
Quantum Reinforcement Learning for Solving a Stochastic Frozen Lake
Environment and the Impact of Quantum Architecture Choices
Theodora-Augustina Dr
˘
agan
1
, Maureen Monnet
1
, Christian B. Mendl
2,3
and Jeanette M. Lorenz
1
1
Fraunhofer Institute for Cognitive Systems IKS, Munich, Germany
2
Technical University of Munich, Department of Informatics, Boltzmannstraße 3, 85748 Garching, Germany
3
Technical University of Munich, Institute for Advanced Study, Lichtenbergstraße 2a, 85748 Garching, Germany
jeanette.miriam.lorenz@iks.fraunhofer.de
Keywords:
Quantum Reinforcement Learning, Proximal Policy Optimization, Parametrizable Quantum Circuits, Frozen
Lake, Expressibility, Entanglement Capability, Effective Dimension.
Abstract:
Quantum reinforcement learning (QRL) models augment classical reinforcement learning schemes with
quantum-enhanced kernels. Different proposals on how to construct such models empirically show a promis-
ing performance. In particular, these models might offer a reduced parameter count and shorter times to reach
a solution than classical models. It is however presently unclear how these quantum-enhanced kernels as
subroutines within a reinforcement learning pipeline need to be constructed to indeed result in an improved
performance in comparison to classical models. In this work we exactly address this question. First, we pro-
pose a hybrid quantum-classical reinforcement learning model that solves a slippery stochastic frozen lake, an
environment considerably more difficult than the deterministic frozen lake. Secondly, different quantum ar-
chitectures are studied as options for this hybrid quantum-classical reinforcement learning model, all of them
well-motivated by the literature. They all show very promising performances with respect to similar classical
variants. We further characterize these choices by metrics that are relevant to benchmark the power of quan-
tum circuits, such as the entanglement capability, the expressibility, and the information density of the circuits.
However, we find that these typical metrics do not directly predict the performance of a QRL model.
1 INTRODUCTION
Reinforcement learning (RL) is one of the pillars of
machine learning, together with supervised and un-
supervised learning. It has many industry-relevant
applications, such as robotic tasks on assembly lines
(Christiano et al., 2016), drug design (Popova et al.,
2018), and navigation tasks (Zhu et al., 2017). When
applying RL to complex settings and environments,
there is currently a tendency to focus on approximate
solutions due to the complexity involved. In this con-
text, the use of (deep) neural networks (NN) as value
function approximators inside the policy of the RL
agent has gained in popularity. Here, the state of
the environment is processed by a NN in order to at-
tribute a value function to it, or to estimate the value
of each possible action to be taken from that state.
This leads to policy gradient algorithms such as Deep
Q-Networks (DQN) (Mnih et al., 2013) and Proximal
Policy Optimization (PPO) (Schulman et al., 2017),
which can even play video games such as “Space In-
vaders” (Mnih et al., 2013). The issues with these
approaches, however, is that they use increasingly
deep NNs, which may take several days of training
on a GPU for one problem instance (Ceron and Cas-
tro, 2021). With increasingly complex environments,
these methods may therefore experience scaling is-
sues. Hence, it is interesting to explore alternative
methods and directions.
The use of quantum computing (QC) subroutines
could be a promising path for RL. QC has theo-
retically been shown to exponentially or polynomi-
nally accelerate important subroutines, in particular
for search problems via Grover’s algorithm (Grover,
1996) or for solving systems of linear equations with
the HHL algorithm (Harrow et al., 2009). Moreover,
theoretical work (Caro et al., 2022) shows that certain
quantum algorithms and quantum-enhanced models
may lead to a better generalization than classical al-
gorithms in the case of a small training dataset. Fur-
ther work hints that quantum algorithms may be able
to observe new non-trivial characteristics in the data
Dr
˘
agan, T., Monnet, M., Mendl, C. and Lorenz, J.
Quantum Reinforcement Learning for Solving a Stochastic Frozen Lake Environment and the Impact of Quantum Architecture Choices.
DOI: 10.5220/0011673400003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 2, pages 199-210
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
199

(Liu et al., 2021), as well as to reach similar or better
results, while requiring less training steps (Heimann
et al., 2022).
Different successful proposals have been made on
how quantum algorithms could be integrated in RL
models. These can be distinguished into two main
directions, either trying to employ quantum search al-
gorithms as replacement for the agent (Niraula et al.,
2021), or replacing the NN part with a quantum cir-
cuit (Heimann et al., 2022). Possible application
fields include robot navigation tasks (Heimann et al.,
2022) or medical tasks. E.g., within the oncological
area, a proposal was made to adapt the radiotherapy
treatment plans of lung cancer patients depending on
how they have responded to previous treatments (Ni-
raula et al., 2021). However, none of the existing
works in quantum reinforcement learning (QRL) have
investigated the correlation between the performance
of the solution and the architecture of the quantum cir-
cuit yet. It is indeed unclear from the literature what
more or less promising architectures for quantum ker-
nels within a RL model might be.
Within this work, we investigate multiple addi-
tions to the field. First, we define a variant of the
slippery frozen lake (FL) example (Brockman et al.,
2016), which is a significantly more difficult stochas-
tic environment in comparison to the typically used
deterministic FL. We then consider a variety of dif-
ferent hybrid quantum-classical (HQC) PPO mod-
els, where the NNs of the classical algorithm are re-
placed by parametrised quantum circuits (PQC). We
obtain good performance in comparison to the classi-
cal models considered, with respect to the number of
time steps required until training convergence and the
maximal reward reached during training. The quan-
tum circuits within these models are chosen following
suggestions from the literature about promising quan-
tum circuits (Sim et al., 2019), which e.g., are more
efficient in using present-term quantum hardware, or
may solve specific subproblems. We then characterise
the solution with quantum-related metrics such as en-
tanglement capability, expressibility, and effective di-
mension. We find that although all quantum circuits
show a promising performance, the gain in perfor-
mance does not seem to directly correlate to these
quantum metrics. Therefore, our work can only give
a first indication for promising quantum architectures
in QRL.
This paper is structured as follows: the next sec-
tion will present the related work and current status of
using quantum computing in RL. The third section in-
troduces the slippery FL environment and the pipeline
of our PPO-based solution. Section four details the
results achieved by our HQC PPO model. The fifth
section first defines the three quantum metrics used,
and then looks at the correlation with the results ob-
tained. Finally in the sixth section we present conclu-
sions and propose possible future research directions.
2 RELATED WORK
In the stream of HQC RL solutions that use quantum
search algorithms, a model in the oncological area has
been presented by (Niraula et al., 2021). The goal is
to adapt the last two weeks of a radiotherapy treat-
ment plan depending on the patient’s reaction to the
first four weeks of treatment. The need for artifi-
cial intelligence methods comes from the fact that nu-
merous biological factors can influence the individual
impact of the treatment. The proposed solution uses
Grover’s search to decide the next step in the course
of the treatment by taking into account the current re-
sponse. Oncological metrics were evaluated in order
to maximise the treatment outcome and optimise its
efficiency. In this particular case, QC is not used to
accelerate the calculation, but to improve the preci-
sion.
A second direction in QRL considers replacing
NNs by quantum circuits. Such methods have shown
an interesting potential to solve complex tasks while
requiring less computational resources than classical
RL models (Jerbi et al., 2021; Chen et al., 2020;
Lockwood and Si, 2020). In these cases, quantum
circuits are used for approximating both policy and
value functions.
In (Chen et al., 2020), the authors suggest using
PQCs instead of NNs in the DQN algorithm (Mnih
et al., 2015). The expectation values of the PQC
are measured and associated to the Q function of the
DQN algorithm. They obtain promising results in
solving a shortest-path deterministic FL and a Cog-
nitive Radio (Gawłowicz and Zubow, 2019) environ-
ment.
Alternatively, (Jerbi et al., 2021) replace the pol-
icy of a classical RL algorithm (Sutton and Barto,
2018) with a PQC, while computing the value func-
tion classically. This work also employs the idea of a
data re-uploading circuit (P
´
erez-Salinas et al., 2020)
in the PQC, where data embedding and variational
parts are sequentially repeated to increase the over-
all complexity of the PQC. The authors benchmark
two different hybrid quantum architectures against the
maximal reward obtained during learning on Gym en-
vironments (Brockman et al., 2016). While this work
shows a promising hybrid advantage on two environ-
ments, it is not thoroughly tested against classical so-
lutions. Nevertheless, one can clearly observe how
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
200

architectural choices and hyperparameters such as cir-
cuit depth can impact the performance.
