
Exploiting GAN Capacity to Generate Synthetic Automotive Radar Data
Mauren Louise S. C. de Andrade
1
, Matheus Velloso Nogueira
2
, Eduardo Candioto Fidelis
2
,
Luiz Henrique Aguiar Campos
2
, Pietro Lo Presti Campos
2
, Torsten Sch
¨
on
3
and Lester de Abreu Faria
2
1
Universidade Tecnologica Federal do Parana, Ponta Grossa, Brazil
2
Centro Universitario Facens, Sorocaba, Brazil
3
AImotion Bavaria, Technische Hochschule Ingolstadt, Ingolstadt, Germany
fi
pietro.campos@facens.br, torsten.schoen@thi.de, lester.faria@facens.br
Keywords:
Radar Application, Generative Adversarial Network, Ground-Based Radar Dataset, Synthetic Automotive
Radar Data.
Abstract:
In this paper, we evaluate the training of GAN for synthetic RAD image generation for four objects reflected
by Frequency Modulated Continuous Wave radar: car, motorcycle, pedestrian and truck. This evaluation adds
a new possibility for data augmentation when radar data labeling available is not enough. The results show
that, yes, the GAN generated RAD images well, even when a specific class of the object is necessary. We
also compared the scores of three GAN architectures, GAN Vanilla, CGAN, and DCGAN, in RAD synthetic
imaging generation. We show that the generator can produce RAD images well enough with the results
analyzed.
1 INTRODUCTION
Avoid and preventing car accidents are the main ob-
jective when the automobile industry uses sensors like
LiDAR, digital cameras, and radar. So, it is funda-
mental to guarantee that kind of technologies will re-
turn the correct information about the vehicles and
what is around them. For this, many researchers have
dedicated their effort to studying and creating a more
confident use of those sensors (Schuler et al., 2008),
(Liu et al., 2017), (Eder et al., 2019), (Deep, 2020),
(Lee et al., 2020), (Ngo et al., 2021). Unfortunately,
the high cost of LiDAR and the problems in capturing
images in adverse weather conditions limit its use.
On the other hand, adding radar technologies such
as Frequency Modulated Continuous Wave (FMCW)
in automobile devices can be an efficient and cost-
effective choice even in low light conditions and bad
weather situations. In this case, the purpose of the
electromagnetic waves produced by the radar is the
detection of the position, velocity, and characteristics
of targets by the radar. With this aim, the radar trans-
mits electromagnetic waves and receives the echo re-
turned after being reflected, detecting both the pre-
sence of targets and their spatial location (Rahman,
2019), (Iberle et al., 2019).
In a nutshell, the electromagnetic waves emitted
by the radar are used to detect objects through sig-
nal strength captured by the receivers. When these
waves hit an object, they are reflected in different di-
rections. Just a tiny part of the emitted energy re-
turns to the radar, susceptible to noise such as cor-
ruption, thermal noise, electromagnetic interference,
atmospheric noise, and electronic countermeasures
(Rahman, 2019), (Danielsson, 2010). Then, the raw
radar data generated can be represented as 3D ten-
sors that illustrate the range, angle, and velocity called
the Range-Azimuth-Doppler (RAD) spectrum. Figu-
re 1 shows a Range-Azimuth-Doppler (RAD) spec-
trum sample and the targets as well as the camera im-
age of the scene.
However, interpreting the radar data is not easy
task, mainly due to the scarcity of validated data avai-
lable (Wald and Weinmann, 2019), (de Oliveira and
Bekooij, 2020). Besides, the data collected and gene-
rated by the radars must be validated and calibrated in
an experimental field to ensure the reliability of sys-
tems, specifically when related to safety.
To study, analyze and test the FMCW radar’s data,
the researchers use simulators, such as Carla and
Radar Toolbox by Matlab, among others (Dosovit-
skiy et al., 2017), (MathWorks, 2022). In this case,
it is possible to simulate the radar at different levels
of abstraction through mathematical and probabilistic
models provided by the simulators or through the in-
sertion of real data acquired by the radar. In this way,
262
C. de Andrade, M., Nogueira, M., Fidelis, E., Campos, L., Campos, P., Schön, T. and de Abreu Faria, L.
Exploiting GAN Capacity to Generate Synthetic Automotive Radar Data.
DOI: 10.5220/0011672400003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
262-271
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

Figure 1: Range-Azimuth-Doppler spectrum and it’s targets. Range-Azimuth on the lower left and Range-Doppler on the
lower right.
it is possible to analyze the experimental data more
realistically to ensure that the signal radar use and in-
terpretation are more reliable in different contexts.
However, both the real data generated by the radar
and those produced artificially must contain a signi-
ficant number of samples in different scenarios. In
this case, synthetic data makes it possible to increase
the number of samples available. So far, two main
approaches have been used to generate synthetic radar
data for use by simulators: models based on ray-
tracing and based on artificial neural networks.
The ray-tracing method is based on ray optics that
solve the Maxwell equation at high frequency, mode-
ling the propagation with estimates of path loss, ar-
rival/departure angle, and time delays. It is a com-
puter program and is a numerical method that sol-
ving the Maxwell equation (Yun and Iskander, 2015).
However, the complexity of the calculations is a ne-
gative aspect of applying this methodology in the ge-
neration of synthetic radar data since it requires high
computational power, consequently, difficult its appli-
cation on a large scale (Magosi et al., 2022).
On the other hand, methods based on neural net-
works are designed to learn from the representations
of high-level features of the input data, which are
used to make intelligent decisions in different sub-
jects such as engineering, medicine, environmental,
agriculture, technology, climate, business, arts, and
nanotechnology, etc (Abiodun et al., 2018). Some
standard deep learning networks include deep con-
volutional neural networks (DCNNs), recurrent neu-
ral networks (RNNs), generative adversarial network
(GAN) and automatic encoders, among others (Abdu
et al., 2021a).
In the specific case of synthetic radar data gene-
ration, architectures based on autoencoder neural net-
works and generative adversarial networks have been
successfully applied to overcome the disadvantages of
traditional ray-tracing approaches (not deep learning)
(Song et al., 2019), (de Oliveira and Bekooij, 2020).
However, the application to generate synthetic data
related to RAD images is scarce. In general, the algo-
rithms of these classes present problems related to the
availability of labeled data that compose the model to
be trained (Jiao and Zhao, 2019).
