
SNAPE: A Sequential Non-Stationary Decision Process Model for
Adaptive Explanation Generation
Amelie Sophie Robrecht
a
and Stefan Kopp
b
Social Cognitive Systems Group, Faculty of Technology, Bielefeld University, Bielefeld, Germany
Keywords:
Explainable AI, Explanation Planning, Non-Stationary Hierarchichal Decision Processes.
Abstract:
The automatic generation of explanations is an increasingly important problem in the field of Explainable AI
(XAI). However, while most work looks at how complete and correct information can be extracted or how it
can be presented, the success of an explanation also depends on the person the explanation is targeted at. We
present an adaptive explainer model that constructs and employs a partner model to tailor explanations during
the course of the interaction. The model incorporates different linguistic levels of human-like explanations in
a hierarchical, sequential decision process within a non-stationary environment. The model is based on online
planning (using Monte Carlo Tree Search) to solve a continuously adapted MDP for explanation action and
explanation move selection. We present the model as well as first results from explanation interactions with
different kinds of simulated users.
1 INTRODUCTION
Current AI systems are increasingly required to be
explainable, i.e. to be understandable by stakehold-
ers when provided with some kind of additional ex-
planation. Such explanations can range from visu-
alizations of internal parameters, to dedicated anal-
ysis techniques to identify a classifier’s sensitivities,
to textual information on natural language requests.
Which kind of explanation is suited best depends on
different aspects including the to-be-explained object
as well as the recipient of the explanation (Gunning
et al., 2021). A recent trend in XAI is thus to con-
sider explanations as an adaptive and interactive pro-
cess (Miller, 2019). Ultimately, this requires a tech-
nical system and an end user to clarify the user’s in-
formation needs and to tailor the explanation in an
interactively co-constructed process (Rohlfing et al.,
2021). Yet, it is not clear how such a process can be
established and supported by an intelligent explana-
tion system.
We address this problem for the case of natural
language explanations that are constructed in a dia-
logical interaction between a human addressee (the
explainee, henceforth) and an A.I. system. That is,
we aim to support a natural language interaction that
a
https://orcid.org/0000-0001-5622-8248
b
https://orcid.org/0000-0002-4047-9277
is co-constructed by an intelligent agent and a user,
resulting in an effective and successfully personal-
ized explanation. We focus specifically on the prob-
lem of generating explanations in a way that is adap-
tive to the explainee’s understanding and information
needs, as they become apparent through the course
of a dialogical interaction. This requires an agent to
autonomously decide upon the explanation’s content
(what is to be explained next), the general strategy
(e.g. whether to introduce new information, to elab-
orate on previously given information, or to provide
an example), and the specific realization (the concrete
verbal utterance). Adaptivity must be enabled at each
of these levels. We will focus on the dialog level at
which two things are determined: the information that
needs to be explained next and how it is done best.
Both decisions depend on a model of the current situa-
tion as well as the partner. To that end, the explainee’s
understanding and other relevant characteristics are
extracted from the interaction by analysing the feed-
back and are stored in a dynamic partner model. As
this partner model becomes more and more specific
over time, the decision process and the partner model
influence each other. In result, the generation prob-
lem changes from time to time or, in other words, is
non-stationary.
Adopting a broad view on explanations, we de-
fine an explanation goal not only as to give reasons
(i.e. answering why-questions) but also to enable the
48
Robrecht, A. and Kopp, S.
SNAPE: A Sequential Non-Stationary Decision Process Model for Adaptive Explanation Generation.
DOI: 10.5220/0011671300003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 48-58
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

recipient to act or to help her understand (i.e. answer-
ing how-questions or what-questions). One argument
for this is that providing a why-explanation requires
a certain degree of common ground with regard to
what-/how-understanding. More generally, we build
on models of rational communication and treat the
generation of explanations as a problem of rational
decision-making. In this, an agent makes decisions
by considering possible actions and choosing the one
that maximizes a desired outcome weighed against its
potential costs (Russell and Norvig, 2021). The stan-
dard approach is to model this as a (partially observ-
able) markov decision process ((PO)MDP), whose so-
lution is an action policy that can be determined via
reinforcement learning (RL) (Sutton and Barto, 2018)
or through some form of (usually approximate) plan-
ning such as value iteration (Lapan, 2018) or Monte
Carlo tree search (Silver and Veness, 2010). A partic-
ular challenge arises when the environment dynam-
ics, i.e. the way specific actions bring about specific
effects, is changing over time. This is the case for the
co-constructed explanation process as outlined above
due to (1) the growing (non-)understanding of the ex-
plainee and (2) the correspondingly changing effects
of explanation moves the agent may take. Indeed, dif-
ferent explanation strategies lead to various results de-
pending on expertise, interest or communication skills
of the explainee (Buhl, 2001; Grice, 1975): While
presenting the information in small pieces and elab-
orating it with reformulations or additional informa-
tion might suit a novice explainee, it will be more and
more inappropriate as the explainee gets increasingly
informed.
