Automatic Fracture Detection and Characterization in Borehole Images
Using Deep Learning-Based Semantic Segmentation
Andrei Baraian
1
, Vili Kellokumpu
1
, R
¨
aty Tomi
1
and Leena Kallio
2
1
VTT Technical Research Centre of Finland, Kaitov
¨
ayl
¨
a 1, Oulu, Finland
2
Astrock Oy, Ahventie 4, Espoo, Finland
fi
Keywords:
Semantic Segmentation, Borehole Analysis, DeepLab, Deep Neural Networks.
Abstract:
Fracture analysis represents one of the key investigations that needs to be carried in borehole logs. Identifying
fractures, as well as other similar features (like breakouts or foliations) is essential for characterizing the
reservoir where the drilling took place. However, identifying and characterizing the fractures from borehole
images is a very time and resource consuming task, that require extensive knowledge from geological experts.
For this reason, developing semi-automated or automated tools would facilitate and increase the productivity
of fracture analysis, since even for one reservoir, experts need to analyze and interpret hundreds of meters of
borehole images. This paper presents a deep learning based approach for application of automatic fracture
detection and characterization in borehole images, relying on state-of-the-art convolutional neural network for
accurate semantic segmentation of fractures. Target images consists of color borehole images, as opposed to
acoustic or drill-core images, and uses real world data, both for training the deep learning model and testing
the whole system. The system is evaluated by using multiple metrics and the final outputs of the system are
the parameters of the sinusoids that define the predicted fractures.
1 INTRODUCTION
An important part of borehole geophysics is the anal-
ysis and interpretation of logged measurements for
determining the physical properties of wells or test
holes. Specific events, such as natural fractures, bed-
dings or foliations approximate the underlying struc-
ture of the soil and offer valuable information, de-
pending on the scope of the borehole. For exam-
ple, micro-fractures in shale allow for identifying the
main route for hydrocarbon, which is a clear indica-
tor of oil or gas reservoirs (Carey et al., 2015). Im-
age well logging is one of the most used technique
for borehole analysis in our days, and can be imple-
mented in several ways, obtaining electrical, acous-
tic, or optical images of the borehole. Another pop-
ular method of analysing fractures is extracting the
drill-core and imaging it at ground-level, using spe-
cialized hardware for rolling the core. Although the
obtained images are quite similar in terms of content,
imaging in borehole is more difficult due to limited
illumination configurations, poor imaging conditions
in the presence of mud or sediments and prone to im-
age artefacts from camera motion. In our work, the
primary focus is on RGB borehole images captured
by cameras, but it is possible to transfer our algorithm
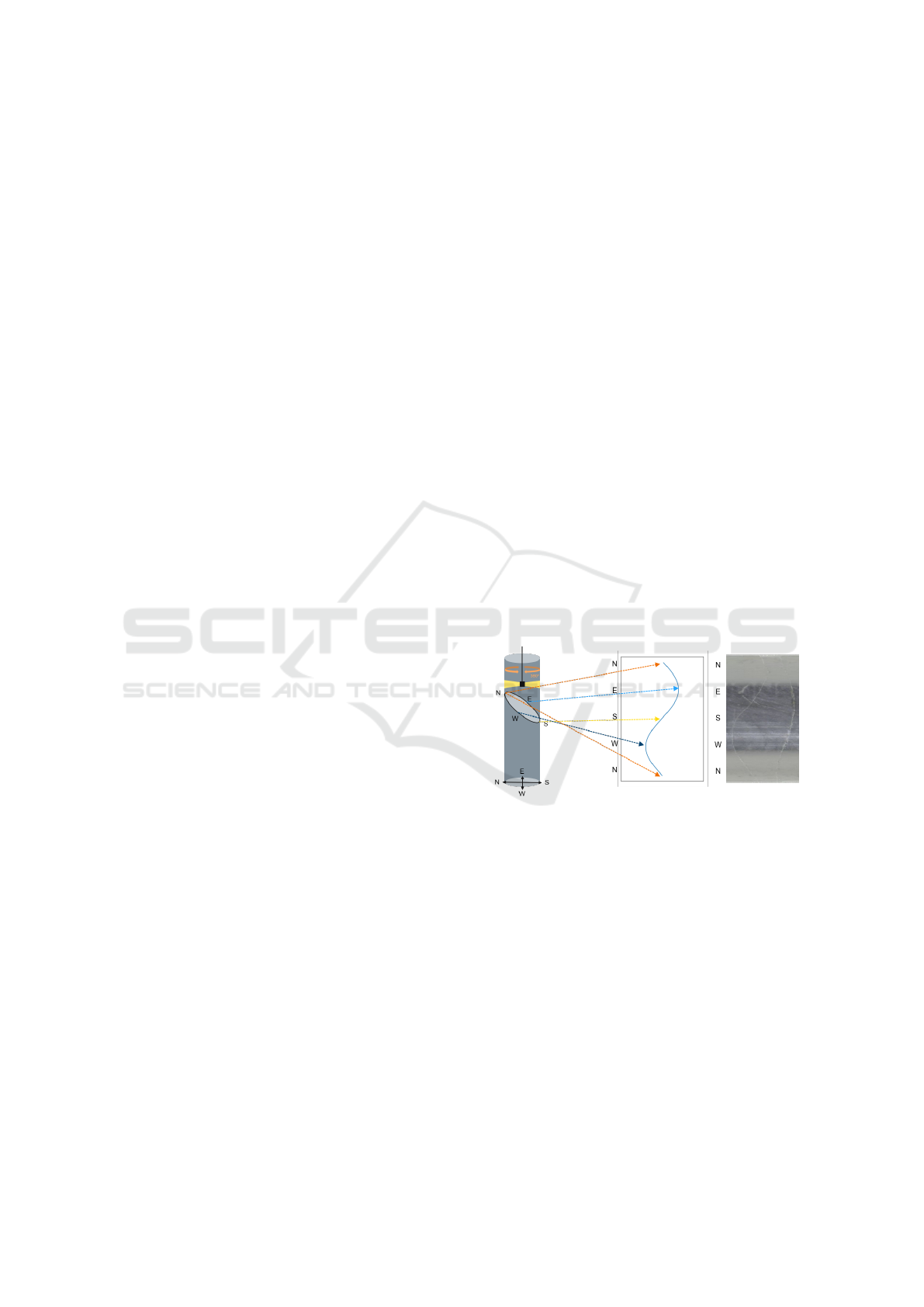
Figure 1: Borehole imaging concept. Fractures in the 3D
world are represented as planes cutting through a section
of the borehole, generating sinusoid-shaped curves in the
unrolled 2D images.
to acoustic or electrical images (Wedge et al., 2015),
since the images have a high degree of similarity, even
though acquisition methods are different.
