
Extended Head Pose Estimation on Synthesized Avatars for Determining
the Severity of Cervical Dystonia
Roland Stenger
1 a
, Sebastian L
¨
ons
2
, Feline Hamami
2
, Nele Br
¨
ugge
3
, Tobias B
¨
aumer
2
and Sebastian Fudickar
1 b
1
MOVE Junior Research Group, Institute of Medical Informatics, University of L
¨
ubeck, 23562 L
¨
ubeck, Germany
2
Institute for Systems Motor Science, University of L
¨
ubeck, 23562 L
¨
ubeck, Germany
3
German Research Center for Artificial Intelligence, 23562 L
¨
ubeck, Germany
fi fi
Keywords:
Domain Randomization, Deep Learning, Dystonia, Head Pose Estimation, Synthesized Avatars.
Abstract:
We present an extended head pose estimation algorithm, which is trained exclusively on synthesized human
avatars. Having five degrees of freedom to describe such head poses, this task can be regarded as being more
complex than predicting the absolute rotation only with three degrees of freedom, which is commonly known
as head pose estimation. Due to the lack of labeled data sets containing such complex head poses, we created
a data set, consisting of renderings of avatars. With this extension, we take a step towards an algorithm that
can make a qualitative assessment of cervical dystonia. Its symptomatic consists of an involuntary twisted
head posture, which can be described by those five degrees of freedom. We trained an EfficientNetB2 and
evaluated the results with the mean absolute error (MAE). Such estimation is possible, but the performance
works differently well for the five degrees of freedom, with an MAE between 1.71° and 6.55°. By visually
randomizing the domain of the avatars, the gap between real subject photos and the simulated ones might
tend to be smaller and enables our algorithm being used on real photos in the future, while being trained on
renderings only.
1 INTRODUCTION
Dystonia is a movement disorder, characterized by
sustained or intermittent twisting postures. It can be
focal or generalized, while the most common form is
focal cervical dystonia. The symptomatology of this
form of dystonia predominantly comes with twisting
and shifting of the head (Albanese et al., 2013).
There are several scores that quantify this altered
posture and present it in a severity score. An
established score for assessing the severity of
dystonia is the Toronto Western Spasmodic Torticollis
Rating Scale (TWSTRS) (Boyce et al., 2012),
which can be collected by clinicians in a direct
or video based examination (Zhang et al., 2022).
Another score, primarily used for clinical purposes,
is the Global Dystonia Severity Rating Scale (GDS)
(Comella et al., 2003). In the case of the TWSTRS,
the head position is determined by five degrees of
freedom. In addition to the rotation around three
a
https://orcid.org/0000-0002-7590-7286
b
https://orcid.org/0000-0002-3553-5131
axes, the severity of a lateral and saggital shift is
also determined here. Another description of the
head posture can be made according to the caput
and collis concept (Finsterer et al., 2015). Here,
the head posture is determined with the rotation
around an upper and lower rotation center (Figure 2).
Following this concept, a lateral or saggital shift can
be described as a superposition of an opposite rotation
of the roll or pitch, around two rotation centers.
Clinicians can determine the severity of a dystonia
disorder, using such rating scale. There are already
approaches to address this process algorithmically
such as (Ansari et al., 2021). However, the authors
in this paper present an algorithm which decides on
the basis of a video only whether a dystonia disease
is present or not. It does not determine the severity of
the disease, as we are aiming for. Another publication
(Nakamura et al., 2019) deals with the image based
determination of the TWSTRS. Here, in contrast
to our approach, a depth imaging camera is used.
However, such an approach is not as accessible to
subjects in the private environment who do not have
access to a depth imaging camera.
354
Stenger, R., Löns, S., Hamami, F., Brügge, N., Bäumer, T. and Fudickar, S.
Extended Head Pose Estimation on Synthesized Avatars for Determining the Severity of Cervical Dystonia.
