Pyramid Swin Transformer: Different-Size Windows Swin Transformer
for Image Classification and Object Detection
Chenyu Wang
1,2 a
, Toshio Endo
1 b
, Takahiro Hirofuchi
2 c
and Tsutomu Ikegami
2 d
1
Tokyo Institute of Technology, Tokyo, Japan
2
National Institute of Advanced Industrial Science and Technology (AIST), Tokyo, Japan
Keywords:
Swin Transformer, Object Detection, Image Classification, Feature Pyramid Network, Multiscale.
Abstract:
We present the Pyramid Swin Transformer for object detection and image classification, by taking advantage
of more shift window operations, smaller and more different size windows. We also add a Feature Pyramid
Network for object detection, which produces excellent results. This architecture is implemented in four
stages, containing different size window layers. We test our architecture on ImageNet classification and COCO
detection. Pyramid Swin Transformer achieves 85.4% accuracy on ImageNet classification and 54.3 box AP
on COCO.
1 INTRODUCTION
Both image classification and object detection are
critical tasks in computer vision, and they are used to
identify objects for categorization, such as humans,
animals, fruits, or some buildings. Object detection
will be more complicated than image classifications
since it must recognize the positions of the objects
and produce marks. Currently, object detection is
used for security, medical, self-driving cars, iden-
tity identification, and other purposes. It has experi-
enced an exponential expansion in recent years, along
with the rapid development of new tools and proce-
dures. As convolutional neural networks have been
utilized successfully in computer vision, research on
convolutional neural networks has flourished. They
have been used for various computer vision tasks, in-
cluding image classification and object detection. In
2012, Alexnet(Krizhevsky et al., 2017) achieved a
new accuracy record in the ImageNet Large Scale Vi-
sual Recognition Challenge (ILSVRC)(Russakovsky
et al., 2015).
After Alexnet(Krizhevsky et al., 2017), research
on CNN has shown a blowout outbreak, and research
on various backbone networks such as GoogLeNet
(Szegedy et al., 2015), VGG (Simonyan and Zisser-
man, 2014), and ResNet (He et al., 2016) have fol-
lowed one after another. At the same time, research
a
https://orcid.org/0000-0001-8770-3275
b
https://orcid.org/0000-0001-7297-6211
c
https://orcid.org/0000-0002-1253-6625
d
https://orcid.org/0000-0003-2977-6390
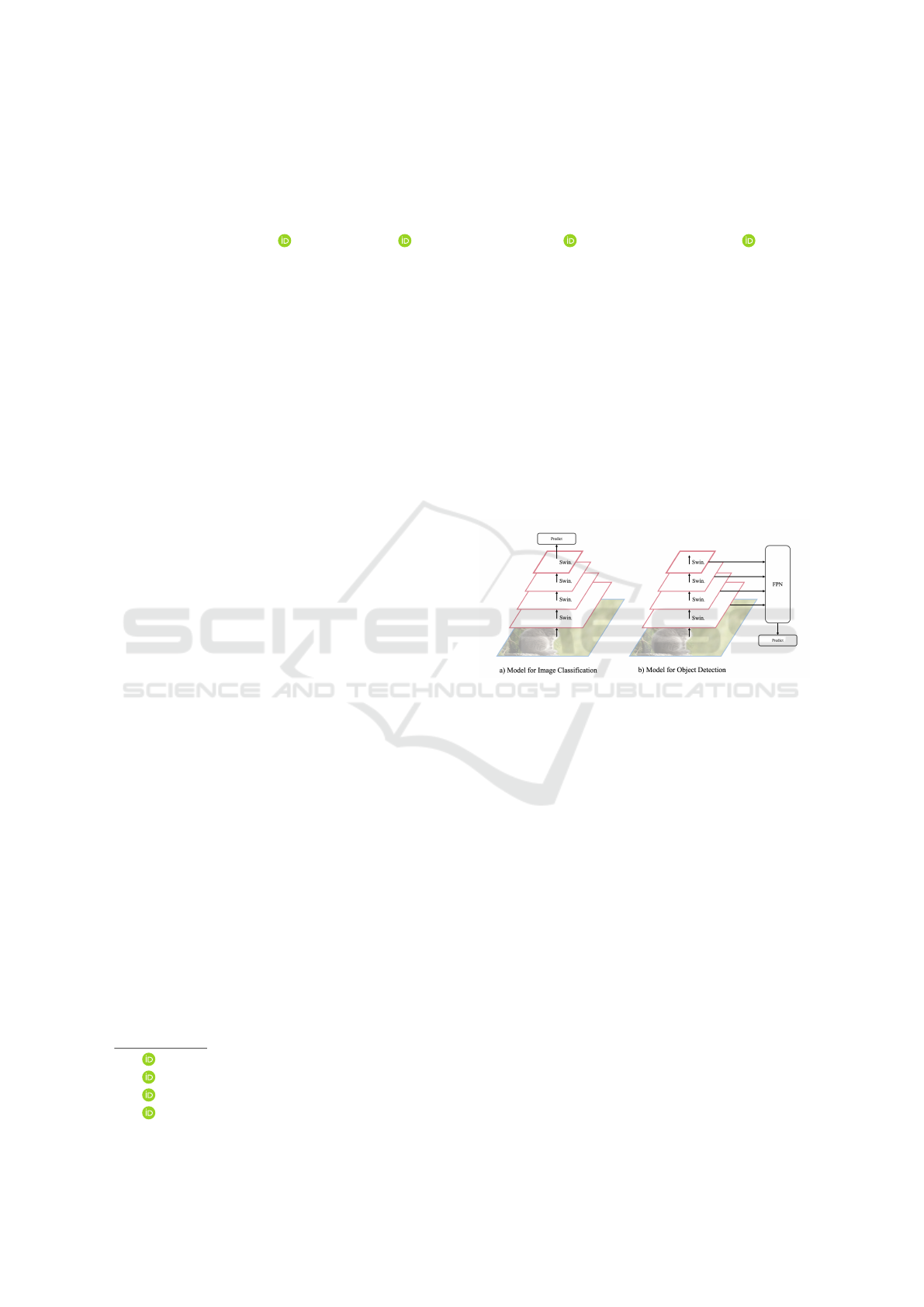
Figure 1: Pyramid Swin Transformer. a) model is used for
image classification, where each layer is feature sampled
with Swin Transformer, and b) model is used for object de-
tection. It adds a feature pyramid network to a) model.