GAN is from the family of artificial neural net-
works that were developed to generate data with cha-
racteristics similar to the real input data. The basic
idea is the combination of two networks that train
together: the generator, which uses a vector of ran-
dom values as input and generates data with the same
structure as the training data; and the discriminator,
which uses dataset containing observations from both
training and generator-generated data, to then clas-
sify the observations as ”real” or ”generated” (Rad-
ford et al., 2016).
So, motivated by the challenge of generating syn-
thetic radar data, this paper will use the adversarial
training concept to create new RAD images from an
image database with four types of objects generated
through the captured FMWC radar. For this purpose,
we will use a labeled image database using images
of the scene provided by a camera system as guide.
We will apply and examine three generative adver-
sarial network approaches to generate synthetic radar
data (GAN (Goodfellow et al., 2014), CGAN (Mirza
and Osindero, 2014a) and DCGAN (Radford et al.,
2015)). Even so, as far as we know, there is still no
GAN assessment in RAD imaging generation. There-
fore, this article adds RAD imaging generation by
GAN as a new perspective for using synthetic data as
data augmentation for RAD image datasets for poste-
rior application on simulators.
In this article, besides to comparing the best per-
formance in generating RAD images between the
GAN, CGAN, and DCGAN networks, we analyzed
the applicability of the generated data for data aug-
mentation. To do so, we evaluated the ability of the
generator to produce compelling images enough to
make it difficult for the discriminator task to distin-
guish between authentic and false images. Further-
more, we evaluated the influence exerted on the values
of the scores obtained by training of generator and
discriminator when specific parameters are changed.
The main contributions of this article are:
• evaluation of the best performance between three
GAN architectures (traditional GAN, CGAN, and
DCGAN) in generating synthetic RAD images;
Exploiting GAN Capacity to Generate Synthetic Automotive Radar Data
263

• assessment of the ability of the generator to pro-
duce images good enough to make it difficult for
the discriminator to distinguish between ”real”
and ”fake” images;
• analyze of the influence of values of the scores
obtained by the GAN when specific parameters
are changed;
• analyze the applicability of the synthetic RAD
image generated for data augmentation.
The paper is organized as follows. In Section 2,
works related to the generation of synthetic radar data
are presented. In Section 3, the generative model net-
work is briefly presented. In Section 4, the experi-
mental setup used are described. In Section 5 the
results achieved by training GAN methods are pre-
sented in order to validate the generated databases.
Finally, conclusions are provided in Section 6.
2 RELATED WORK
Traditionally, radar is used to identify objects around
itself. Its use in defense, air traffic control, maritime
control, and air industries is known for its ability to
locate objects over long distances (Javadi and Farina,
2020). However, the applicability of radar data has
been expanding as the cost of acquiring the radar be-
comes more affordable. Unlike the initially idealized
applications, the radar can be positioned directing to-
wards identifying smaller objects closer to the radar,
such as vehicles and people on public roads, in open
or closed environments.
Therefore, an adequate analysis of the radar data is
necessary, especially regarding vehicle safety. In this
case, the RAD spectrum will present small nuances
that will allow the correct identification and subse-
quent classification of the reflected object. In general,
for a classification to be considered promising, it must
be used in large volumes of labeled data, which is not
easy to obtain as described above.
This section will briefly review existing work on
synthetic radar data generation and its applications.
The Table 1 provides a summary of the works. Note
that the papers in Table 1 were selected for their par-
ticularity on generated synthetic radar data images for
different contexts. Based on the literature review re-
sults, we then justify why our work proposes the GAN
networks to provide data augmentation of RAD ima-
ges.
We can see in Table 1 that most of the works in
the literature apply GAN networks to generate syn-
thetic radar data instead the traditional data augmen-
tation (Skeika et al., 2020) . One of the reasons is the
traditional data argumentation that involves rotation,
translation, noise injections, alteration in the color,
brightness, contrast, and cropping, among others, is
impossible for range-azimuth and range-Doppler ima-
ges (Skeika et al., 2020), (Kern and Waldschmidt,
2022). For example, (Alnujaim et al., 2021), (Qu
et al., 2021), (Vishwakarma et al., 2021), (Erol et al.,
2019) used different adversarial generative network
architectures for data augmentation of range-Doppler
images in human gestures classification. In these
works, the main idea is to guarantee a large enough
dataset to classify human gestures and activities cor-
rectly. When classified correctly, the signature of hu-
man motions can be used as an auxiliary in defense,
surveillance, and health care. Variations in architec-
ture were between works by (Alnujaim et al., 2021),
(Erol et al., 2019), (Rahman et al., 2022) using a con-
ditional GAN framework, (Rahman et al., 2021), (Do-
herty et al., 2019), (Vishwakarma et al., 2021) using
a traditional GAN and (Radford et al., 2015) using
DCGAN.
The works closest to ours are (Wheeler et al.,
2017) and, (de Oliveira and Bekooij, 2020) since
their objective was to conduct experiments to increase
vehicle safety. In Wheeler, T. A. et al. (Wheeler et al.,
2017), for example, they generate synthetic radar data
for use in automotive simulations. The authors pre-
sented an approach to generating synthetic radar data,
an architecture based on DCGAN. For this, the Varia-
tional Autoencoder architecture was used to syntheti-
cally simulate the reading of a radar sensor. In the
application, the network receives two inputs: (a) a
3D tensor representing the Range-Azimuth map of the
radar and (b) a list of objects detected by the sensor,
containing each identified object and its characteris-
tics. The model was able to generate synthetic radar
data with low complexity of scenario (with few ob-
jects).
In this way, to create synthetic Range-Doppler
maps of FMCW radars for short range and with mo-
ving objects (pedestrians and cyclists), de Oliveira
and Bekooij (de Oliveira and Bekooij, 2020) made use
of GAN and Deep Convolutional Autoencoders. The
data consists of multiple Range-Doppler (RD) spec-
tra with and without targets, collected with an FMCW
radar. The authors place both frames in sequence and
add noise to the synthetic RD maps, groups of five
series. They are training a system detector using syn-
thetic data and evaluating it with real data from the
FMCW radar, with good results.