In this paper we propose SNAPE, a model that for-
malizes explanation generation as sequential, hierar-
chical decision-making in a non-stationary environ-
ment. In this model, a global explanation plan deter-
mines blocks of information to be explained. Then,
local decision problems (MDPs) concerning the se-
lection of explanation actions and moves are contin-
uously revised and reformulated due to the changing
partner model, and then solved efficiently through on-
line planning. We demonstrate the approach in the
domain of explaining the board game Quarto!, which
is of a manageable size, comprises both rules as well
as strategic elements, and allows for testing the ex-
plainee’s understanding by letting her play the board
game subsequent to the explanation. We start by dis-
cussing related work and underlying concepts in Sec-
tion 2. Section 3 will describe the concept and struc-
ture of the model focusing on how it provides expla-
nations sequentially and adaptively, based on contin-
uous updates of a partner model. We will then present
first results (Section 4) obtained with the model in
simulations of explanation processes with different
explainees. We will also show dialogue examples dis-
playing different strategies SNAPE uses in result of
varying partner models. Finally, a conclusion and dis-
cussion of future plans is given in Section 5.
2 RELATED WORK
2.1 Explanation Generation
In an explanation, an explainer and an explainee
are interacting to establish sufficient understanding
(Rohlfing et al., 2021). The object to be explained
is referred to as the explanandum, while explanans
refers to the particular way how the explanandum is
explained. Generally, explanations can vary largely
with regard to the explainer’s stance or goal, or the
causal patterns laid out by the explanans (Keil, 2006).
Most current research in XAI looks at introspective,
post-hoc explanations of a single decision of an AI
system using, e.g., contrastive or counterfactual ex-
planation patterns. This is fueled by the intrinsic in-
terest of understanding deep neural networks (DNNs)
and related “blackbox” algorithms, but also by ex-
ternal requirements such as the General Data Protec-
tion Regulation (GDPR). Consequently, current ap-
proaches in XAI aim at creating transparency, in-
terpretability and explainability amongst others (An-
jomshoae et al., 2019; Stepin et al., 2021). We fo-
cus on achieving explainability, which is mainly con-
cerned with how to make a description understand-
able to the explainee (Rohlfing et al., 2021) through
an appropriate, adaptive explanation process.
An explanation process can be defined as a se-
quence of phases that consist of explanation and veri-
fication blocks (El-Assady et al., 2019). The optimal
pathway though an explanation and the best explana-
tion strategy can differ depending on the targeted level
of detail, the targeted explainee, or the desired level of
interactivity. Current work in XAI has started to de-
velop context-aware methods, making up 43% of ex-
planation studies, while user-aware methods are still
relatively underrepresented (only 10%) (Anjomshoae
et al., 2019). One major challenge for the latter is
that (1) there is not one global explanation that fits
all (Sokol and Flach, 2020), and (2) prior assump-
tions about an explainee (user models) need to be
adapted continuously as the explanation process un-
folds. Therefore an explanation cannot be fully pre-
planned. Recent research also has been directed to ex-
planations in human-robot interaction (Stange et al.,
2022) or to eliciting explanations towards an artifi-
cial explainee. In Zare et al. (2019) the agent learns
SNAPE: A Sequential Non-Stationary Decision Process Model for Adaptive Explanation Generation
49

a game by playing and asking questions to a human
explainer. Other approaches aim at developing an ar-
tificial explainer (Allameh and Zaman, 2021), e.g. in
the form of a chatbot that is giving in-game support
rather than an explanation for a given domain.
2.2 Markov Decision Processes
MDPs are a common approach to model sequen-
tial decision processes and agent-environment inter-
actions (Lapan, 2018), with only few explanation gen-
eration approaches using MDPs so far (Anjomshoae
et al., 2019). Classically, an MDP (Puterman and
Feinberg, 1994) is defined by a tuple < S, A, T, R >,
where S is a finite set of possible states and A is a
finite set of actions. The transition model T (s|a, s
0
)
describes the probability to reach a new state s
0
af-
ter performing action a in state s. The reward model
R(a, s) defines the immediate reward that is obtained
after performing action a in state s.
1
Various exten-
sions or sup-types of MDPs have been defined for
specific domains, two of which are relevant for the
present model are briefly discussed in the following.
