Dense Point-to-Point Correspondences Between Genus-Zero Shapes
Using Cubic Mapping and Horn-Schunck Optical Flow
Pejman Hashemibakhtiar
1,2
, Thierry Cresson
1,2
, Jacques De Guise
1,2
and Carlos Vázquez
1,2
1
Département de Génie Logiciel et TI, École de Technologie Supérieure (ÉTS), Montréal, Canada
2
Laboratoire de Recherche en Imagerie et Orthopédie (LIO), Centre de Recherche du CHUM, Montréal, Canada
Keywords: Dense Correspondence Map Computation, Computational Geometry, non-Rigid non-Isometric Deformation,
Cubic Mapping, Optical Flow.
Abstract: Establishing correspondences is a fundamental and essential task in computer graphics for further
processing of shapes. We have proposed an important modification to an existing method to remove several
large matching errors in specific regions. The method uses the unit sphere and the regular spherical grid as
parameterization spaces to perform registration and obtain the matching map between two three-
dimensional genus-zero shapes, considering non-rigid and non-isometric deformations. Although the unit
sphere is a suitable parameterization space for rigid alignment, mapping the sphere to a regular spherical
grid for non-rigid registration makes the process unstable since it is not a distance-preserving projection.
Therefore, it produces large detachments on the grid and for several regions. Replacing the regular spherical
grid mapping with Cubic mapping results in smooth displacement and locality for all corresponding vertices
on each cube face. Due to our enhancement, the Optical Flow faces a smooth flow field in the non-rigid
registration process. Our modification results in the elimination of matches with significant normalized
geodesic error and an increase in the accuracy of the correspondence map, compared to the base method and
other recently published approaches.
1 INTRODUCTION
Finding the correspondence map between two
meshes is an essential initializing task for further
processing of the shapes, such as building a
Statistical Shape Model (SSM), Shape
Reconstruction, Shape Analysis, etc. (Sahillioğlu,
2019). For building an SSM of the shape of interest,
correspondences should be established for all shapes
within the dataset (Cootes et al., 1995), and to have
an accurate SSM, we need to establish correct
correspondences (Davies et al., 2002). Thus,
matching errors on the correspondence map should
be removed or decreased. If the matched vertices do
not represent anatomically equivalent regions on
source and target shapes (e.g., matching the left foot
to the right foot in matching human shapes as
depicted in Figure 1a), the result of the SSM and its
variability will be exaggerated (Davies et al., 2002),
leading the application toward unexpected results.
The task becomes more complex as shapes go from
2D to 3D, and the transformation goes from rigid to
non-rigid and from isometric to non-isometric
(Sahillioğlu, 2019). In addition, it is a challenging
process since shapes’ local and global information
should be considered (Sahillioğlu, 2019). Since most
real shapes tend to have non-rigid and non-isometric
deformations, matching such shapes has become an
interesting and expanding topic in computer vision.
Multiple surveys represent recent advances in
establishing correspondences (Sahillioğlu, 2019; Li
et al., 2014; Tam et al., 2012). The author
(Sahillioğlu, 2019) has presented a classification of
recent methods based on the density of the
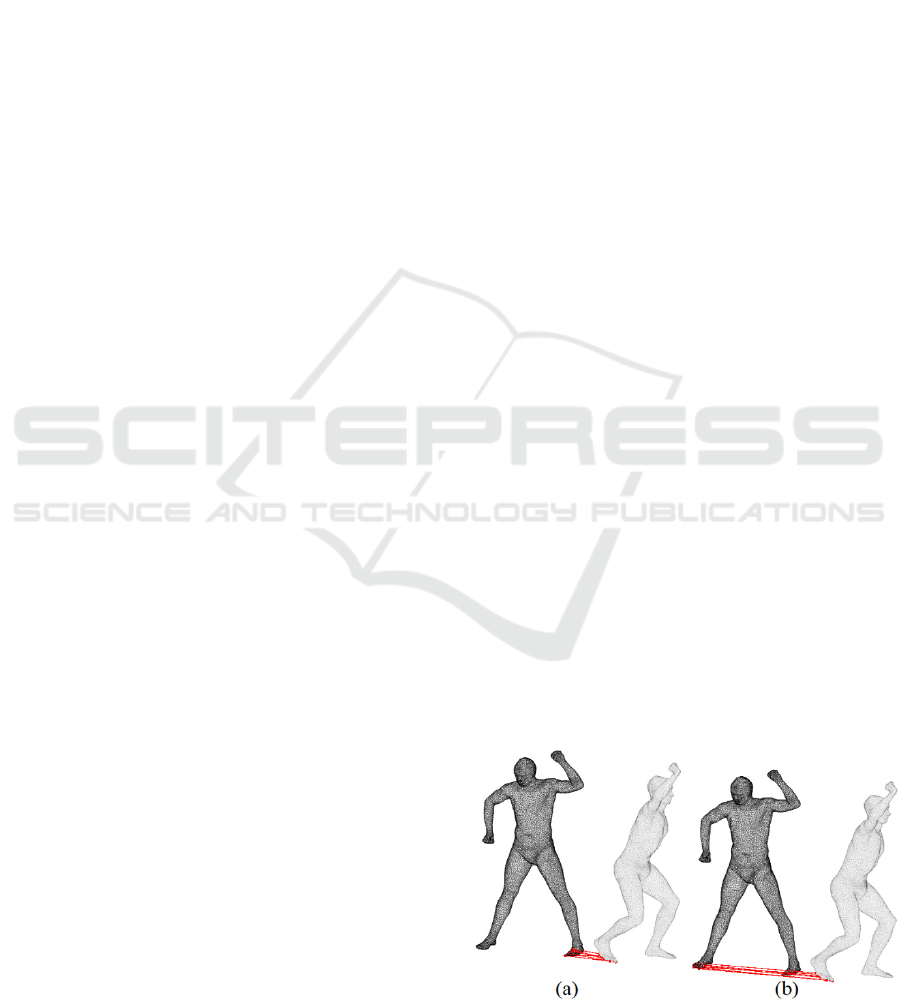
Figure 1: (a) Several erroneous matchings in a region by a
matching algorithm (Lee et al., 2019); (b) ground truth.
196
Hashemibakhtiar, P., Cresson, T., De Guise, J. and Vázquez, C.
Dense Point-to-Point Correspondences Between Genus-Zero Shapes Using Cubic Mapping and Horn-Schunck Optical Flow.
DOI: 10.5220/0011674900003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 1: GRAPP, pages
196-205
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

correspondences, deformation types, solution
approaches, etc. Regarding the solution approaches,
the first category is Similarity-based solutions
(Ovsjanikov et al., 2012; Nogneng et al., 2017; Ren
et al., 2018; Gehre et al., 2018; Melzi et al., 2018;
Hu et al., 2021; Vestner et al., 2017) in which
geometric invariants descriptors are computed and
matched. These sophisticated descriptors need to
handle different geometric aspects of the shapes,
e.g., rigid alignments, scaling, etc. The other
approaches are Registration-based methods
(Eisenberger et al., 2020; Eisenberger et al., 2019;
Cosmo et al., 2019; Dyke et al., 2019; Melzi et al.,
2019; Lee et al., 2019). These techniques register
shapes under a deformation field or project them
into a common intermediate domain and perform the
registration in the parameterization space. The
significant advantage of these approaches is that
they generate one-to-one, very dense, and
continuous correspondence maps (Huang et al.,
2020). Although parametrizing the shapes, results in
higher computational complexity than similarity-
based methods (Sahillioğlu, 2019), it can help tackle
some challenges in parametrization spaces.