To measure and analyse the borehole, a probe
is lowered into the borehole and images are contin-
uously captured with a wide FOV (Field-of-View)
camera. Images can then be unrolled and stitched to-
gether to retrieve a 2D image representation of the in-
ner surface of a borehole. Due to the cylindrical shape
of the borehole, planar features such as fractures and
beddings will be represented as sinusoidal curves in
the unrolled 2D image, as depicted in Fig. 1. Since
one borehole can have several hundreds of meters in
856
Baraian, A., Kellokumpu, V., Tomi, R. and Kallio, L.
Automatic Fracture Detection and Characterization in Borehole Images Using Deep Learning-Based Semantic Segmentation.
DOI: 10.5220/0011673100003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
856-863
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

depth, manually analyzing all the images easily be-
comes a laborious and time-consuming task for geol-
ogists. Our proposed solution is an automated system,
capable of accurately and robustly detecting fractures
from borehole images and characterizing them at the
same time in borehole space parameters. Our solution
is developed with data from an existing real world ap-
plication where fractures are manually annotated with
sinusoid parameters. The system is built in such a
way to allow experts to set specific confidence score
thresholds if more detections are needed.
There are two main approaches for solving frac-
ture detection: traditional image processing tech-
niques combined with pattern recognition, and newer
approaches based on Deep Neural Networks (DNNs)
(Chen et al., 2018). A generic pipeline for fracture
detection consists of two stages: segmenting fracture
pixels from the background pixels, and then approx-
imating the models of the curves describing the frac-
tures. We have identified the bottleneck of this system
as being the segmentation stage. High quality frac-
ture masks make the fitting easy, however in practice
it is exceptionally hard to perfectly segment fractures
due to their variability in width, texture, contrast and
shape, which forces us to design more complex fit-
ting algorithms. Using traditional image processing
techniques, it is very hard and in some cases impos-
sible to derive the perfect combination of filtering op-
erations capable of robustly segmenting the fractures.
Even methods relying on more advanced algorithms,
such as K-means or kNN clustering are having prob-
lems with deep boreholes where color intensity distri-
butions vary a lot. Nonetheless, recent advances in
deep learning architectures, especially the ones de-
veloped for the task of semantic segmentation, are
proving to achieve remarkable accuracy, robustness
and performance in scene understanding and classifi-
cation, being successfully applied in domains such as
autonomous driving, optical quality inspection, robot
navigation, etc. (Li et al., 2021; Tabernik et al., 2019).
This serves as inspiration in our work for choosing
DeepLabv3+ (Chen et al., 2018) for the semantic seg-
mentation of fractures.
2 RELATED WORK
Detailed characterisation of borehole features, such as
fractures, beddings, foliations, etc. can greatly bene-
fit from the automatization of borehole analysis. Al-
though the research in this domain is still in its begin-
nings, there are several works that have further pushed
the state-of-the-art in borehole analysis and interpre-
tation.
Although the focus in this paper is on optical im-
ages captured with color cameras, techniques devel-
oped for acoustic or resistivity images can be ap-
plied as well. One of the earlier methods proposed
by Thapa et al. (Thapa et al., 1997) was relying on
computing an edge map and searching for sinusoid
candidates by applying the Hough transform. Along
the same direction with subtle differences, (Glossop
et al., 1999), (Zhang and Xiao, 2009), and (Hall et al.,
1996) have applied Hough transform for sinusoid fit-
ting. One of the major drawbacks of HT-based imple-
mentations is the high computational cost since it is a
brute-force method. In (Moran et al., 2020), the au-
thors aim to overcome this limitation by performing
a heuristic search instead of an exhaustive one and
leverage the Iterated Local Search (ILS) algorithm.
Other geometric transformations have also been ap-
plied, such as (van Ginkel et al., 2003), where a gen-
eral Radon transform is applied. These methods are
identifying features that represent fractures, and then
by using the geometric transforms, votes are accu-
mulated from each feature and the parameter values
with highest support are selected to be the sinusoids.
An interesting approach by D. Wedge et al.(Wedge
et al., 2015) first highlights regions in the hole most
suitable for automated fracture analysis based on an
image complexity (quality) measure, arguing that im-
ages with a high degree of noise may be ignored even
in the manual labeling process. Their method is im-
plemented both for acoustic televiewer and optical
televiewer, with the only difference of changing the
complexity function.
Recently, methods which leverage the latest ad-
vancements in machine learning (ML) are being suc-
cessfully applied for fracture detection. In (Anatoli
Quintanilla Cruz et al., 2017), although the Hough
transform is still applied for getting all possible candi-
dates, there is an additional step which consists of the
candidates going through a convolutional neural net-
work for validation or exclusion. Dias et al. (Dias
et al., 2020) pave the way towards end-to-end sys-
tems for fracture and breakouts analysis, by utilizing
Fast-RCNN (Girshick, 2015) network to identify frac-
tures and breakouts. To overcome the challenge of
limited data, they generate synthetic data of fractures
and breakouts and train the model using this data. Al-
though they reach a 98% area under ROC curve in
the case of testing on the simulated data, when tested
on real images, the system’s performance drops sig-
nificantly. Moreover, only identifying fractures is not
enough for a complete autonomous system for bore-
hole analysis, as fractures need to be characterized
in terms of borehole parameters such as depth, dip
and dip direction. Developed simultaneously with our
Automatic Fracture Detection and Characterization in Borehole Images Using Deep Learning-Based Semantic Segmentation
857

work, some ideas from (Alzubaidi et al., 2022) are
quite similar to ours, although there are key differ-
ences both in the system design and implementation.