2.2.1 Non-Stationary MDPs
MDPs typically assume the environment to be station-
ary, i.e the transition probability T (s|a, s
0
) to be con-
stant throughout the whole decision process. Like-
wise, A and S are assumed to be fixed. However, in
many real-life settings such as self-driving cars, stock
market forecasting, or dialogue management, the en-
vironment is non-stationary. Different approaches to
deal with non-stationary MDPs (NSMDPs) can be
used (Lecarpentier and Rachelson, 2019). One option
is to model several experts or policies and to compare
their predictions in order to minimize regret (Cesa-
Bianchi and Lugosi, 2006; Fruit et al., 2017). Usually
regret minimization is used in competitive domains
with at least one adversarial. A second approach
– called Hidden-Mode MDP (HM-MDP) (Hadoux,
2015) – is to break down the NSMDP into different
modes. Depending on the current mode the MDP is
in, the transition and reward model differ. HM-MDPs
have been used in several domains (Chades et al.,
2012) and are employed in our model to adapt the
transition probabilities according to the current part-
ner model. Note that this is different from using so-
called “non-stationary policies” (Scherrer and Lesner,
2012), which can change for certain parts of a deci-
sion sequence and were shown to be sometimes more
efficient than classical policies.
1
Alternate reward models may be R(s|a, s
0
) or R(s) de-
fined in regards to the domain.
No matter which kind of MDP is used, a crucial
question is how to solve them for a policy. Classi-
cal offline planning aims to find the optimal policy
beforehand. This is computationally costly in larger
state-action spaces and infeasible in non-stationary
environments, because each time the environment
changes a new policy needs to be determined. An al-
ternative is to use online planning with approximate
methods such as Monte Carlo Tree Search (MCTS)
(Pettet et al., 2022). This approach is described
along with suitable application domains in Section
2.2.3. Here, we employ MCTS within a hierarchical
model, in which local MDP models are formulated
with smaller action-state spaces so that MCTS is ap-
plicable.
2.2.2 Hierarchical MDPs
A key challenge with MDPs is that the state-action
space tends to increase rapidly. One approach to deal
with this, besides using Partially Observable Monte
Carlo Planning (POMCP) (Silver and Veness, 2010)
or combining RL and MCTS (Pettet et al., 2022), is
to use hierarchical MDPs. This has been proposed,
e.g., for a robot navigation task (Bakker et al., 2005):
The key idea is to group states into clusters, which are
states of a higher-level MDP but full state spaces of
lower-level MDPs. At the lower level, the state space
is decreased due to only solving the sub-problem of
the associated cluster. The idea of using a hierarchy
in an MDP is well established, for example in plan-
ning algorithms and decision-making. The challenge
is to cluster the correct states together. To that end,
Hierarchically Determinized MDPs (HDMDP) were
introduced (Barry et al., 2010). Further, higher level
clusters or macro-actions can be seen as local policies
for solving sub-problems of the MDP (Hauskrecht
et al., 2013). This allows for reusing the lower level
policy several times. Nevertheless, in some cases us-
ing macro-actions can be costly too and lead to a less
flexible and more abstract model (Hauskrecht et al.,
2013). Notwithstanding these problems, many ap-
proaches on modelling hierarchical MDPs have been
put forward (Kessler et al., 2017), all pointing out two
main advantages: (i) the reduction of state and ac-
tion spaces by breaking the problem down into sub-
problems and (ii) the reusability of higher level ac-
tions.
2.2.3 Monte Carlo Tree Search (MCTS)
MCTS provides a popular way of solving MDPs on-
line. A MCTS policy aims to find a balance between
searching for new (exploration) and trying promising
options (exploitation). Coulom (2007) first combined
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
50
Monte-Carlo evaluation with tree search, and Koc-
sis et al. (2006) introduced a first Upper Confidence
Bound Algorithm (UCT1) that treats the choice of a
child node as a multi-arm bandit problem. Generally,
the MCTS algorithm consists of four steps that are re-
peated in each iteration: selection, expansion, simula-
tion and backpropagation (Browne et al., 2012). The
first step of the algorithm is the selection. Starting at
the root node the algorithm moves down the tree until
it reaches a node that is expandable, which means it is
nonterminal and has unseen children. After selecting
the node it is expanded, which means that at least one
child node is added. How many children can be added
to the tree depends on the available actions. Starting
at the new node a simulation is run using the default
policy and the result of the simulation is propagated
back to the root node to update the probabilities.