DOI: 10.5220/0011677600003414
In Proceedings of the 16th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2023) - Volume 5: HEALTHINF, pages 354-359
ISBN: 978-989-758-631-6; ISSN: 2184-4305
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
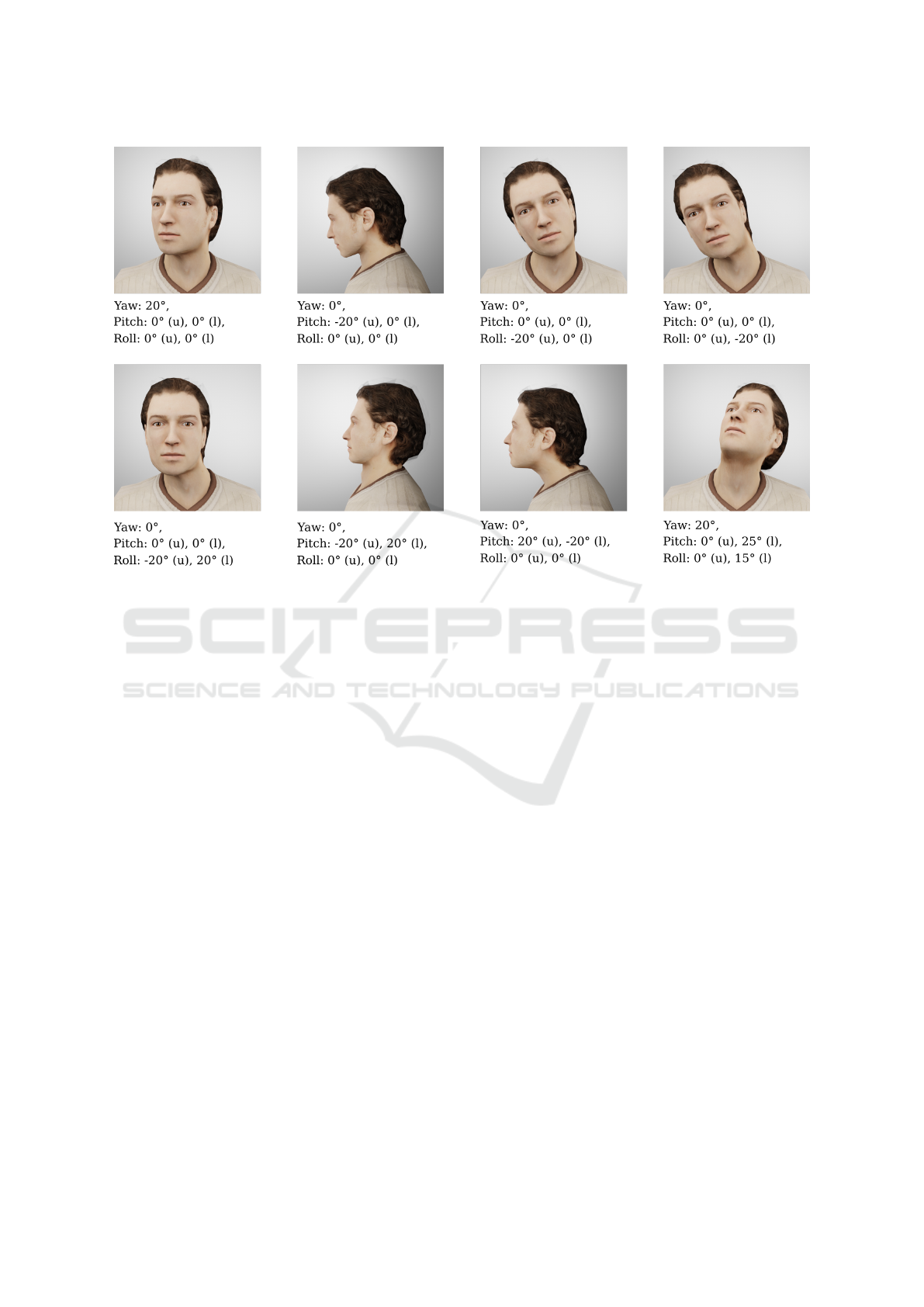
Figure 1: Different types of head postures. Shown are examples of rotations around a single rotation center around one axis,
as well as combinations of such rotations.