A hybrid data re-uploading technique can also
help a robot agent to navigate through a maze-like en-
vironment and reach a desired solution, while avoid-
ing obstacles (Heimann et al., 2022). In this work,
both of the NN function approximators of the Double
Q-learning algorithm (Van Hasselt et al., 2016) were
replaced with a hybrid module containing a PQC fol-
lowed by a post-processing layer. The results of the
hybrid solution are competitive with the ones a clas-
sical solution, reaching the reward threshold after a
similar number of training steps. Moreover, the hy-
brid solution needs 10 times fewer trainable parame-
ters to solve the environment.
3 SOLVING A SLIPPERY
FROZEN LAKE
ENVIRONMENT
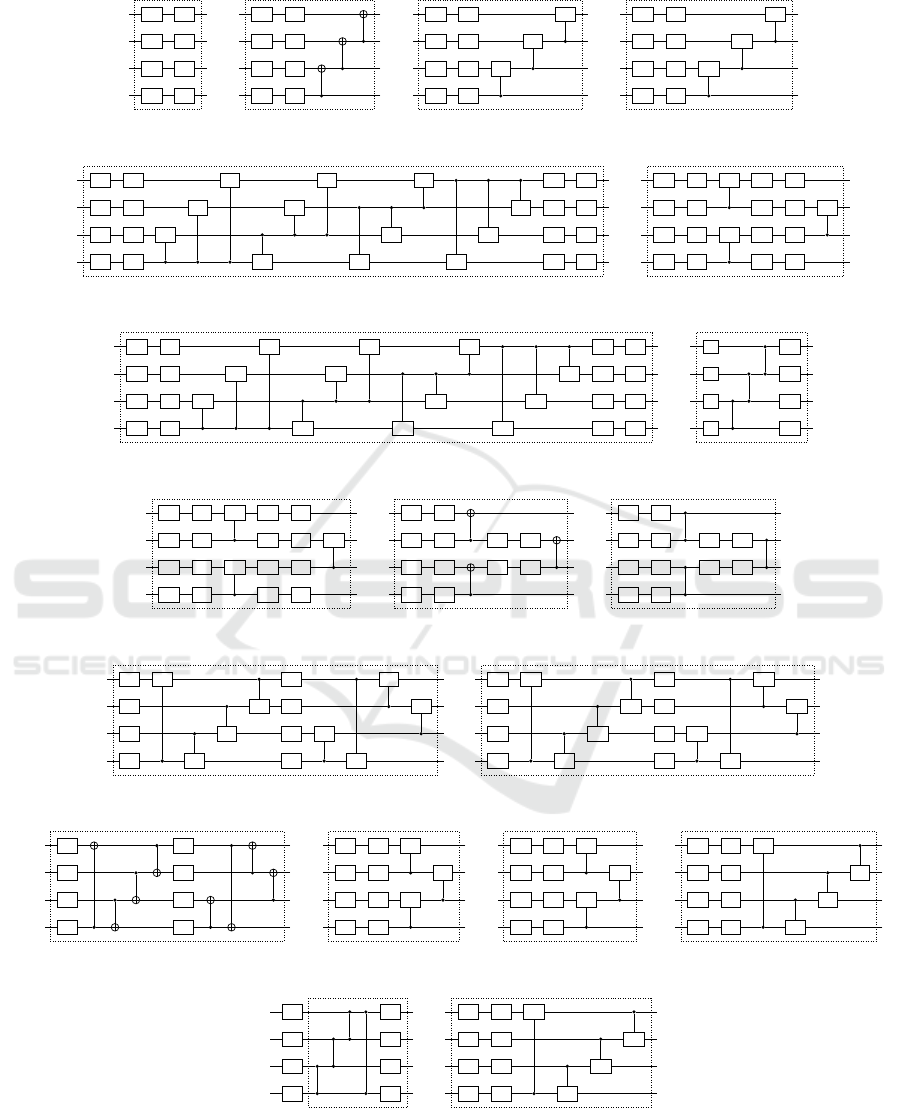
3.1 The Slippery Frozen Lake
The FL environment is a common benchmark ex-
ample in classical RL (Steckelmacher et al., 2019;
Khadke et al., 2019; Gupta et al., 2021). The task
consists of navigating through a maze e.g., of size
4x4 in this study. The maze contains four types of
discrete tiles, including the start (S), the goal (G), the
tiles with holes (H) to be avoided, and the frozen tiles
the agent can walk across (F). A previous example
of solving this environment by QRL reduced the task
to a deterministic environment, where the agent navi-
gating through the maze would always move into the
direction desired (Chen et al., 2020). We found that
even for present small QRL models, this is a fairly
simple task to solve. Therefore, we opted for a signifi-
cantly more difficult slippery FL environment (Brock-
man et al., 2016), which is stochastic in nature. In the
default stochastic FL, the probability to slip and con-
sequently to move to an orthogonal direction to the
one desired is
2
3
. To mimic real environments more
closely, we reduced the probability to slip in this study
to 20%, as shown in Fig. 2.
The tiles and thus the possible states of the envi-
ronment are integers from 0 to 15. From any position,
the agent can go left, down, right or up. If the agent
moves to a hole, it receives a final reward of 0 and the
learning process terminates. If the agent reaches the
goal, it receives a reward of 1. Moving across the lake
on the S and F tiles results in a 0 reward.
In order to control the quality of the agent that
learnt to navigate through an environment, usually a
reward threshold is established. If the reward obtained
by the agent is equal to or surpasses a given thresh-
old, the agent is considered to have successfully learnt
the environment. The reward threshold is calculated
based on the average reward obtained when following
the optimal policy. Therefore, we first determined the
optimal policy for our slippery FL environment and
averaged its rewards over 1000 test episodes. With
the resulting average reward of 0.85, we deducted a
reasonable reward threshold of 0.81, in a similar way
as done in the FL documentation (Brockman et al.,
2016).
3.2 The Architecture of the HQC
Solution
To solve our slippery FL environment, we designed a
hybrid PPO algorithm. The PPO algorithm was cho-
sen as a basis since it achieved the highest average re-
wards for many Gym environments (Schulman et al.,
2017), in comparison to other policy gradient meth-
ods. The PPO implementation used was provided by
the Stable Baselines 3 Python library (Raffin et al.,
2021).
The first experiments were performed without any
quantum kernel to create classical baselines. Here,
the policy and value function approximators are NNs
with two hidden layers of either 2, 4, 8, and 16 neu-
rons each, followed by a post-processing linear layer.
The relatively low number of neurons was chosen to
enable a fairer comparison with the hybrid variants
with quantum kernels, as these require a relatively
small number of trainable parameters. The input to
the classical solution is an one-hot vector encoding of
the state.
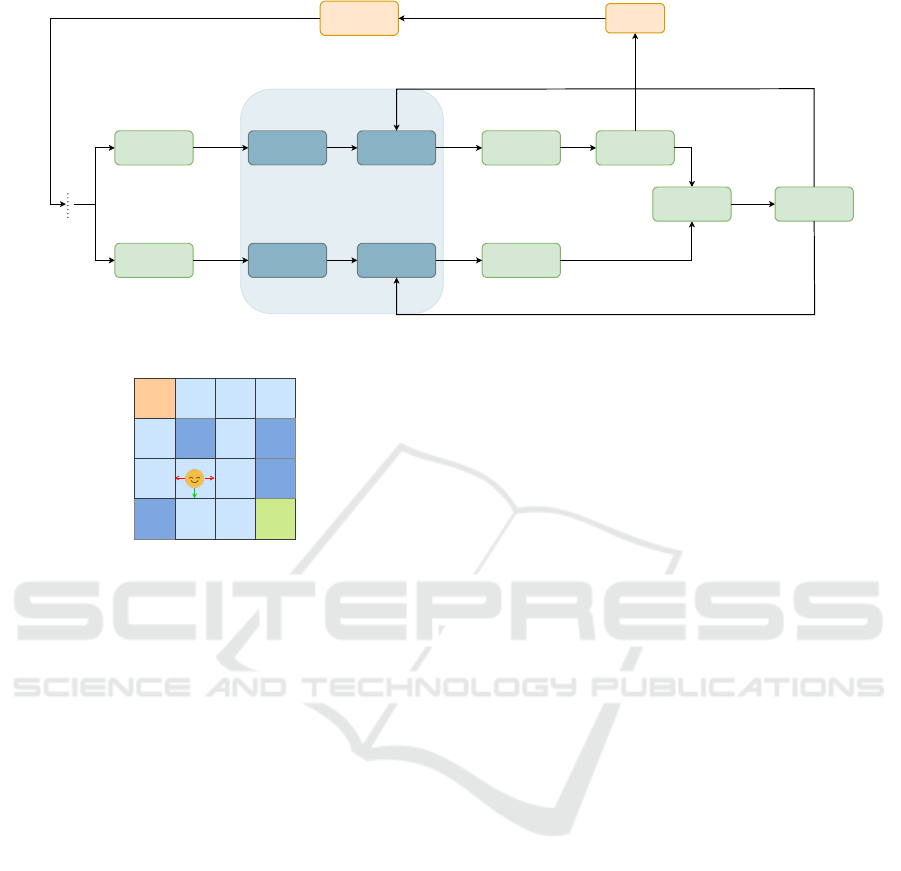
In the HQC solution, the algorithm remains the
same except for the policy and the value NNs, which
are replaced by quantum kernels, as shown in Fig. 1.