on the object detection framework is also developing,
such as Faster R-CNN(Ren et al., 2015) and Mask
R-CNN(He et al., 2017), which are two-stage detec-
tors. A module presents some candidates, which the
network classifies as objects or backgrounds. Two-
stage detectors can be slower but more accurate than
single-stage detectors, such as YOLO (Redmon et al.,
2016), Single Shot MultiBox Detector (SSD) (Liu
et al., 2016), which are single-stage detectors.
More recently, convolutional neural networks
(CNN) have been outperformed by Vision Trans-
formers (Vit), which have shown potential and have
been modified for usage in various vision applica-
tions.(Arnab et al., 2021; Carion et al., 2020; Beal
et al., 2020; Strudel et al., 2021; Wang et al., 2021).
The Transformer (Vaswani et al., 2017) model is
a relatively new deep learning model. However,
it has been widely researched and applied in natu-
ral language processing (NLP) and computer vision
(CV). The Transformer was initially introduced as a
Wang, C., Endo, T., Hirofuchi, T. and Ikegami, T.
Pyramid Swin Transformer: Different-Size Windows Swin Transformer for Image Classification and Object Detection.
DOI: 10.5220/0011675800003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
583-590
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
583

machine translation sequence-to-sequence (Sutskever
et al., 2014) concept. Later studies have shown that
Transformer-based pre-trained models (PTMs)(Qiu
et al., 2020) can achieve cutting-edge performance
on various tasks. As a result, The Transformer has
become the most preferred design in NLP, particu-
larly for PTMs. In recent research(Dosovitskiy et al.,
2020), the Transformer model has also performed
well in CV tasks. Naturally, Transformer recently
has been utilized in CV(Dosovitskiy et al., 2020; Liu
et al., 2021) and audio processing(Chen et al., 2021;
Dong et al., 2018).
Our Pyramid Swin Transformer is an improved
version of the Swin Transformer(Liu et al., 2021),
and we propose two models, one for image classi-
fication and another for object detection. We im-
prove the original Swin Transformer by using smaller,
more different-size windows and more shift window
operations in order to achieve a better detection ef-
fect, which certainly enhances the detection effect.
Compared to Swin Transformer, our Pyramid Swin
Transformer uses windows of varying sizes on a uni-
fied scale to execute multiple window multi-head self-
attention computation, as shown in Figure 2. This
slightly increases the amount of calculation, but it bet-
ter solves the problem of information interaction be-
tween windows and windows.
2 RELATED WORK
The use of the Transformer for computer vision is ar-
guably an essential attempt in the history of computer
vision. Transformer-like frameworks are what allow
us to get rid of CNN and have better globalization.
With more in-depth research, the model will also be-
come more applicable to computer vision, capable of
performing more tasks quickly and accurately. The
model will also become more useful in computer vi-
sion and can perform more quickly and accurately.
There is no doubt that Swin Transformer(Liu et al.,
2021) is a promising improvement.
2.1 Feature Pyramid Network
The Feature Pyramid Network (FPN)(Lin et al., 2017)
is a high-accuracy and fast feature extractor designed
for this pyramid concept. It can replace detector fea-
ture extractors like Faster R-CNN(Ren et al., 2015)
and generates many feature layers (multi-scale fea-
ture maps) with higher quality information for ob-
ject detection than traditional feature pyramids. FPN
is made up of a bottom-up and a top-down path-
way. The bottom-up route is the standard convo-
lutional network for feature extraction. The spatial
resolution degrades as they ascend, and the semantic
value of each layer grows as more high-level struc-
tures are recognized. FPN offers a top-down approach
to building higher-resolution layers from a semantic-
rich layer. While the reconstructed layers are se-
mantically strong, the positions of objects after all
the down-sampling and up-sampling are not exact.
They improve the detector’s prediction by adding lat-
eral links between reconstructed layers and the asso-
ciated feature map. FPN has been widely employed in
several frameworks for object detection(Ronneberger
et al., 2015; Zhang et al., 2018; Peng et al., 2018)
and semantic segmentation(Liu et al., 2018) because
of its excellent results and practicality, and all of them
have obtained successful outcomes. FPN has been
proven to significantly improve object detection ac-
curacy with a modest increase in processing cost.
2.2 Swin Transformer
The first part of the name Swin Transformer(Liu et al.,
2021) is derived from Shifted Windows, which is
also the main feature of Swin Transformer. The re-
search community is not new to the idea of shifted
windows. As a result of its high efficiency, it is
one of the CNN aspects that has helped the network
succeed in the field of computer vision. However,
it had not been used in Transformers before. The
original intention of Swin Transformer’s authors was
to make Vision Transformer-like a convolution neu-
ral network, which can also be divided into several
blocks for cascading feature extraction, thus leading
to the concept of multi-scale for the proposed fea-
tures. The standard Transformer(Dosovitskiy et al.,
2020) has some challenges when applied directly to
the vision domain. The difficulty comes mainly from
two aspects, namely different scales and the large
resolution of the image. The first problem is scale,
but this phenomenon does not exist in natural lan-
guage processing. To solve the problem of sequence
length, researchers have made a series of attempts, in-
cluding using the subsequent feature map as input to
the Transformer or breaking the image into multiple
patches to reduce the resolution of the image as well
as dividing the images into small windows and then
doing self-attention(Vaswani et al., 2017) computa-
tion in the windows.