Although the examples of GAN in the generation
of synthetic radar data described are promising, so far,
we are unaware of the use of the adversarial training
concept in the creation of new RAD spectrum images
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
264
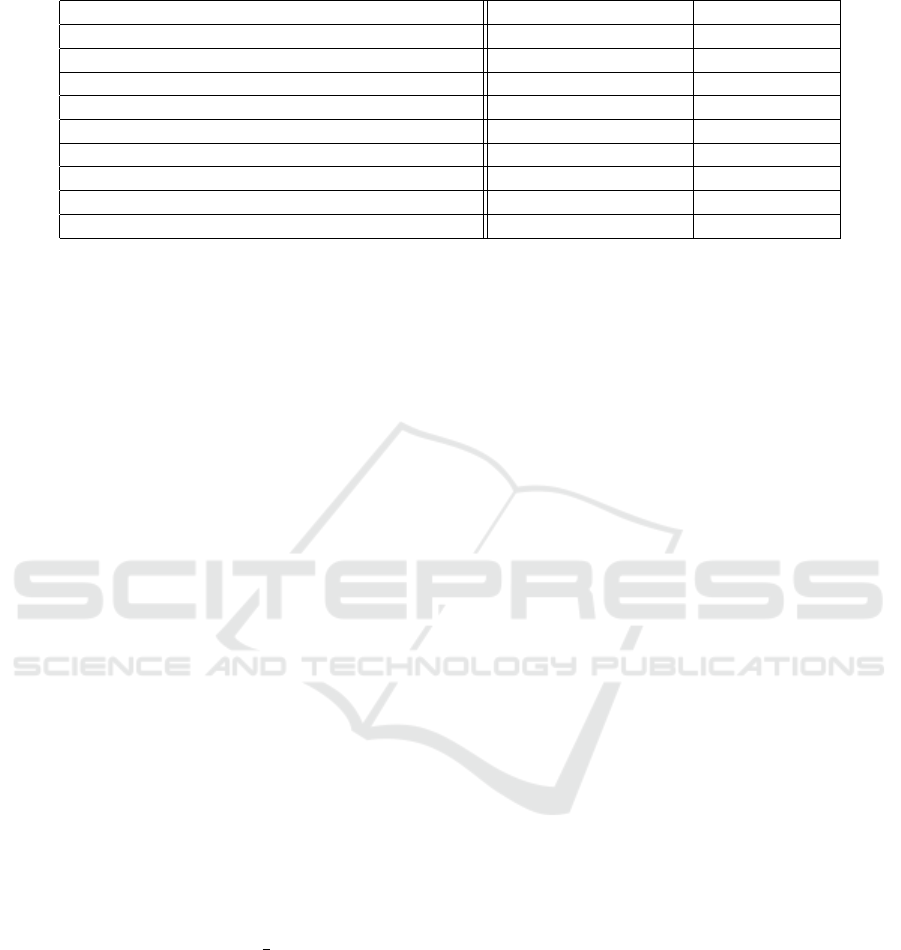
Table 1: A brief summary of the existing works on synthetic radar data generation.
Author Application Methodology
Alnujaim, I., et al. (Alnujaim et al., 2021) Human body CGAN
Qu, L., et al. (Qu et al., 2021) Human data WGAN-GP
Vishwakarma, S., et al (Vishwakarma et al., 2021) Human data GAN
Erol, B., et al. (Erol et al., 2019) Human gesture ACGAN
Wheeler, et al. (Wheeler et al., 2017) Radar data DCGAN
M.M. Rahman, et al. (Rahman et al., 2021) Human data GAN
M.M. Rahman, et al. (Rahman et al., 2022) Human data CGAN
Doherty, H. G., et al. (Doherty et al., 2019) Human data GAN+AAE
Oliveira et al.(de Oliveira and Bekooij, 2020) Pedestrian and cyclists GAN and DCA
for the four objects proposed here (car, pedestrian,
truck and motorcycle).
3 GENERATIVE ADVERSARIAL
NETWORK
The Generative Adversarial Network (Goodfellow
et al., 2014), popularly known only by its acronym
GANs, was presented as an alternative framework to
train generative models. They are made up of two
network blocks, a generator, and a discriminator. The
generator usually takes random noise as its input and
processes it to produce output samples that look simi-
lar to the data distribution (e.g., false images). In con-
trast, the discriminator tries to compare the difference
between the actual data samples and those produced
by the generator (Abdu et al., 2021b).
The main idea of the framework is to estimate
generative models through an adversarial process, in
which both models are trained simultaneously: gene-
rative G that captures the data distribution and discri-
minative D that estimates the probability that a sample
came from the training data instead of G.
The training procedure for G is to maximize the
probability that D will make an error. This framework
corresponds to a minimax game for two players. In
the arbitrary space of the functions G and D, there is
a single solution, with G retrieving the distribution of
the training data and D equal to
1
2
everywhere. In the
case where G and D are defined by multilayer percep-
trons, the entire system can be trained with backpro-
pagation (Lekic and Babic, 2019).
3.1 Loss Function and Scores
In adversarial generative networks, the generator
produces images that the discriminator evaluates,
whether they are real or false. To maximize the pro-
bability of these generated images being classified as
real by the discriminator, minimizing the negative log
likelihood functions is necessary. To do so, consider
the output Y as the probability of the discriminator.
That is, Y is the probability of the generated image
being ”real,” and 1 − Y is the probability of the image
being ”false.” A loss function is calculated to penal-
ize wrong forecasts. In this case, if the probability
associated with the ”real” class is equal to 1.0, then
the cost will be zero. Likewise, if the probability as-
sociated with the class is low, close to 0.0, then its
cost will be high. Therefore, the definition of the cost
function for the generator is (Goodfellow et al., 2014):
lossG = −mean(log(Y
Gen
)), (1)
where Y
Gen
will contain the output probabilities of the
discriminator being identified as ”false”.
However, for the networks to compete with each
other, maximizing the probability of the discriminator
making accurate predictions is necessary by minimi-
zing the corresponding logarithmic probability func-
tions. The loss function for the discriminator will then
be given by:
lossD = −mean(log(Y
Real
)) − mean(log(1 − Y
Gen
))
(2)
where Y
Real
will contain the output probabilities of
the discriminator being identified as ”real”. That way,
the score results are inversely proportional to the loss.
However, it contains the same information. So, the
best fit is when both scores are closets to 0.5. In this
case, the discriminator could not distinguish between
”real” and ”false” images.