The quantum kernels consist of a data encoding, the
trainable PQC, a measurement step, and a classical
post-processing. The data encoding is done via basis
embedding using R
X
and R
Z
gates. The state index
s is transformed into its binary representation s
bin
=
s
0
s
1
s
2
s
3
, and is used to turn the default
|
0000
⟩
input
state into the ψ
s
=
|
q
0
q
1
q
2
q
3
⟩
state. This is achieved
by setting the rotational parameters of the R
X
(θ) and
R
Z
(θ) gates acting on wire i to θ = 0, if s
i
= 0, and
to θ = π if s
i
= 1. This ψ
s
state is the input to the
trainable parts of the circuits, which are the Policy
PQC and Value PQC of Fig. 1.
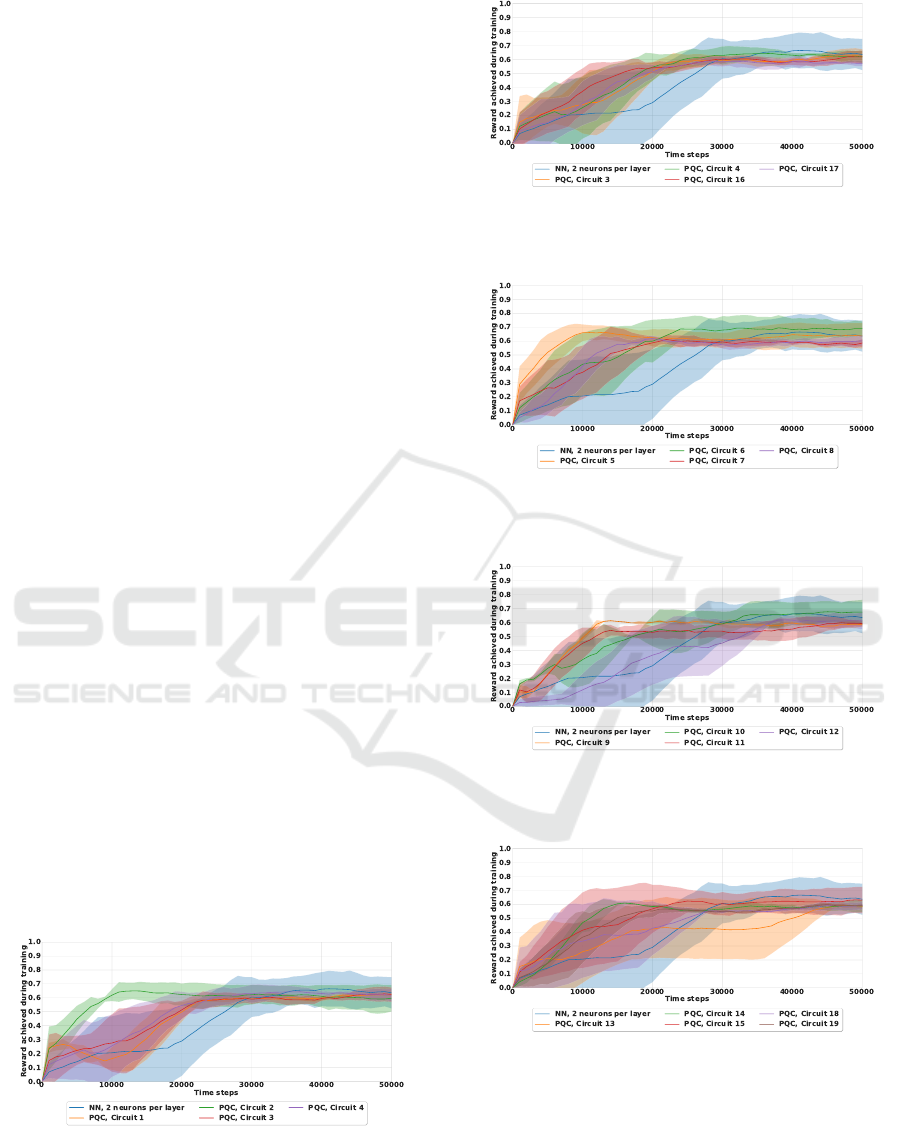
The circuit architectures are taken from the 19 cir-
cuits proposed in (Sim et al., 2019) and are shown in
Fig. 3. An argument put forward by the authors is
that these circuits were already designed for and suc-
Quantum Reinforcement Learning for Solving a Stochastic Frozen Lake Environment and the Impact of Quantum Architecture Choices
201
Binary
Conversion
Binary
Conversion
s
Basis
Embedding
Basis
Embedding
s
bin
Policy PQC
ψ
s
Value PQC
4 x 4
Linear Layer
<Z
i
>
4 x 1
Linear Layer
Quantum Module
Categorical
Distribution
l
i
π(s, a
i
)
Loss
Computation
Adam
Optimizer
V(s)
update trainable
parameters Θ
v
update trainable
parameters Θ
p
Environment
π(s, a
i
)
s'
s
bin
ψ
s
<Z
i
>
Agent
a' = argmax
a
π(s, a)
L
Figure 1: The entire pipeline of our solution.
F
GH F
F F
1 2 3
H
F
F
F H
H
7
F
6
F
4
14 1512 13
8 9 11
F
5
10
S
0
80%
10% 10%
F
GH F
F F
1 2 3
H
F
F
F H
H
7
F
6
F
4
14 1512 13
8 9 11
F
5
10
S
0
80%
10% 10%
Figure 2: The structure of the FL for the state s = 9.
cessfully applied to diverse tasks. Moreover, all cir-
cuits are designed to be implementable on presently
or soon available Noisy Intermediate-Scale Quan-
tum (NISQ) devices, at various implementation costs.
Four different entanglement gates are used: CRX,
CRZ, CNOT, and CZ and five different entanglement
topologies: linear, all-to-all, pairwise, circular, and
shifted-circular-alternating. These categories are un-
derstood as they are defined in the Qiskit documenta-
tion (Anis et al., 2021).
Circuit 1 is a basic quantum circuit with no en-
tanglement and two degrees of freedom, with rota-
tions around the X and Z axes of the Bloch sphere
for each qubit. Circuit 2, 3, and 4 were designed
by adding a basic linear entanglement using 3 differ-
ent entanglement gates, with the purpose of studying
the variation of the values of the quantum metrics for
each type of entanglement gate and with respect to
the first circuit. Circuits 5 and 6 were introduced as
programmable universal quantum circuits in (Sousa
and Ramos, 2006) and used as quantum autoencoders
in (Romero et al., 2017). Circuits 7 and 8 are part
of the QVECTOR algorithm for quantum error cor-
rection (Johnson et al., 2017) and circuit 9 was intro-
duced as a ”Quantum Kitchen Sinks” quantum ma-
chine learning architecture to be used on NISQ de-
vices in (Wilson et al., 2018). The tenth circuit is
taken from a hardware-efficient quantum architecture
introduced in (Kandala et al., 2017) as a variational
quantum eigensolver, used to find the ground state en-
ergy for molecules. Circuits 11 and 12 are Josephson
samplers defined in (Geller, 2018) , whose purpose is
to embed a vector of real elements into an n-qubits
entangled state. Finally, circuits 13, 14, 15, 18, and
19 were constructed based on the generic model cir-
cuit architecture for classification tasks described in
(Schuld et al., 2020). Circuit 16 and 17 are derived
from circuits 3 and 4, but with the order of the last
two controlled entanglement gates swapped. The pur-
pose was to display the different expressibility values
of circuits 3 and 16 and circuits 4 and 17 and empha-
sise that not only the type, but also the position of the
quantum gates is important in a PQC.