Removing the scale of shapes by mapping them to
unit disks (Sahillioğlu, 2019), handling the rigid
registration easier by mapping shapes into spheres
(Lee et al., 2019), using intrinsic and extrinsic
information to handle local and global deformations
(Eisenberger et al., 2020) and matching the shapes
using functional maps (Melzi et al., 2018) are
examples of parameterization done in the literature.
(Eisenberger et al., 2020) use an intermediate
product space that includes shapes’ intrinsic and
extrinsic information and perform the registration
process fused with functional maps. Intrinsic
information is invariant to large-scale deformations,
and extrinsic features handle local topological
changes. So, rigid alignment is implicitly
considered. Although they have suggested that their
initial pose determination using Markov Chain
Monté Carlo provides reasonable estimation in many
cases, the results show that initialization still can go
wrong for large deformations, affecting the matching
results. (Eisenberger et al., 2019) utilize the
Karhunen-Loéve expansion to compute divergence-
free deformation fields. This property makes the
registration applicable to shapes with almost the
same volume, which is a drawback for a general
matching algorithm. (Cosmo et al., 2019) have used
the Laplacian spectrum to deform shapes. The
method works on shapes from different categories
(e.g., matching horses to camels) having the same
initial pose only. (Dyke et al., 2019) add anisotropic
deformations to a non-rigid registration process to
handle the non-isometric deformations accurately.
Although they handle large-scale deformations, the
initialization of the method is based on their local
feature descriptor, and poor initial matches mislead
the registration process entirely. In (Melzi et al.,
2019), iterative up-sampling is used in the spectral
domain to refine the functional map results. The
functional map initialization implicitly considers the
shapes’ initial pose. Unit spheres and regular
spherical grids are incorporated to match two genus-
zero shapes (Lee et al., 2019). Learning-based
approaches are also used for finding the
correspondences on shapes. However, they take
longer processing time in the training stage rather
than processing the shapes directly (Sahillioğlu,
2019) and need the availability of large datasets.
For building an SSM, it is critical that the
corresponding landmarks are sufficiently dense and
smoothly continuous (Munsell et al., 2008). As
stated, registration-based methods represent dense
and continuous correspondences on shapes (Huang
et al., 2020).
(Lee et al., 2019) have used the unit sphere as the
intermediate domain since it is a suitable
parameterization space for explicitly handling scale
and rigid transformation. In addition, significant
differences in the initial pose can be handled on the
unit sphere. Figure 2 elaborates steps of their
framework resulting in matching between two cat
shapes (Figure 2a). First, shapes are converted into
unit spheres (Figure 2b) using Conformalized Mean
Curvature Flow (CMCF) (Kazhdan et al., 2012).
Spheres are then processed by Authalic Evolution
(AE) (Zou et al., 2011) to make the area of the mesh
triangles as equal as possible (Figure 2c). Heat
Kernel Signature (HKS) (Sun et al., 2009) is
calculated on the shape domain and is pulled back to
the sphere (Figure 2d). It extracts features of the
shapes that are used in rigid and non-rigid
registration steps. Rotational alignment is applied
(Figure 2e) to align the spheres as much as possible
by maximizing the correlation on SO(3) (Baden et
al., 2018). Finally, for the non-rigid registration step,
the spheres are moved into an equirectangular
spherical grid (Figure 2f) with multiple resolutions,
simulating the hierarchy structure of the Optical
Flow process (Prada et al., 2016). After applying the
Optical Flow on hierarchical planar grids, the flow
field is pulled back into spheres, and vertices of the
source sphere are moved to their corresponding
coordinates on the target sphere accordingly (Figure
2g). Calculating a proximity metric on overlapped
spheres, e.g., Euclidean distance, generates the
Dense Point-to-Point Correspondences Between Genus-Zero Shapes Using Cubic Mapping and Horn-Schunck Optical Flow
197
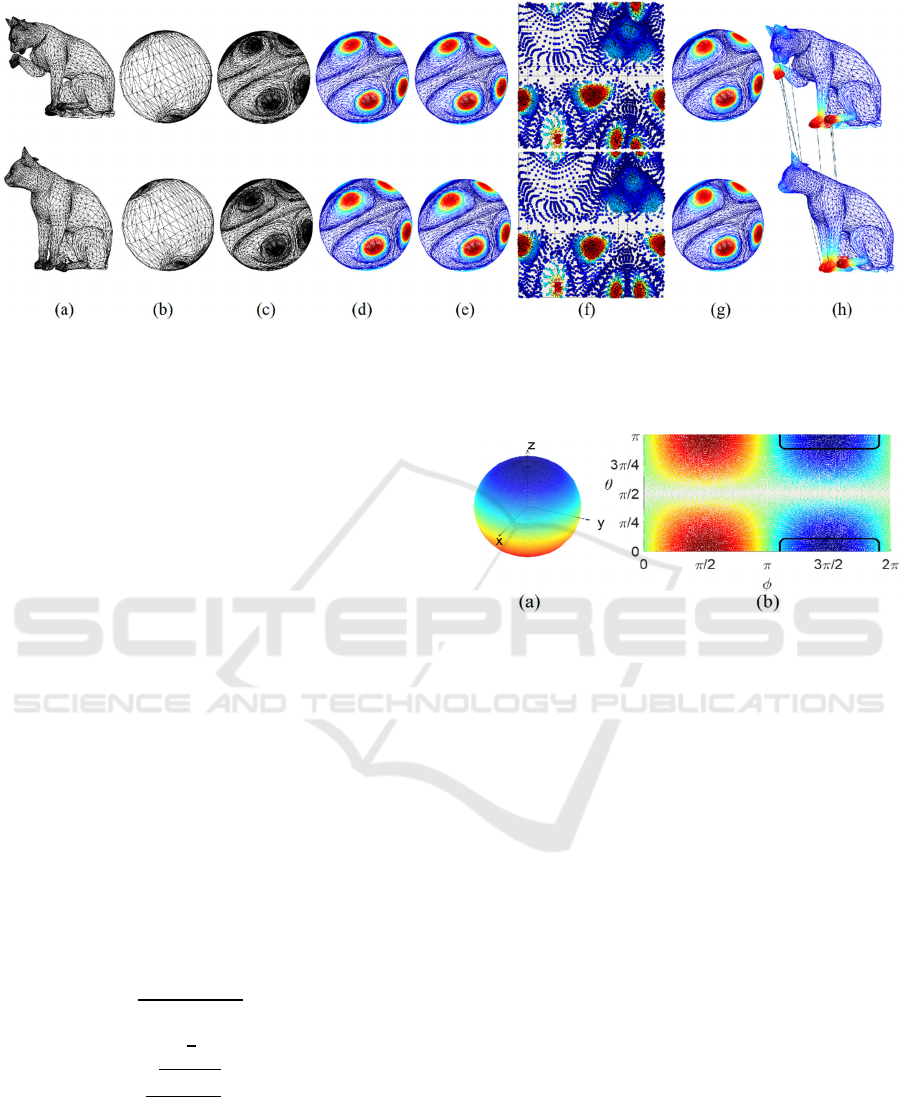
Figure 2: Illustration of (Lee et al., 2019) work. (a) Source (top) and target (bottom) cat shapes; (b) Shapes are moved into
the spherical domain; (c) AE method applied; (d) HKS is computed on the shape domain and pulled back on the spheres; (e)
Spheres are rotationally aligned; (f) Spheres are moved to a regular equirectangular spherical grid; (g) Non-rigid registration
is applied using Optical Flow on grids and spheres are advected; (h) Proximity measure reveals the matching of vertices.