In terms of imaging, they are using unwrapped core
images whereas we use borehole images. To com-
bine the fracture segmentation and instance detection,
they are using Mask R-CNN (He et al., 2017) network
for instance segmentation of fractures. Although the
approach works for the general case and manages to
jointly segment and separate each fracture instance,
some extreme cases where fractures have a high am-
plitude might cause problems. After obtaining the
mask of the fracture, the next step consists in skele-
tonizing the fracture, so that the fracture has a width
of just one pixel, allowing for better and faster curve
fitting. We employ the same idea, however, we per-
form joint separation where multiple fractures might
intersect, enabling us to fit multiple configurations of
sinusoids, accounting for sinusoids with high ampli-
tudes as well.
3 DATA
The development and testing of this work was car-
ried on three separate datasets, each depicting images
from three different boreholes. The data and anno-
tations are both from a real world application. The
resolution of the images was 720x2000 pixels and 1
meter of the borehole was comprised in one image.
Each borehole had around 200-300 meters in depth,
resulting in 200-300 images per dataset. The anno-
tation of fractures was provided in a separate file for
each dataset, having the fractures specified as sinu-
soids in borehole parameters, hence a conversion to
image space was needed in order to generate ground-
truth masks. For each dataset, the data was split in
training, validation and testing splits with a ratio of
60-20-20 % out of all the images present in a dataset.
Consequently, to characterize the predicted sinusoids,
it is necessary to perform the inverse operation, from
image space to borehole parameters. Because frac-
tures are of different widths, empirically a width of 10
pixels was chosen as the default width of the ground-
truth. In practice, the observed fractures are not ex-
actly sinusoids and in borehole images the sinusoid
is often only partially visible. Accurate pixel level
annotations would be ideal for training the semantic
segmentation but annotating data in pixel level is not
feasible in the target application. Therefore we fo-
cus our study to the use of parametric sinusoid labels
produced in the current manual workflow of the ap-
plication. We think this is a decent tradeoff, as manu-
ally labelling and correcting fractures would be infea-
sible in real world use. The problem is formulated as
a two-class semantic segmentation problem, with the
classes of fracture and background. Fig. 2 shows im-
ages from the three boreholes from where one can see
the big variation in terms of texture. Other challenges
in the image data include low level artifacts due to
borehole image computation from camera images and
wide vertical line segments where water blocks the
borehole texture as seen in Fig 2.
Figure 2: Example images from boreholes.
4 METHOD
Our proposed method relies on two important stages:
fracture detection using convolutional neural net-
works for semantic segmentation and sinusoid fitting
on detected fractures. The developed system is aimed
at not only detection of fractures, but also accurate
identification and characterization of each fracture.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
858
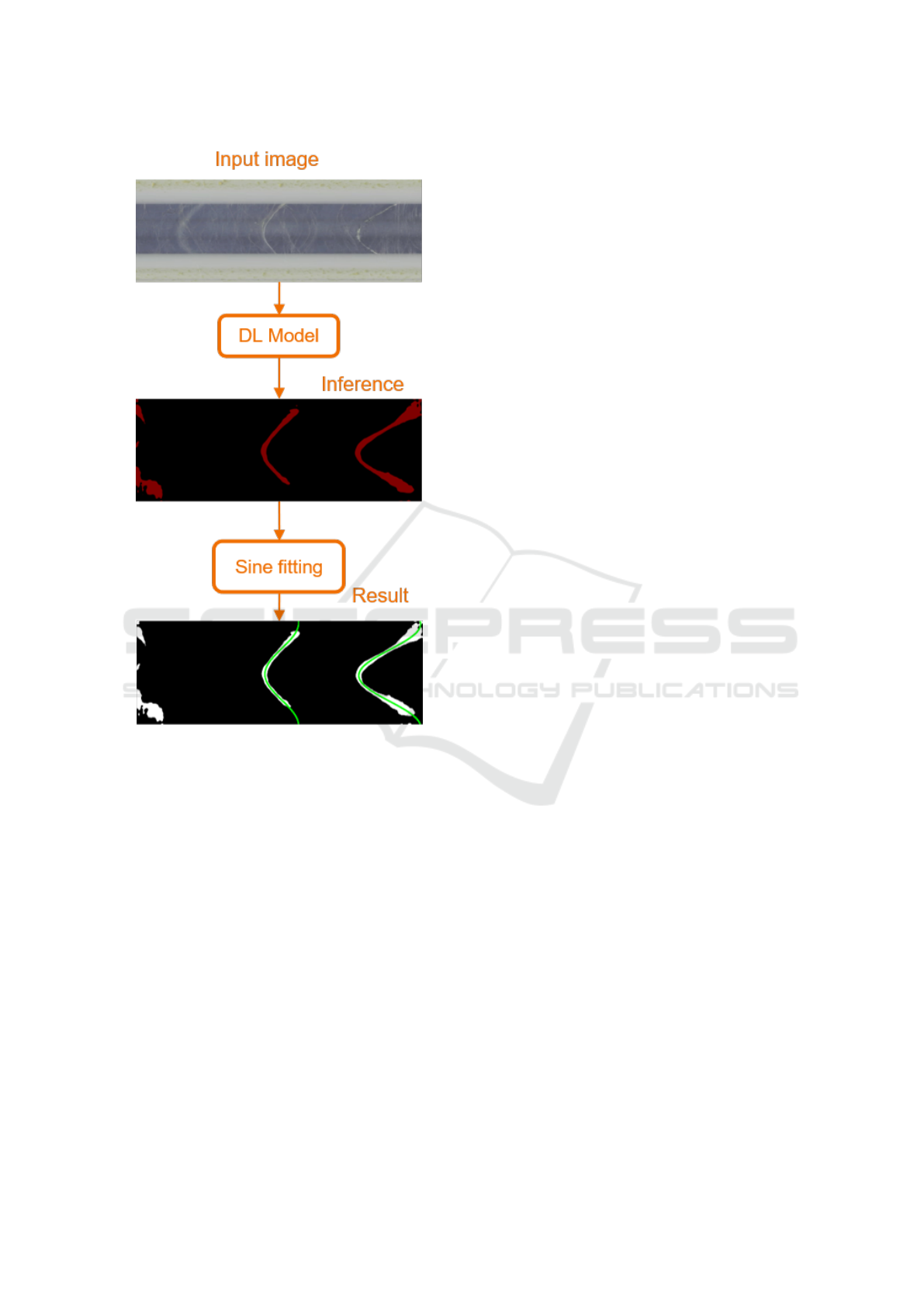
Figure 3: Workflow overview. Semantic segmentation and
sinusoid fitting are the two main components of the system.