From the caput and collis concept, the severity of
cervical dystonia may be derived. We want to follow
this description of the head pose by looking at the
rotation around the two rotation centers. This gives
us five angles that must be predicted for a complete
description of the head posture, which are two pitch
angles, two roll angles and one yaw angle. Due
to the difficulty of distinguishing a rotation of the
yaw around the two centers of rotation (see Figure 1)
from each other, we dispense with this subdivision,
and summarize these rotations in a single angle that
expresses the yaw. In this context, we consider this
description to be reasonably accurate.
We want to train an artificial neural network
(ANN) for predicting the five degrees. However, there
is a lack of publicly available datasets, taking into
account the necessary of the head posture with these
five degrees of freedom. This limits the trainability
of data-driven algorithms. There are public data sets
available, which are suitable for training a head-pose-
estimation algorithm, such as AFLW2000 (Zhu et al.,
2015) or BIWI (Fanelli et al., 2013). Although, in
these data sets, the labels are not complete for our
purpose, since they only specify the absolute head
position in space with three Euler angles. Existing
head pose estimation algorithms that predict the head
pose in space, based on an image such as (Hempel
et al., 2022), (Zhou and Gregson, 2020), (Valle et al.,
2021) are also insufficient since their predicted pale
head pose cannot fully capture the head pose for our
purposes. The head pose must be determined relative
to the body and not absolute.
However, the collection of a new data set for our
purposes, consisting of annotated images of subjects
seems unsuitable for several reasons. First, raters
must be trained to qualify for the task. Systematic
errors of individual raters cannot be excluded, which
is why multiple annotations on the same data would
be necessary to estimate the inter-rater reliability for
quality assurance. Furthermore, the consent to use the
subjects image data must also be obtained.
Due to these disadvantages, we created a synthetic
data set consisting of images of avatars with a
complex head rotation, based on rotations with the
five degrees of freedom. By using a simulated
environment we are able to generate a data set
with thousands of labeled images (samples) and we
have exact information about the head posture which
would not be possible with human annotations in this
accuracy.
Given the synthesized data set, we address the
following research questions (RQ), which we evaluate
in Section 3:
• RQ1: How good is the prediction of the ANN for
each of the five angle predictions?
Extended Head Pose Estimation on Synthesized Avatars for Determining the Severity of Cervical Dystonia
355

• RQ2: What is the influence of the size of the
dataset?
• RQ3: How good is the performance as a function
of the actual angle size?
We test the performance of the network on the
synthesized data only.
2 METHODS
In 2.1 we describe how the data set was generated
by using the open source library for human avatars
Rocketbox (Gonzalez Franco et al., 2020). In 2.2 we
introduce the used ANN architecture and the training
process.
2.1 Generation of the Data Set
Using the Rocketbox library, we have a selection
of 115 rigged human avatars which we can use for
our data set generation. Among the 115 avatars,
40 are adult models and 73 models are related
to a profession, such as a firefighter, nurse, or
athlete. The avatars are rendered with the 3D program
Blender, which allows automatic script based posture
manipulation. For our purposes, avatars whose
neck or head are completely or partially covered
by clothing or headgear were excluded, since it
makes an algorithmic prediction of the head posture
unreasonable. Finally, we consider a selection of 94
avatars, from which a data set consisting of 9239
renderings (samples) of these models is generated,
resulting in around 98 images per avatar.
In each rendering, the head was rotated around the
two specified centers, where each of the five rotation
angles comes from a normal distribution with µ = 0
and σ = 20. The two rotation centers are marked
in Figure 2. The rotation always follows the ZYX
Euler angles, while rotating around the upper center
first, followed by a rotation around the lower center.