forward and backward correspondence maps (Figure
2h). However, looking at the result of the method,
we can figure out that several erroneous matchings
are represented in some areas (e.g., Figure 1a),
which will be investigated in the next section.
2 PROBLEM STATEMENT
In (Lee et al., 2019), authors have stated that they
“rasterize the scale factors from the spherical
triangulation” (Figure 2e) “onto an equirectangular
N×N spherical grid” (Figure 2f) to perform Authalic
Evolution. They have used the same approach for
the Optical Flow process, stating that the
computation of the flow field is done “using regular
N×N spherical grids and rasterizing the signals”,
S
HKS
and T
HKS
,
the HKS signals defined on the
source and target shapes.
As defined in the standard ISO 31-11, the
parameterization from a sphere in cartesian space
(Figure 3a) to a regular spherical grid (Figure 3b) is
done by the following formulas.
ρ =
x
y
z
; ρ0
θ
=arctan
z
x
;0
θ
π
φ = arctan
√
x
z
y
;0φ2π
(1)
On a unit sphere, ρ is equal to 1. Thus, the
parameters θ and φ reconstruct the UV plane (Figure
3b). However, this parametrization is not distance-
preserving for vertices that have border values of θ
Figure 3: Illustration of parameterization from a unit
sphere (a) to a regular spherical grid (b). The mapping has
not preserved the distances as they are on the sphere. The
indicated region is an example of the issue.
(close to 0 or π) and φ (close to 0 or 2π), which we
will refer to as “border vertices”. Although these
vertices are located very close in the spherical
domain (e.g., dark blue regions on top of the sphere
in Figure 3a), they are far apart on the UV plane
(indicated dark blues regions on top and bottom of
the rectangular grid in Figure 3b). (Lee et al., 2019)
move two rigidly aligned spheres into spherical grids
(Figure 2e to 2f), and then, the Optical Flow will
register two grids (Figure 2h) in the planar domain.
As two spheres are rigidly registered, the
corresponding vertices are close in the spherical
domain, and some small and smooth movements
should match them. However, a slight shift of the
border vertices in the spherical domain can be
mapped to a significant shift on the UV grid. E.g., a
slight movement of vertices in the dark blue region
of Figure 3a can move the vertex from the upper
region indicated in Figure 3b to the bottom one.
With the Optical Flow operating on this planar
domain, it cannot recover these large shifts and will
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
198
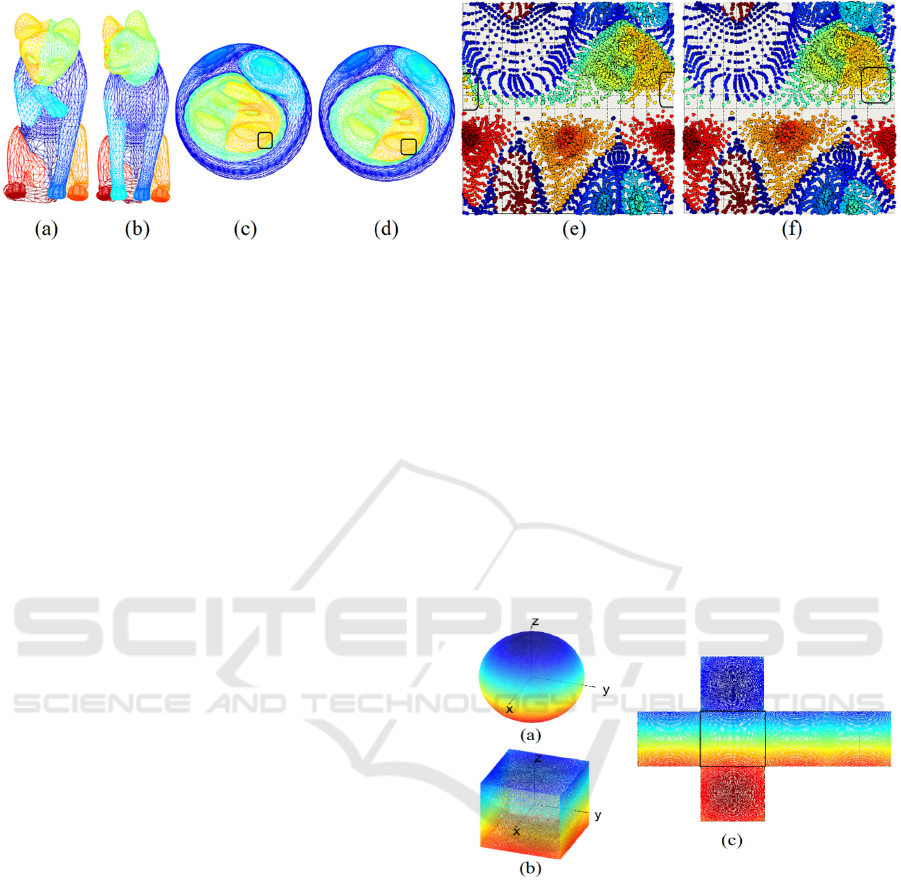
Figure 4: Illustration of discontinuity of neighbor regions on the spheres when they are projected to the spherical grid; (a)
Source shape; (b) Target shape; (c) Source sphere rigidly registered into target sphere. The region which will be split when
mapping into the spherical grid is indicated; (d) Target sphere. Corresponding region is indicated; (e) Spherical grid
representation of the source sphere indicating the region that is splitting into two regions, dissimilar to its correspondence
region in target grid representation; (f) Spherical grid representation of the target sphere, showing the corresponding region
to the indicated region in the source grid while it is a single connected area on the right side of the grid.
fail to match those corresponding vertices.
An illustration of this problem is represented in
Figure 4. Figure 4a is the source cat shape which
will be put in correspondence with the target cat
shape, represented in Figure 4b. The coloring
represents corresponding landmarks on both shapes.
Figures 4c and 4d show rigidly aligned spherical
representations of the two shapes and indicate the
regions containing some border vertices, which will
be investigated further on their planar representation.
