
Deep Minutiae Fingerprint Extraction Using Equivariance Priors
Margarida Gouveia
1,2 a
, Eduardo Castro
1,2 b
, Ana Rebelo
1 c
, Jaime S. Cardoso
1,2 d
and Bruno Patr
˜
ao
3,4 e
1
Instituto de Engenharia de Sistemas e Computadores, Tecnologia e Ci
ˆ
encia, Porto, Portugal
2
Faculdade de Engenharia, Universidade do Porto, Porto, Portugal
3
Imprensa Nacional-Casa da Moeda, Lisbon, Portugal
4
Department of Electrical and Computer Engineering, University of Coimbra, Coimbra, Portugal
Keywords:
Biometrics, Convolution Neural Network, Equivariance, Fingerprints, Group Convolutional Network,
Minutiae, Multi-Task Learning, U-Net.
Abstract:
Currently, fingerprints are one of the most explored characteristics in biometric systems. These systems typi-
cally rely on minutiae extraction, a task highly dependent on image quality, orientation, and size of the finger-
print images. In this paper, a U-Net model capable of performing minutiae extraction is proposed (position,
angle, and type). Based on this model, we explore two different ways of regularizing the model based on
equivariance priors. First, we adapt the model architecture so that it becomes equivariant to rotations. Second,
we use a multi-task learning approach in order to extract a more comprehensive set of information from the
fingerprints (binary images, segmentation, frequencies, and orientation maps). The two approaches improved
accuracy and generalization capability in comparison with the baseline model. On the 16 test datasets of the
Fingerprint Verification Competition, we obtained an average Equal-Error Rate (EER) of 2.26, which was
better than a well-optimized commercial product.
1 INTRODUCTION
A fingerprint is an impression formed by the con-
tact of the friction ridges on the fingertips with a
surface (Adiga V and Sivaswamy, 2019). Friction
ridges are described as “three-dimensional surfaces
with irregular structures separated by narrow fur-
rows valleys” (Hicklin, 2009). A detailed and dis-
tinct pattern of ridges and valleys exists for each hu-
man, which cannot be changed during the individual’s
life (Adiga V and Sivaswamy, 2019). These charac-
teristics explain why fingerprints are useful as a pri-
mary biometric modality in our daily lives (Adiga V
and Sivaswamy, 2019; Peralta et al., 2015; Joshi et al.,
2019).
Experts can recognize fingerprints by comparing
two fingerprint images and matching the structures
present in them. One of the most important steps
a
https://orcid.org/0000-0002-0268-7921
b
https://orcid.org/0000-0003-4144-695X
c
https://orcid.org/0000-0003-4776-6057
d
https://orcid.org/0000-0002-3760-2473
e
https://orcid.org/0000-0002-0251-9047
is minutiae extraction, in which friction ridge skin
features are detected. The combination of these fea-
tures results in different minutiae types in different
positions and orientations, which are unique to each
individual (Hicklin, 2009). Minutiae extraction is
influenced by conditions such as humidity or skin
dryness, the presence of dirt, or the existence of
wounds (Adiga V and Sivaswamy, 2019). Also, the
variety of sensors available to capture fingerprints re-
sults in images with different characteristics (Adiga V
and Sivaswamy, 2019). As a result, fingerprint images
may have different levels of noise, orientations, and
scale. To address this variability, various deep learn-
ing methods, such as Convolutional Neural Networks
(CNNs), have been tested, for minutiae extraction and
pre-processing or matching fingerprints.
Minutiae can be extracted using deep learning
methods that learn feature representations directly
from data (Rebelo et al., 2019; Tang et al., 2017). The
result is a probability map of minutiae positions, that
needs to be post-processed to precise positions and
orientations of minutiae (Rebelo et al., 2019). These
methods have shown promise in tackling fingerprint
image complexity, especially artefacts. Despite this,
Gouveia, M., Castro, E., Rebelo, A., Cardoso, J. and Patrão, B.
Deep Minutiae Fingerprint Extraction Using Equivariance Priors.
DOI: 10.5220/0011673500003414
In Proceedings of the 16th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2023) - Volume 4: BIOSIGNALS, pages 241-251
ISBN: 978-989-758-631-6; ISSN: 2184-4305
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
241

the use of CNNs for minutiae extraction is restricted
by the scarcity of real fingerprint datasets with ade-
quate minutiae marking, as well as privacy concerns.
Alternatively, synthetic fingerprint generators capable
of creating large databases that mimic inter-class and
intra-class variations can be used. Although helpful,
mimicking the natural degradation that occurs in natu-
rally enrolled fingerprints or naturally acquired latent
fingerprints is difficult. This emphasizes the impor-
tance of developing models with strong generalization
capabilities, even when trained with small amounts of
data. The field of Geometric Deep Learning proposes
the use of equivariant CNNs to obtain networks robust
to input transformations, and with a greater capacity
for generalization to unseen data. The equivariance
priors used are motivated by prior knowledge of the
data and task at hand. In the case of fingerprint im-
ages, due to the importance of minutiae orientation,
rotation-equivariant CNNs are worth investigating.
The aim of this paper is to investigate how a CNN
model can be used to extract minutiae (position, an-
gle, and type) from various types of fingerprint im-
ages. Specifically, how the model optimization can
be regularized by incorporating rotation equivariance
properties into the model architecture, and how the
use of additional ground-truth information can impact
network performance in the main task of minutiae ex-
traction for fingerprint images from various sources.
The main contributions of our paper are the follow-
ing:
• We propose a deep learning approach for minu-
tiae extraction trained on synthetic data but with
excellent performance in real fingerprint images.
• We demonstrate how regularization with addi-
tional ground-truth information results in a better
performance in the minutiae extraction task and
allows also the recovery of extra fingerprint infor-
mation.
• We demonstrate how equivariance priors can be
incorporated into the model architecture and train-
ing to improve generalization.
2 RELATED WORK
2.1 CNNs for Minutiae Extraction
Deep learning for minutiae extraction can take two
forms: building a neural network from scratch or
combining domain knowledge with neural networks
to improve structure design (Rebelo et al., 2019).
The FingerNet (Tang et al., 2017) and the Minuti-
aeNet (Nguyen et al., 2017) are two of those exam-
ples where domain knowledge is combined with deep
learning.
As a rule, the methods first generate a proposal
for the minutiae points and then extract the exact po-
sition, orientation, or type of minutiae (Jiang et al.,
2016; Tang et al., 2017; Zhou et al., 2020; Jiang
and Liu, 2017). Other methods consider the minu-
tiae extraction problem to be a segmentation task
where a U-Net model encodes the minutiae positions
using a binary mask (Pinetz et al., 2017) or the
positions and orientations using a mask with multi-
ple classes, according to the angle intervals (Nguyen
et al., 2020). In addition to minutiae information,
multi-task learning and transfer learning can be used
to extract frequency and texture information (Taka-
hashi et al., 2020; Zhang et al., 2021).