Thus, the indications of the rotation angles represent
ZYX Euler angles, insofar as one builds the sum of
the two angles each for pitch and roll. From an
anatomical standpoint, we consider a differentiation
of the rotation center (upper or lower rotation center)
around the yaw rotation as unreasonable. Therefore,
only one angle is used for the rotation of the yaw.
Examples from the data set are visualized in Figure
3.
There is always a difference between the virtual
world and the real world. Although, we want to
train a network that is only based on virtual data,
it should still able to generalize on ”real” images.
Upper rotation center
Lower rotation center
Figure 2: Locations of the two centres of rotation.
Domain randomization (Tobin et al., 2017) can reduce
the visual inconsistency between the rendered images
and real photos of subjects. With this technique,
some visual properties of the image are varied. As
a result, the trained network should be able to
generalize regardless of these variations. It is thus
more likely that such a robust network will also be
able to generalize to real world data. In generating
the data set described here, the varied parameters are
background color, lighting conditions, and camera
position. A transfer of the trained network to real
image data remains a research question to be tested
in the future. In this virtual-only test, however, we
can already investigate how robust the network is in
the face of these randomizations.
2.2 Artificial Neural Network and
Training Process
The ANN for our purpose is an EfficientNetB2
(Tan and Le, 2019), pretrained on ImageNet (Deng
et al., 2009), implemented in PyTorch. For a more
meaningful evaluation, several training runs were
performed in which the images of a single avatar were
withheld from training for test purposes and trained
with all the others. The mean value of this leave-one-
out cross evaluation represents the result. Excluding
one avatar at a time ensures that the training and test
data are not too similar to each other.
For training, a ReduceLROnPlateau scheduler