The spherical grid parameterization of the shapes in
Figures 4e and 4f implies that although most of the
vertices in the indicated regions are in the same
location on the spherical grid, some vertices of one
of the cat’s ears are separated on the source planar
representation (as indicated in Figure 4e), while they
are all located on the right side of the plane in the
target planar representation (Figure 4f). Since
corresponding vertices are placed far from each
other in the planar domain, the Optical Flow cannot
find proper movement for matching these vertices.
3 METHODOLOGY
To solve the issue of border vertices, we propose
replacing the regular spherical mapping (steps in
Figure 2e and 2f) with cubic mapping (Greene,
1986). Figure 5a shows a unit sphere with smooth
coloring on its surface. Moving the sphere to a unit
cube (Figure 5b) and expanding it (Figure 5c) shows
that on each face, the distances and locality are
preserved (according to the fact that colors are not
distorted as we saw in Figure 3b for the regular
spherical grid).
To avoid the spherical grid mapping issue
(having large displacements) for some vertices on
the expanded version of the unit cube, we extended
each face of the cube properly while respecting the
adjacency of the faces and the locality of the vertices
on the cube. For applying the Optical Flow, we only
consider the central face (indicated in Figure 5c with
a black rectangle). By doing this for all six faces
separately, we can have a continuous, local, and
smooth flow field for all the vertices.
Figure 5: Replacing the regular spherical grid with cubic
mapping. (a) The unit sphere; (b) The unit cube made by
cubic mapping from the unit sphere; (c) cubic mapping
expanded. The expansion is done according to the central
indicated face and adjacent faces.
Figure 6 shows the expanded cube for the cat
shape represented in Figure 4a. The indicated region
in Figure 6 implies that the vertices of the cat’s ear
are all connected in the same region, while they have
been split in the previous parameterization (Figure
4e). This shows that the central face of the expanded
version of the cube keeps all adjacent vertices in a
single connected region.
The mentioned modification is explained in
detail in Algorithm 1, which will replace the
Dense Point-to-Point Correspondences Between Genus-Zero Shapes Using Cubic Mapping and Horn-Schunck Optical Flow
199
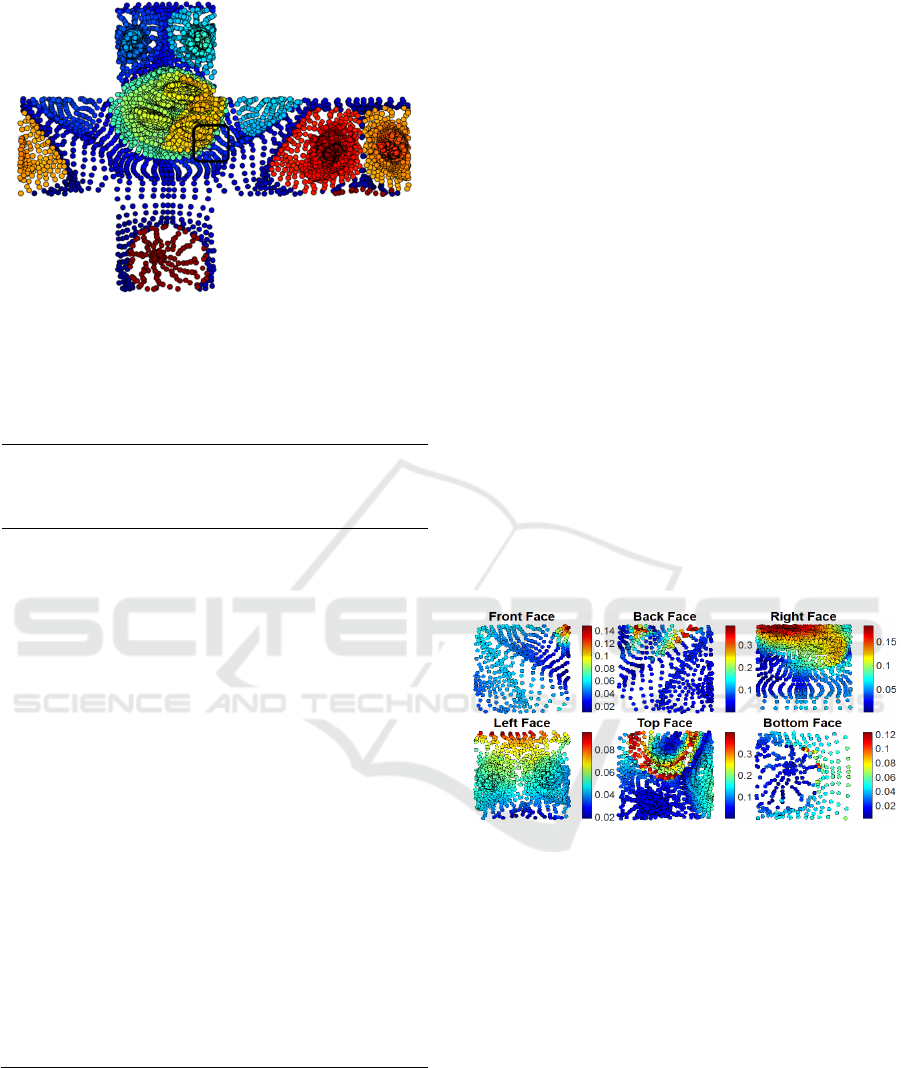
Figure 6: Cubic mapping expanded for cat shape
represented in Figure 4. The indicated part is the ear of the
cat, which is split into two regions in Figure 4e.
Algorithm 1: Proposed modification to (Lee et al., 2019)
by incorporating Cubic Mapping.
Input : Rotationally aligned Source and Targe
t
Spheres, S
Sphere
and T
Sphere
Output : Forward M
S→T
, and Backward M
T→S
Correspondence Maps
1 : For i=1:max
_
level
_
o
p
tical
_
flow
2 : res=level_resolutions(i)
3 : Compute cubes S
Cube
, T
Cube
from S
Sphere
,
T
Sphere
respectively. faces will be
generated according to
image_generation_resolution, S
HKS(i+1)
and T
HKS(i+1)
4 : For j=1 to 6{front, back, right, left, top,
b
ottom
}
5 : Extend S
Cube_face(j)
, T
Cube_face(j)
according to their adjacent faces and
generate S
image(j)
, T
image(j)
6 : Interpolate S
image(j)
, T
image(j)
using
gaussian filter to fill the holes on the
ima
g
es
7 : Reduce the image resolutions to res
8 : Apply Optical Flow on S
image(j)
,
T
image(j)
and keep the calculated flow
field for the face S
Cube_face(j)
9 : For j=1 to 6{front, back, right, left, top,
b
ottom
}
10 : Move the vertices falling on
S
Cube_face(j)
and update S
Sphere
accordingl
y
11 : Compute M
S→T
, and M
T→S
using the
p
roximit
y
non-rigid registration part in (Lee et al., 2019). After
aligning two spheres rigidly, the spheres are
transferred into unit cubes (Algorithm 1, line 3).
