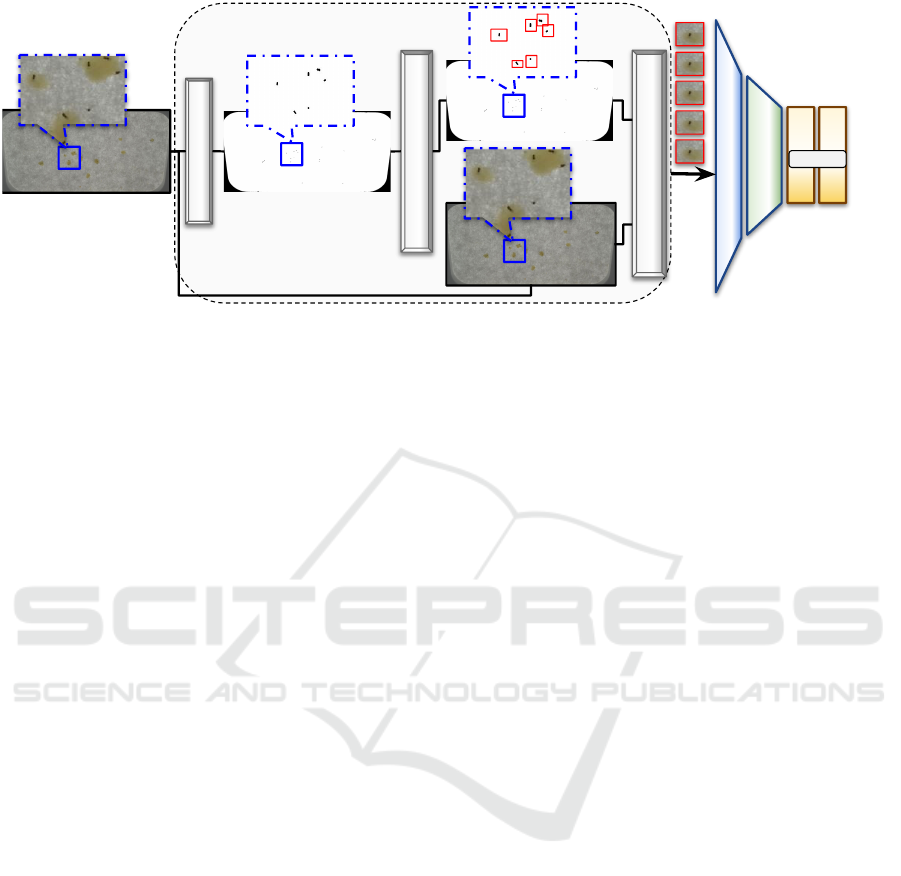
Figure 2: Proposed Method: First, pre-processing is done on the input HR images, after which it is broken into patches and
passed through a pre-trained YOLOX detector. The detections obtained are then passed through a pre-trained ViT encoder,
followed by the proposed MSGA module, and finally a classification head, to obtain the class probability matrix.
ject in the association stage, developing a pipeline
with less noise and more robustness in occlusion and
erratic motion. They also add a separate observation
term in the association cost, and also include a re-
covery module to search for lost objects around the
time of their last detection. Motion and appearance
information have been combined, along with camera-
motion compensation and a new Kalman filter state
vector for better box localization, in the tracker re-
ported in (Aharon et al., 2022). They also present a
new method to fuse IoU and ReID’s cosine-distance
for better association between detections and track-
lets. Instead of simply discarding the detection boxes
with score below the pre-determined threshold, the
authors in (Zhang et al., 2021) propose tracking these
detection boxes by association. The similarities with
tracklets are analysed for low score detection boxes,
to recover true objects are remove background detec-
tions. In order to improve from DeepSORT (Wojke
et al., 2017), the authors of (Du et al., 2022) by using
a new appearance feature extractor and a newer back-
bone architecture, to extract much more discriminat-
ing features. Also, the feature bank is replaced with a
feature extraction strategy. Camera motion compen-
sation is also added in the motion branch, and the
vanilla Kalman algorithm is replaced with the NSA
Kalman algorithm. Finally, thr assignment problem is
solved with both appearance and motion information.
3 TrichANet
The overview of the TrichANet is shown in Figure 2.