After the trainable PQCs acted on ψ
s
, the expec-
tation value of the states are measured in the compu-
tational basis. The results are fed into a 4x4 linear
layer in the case of the policy function. This linear
layer outputs logits, which when normalised become
the probabilities to choose an action between (left,
down, right, up). This is thus the output of the pol-
icy function π. In the case of the state value function,
the layer post-processing the expectation values has a
4x1 dimension to output only one value for an input
state and to thus successfully model the value func-
tion approximator V . The loss is computed from the
π and V function values and then used to classically
adjust the parameters of the two PQCs accordingly.
This pipeline is shown in Fig. 1.
4 PERFORMANCE OF HQC
MODELS
For each classical and HQC architecture, three ex-
periments were executed. The reward was sampled
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
202
|q
0
⟩
R
X
R
Z
|q
1
⟩
R
X
R
Z
|q
2
⟩
R
X
R
Z
|q
3
⟩
R
X
R
Z
Circuit 1
|q
0
⟩
R
X
R
Z
|q
1
⟩
R
X
R
Z
|q
2
⟩
R
X
R
Z
|q
3
⟩
R
X
R
Z
Circuit 2
|q
0
⟩
R
X
R
Z
R
Z
|q
1
⟩
R
X
R
Z
R
Z
|q
2
⟩
R
X
R
Z
R
Z
|q
3
⟩
R
X
R
Z
Circuit 3
|q
0
⟩
R
X
R
Z
R
X
|q
1
⟩
R
X
R
Z
R
X
|q
2
⟩
R
X
R
Z
R
X
|q
3
⟩
R
X
R
Z
Circuit 4
|q
0
⟩
R
X
R
Z
R
Z
R
Z
R
Z
R
X
R
Z
|q
1
⟩
R
X
R
Z
R
Z
R
Z
R
Z
R
X
R
Z
|q
2
⟩
R
X
R
Z
R
Z
R
Z
R
Z
R
X
R
Z
|q
3
⟩
R
X
R
Z
R
Z
R
Z
R
Z
R
X
R
Z
Circuit 5
|q
0
⟩
R
X
R
Z
R
Z
R
X
R
Z
|q
1
⟩
R
X
R
Z
R
X
R
Z
R
Z
|q
2
⟩
R
X
R
Z
R
Z
R
X
R
Z
|q
3
⟩
R
X
R
Z
R
X
R
Z
Circuit 7
|q
0
⟩
R
X
R
Z
R
X
R
X
R
X
R
X
R
Z
|q
1
⟩
R
X
R
Z
R
X
R
X
R
X
R
X
R
Z
|q
2
⟩
R
X
R
Z
R
X
R
X
R
X
R
X
R
Z
|q
3
⟩
R
X
R
Z
R
X
R
X
R
X
R
X
R
Z
Circuit 6
|q
0
⟩
H
R
X
|q
1
⟩
H
R
X
|q
2
⟩
H
R
X
|q
3
⟩
H
R
X
Circuit 9
|q
0
⟩
R
X
R
Z
R
X
R
X
R
Z
|q
1
⟩
R
X
R
Z
R
X
R
Z
R
X
|q
2
⟩
R
X
R
Z
R
X
R
X
R
Z
|q
3
⟩
R
X
R
Z
R
X
R
Z
Circuit 8
|q
0
⟩
R
Y
R
Z
|q
1
⟩
R
Y
R
Z
R
Y
R
Z
|q
2
⟩
R
Y
R
Z
R
Y
R
Z
|q
3
⟩
R
Y
R
Z
Circuit 11
|q
0
⟩
R
Y
R
Z
|q
1
⟩
R
Y
R
Z
R
Y
R
Z
|q
2
⟩
R
Y
R
Z
R
Y
R
Z
|q
3
⟩
R
Y
R
Z
Circuit 12
|q
0
⟩
R
Y
R
Z
R
Y
R
Z
|q
1
⟩
R
Y
R
Z
R
Y
R
Z
|q
2
⟩
R
Y
R
Z
R
Y
R
Z
|q
3
⟩
R
Y
R
Z
R
Y
R
Z
Circuit 13
|q
0
⟩
R
Y
R
X
R
Y
R
X
|q
1
⟩
R
Y
R
X
R
Y
R
X
|q
2
⟩
R
Y
R
X
R
Y
R
X
|q
3
⟩
R
Y
R
X
R
Y
R
X
Circuit 14
|q
0
⟩
R
Y
R
Y
|q
1
⟩
R
Y
R
Y
|q
2
⟩
R
Y
R
Y
|q
3
⟩
R
Y
R
Y
Circuit 15
|q
0
⟩
R
X
R
Z
R
Z
|q
1
⟩
R
X
R
Z
R
Z
|q
2
⟩
R
X
R
Z
R
Z
|q
3
⟩
R
X
R
Z
Circuit 16
|q
0
⟩
R
X
R
Z
R
X
|q
1
⟩
R
X
R
Z
R
X
|q
2
⟩
R
X
R
Z
R
X
|q
3
⟩
R
X
R
Z
Circuit 17
|q
0
⟩
R
X
R
Z
R
Z
|q
1
⟩
R
X
R
Z
R
Z
|q
2
⟩
R
X
R
Z
R
Z
|q
3
⟩
R
X
R
Z
R
Z
Circuit 18
|q
0
⟩
R
Y
R
Y
|q
1
⟩
R
Y
R
Y
|q
2
⟩
R
Y
R
Y
|q
3
⟩
R
Y
R
Y
Circuit 10
|q
0
⟩
R
X
R
Z
R
X
|q
1
⟩
R
X
R
Z
R
X
|q
2
⟩
R
X
R
Z
R
X
|q
3
⟩
R
X
R
Z
R
X
Circuit 19
Figure 3: All 19 benchmarking quantum circuits, as presented in (Sim et al., 2019). These are the trainable part of the quantum
kernel in the HQC RL solution. The input of each of these circuits is the output state of the basis embedding that encodes the
state of the environment.
Quantum Reinforcement Learning for Solving a Stochastic Frozen Lake Environment and the Impact of Quantum Architecture Choices
203
every 1000 time steps, and every experiment was
ran for a total of 50000 time steps. These results
were smoothed by a moving average over 10 data
points. The error bands are calculated using the stan-
dard error of the reward achieved at a particular time
step across all three experiments for a given architec-
ture. No hyperparameter tuning was performed in this
study due to the prohibitively long training times.
The RL metrics characterizing the performance of
each solution variant are the maximum reward (MR)
achieved during training and the time to convergence
(TTC). The time to convergence is defined as the time
step when the reward stabilises around its highest
point. It is calculated as the first time step where a re-
ward is reached that is not modified by more than 0.2
for all future time steps. The rewards for all quantum
circuits are plotted in Figs. 4 to 8 and detailed in Ta-
ble 1. In general, the HQC solutions and the classical
solutions achieved around the same average MR: the
best value was 0.86 for the classical approach using
four neurons per hidden layer and 0.85 for the HQC
algorithm when considering circuit 6 from Fig. 3.
Both types of solutions were successful and passed
the computed learning threshold of r
thr
= 0.81. Nev-
ertheless, when also considering the number of train-
able parameters, one can see that the HQC approach
only needs a third of the number of trainable param-
eters necessary for the classical one to perform com-
paratively well – 81 compared to 237 trainable param-
eters. Moreover, the TTC is clearly smaller for most
of the variants of HQC variants tested, as shown in
Figs. 4 – 8. The lowest mean TTC is 10330 time
steps for the HQC solution of circuit 2 with 41 train-
able parameters. In order to achieve stabilization that
fast, a classical solution would require 1245 trainable
parameters. Generally, the best HQC solutions were
the ones employing circuits 2, 6, and 10. Circuits 7-19
generally learn faster than the classical solution with a
much higher reward in the first 25000 time steps, but
stabilise afterwards at a lower reward in our tests.