Each face will be appropriately extended with its
adjacent faces on the cube, and the Optical Flow is
applied to it (Algorithm 1, lines 4 to 8). Finally, the
computed flow field for all vertices is pulled back to
the source sphere and they are advected accordingly.
To prove that the locality is preserved for this
parametrization, we move two rigidly registered
spheres with known correspondences into unit cubes
(Algorithm 1, line 3) and then overlay the
corresponding faces of the cubes to compute the
Euclidean distances from each vertex on the source
cube face to its corresponding vertex on the target
cube face. Assuming that the corresponding vertices
are close on the overlaid spheres (since spheres have
been rigidly registered), corresponding vertices on
the source cube and target cube can be located on
the same face (e.g., both on front faces of cubes), or
adjacent faces (top, bottom, left and right faces for
the front face). Considering this adjacency, Figure 7
shows the Euclidean distances for vertices on the
source cube faces to their corresponding vertices on
the overlaid target cube faces. The cube is unit, and
the displacement of all vertices is less than half of
the side of each face. The distances can differ due to
the amount of deformation of the shapes.
We replaced the non-rigid registration process in
(Lee et al., 2019) with Algorithm 1. We will show
that our approach has resolved the mentioned issue
in (Lee et al., 2019) in multiple datasets and
according to multiple matching quality metrics.
Figure 7: Indicating Euclidean distance of the
corresponding vertices on the cube surfaces. The cube
faces are sized 1 by 1.
4 EXPERIMENTS AND RESULTS
Looking closely at the results of (Lee et al., 2019),
we figure out that the problem only occurs for some
border vertices. Depending on the amount of
deformation of the target shape with respect to the
source shape and rotational alignment of the spheres,
some of the border vertices might need large
displacements to meet the location of their
correspondences on the regular spherical grids.
Although there could be a small number of border
vertices having such a property, the wrong matching
of one vertex can also mislead the matching result
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
200
for its neighbors since the registration process is
done locally by Optical Flow.
To analyze the result of the proposed
modification, matching accuracy for the border
vertices will be considered only. We define border
vertices as follows. After moving a sphere into the
regular spherical grid, vertices that fall into 10% of
the margins from the borders of θ and φ parameters
are stated as border vertices. The 10% value is set
experimentally and will ensure that all the probable
erroneous matchings are happening for vertices in
this set. Eq. 2 shows this criterion.
0
θ
π
10
; π−
π
10
θ
π
0φ
2π
1
0
; 2π−
2π
1
0
φ2π
(2)
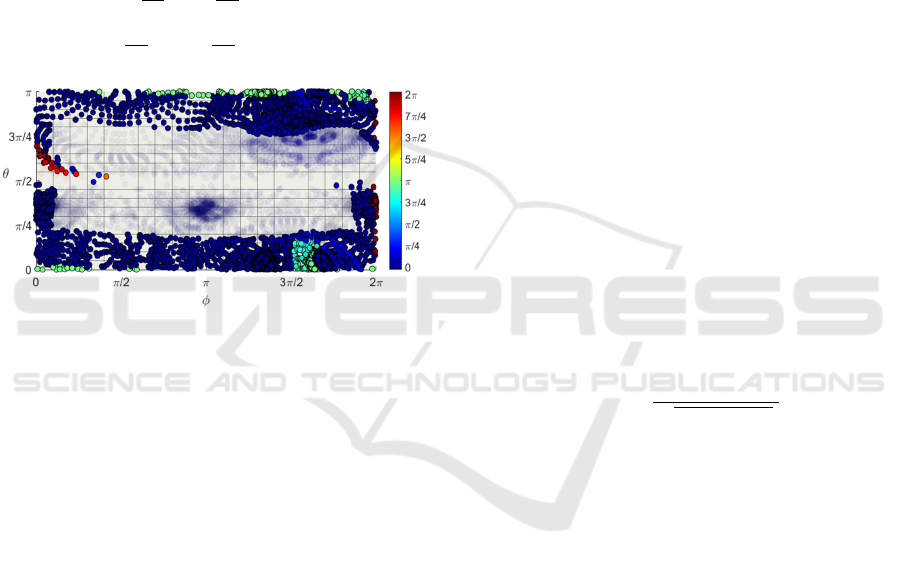
Figure 8: Indicating Euclidean distance for corresponding
vertices on the spherical grids. Non-border vertices are set
transparent. Large distances of some border vertices,
implying cases that cannot be matched with the Optical
Flow on this grid.
Figure 8 represents the Euclidean distance
between the vertices on the source spherical grid and
their corresponding vertices on the overlaid target
spherical grid for two shapes with known
correspondences. In the figure, border vertices
defined by Eq. 2 are shown as filled circles, while
non-border vertices are shown transparently.
According to the figure, although most of the border
vertices are very close to their corresponding
matches on the target grid (distances are close to 0),
some cases need to traverse to the other side of the
grid to be matched to their correspondences
(distances are close to π or 2π).
To demonstrate the effectiveness of the
modification applied to (Lee et al., 2019), we
considered comparing registration results from (Lee
et al., 2019) as ‘DenseP2PCorr’, the modified
version of the method by incorporating the cubic
mapping as ‘Ours’, ‘Zoom Out’ (Melzi et al., 2019)
and ‘Smooth Shells’ (Eisenberger et al., 2020) as
registration-based approaches. These methods result
in dense corresponding maps while handling rigid
alignment and obtaining the matching between
shapes with different poses. Three datasets are
considered in this experiment as they contain shapes
from the real world with non-rigid and non-isometric
deformations. TOSCA dataset (Bronstein et al.,
2008) consists of 80 models in 9 categories with
mesh resolutions ranging from 4K to 53K. Sumner
dataset (Sumner et al., 2004) consists of 76 non-
animative models in 8 categories with resolutions
ranging from 5K to 43K. The third database is
SCAPE (Anguelov et al., 2005), containing 72
models of human shape with a resolution of 12.5K
vertices. All shapes in all datasets are in
correspondence within each category and are
represented with the same topology, making them
suitable benchmarks for correspondence evaluation.
However, to reduce the time complexity of the
runtime, we considered a subset of the shapes for the
matching process. The number of combinations
within each category is represented in Table 1.
To evaluate the methods, we used Princeton
benchmark protocol and Correspondence Quality
Characteristics (CQC) curves (Kim et al., 2011).
Assume that a matching algorithm has matched
vertex x from source shape to vertex y in target
shape as (x,y). Having the ground truth of the match
as (x,y
), Normalized Geodesic Error (NGE) for
the match (x,y) is calculated by Eq. 3.
NGE(x,
y
)=
dist
(
y
,
y
)
Shape_Area
(3)
In Eq. 3., dist
(y,y
) is the geodesic distance
calculated on the target mesh between vertices y and
y
, and Shape_Area is the sum of the surface areas
for the target shape. For optimizing the computation
complexity, dist
(y,y
) is calculated and stored
for all combinations of y and y
on each shape and
for all participating shapes within each dataset.
Since the modification of the algorithm affects
the border vertices, NGE for these vertices is
considered and averaged as the results in Table 1.