It can be seen that TrichANet has four modules i.e.
(i) Trich Detection, (ii) Feature Encoder, (iii) Multi-
Scale Attention and (iv) MLP Head, that are sequen-
tially executed to achieve Trichogramma classifica-
tion. A detailed description of each module is pre-
sented in the following subsections.
3.1 Trich Detection
The primary goal of this module is to detect the tiny
trich individuals present in the observatory arena. The
proposed trich detection module comprising of three
steps (i.e., ROI Extraction, Object Detector, BBOX
Mapping) is presented in Figure 2.
ROI Extraction. It enables the effective segmen-
tation of Trich wasps from the observatory arena by
eliminating the egg patches and background noise, as
shown in the Figure 3. For this, first a dynamic thresh-
olding operation is performed on the input images us-
ing the Otsu Algorithm with a fixed offset. It can
be visualized from Figure 3 that the output of otsu
thresholding results in a few noises along with the
wasps. From analysis, we found that the noises are
structurally smaller than the wasps. Thus, to elim-
inate them completely while preserving the original
wasps’ structure, a spatial contact-expand operation
is applied to the binary images. The spatial contact-
expand operator is essentially three consecutive mor-
phological erosion operations to eliminate the noise
in the image plane followed by three consecutive di-
lation operations to regain the original size of trich
wasps. For both erosion and dilation a 5 × 5 structur-
ing element is used.
Object Detector on ROI. A pre-trained object de-
tector YOLOX is considered here to detect the trich
on the ROI extracted binary images. Further, to ease
in the detection, the high-resolution 8256 × 5504 bi-
nary images are split into 224× 224 patches. For each
patch, YOLOX is applied parallelly to obtain the de-
tection bounding boxes in the binary images. The
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
866
resultant of this step is the set of n (Where n = no.
of wasps present in the observatory arena) bounding
boxes that precisely detect the tiny wasps in the ROI
extracted binary image.
RGB Trich Extraction. Since there exists no struc-
tural distinction between the trich wasps categories,
it is non-trivial to classify the binary detected wasps.
For this, we aim at extracting the RGB trich patches
by mapping the bounding box coordinates obtained
from ROI images to that of original RGB images.
So, for a given image I containing n trich wasps,
this step outputs a trich image map I
T
∈ R
n×h×w
,
where h = h
1
, h
2
, . . . , h
n
and w = w
1
, w
2
, . . . , w
n
. Since
the shape of the bounding boxes are non-identical, a
NULL-padding operation is performed across h and
w to maintain the homogeneity in the bounding box
shape while preserving the original trich resolution.
Next, the resultant I
T
is considered in the following
steps to classify the individual trich into pre-defined
set of categories.
Dynamic