In our proposal, the minutiae information (posi-
tion, angle, and type) is encoded in different target
masks, with the U-Net model being trained in a multi-
task approach. The model’s outputs are then post-
processed to produce the typical minutiae template.
Our work is most similar to the approaches based on
the use of the U-Net (Pinetz et al., 2017; Nguyen
et al., 2020). We encode the minutiae positions and
orientations in different masks and obtain also the
minutiae type. Our work differs from the state-of-the-
art since we only use synthetic data in the training in-
stead of real fingerprints (Tang et al., 2017) to obtain
a larger training set. In addition, our proposed models
were tested in diverse datasets to test the generaliza-
tion capability of the models.
2.2 Equivariant CNNs
A CNN is equivariant when a specific transformation
in the network’s input results in a predictable change
in network output.
For instance, traditional CNNs are translation
equivariant: shifting the input of a layer yields the
same feature map as feeding the original image (with-
out shifting) to that layer and shifting the feature map.
This results from the weight sharing and local con-
nectivity properties of these models, which are con-
tributing factors to the high performance when pro-
cessing natural images (Castro et al., 2020). A CNN
can be classified as translation equivariant when fea-
ture extraction is identical regardless of the image re-
gion being processed (Castro et al., 2020; Cohen and
Welling, 2016). The importance of equivariance to
translations in traditional CNNs motivates the study
of additional types of equivariances that could be used
to enhance the accuracy of these models in other com-
puter vision tasks. In other words, the application of
symmetries was a fundamental design principle for
BIOSIGNALS 2023 - 16th International Conference on Bio-inspired Systems and Signal Processing
242

network architectures and can result in more precise
models (Gerken et al., 2021). For the specific case of
minutia extraction, fingerprint image characteristics
motivate the search for rotation-equivariant CNNs.
The most common way to address scale and ro-
tation equivariance in CNNs is to use data augmen-
tation, which involves rotating the data or changing
the scale (Castro et al., 2020; Naderi et al., 2020;
Worrall et al., 2017). This method ensures the ca-
pability of generalization of CNNs but does not en-
sure equivariance at all network layers (Worrall et al.,
2017). Data augmentation results in a heavy training
cost and complex model parameters, which may re-
duce network performance (Naderi et al., 2020). In
this way, several methods have been proposed to in-
corporate geometric transformation information into
network architectures.
One approach is to use four operations (slice,
pool, roll, and stack) to allow parameter sharing be-
tween different orientations via feature map rota-
tions to obtain equivariance to rotations (Dieleman
et al., 2016). The same property is obtained in the
Deep Rotation Equivariant Networks (DRENs) by re-
placing the rotations of the features maps with rota-
tions of the filters (Li et al., 2018). Another pro-
posal is the Group Equivariant Convolutional Neu-
ral Networks (G-CNNs), which allows the rotation
equivariance by defining the operation G-convolution
(Group-equivariant convolution) (Cohen and Welling,
2016). This operation exploits the known symmetries
of the data and is responsible for the generalization of
the common convolution operator to deal with rota-
tions and reflections. The limitation presented in this
method is the capability of dealing only with discrete
groups, and only rotations of multiple of 90°are con-
sidered. The Harmonic Networks (H-Nets) general-
ize the rotation equivariance for continuous groups of
360°rotations by replacing regular CNN filters with
circular harmonics (Worrall et al., 2017). This prop-
erty is the result of the replacement of regular CNN
filters with circular harmonics that return a maxi-
mal response and orientation. Circular harmonics are
steerable filters as the ones used to obtain scale equiv-
ariance in the Scale Equivariant Convolutional Neu-
ral Networks (SE-CNNs) (Naderi et al., 2020). The
Group Equivariant Capsule Networks also achieve ro-
tation equivariance by using group equivariant cap-
sule layers (Lenssen et al., 2018).
The aforementioned proposals use diverse tech-
niques to address the problem of scale and/or rota-
tion equivariance, and all demonstrated superior per-
formance in classification tasks compared to baseline
models. This indicates that the integration of scale
and/or rotation equivariance priors should be consid-
ered when designing different networking architec-
tures. The purpose of introducing these equivariances
was to improve the robustness and generalization of
the networks to unseen data. In this paper, the rotation
equivariance was embedded using G-convolutions to
replace the conventional convolutions of the U-net
model and obtain a Group Equivariant U-Net that can
be used for minutiae extraction.
3 METHODS
3.1 U-Net Architecture
To allow an image-to-image mapping between a fin-
gerprint image and a map with the same dimensions
of the minutiae positions, a U-Net model was em-
ployed (Ronneberger et al., 2015). It consists of an
encoder-decoder structure that uses as the main block
(ConvBlock) a sequence of a 3 by 3 Convolutional
layer (3x3 Conv), a Batch Normalization layer (BN)
and a Rectified Linear Unit (ReLU) as the activation
function. The Encoding Layer consists of four repe-
titions of two blocks ConvBlocks followed by a max-
pooling operation of stride 2. The Decoder consists
of four repetitions of two ConvBlocks followed by an
up-sampling operation with stride 2. The final out-
put is obtained by a 1 by 1 Convolutional layer. An-
other important detail is the use of skip connections,
which provide the decoder with information typically
lost during down-sampling. These consist of concate-
nating the feature maps after up-sampling in the de-
coder with feature maps before down-sampling in the
encoder.
3.2 Multi-Task Learning
We modify the U-Net model to perform multiple tasks
concurrently via a hard parameter-sharing strategy,
i.e., different tasks share hidden layers and have dis-
tinct output layers (Ruder, 2017). Through the use of
these share representations, the model focuses on the
most crucial aspects. The optimization of the multi-
task model is performed using a linear combination
of multiple loss functions for each task, following the
general equation presented in Equation 1. L
total
cor-
responds to the total value of the loss function with
N partial losses, L
i
corresponds to the value of each
partial loss, and λ
i
to the respective weight.
L
total
=
N
∑
i=1
(λ
i
· L
i
) (1)
Deep Minutiae Fingerprint Extraction Using Equivariance Priors
243

3.3 Baseline Model
The baseline model was designed to extract only in-
formation regarding the minutiae: position (x
0
, y
0
),
angle (θ
0
) and type (type 1 for a termination point or
type 2 for a bifurcation). The model uses the above-
mentioned U-Net architecture with four output chan-
nels that encode the minutiae information.
The spatial information of each minutia is en-
coded using a 2D Gaussian centered on the minutia’s
position. Two channels were used for encoding, one
for endpoints (Mask XY 1) and one for bifurcations
(Mask XY 2). A 21 × 21 Gaussian window, with a
standard deviation of 2 was used and normalized so
that the maximum value is 1. These two channels
can be seen as probability maps where the maximum
probability of 1, corresponds to the exact position of
the minutiae. For this reason, the sigmoid was used
as the output activation function.