Since the self-attention is computed within the
window, its computational complexity grows linearly
rather than squarely with the image size, giving Swin
Transformer the ability to pre-train models at partic-
ularly high resolutions, the hierarchical structure has
the advantage of being flexible enough to provide in-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
584
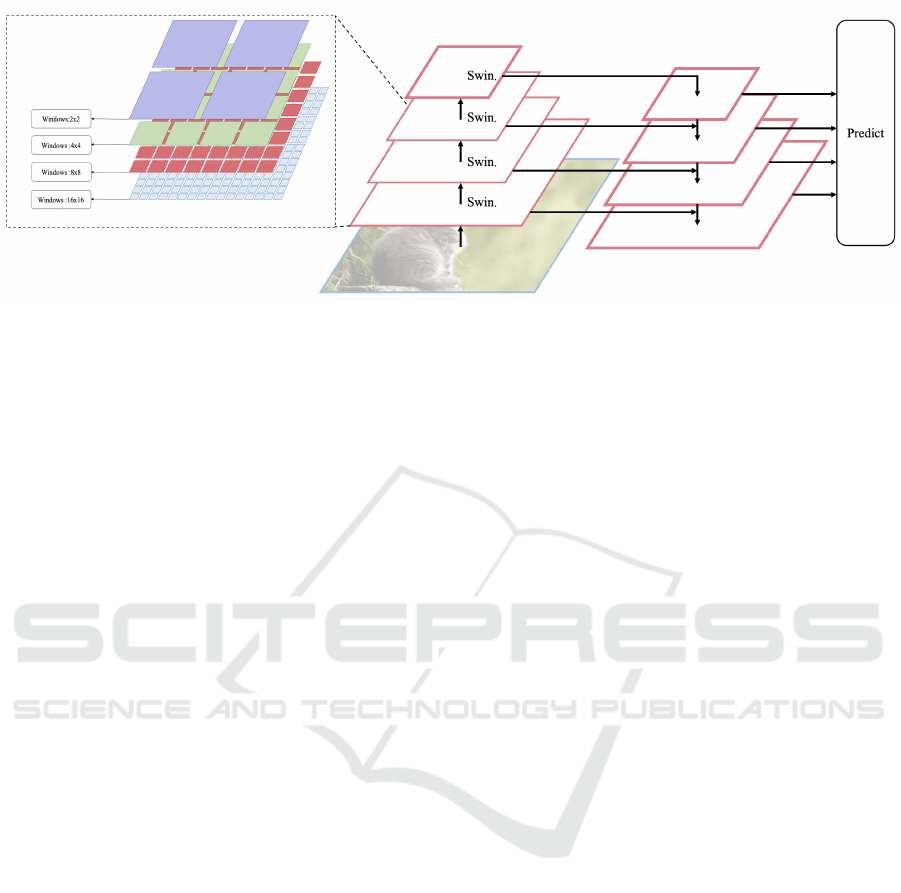
Figure 2: Pyramid Swin Transformer. The part on the right is the overall Pyramid Swin Transformer, where Swin Transformer
computes each layer, and the part on the far right is the part of the Feature Pyramids Network. The part shown on the left is
our Pyramid Swin Transformer, where we use a different size window to compute multi-head self-attention.
formation at different scales. Following the original
Vision Transformer, the Swin Transformer is likely
one of the most exciting pieces of research. The Swin
Transformer resolved the original Vit’s problems by
using hierarchical feature maps and shifting window
multi-head self-attention. The Swin Transformer is
now widely applied as a backbone architecture in var-
ious vision tasks, such as image classification and ob-
ject detection.
Swin Transformer does a wonderful job of resolv-
ing the multi-scale and computational complexity is-
sues in Vit(Dosovitskiy et al., 2020), but it also brings
a few new issues due to the usage of window multi-
self-attention, which makes the windows indepen-
dent of one another. Although the authors incorpo-
rated shift-window multi-head self-attention, which
enables specific windows to be connected, there is
still a lack of information interaction between some
windows in large-scale dimensions. Therefore, we
present the Pyramid Swin Transformer in order to
look forward to solving the communication problem
between windows. As a result, it seems to deal with
the problem at some extend.
3 METHOD
Recent developments in vision Transformer backbone
designs are mostly concerned with attention opera-
tor advancements. A new topology design can add a
new dimension to Vits, allowing for even more pow-
erful vision expressiVity. One of the best is the Swin
Transformer(Liu et al., 2021), on which our research
is based. In this section, we will go into the structure
of our Pyramid Swin Transformer.
3.1 Architecture
Our architecture is mainly based on the Swin Trans-
former(Liu et al., 2021), as shown in Figure 2, our ar-
chitecture for object detection adds a feature pyramid
part and adjusts the original Swin Transformer. We
use a hierarchical network, where the first stage size
is the largest one(64 ×64). In this stage, we divide the
feature map into four types(16 ×16,8 ×8,4×4,2 ×2
windows), which corresponding window sizes are
4 ×4, 8 ×8, 16 ×16 and 32 ×32. In the window size
of 32 ×32, the length of self-attention is 1024, which
will bring much computation, so this size of the win-
dow we only use in stage 1, other stages will never
utilize this size window.
Each layer consists of two steps, one for win-
dow multi-head self-attention and the next for shift
window multi-head self-attention, each layer is the
same and includes two computations of multi-head
self-attention, which is also the same in Swin Trans-
former(Liu et al., 2021), as shown in Figure 3, except
that we split it into smaller blocks, and the number of
different-size windows in each layer is the hierarchi-
cal progression from more to less, which is more con-
ducive to global connection. When computing shift
window multi-head self-attention, we only compute
shift window multi-head self-attention once in each
layer in order to decrease the computation. Each stage
of the last layer, except the fourth stage will have a
2 ×2 window, increasing window-to-window infor-
mation interaction. As a result, increasing global rel-
evance.