4.1 Semantic Segmentation
DeepLab is a state-of-the-art Deep Convolutional
Neural Network (DCNN) framework developed by
Chen et al. (Chen et al., 2018) for the task of se-
mantic segmentation in images. The first version of
the framework (Chen et al., 2015) proposed the us-
age of atrous convolutions and fully connected Condi-
tional Random Fields (CRF) for overcoming the low
accuracy in accurate object segmentation. By com-
bining the final DCNN layer with the fully connected
CRF, the model is able to bypass the invariance prop-
erties of DCNNs, allowing for increased accuracy in
segmentation. Last iteration of the framework (Chen
et al., 2018) introduces a decoder module for the pur-
pose of refining the segmentation results, especially
along the object boundaries. The work is inspired
by combining the advantages from the spatial pyra-
mid pooling module and the encoder-decoder struc-
ture, both heavily used in the semantic segmentation
task. Moreover, the authors adapt the Aligned Xcep-
tion model (Chollet, 2017) for the semantic segmen-
tation task and apply depthwise separable convolution
to both the ASPP and decoder module.
For the training procedure, we have used the pre-
trained Xception model from the authors’ repository
and fine-tuned on our training data, for each dataset.
The Xception backbone is initially pre-trained on
ImageNet-1k dataset (Russakovsky et al., 2015) and
then the DeepLabv3+ model is further pre-trained on
MS-COCO dataset (Lin et al., 2014) and on PAS-
CAL VOC 2012 (Everingham et al., ), for which
the evaluation is also performed. Because we are
more interested in achieving higher accuracy rather
than real-time performance, we drop the experimen-
tation on MobileNetV2 (Sandler et al., 2018) and Mo-
bileNetV3 (Howard et al., 2019). We run the model
with an output stride of 16, hence the atrous rates are
[6, 12, 18]. Due to the large image size, we are train-
ing with a batch size of 1 image. For fine-tuning,
all trained weights are used, except the logits, since
the number of classes is different than in PASCAL
dataset.
Because the density of fractures in a borehole is
quite low, as well as the total number of fractures,
there is a high class imbalance between the fracture
class and the background class. To alleviate this prob-
lem, class weights have been calculated using 1 and
applied in the training procedure.
W
j
= N
s
/(N
cls
∗ N
s j
), (1)
where N
s
is the total number of samples, N
cls
is the
number of classes and N
s j
represents the number of
samples from class j. The calculated weights are then
used in the model’s loss function.
4.2 Sinusoid Fitting
After getting the masks of possible fractures, the next
goal is to fit sinusoid curves to these masks, so that
fractures are characterised by curve parameters. The
main steps for fracture identification consist in the fol-
lowing steps: skeletonization of the predicted frac-
ture masks, separation of fracture intersection points
(joints), connected components labelling of indepen-
dent fracture segments and brute-force sinusoid fit-
ting of multiple independent skeletons. The output
of the semantic segmentation inference consists of a
masked image of the identified pixels representing a
fracture. However, due to imperfections in segmen-
tation, direct fitting on the predicted masks performs
poorly, both in accuracy and computation time. By
skeletonizing the fracture masks, their width is de-
Automatic Fracture Detection and Characterization in Borehole Images Using Deep Learning-Based Semantic Segmentation
859
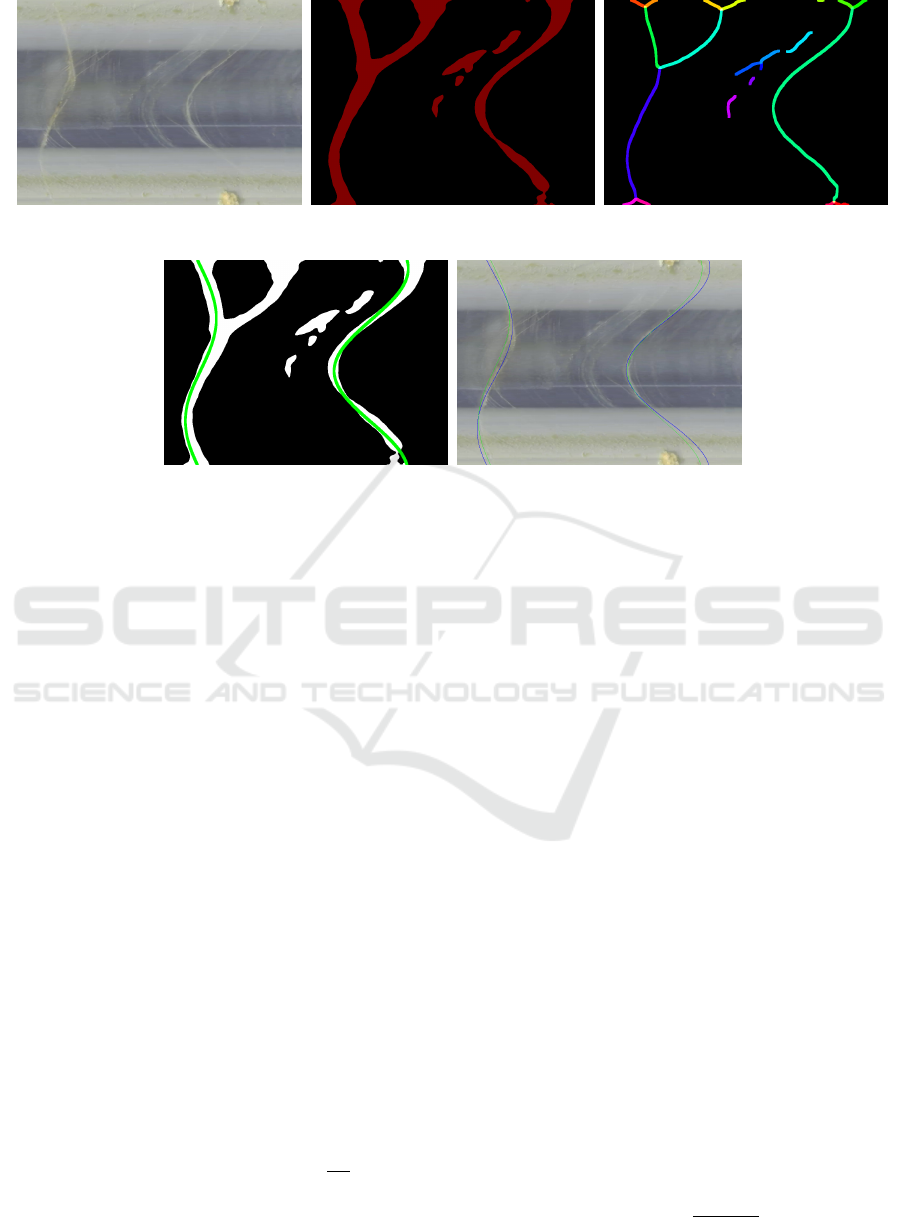
(a) (b) (c)
(d) (e)
Figure 4: Processing pipeline. (a) Original image. (b) Semantic segmentation of fractures. (c) Fracture mask is skeletonized,