For encoding the angle of each minutia, two more
channels were used. A box centered in each minu-
tia with the values of the sine (Mask A Sen) and the
cosine (Mask A Cos) encode the minutia angle. Us-
ing the trigonometric functions ensures there are no
discontinuities. For instance, when the model’s pre-
diction is 360°and the actual value of the angle is 0°,
the difference would be high even though the model
is accurate. Due to the range of these trigonometric
functions ([-1, 1]) the Hyperbolic Tangent (Tanh) was
used as the output activation function.
The loss function (L
minutiae
) for the baseline model
is presented in Equation 2, and consists of a sum of
four partial losses. The first two relate to the minu-
tiae position encoding and the two relate to orienta-
tion encoding were based on the Mean-Squared Error
(MSE). Notice that for the angle encoding losses, a
mask is used to ensure only regions around minutiae
(21 × 21 boxes) contribute to the loss since other re-
gions do not have a defined minutiae orientation. The
same weight is attributed to each partial loss. The
combination of the partial loss functions used for each
output channel of the model, the respective activation
function, and the range of output values are presented
in Table 1.
L
minutiae
= MSE
XY 1
+ MSE
XY 2
+ MSE
A Sen
+MSE
A Cos
(2)
3.4 Regularization with Additional
Ground-Truth Information
Five additional output channels were added to the
baseline model to act as model regularization. These
outputs are used to learn additional tasks, such as
the position, orientation, and frequency of the ridge
patterns, as well as a binary segmentation of the fin-
gerprint. These are not required for minutiae extrac-
tion but serve as a regularization of the learning pro-
cess. The proposed loss based on these extra chan-
nels (L
extra
) is combined with the loss of the main task
of minutiae extraction (L
minutiae
), using the parameter
λ
total
to weight the sum (Equation 3). The parameter
λ
total
was tuned to provide the best performance in the
task of minutiae extraction.
L
total
= λ
total
· L
minutiae
+ (1 − λ
total
) · L
extra
(3)
The first two channels added correspond to the
masks containing information about the binary ridge
pattern (Mask Bin) and the segmentation map (Mask
Seg). These two channels allow obtaining addi-
tional information about different regions in the im-
age: foreground/fingerprint, background, and ridge
lines. A sigmoid activation is used in each of these
channels, and the BCE serves as the loss function for
the corresponding additional tasks.
Two more channels were added to reconstruct the
orientation map, sine (Mask O Sen) and cosine (Mask
O Cos) masks. Due to the range of the sine and cosine
functions ([-1, 1]), we used a Tanh activation function
and the MSE loss function for optimization. To re-
cover the ridge pattern’s frequency, another channel
with normalized values between 0 and 1 was added
(Mask Frq). Normalized frequency map limits al-
lowed for Sigmoid activation and MSE loss. The total
loss of these auxiliary tasks was calculated by adding
the five individual losses, giving equal weight to each
partial loss (Equation 4).
L
extra
= BCE
Bin
+ BCE
Seg
+ MSE
O Sen
+MSE
O Cos
+ MSE
Frq
(4)
3.5 Equivariant Model
Motivated by the importance of translation equiv-
ariance in CNNs and by the fingerprint character-
istics, the goal was to obtain a Group Equivariant
CNN (Cohen and Welling, 2016), equivariant to ro-
tations and capable of performing the minutiae ex-
traction. This led to the implementation of a Group
Equivariant U-Net. The created model differs from
the baseline model in the U-Net architecture, where
G-convolutions replaced typical convolutions to cre-
ate an equivariant model. To avoid duplicate out-
put channels, the output layer convolutions were not
replaced. This work used the group p4 in the G-
convolutions.
BIOSIGNALS 2023 - 16th International Conference on Bio-inspired Systems and Signal Processing
244
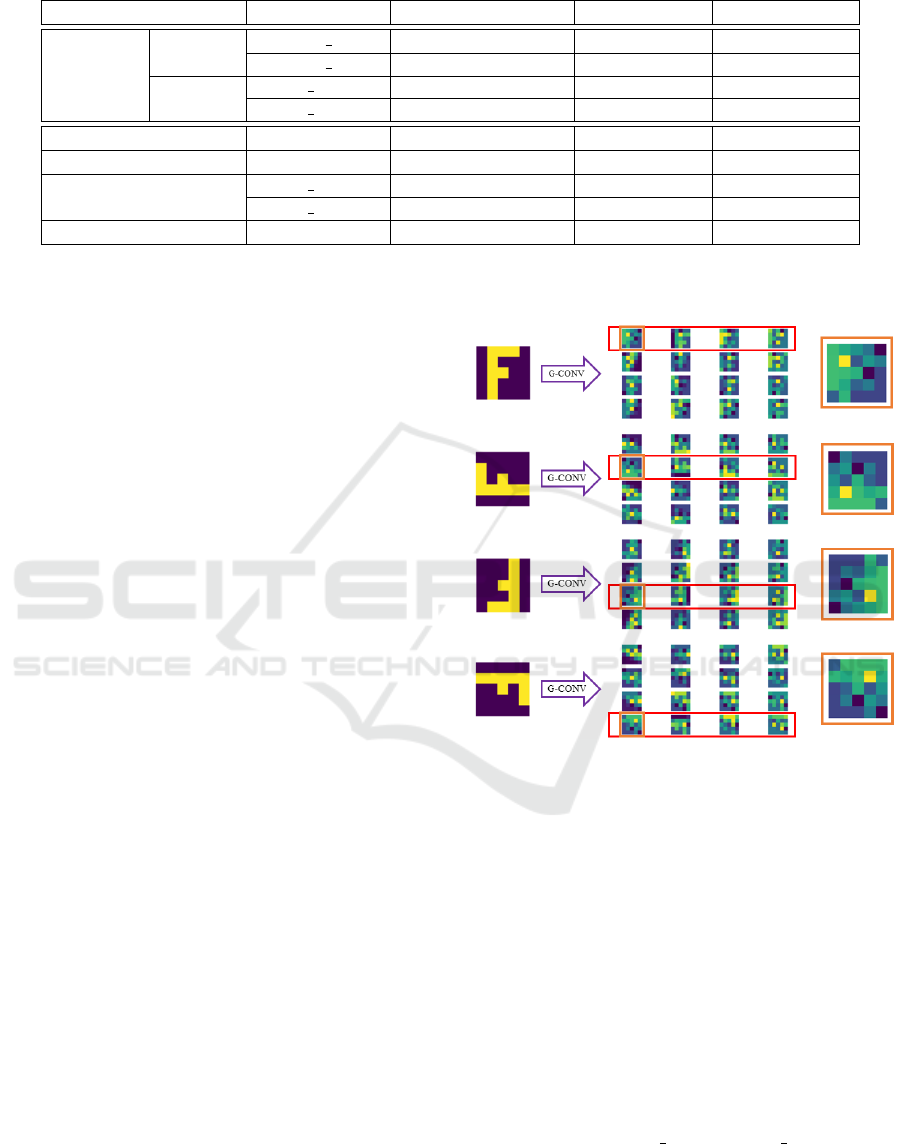
Table 1: Output channels from the U-Net model: task, activation function, loss function and channel range.