In addition to the numerical analysis in Table 1,
visual comparisons of matching results of (Lee et al.,
2019) vs. ours are represented in Figures 9-11.
Figure 9a shows a cat shape on the left, while it
shows its spherical grid representation on the right.
The coloring represents the vertex indices on the
shape and the spherical grid. Considering the same
coloring on the shape and grid, border vertices inside
the yellow rectangle represent the region on the cat’s
Dense Point-to-Point Correspondences Between Genus-Zero Shapes Using Cubic Mapping and Horn-Schunck Optical Flow
201
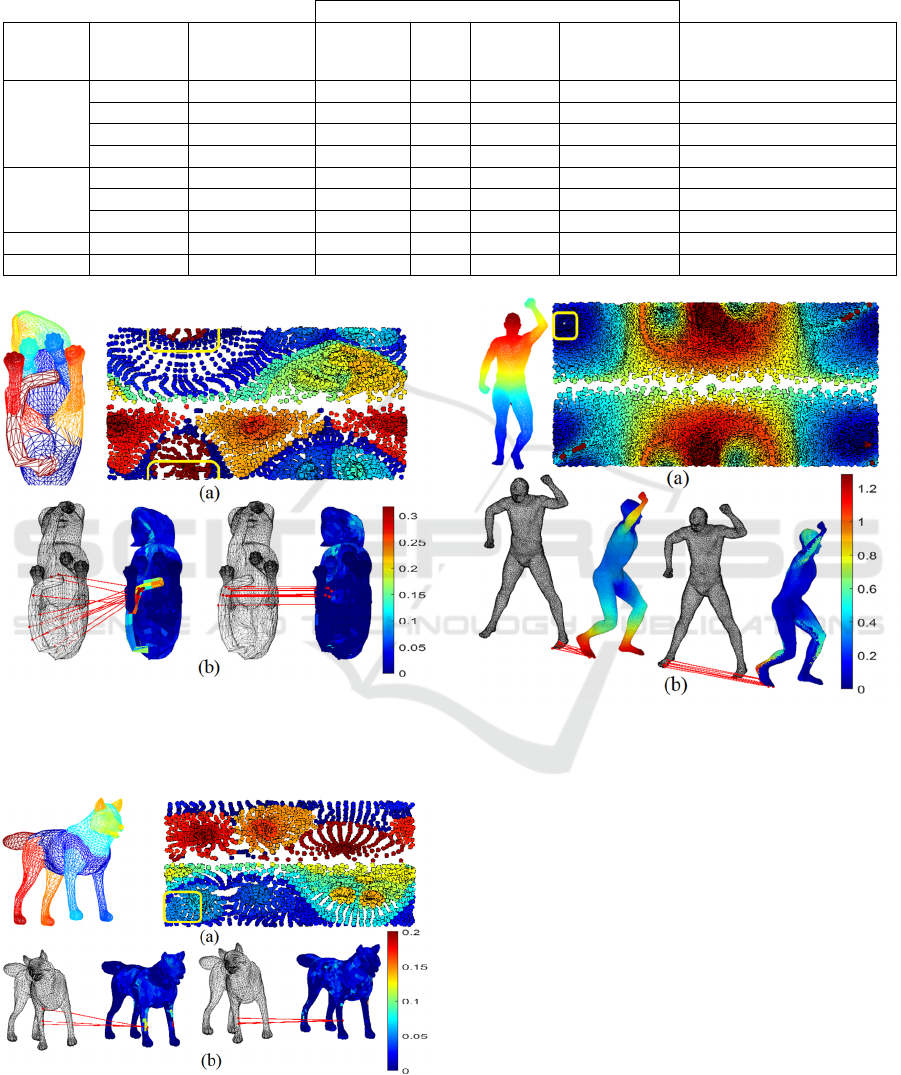
Table 1: Average Normalized Geodesic Error for border vertices and non-isometric deformation per category and in total
for all datasets.
Average NGE (×10
-3
)
Dataset/
Method
Shape
Category
Number of
Combinations
DenseP2
PCorr.
Ours
Smooth
Shells
Zoom Out NID average (×10-3)
TOSCA
Wolf 6 11.5 4.5 0.7 71.2 18.56
Centau
r
30 30.5 16.7 42.8 472 34.23
Horse 56 30.8 18.4 34.1 289.2 39.53
Total 142 30.3 17.6 35.9 338.2 37.59
Sumner
Lion 72 49.6 31.6 243.6 389 44.97
Cat 72 52.3 24.3 242.6 469.7 63.61
Total 144 51.4 26.8 242.9 441.8 55.98
SCAPE Human 110 107.2 25.9 62.2 80.6 39.4
Total Total 396 60.6 22.6 97.4 281.1 42.46
Figure 9: (a) Indicating some border vertices on the tail of
the cat; (b) Comparing the matching results from
DenseP2PCorr (left) vs. Ours (right) on two cat shapes in
the Sumner dataset.
Figure 10: Indicating some border vertices on the hand of
the wolf; (b) Comparing the matching results from
DenseP2PCorr (left) vs. Ours (right) on two wolf shapes in
the TOSCA dataset.
Figure 11: (a) Indicating some border vertices on the foot
of the human; (b) Comparing the matching results from
DenseP2PCorr (left) vs. Ours (right) on two human shapes
in the SCAPE dataset.
tail. Figure 9b shows the matching results by (Lee et
al., 2019) on the left and our approach on the right.
The coloring in Figure 9b represents the NGE of the
matching for all vertices in the shape domain. Figure
10 and Figure 11 show similar results for the
registration of two wolf shapes from the TOSCA
dataset and two human shapes from the SCAPE
dataset, respectively.
Furthermore, we have represented CQC curves
for all methods within each category in all datasets.