joints (intersections of fractures) are removed and independent fracture segments are labelled. (d) Fitted sinusoids on the
mask. (e) Sinusoids overlaied on the original image. Blue - GT sinusoids, Green - Detected sinusoids.
creased, however the shape information is still pre-
served and the number of sample points for the sinu-
soid fitting is significantly reduced. The skeleton will
have a width of 1 pixel. Furthermore, joints in the
skeleton are identified and removed, using a simple
heuristic based on the number of neighbours. Joint
points are detected if there are at least 4 neigbours in
an 8-neighborhood region. After the joint points are
removed from the skeletons, a connected component
labeling algorithm is performed, and each individual
skeleton is segmented. Smallest skeleton-fractures
are removed and then a brute-force approach is used
to create pairs of skeleton-fractures. The fitting is per-
formed on the fracture pair, as well as considering
independently each one of the fractures, to account
for the case where only one skeleton-fracture defines
the whole fracture. To limit the redundant cases, we
match skeleton-fractures with fractures which are not
on the same horizontal level. The fitting problem is
modeled as a simple curve fitting problem in the im-
age space. We assume the case of a vertical borehole,
hence we can approximate the shape of the fractures
with a sinusoid curve, having the following equation:
y = A ∗ sin(B ∗ (x + H))+V, (2)
where A is the amplitude of the sinusoid,
2∗π
B
is the pe-
riod, although for our case we know that the fractures
are sinusoids having only one period, so B=1 for our
case, H is the phase shift and V is the (depth) verti-
cal shift. The fitting is performed by using SciPy’s
non-linear least squares optimization library (Virta-
nen et al., 2020). We are using the Levenberg-
Marquardt algorithm without any bounds added. As
in any unconstrained optimization problem, we need
to estimate an initial guess. For the amplitude and
phase shift, we initialise them with a value of 1 and
for the vertical shift, we calculate the histogram of the
mask on columns and pick the location of the maxi-
mum value as the first guess for the vertical shift.
Once the fitting is done and all plausible sinu-
soids have been computed, we run a Non-Maximal
Suppression (NMS) on the detected sinusoids to dis-
card overlapping instances. The detected sinusoid has
only 1 pixel width, hence it’s width is increased by a
fixed amount to account for robustness and overlayed
on the initial masks generated by the segmentation,
from where a confidence score is derived, based on
the overlapping between the detected sinusoid and the
generated mask. Then, in a greedy way, only the best
sinusoids are retained.
Ultimately, the detected sinusoids parameters are
converted from the image-space into the borehole
space, in terms of dip angle, dip direction and frac-
ture depth. To calculate the dip angle, the following
equation is used:
ω = arctan(
D
D
2
− D
1
), (3)
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
860
where ω is the dip angle, D represents the diameter
of the borehole, D
2
is the depth of the upper angle
and D
1
is the depth of the lower angle. The dip di-
rection is easily computed by identifying the smaller
angle of the amplitudes and converting it from pixels
to degrees.
5 EXPERIMENTAL RESULTS
To assess the performance of our system, a multi-
tude of metrics have been applied, to ensure reli-
able measurements. The performance of the semantic
segmentation model can be established by using the
mIoU metric, however this is heavily dependent on
the ground-truth masks, which were obtained by plot-
ting the sinusoids with a fixed width.