Task Channel Name Activation Function Loss Function Channel Range
Minutiae
Extraction
Position
and Type
XY 1 Sigmoid MSE [0 - 1]
XY 2 Sigmoid MSE [0 - 1]
Angle
A Cos Tanh MSE
∗
[-1 - 1]
A Sen Tanh MSE
∗
[-1 - 1]
Binary Image Bin Sigmoid BCE [0 - 1]
Segmentation Map Seg Sigmoid BCE [0 - 1]
Orientation Map
O Cos Tanh MSE
∗∗
[-1 - 1]
O Sen Tanh MSE
∗∗
[-1 - 1]
Frequency Map Frq Sigmoid MSE
∗∗
[0 - 1]
* Only computed in 21x21 boxes centered around each minutia.
** Only computed in the fingerprint region from the segmentation map.
The G-convolution can be understood as the use of
the same filter in different orientations such that a fea-
ture map is generated for each orientation. The collec-
tion of feature maps is concatenated such that a rota-
tion on the input causes a rotation and a shift on the
output (see Figure 1). The subsequent G-convolution
layers account for this shift when transforming their
filters, such that, when multiple layers are stacked,
this input-output relationship is maintained. As such,
the model can maintain equivariance to rotation. The
G-convolutions can be defined according if they are
in the first layer of a CNN being applied to an in-
put image (Equation 5) (first-layer G-convolution) or
if they are applied to a feature map in a hidden layer
of the CNN (Equation 6) (full G-convolution) (Cohen
and Welling, 2016). The convolution defined in Equa-
tion 5 receives an input image f and a filter ψ, both
functions of the plane Z
2
, and outputs a feature map
( f ∗ ψ) function of the discrete group G. For the con-
volution defined in Equation 6, the filters ψ need also
to be functions on G.
[ f ∗ ψ](g) =
∑
y∈Z
2
∑
k
f
k
(y)ψ
k
(g
−1
y) (5)
[ f ∗ ψ](g) =
∑
h∈G
∑
k
f
k
(h)ψ
k
(g
−1
h) (6)
When replacing convolutions with their equivari-
ant counterpart, we maintained the same number of
channels. This ensures that the models are equivalent
in terms of the number of operations resulting in a re-
duction of the network’s trainable parameters. This
reduction corresponds to using four rotated copies of
each filter for the G-convolutions layers and is equiva-
lent to a reduction of approximately one-quarter (from
17.3 million to 4.3 million trainable parameters). In
addition, to ensure rotation-equivariance the batch
normalization was implemented with a single scale
and bias parameter per each p4 G-feature map.
Figure 1: Graphical representation of the G-convolution
equivariance, considering a convolution with 1 input chan-
nel and 16 output channels.
3.6 Post-Processing
A correlation between the masks with the outputs and
the Gaussian template is performed in the first step
of the post-processing method. For the correlation,
it was used a window with the same size and stan-
dard deviation as the one used for the target construc-
tion. The peaks of the correlation result with a value
above the threshold of 1.0 were selected. In addi-
tion, the maximum number of peaks possible to ex-
tract was 100. When two peaks were very close (less
than 5 pixels apart), the peak with the higher inten-
sity was always chosen. The mask in which the peak
was verified (Mask XY 1 or Mask XY 2) determined
the minutia type (type 1 or type 2). After identify-
ing the points with minutia, the angle sine and cosine
outputs were used to calculate the angle. A circular
Deep Minutiae Fingerprint Extraction Using Equivariance Priors
245

mean is computed for each minutia position to cal-
culate the mean angle in a 5 × 5 window around the
minutia. The formula for the circular mean is pre-
sented in Equation 7, where a corresponds to the av-
erage angle value calculated over N sine and cosine
sample values. Each minutia was also assigned a rel-
ative quality based on the intensity of the correlation
map.
a = arctg(
1
N
N
∑
i=1
sen(a
i
),
1
N
N
∑
i=1
(cos(a
i
)) (7)
4 EXPERIMENTAL SETUP
The work proposed in this paper began with the im-
plementation of a basic U-Net model design to ex-
tract only the minutiae information from a grayscale
fingerprint image, as described in Section 3.3. The
model was then modified to use a more complex
multi-task learning approach, in which the methodol-
ogy extracts more information from the image, such
as binary image, segmentation, frequency, and orien-
tation maps (Section 3.4). Alternatively, the equivari-
ant architecture described in Section 3.5 was imple-
mented to obtain a Group Equivariant U-Net. Finally,
we combine the two strategies in the same model.
All the model’s outputs were post-processed using the
same method (Section 3.6).
The optimization of the models followed the
pipeline presented in Figure 2. The models were
trained for 100 epochs, using the Adam optimizer al-
gorithm, with a learning rate of 1e
−1
and using a batch
size of 8. The datasets used for training, validation,
and testing are described in Section 4.1 and the mod-
els were evaluated using the metrics presented in Sec-
tion 4.2
4.1 Data
4.1.1 Synthetic Fingerprint Databases
The training of CNNs, for minutiae extraction, de-
mands a large number of fingerprint images with cor-
rect annotations for the minutiae information. Due
to the difficulty in annotation and privacy concerns,
synthetic databases were used. These databases were
created using the Synthetic Fingerprint Generator
(SFinGe) available in
1
(Maltoni et al., 2022). The
generator tries to mimic inter-class and intra-class
variations of real fingerprints, i.e., creates examples
1
https://bit.ly/3ysNNej
of the “same individual” and from “different individ-
uals”. This software generates:
1. Grayscale image of the fingerprint;
2. Binary image with the pattern of fingerprint’s
ridges and valleys pattern.;
3. Frequency map with the frequency of the ridges
and valleys pattern;
4. Orientations map with the angle of the ridges and
valleys;
5. Segmentation map with information on the region
of the fingerprint versus the background;
6. Minutiae template with information about the
minutiae coordinates, angle and type (type 1 for a
termination point or type 2 for a bifurcation point)
A total number of 21600 synthetic images (8 dif-
ferent images from 2700 different individuals) were
used for training the models and 7200 synthetic im-
ages (8 different images from 900 different individu-
als) were used to validate the models.
4.1.2 Real Fingerprint Databases
For testing the different models, the real fingerprint
images provided by the Fingerprint Verification Com-
petition (FVC) were chosen. These databases con-
tain fingerprint images obtained with various sensors,
resulting in different features, which are useful for
testing the universality and robustness of the vari-
ous steps of a Fingerprint Recognition System (Maio
et al., 2002a; Maio et al., 2002b; Cappelli et al., 2005;
Cappelli et al., 2007).