Figure 4: Comparison between the classical NN-based RL
solution and the HQC solutions using PQCs 1 to 4 respec-
tively, smoothed using a moving average.
Figure 5: Comparison between the classical NN-based RL
solution and the HQC solutions using PQCs 3, 4, 16, and
17, smoothed using a moving average.
Figure 6: Comparison between the classical NN-based RL
solution and the HQC solutions using PQCs 5 to 8 respec-
tively, smoothed using a moving average.
Figure 7: Comparison between the classical NN-based RL
solution and the HQC solutions using PQCs 9 to 12 respec-
tively, smoothed using a moving average.
Figure 8: Comparison between the classical NN-based RL
solution and the HQC solutions using PQCs 13 to 19 re-
spectively, smoothed using a moving average.
5 THE DEPENDENCE OF
PERFORMANCE ON
QUANTUM METRICS
The circuits proposed in (Sim et al., 2019) were de-
signed for different purposes and indeed show dis-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
204
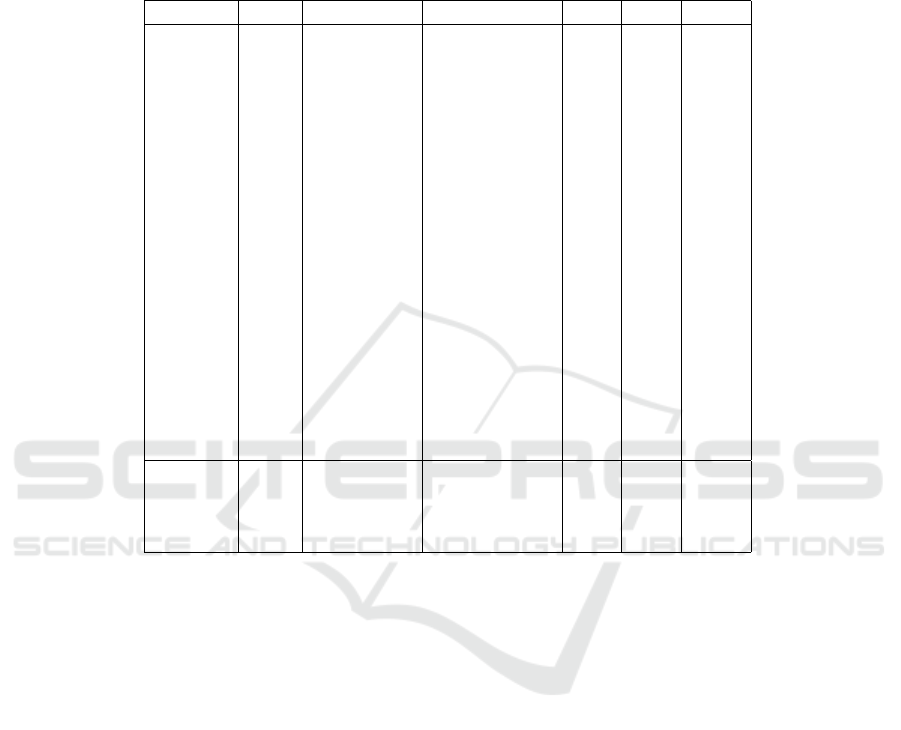
Table 1: The results of all architectures used to solve the FL, evaluated with respect to the MR and the TTC (in thousands
of time steps) obtained during training. The MR and TTC values are obtained from the initial training processes, before the
smoothing that leads to Figs. 4 to 8. We also present the number of the trainable weights of each solution (W), together with
their expressibility (Exp), entanglement capability (Ent), and the effective dimension (ED). The results below are in ascending
order from the best to the worst values of the TTC and are grouped into classical and HQC solutions. For the quantum metrics,
the higher the Ent and ED values, and the lower the Exp values, the better the circuit is in reference to the respective metric.
The degree of correlation between the number of weights W and the MR and TTC of each solution remains for now unclear.
Solution W MR TTC Ent Exp ED
PQC–2 41 0.77 ± 0.16 10.33 ± 7.58 0.81 0.28 3.50
PQC–5 81 0.78 ± 0.22 11.33 ± 3.79 0.41 0.06 6.91
PQC–11 49 0.71 ± 0.20 12.33 ± 5.17 0.73 0.13 5.08
PQC–9 33 0.75 ± 0.02 12.50 ± 1.24 1.00 0.67 3.48
PQC–8 63 0.72 ± 0.08 14.33 ± 10.34 0.39 0.08 6.24
PQC–19 49 0.71 ± 0.07 14.33 ± 12.50 0.59 0.08 6.29
PQC–7 63 0.72 ± 0.06 15.33 ± 16.16 0.33 0.09 5.82
PQC–14 57 0.78 ± 0.25 16.33 ± 7.58 0.66 0.01 7.68
PQC–15 41 0.76 ± 0.28 19.67 ± 16.54 0.82 0.19 4.60
PQC–16 47 0.78 ± 0.09 20.00 ± 25.21 0.35 0.26 3.73
PQC–18 49 0.72 ± 0.10 20.00 ± 26.28 0.44 0.23 3.70
PQC–1 41 0.72 ± 0.10 21.67 ± 10.34 0.00 0.29 3.29
PQC–4 47 0.81 ± 0.18 23.67 ± 14.12 0.47 0.13 5.58
PQC–17 47 0.72 ± 0.09 25.00 ± 9.93 0.4 0.13 5.74
PQC–13 57 0.72 ± 0.08 25.00 ± 53.79 0.61 0.05 7.07
PQC–6 81 0.85 ± 0.16 26.00 ± 4.96 0.78 0.00 7.79
PQC–12 49 0.75 ± 0.19 26.66 ± 27.92 0.65 0.20 4.91
PQC–3 47 0.79 ± 0.06 27.67 ± 48.25 0.34 0.24 3.72
PQC–10 41 0.81 ± 0.27 31.67 ± 14.34 0.54 0.22 3.98
NN–16 1245 0.81 ± 0.10 11.33 ± 3.12 – – 48.78
NN–2 125 0.84 ± 0.04 19.00 ± 15.51 – – 42.53
NN–4 237 0.86 ± 0.00 22.00 ± 5.61 – – 72.13
NN–8 509 0.85 ± 0.02 24.33 ± 6.84 – – 74.83
tinct performances in our tests. Different metrics are
discussed in the literature to describe the power of
specific quantum circuits – comparing to other quan-
tum circuits, but in part also allow the comparison
to alternative classical implementations. It is how-
ever unclear from the literature if these metrics are
correlated with the performance of a QRL model or
not. Therefore, currently indications how a quantum
kernel should be constructed inside a QRL model are
missing. There are in particular three metrics that are
commonly discussed to characterise the properties of
quantum circuits:
1. Expressibility: This metric measures how well a
PQC covers the entire Hilbert space and therefore
indicates if the model would theoretically be able
to learn a target function.
2. Entanglement capability: The power of using
quantum circuits in comparison to classical vari-
ants also arises from the possibility to entangle
qubits, and to therefore strongly correlate them.
One may thus wonder if a higher entanglement
within a PQC leads to an improved performance
of the final model.
3. Effective dimension: The effective dimension
allows a direct comparison of classical NN and
quantum neural networks (QNN) (i.e., PQC) by
interpreting both of them as statistical models
where one can measure the information capac-
ity. It is known (Abbas et al., 2021) that specific
QNNs exhibit a higher effective dimension than
equivalent classical models and that the concerned
QNNs may show a better performance .
In the following, we briefly describe the mathe-
matical definitions of these metrics. Afterwards, we
discuss their correlation with the performance of our
QRL models.