3 THE SNAPE MODEL
In this section we introduce the SNAPE model which
formalizes adaptive explanation generation as a se-
quential non-stationary decision process. It builds on
the view that producing an explanation can be seen as
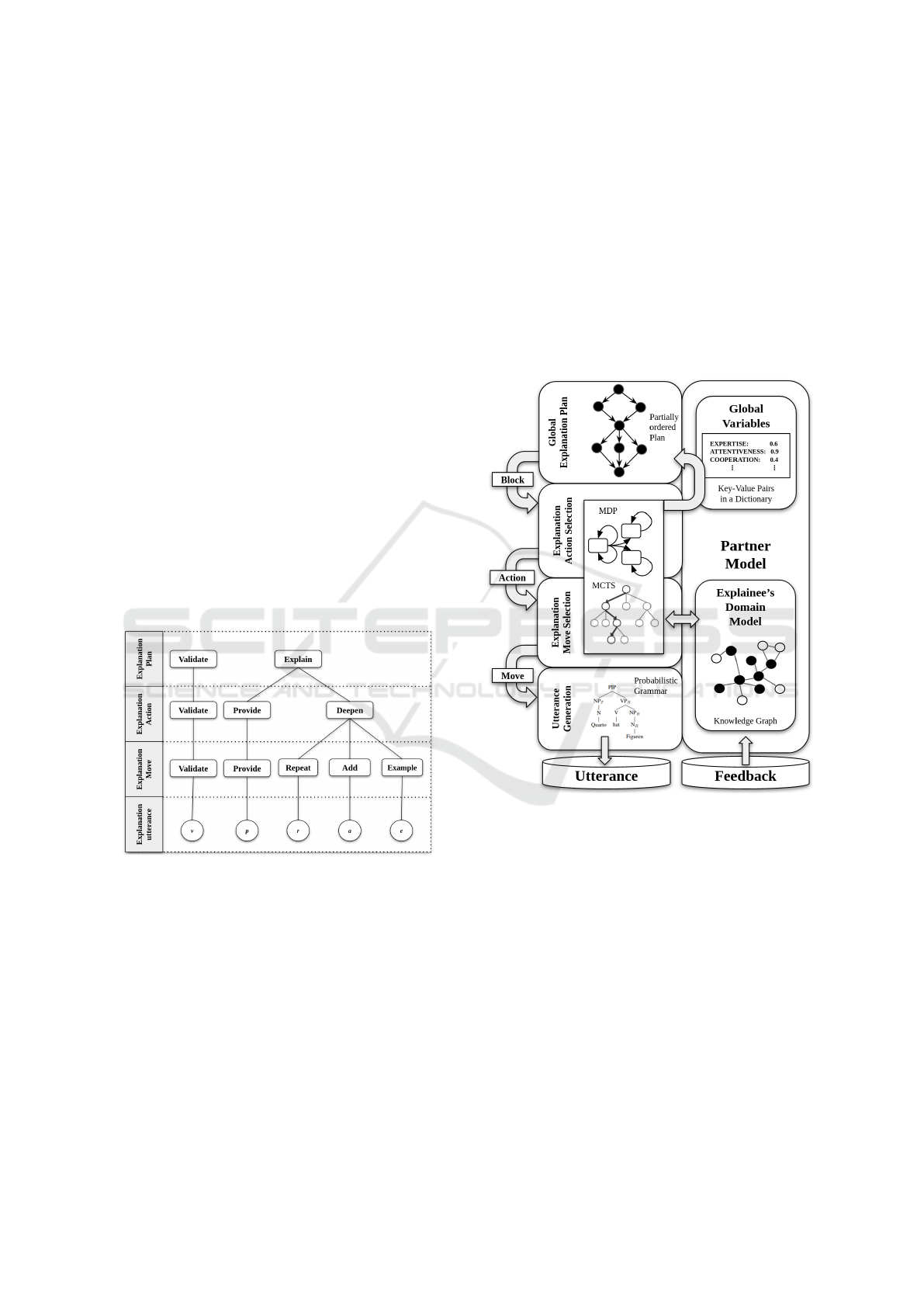
a hierarchical process (Figure 1).
Figure 1: Assumed hierarchical structure of an explanation.
At the highest level of an explanation, the ex-
plainer follows an explanation plan that determines
the next block. A block can either consist of ex-
plaining or verifying a given content (El-Assady et al.,
2019). While providing an explanation block is pos-
sible as long as the block is not assumed to be under-
stood by the explainee, providing a verification block
is possible only if a content has been explained before.
As soon as a block is selected, it is passed down to the
next level which determines an appropriate explana-
tion action. Here, the explainer either performs a val-
idate action or, for an explanation block, chooses be-
tween providing new content or deepening the current
one further. The action is transmitted to the explana-
tion move level, at which the explainer decides for the
best move to perform the given action. While, at the
explanation action level, the focus is on which infor-
mation to discuss, the move level evaluates how the
information can be presented best. Finally, the move
is passed down to the explanation utterance level,
where a verbal utterance is generated. In sum, the ex-
planation plan and action concern the content struc-
ture of the explanation, while the explanation move
and utterance levels mainly determine the linguistic
representation.
Figure 2: Structure of the SNAPE model.
The SNAPE model follows this hierarchical struc-
ture and formalizes the corresponding decision prob-
lems (Figure 2). At the highest level, a partially-
ordered plan (POP) specifies the logical order of the
explanation blocks. In a partially-ordered plan some
of the elements have a strict order, while others can
be swapped to a certain extent. Our approach to
form these explanation blocks differs from to the ones
described in Section 2.2.2 as we receive the clus-
ters from a data-set of human-human explanations of
Quarto! that we translated into an ontology using Web
Ontology Language (OWL 2) (Motik et al., 2009).