4.1.3 Data Augmentation
Different data augmentation techniques were simul-
taneously applied to approximate the synthetic train-
ing images to real ones. The first set of transforma-
tions tried to mimic image textures when acquired by
different sensors with low noise levels. They were
only adopted in grayscale images. It includes con-
trast, brightness, saturation, blurring, sharpening, and
inversion. The second set randomly crops and trans-
lates the image. It mimics the need to process non-
centered partial fingerprints. The last set included
random fingerprint rotations (from 0°and 360°) and
flips (horizontal and vertical). They were applied to
provide the model fingerprints in diverse orientations,
not just vertically, but also to provide minutiae in di-
verse orientations. Data augmentation was performed
online and for each image was applied simultaneously
one transformation from each set.
BIOSIGNALS 2023 - 16th International Conference on Bio-inspired Systems and Signal Processing
246
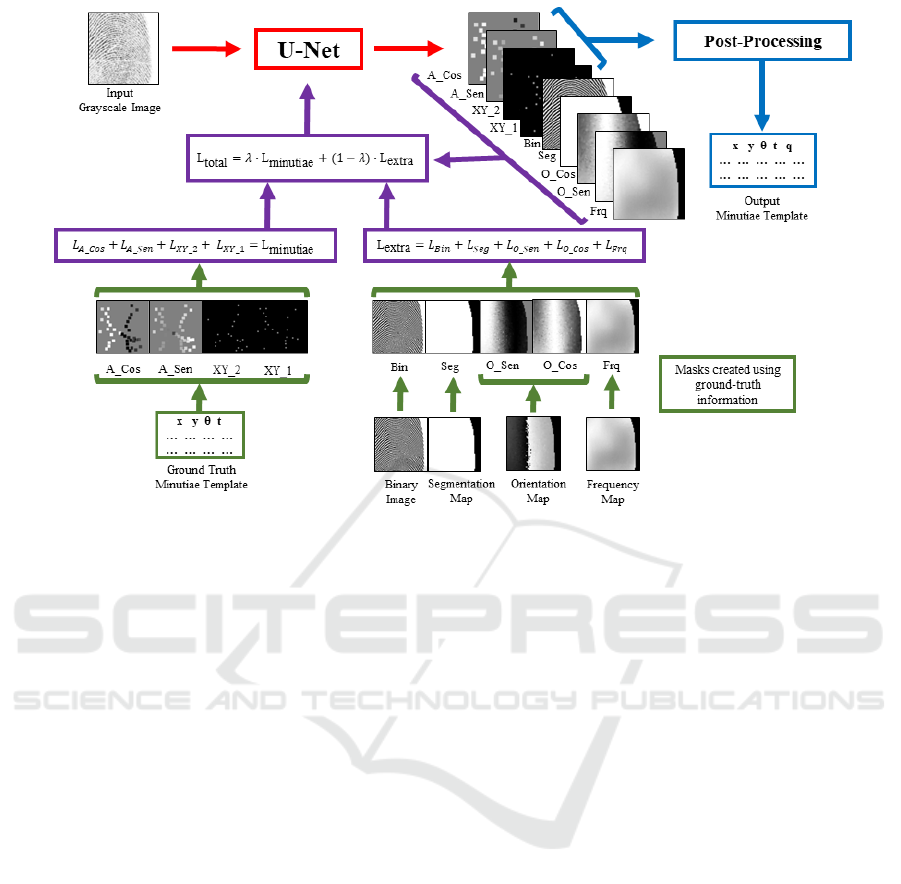
Figure 2: The complete pipeline used for the U-Net models training.
4.2 Minutiae Extraction Evaluation
The evaluation of the different models for minutiae
extraction was centred on two main objectives: 1) the
ability to obtain the correct information of each minu-
tia - coordinates, angle, and type; and 2) the ability to
distinguish fingerprints of different individuals when
the extracted templates are used by a matching algo-
rithm.
The Goodness Index (GI) was used to evaluate
the proportion of the minutiae that were well de-
tected, spurious, and not detected (Peralta et al., 2014;
Bhattacharjee and Lee, 2010). To the GI calculus,
a minutia was considered well-detected when inside
a 13 × 13 box centered on the closest ground-truth
minutiae. In addition to the standard GI, more strict
criteria to classify a minutia as well-detected were
considered. It was also considered in addition to the
position that the minutia angle must be within ±20°of
the ground truth minutiae to be considered as well de-
tected (GI (w/a)). This metric measures the model’s
ability to identify the minutia angle. To evaluate the
model’s ability to extract the minutiae type correctly,
the GI (w/t) was used, in this situation the minutia
type was used in addition to the minutia position as
criteria. The GI (w/at) considers all three criteria dur-
ing the minutia classification.
The Equal Error Rate (EER) calculus in accor-
dance with the FVC protocol (Maio et al., 2002a;
Maio et al., 2002b; Cappelli et al., 2005; Cappelli
et al., 2007) was used to evaluate the quality of the
model when used in conjunction with a matching
algorithm for fingerprint verification. The match-
ing algorithm was based on the Minutia Cylinder-
Code (MCC) representation combined with the Local
Similarity Assignment with Relaxation (LSA-R) was
used (Cappelli et al., 2010; Rebelo et al., 2019).
The models were compared against two baseline
minutiae extraction solutions: a well-optimized, tra-
ditional commercial method for minutiae extraction -
the fingerIDALg (Rebelo et al., 2019); and a state-of-
the-art method based on deep learning combined with
domain knowledge- the FingerNet (Tang et al., 2017).
5 RESULTS AND DISCUSSION
The results for the validation set that contains only
synthetic images were based on the GI values and are
depicted in Table 2. To evaluate the performance of
the models in test sets, due to the lack of ground-truth
annotations, the results were based on EER values and
are presented in Table 3.