5.1 Expressibility
The expressibility of a circuit (Sim et al., 2019) mea-
sures how well a set of (pure) states, here generated by
the PQC, covers the entire Hilbert space. The precise
calculation is described in (Sim et al., 2019). The cal-
culation uses the Kullback-Leibler (KL) divergence
Quantum Reinforcement Learning for Solving a Stochastic Frozen Lake Environment and the Impact of Quantum Architecture Choices
205

(Kullback and Leibler, 1951) between two distribu-
tions of fidelities. These belong to the Haar ensemble
of random states and respectively to the ensemble of
states generated by the PQC. After having chosen a
PQC architecture, one uniformly samples two param-
eter vectors θ
i
and θ
j
from the entire parameter space
of the PQC. Then the fidelity of their corresponding
states
|
ψ
i
⟩
and
ψ
j
is computed. This process is re-
peated multiple times and the results are afterwards
plotted as a histogram of the probability density func-
tion. For the Haar ensemble, the analytic probability
density function of fidelities is
P
Haar
= (N − 1)(1 −F)
(N−2)
, (1)
where F is the fidelity and N is the dimension of
the Hilbert space. Finally, the KL divergence is cal-
culated from the two histograms and the result is
the D
KL
divergence, whose value is inversely propor-
tional to how expressive the circuit is:
Exp = D
KL
(P
PQC
(F;θ) || P
Haar
(F)). (2)
5.2 Entanglement Capability
In order to quantify the degree of entanglement, the
authors of (Sim et al., 2019) employed the Meyer-
Wallach (MW) entanglement measure (Meyer and
Wallach, 2002). The equation to assess the entangle-
ment capability is
Ent =
1
|S|
∑
θ
i
∈S
Q(
|
ψ
i
⟩
), (3)
where S = {θ
i
} is the set of sampled parameter vec-
tors θ
i
, and Q is the MW measure. It is defined as
Q(
|
ψ
⟩
)
.
=
4
n
n
∑
j=1
D(ι
j
(0)
|
ψ
⟩
, ι
j
(1)
|
ψ
⟩
), (4)
where n is the number of qubits in the system and D
is the generalised distance:
D(
|
u
⟩
,
|
v
⟩
) =
1
2
∑
i, j
|u
i
v
j
− u
j
v
i
|
2
. (5)
The linear mapping ι
j
(b) acts on a quantum basis
state:
ι
j
(b)
|
b
1
. .. b
n
⟩
.
= δ
bb
j
b
1
. .. b
j−1
b
j+1
. .. b
n
, (6)
where the b
j
qubit disappears and δ is the Kronecker-
Delta operator.
5.3 Effective Dimension
The Effective Dimension (ED) characterises both
classical and quantum machine learning models in
terms of their power to generalise and fit to the given
data. It is derived from the Fisher Information Matrix
(FIM), which is a metric in statistics that assesses the
impact of the variance of the parameters of the model
on its output. In our case, it is computed using the
probability p(x, y; θ), which shows the relationship
between the input x ∈ R
s
in
, the output y ∈ R
s
out
, and
the parameters θ. The Riemannian space of the model
parameters is Θ ⊂ R
d
. The FIM is then computed as
F(θ) = E
∂
∂θ
log p(x, y; θ)
∂
∂θ
log p(x, y; θ)
T
,
(7)
where F ∈ R
d×d
. If one uses finite sampling, the FIM
can be approximated empirically to
˜
F
k
(θ) =
1
k
k
∑
j=1
∂
∂θ
log p(x
j
, y
j
; θ)
∂
∂θ
log p(x
j
, y
j
; θ)
T
,
(8)
where k is the number of independent and identi-
cally distributed (i.i.d) samples (x
j
, y
j
) drawn from
p(x, y; θ). The formulation of the ED is based on
(Berezniuk et al., 2020). The authors of (Abbas et al.,
2021) extend this by adding the constant γ ∈ (0, 1] and
a log n term to assure the ED is bounded. This results
in the final form we use in this work:
d
γ,n
(M
Θ
) =
log(
1
V
Θ
R
Θ
q
det(id
d
+
γn
2πlogn
ˆ
F(θ)) dθ)
log(
γn
2πlogn
)
,
(9)
where n > 1 ∈ N is the number of data samples, V
Θ
.
=
R
Θ
dθ is the volume of the parameter space, and
ˆ
F(θ)
is the normalised FIM formulated as:
ˆ
F
i j
(θ) = d
V
Θ
R
Θ
tr(F(θ)) dθ
F
i j
(θ). (10)
5.4 Impact of the Metrics on the
Performance
Values for the expressibility and the entanglement
capability for all considered circuits can be directly
taken from (Sim et al., 2019). The ED in contrast is
calculated by us. These three metrics are displayed in
Table 1 alongside the MR and TTC values, as well as
comparatively plotted in Figs. 9 to 14.
We first observe that circuits 2, 3, and 4 largely
overcome circuit 1 – the circuit with no entanglement
– in MR, as expected. Similarly, circuit 2 performs
significantly better than circuit 3 in the TTC (while
having a similar MR). The expressibility and ED of
the two circuits being comparable, this seems to in-
dicate that the entanglement capacity plays a positive
role in the final performance. It is interesting to note
that circuits 2 and 4 are very similar in structure, while
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
206
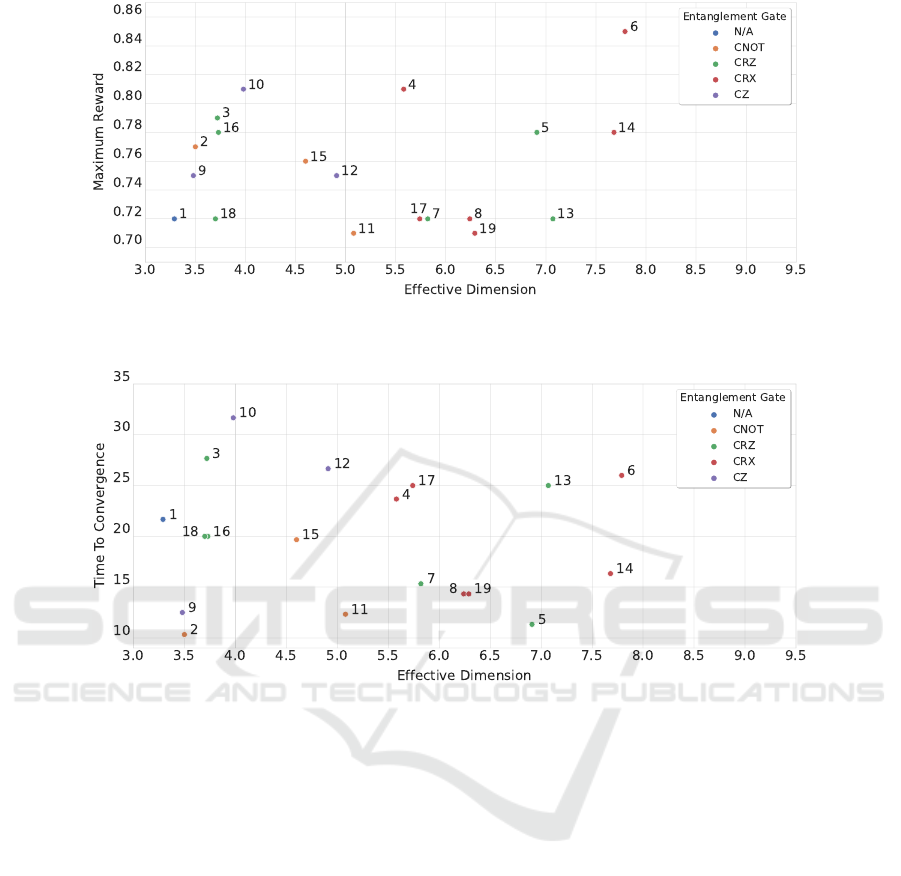
Figure 9: Correlation between the ED of a PQC and the MR obtained by the agent employing it, labeled using the PQC index
and aggregated by the entanglement gate.
Figure 10: Correlation between the ED of a PQC and the TTC obtained by the agent employing it, labeled using the PQC
index and aggregated by the entanglement gate.
circuit 4 containing three more trainable parameters
than circuit 2. The last three gates perform rotations
around the x-axis in case of both circuits. Despite this
similarity, circuit 4 with more trainable parameters re-
sults in a worse performance in the TTC than circuit
2.
When inspecting the performance of further cir-
cuits, we do not observe a clear correlation between
the MR, the TTC, and the values of expressibility,
entanglement capacity, and effective dimension, as
shown in Figs. 9 to 14. For example, the best per-
forming circuit considering the average MR is circuit
6. It also has the best expressibility, the highest ED,
and the fourth highest entanglement capability, which
would seem to indicate a positive correlation. On the
other hand, circuit 13, one of the worse performing
circuits in MR, has a better expressibility, a higher en-
tanglement capability, and a higher effective dimen-
sion than circuit 10, which is, along with circuit 6,
one of the best performing circuits in MR.