The knowledge graph built from this ontology can be
seen in Figure 3. While the ontology contains all the
information connected to the domain, the knowledge
graph includes only a subset of the obligatory triples
SNAPE: A Sequential Non-Stationary Decision Process Model for Adaptive Explanation Generation
51
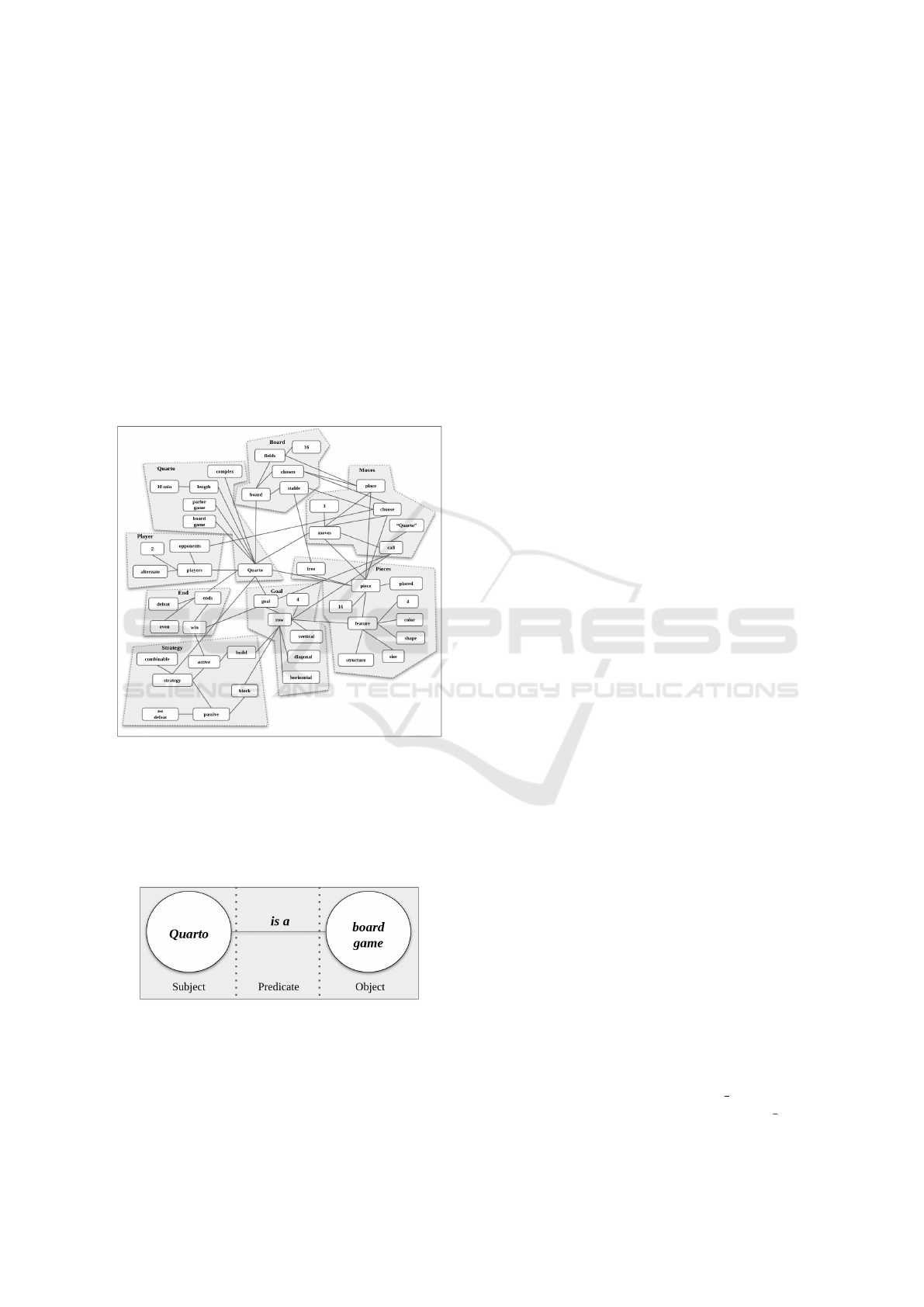
(e.g., information like the board is made of wood or
you can play Quarto online is included in the ontol-
ogy but not in the knowledge graph for the game ex-
planation). All the triples in the knowledge graph are
assigned to the corresponding explanation block. In
Figure 3 the blocks are indicated as gray areas. Corre-
spondingly, the state space of the MDP is a subgraph
of the knowledge graph and consists of a set of triples.
The global explanation plan determines which block
to perform next. The block includes a list of all triples
that have to be understood by the explainee in order
to complete the explanation successfully. The figure
illustrates that a block corresponds to a state at the ex-
planation plan level, while determining a state space
at the action and move selection level.
Figure 3: Knowledge graph of triples and associated expla-
nation blocks for the game domain.
Each triple describes a relation (predicate) be-
tween two elements (a subject and an object). For
illustration, the triple underlying the semantics of the
sentence ”Quarto is a board game.” can be seen in
Figure 4.