CQC curves (Kim et al., 2011) represent percentages
of correct matches that are tolerating distance r in
terms of NGE. Figure 12 shows all CQC curves for
each category within each dataset. In addition,
curves for all shapes within each dataset and all
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
202
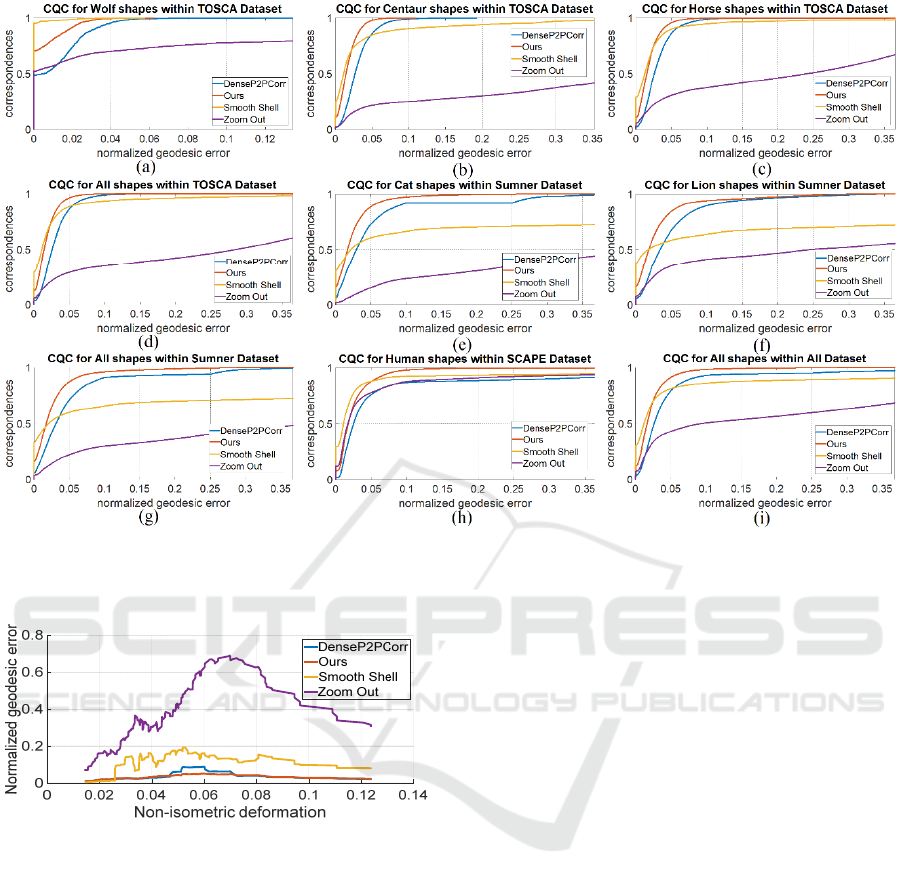
Figure 12: CQC curves for all datasets per category and in total. (a) Wolf shapes from TOSCA; (b) Centaur shapes from
TOSCA; (c) Horse shapes from TOSCA; (d) All shapes within TOSCA; (e) Cat shapes from Sumner; (f) Lion shapes from
Sumner; (g) All shapes within Sumner; (h) Human shapes from SCAPE; (i) All shaped within all datasets.
Figure 13: Normalized Geodesic Error (NGE) vs. non-
isometric deformation (NID) of shapes for all matching
results.
shapes within all datasets are also represented. The
border vertices on target spherical grids are
considered only for generation of CQC curves.
Finally, to demonstrate the amount of non-
isometric deformations of the shapes and how they
affect the result of different matching processes, we
define the Non-Isometric Deformation (NID) as
follows.
NID
(
x,
y
)
=NGE
(
x,
y
)
_
−NGE
(
x,
y
)
_
(4)
The source and target shapes are arbitrary shapes
within the same category (having the same
topology), and x and y are all vertices on each shape.
This metric is calculated for all combinations of the
shapes participating in the matching experiment. The
values are averaged within each category and
represented in Table 1.
Taking the NID into account, we have
demonstrated the amount of NGE for the matching
result with respect to the NID of the matching
shapes for all four competing methods in Figure 13.
5 DISCUSSION AND
CONCLUSION
As stated in Table 1, almost 400 registration
processes are done to demonstrate the comparison of
the accuracy of corresponding maps generated by
four different methods in three different datasets
with different characteristics. Among all the
categories, the Wolf category from the TOSCA
dataset is the easiest matching case since shapes are
not deformed very much (as an example is
represented in Figure 10b), and the density of the
shapes is the lowest (approximately 4K vertices). In
addition, the initial states of the shapes are very
similar. On the contrary, the human shapes in the
Dense Point-to-Point Correspondences Between Genus-Zero Shapes Using Cubic Mapping and Horn-Schunck Optical Flow
203

SCAPE dataset have a broad range of initial poses
and deformations. As shown in Table 1, our
approach has reduced the NGE for border vertices,
making the matching results more accurate than
those from (Lee et al., 2019) among all categories. It
also represents better results compared to the other
two methods when the shapes’ NID increases. The
information on NID demonstrates the effect of the
nature of the shapes on the result of registration
processes. As can be seen, the shapes in the Wolf
category from TOSCA, which have the least NID
values, are best matched with the Smooth Shell
(Eisenberger et al., 2020) among the competitors.
Zoom Out (Melzi et al., 2019) is always resulting
less accurate matching than the others.
Visual comparisons in Figures 9-11 demonstrate
the erroneous matching result for some of the border
vertices in the result of (Lee et al., 2019) vs. Ours.
Figure 9a implies the same coloring for the cat shape
and the parameterized vertices on the spherical grid.
The vertices indicated in crimson color on the grid
show cat’s tail, as can be seen on the cat shape with
the identical coloring. It is depicted in Figure 9b that
these border vertices represent significant matching
errors, and they are chaotically matched from the
source shape to multiple regions on the target shape
by (Lee et al., 2019) (left). This behavior is removed
in the result of our proposed method (right). In
addition, we can see that only some border vertices
show significant errors, and almost all non-border
vertices are matched to their correct
correspondences correctly. Similar behavior is
shown for the Wolf shapes in Figure 10 and Human
shapes in Figure 11.
Figure 12 represents CQC curves for all shapes
within each category and dataset. As shown in
Figure 12a, the Smooth Shell (Eisenberger et al.,
2020) outperforms the others only when shapes are
not deforming non-isometrically very much (wolf
category of the TOSCA dataset). In addition, the
amount of improvement to the matching accuracy
among border vertices is related to the amount of
non-rigid deformation represented in the shapes and
the number of border vertices that are dislocated
with large distances on the spherical grid in the
approach represented by (Lee et al., 2019).
Considering the mentioned criteria, Figure 12b-12h
shows that our modification improved the accuracy
compared with (Lee et al., 2019) for all categories
and within all datasets. Figure 12i shows the results
of the comparison in all registration processes.
According to Figure 13, the more non-isometric
deformation a target shape (concerning the source
shape) has, the more challenging the registration
process is to match corresponding vertices. As stated
in the figure, the Smooth Shell method (Eisenberger
et al., 2020) can represent the best result of matching
for the shapes having small values of NID (e.g.,
Wolf category of the TOSCA dataset). However,
with increasing the NID of the registering shapes,
the Smooth Shell’s NGE increases compared to Ours
and DenseP2PCorr. The fluctuations in the graph
imply that the correspondence quality is not only
affected by the NID of shapes but also by other
factors, such as the initialization state of the shapes,
rigid alignment, etc.
As discussed in the paper, we have represented
an essential modification to the non-rigid
registration part of the method represented by (Lee
et al., 2019) to fix an important issue. We suggested
replacing the regular spherical grid with cubic
mapping, which preserves distances the same as
represented on the sphere. Applying Optical Flow on
each cube face individually (while having them
extended properly based on adjacent faces)
preserves the flow field smooth and local for all the
vertices. Also, there would be no continuity issue in
the deformation fields. Thus, the Optical Flow can
calculate all the proper movements to register the
shapes.
We have shown that our proposition is superior
to (Lee et al., 2019) and other recently published
methods in terms of correspondence accuracy. The
results by (Lee et al., 2019) for some border vertices
are chaotically matched to multiple regions. This is a
critical issue, especially for applications such as
building SSM.