In terms of the TTC, we find circuits supporting
the hypothesis that better metrics lead to improved
performance, such as circuit 2 and its large entangle-
ment capacity; as well as counterexamples, such as
circuit 5, which is the second fastest in TTC, but is
overcome in all three metrics by circuit 6 (and with
exactly the same number of trainable parameters).
Additionally, in view of the dissimilar performances
between circuits 3 and 16 as well as circuits 4 and 17,
we deduce that the position of the entangling gates
can impact the performance, which is a factor that is
not considered in the three chosen metrics.
6 CONCLUSIONS
This work presents a hybrid quantum-classical rein-
forcement learning algorithm that successfully solves
a stochastic slippery 4x4 frozen lake example with a
probability of 80% to move into the desired direction
and 20% to move into undesired orthogonal direc-
tions. The algorithms considered achieve a maximum
Quantum Reinforcement Learning for Solving a Stochastic Frozen Lake Environment and the Impact of Quantum Architecture Choices
207
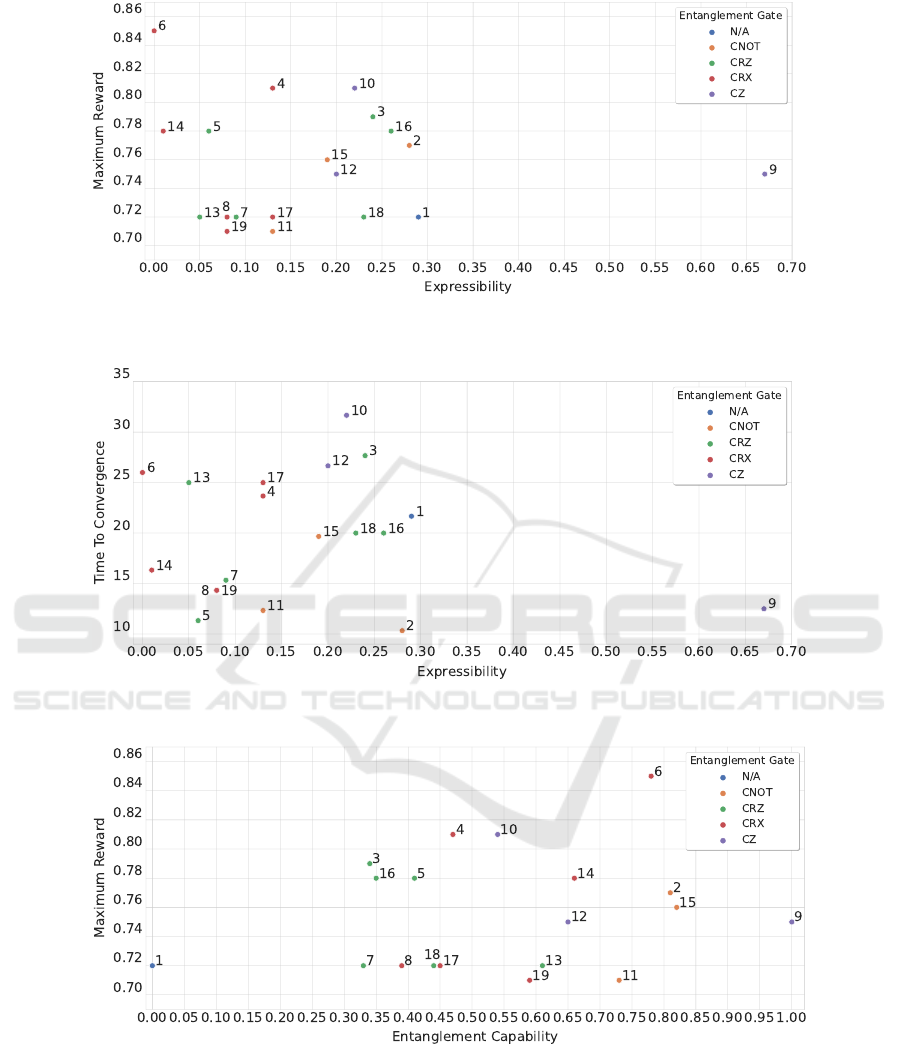
Figure 11: Correlation between the expressibility of a PQC and the MR obtained by the agent employing it, labeled using the
PQC index and aggregated by the entanglement gate.
Figure 12: Correlation between the expressibility of a PQC and the TTC obtained by the agent employing it, labeled using
the PQC index and aggregated by the entanglement gate.
Figure 13: Correlation between the entanglement capability of a PQC and the MR obtained by the agent employing it, labeled
using the PQC index and aggregated by the entanglement gate.
reward comparable to classical solutions while only
requiring a third of the number of trainable parame-
ters and also converging faster. In constructing the hy-
brid quantum-classical RL model, the internal policy
of the agent was replaced by a parametrised quantum
circuit. Different architectures were considered for
the parametrised quantum circuit. We found that three
of the hybrid quantum-classical variants solve the en-
vironment. We examined if this performance could
be explained by the quantum-specific metrics like ex-
pressibility, entanglement capability, or the effective
dimension. The latter is particularly interesting since
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
208
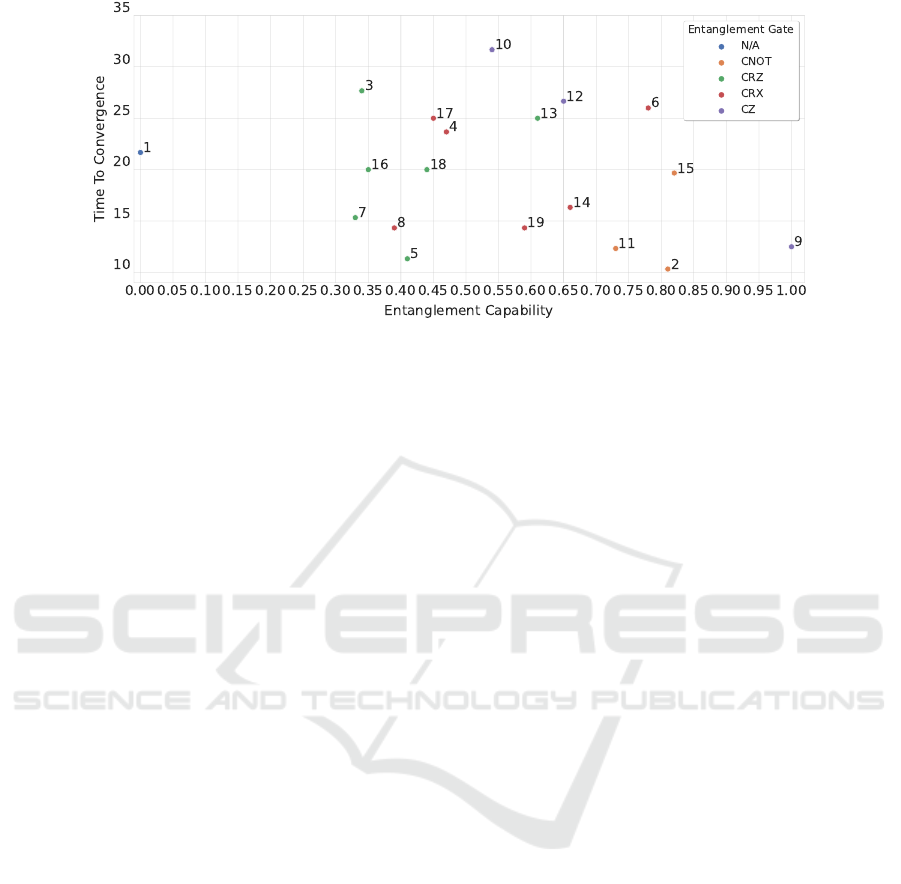
Figure 14: Correlation between the entanglement capability of a PQC and the TTC obtained by the agent employing it, labeled
using the PQC index and aggregated by the entanglement gate.
it allows the comparison of classical and quantum-
classical architectures. We find however that the per-
formance is not directly linked to these metrics, which
could be because some additional factors influencing
the performance were missed by this study. There-
fore, presently the question on which parametrised
quantum circuit to use inside a RL model can only
be answered empirically.
Future work has to explore multiple directions.