Figure 4: The semantics of the sentence ”Quarto is a board
game.” in the form of a (entity-relation) triple.
Given the block, an MDP is built for solving ex-
planation action and explanation move selection to-
gether. While the explanation action selection decides
which triple to deal with next, the explanation move is
more restricted to the linguistic representation of the
triple. After choosing which explanation move to per-
form on which triple the information is passed down
to the lowest level, the utterance generation. At the
current state the utterance generation is a dictionary of
move-template pairs, but will be extended to a proba-
bilistic grammar (Collins, 2011) with probability dis-
tributions being influenced by the partner model.
One key innovation of the SNAPE model is the
integration of an online partner model in the decision
process in order to allow for creating an explanation
adapted to the current state of the explainee’s under-
standing and preferences. Different features of the
partner model are directly connected to certain expla-
nation levels of the model, while others serve as input
for multiple levels (see below). In general, the part-
ner model consists of two components that represent
central assumptions an explainer holds about an ex-
plainee: (1) the partner’s domain model covering the
parts of the knowledge domain that are assumed to
be understood, and (2) more global features that de-
scribes the partner’s general ability and willingness to
follow the explanation. In its current state, the partner
model’s features are the explainee’s expertise, atten-
tiveness and cooperation. The expertise refers to the
general knowledge the explainee has of the domain.
The attentiveness assesses how easily the explainee
gets distracted, while cooperation estimates the extent
to which the explainee is willing to give information
about her current level of understanding.
Initially, the partner model starts as a very generic
model (based on prior assumptions) but is then up-
dated through the feedback the explainee provides.
How powerful the integration of the partner model is,
will become clear in the next two subsections that will
provide a closer look at the MDP, the partner model
and the adaptivity resulting from their combination.
3.1 Adaptive Explanation Action and
Move Selection
As the explanation block is given by the global expla-
nation plan, the set of triples and a list of templates
for each action is passed down to the explanation ac-
tion and move selection. Then, a local MDP is com-
posed whose state consists of all triples of the respec-
tive explanation block, along with a representation of
the level of understanding (lou) for each triple. In the
initial state all lou values are set to None. A list of
all the actions and their moves that can potentially be
performed at the current state is composed. Possible
actions always consist of a type (action type) and the
triple that is currently under discussion (action cud).
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
52

There are two actions available: provide and deepen,
which are mutually exclusive. Provide is available for
all triples with the value None, while deepen is avail-
able only if the triple has been introduced already.
Moves are more complex than actions. An explana-
tion move describes the way of how to perform the
action at the dialog level (see examples in Table 1)
and can be seen as sub-actions. This means that not
only the full explanation process but also the MDP has
a hierarchical structure with actions at the higher and
moves at the lower level. If the action deepen is cho-
sen all the moves (repeat, add, example) are possible
but with different transition probabilities and follow-
ing states.
Apart from the actions that are available, the MDP
needs to know about the likely results of perform-
ing an action-move pair. To that end, all actions and
moves available at the current state are simulated tak-
ing into account that an action can either be success-
ful and lead to a new state, or can be unsuccessful
so that the MDP remains in its current state. Cru-
cially, the transition probabilities depend on the part-
ner model’s value of attentiveness p
a
as shown in Ta-
ble 1. The action provide always leads to a new state,
where the level of understanding (lou) is the initial
value (lou
init
). The move repeat has a high probabil-
ity to result in a state change, as we assume a rep-
etition or reformulation does not need a high level
of attentiveness or focus. The move example has a
higher probability to fail than the repeat move, as it is
more complex and engages the user to actively trans-
fer knowledge.
2
The third move is to give additional
information about the triple. This is not necessarily
needed for the explanation but might help to under-
stand or connect the information to prior knowledge.
The transition probability of this move is in between
those of the other two moves. It needs more attentive-
ness than a repetition but less than an example.
Upon conveying information to the explainee, the
MDP changes to a new state that is also dynamically
determined based on the complexity of the triple (c
t
),
the expertise of the user (p
e
) and the kind of move
(see Table 1). The complexity of the triple is stored
in the dictionary and taken from human-human expla-
nations, triples that caused confusion or frequently led
to a misunderstanding are attached a high complexity
level. The expertise capture’s the explainee’s domain-
specific ability to understand. The kind of move is im-
portant as we hypothesise that different moves require
2
Also, examples tend to be longer than repetitions of
information. At the current state of the model this is im-
plicitly included in the complexity level of the triple, later it
will be encoded by the utterance complexity and influence
the probability distribution of the probabilistic grammar.
different levels of communicative activity and there-
fore lead to different improvements of the level of un-
derstanding (lou). If the current move is to repeat a
triple the level of improvement is comparatively low,
as a reformulation is not a very activating move for the
explainee. Giving an example does need a high level
of activity and therefore leads to a higher improve-
ment. Again to add further information is the move
that is in between. It is more active than a repetition,
but less active than the example.