Thresholding
Spatial
Contract-Expand
Noise
Wasp
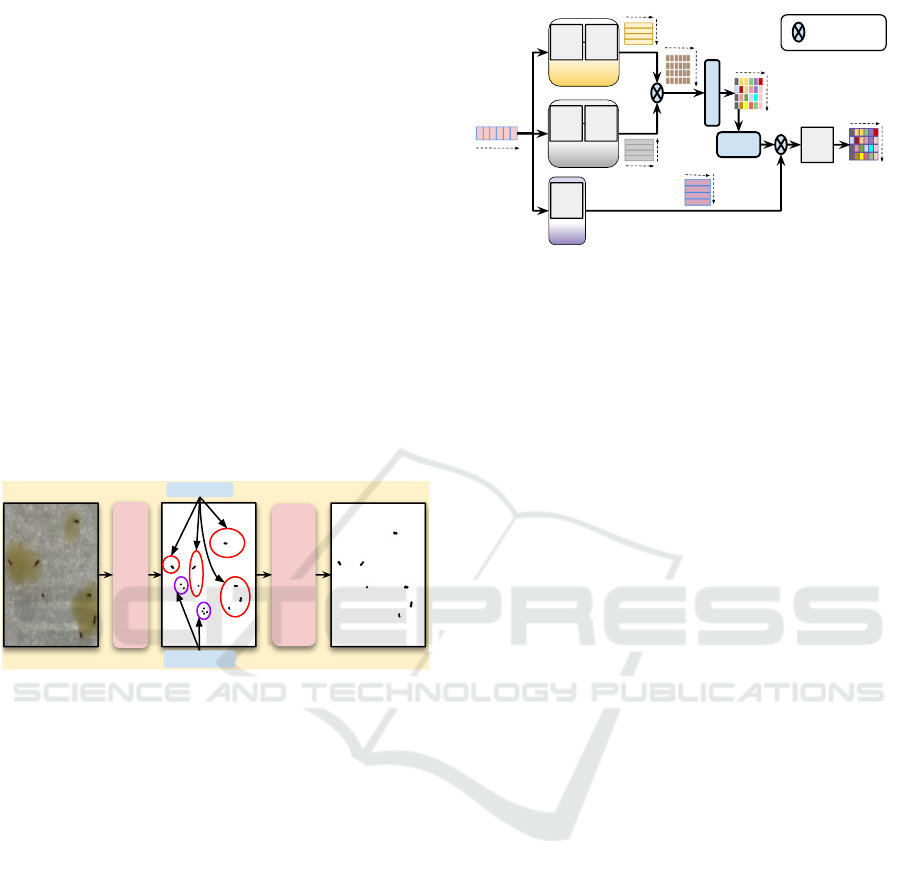
Figure 3: ROI Extraction: First, dynamic thresholding is
performed to dissociate the foreground (i.e., wasps) from
the background (i.e., the arena and eggs) from the origi-
nal image. Next, a spatial contract-expand operation is per-
formed in binary image to remove the additional noises.
3.2 Feature Encoder
In order to categorize the trich wasps, at first, feature
extraction is carried out for each trich wasp image in
I
T
from a feature encoder. With the recent popularity
of the Vision Transformers (ViTs) over the ConvNets
and due to its patch-based relation encoding, giv-
ing rise to superior representation than ConvNets, we
adopt a pre-trained ViT as the feature encoder. Since
there exists a scarcity of sufficient samples in trich
classification task, we found that it is non-trivial to
train or fine-tune ViT. For this, the pre-trained weights
from the ImageNet dataset for ViT are considered for
extracting D dimensional feature representation for
each trich wasp. So for a given I
T
∈ R
n×h×w
, the fea-
ture encoder outputs a feature map F ∈ R
n×D
.
K
Conv
1d
k=3
Conv
1d
k=3
RF= 5
Conv
1d
k=3
Conv
1d
k=3
RF= 5
Conv
1d
k=3
RF= 3
Conv
1d
k=1
D
n
D
n
Q
Softmax
Layer-
Norm
n
D
n
V
D
D
n
n
Hadamard
Product
D
D
Figure 4: Proposed Multi-Scale Attention Module: It
generates a multi-scale attentive feature map by projecting
the input feature map to different convolutional receptive
fields (i.e. RF=3,5). Here RF=5 projection encodes the
coarse-level contextual feature, whereas RF=3 projection
provides the fine-grained cue. Hence an attentive feature
map generated from such a coarse-fine encoding ensures to
capture discriminability in spatial cues across species cate-
gories.
3.3 Multi-Scale Attention Module
In order to obtain discriminative representation
among the wasp categories, it’s necessary to capture
the changes in coarse and fine-grained spatial fea-
tures. Coarse level feature variations can be encoded
by 1D convolution operation with a higher receptive
field (RF) (i.e. RF = 5). In contrast, variations in
fine-grained features can be encoded by 1D convolu-
tion operation with a lower receptive field (i.e. RF
= 3). So, to effectively encode the change in coarse
and fine-grained spatial cues for discriminative repre-
sentation, a multi-scale attention module (MSAM) is
proposed.
As shown in Figure 4, MSAM inputs the fea-
ture map F
i
∈ R
1×D
of i
th
trich (where i = 1, 2, . . . , n)
extracted from the feature encoder. Next, MSAM
projects the F
i
to three latent space (i.e key (K), query
(Q), and value (V )) with multiple feature scales. The
multiple feature scales are achieved by varying the
RF (i.e RF=3,5) of the latent projection to encode the
coarse and fine-grained spatial cues. In MSAM, K
and Q latent projections have similar RF=5, which is
obtained from two sequential Conv1D layers. But, V
has RF=3 that is obtained from a single Conv1D layer.