with an initial learning rate of 0.001 and the general-
purpose layer-wise adaptive large batch optimize
(LAMB) (You et al., 2019) for the Adam-Optimizer
were used. For the loss function, the mean squared
error was chosen. During training time, the data
HEALTHINF 2023 - 16th International Conference on Health Informatics
356
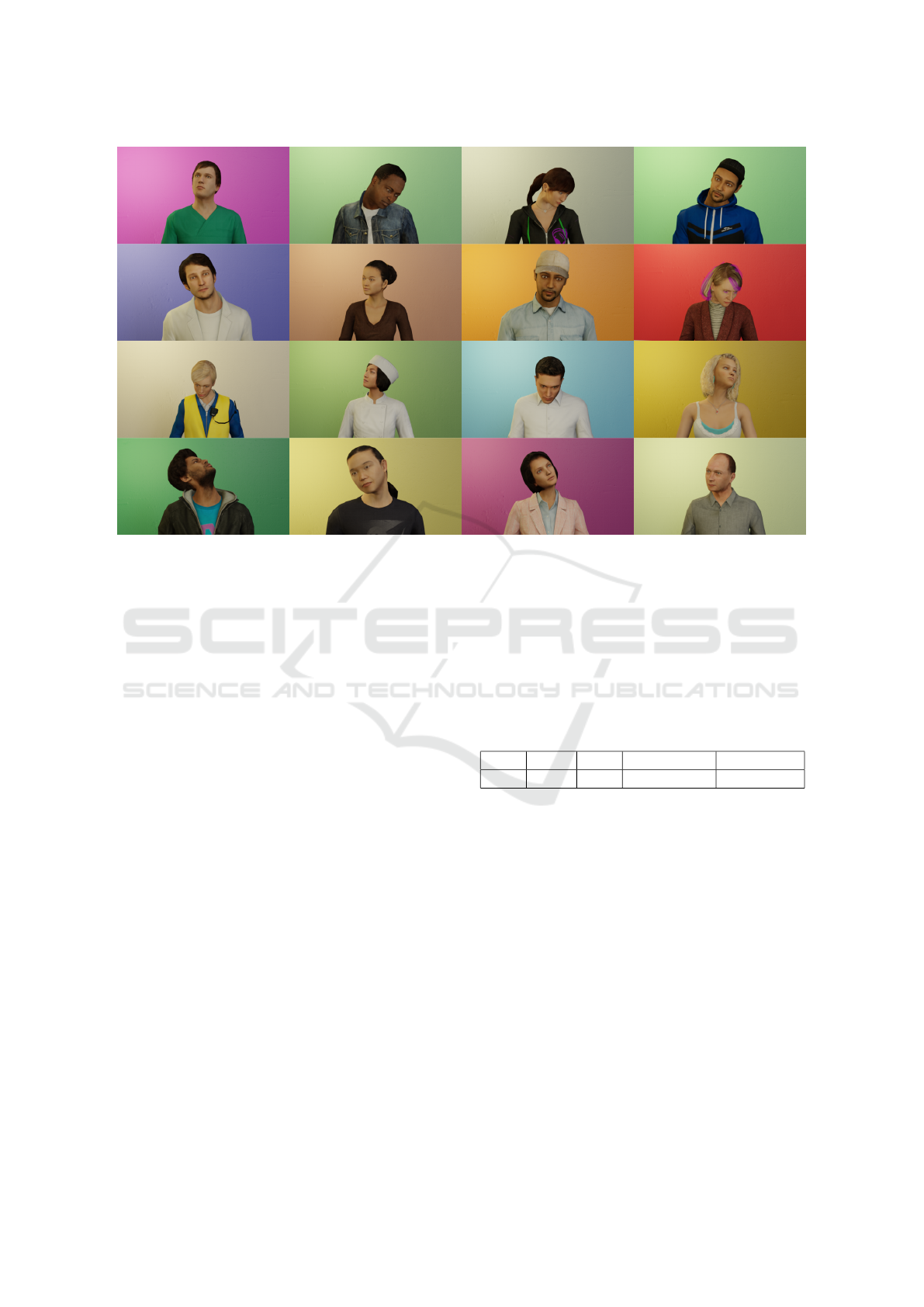
Figure 3: Avatars with random head poses, based on rotations, defined by the five angles, in a visually randomized setting
(background color, lightning conditions, camera position).
was randomly augmented by adjusting the brightness,
hue, and contrast and a Gaussian Blur was applied
with a chance of 50% on each image. Furthermore,
the RGB-values were normalized using the means
and standard deviations from the ImageNet data set.
Since the learning rate is adaptive according to the
ReduceLROnPlateau rule, it depends on the course of
the MSE. The MSE in this concern is computed on
a validation set, which consists of the renderings of
three randomly selected avatars that do not appear in
the training data set.
To evaluate the predictions, we calculate the mean
absolute error (MAE) of the angle predictions. This is
calculated independently for each of the five angles.
Since the rotation angles are taken from a normal
distribution N with
N (µ,σ) = N (0,20) (1)
we assume that it is sufficient to know about the
absolute error without considering large angles of
more than 180°, for each of the angles. The absolute
error is calculated as
AE = ∥θ
pred
− θ
true
∥, and (2)
MAE =
N
∑
i=1
∥θ
pred
− θ
true
∥/N. (3)
3 RESULTS
The average MAE over all leave one out cross
predictions calculates to the following values in Table
1.
Table 1: Summary of results, average MAE in degree [°] of
the Leave-One-Out cross evaluation.
Yaw Pitch Roll Pitch (neck) Roll (neck)
1.79 6.50 4.06 6.55 3.95
Since the six rotation angles are taken from a
probability distribution with µ = 0 and σ = 20, it
would be trivial to always assume an angle of 0°,
which would result in the error being 20° in average.