Although this work has resolved some
limitations of the previous work, it still suffers from
the inability to register non-genus-zero shapes. The
source of this issue is the CMCF which cannot
converge the evolution of such shapes toward the
unit sphere. Furthermore, the unit sphere and unit
cube are not suitable parameterization spaces to
represent non-genus-zero shapes. It can be further
investigated in future works.
REFERENCES
Anguelov, D., Srinivasan, P., Koller, D., Thrun, S.,
Rodgers, J., & Davis, J. (2005). Scape: shape
completion and animation of people. In ACM
SIGGRAPH 2005 Papers (pp. 408-416).
Baden, A., Crane, K., & Kazhdan, M. (2018, August).
Möbius registration. In Computer Graphics Forum
(Vol. 37, No. 5, pp. 211-220).
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
204

Bronstein, A. M., Bronstein, M. M., & Kimmel, R. (2008).
Numerical geometry of non-rigid shapes. Springer
Science & Business Media.
Cootes, T. F., Taylor, C. J., Cooper, D. H., & Graham, J.
(1995). Active shape models-their training and
application. Computer vision and image understanding,
61(1), 38-59.
Cosmo, L., Panine, M., Rampini, A., Ovsjanikov, M.,
Bronstein, M. M., & Rodolà, E. (2019).
Isospectralization, or how to hear shape, style, and
correspondence. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern
Recognition (pp. 7529-7538).
Davies, R. H., Twining, C. J., Cootes, T. F., Waterton, J.
C., & Taylor, C. J. (2002). A minimum description
length approach to statistical shape modeling. IEEE
transactions on medical imaging, 21(5), 525-537.
Dyke, R. M., Lai, Y. K., Rosin, P. L., & Tam, G. K.
(2019). Non-rigid registration under anisotropic
deformations. Computer Aided Geometric Design, 71,
142-156.
Eisenberger, M., Lahner, Z., & Cremers, D. (2020).
Smooth shells: Multi-scale shape registration with
functional maps. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern
Recognition (pp. 12265-12274).
Eisenberger, M., Lähner, Z., & Cremers, D. (2019,
August). Divergence‐Free Shape Correspondence by
Deformation. In Computer Graphics Forum (Vol. 38,
No. 5, pp. 1-12).
Gehre, A., Bronstein, M., Kobbelt, L., & Solomon, J.
(2018, August). Interactive curve constrained
functional maps. In Computer Graphics Forum (Vol.
37, No. 5, pp. 1-12).
Greene, N. (1986). Environment mapping and other
applications of world projections. IEEE computer
graphics and Applications, 6(11), 21-29.
Hu, L., Li, Q., Liu, S., & Liu, X. (2021). Efficient
deformable shape correspondence via multiscale
spectral manifold wavelets preservation. In
Proceedings of the IEEE/CVF Conference on
Computer Vision and Pattern Recognition (pp. 14536-
14545).
Huang, X., Yang, H., Vouga, E., & Huang, Q. (2020).
Dense correspondences between human bodies via
learning transformation synchronization on graphs.
Advances in Neural Information Processing Systems,
33, 17489-17501.
Kazhdan, M., Solomon, J., & Ben ‐ Chen, M. (2012,
August). Can mean‐curvature flow be modified to be
non‐singular?. In Computer Graphics Forum (Vol.
31, No. 5, pp. 1745-1754). Oxford, UK: Blackwell
Publishing Ltd.
Kim, V. G., Lipman, Y., & Funkhouser, T. (2011).
Blended intrinsic maps. ACM transactions on graphics
(TOG), 30(4), 1-12.
Lee, S. C., & Kazhdan, M. (2019, August). Dense Point‐
to ‐ Point Correspondences Between Genus ‐ Zero
Shapes. In Computer Graphics Forum (Vol. 38, No. 5,
pp. 27-37).
Li, X., & Iyengar, S. S. (2014). On computing mapping of
3d objects: A survey. ACM Computing Surveys
(CSUR), 47(2), 1-45.
Melzi, S., Ovsjanikov, M., Roffo, G., Cristani, M., &
Castellani, U. (2018). Discrete time evolution process
descriptor for shape analysis and matching. ACM
Transactions on Graphics (TOG), 37(1), 1-18
Melzi, S., Ren, J., Rodola, E., Sharma, A., Wonka, P., &
Ovsjanikov, M. (2019). Zoomout: Spectral
upsampling for efficient shape correspondence. arXiv
preprint arXiv:1904.07865.
Munsell, B. C., Dalal, P., & Wang, S. (2008). Evaluating
shape correspondence for statistical shape analysis: A
benchmark study. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 30(11), 2023-2039.
Nogneng, D., & Ovsjanikov, M. (2017, May). Informative
descriptor preservation via commutativity for shape
matching. In Computer Graphics Forum (Vol. 36, No.
2, pp. 259-267).
Ovsjanikov, M., Ben-Chen, M., Solomon, J., Butscher, A.,
& Guibas, L. (2012). Functional maps: a flexible
representation of maps between shapes. ACM
Transactions on Graphics (ToG), 31(4), 1-11.
Prada, F., Kazhdan, M., Chuang, M., Collet, A., & Hoppe,
H. (2016). Motion graphs for unstructured textured
meshes. ACM Transactions on Graphics (TOG), 35(4),
1-14.
Ren, J., Poulenard, A., Wonka, P., & Ovsjanikov, M.
(2018). Continuous and orientation-preserving
correspondences via functional maps. ACM
Transactions on Graphics (ToG), 37(6), 1-16.
Sahillioğlu, Y. (2019). Recent advances in shape
correspondence. The Visual Computer, 36(8), 1705–
1721.
Sumner, R. W., & Popović, J. (2004). Deformation
transfer for triangle meshes. ACM Transactions on
graphics (TOG), 23(3), 399-405.
Sun, J., Ovsjanikov, M., & Guibas, L. (2009, July). A
concise and provably informative multi ‐ scale
signature based on heat diffusion. In Computer
graphics forum (Vol. 28, No. 5, pp. 1383-1392).
Oxford, UK: Blackwell Publishing Ltd.
Tam, G. K., Cheng, Z. Q., Lai, Y. K., Langbein, F. C., Liu,
Y., Marshall, D., ... & Rosin, P. L. (2012).
Registration of 3D point clouds and meshes: A survey
from rigid to non-rigid. IEEE transactions on
visualization and computer graphics, 19(7), 1199-1217.
Vestner, M., Litman, R., Rodola, E., Bronstein, A., &
Cremers, D. (2017). Product manifold filter: Non-rigid
shape correspondence via kernel density estimation in
the product space. In Proceedings of the IEEE
Conference on Computer Vision and Pattern
Recognition (pp. 3327-3336).
Zou, G., Hu, J., Gu, X., & Hua, J. (2011). Authalic
parameterization of general surfaces using Lie
advection. IEEE Transactions on Visualization and
Computer Graphics, 17(12), 2005-2014.
Dense Point-to-Point Correspondences Between Genus-Zero Shapes Using Cubic Mapping and Horn-Schunck Optical Flow
205