The kernel size (k) in all the convolution layers of K,
Q, and V is set to 3 and the number of convolution fil-
ters applied is N. Now hadamard product is applied
between the D × N dimensional output feature map
obtained from K and Q followed by a softmax activa-
tion to generate the attention mask (A). Further, the
attention mask (A) is normalized and multiplied with
V by a hadamard product. The resultant is then ap-
plied to a single Conv1D layer with k=1 to obtain the
TrichANet: An Attentive Network for Trichogramma Classification
867

D × N dimensional attentive feature map (F
A
). Sub-
sequently, F
A
is flattened and passed to the MLP
head for classification.
3.4 MLP Head
The MLP head consists of two MLP layers in decreas-
ing number of hidden units. The last layer is activated
with softmax to obtain the class probabilities.
3.5 Network Optimization
The proposed TrichANet is end-to-end trainable ex-
cluding the trich detection and feature encoder blocks.
In order to optimize TrichANet, the Focal Loss func-
tion is used as formulated below,
L
f ocal
= −α
t
(1 − p
t
)
γ
log(p
t
) (1)
where, p
t
is a measure of prediction accuracy, and
thus, the loss is decreased for examples that are pre-
dicted better. This is to ensure that the model doesn’t
over-focus on the ‘easier’ examples, and thus, pro-
duce a skewed confusion matrix, the Focal Loss was
used as the objective function to ensure greater weigh-
tage for ‘harder’ samples.
4 EXPERIMENTS
4.1 Dataset
The experiments are conducted on a in-house Trich
dataset that comprises of 518 number of high-
resolution raw images belonging to two trich cate-
gories (i.e. ‘TB’, ‘TE’). Out of 518 raw images, 454
and 64 raw images are from ‘TB’ and ‘TE’ categories
respectively. The images collected in Trich dataset
follow a definite image acquisition step as discussed
below.
Image Acquisition. The image acquisition is done
with a NIKON © Z7 camera which captures the im-
ages with high-resolution (i.e. 8256 × 5504) but at a
low frequency ( i.e. a shot is taken in every 10 sec-
onds for 5 minutes). The settings were: ISO 250;
diaphragm aperture F/22; shutter speed 1/160. In or-
der to ensure sufficient lighting, the observation are-
nas were placed on a LED plate and surrounded by a
lightbox. A ventilation system was installed to avoid
overheating, resulting in a temperature of 28 ± 0.8 °C.
Train-Test Protocol. For a trivial train-test proto-
col, first, the Trich Detection method is applied in the
raw images. From this, a total of 10659 trich species
were obtained out of which 9558 and 1101 belong
to the ‘TB’ and ‘TE’ classes respectively. Then, we
follow 94-6% split for train-test. Thus, the training
dataset consists of 10000 images, of which 8976 im-
ages belong to the ‘TB’ class and 1024 images belong
to the ‘TE’ class. The testing set consists of 659 im-
ages, of which 582 images belong to the ‘TB’ class
and 77 images belong to the ‘TE’ class. This split was
done randomly. After the nine-fold augmentation of
the ‘TE’ class, the training set consists of 18192 sam-
ples, of which the number of samples belonging to the
‘TB’ class remains the same as before, but the number
of samples belonging to the ‘TE’ class is now 9216.
The testing set also remains the same as before, in or-
der to maintain the fairness of comparison.
4.2 Evaluation Metric
For robust evaluation in trich classification, we use
Accuracy, Precision, and Recall as the evaluation met-
ric which is from the confusion matrix. The evalua-
tion metrics can be formulated as :
Accuracy =
1
m
m
∑
r=1
T P
r
+ T N
r
T P
r
+ T N
r
+ FP
r
+ FN
r
Precision =
1
m
m
∑
r=1
T P
r
T P
r
+ FP
r
Recall =
1
m
m
∑
r=1
T P
r
T P
r
+ FN
r
where, m, T P, T N, FP and FN represent the batch
size, True-Positives, True-Negatives, False-Positives
and False negatives respectively.