3.2 Conditional Generative Adversarial
Network - CGAN
A CGAN is a variation of the GAN used to apply ima-
ge labeling during the training process and train the
generative network to generate images according to
the labeling (Mirza and Osindero, 2014b). We could
generate new images of a particular class in synthetic
Exploiting GAN Capacity to Generate Synthetic Automotive Radar Data
265

radar data, for example, only images labeled as mo-
torcycles.
3.3 Deep Conditional Generative
Adversarial Network - DCGAN
DCGAN was developed by Radford et. al (Rad-
ford et al., 2015) in 2016 and uses convolutional
and convolutional-transpose layers in the discrimina-
tor and generator, respectively. In the context of au-
tomotive radar data, one of the main problems in its
application in deep learning models is the lack of ac-
cessible datasets with annotations. Although labeling
is one of the most challenging tasks in computer vi-
sion and its related applications, with unsupervised
generative models such as GANs, a large amount of
data can be generated (Abdu et al., 2021b). In this
case, it is natural to think about using GAN to gener-
ate large radar signal databases and train them in an
unsupervised way, helping in the labeling task.
4 EXPERIMENTAL SETUP
The identification and classification of objects is a
trivial task for humans, even when the objects are hid-
den in the scene. However, RAD spectrum images
are more complex, making it challenging to identify
reflected objects. The identification is usually made
with a digital camera that captures the scene simul-
taneously as the radar. The camera, in this case, can
confirm an object class that the radar is reflecting at a
given time. But, even with this support, the task is la-
bor intensive. At the same time, to make use of radar
data in classification tasks by simulators, a large set
of labeled data is needed to ensure efficiency.
In this study, we want to generate new Range-
Azimuth-Doppler (RAD) spectrum using GAN tech-
nique to increase the labeled image database using a
human-labeled dataset. Classes were assigned and la-
beled using images of the scene provided by a came-
ra system. Possible classes are labeled as pedestrian,
motorcycle, truck, and car. The main objective of this
article is to evaluate the ability to generate RAD im-
ages by GAN networks. Figure 2, image on the right,
illustrates real RAD images, that is, constructed by
the radar with the four labeled categories (car, motor-
cycle, pedestrian and truck). These images are the cut
targets of spectrums as in Figure 1. Then, in order
to identify problems and scores on how well the dis-
criminator was able to separate new or false images,
a probability statistic was used.
4.1 Accumulation of Radar Data
This study uses a short-range automotive radar ope-
rating in a frequency of 76 GHz, with coverage of up
to 30 m — the radar was placed on top of a tripod,
and the data was recorded in different urban scena-
rios. The camera was positioned next to the radar to
provide image support for labeling. Figure 2 shows
the positioning of the radar and camera in front of the
street.
4.2 Dataset
The RAD images were labeled by a group of people
using video as a visual aid. Car, motorcycle, pedes-
trian, and truck objects were tagged with this method,
as illustrated in Figure 2. The training data is obtained
by cutting out a window of 64x64 pixels around each
possible object. The number of images labeled was
2680 cars, 2680 motorcycles, 2466 pedestrians and
2475 trucks.
4.3 GAN Architecture
The following generative adversarial networks were
used, GAN, CGAN, and DCGAN ((Goodfellow et al.,
2014), (Mirza and Osindero, 2014a), (Radford et al.,
2015)), respectively). By definition of the GAN,
there are two networks training together, generator
and discriminator. The generator generates images
from random vectors and discriminator classifies that
images generated as real or fakes images (for more
detail about networks architectures see (MathWorks,
2022)).
By definition of the CGAN, both the generator and
discriminator have a two-input network, labels, and
noise to the generator and images and labels to the
discriminator that again it tries to classify the gener-
ated images as real or fake images but now based on a
predefined class (see (MathWorks, 2022) for details).
The generator and discriminator defined for DC-
GAN also can be found in (MathWorks, 2022).
5 EXPERIMENTAL RESULTS
Extensive experiments were performed to analyze and
compare the GAN architectures. The experimen-
tal analyses are divided into four phases: evaluation
of the best performance between traditional GAN,
CGAN, and DCGAN in generating RAD images. As-
sessment of the generator’s ability to produce images
that can make it difficult for the discriminator to dis-
tinguish between ”real” and ”fake” images. Analysis
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
266

Figure 2: Positioning of the radar and camera and, example of real RAD image: a) car, b) motorcycle, c) pedestrian and d)
truck.
of the influence on the values of the scores obtained
by the GAN when specific parameters are changed.
Furthermore, finally, analyze the applicability of the
generated data for data augmentation.
In developing the GAN, CGAN, and DCGAN net-
work, we used the architectures described earlier. The
network was built using the Deep Learning Toolbox
Matlab. All networks were performed with the fol-
lowing parameters: 100 trained epochs, 0.5 dropout,
10
−2
learning rate, 0.5 gradient decay factor and
0.999 squared gradient decay factor. All experiments
were performed on a MacBook Air 1.6 GHz Intel
Core i5 Dual-Core, Intel HD Graphics 6000 1536
MB, and 8 GB 1600 MHz DDR3 memory.
To define which results obtained by the values of
scores will generate the best images, the generator and
discriminator score values were combined into a sin-
gle value. For that, the metric used was the L − ∞
to determine how close both networks are in an ideal
scenario. In this case, both networks should generate
values close to 0.5. High values (close to 1) or shallow
values (close to zero) indicate a better performance of
one of the networks, invalidating the synthetic gene-
ration of images. Then, the score combined is defined
by (MathWorks, 2022), where sD and sG are respect-
fully the lossD and lossG:
sC = 1 − 2 × max(abs(sD − 0.5), abs(sG − 0.5)) (3)
5.1 Scores Evaluation
The Table 2 presents the results obtained considering
generator, discriminator and combined scores for 100
Epochs and different flipFactor. The flipFactor pa-
rameter is used to define the fraction of real labels to
be inverted in the training of the discriminator. This
way, it adds to the real data noise to improve the learn-
ing of the discriminator and the generator. In this
case, it does not allow the discriminator to learn too
quickly (MathWorks, 2022).