We can show that the ANN on the data set with 8842
training samples performs much better, but differently
well for the respective angles. The prediction of
the pitch around the upper and lower rotation center
turned out to be the most error-prone. This can
be explained by the fact that a rotation around the
pitch rotation plane shows up visually mainly as a
movement of depth, which might be more difficult to
detect than roll or yaw movements due to the frontal
view. Predictions of the yaw, on the other hand, turn
out to be most accurate. One reason could be that
the two yaw rotations (around the upper and lower
rotation center) are added together and the network
only needs to predict the sum. The resulting decrease
Extended Head Pose Estimation on Synthesized Avatars for Determining the Severity of Cervical Dystonia
357
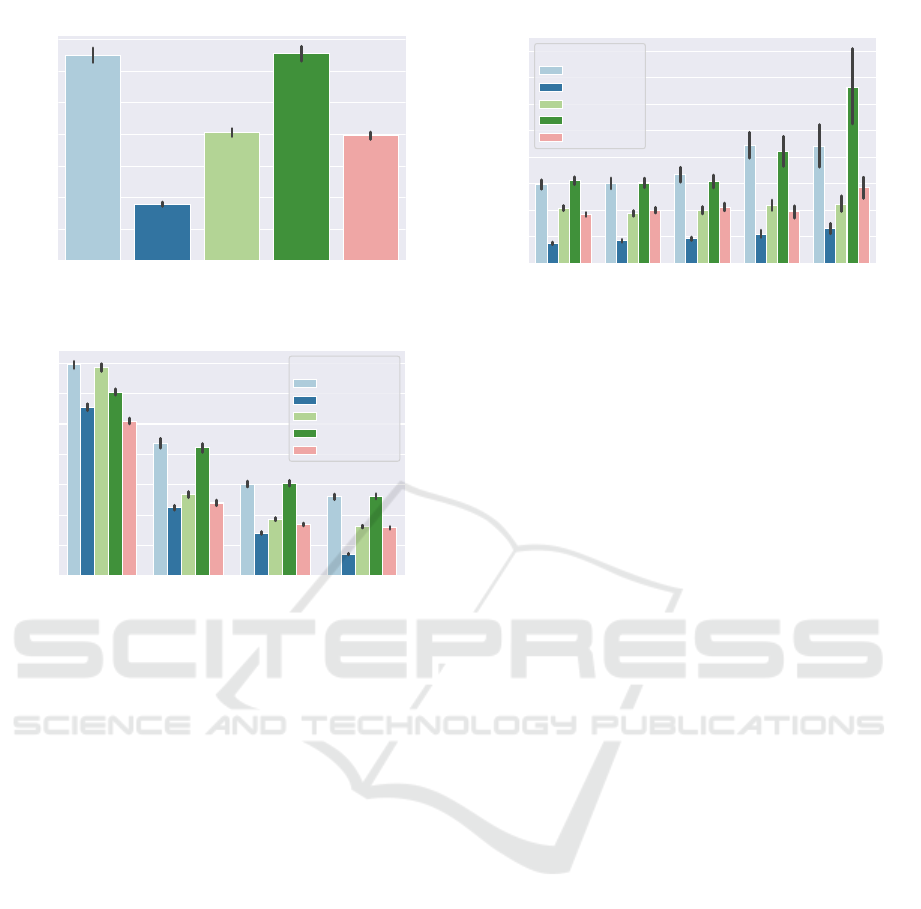
Pitch
Yaw
Roll Pitch (neck) Roll (neck)
Rotations axes
0
1
2
3
4
5
6
7
Mean Absolute Error in degree [°]
Figure 4: Mean absolute error per rotation.
200 500 1000 8842
Training dataset size
0.0
2.5
5.0
7.5
10.0
12.5
15.0
17.5
Mean Absolute Error in degree [°]
Angle
Pitch
Yaw
Roll
Pitch (neck)
Roll (neck)
Figure 5: Mean absolute error in dependence of the training
data set size.
in the complexity of the rotation possibly might lead
to the better result.
According to RQ2 (see section 1), we want
to explore the influence of the amount of training
samples, regarding the MAE on the test data set.
Figure 5 visualizes the MAE in dependency of the
size of subsets of the whole data set, where we trained
with 200, 500, 1000 and the full 8842 samples. A
clear trend is noticeable, that more training data leads
to better results, but with diminishing gain. The trend
underlines the non-triviality of the problem.