4.3 Implementation Details
The model is implemented in the PyTorch framework
using a Nvidia GTX 2080 Ti GPU with 32 GB mem-
ory. The Adam Optimization Algorithm is used for
minimizing the loss function. An adaptive learning
scheme is employed to efficiently decay the learning
rate whenever necessary during training. Initially, the
learning rate is set to 0.0002 which is decayed by a
factor of 2 as the loss curve starts oscillating around
a local minima for 3 consecutive epochs. The net-
work is trained for a total of 20 epochs for a batch
size of 8, using Adam Optimization with β
1
= 0.9
and β
2
= 0.999, since the number of trainable param-
eters and images are both less in number, and thus,
the model would fit within that many epochs.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
868

5 RESULTS AND DISCUSSION
Results on Wasp Detection. Since there are no
ground truths available for the detection sub-task, a
purely quantitative analysis has been performed to
evaluate the performance of the proposed detection
pipeline, to obtain the bounding boxes, from the RGB
images. The existing architecture, TrichTrack (Pani
Table 1: Comparison Table of detection results. The metric
used is average number of detections per image.
Model
Avg. # of BBox
(Actual = 20)
TrichTrack (Pani et al., 2021) 2
Ours 21
et al., 2021), consists of a YOLOv5 detector, which
has been trained iteratively over two stages on a
dataset similar to ours. As can be observed from Ta-
ble 1, our proposed detection algorithm vastly over-
performs from TrichTrack. Considering that the num-
ber of wasps present per image is 20, our proposed
architecture detects an average of 21 individuals per
image, whereas the existing model detects only 2 in-
dividuals per image.
Results of Wasp Classification. For the task of
classifying the wasp species, the proposed method-
ology was compared with other popular attentive
enhancements, namely the Squeeze-and-Excite (SE)
module (Hu et al., 2018), the Non-Local (NL) block
(Wang et al., 2018) and Multi-scale adaptation of the
conventional Non-Local block. It is visible from Ta-
ble 2 that the proposed method outperforms the other
attentive enhancements in the classification task.
Table 2: Comparison Table of classification performance
using different attention blocks. Here, ’mAcc’, ’Prec’ and
’Rec’ refer to mean Accuracy, Precision and Recall metrics.
The attention modules tested are: Squeeze-and-Excite (SE)
module (Hu et al., 2018), Non-Local (NL) module (Wang
et al., 2018), Multi-scale adaptation of conventional Non-
Local block (NL*) and the proposed Multi-scale Attention
(MSA) module
Model
TB TE
mAcc Prec Rec Prec Rec
ViT-SE (Hu et al., 2018) 0.91 0.94 0.96 0.65 0.51
ViT-NL (Wang et al., 2018) 0.90 0.97 0.91 0.54 0.78
ViT-NL* 0.90 0.96 0.92 0.55 0.73
ViT-MSA 0.93 0.95 0.97 0.71 0.64
The SE block is often used as an attentive en-
hancement for channels and has been utilized on the
one-dimensional feature map obtained from the en-
coder, to augment or suppress the respective features.
The NL block is often a popular choice as an attentive
enhancement, since it is capable of capturing long-
range dependencies from feature maps, as opposed
to purely convolution-based attentive enhancements,
which are only able to capture local short-range de-
pendencies. Thus, it was also tested as the attentive
enhancement in our pipeline. Since the NL block was
insufficient as-is to suitably enhance the classification
performance, we tried to increase the receptive fields
of the three branches- query and key to 5 and value
to 3, and also adding a layer-norm module. Finally,
we change the structure of the Multi-scale NL block
by changing the matrix-multiplication to a Hadamard
product, resulting in the MSA block, which resulted
in improved classification performance. The results
have also been visualized, with the use of confusion
matrices, in Figure 5.
ViT-SE
ViT-NL
ViT-NL* ViT-MSA
Figure 5: Comparative Analysis of the confusion metrics
obtained from experiments with various popular attentive
enhancements and the proposed attention module, results of
which have been tabulated in Table 2. The values are on the
testing dataset, which consists of 582 samples belonging to
the ‘TB’ class and 77 samples belonging to the ‘TE’ class.
6 ABLATION STUDIES
6.1 Wasp Individual Detection
An ablation study is performed on the pre-processing
techniques in data preparation - thresholding and C-
E. The results have been tabulated in Table 4. The
metric used was the average number of detections per
image, since a specific number of insects (here, 20)
are present in each image, irrespective of the species.