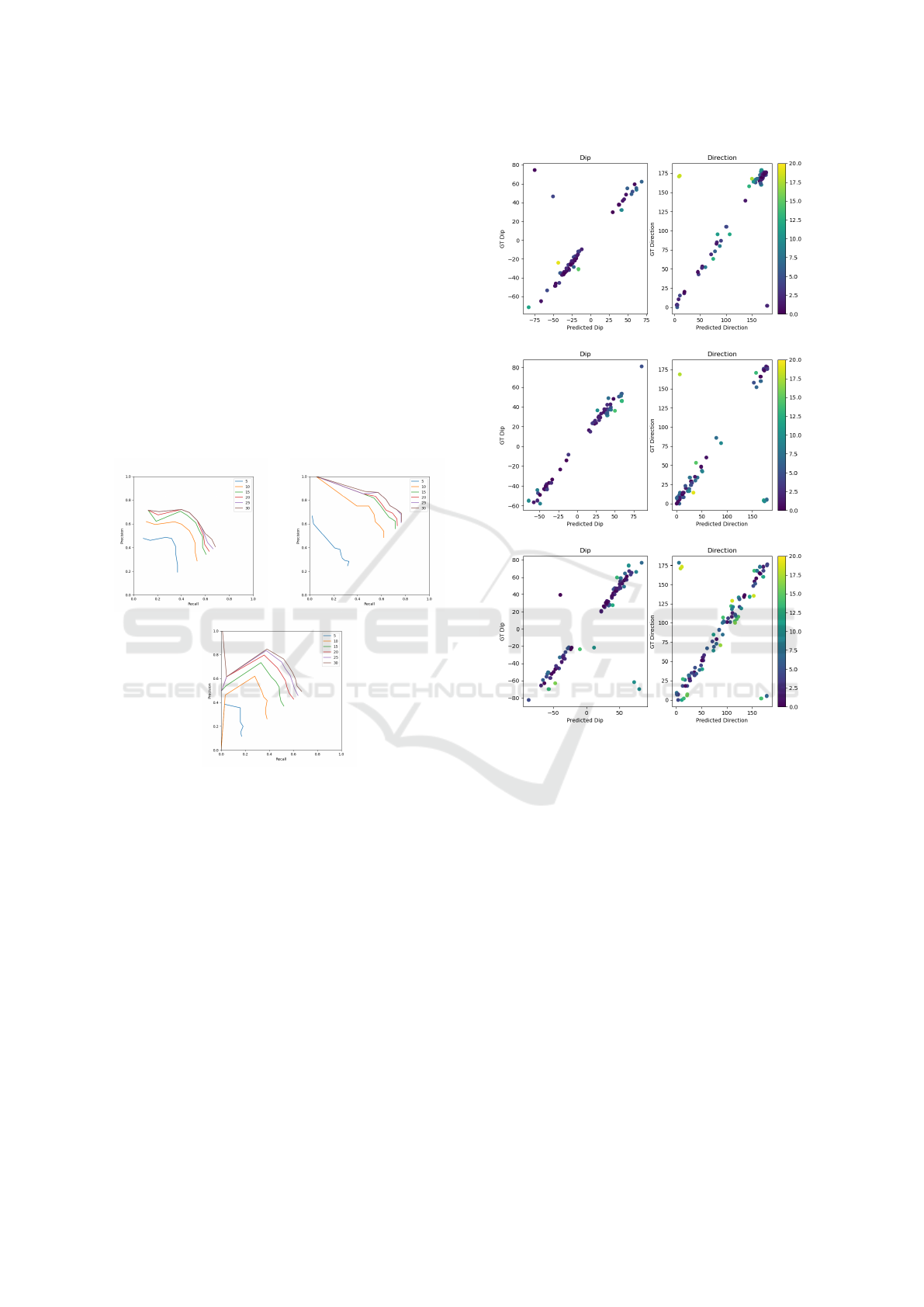
Figure 5: Precision and recall for the 3 datasets.
In practice, fractures are not perfectly following a
sinusoidal shape, but there can be slight deviations.
Moreover, the width of real fractures varies and es-
tablishing such an accurate ground-truth is a labori-
ous work, which is beyond the scope of this work.
Hence, we used the mIoU just a mere indication of
how to choose some training parameters, such as label
weights, atrous rates or batch size. To get an insight
on how key parameters are influencing the results, the
Precision-Recall curve is an excellent instrument that
allows the user to select the optimal tradeoff in terms
of sensitivity and specificity.
To derive the PR curve, we first need to classify all
detections and ground-truth instances into true pos-
itives (TP), false positives (FP). Additionally, each
detection needs a confidence score, so that we can
choose the optimal tradeoff. We define the confi-
dence score as the number of inliers obtained from
Figure 6: The results of dip and dip direction calculation for
the three datasets.