The overall architecture is shown in Table 1. The
size of our input image is 256 ×256, we call it Pyra-
mid Swin-R, and the first stage has 4 layers, the sec-
ond stage has 3 layers, the third stage has 2 layers, and
the last stage has 2 layers. We also implement another
framework, the Pyramid Swin-R, which differs from
Pyramid Swin Transformer: Different-Size Windows Swin Transformer for Image Classification and Object Detection
585

the Pyramid Swin-L only in the number of channels
and layers. The details are as follows:
• Pyramid Swin-R: C=96, layer={4,3,2,2}
• Pyramid Swin-L: C=192, layer={4,3,3,2}
where C is the layer channel number in the first
stage. Each layer consists of two sub-multi-head self-
attention calculations.
We utilize different window sizes in each layer,
and the next layer complements the previous one. The
problem with Swin Transformer was insufficient in-
formation interaction between windows and windows
at the low semantic level, and our improvements have
enhanced the information interaction between sepa-
rate windows. The main concept behind the Pyramid
Swin Transformer is to keep adding windows of var-
ious sizes to a uniform scale to improve their direct
information contact.
Supposing each window contains 2
i
×2
i
window
sizes, on an image of size h × w feature map, the
computational complexity of a global multi-head self-
attention module and a window-based one is as fol-
lows:
Ω(MSA) = 4hwC
2
+ 2(hw)
2
C
Ω(W −MSA) = 4hwC
2
+ (2)
2i+1
hwC
Where C is a channel and the former is quadratic to
feature map size h ×w, and the latter depends mainly
on the size of i, which i ∈ {0,5}. In our design, be-
cause the computation is too large when i = 5, we try
to minimize the case of i = 5 in the whole framework.
Actually, we only use i = 5 once at the first layer of the
first stage. While window multi-head self-attention is
scalable for h ×w, global self-attention computation
is typically costly. Therefore, window self-attraction
has excellent potential for lowering computation re-
quirements.
For self-attention computation, we follow (Raffel
et al., 2020; Hu et al., 2019; Liu et al., 2021) by in-
cluding a relative position bias β ∈ R
M
2
×M
2
to each
head:
Attention(Q,K,V ) = So f tMax(QK
T
/
√
d + β)V,
where Q,K,V ∈ R
M
2
×d
are the query,key and value
matrices, d is the query and key dimension and M
2
is
the window size.
3.2 Pyramid Swin for Object Detection
We will introduce how to apply the Pyramid Swin
Transformer backbone for object detection. Pyramid
Swin Transformer’s hierarchical structure generates
multiscale feature maps in four phases. We integrate
neatly into Feature Pyramid Networks (FPN) for ob-
ject detection applications, as shown in figure 2. Our
Pyramid Swin Transformer creates semantically ro-
bust feature maps at all scales using a top-down pyra-
mid with lateral connections in FPN. By using FPN
with the Pyramid Swin Transformer backbone, we
apply it to different detection architectures. In Fea-
ture Pyramid Network, we use pixel shuffle for im-
plementation to upsample feature maps of small size,
which in our experiments can achieve better results
than the normal pooling method. We have always set
the feature pyramid’s channel to 96, and it correlates
to the Swin Transformer’s portion on the left side of
the pyramid.
Object detection often uses training inputs with
a range of input sizes than ImageNet classification,
where the input image is a crop with a set resolution
(such as 224×224). We initialize the parameters from
the ImageNet pre-training weights to respond to the
location embedding with a 256 ×256 input size and
then interpolate them to their respective sizes for ob-
ject detection training.
4 EXPERIMENT
We conduct experiments on ImageNet-1K image clas-
sification (Deng et al., 2009), COCO object detection
(Lin et al., 2014). In the following sections, we will
compare the suggested Pyramid Swin Transformer ar-
chitecture to the prior state-of-the-art on two tasks.
4.1 Image Classification on ImageNet
Settings. To be fair, we benchmark the proposed
Pyramid Swin Transformer on ImageNet-1K(Deng
et al., 2009), which contains 1.28M training images
and 50K validation images from 1,000 classes. On
a single crop, the top-1 accuracy is reported. Swin
Transformer is used in our training methods.(Liu
et al., 2021). ImageNet-1K training. This setting
mostly follows (Touvron et al., 2021). We employ
an AdamW (Kingma and Ba, 2014) optimizer for 300
epochs using a cosine decay learning rate scheduler,
as same as the Swin Transformer (Liu et al., 2021).
We include most of the augmentation and regulariza-
tion strategies of (Touvron et al., 2021) in training,
except for repeated augmentation (Hoffer et al., 2020)
and EMA (Polyak and Juditsky, 1992). Note that this
contrasts the situation where consistent augmentation
is essential to maintain Vit training(Dosovitskiy et al.,
2020).