In our experiments, the best-combined score for
the GAN network was 0.6518, with a good value for
the discriminator and the generator scores. The dis-
criminator had 0.5312 as a score, and the generator
had a 0.3259 score. We can see from the graph in
Figure 3 that there is a good performance between the
generator and the discriminator scores. There are no
peaks that indicate any significant advantage for either
network. However, the lower generator score shows
that some new images do not convince the discrim-
inator properly. So, the discriminator could classify
correctly between ”real” and ”fake” images, and the
generator could not produce images well enough. The
generated images illustrated in Figure 3 visually show
the similarity with the real images (Figure 2 above).
Now, with the main of improving the results of our
experiments, we will add some modifications that will
we discuss next.
The best-combined score for the CGAN network
was 0.6391, with a high value for the discriminator
score. The discriminator had a 0.6401 score, and the
generator had a 0.3195 score. As we describe early,
when the value of one network is close to 1.0, that
indicates a better performance over another network.
We can conclude, until now, that even with the good
results observed, if the images generated will not ne-
cessarily be provided by a particular class of object,
it is better to choose the GAN network that can cause
more real data. Figure 4 illustrates the evolution graph
of the generator and discriminator scores for the best
score of the CGAN network, and, generated images
of the motorcycle class.
Finally, the best-combined score for the DCGAN
network was 0.5980, with a high value for the dis-
criminator score again. The discriminator had a
0.6088 score, and the generator had a 0.2990 score.
In this case, with a horst value of generator score in
front of both GAN and CGAN generator scores. Fi-
gure 5 illustrates the evolution graph of the generator
and discriminator scores for the best score of the DC-
GAN network, and the images generated.
The evaluation of all the images generated indi-
cates that the best result was 0.30 flipFactor for the
GAN network, and the second best result was the
same flipFactor valor, 0.30, for the CGAN network.
In those cases, at the same time that the discriminator
learned a strong representation of characteristics that
differentiate the real images from the generated ima-
ges, the generator learned to represent in a very simi-
Exploiting GAN Capacity to Generate Synthetic Automotive Radar Data
267
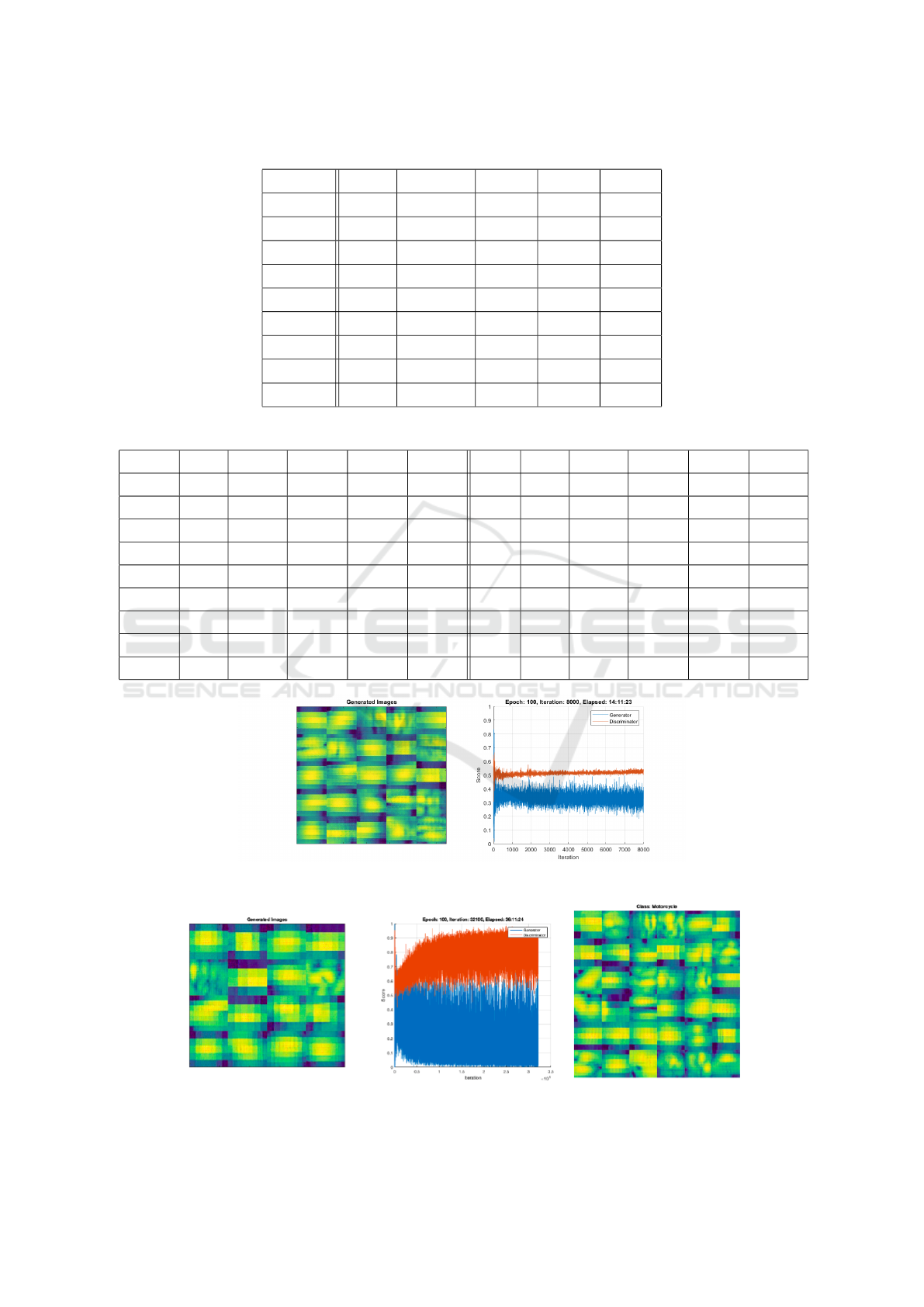
Table 2: Result of GAN and CGAN, 100 to 200 Epochs.
Network Epoch flipFactor scoreD scoreG scoreC
GAN 100 0.30 0.5312 0.3259 0.6518
CGAN 100 0.30 0.6401 0.3195 0.6391
GAN 100 0.10 0.5539 0.3069 0.6138
DCGAN 100 0.30 0.6088 0.2990 0.5980
CGAN 100 0.50 0.4999 0.2691 0.5382
DCGAN 100 0.10 0.6869 0.2283 0.4566
DCGAN 100 0.50 0.5365 0.2061 0.4122
CGAN 100 0.10 0.7969 0.2466 0.4062
GAN 100 0.50 0.5002 0.1822 0.3644
Table 3: Scores of CGAN and GAN, with Dropout and FlipFactor Parameters.