Importance of Dynamic Thresholding: Initially,
dynamic thresholding is performed on the input RGB
images using a threshold value obtained from the Otsu
Algorithm, offset by a fixed empirical value of -10.
This not only makes the insects more visible, but also
TrichANet: An Attentive Network for Trichogramma Classification
869
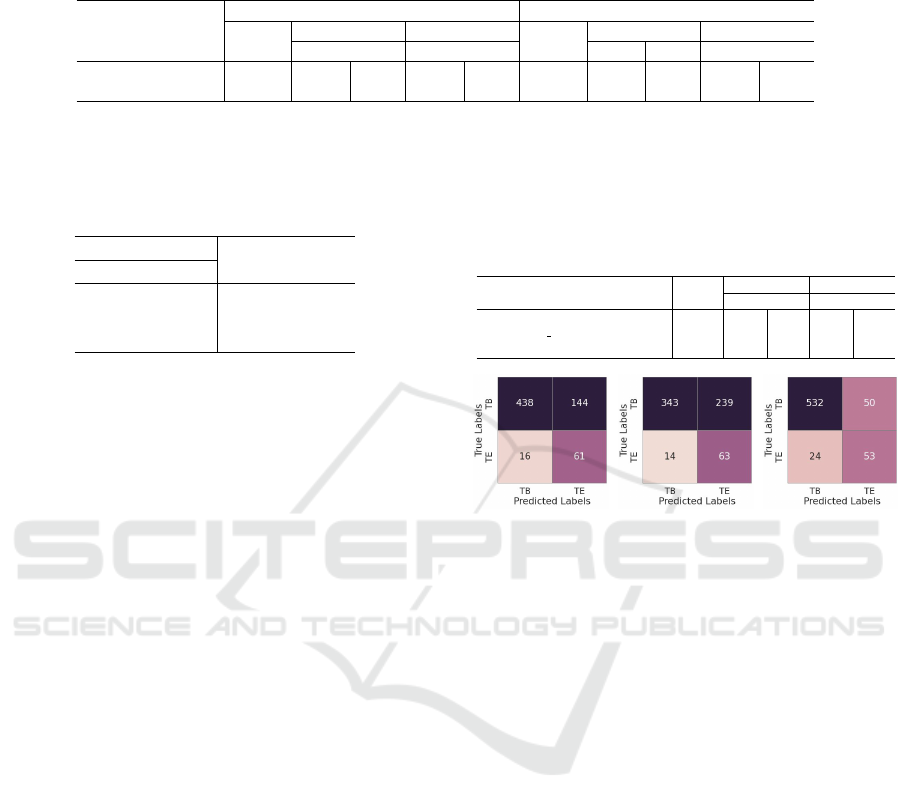
Table 3: Comparison Table of classification performance, with two objective functions. Here, ’mAcc’, ’Prec’ and ’Rec’ refer
to mean Accuracy, Precision and Recall metrics. The models tested are: pre-trained ViT encoder with two linear layers as
classification head; and a pre-trained ViT encoder with the Multiscale Attention, and two linear layers as classification head.
Focal Loss Cross-Entropy Loss
Model
TB TE TB TE
mAcc Prec Rec Prec Rec mAcc Prec Rec Prec Rec
ViT+MLP 0.89 0.96 0.91 0.51 0.69 0.88 0.97 0.90 0.52 0.81
ViT-MSA+MLP 0.93 0.95 0.97 0.71 0.64 0.90 0.94 0.95 0.58 0.57
Table 4: Ablation Study on Pre-processing techniques.
Here, ’Thresh’ refers to the dynamic thresholding opera-
tion, and ’S-C-E’ refers to the Spatial Contract-Expand op-
eration. The average number of bounding boxes detected
across all images is used as the metric.
Pre-processing Avg. # of BBox
Thresh S-C-E (Actual = 20)
✗ ✗ 60
✓ ✗ 57
✓ ✓ 21
suppresses the eggs and other noises present in the
images. Its efficacy can be observed from Table 4,
where it reduces the number of detections per image
from 60 to 57.