Encountering the third research question (RQ3),
we further want to investigate how the error develops
in dependence of the values of the true rotation angles.
As expected, the trend shows that larger angles lead
to a larger absolute error. However, the course of
the error in dependence of the true rotation angle
does not behave the same for the five angles. The
error of the pitch rotation around the lower rotation
center increases considerably more in comparison to
the other angles. We explain this behavior (besides
statistical uncertainties) with the inability of the 3D
models of the avatars to represent a strong rotation of
the pitch (around the lower rotation angle), which is
to be distinguished from the pitch rotation around the
upper center of rotation. In addition, it could also be
0-10 11-20 21-30 31-40 >40
Amount of Rotation [°], categorized
0
2
4
6
8
10
12
14
16
Mean Absolute Error in degree [°]
Angle
Pitch
Yaw
Roll
Pitch (neck)
Roll (neck)
Figure 6: Mean absolute error in dependence of the absolute
true rotation angle.
due to the fact that we only use a picture from the
front as training data. In contrast to the poor trend
of the error in pitch rotations at large angles, the roll
(around both centers of rotation) is comparably well
detectable, which possibly indicates that this rotation
is very well representable by the 3D models.
4 CONCLUSIONS
In this work, we can show that an ANN, in our case
the EfficientNetB2, can make non-trivial predictions
on the data set with synthetically generated avatars
with complex head poses. Having only a front view
towards the avatar, we show, that the error predicting
the respective angles varies considerably strong. This
difference can on the one hand be due to the fact
that the perspective of the renderings plays a role,
since the camera only faces directly at the front of
the avatars. On the other hand, limitations of the
3D models of the avatars can also be the cause,
which maybe can not visualize rotations of the yaw,
pitch and roll equally well. One way to investigate
this would be to generate a new data set containing
renderings from three perspectives. This could be
used to investigate whether the image perspective
causes the errors. At the same time, it would also
be an insight that could play a role for clinicians in
the evaluation of dystonia, that multiple perspectives
are important for being accurate. Such insight may be
considered, when we develop a dataset, consisting of
real subject images to be annotated by experts.
By synthesizing the data set of avatars, we can
show to what extent a ANN can generalize with
respect to our randomization’s in the data set, which
are the camera position, lighting conditions, and
background color. In further research, we would also
like to test the ANN on photographs of real subjects.
We see the use cases of such an algorithm in the
HEALTHINF 2023 - 16th International Conference on Health Informatics
358

assessment of the severity of cervical dystonia, where
the head posture is not only determined by three
degrees of freedom. Previous head pose estimation
algorithms do not address the necessary complexity
of head poses that are symptoms of cervical dystonia.
By generating a large data set to train the neural
network, we see the possibility to address the lack
of large data sets from real subjects with good
quality annotations regarding head posture. While
the network may have achieved good results on the
synthesized avatar data, this may not necessarily
translate to real-world situations where the input
data may be more varied and complex. Testing the
network on real images will allow us to assess how
well it can handle these variations. However, the
extent to which this generalization can also be applied
to real subject images is a question that we want to
address on the basis of this work in the future.
ACKNOWLEDGEMENTS
We acknowledge financial support by the BMBF
(01ZZ2007). Additionally we acknowledge the AI-
Lab L
¨
ubeck, that has provided us with computational
resources for training the neural networks.
REFERENCES
Albanese, A., Bhatia, K., Bressman, S. B., DeLong, M. R.,
Fahn, S., Fung, V. S. C., Hallett, M., Jankovic, J.,
Jinnah, H. A., Klein, C., Lang, A. E., Mink, J. W., and
Teller, J. K. (2013). Phenomenology and classification
of dystonia: A consensus update. Mov. Disord.,
28(7):863–873.
Ansari, S. A., Nijhawan, R., Bansal, I., and Mohanty, S.
(2021). Cervical dystonia detection using facial and
eye feature. In 2021 10th International Conference on
System Modeling & Advancement in Research Trends
(SMART), pages 43–48.