Gan Drop flipF scoreG scoreD scoreC Gan Drop flipF scoreG scoreD scoreC
CGAN 0.75 0.1000 0.4904 0.5636 0.8728 GAN 0.75 0.3000 0.3535 0.5495 0.7070
CGAN 0.50 0.5000 0.2633 0.5278 0.5266 GAN 0.75 0.1000 0.3365 0.5937 0.6731
CGAN 0.75 0.3000 0.2618 0.5359 0.5236 GAN 0.50 0.3000 0.3195 0.6401 0.6391
CGAN 0.50 0.3000 0.2446 0.6342 0.4892 GAN 0.25 0.1000 0.2565 0.5921 0.5130
CGAN 0.75 0.5000 0.2305 0.5033 0.4610 GAN 0.75 0.5000 0.2257 0.5251 0.4515
CGAN 0.50 0.1000 0.2115 0.6604 0.4230 GAN 0.50 0.5000 0.2121 0.5527 0.4243
CGAN 0.25 0.1000 0.1963 0.8500 0.3000 GAN 0.50 0.1000 0.1922 0.7041 0.3844
CGAN 0.25 0.3000 0.1306 0.7412 0.2612 GAN 0.25 0.5000 0.1805 0.6265 0.3611
CGAN 0.25 0.5000 0.0760 0.5535 0.1520 GAN 0.25 0.3000 0.1478 0.6859 0.2956
Figure 3: Generated images with GAN, 0.30 flipFactor; Graphic of scores results from evolution for 100 Epochs.
Figure 4: Generated images with CGAN, 100 epochs, 0.30 flipFactor, graphic of scores results and motorcycle class.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
268
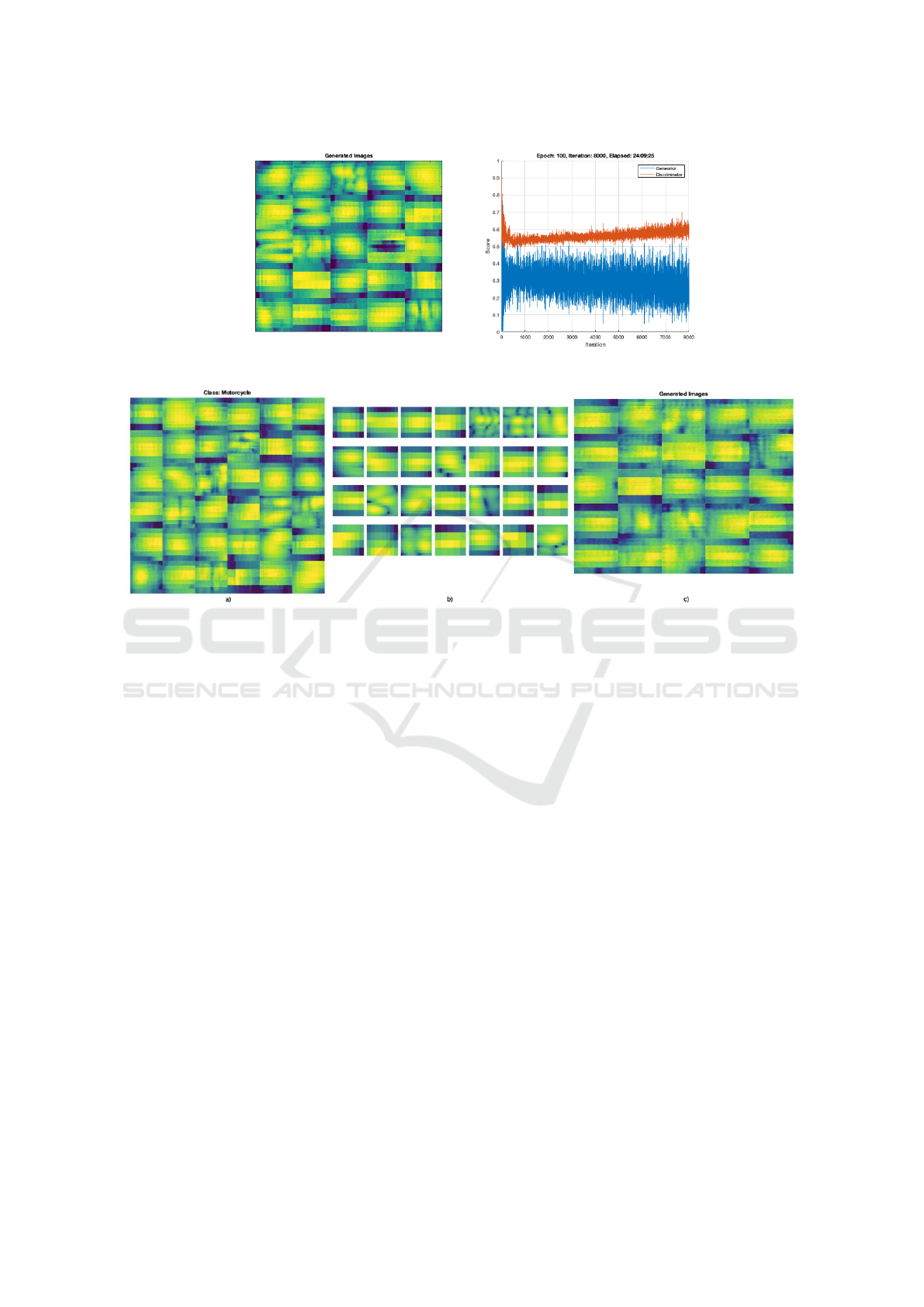
Figure 5: Generated images with DCGAN, graphic of scores results.
Figure 6: The best image generated: a) CGAN (0.8728 score, only motorcycle class sample), b) Real images and c) GAN
(0.7070 score, all classes sample).
lar way the characteristics that allow generating ima-
ges to be similar to the training data. It is possible to
observe that the discriminator is improving the clas-
sification while the generator is improving the abili-
ty to generate new convincing images. However, the
question remains whether it is possible to use those
generated images to augment new data-set.