Importance of Spatial Contract-Expand: After
dynamic thresholding, the spatial contract-expand al-
gorithm is applied to the images, before being bro-
ken into patches. The ’Contraction’ half almost com-
pletely eliminates all noise from the images-eggs or
background-which just thresholding alone failed to
remove. Then, the ’Expansion’ half brings the insects
back to their original sizes, since they have been re-
duced by ’Contraction’. Its efficacy is obvious from
Table 4, since it reduces the average number of detec-
tions drastically - from 57 to 21, bringing it very close
to the true value of 20 insects per image.
6.2 Wasp Species Classification
Experiments with the Encoder Architecture. As
can be observed from Table 5 that the transformer en-
coder outperforms the convolution-based encoders by
a large margin, in the metrics used for comparative
purposes. Even from the obtained confusion matrix
for each model, as shown in Figure 6, it can be in-
ferred that the used encoder architecture succeeds in
classifying both species more accurately than the two
baseline encoders compared with.
Experiments on the Classification Pipeline. The
proposed classification pipeline incorporates a pre-
trained and frozen ViT encoder as it is not feasible
to train the encoder with a limited size of dataset.
Thus, external attentive enhancements is performed
by MSA module to enhance the extracted feature
map. MSA helps to encode the coarse-fine features
Table 5: Comparison Table of classification performance,
with various encoder architectures, with the same classifica-
tion head and objective function. Here, ’mAcc’, ’Prec’ and
’Rec’ refer to mean Accuracy, Precision and Recall metrics.
The encoders compared with are a ResNet18 and an Effi-
cientNet b7. ViT is pre-trained Vision Transformer, with a
trainable classification head.
Model
TB TE
mAcc Prec Rec Prec Rec
ResNet18 (He et al., 2016) 0.76 0.96 0.75 0.30 0.79
EfficientNet b7 (Tan and Le, 2019) 0.62 0.96 0.59 0.21 0.82
ViT (Dosovitskiy et al., 2020) 0.89 0.96 0.91 0.51 0.69
ResNet18
EfficientNet b7 ViT
Figure 6: Comparative Analysis of the confusion metrics
obtained from the encoders experimented with, as tabulated
in Table 5. The values are on the testing dataset, which
consists of 582 samples belonging to the ‘TB’ class and 77
samples belonging to the ‘TE’ class.
to better differentiate between the two classes. Its ef-
ficacy can be observed from Table 3 and Figure 7,
irrespective of the objective function used.
Importance of Focal Loss. The classification accu-
racy was further boosted, by the use of Focal Loss as
the objective function. Focal Loss gives more weight
to samples that have low classification accuracy, and
thus, focuses more on the ’hard’ samples, as opposed
to the vanilla Cross-Entropy Loss, which treats each
sample equally. As can be observed from Table 3, it
provides a boost in performance to the baseline model
and a bigger boost in accuracy to the complete model.
7 CONCLUSION
In this work, we propose a combined detection-
classification pipeline to handle the detection of very
tiny wasps from high-resolution images and classify
them into species based on very subtle spatial cues.
Our pipeline consists of a light yet effective data
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
870

ViT-FL
ViT-MSA-FL
ViT-CE ViT-MSA-CE
Figure 7: Comparative Analysis of the confusion metrics
obtained with the baseline model and with the addition of
the proposed attention module. The experimental values
from the two objective functions experimented with have
also been visually demonstrated, and have been tabulated
in Table 3. The values are on the testing dataset, which
consists of 582 samples belonging to the ‘TB’ class and 77
samples belonging to the ‘TE’ class.
preparation module to extract the ROIs (i.e., the wasp
inidividuals) from the high-resolution images. We
have also obtained SOTA results in the classification
subtask, as compared to other existing methods. This
can be attributed to our classification pipeline, espe-
cially the MSA block, which can extract subtle visual
cues to distinguish between wasp individuals. As evi-
dent from the results reported, this is a robust pipeline
that can be used in other similar wasp detection and
classification problems, or tiny object detection and
classification problems in general.
ACKNOWLEDGEMENTS
This work has been supported by the French government,
through the 3IA C
ˆ
ote d’Azur Investments in the Future
project managed by the National Research Agency (ANR)
with the reference number ANR-19-P3IA-0002. The au-
thors are also grateful to the OPAL infrastructure from Uni-
versit
´
e C
ˆ
ote d’Azur for providing resources and support.