Image Classification on ImageNet. Table 2 shows
the results of our Pyramid Swin Transformer and
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
586
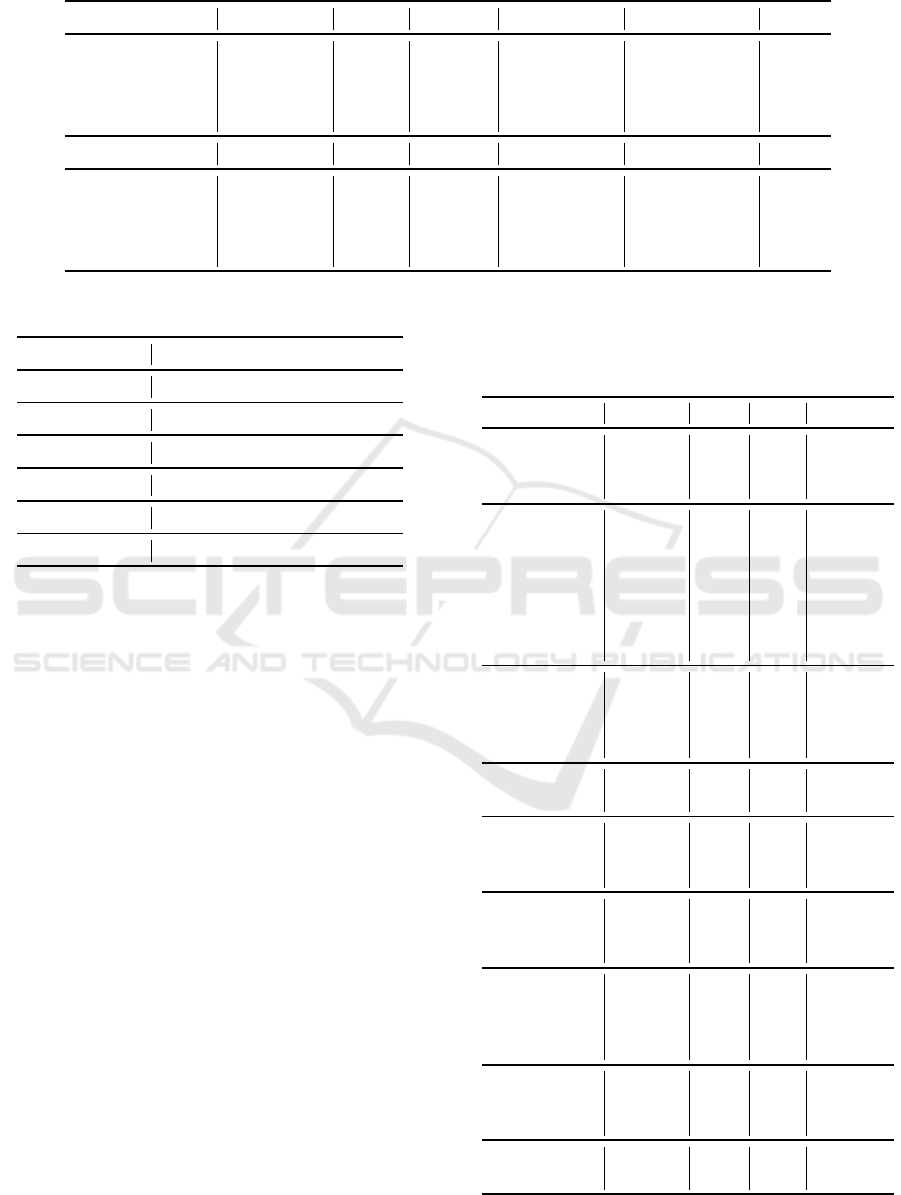
Table 1: Pyramid Swin Transformer Detailed architecture specifications. Input image size is 256 ×256.
Pyramid Swin-R Output Size Layers Channel Windows Window size Heads
Stage 1 64
2
4 96 16
2
,8
2
,4
2
,2
2
4
2
,8
2
,16
2
,32
2
3
Stage 2 32
2
3 192 8
2
,4
2
,2
2
4
2
,8
2
,16
2
6
Stage 3 16
2
2 384 4
2
,2
2
4
2
,8
2
12
Stage 4 8
2
2 768 2
2
,1
2
4
2
,8
2
24
Pyramid Swin-L Output Size Layers Channel Windows Window size Heads
Stage 1 64
2
4 192 16
2
,8
2
,4
2
,2
2
4
2
,8
2
,16
2
,32
2
3
Stage 2 32
2
3 384 8
2
,4
2
,2
2
4
2
,8
2
,16
2
6
Stage 3 16
2
3 768 8
2
,4
2
,2
2
2
2
,4
2
,8
2
12
Stage 4 8
2
2 1536 2
2
,1
2
4
2
,8
2
24
Table 2: Test Environment.
CPU Intel(R) Xeon(R) Silver 4110
Memory 16G
GPU NVIDIA Tesla V100 PCIe
GPU Memory 16G
Pytorch 1.7.1
CUDA 11.6
OS Ubuntu 18.04
state-of-the-art CNNs and Transformers. Based
on computation, the models are divided into cate-
gories. Compared with the state-of-the-art Convolu-
tion Nets and Vision transformer models such as Reg-
Net (Radosavovic et al., 2020), EfficientNet (Tan and
Le, 2019),CoAtNet(Dai et al., 2021),Vit(Dosovitskiy
et al., 2020), DeiT(Touvron et al., 2021), MVit(Fan
et al., 2021), Swin (Liu et al., 2021) and Swinv2(Liu
et al., 2022), our Pyramid Swin Transformer achieves
slightly better accuracy. All details are shown in Table
3.
Comparison on Imagenet. Our design outperforms
several CNN systems even when we utilize a regu-
lar model(Pyramid Swin-R). In image classification,
our design has no evident advantages over Trans-
former systems. Compared to Swin Transformer(Liu
et al., 2021), our improved Pyramid Swin Trans-
former has greater accuracy than Swin Transformer
while using fewer FLOPs and parameters. For exam-
ple, Pyramid Swin-R (84.6%) achieved the same re-
sult as SwinV2-B(Liu et al., 2022). This shows that
the overall architecture of Swin Transformer has a lot
of limitations, and the immediate increase in the num-
ber of parameters does not yield good results. On
the regular-size model, Pyramid Swin-R (84.6%) im-
proves +0.1% over Swin-B but with fewer FLOPs and
parameters. On the large-size model, Pyramid Swin-
Table 3: Comparison with previously reported ImageNet-
1K work. We make pretrain on ImageNet-1K. Pyramid
Swin is trained for 300 epochs without any external data
or models.
Method Resolution Params FLOPs Top-1 Acc.