The final set of experiments included changes in
dropout parameters (Hinton et al., 2012). Our pre-
vious work at Skeika, E. et al. (Skeika et al., 2020)
describes how the dropout technique is essential in
reducing over-fitting during training. In this sense,
the networks were trained with the following dropout
values, 0.25, 0.50, and 0.75, and combined with dif-
ferent values of flipFactor and 50 Epochs. We decided
to change the number of Epochs because, in this part
of our experiments, the main objective is to analyze
the influence of changes values of those parameters
on the final generator and discriminator scores. With
those experiments, we intend to answer how changes
in dropout and flipFactor values can modify the scores
of the two better networks previously observed, GAN
and CGAN. Furthermore, determine the applicability
of the generated data for data augmentation.
According to Table 3, we can observe an evolu-
tion in the network performance after each modifi-
cation proposed in its architecture. We choose only
GAN and CGAN for testing because of their better
scores in previous analyses than those values by DC-
GAN. We can highlight three of them: for dropout
values of 0.75 and flipFactor of 0.10, the combined
score value is 0.8728 by CGAN; for dropout 0.75 and
flipFactor 0.30, the combined score value is 0.7070,
but now, by GAN; and, dropout of 0.75 and flipFac-
tor of 0.10 resulted in a combined score of 0.6731 by
GAN again. Next, the best score combined is again
by GAN, 0.6391.
Despite values 0.8728, 0.7070, 0.6731, and
0.6391 of the combined scores being high, these re-
sults are not enough to attest to the quality of the new
images generated and the ability of the discriminator
in the classification. When we observe the scores in-
dividually, we have clues about the behavior of the
networks and, consequently, the performance in the
competition between them. The generator score in
these cases ideally can not be much lower than the
discriminator score. Despite the generator generating
good images, when the value score of the discrimina-
tor is much higher, it can indicate that it still correctly
classifies most images.
So, if we look at scores of the first best-combined
score, that is, 0.8728, we can infer that there is a bet-
Exploiting GAN Capacity to Generate Synthetic Automotive Radar Data
269

ter response from both the generator and the discrimi-
nator. Both values are balanced (0.4904 - generator;
0.5636 - discriminator), which suggests a slight ad-
vantage in the discriminator classification. However,
with the excellent generator score (98% of the ideal
score), the discriminator will classify many ”fake”
images as ”real,” which is our ultimate goal.
The future works
Regarding the modified parameters, dropout, and
flipFactor, we can observe the impact of these changes
on the final performance of both networks. In our ex-
periments, the best results were obtained using a value
of 0.75 for dropout for the three better scores, fol-
lowed by a 0.50 value for the higher scores observed.
Nevertheless, for flipFactor values, it was impossible
to decide what value fits better. Unfortunately, for
flipFactor parameter value, the only way to decide on
the better value is to test all possibilities for different
contexts. We provide a set of experiments showing
how dropout and flipFactor could influence the final
scores on generator and discriminator training. The
dropout played more influence on generator perfor-
mance, so it is necessary to include high dropout va-
lues to avoid overfitting and generate more realistic
images. However, the flipFactor, just empirical ex-
periments, can decide what parameter value is better
to influence on final scores.
One final observation we can include is the scores
obtained with the same parameters in both GAN
and CGAN networks but with different numbers of
Epochs. Observe in Table 1 that used 0.5 dropouts
and 0.3 flipFactor. We said that the best network was
CGAN based on its score value. We can observe that
in Table 1 and Table 2, in which Epochs decrease to
50, the scores values change but remain whit the bet-
ter score by GAN when we look at the 0.5 dropouts
and 0.3 flipFactor value. On the other hand, as we
said, the dropout parameters can modify the final
score for both GAN and CGAN, shown the better final
score of CGAN. The Figure 6 shows images genera-
ted by the best scores obtained by CGAN (0.8728, as
the choice for the model, images of the motorcycle
class were generated) and by GAN (0.7070, with an
example of all classes mixed).
6 CONCLUSIONS
In this paper, we experimentally evaluated the training
of GAN for synthetic RAD image generation. This
evaluation adds a new possibility for data augmenta-
tion when data labeling available is not enough. The
results showed that, yes, the GAN generated RAD
images well, even when a specific class of the object
is specified. We also compared the scores of three
GAN architectures, GAN, CGAN, and DCGAN, in
RAD synthetic imaging generation. CGAN scored
the highest, while GAN scored the second highest
score but the better scores in most experiments. DC-
GAN performed lower, so we cut it to the final ex-
periments. We show that the generator can produce
RAD images well enough with the results analyzed.
Consequently, it making it difficult for the discrimina-
tor to distinguish between ”real” and ”fake” images.
We can use the RAD images generated to improve
the simulator experiments, including a large dataset
with those images, adding data augmentation. This
work also opens opportunities for new studies related
to RAD data classification, such as conditional gener-
ations based on vehicle class.
In future work, we intend to analyze whether or
not a machine learning classifier will classify RAD
images better by adding GAN RAD synthetic image
as data augmentation create possibilities to the de-
velopment of . We also would like to evaluate the
synthetic image generation by GAN for radar micro
doppler.
ACKNOWLEDGMENTS
This study was supported by the Fundac¸
˜
ao de De-
senvolvimento da Pesquisa - Fundep Rota 2030
(27192*09).
REFERENCES
Abdu, F. J., Zhang, Y., Fu, M., Li, Y., and Deng, Z. (2021a).
Application of deep learning on millimeter-wave radar
signals: A review. Sensors, 21(6).
Abdu, F. J., Zhang, Y., Fu, M., Li, Y., and Deng, Z. (2021b).
Application of deep learning on millimeter-wave radar
signals: A review. Sensors, 21(6):1951.
Abiodun, O. I., Jantan, A., Omolara, A. E., Dada, K. V.,
Mohamed, N. A., and Arshad, H. (2018). State-of-the-
art in artificial neural network applications: A survey.
Heliyon, 4(11):e00938.
Alnujaim, I., Ram, S. S., Oh, D., and Kim, Y. (2021). Syn-
thesis of micro-doppler signatures of human activities
from different aspect angles using generative adver-
sarial networks. IEEE Access, 9:46422–46429.
Danielsson, L. (2010). Tracking and radar sensor mod-
elling for automotive safety systems, volume Doctoral
d.
de Oliveira, M. L. L. and Bekooij, M. J. G. (2020). Gener-
ating synthetic short-range fmcw range-doppler maps
using generative adversarial networks and deep con-
volutional autoencoders. In 2020 IEEE Radar Con-
ference (RadarConf20), pages 1–6.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
270

Deep, Y. (2020). Radar cross-sections of pedestrians at au-
tomotive radar frequencies using ray tracing and point
scatterer modelling. IET Radar, Sonar & Navigation,
14:833–844(11).