First, this work only considered the simple basis en-
coding, but it will be interesting to investigate the
impact of different encoding techniques on the per-
formance metrics. Furthermore, the PPO algorithm
could be replaced by a simpler policy gradient one,
where the contribution of the quantum kernel to the
solution could possibly be better observed. Addition-
ally, so far, the work was done using only simula-
tions, without any attempts yet to run the algorithms
on quantum hardware. This was due to long wait-
ing times and a high number of iterations required be-
tween quantum hardware and classical systems. An
orthogonal research direction is to consider more so-
phisticated environments towards more realistic use
cases and situations and to therefore bring QRL tech-
niques closer to application.
ACKNOWLEDGEMENTS
The research is part of the Munich Quantum Valley,
which is supported by the Bavarian state government
with funds from the Hightech Agenda Bayern Plus.
REFERENCES
Abbas, A., Sutter, D., Zoufal, C., Lucchi, A., Figalli, A.,
and Woerner, S. (2021). The power of quantum neural
networks. Nature Computational Science, 1(6):403–
409.
Anis, M. S., Abby-Mitchell, Abraham, H., AduOffei, Agar-
wal, R., Agliardi, G., et al. (2021). Qiskit: An open-
source framework for quantum computing.
Berezniuk, O., Figalli, A., Ghigliazza, R., and Musaelian,
K. (2020). A scale-dependent notion of effective di-
mension. arXiv preprint arXiv:2001.10872.
Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., and and Zaremba, W. (2016).
Openai gym.
Caro, M. C., Huang, H.-Y., Cerezo, M., Sharma, K., Sorn-
borger, A., Cincio, L., and Coles, P. J. (2022). Gener-
alization in quantum machine learning from few train-
ing data. Nature communications, 13(1):1–11.
Ceron, J. S. O. and Castro, P. S. (2021). Revisiting rainbow:
Promoting more insightful and inclusive deep rein-
forcement learning research. In International Confer-
ence on Machine Learning, pages 1373–1383. PMLR.
Chen, S. Y.-C., Yang, C.-H. H., Qi, J., Chen, P.-Y., Ma,
X., and Goan, H.-S. (2020). Variational quantum cir-
cuits for deep reinforcement learning. IEEE Access,
8:141007–141024.
Christiano, P., Shah, Z., Mordatch, I., Schneider, J., Black-
well, T., Tobin, J., Abbeel, P., and Zaremba, W.
(2016). Transfer from simulation to real world
through learning deep inverse dynamics model. arXiv
preprint arXiv:1610.03518.
Gawłowicz, P. and Zubow, A. (2019). Ns-3 meets openai
gym: The playground for machine learning in net-
working research. In Proceedings of the 22nd In-
ternational ACM Conference on Modeling, Analysis
and Simulation of Wireless and Mobile Systems, pages
113–120.
Geller, M. R. (2018). Sampling and scrambling on a chain
Quantum Reinforcement Learning for Solving a Stochastic Frozen Lake Environment and the Impact of Quantum Architecture Choices
209

of superconducting qubits. Physical Review Applied,
10(2):024052.
Grover, L. K. (1996). A fast quantum mechanical algorithm
for database search. In Proceedings of the twenty-
eighth annual ACM symposium on Theory of comput-
ing, pages 212–219.
Gupta, A., Roy, P. P., and Dutt, V. (2021). Evaluation
of instance-based learning and q-learning algorithms
in dynamic environments. IEEE Access, 9:138775–
138790.
Harrow, A. W., Hassidim, A., and Lloyd, S. (2009). Quan-
tum algorithm for linear systems of equations. Physi-
cal review letters, 103(15):150502.
Heimann, D., Hohenfeld, H., Wiebe, F., and Kirch-
ner, F. (2022). Quantum deep reinforcement learn-
ing for robot navigation tasks. arXiv preprint
arXiv:2202.12180.
Jerbi, S., Gyurik, C., Marshall, S., Briegel, H., and Dunjko,
V. (2021). Parametrized quantum policies for rein-
forcement learning. Advances in Neural Information
Processing Systems, 34:28362–28375.
Johnson, P. D., Romero, J., Olson, J., Cao, Y., and Aspuru-
Guzik, A. (2017). Qvector: an algorithm for device-
tailored quantum error correction. arXiv preprint
arXiv:1711.02249.
Kandala, A., Mezzacapo, A., Temme, K., Takita, M.,
Brink, M., Chow, J. M., and Gambetta, J. M. (2017).
Hardware-efficient variational quantum eigensolver
for small molecules and quantum magnets. Nature,
549(7671):242–246.
Khadke, A., Agarwal, A., Mohseni-Kabir, A., and Schwab,
D. (2019). Exploration with expert policy advice.
Kullback, S. and Leibler, R. A. (1951). On information
and sufficiency. The annals of mathematical statistics,
22(1):79–86.
Liu, Y., Arunachalam, S., and Temme, K. (2021). A rig-
orous and robust quantum speed-up in supervised ma-
chine learning. Nature Physics, 17(9):1013–1017.
Lockwood, O. and Si, M. (2020). Reinforcement learn-
ing with quantum variational circuit. In Proceedings
of the AAAI Conference on Artificial Intelligence and
Interactive Digital Entertainment, volume 16, pages
245–251.
Meyer, D. A. and Wallach, N. R. (2002). Global entangle-
ment in multiparticle systems. Journal of Mathemati-
cal Physics, 43(9):4273–4278.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing. arXiv preprint arXiv:1312.5602.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., et al. (2015). Human-level
control through deep reinforcement learning. nature,
518(7540):529–533.
Niraula, D., Jamaluddin, J., Matuszak, M. M., Haken, R.
K. T., and Naqa, I. E. (2021). Quantum deep rein-
forcement learning for clinical decision support in on-
cology: application to adaptive radiotherapy. Scien-
tific reports, 11(1):1–13.
P
´
erez-Salinas, A., Cervera-Lierta, A., Gil-Fuster, E., and
Latorre, J. I. (2020). Data re-uploading for a universal
quantum classifier. Quantum, 4:226.
Popova, M., Isayev, O., and Tropsha, A. (2018). Deep rein-
forcement learning for de novo drug design. Science
advances, 4(7):eaap7885.
Raffin, A., Hill, A., Gleave, A., Kanervisto, A., Ernestus,
M., and Dormann, N. (2021). Stable-baselines3: Reli-
able reinforcement learning implementations. Journal
of Machine Learning Research.
Romero, J., Olson, J. P., and Aspuru-Guzik, A. (2017).
Quantum autoencoders for efficient compression of
quantum data. Quantum Science and Technology,
2(4):045001.
Schuld, M., Bocharov, A., Svore, K. M., and Wiebe, N.
(2020). Circuit-centric quantum classifiers. Physical
Review A, 101(3):032308.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms. arXiv preprint arXiv:1707.06347.
Sim, S., Johnson, P. D., and Aspuru-Guzik, A. (2019).
Expressibility and entangling capability of parame-
terized quantum circuits for hybrid quantum-classical
algorithms. Advanced Quantum Technologies,
2(12):1900070.
Sousa, P. B. and Ramos, R. V. (2006). Universal quantum
circuit for n-qubit quantum gate: A programmable
quantum gate. arXiv preprint quant-ph/0602174.
Steckelmacher, D., Plisnier, H., Roijers, D. M., and Now
´
e,
A. (2019). Sample-efficient model-free reinforce-
ment learning with off-policy critics. In Joint Euro-
pean Conference on Machine Learning and Knowl-
edge Discovery in Databases, pages 19–34. Springer.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An introduction. MIT press.
Van Hasselt, H., Guez, A., and Silver, D. (2016). Deep re-
inforcement learning with double q-learning. In Pro-
ceedings of the AAAI conference on artificial intelli-
gence, volume 30.
Wilson, C., Otterbach, J., Tezak, N., Smith, R., Polloreno,
A., Karalekas, P. J., Heidel, S., Alam, M. S., Crooks,
G., and da Silva, M. (2018). Quantum kitchen sinks:
An algorithm for machine learning on near-term quan-
tum computers. arXiv preprint arXiv:1806.08321.
Zhu, Y., Mottaghi, R., Kolve, E., Lim, J. J., Gupta, A., Fei-
Fei, L., and Farhadi, A. (2017). Target-driven visual
navigation in indoor scenes using deep reinforcement
learning. In 2017 IEEE international conference on
robotics and automation (ICRA), pages 3357–3364.
IEEE.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
210