RegNetY-4G 224
2
21M 4G 80.0
RegNetY-8G
224
2
39M 8G 81.7
RegNetY-16G 224
2
84M 16G 82.9
EfficientNet-B1 240
2
8M 1G 78.8
EfficientNet-B2 260
2
9M 1G 79.8
EfficientNet-B3 300
2
12M 2G 81.6
EfficientNet-B4 380
2
19M 4G 82.9
EfficientNet-B5 456
2
30M 10G 83.6
EfficientNet-B6 528
2
43M 19G 84.0
EfficientNet-B7 600
2
66M 37G 84.4
CoAtNet-0 224
2
25M 4G 81.6
CoAtNet-1 224
2
42M 8G 83.3
CoAtNet-2 224
2
75M 16G 84.1
CoAtNet-3 224
2
168M 35G 84.6
Vit-B/16 384
2
86M 55G 77.9
Vit-L/16 384
2
307M 191G 76.5
DeiT-S 224
2
22M 5G 79.8
DeiT-B 224
2
86M 18G 81.8
DeiT-B 384
2
86M 55G 83.1
MVit-B-16 224
2
37M 8G 83.0
MVit-B-24 224
2
72M 15G 84.0
MVit-B-24 320
2
73M 33G 84.8
Swin-T 224
2
28M 5G 81.3
Swin-S 224
2
50M 9G 83.0
Swin-B 224
2
88M 15G 83.5
Swin-B 384
2
88M 47G 84.5
SwinV2-T 256
2
28M 7G 82.8
SwinV2-S 266
2
50M 13G 84.1
SwinV2-B 256
2
88M 22G 84.6
P. Swin-R 256
2
77M 18G 84.6
P. Swin-L 256
2
164M 39G 85.4
Pyramid Swin Transformer: Different-Size Windows Swin Transformer for Image Classification and Object Detection
587
L (85.4%) improves +0.8% over SwinV2-B (84.6%).
Our Pyramid Swin Transformer is only more accu-
rate than Swin-B +0.1% with an equal size model.
However, Swin-B utilizes a higher resolution. We get
the same accuracy as SwinV2-B with the same image
size, but our computation is fewer. Compared with
MVit (320 ×320), our large model(Pyramid Swin-L)
has a higher accuracy rate, but the amount of compu-
tation is also greatly increased. Compared with MVit
(224 × 224), our regular model((Pyramid Swin-R))
has a +0.6% accuracy. The effect of our architecture
on image classification is not so obvious, and the main
contribution is to reduce the same amount of compu-
tation while maintaining accuracy.
4.2 Object Detection on COCO
Settings. We conduct object detection experiments on
the Microsoft COCO(Lin et al., 2014) dataset. An ab-
lation study is conducted using the validation set, and
test-dev is used to report on a system-level compari-
son. We use standard Mask R-CNN (He et al., 2017)
and Cascade Mask R-CNN (Cai and Vasconcelos,
2018) detection frameworks implemented in Detec-
tron. The backbone networks of the objects we com-
pared are Resnet(He et al., 2016), ResNet(Xie et al.,
2017), PVT-S(Wang et al., 2021), ViL-S-RPB(Zhang
et al., 2021) and Swin(Liu et al., 2021). For a fair
comparison, we follow the same way as Swin Trans-
former (Liu et al., 2021). For these four frame-
works, we utilize the same settings: multi-scale train-
ing (Carion et al., 2020; Sun et al., 2021). For Pyra-
mid Swin, we take the backbone pre-trained from
Imagenet-1K. The input sizes are set as [64, 32,16,8]
for multi-scale four stages, consistent with the self-
attention size used in Imagenet-1K pre-training.
With Mask R-CNN. On the regular size model, our
Pyramid Swin achieves the highest accuracy when
we utilize the framework of Mask R-CNN. Pyra-
mid Swin-R 50.3 box AP improves +1.8 box AP
over Swin-B(Liu et al., 2021) with fewer FLOPs
and parameters. Compared to Vit-B-RPB, our Pyra-
mid Swin has an advantage, with +0.7 box AP im-
provement. On the large-size model Pyramid Swin-L
achieves 51.6 box AP, improving +3.1 box AP over
Swin-B with far more FLOPs and parameters.
With Cascade Mask R-CNN. On the regular size
model, our Swin also achieves the highest accuracy
when we utilize the framework of Cascade Mask R-
CNN. Pyramid Swin-R gets 53.6 box AP improving
+1.7 box AP over Swin-B with fewer FLOPs and pa-
rameters. Our Pyramid Swin-L achieves 54.3 box AP
for the large-size model, improving +2.4 box AP over
Swin-B. Our Pyramid Swin Transformer is less effec-
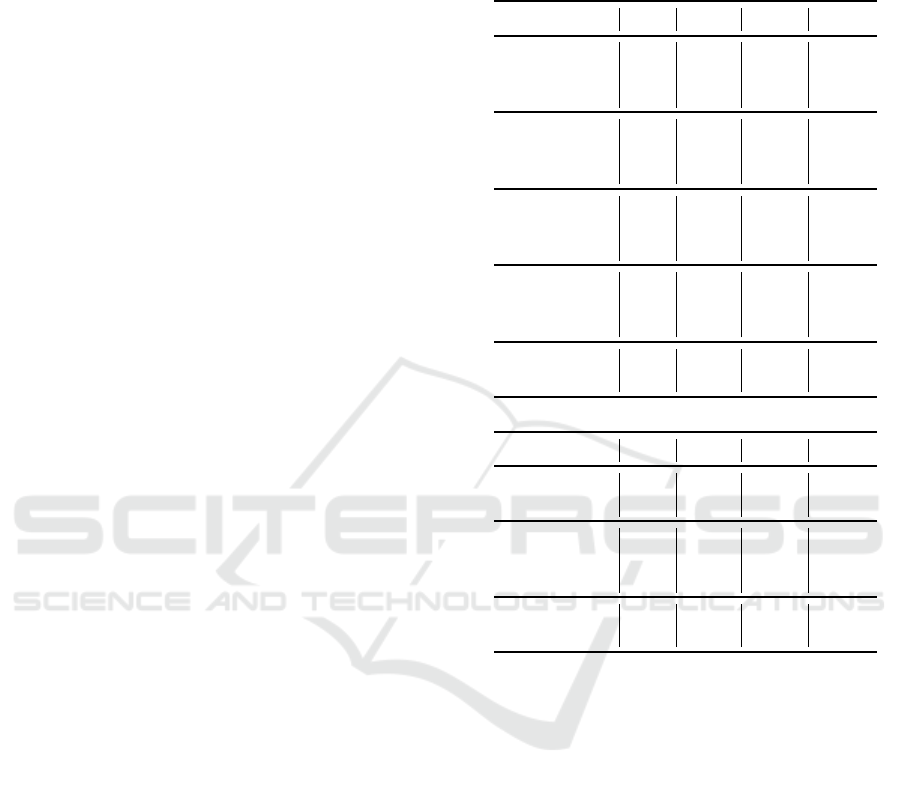
Table 4: Results on COCO object detection.C.Mask in-
dicates Cascade Mask R-CNN, R.Pointsv2 indicates Rep-
Pointsv2.