Further, the MDP needs to define what a terminal
state looks like. In our case a state is terminal as soon
as all the values have exceeded a certain level of un-
derstanding lou (in our case 0.75). The last element of
the MDP that needs to be defined is the reward func-
tion, which assigns a reward to each possible state.
For the MCTS only the final reward is needed, which
in our case is the sum of all the rewards during the it-
eration. The reward is negative until the terminal state
is reached. A non-terminal reward is set to the differ-
ence between all triples that exceed the needed level
of understanding (0.75) and the full amount of triples.
The reward at a final state is set to 100.
The decision process runs as follows: The best
move (in terms of maximal expected reward) is cal-
culated using MCTS and then performed by process-
ing the template and offering the explainee the option
to provide feedback. Currently the user can provide
positive, negative or no feedback. If the feedback is
positive, the information is assumed to be grounded
(lou value of 0.9), while it is reset to its initial state
if the feedback is negative. If no feedback is given,
the MDP calculates a state parallel to the predicted
state as described above. Then the current state is
updated and the MCTS, again, finds the best move
to perform. As the current explanation block is fully
grounded, the MDP reaches its final state. Now the
partner model is updated and the global explanation
plan picks the next block to explain. How the partner
model update is works in detail will be content of the
next subsection.
3.2 Partner Model Update
As described above, different variables in the partner
model influence the model’s probability of changing
into a new state as well as the new state itself. In
result, changes to the partner model cause the gen-
eration process to be non-stationary by yielding new
MDPs that steer the explanation actions/moves for a
limited period of time. Initially, the partner model
holds predefined values and an empty domain model.
Then, the partner’s domain model is updated con-
stantly during the explanation process. Each triple
SNAPE: A Sequential Non-Stationary Decision Process Model for Adaptive Explanation Generation
53
Table 1: Overview of action-move combinations with examples, along with the (predefined) formulae for calculating new
states and transition probabilities of the adapted MDP.
Action-
Move
Example New State Transitions
Provide-
Provide
”To win you need to build a row.” lou
0
i
=
p
e
c
t
t(s
0
|s) = 1
t(s|s) = 0
Deepen-
Repeat
”You can win by creating a row.” lou
0
i
= lou
i
+
1−lou
i
c
t
∗
0.4+p
e
2
t(s
0
|s) = 0.9 ∗ p
a
t(s|s) = 1 − 0.9 ∗ p
a
Deepen-
Add
”A row has a length of 4 figures.” lou
0
i
= lou
i
+
1−lou
i
c
t
∗
0.6+p
e
2
t(s
0
|s) = 0.6 ∗ p
a
t(s|s) = 1 − 0.6 ∗ p
a
Deepen-
Example
”For example: If there are three
small figures in a row and you have
a small one, you can build a line.”
lou
0
i
= lou
i
+
1−lou
i
c
t
∗
0.9+p
e
2
t(s
0
|s) = 0.4 ∗ p
a
t(s|s) = 1 − 0.4 ∗ p
a
that is introduced (provide) is added to the knowl-
edge graph, each triple that is acknowledged with pos-
itive feedback or exceeds the needed lou is addition-
ally labelled as grounded. Every time an explanation
block is passed back to the global explanation plan
the global variables in the partner model are updated
as well. If the frequency of feedback given by the user
is high, the level of attentiveness rises, which results
in higher transition probabilities in the next MDP. In
contrast, the attributed expertise is mainly influenced
by the kind of feedback that is generated. Positive
feedback on a complex triple hints to a high level
of expertise, while the opposite, negative feedback
on an easy information, is an indication for a lower
level of expertise. Also it can be measured by asking
open questions about the explainee’s previous domain
knowledge (in our game domain, e.g., ”You probably
know Best of Four, right?”). This was observed a lot
in human-human game explanations.
3
Note also that
the selection of the next explanation block depends
on the current partner model and is hence subject to
changes due to partner model updates. Specifically,
whether to validate or to move on and explain the next
block is significantly influenced by the partner’s at-
tributed cooperation. The cooperation value of the
partner is derived from the quality of the produced
feedback (see below).
The detailed update rules for expertise E
b
and at-
tentiveness A
b
with respect to a block b are as follows
(|FB
p
|: number of positive feedback signals, |FB
n
|:
number of negative feedback signals, |FB| number of
all feedback signals including None):
3
This kind of questions is also a building block for ex-
plaining through analogy, which we leave to future work.
Expertise:
E
b+1
= E
b
∗
1
|FB
p+n
|
+
act
|FB
p+n
|
∗ (1 −
1
|FB
p+n
|
)
with
act = 0.5 +
tanh(2 ∗ pos − neg)
2
pos =
|FB
p
|
∑
i=1
c
i
, neg =
|FB
n
|
∑
i=1
4 − c
i
(1)
Attentiveness:
A
b+1
= (A
b
+
|FB
p+n
|
|FB|
) ∗ 0.5 (2)
4 RESULTS
In order to evaluate the SNAPE model we have imple-
mented the described approach and tested it in expla-
nation interactions with simulated explainees. Gen-
erally, our hypothesis is that the adaptive model will
be able to generate user-specific explanations that can
yield a better understanding of the domain, higher
user satisfaction, and trust. While this is left to an
evaluation study with human users, in this paper we
present first results to demonstrate the model’s ability
to adapt to different explainees and to produce accord-
ing explanations.