5.1 Baseline Model
In the validation set with synthetic images, the non-
equivariant model with lambda
total
of 1.0 performs
better than the fingerIDALg (a GI of 0.01 versus -
Deep Minutiae Fingerprint Extraction Using Equivariance Priors
247
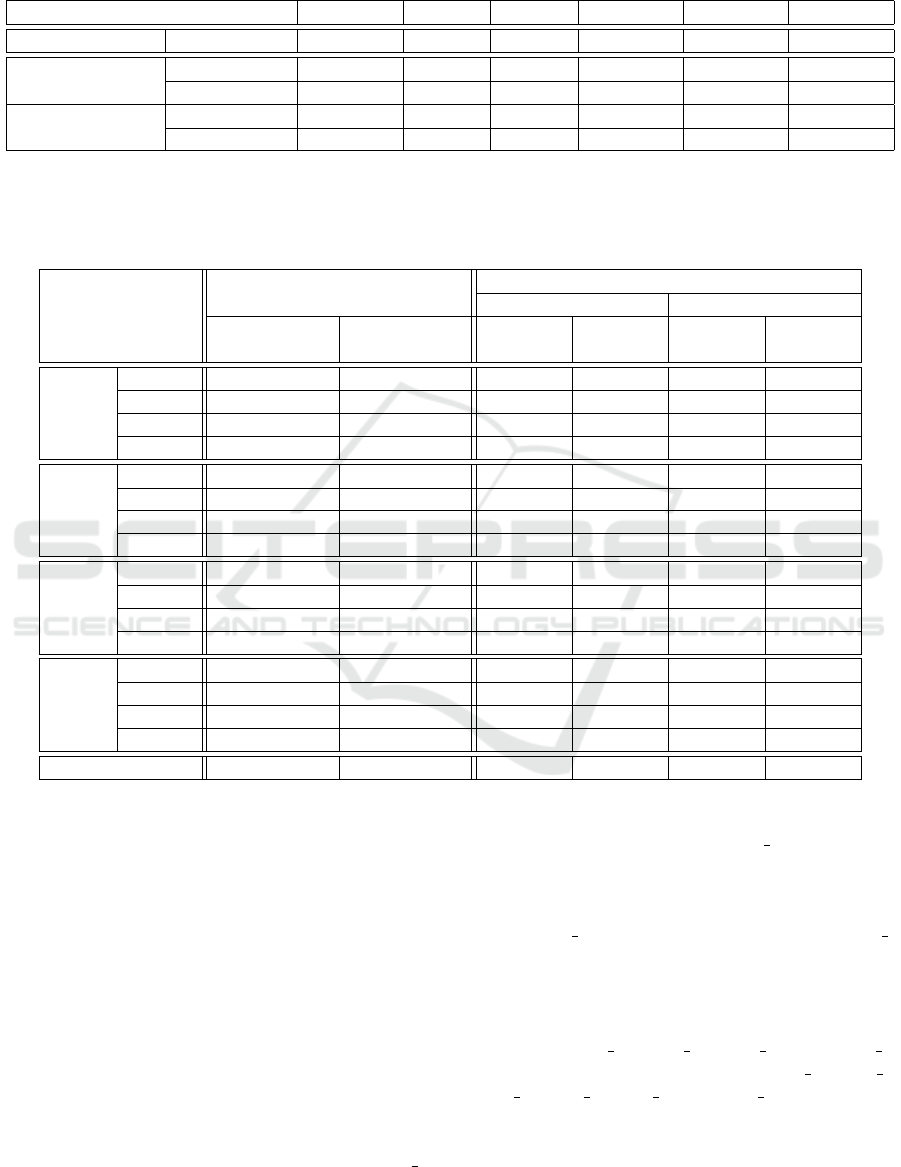
Table 2: Results for the validation set of the reference system and all the four models: GI, Percentage missing minutiae (%M),
percentage of spurious minutiae (%S), and the GI considering the angle (w/a), the type (w/t) and both (w/at) as a criterion for
classification of a minutia as well detected.
Model GI %M
∗
%S
∗∗
GI (w/a) GI (w/t) GI (w/at)
Reference fingerIDALg -0.05 34.53 37.77 -0.24 -0.32 -0.47
Non-Equivariant
λ
total
= 1.0 0.01 30.71 40.73 -0.19 -0.27 -0.43
λ
total
= 0.8 0.01 30.51 42.55 -0.21 -0.26 -0.43
Equivariant
λ
total
= 1.0 0.02 30.27 41.18 -0.18 -0.26 -0.42
λ
total
= 0.8 0.02 30.40 40.21 -0.18 -0.23 -0.39
* Calculated in relation to the ground truth minutiae set.
** Calculated in relation to the extracted minutiae set.
Table 3: EER (%) values for the reference systems and the four models for the different FVC databases; and the average of
the EER (%) for all the FVC databases.
FVC Database
Reference
Model
Non-Equivariant Equivariant
fingerIDALg FingerNet
λ
total
=
1.0
λ
total
=
0.8
λ
total
=
1.0
λ
total
=
0.8
2000
DB1 1.01 0.44 0.36 0.30 0.36 0.40
DB2 0.59 0.55 1.76 1.70 1.74 0.44
DB3 2.44 2.40 3.84 4.08 4.65 3.72
DB4
∗
1.33 1.84 0.79 0.79 0.65 0.69
2002
DB1 0.65 0.65 0.55 0.69 0.44 0.63
DB2 0.30 0.32 0.30 0.40 0.26 0.18
DB3 2.83 1.29 2.18 1.86 1.76 1.58
DB4
∗
0.99 0.85 0.30 0.40 0.32 0.18
2004
DB1 3.94 3.01 3.15 3.37 3.19 2.79
DB2 3.01 3.39 3.58 4.79 3.09 3.84
DB3 2.73 2.18 3.92 3.15 3.39 3.23
DB4
∗
2.08 1.86 1.01 0.97 0.73 0.79
2006
DB1 11.41 21.96 14.77 12.00 13.66 12.63
DB2 0.55 0.10 1.37 1.70 1.01 1.25
DB3 5.25 3.76 4.26 4.22 3.98 3.29
DB4
∗
2.91 1.29 0.83 0.73 0.69 0.59
Average EER(%) 2.63 2.87 2.69 2.57 2.49 2.26
* Synthetic Databases
0.05). The GI (w/a) results show that the baseline
model misses some minutia angles, but it outperforms
the commercial solution. The model fails to identify
some minutia types but performs better than the ref-
erence system. GI (w/at) results show that the model
can fail in minutia type and predict minutia orienta-
tion and vice versa.
Table 3 shows the EER (%) values for all the
16 FVC test sets using the fingerIDALg, the Finger-
Net, and the models proposed in this work. Com-
paring both reference systems, one based on tradi-
tional methods and the other on deep learning com-
bined with domain knowledge, the traditional method
has a lower average EER value: 2.63% versus 2.87%.
The fingerIDALg had the lowest EER for the 2002 2
database and the highest for the 2006 1 database. This
results in a range from 0.30% to 11.41% which shows
a high-performance range for the test datasets.
The baseline model’s lower EER value was 0.30%
in the 2002 2 database and 14.77% in the 2006 1
database. EER averaged 2.69%. These results show
that the baseline model is competitive in compari-
son with a well-optimized commercial system, sur-
passing it in 10 of 16 test databases: 4 synthetic
databases (2000 4; 2002 4; 2004 4; and 2006 4)
and 6 databases with real images (2000 1; 2002 1;
2002 2; 2002 3; 2004 1; and 2006 3). The baseline
model outperforms the state-of-the-art reference, the
FingerNet, in 8 test sets (4 synthetic and 4 real test
sets). Notice that 12 real test sets contain images out-
BIOSIGNALS 2023 - 16th International Conference on Bio-inspired Systems and Signal Processing
248

domain in comparison with the 4 synthetic test sets
that are from a domain similar to the training domain.
This explains the high variability in results and the
higher accuracy in the synthetic sets, as expected.