REFERENCES
Aharon, N., Orfaig, R., and Bobrovsky, B.-Z. (2022). Bot-
sort: Robust associations multi-pedestrian tracking.
arXiv preprint arXiv:2206.14651.
Cao, J., Weng, X., Khirodkar, R., Pang, J., and Kitani,
K. (2022). Observation-centric sort: Rethinking
sort for robust multi-object tracking. arXiv preprint
arXiv:2203.14360.
Dat, T., Nguyen, V.-T., and Tran, M.-T. (2018). Lightweight
deep convolutional network for tiny object recogni-
tion. pages 675–682.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., et al. (2020). An image is
worth 16x16 words: Transformers for image recogni-
tion at scale. arXiv preprint arXiv:2010.11929.
Du, Y., Song, Y., Yang, B., and Zhao, Y. (2022). Strong-
sort: Make deepsort great again. arXiv preprint
arXiv:2202.13514.
Ge, Z., Liu, S., Wang, F., Li, Z., and Sun, J. (2021).
Yolox: Exceeding yolo series in 2021. arXiv preprint
arXiv:2107.08430.
Gong, Y., Yu, X., Ding, Y., Peng, X., Zhao, J., and Han,
Z. (2021). Effective fusion factor in fpn for tiny ob-
ject detection. In Proceedings of the IEEE/CVF winter
conference on applications of computer vision, pages
1160–1168.
Han, J., Ding, J., Xue, N., and Xia, G.-S. (2021). Redet:
A rotation-equivariant detector for aerial object detec-
tion. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
2786–2795.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Andreetto, M., and Adam,
H. (2017). Mobilenets: Efficient convolutional neu-
ral networks for mobile vision applications. arXiv
preprint arXiv:1704.04861.
Hu, J., Shen, L., and Sun, G. (2018). Squeeze-and-
excitation networks. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 7132–7141.
Kong, F. and Henao, R. (2022). Efficient classification of
very large images with tiny objects. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 2384–2394.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2017). Im-
agenet classification with deep convolutional neural
networks. Commun. ACM, 60(6):84–90.
Lee, C., Park, S., Song, H., Ryu, J., Kim, S., Kim, H.,
Pereira, S., and Yoo, D. (2022). Interactive multi-
class tiny-object detection. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 14136–14145.
Pani, V., Bernet, M., Calcagno, V., van Oudenhove, L.,
and Bremond, F. F. (2021). TrichTrack: Multi-Object
Tracking of Small-Scale Trichogramma Wasps. In
AVSS 2021 - 17th IEEE International Conference on
Advanced Video and Signal-based Surveillance, Vir-
tual, United States.
TrichANet: An Attentive Network for Trichogramma Classification
871

Qin, R., Liu, Q., Gao, G., Huang, D., and Wang, Y.
(2020). Mrdet: A multi-head network for accurate ori-
ented object detection in aerial images. arXiv preprint
arXiv:2012.13135.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture
for computer vision. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition.
Tan, M. and Le, Q. (2019). Efficientnet: Rethinking model
scaling for convolutional neural networks. In Interna-
tional Conference on Machine Learning, pages 6105–
6114. PMLR.
Wang, X., Girshick, R., Gupta, A., and He, K. (2018). Non-
local neural networks. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric. In 2017 IEEE international conference on image
processing (ICIP), pages 3645–3649. IEEE.
Yang, C., Huang, Z., and Wang, N. (2022). Query-
det: Cascaded sparse query for accelerating high-
resolution small object detection. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 13668–13677.
Yi, J., Wu, P., Liu, B., Huang, Q., Qu, H., and Metaxas,
D. (2021). Oriented object detection in aerial images
with box boundary-aware vectors. In Proceedings of
the IEEE/CVF Winter Conference on Applications of
Computer Vision, pages 2150–2159.
Zhang, Y., Sun, P., Jiang, Y., Yu, D., Yuan, Z., Luo, P., Liu,
W., and Wang, X. (2021). Bytetrack: Multi-object
tracking by associating every detection box. arXiv
preprint arXiv:2110.06864.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
872