Doherty, H. G., Cifola, L., Harmanny, R. I. A., and Fio-
ranelli, F. (2019). Unsupervised learning using gen-
erative adversarial networks on micro-doppler spec-
trograms. In 2019 16th European Radar Conference
(EuRAD), pages 197–200.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An open urban driving
simulator. In Proceedings of the 1st Annual Confer-
ence on Robot Learning, pages 1–16.
Eder, T., Hachicha, R., Sellami, H., van Driesten, C., and
Biebl, E. (2019). Data driven radar detection models:
A comparison of artificial neural networks and non
parametric density estimators on synthetically gener-
ated radar data. In 2019 Kleinheubach Conference,
pages 1–4.
Erol, B., Gurbuz, S. Z., and Amin, M. G. (2019). Gan-based
synthetic radar micro-doppler augmentations for im-
proved human activity recognition. In 2019 IEEE
Radar Conference (RadarConf), pages 1–5.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. Advances
in neural information processing systems, 27.
Hinton, G. E., Srivastava, N., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. R. (2012). Improving neural
networks by preventing co-adaptation of feature de-
tectors.
Iberle, J., Mutschler, M. A., Scharf, P. A., and Walter, T.
(2019). A radar target simulator concept for close-
range targets with micro-doppler signatures. In 2019
12th German Microwave Conference (GeMiC), pages
198–201.
Javadi, S. H. and Farina, A. (2020). Radar networks: A re-
view of features and challenges. Information Fusion,
61:48–55.
Jiao, L. and Zhao, J. (2019). A survey on the new generation
of deep learning in image processing. IEEE Access,
7:172231–172263.
Kern, N. and Waldschmidt, C. (2022). Data augmentation
in time and doppler frequency domain for radar-based
gesture recognition. In 2021 18th European Radar
Conference (EuRAD), pages 33–36.
Lee, H., Ra, M., and Kim, W.-Y. (2020). Nighttime data
augmentation using gan for improving blind-spot de-
tection. IEEE Access, 8:48049–48059.
Lekic, V. and Babic, Z. (2019). Automotive radar and
camera fusion using generative adversarial networks.
Computer Vision and Image Understanding, 184:1–8.
Liu, G., Wang, L., and Zou, S. (2017). A radar-based
blind spot detection and warning system for driver as-
sistance. In 2017 IEEE 2nd Advanced Information
Technology, Electronic and Automation Control Con-
ference (IAEAC), pages 2204–2208.
Magosi, Z. F., Li, H., Rosenberger, P., Wan, L., and Eich-
berger, A. (2022). A survey on modelling of auto-
motive radar sensors for virtual test and validation of
automated driving. Sensors, 22(15).
MathWorks (2022). Use experiment manager to
train generative adversarial networks (gans). url-
https://www.mathworks.com/help/deeplearning.
Mirza, M. and Osindero, S. (2014a). Conditional generative
adversarial nets.
Mirza, M. and Osindero, S. (2014b). Conditional generative
adversarial nets.
Ngo, A., Bauer, M. P., and Resch, M. (2021). A multi-
layered approach for measuring the simulation-to-
reality gap of radar perception for autonomous driv-
ing.
Qu, L., Wang, Y., Yang, T., Zhang, L., and Sun, Y. (2021).
Wgan-gp-based synthetic radar spectrogram augmen-
tation in human activity recognition. In 2021 IEEE
International Geoscience and Remote Sensing Sym-
posium IGARSS, pages 2532–2535.
Radford, A., Metz, L., and Chintala, S. (2015). Unsuper-
vised representation learning with deep convolutional
generative adversarial networks.
Radford, A., Metz, L., and Chintala, S. (2016). Unsuper-
vised representation learning with deep convolutional
generative adversarial networks.
Rahman, H. (2019). Fundamental Principles of Radar.
Cambridge: Cambridge University Press.
Rahman, M. M., Gurbuz, S. Z., and Amin, M. G. (2021).
Physics-aware design of multi-branch gan for human
rf micro-doppler signature synthesis. In 2021 IEEE
Radar Conference (RadarConf21), pages 1–6.
Rahman, M. M., Malaia, E. A., Gurbuz, A. C., Griffin,
D. J., Crawford, C., and Gurbuz, S. Z. (2022). Ef-
fect of kinematics and fluency in adversarial synthetic
data generation for ASL recognition with RF sensors.
IEEE Transactions on Aerospace and Electronic Sys-
tems, 58(4):2732–2745.
Schuler, K., Becker, D., and Wiesbeck, W. (2008). Extrac-
tion of virtual scattering centers of vehicles by ray-
tracing simulations. IEEE Transactions on Antennas
and Propagation, 56(11):3543–3551.
Skeika, E. L., Luz, M. R. D., Fernandes, B. J. T., Siqueira,
H. V., and De Andrade, M. L. S. C. (2020). Convolu-
tional neural network to detect and measure fetal skull
circumference in ultrasound imaging. IEEE Access,
8:191519–191529.
Song, Y., Wang, Y., and Li, Y. (2019). Radar data simula-
tion using deep generative networks. The Journal of
Engineering, 2019(20):6699–6702.
Vishwakarma, S., Tang, C., Li, W., Woodbridge, K., Adve,
R., and Chetty, K. (2021). Gan based noise generation
to aid activity recognition when augmenting measured
wifi radar data with simulations. In 2021 IEEE Inter-
national Conference on Communications Workshops
(ICC Workshops), pages 1–6.
Wald, S. O. and Weinmann, F. (2019). Ray tracing for
range-doppler simulation of 77 ghz automotive sce-
narios. In 2019 13th European Conference on Anten-
nas and Propagation (EuCAP), pages 1–4.
Wheeler, T. A., Holder, M., Winner, H., and Kochenderfer,
M. (2017). Deep stochastic radar models.
Yun, Z. and Iskander, M. F. (2015). Ray tracing for radio
propagation modeling: Principles and applications.
IEEE Access, 3:1089–1100.
Exploiting GAN Capacity to Generate Synthetic Automotive Radar Data
271