5.2 Regularization with Additional
Ground-Truth Information
Considering the lambda
total
optimization, the results
indicate that the performance of the validation set
models was independent of lambda
total
. Using a
lambda
total
value of 0.8 resulted in a similar GI value
than using a lambda
total
value of 1.0, and when the
percentage of missing and suspicious data is consid-
ered, the performance of both models is also compa-
rable.
The EER values for the test set shown in Table 3,
indicate that a lambda
total
value of 0.8 can reduce the
average EER value to 2.57%. This value falls below
the average value of the reference systems. In 11 of
the test sets, the EER value was decreased due to the
reduction of lambda
total
.
These results show that adding extra tasks to the
model can act as regularization during optimization,
leading to better minutiae extraction. This model can
also extract more information from a greyscale fin-
gerprint image, which can be useful for some more
sophisticated matching algorithms.
5.3 Equivariant Models
Regarding the introduction of equivariance, the equiv-
ariant model with a lambda
total
of 1.0 has a slightly
higher GI value (0.02) than the baseline model, but
their performance in the validation set is very similar
(see Table 2). The same occurs for the models with a
lambda
total
of 0.8.
The use of an equivariant architecture leads to
more robust models allowing both equivariant models
to outperform the reference systems. In particular, the
EER decreased from 2.69% to 2.49% when no addi-
tional regularization was used (lambda
total
= 1.0) and
was comparable for the scenario when lambda
total
=
0.8 (reduction from 2.57% to 2.26%). These results
showed that the best model performance occurs with
the combination of an equivariant architecture with a
regularization with extra ground-truth information.
We conducted an additional test to assess the
impact of the proposed architectural change on the
model’s rotation equivariance property. For this, we
rotated all the test images in the 2000 1 FVC dataset
by a constant angle before being fed to the model.
Then, the output minutiae were readjusted to the orig-
inal position and compared to the ones obtained with
the initial images (with no rotation). The average
difference between these outputs for different input
angles is shown in Figure 3. The results show a
lower average output angle deviation for the equiv-
ariant model. This is more meaningful for the input
rotation angles multiple from 90°, as expected since
the rotation equivariance of the network was assured
for the p4 group. Despite this, a deviation of 0°is only
achieved to input rotations of 0°since the output layer
of the Group Equivariant U-Net uses a typical convo-
lution that does not assure rotation equivariance.
Figure 3: Average output angle deviation in the function
of the fixated input rotation angle, for the 2000 1 dataset,
computed for the models with λ
total
= 1, and for an ideal
model with a constant angle deviation of 0°.
The final model (equivariant and with lambda
total
of 0.8) presented the lower average ERR with the
value of 2.26%. However, a large interval of EER
values from 0.18% (2002 2) to 12.63% (2006 1)
was verified. Figure 4 shows one image from each
database with the minutiae set extracted by the final
model. The images are examples of the diversity of
the fingerprint images used to test the models and
how the acquisition conditions can change the char-
acteristics of the fingerprint images and by that the
fingerprint domain. This also shows that the synthetic
generator even when combined with the data augmen-
tation techniques during the training process, is not
capable of mimicking, with the same quality the dif-
ferent fingerprints domain. In the case of Figure 4a,
the pattern of ridges and valleys is well-defined which
allows the correct minutiae extraction, this image be-
longs to a dataset with a domain close to the synthetic
domain. For the case, of Figure 4b, the model par-
tially fails to detect the fingerprint pattern with the
quality needed for a correct minutiae extraction, the
degradation, and the poor quality of this kind of im-
ages from this domain cannot be mimicked syntheti-
cally with the quality need to obtain a good general-
ization of the models to this domain.
Deep Minutiae Fingerprint Extraction Using Equivariance Priors
249

(a) (b)
Figure 4: Test images with the minutiae sets extracted by
the equivariant model with lambda
total
of 0.8: image 100 1
from the 2002 2 (a) and 2006 1 (b) datasets.
6 CONCLUSIONS
The model developed in this paper outperformed a
well-optimized commercial solution, resulting in a
lower EER average for fingerprint images from var-
ious sensors. Rotation equivariance improved results,
especially model generalization. Furthermore, this
paper demonstrated that including equivariance pri-
ors into the network architecture based on the finger-
print’s prior knowledge can help deep learning meth-
ods match or exceed the performance of traditional
systems. The introduction of extra tasks enabled reg-
ularization and knowledge transfer, resulting in better
results. This allows the development of a model that
extracts more information from the same fingerprint
image without jeopardizing the main task of minutiae
extraction.
Taking the final architecture into account, future
research can be conducted to improve generaliza-
tion. This paper focused on discrete rotation equiv-
ariance. A future model may include the incorpora-
tion of equivariance to a continuous range of rotations
and equivariance to scale transformations. In addi-
tion, with the goal of achieving a more competitive
model, the computational cost must be reduced, with
special attention to the processing time.
ACKNOWLEDGEMENTS
This work is financed by National Funds through
the Portuguese funding agency, FCT - Fundac¸
˜
ao
para a Ci
ˆ
encia e a Tecnologia, within project
UIDB/50014/2020.
REFERENCES
Adiga V, S. and Sivaswamy, J. (2019). FPD-M-net:
Fingerprint Image Denoising and Inpainting Us-
ing M-Net Based Convolutional Neural Networks.
arXiv:1812.10191 [cs]. arXiv: 1812.10191.
Bhattacharjee, N. and Lee, C. E. (2010). Fingerprint Image
Processing And Fuzzy Vault Implementation. Journal
of Mobile Multimedia, pages 314–338.
Cappelli, R., Ferrara, M., Franco, A., and Maltoni, D.
(2007). Fingerprint verification competition 2006.
Biometric Technology Today, 15(7-8):7–9.
Cappelli, R., Ferrara, M., and Maltoni, D. (2010). Minutia
Cylinder-Code: A New Representation and Matching
Technique for Fingerprint Recognition. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
32:2128–41.
Cappelli, R., Maio, D., Maltoni, D., Wayman, J. L., and
Jain, A. K. (2005). Performance evaluation of finger-
print verification systems. IEEE transactions on pat-
tern analysis and machine intelligence, 28(1):3–18.
Castro, E., Pereira, J. C., and Cardoso, J. S. (2020). Soft Ro-
tation Equivariant Convolutional Neural Networks. In
2020 International Joint Conference on Neural Net-
works (IJCNN), pages 1–8. ISSN: 2161-4407.
Cohen, T. S. and Welling, M. (2016). Group Equivariant
Convolutional Networks. arXiv:1602.07576 [cs, stat].
arXiv: 1602.07576.
Dieleman, S., Fauw, J. D., and Kavukcuoglu, K. (2016).
Exploiting Cyclic Symmetry in Convolutional Neural
Networks. In Proceedings of The 33rd International
Conference on Machine Learning, pages 1889–1898.
PMLR. ISSN: 1938-7228.
Gerken, J. E., Aronsson, J., Carlsson, O., Linander, H.,
Ohlsson, F., Petersson, C., and Persson, D. (2021).