overlaying the detected sinusoid on the ground-truth
and counting the common pixels. From a computer
vision perspective, it would be enough to classify the
detections based on the IoU score, however, given that
our end goal for the system is to deliver sinusoid pa-
rameters, it is more desirable to compare the detec-
tions with the ground-truth in the borehole reference
system, namely comparing fractures’ depth, dip angle
and dip direction by computing the absolute error. In
Fig. 5, the PR curve is computed for multiple error
thresholds, expressed in absolute units (5-30%). This
has been done to overcome the limitation of generat-
ing a fixed width for all fractures. However, we can
select a decent error margin of 20 units and then cal-
culate the confusion matrix, which can be inspected
in Table 1. After carefully analyzing the results de-
picted in Fig. 6, we came to the same conclusion as
(Alzubaidi et al., 2022), that dip direction results are
less accurate than dip angle or depth of fracture re-
Automatic Fracture Detection and Characterization in Borehole Images Using Deep Learning-Based Semantic Segmentation
861
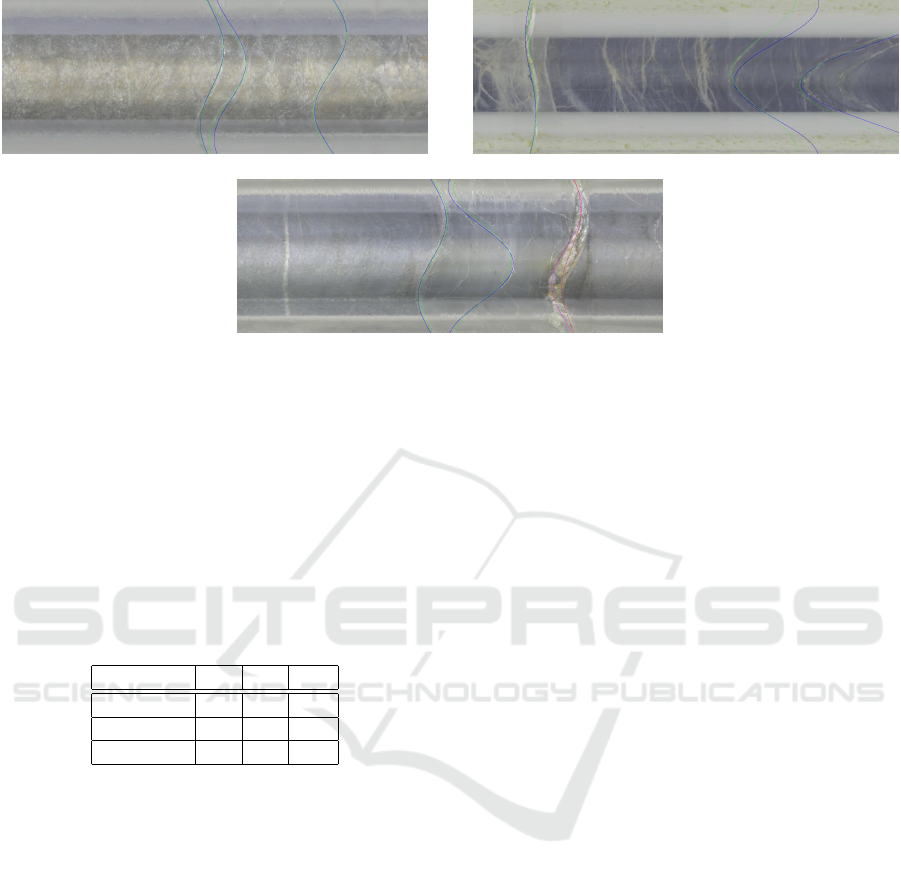
(a) . (b) .
(c) .
Figure 7: Sinusoid fitting results. Color scheme: Blue - ground-truth (GT) sinusoid, detected; Green - predicted sinusoid,
matched with GT; Red - GT sinusoid, not detected; Pink - predicted sinusoid, not matched with GT.
sults, due to being highly sensitive to the sinusoid fit-
ting and fracture segmentation. Moreover, in the case
of the confusion matrix, if one sinusoid prediction is
off by more than a certain percentage, then it will pro-
duce both a false positive and a false negative. Un-
fortunately, due to the restricted application domain,
there are no open-datasets available to benchmark our
method.
Table 1: Confusion matrix for a threshold of 20 units.
Datasets TP FP FN
Dataset#1 66 39 58
Dataset#2 55 17 36
Dataset#3 89 50 89
6 CONCLUSION
This work paves the way towards a fully automatic
system for fracture recognition and characterization
in borehole images. The proposed workflow trains
a semantic segmentation network by using only real
images and performs inference to detect possible
fracture pixels. The second stage of the workflow fits
sinusoid curves on the detected fractures and retains
the best matches, ultimately delivering as output the
sinusoid parameters in the borehole space parameters,
namely fracture depth, dip angle and dip direction.
Additionally, we output a confidence score that can be
used in further filtering of the detections by a human
operator. The developed algorithm is accurate and
faster than a human interpretation, hence representing
a major help for geologists. As a future work, we aim
to benchmark other DNN for semantic segmen-
tation and improve the robustness of the algorithm.
ACKNOWLEDGEMENTS
This work was supported by Real-Time AI-Supported
Ore Grade Evaluation for Automated Mining - RAGE
project. We also gratefully acknowledge the sup-
port of ASTROCK Oy for providing the borehole im-
ages and the corresponding ground-truth annotations.
The work is part of the Academy of Finland Flag-
ship Programme, Photonics Research and Innovation
(PREIN), decision 320168.
REFERENCES
Alzubaidi, F., Makuluni, P., Clark, S. R., Lie, J. E.,
Mostaghimi, P., and Armstrong, R. T. (2022). Auto-
matic fracture detection and characterization from un-
wrapped drill-core images using mask r–cnn. Journal
of Petroleum Science and Engineering, 208:109471.
Anatoli Quintanilla Cruz, R., Cacau, D. C., dos Santos,
R. M., Ribeiro Pereira, E. J., Leta, F. R., and Gonza-
lez Clua, E. (2017). Improving accuracy of automatic
fracture detection in borehole images with deep learn-
ing and gpus. In 2017 30th SIBGRAPI Conference
on Graphics, Patterns and Images (SIBGRAPI), pages
345–350.
Carey, J. W., Lei, Z., Rougier, E., Mori, H., and
Viswanathan, H. (2015). Fracture-permeability be-
havior of shale. Journal of Unconventional Oil and
Gas Resources, 11:27–43.
Chen, L., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2015). Semantic image segmentation
with deep convolutional nets and fully connected crfs.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
862

In Bengio, Y. and LeCun, Y., editors, 3rd Interna-
tional Conference on Learning Representations, ICLR
2015, San Diego, CA, USA, May 7-9, 2015, Confer-
ence Track Proceedings.