a) Mask R-CNN
Model AP
box
AP
mask
FLOPs Params
Res50 41.0 37.1 260G 44M
Res101 42.8 38.5 336G 63M
X101-64 44.4 39.7 493G 101M
PVT-S 43.0 39.9 245G 44M
PVT-M 44.2 40.5 302G 64M
PVT-L 44.5 40.7 364G 81M
ViL-S-RPB 47.1 42.1 277 G 45M
ViL-M-RPB 48.9 44.2 352G 60M
ViL-B-RPB 49.6 44.5 384G 76M
Swin-T 46.0 41.6 264G 48M
Swin-S 48.5 43.3 354G 69M
Swin-B 48.5 43.4 496G 107M
P. Swin-R 50.3 44.8 463G 94M
P. Swin-L 51.6 45.3 1014G 193M
b) Cascade Mask R-CNN
Model AP
box
AP
mask
FLOPs Params
Res50 46.3 40.1 739G 82M
Res101 47.7 40.8 819G 101M
Swin-T 50.5 43.7 745G 86M
Swin-S 51.8 44.7 838G 107M
Swin-B 51.9 45.0 982G 145M
P. Swin-R 53.6 46.4 902G 136M
P. Swin-L 54.3 47.1 1867G 273M
tive in image classification than in object detection be-
cause we did not improve Swin’s original framework
significantly, improving the effect on image classi-
fication a little, not obvious. In contrast, a feature
pyramid network is added for object detection, ob-
taining more significant results. As seen from Swin,
from Swin-S to Swin-B, the number of parameters
and FLOPs are also increased, but there is no sig-
nificant effect. We can conclude that if computing
does not significantly rise, it may be the limit of the
Swin framework. We have addressed this weakness
by slightly increasing computation while still obtain-
ing an acceptable outcome.
5 CONCLUSION
This time we publish an improved version of the Swin
Transformer, the Pyramid Swin Transformer, where
we use windows of different sizes to perform win-
dow multiple multi-head self-attention operations on
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
588

the same scale, improving the Swin Transformer. For
the Pyramid Swin Transformer, we created two mod-
els for image classification and object detection. For
image classification, our Pyramid Swin-R achieves
the same results as SwinV2-B(Liu et al., 2022) on
the Imagenet-1k test. At the same time, the Pyramid
Swin-L model outperforms the original framework by
+0.6%, and we achieve better results for object de-
tection. When we use the Mask R-CNN framework,
Pyramid Swin-R achieves 50.3 box AP and 44.8 mask
AP, Pyramid Swin-L achieves 51.6 box AP and 45.3
mask AP, and when we use the Cascade Mask R-CNN
framework, our Pyramid Swin-R gains 53.6 box AP
and 46.4 mask AP. Pyramid Swin-L achieves 54.3 box
AP and mask AP, improving Swin Transformer box
AP and mask AP significantly. In the future, we aim
to do some speed tests and develop some lighter archi-
tectures for more in-depth comparative testing with
existing architectures. We will add Semantic Seg-
mentation on ADE20K(Zhou et al., 2019) and video
recognition on Kinetics-400(Kay et al., 2017), which
are also an important metrics for judging our architec-
ture.
ACKNOWLEDGEMENT
This work was partly supported by JSPS KAKENHI
Grant Number 20H04165.
REFERENCES
Arnab, A., Dehghani, M., Heigold, G., Sun, C., Lu
ˇ
ci
´
c, M.,
and Schmid, C. (2021). Vivit: A video vision trans-
former. In Proceedings of the IEEE/CVF Interna-
tional Conference on Computer Vision, pages 6836–
6846.
Beal, J., Kim, E., Tzeng, E., Park, D. H., Zhai, A., and
Kislyuk, D. (2020). Toward transformer-based object
detection. arXiv preprint arXiv:2012.09958.
Cai, Z. and Vasconcelos, N. (2018). Cascade r-cnn: Delving
into high quality object detection. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 6154–6162.
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., and Zagoruyko, S. (2020). End-to-end object de-
tection with transformers. In European conference on
computer vision, pages 213–229. Springer.
Chen, X., Wu, Y., Wang, Z., Liu, S., and Li, J. (2021).
Developing real-time streaming transformer trans-
ducer for speech recognition on large-scale dataset.
In ICASSP 2021-2021 IEEE International Confer-
ence on Acoustics, Speech and Signal Processing
(ICASSP), pages 5904–5908. IEEE.
Dai, Z., Liu, H., Le, Q. V., and Tan, M. (2021). Coatnet:
Marrying convolution and attention for all data sizes.
Advances in Neural Information Processing Systems,
34:3965–3977.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Dong, L., Xu, S., and Xu, B. (2018). Speech-transformer: a
no-recurrence sequence-to-sequence model for speech
recognition. In 2018 IEEE International Confer-
ence on Acoustics, Speech and Signal Processing
(ICASSP), pages 5884–5888. IEEE.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., et al. (2020). An image is
worth 16x16 words: Transformers for image recogni-
tion at scale. arXiv preprint arXiv:2010.11929.