Geometric Deep Learning and Equivariant Neural
Networks. arXiv:2105.13926 [hep-th]. arXiv:
2105.13926.
Hicklin, R. A. (2009). Anatomy of Friction Ridge Skin. In
Li, S. Z. and Jain, A., editors, Encyclopedia of Bio-
metrics, pages 23–28. Springer US, Boston, MA.
Jiang, H. and Liu, M. (2017). Fingerprint Minutiae De-
tection Based on Multi-scale Convolution Neural Net-
works. In Zhou, J., Wang, Y., Sun, Z., Xu, Y., Shen,
L., Feng, J., Shan, S., Qiao, Y., Guo, Z., and Yu, S., ed-
itors, Biometric Recognition, Lecture Notes in Com-
puter Science, pages 306–313, Cham. Springer Inter-
national Publishing.
Jiang, L., Zhao, T., Bai, C., Yong, A., and Wu, M. (2016). A
direct fingerprint minutiae extraction approach based
on convolutional neural networks. In 2016 Interna-
tional Joint Conference on Neural Networks (IJCNN),
pages 571–578. ISSN: 2161-4407.
Joshi, I., Anand, A., Vatsa, M., Singh, R., Roy, S. D., and
Kalra, P. (2019). Latent Fingerprint Enhancement Us-
ing Generative Adversarial Networks. In 2019 IEEE
Winter Conference on Applications of Computer Vi-
sion (WACV), pages 895–903. ISSN: 1550-5790.
Lenssen, J. E., Fey, M., and Libuschewski, P. (2018). Group
Equivariant Capsule Networks. In Advances in Neural
BIOSIGNALS 2023 - 16th International Conference on Bio-inspired Systems and Signal Processing
250

Information Processing Systems, volume 31. Curran
Associates, Inc.
Li, J., Yang, Z., Liu, H., and Cai, D. (2018). Deep Rotation
Equivariant Network. Neurocomputing, 290:26–33.
Maio, D., Maltoni, D., Cappelli, R., Wayman, J. L., and
Jain, A. K. (2002a). Fvc2000: Fingerprint verification
competition. IEEE transactions on pattern analysis
and machine intelligence, 24(3):402–412.
Maio, D., Maltoni, D., Cappelli, R., Wayman, J. L., and
Jain, A. K. (2002b). Fvc2002: Second fingerprint ver-
ification competition. In 2002 International Confer-
ence on Pattern Recognition, volume 3, pages 811–
814. IEEE.
Maltoni, D., Maio, D., Jain, A. K., and Feng, J. (2022).
Fingerprint Synthesis. In Maltoni, D., Maio, D., Jain,
A. K., and Feng, J., editors, Handbook of Fingerprint
Recognition, pages 385–426. Springer International
Publishing, Cham.
Naderi, H., Goli, L., and Kasaei, S. (2020). Scale Equiv-
ariant CNNs with Scale Steerable Filters. In 2020 In-
ternational Conference on Machine Vision and Image
Processing (MVIP), pages 1–5. ISSN: 2166-6784.
Nguyen, D.-L., Cao, K., and Jain, A. K. (2017). Robust
Minutiae Extractor: Integrating Deep Networks and
Fingerprint Domain Knowledge. arXiv:1712.09401
[cs]. arXiv: 1712.09401.
Nguyen, V. H., Liu, J., Nguyen, T. H. B., and
Kim, H. (2020). Universal fingerprint minu-
tiae extractor using convolutional neural net-
works. IET Biometrics, 9(2):47–57. eprint:
https://onlinelibrary.wiley.com/doi/pdf/10.1049/iet-
bmt.2019.0017.
Peralta, D., Galar, M., Triguero, I., Miguel-Hurtado, O.,
Benitez, J. M., and Herrera, F. (2014). Minutiae filter-
ing to improve both efficacy and efficiency of finger-
print matching algorithms. Engineering Applications
of Artificial Intelligence, 32:37–53.
Peralta, D., Galar, M., Triguero, I., Paternain, D., Garc
´
ıa,
S., Barrenechea, E., Ben
´
ıtez, J. M., Bustince, H., and
Herrera, F. (2015). A survey on fingerprint minutiae-
based local matching for verification and identifica-
tion: Taxonomy and experimental evaluation. Infor-
mation Sciences, 315:67–87.
Pinetz, T., Huber-M
¨
ork, R., Soukop, D., and Sablatnig, R.
(2017). Using a U-Shaped Neural Network for minu-
tiae extraction trained from refined, synthetic finger-
prints. In 2017 Proceedings of the OAGM & ARW
Joint Workshop Vision, Automation and Robotics.
Rebelo, A., Oliveira, T., Correia, M. E., and Cardoso,
J. S. (2019). Are Deep Learning Methods Ready for
Prime Time in Fingerprints Minutiae Extraction? In
Vera-Rodriguez, R., Fierrez, J., and Morales, A., edi-
tors, Progress in Pattern Recognition, Image Analysis,
Computer Vision, and Applications, Lecture Notes in
Computer Science, pages 628–636, Cham. Springer
International Publishing.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-Net:
Convolutional Networks for Biomedical Image Seg-
mentation. In Navab, N., Hornegger, J., Wells, W. M.,
and Frangi, A. F., editors, Medical Image Computing
and Computer-Assisted Intervention – MICCAI 2015,
Lecture Notes in Computer Science, pages 234–241,
Cham. Springer International Publishing.
Ruder, S. (2017). An Overview of Multi-Task Learning
in Deep Neural Networks. http://arxiv.org/abs/1706.
05098. arXiv:1706.05098 [cs, stat].
Takahashi, A., Koda, Y., Ito, K., and Aoki, T. (2020). Fin-
gerprint Feature Extraction by Combining Texture,
Minutiae, and Frequency Spectrum Using Multi-Task
CNN. In 2020 IEEE International Joint Conference
on Biometrics (IJCB), pages 1–8. ISSN: 2474-9699.
Tang, Y., Gao, F., Feng, J., and Liu, Y. (2017). FingerNet:
An unified deep network for fingerprint minutiae ex-
traction. In 2017 IEEE International Joint Conference
on Biometrics (IJCB), pages 108–116. ISSN: 2474-
9699.
Worrall, D. E., Garbin, S. J., Turmukhambetov, D.,
and Brostow, G. J. (2017). Harmonic Net-
works: Deep Translation and Rotation Equivariance.
arXiv:1612.04642 [cs, stat]. arXiv: 1612.04642.
Zhang, Z., Liu, S., and Liu, M. (2021). A multi-task
fully deep convolutional neural network for contact-
less fingerprint minutiae extraction. Pattern Recogni-
tion, 120:108189.
Zhou, B., Han, C., Liu, Y., Guo, T., and Qin, J. (2020).
Fast minutiae extractor using neural network. Pattern
Recognition, 103:107273.
Deep Minutiae Fingerprint Extraction Using Equivariance Priors
251