Chen, L., Zhu, Y., Papandreou, G., Schroff, F., and Adam,
H. (2018). Encoder-decoder with atrous separable
convolution for semantic image segmentation. In Fer-
rari, V., Hebert, M., Sminchisescu, C., and Weiss, Y.,
editors, Computer Vision - ECCV 2018 - 15th Euro-
pean Conference, Munich, Germany, September 8-14,
2018, Proceedings, Part VII, volume 11211 of Lecture
Notes in Computer Science, pages 833–851. Springer.
Chollet, F. (2017). Xception: Deep learning with depth-
wise separable convolutions. In 2017 IEEE Confer-
ence on Computer Vision and Pattern Recognition,
CVPR 2017, Honolulu, HI, USA, July 21-26, 2017,
pages 1800–1807. IEEE Computer Society.
Dias, L. O., Bom, C. R., Faria, E. L., Valent
´
ın, M. B., Cor-
reia, M. D., de Albuquerque, M. P., de Albuquerque,
M. P., and Coelho, J. M. (2020). Automatic detection
of fractures and breakouts patterns in acoustic bore-
hole image logs using fast-region convolutional neu-
ral networks. Journal of Petroleum Science and Engi-
neering, 191:107099.
Everingham, M., Van Gool, L., Williams, C.
K. I., Winn, J., and Zisserman, A. The
PASCAL Visual Object Classes Challenge
2012 (VOC2012) Results. http://www.pascal-
network.org/challenges/VOC/voc2012/workshop/index.html.
Girshick, R. (2015). Fast r-cnn. In International Conference
on Computer Vision (ICCV).
Glossop, K., Lisboa, P. J. G., Russell, P. C., Siddans, A., and
Jones, G. R. (1999). An implementation of the hough
transformation for the identification and labelling of
fixed period sinusoidal curves. Comput. Vis. Image
Underst., 74:96–100.
Hall, J., Ponzi, M., Gonfalini, M., and Maletti, G. (1996).
Automatic Extraction And Characterisation Of Geo-
logical Features And Textures Front Borehole Images
And Core Photographs. volume All Days of SPWLA
Annual Logging Symposium. SPWLA-1996-CCC.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In 2017 IEEE International Conference
on Computer Vision (ICCV), pages 2980–2988.
Howard, A., Sandler, M., Chu, G., Chen, L.-C., Chen, B.,
Tan, M., Wang, W., Zhu, Y., Pang, R., Vasudevan, V.,
Le, Q. V., and Adam, H. (2019). Searching for mo-
bilenetv3. In ICCV.
Li, J., Jiang, F., Yang, J., Kong, B., Gogate, M., Dashtipour,
K., and Hussain, A. (2021). Lane-deeplab: Lane se-
mantic segmentation in automatic driving scenarios
for high-definition maps. Neurocomputing, 465:15–
25.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft coco: Common objects in context. In Fleet,
D., Pajdla, T., Schiele, B., and Tuytelaars, T., edi-
tors, Computer Vision – ECCV 2014, pages 740–755,
Cham. Springer International Publishing.
Moran, M. B. H., Cuno, J. S., Riveaux, J. A., Vasconcellos,
E. C., Biondi, M., Clua, E. W., Correia, M. D., and
Conci, A. (2020). Automatic sinusoidal curves detec-
tion in borehole images using the iterated local search
algorithm. In 2020 International Conference on Sys-
tems, Signals and Image Processing (IWSSIP), pages
255–260.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). Mobilenetv2: Inverted residuals
and linear bottlenecks. In CVPR.
Tabernik, D.,
ˇ
Sela, S., Skvar
ˇ
c, J., and Sko
ˇ
caj, D. (2019).
Segmentation-Based Deep-Learning Approach for
Surface-Defect Detection. Journal of Intelligent Man-
ufacturing.
Thapa, B., Hughett, P., and Karasaki, K. (1997). Semi-
automatic analysis of rock fracture orientations from
borehole wall images. Geophysics, 62(1):129–137.
cited By 32.
van Ginkel, M., Kraaijveld, M. A., van Vliet, L. J., Reding,
E. P., Verbeek, P. W., and Lammers, H. J. (2003). Ro-
bust curve detection using a radon transform in orien-
tation space. In Big
¨
un, J. and Gustavsson, T., editors,
Image Analysis, 13th Scandinavian Conference, SCIA
2003, Halmstad, Sweden, June 29 - July 2, 2003, Pro-
ceedings, volume 2749 of Lecture Notes in Computer
Science, pages 125–132. Springer.
Virtanen, P., Gommers, R., Oliphant, T. E., Haberland, M.,
Reddy, T., Cournapeau, D., Burovski, E., Peterson, P.,
Weckesser, W., Bright, J., van der Walt, S. J., Brett,
M., Wilson, J., Millman, K. J., Mayorov, N., Nel-
son, A. R. J., Jones, E., Kern, R., Larson, E., Carey,
C. J., Polat,
˙
I., Feng, Y., Moore, E. W., VanderPlas,
J., Laxalde, D., Perktold, J., Cimrman, R., Henriksen,
I., Quintero, E. A., Harris, C. R., Archibald, A. M.,
Ribeiro, A. H., Pedregosa, F., van Mulbregt, P., and
SciPy 1.0 Contributors (2020). SciPy 1.0: Fundamen-
tal Algorithms for Scientific Computing in Python.
Nature Methods, 17:261–272.
Wedge, D., Holden, E.-J., Dentith, M., and Spadaccini,
N. (2015). Automated structure detection and anal-
ysis in televiewer images. ASEG Extended Abstracts,
2015(1):1–4.
Zhang, X. and Xiao, X. (2009). Detection of fractures in
borehole image. In Zhang, T., Hirsch, B., Cao, Z.,
and Lu, H., editors, MIPPR 2009: Automatic Target
Recognition and Image Analysis, volume 7495, pages
1043 – 1048. International Society for Optics and Pho-
tonics, SPIE.
Automatic Fracture Detection and Characterization in Borehole Images Using Deep Learning-Based Semantic Segmentation
863