Boyce, M. J., Canning, C. G., Mahant, N., Morris, J.,
Latimer, J., and Fung, V. S. C. (2012). The toronto
western spasmodic torticollis rating scale: reliability
in neurologists and physiotherapists. 18(5):635–637.
Comella, C. L., Leurgans, S., Wuu, J., Stebbins, G. T.,
Chmura, T., and and The Dystonia Study Group
(2003). Rating scales for dystonia: a multicenter
assessment. Mov. Disord., 18(3):303–312.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In 2009 IEEE conference on computer
vision and pattern recognition, pages 248–255. Ieee.
Fanelli, G., Dantone, M., Gall, J., Fossati, A., and Van Gool,
L. (2013). Random forests for real time 3d face
analysis. Int. J. Comput. Vision, 101(3):437–458.
Finsterer, J., Maeztu, C., Revuelta, G. J., Reichel, G.,
and Truong, D. (2015). Collum-caput (COL-CAP)
concept for conceptual anterocollis, anterocaput, and
forward sagittal shift. J. Neurol. Sci., 355(1-2):37–43.
Gonzalez Franco, M., Ofek, E., Pan, Y., Antley, A.,
Steed, A., Spanlang, B., Maselli, A., Banakou,
D., Pelechano, N., Orts-Escolano, S., Orvalho, V.,
Trutoiu, L., Wojcik, M., Sanchez-Vives, M. V.,
Bailenson, J., Slater, M., and Lanier, J. (2020).
The rocketbox library and the utility of freely
available rigged avatars. Frontiers in Virtual
Reality. TECHNOLOGY AND CODE ARTICLE
Front. Virtual Real. — frvir.2020.561558.
Hempel, T., Abdelrahman, A. A., and Al-Hamadi, A.
(2022). 6D rotation representation for unconstrained
head pose estimation.
Nakamura, T., Sekimoto, S., Oyama, G., Shimo, Y., Hattori,
N., and Kajimoto, H. (2019). Pilot feasibility study of
a semi-automated three-dimensional scoring system
for cervical dystonia. PLOS ONE, 14:e0219758.
Tan, M. and Le, Q. V. (2019). EfficientNet: Rethinking
model scaling for convolutional neural networks.
Tobin, J., Fong, R., Ray, A., Schneider, J., Zaremba, W.,
and Abbeel, P. (2017). Domain randomization for
transferring deep neural networks from simulation to
the real world.
Valle, R., Buenaposada, J. M., and Baumela, L. (2021).
Multi-Task head pose estimation in-the-wild. IEEE
Trans. Pattern Anal. Mach. Intell., 43(8):2874–2881.
You, Y., Li, J., Reddi, S., Hseu, J., Kumar, S., Bhojanapalli,
S., Song, X., Demmel, J., Keutzer, K., and Hsieh, C.-
J. (2019). Large batch optimization for deep learning:
Training BERT in 76 minutes.
Zhang, Z., Cisneros, E., Lee, H. Y., Vu, J. P., Chen, Q.,
Benadof, C. N., Whitehill, J., Rouzbehani, R., Sy,
D. T., Huang, J. S., Sejnowski, T. J., Jankovic, J.,
Factor, S., Goetz, C. G., Barbano, R. L., Perlmutter,
J. S., Jinnah, H. A., Berman, B. D., Richardson, S. P.,
Stebbins, G. T., Comella, C. L., and Peterson, D. A.
(2022). Hold that pose: capturing cervical dystonia’s
head deviation severity from video. Ann. Clin. Transl.
Neurol., 9(5):684–694.
Zhou, Y. and Gregson, J. (2020). WHENet: Real-time fine-
grained estimation for wide range head pose.
Zhu, X., Lei, Z., Liu, X., Shi, H., and Li, S. Z. (2015). Face
alignment across large poses: A 3D solution.
Extended Head Pose Estimation on Synthesized Avatars for Determining the Severity of Cervical Dystonia
359