Fan, H., Xiong, B., Mangalam, K., Li, Y., Yan, Z., Ma-
lik, J., and Feichtenhofer, C. (2021). Multiscale vi-
sion transformers. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
6824–6835.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hoffer, E., Ben-Nun, T., Hubara, I., Giladi, N., Hoefler, T.,
and Soudry, D. (2020). Augment your batch: Improv-
ing generalization through instance repetition. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 8129–8138.
Hu, H., Zhang, Z., Xie, Z., and Lin, S. (2019). Local
relation networks for image recognition. In 2019
IEEE/CVF International Conference on Computer Vi-
sion (ICCV), pages 3463–3472.
Kay, W., Carreira, J., Simonyan, K., Zhang, B., Hillier, C.,
Vijayanarasimhan, S., Viola, F., Green, T., Back, T.,
Natsev, P., et al. (2017). The kinetics human action
video dataset. arXiv preprint arXiv:1705.06950.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2017). Im-
agenet classification with deep convolutional neural
networks. Communications of the ACM, 60(6):84–90.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariharan, B.,
and Belongie, S. (2017). Feature pyramid networks
for object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2117–2125.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Pyramid Swin Transformer: Different-Size Windows Swin Transformer for Image Classification and Object Detection
589

Liu, S., Qi, L., Qin, H., Shi, J., and Jia, J. (2018). Path ag-
gregation network for instance segmentation. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition, pages 8759–8768.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). Ssd: Single shot
multibox detector. In European conference on com-
puter vision, pages 21–37. Springer.
Liu, Z., Hu, H., Lin, Y., Yao, Z., Xie, Z., Wei, Y., Ning,
J., Cao, Y., Zhang, Z., Dong, L., et al. (2022). Swin
transformer v2: Scaling up capacity and resolution.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 12009–
12019.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin,
S., and Guo, B. (2021). Swin transformer: Hierarchi-
cal vision transformer using shifted windows. In Pro-
ceedings of the IEEE/CVF International Conference
on Computer Vision, pages 10012–10022.
Peng, C., Xiao, T., Li, Z., Jiang, Y., Zhang, X., Jia, K.,
Yu, G., and Sun, J. (2018). Megdet: A large mini-
batch object detector. In Proceedings of the IEEE con-
ference on Computer Vision and Pattern Recognition,
pages 6181–6189.
Polyak, B. T. and Juditsky, A. B. (1992). Acceleration of
stochastic approximation by averaging. SIAM journal
on control and optimization, 30(4):838–855.
Qiu, X., Sun, T., Xu, Y., Shao, Y., Dai, N., and Huang,
X. (2020). Pre-trained models for natural language
processing: A survey. Science China Technological
Sciences, 63(10):1872–1897.
Radosavovic, I., Kosaraju, R. P., Girshick, R., He, K., and
Doll
´
ar, P. (2020). Designing network design spaces.
In Proceedings of the IEEE/CVF conference on com-
puter vision and pattern recognition, pages 10428–
10436.
Raffel, C., Shazeer, N., Roberts, A., Lee, K., Narang, S.,
Matena, M., Zhou, Y., Li, W., Liu, P. J., et al. (2020).
Exploring the limits of transfer learning with a uni-
fied text-to-text transformer. J. Mach. Learn. Res.,
21(140):1–67.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. Advances in neural information
processing systems, 28.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., et al. (2015). Imagenet large scale visual
recognition challenge. International journal of com-
puter vision, 115(3):211–252.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Strudel, R., Garcia, R., Laptev, I., and Schmid, C. (2021).
Segmenter: Transformer for semantic segmentation.
In Proceedings of the IEEE/CVF International Con-
ference on Computer Vision, pages 7262–7272.
Sun, P., Zhang, R., Jiang, Y., Kong, T., Xu, C., Zhan,
W., Tomizuka, M., Li, L., Yuan, Z., Wang, C.,
et al. (2021). Sparse r-cnn: End-to-end object detec-
tion with learnable proposals. In Proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition, pages 14454–14463.
Sutskever, I., Vinyals, O., and Le, Q. V. (2014). Sequence
to sequence learning with neural networks. Advances
in neural information processing systems, 27.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 1–9.
Tan, M. and Le, Q. (2019). Efficientnet: Rethinking model
scaling for convolutional neural networks. In Interna-
tional conference on machine learning, pages 6105–
6114. PMLR.
Touvron, H., Cord, M., Douze, M., Massa, F., Sablayrolles,
A., and J
´
egou, H. (2021). Training data-efficient
image transformers & distillation through attention.
In International Conference on Machine Learning,
pages 10347–10357. PMLR.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. Advances in neural
information processing systems, 30.
Wang, W., Xie, E., Li, X., Fan, D.-P., Song, K., Liang, D.,
Lu, T., Luo, P., and Shao, L. (2021). Pyramid vi-
sion transformer: A versatile backbone for dense pre-
diction without convolutions. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 568–578.
Xie, S., Girshick, R., Doll
´
ar, P., Tu, Z., and He, K. (2017).
Aggregated residual transformations for deep neural
networks. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 1492–
1500.
Zhang, P., Dai, X., Yang, J., Xiao, B., Yuan, L., Zhang, L.,
and Gao, J. (2021). Multi-scale vision longformer:
A new vision transformer for high-resolution image
encoding. In Proceedings of the IEEE/CVF Interna-
tional Conference on Computer Vision, pages 2998–
3008.
Zhang, Z., Zhang, X., Peng, C., Xue, X., and Sun, J. (2018).
Exfuse: Enhancing feature fusion for semantic seg-
mentation. In Proceedings of the European conference
on computer vision (ECCV), pages 269–284.
Zhou, B., Zhao, H., Puig, X., Xiao, T., Fidler, S., Barriuso,
A., and Torralba, A. (2019). Semantic understanding
of scenes through the ade20k dataset. International
Journal of Computer Vision, 127(3):302–321.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
590