We created three partner models Harry, Ron and
Hermione (Table 2). Hermione is highly interested,
always stays focused and is an expert in nearly every-
thing. Harry often gets distracted and is not much of
an expert in the game domain. Finally, Ron does not
have a high level of attentiveness as he easily looses
track or gets bored when listening to an explanation,
but he has a high level of game expertise. Note that,
as we focus on the explanation blocks only, the co-
operation value is not considered here. Also, due to
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
54
the simplified feedback, it is currently not possible to
analyse the quality of feedback.
Table 2: The three partner models used for simulation.
Partner Attentiveness Expertise
Hermione 0.9 0.9
Ron 0.3 0.8
Harry 0.3 0.3
These models were used as different initial part-
ner model of the explainer. Further, during the expla-
nation process, feedback was generated according to
three different feedback distribution types (Table 3).
Table 3: The three kinds of feedback distribution.
FB Negative Positive None
A 0.2 0.6 0.2
B 0.01 0.39 0.6
C 0.39 0.01 0.6
In feedback type A there is a high frequency of
feedback overall, which would be correlated with a
high level of attentiveness. The feedback is mainly
positive, which should indicate a high level of exper-
tise. Feedback type B rarely produces feedback and
therefore displays a low level of attentiveness. If feed-
back is produced, it is mainly positive, this correlates
with a high degree of expertise. Finally, feedback type
C should correspond to a low level of both attentive-
ness and expertise.
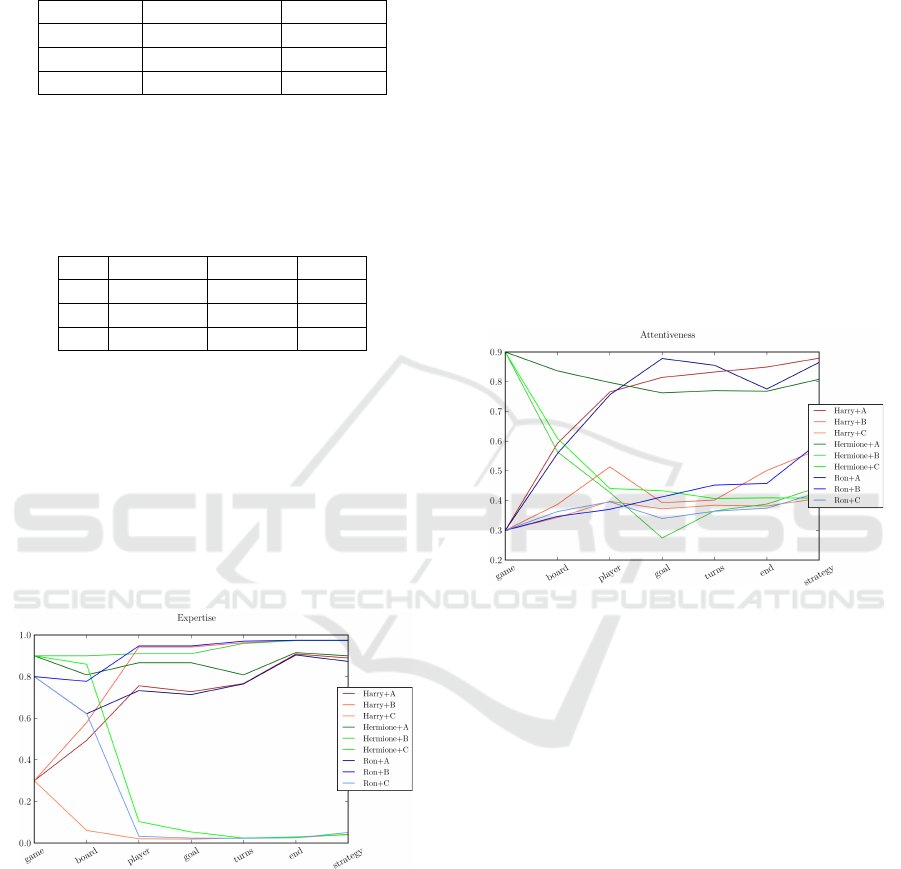
Figure 5: Expertise development during explanation.
In our evaluation, we have SNAPE explaining
Quarto starting out with one of the three partner mod-
els and then receiving feedback according to one of
the three types. If the feedback matches the initially
assumed partner model (i.e. Hermione - feedback
A; Ron - feedback B; Harry - feedback C), SNAPE
should explain suitably to whom it thinks it is talking
to. Adaptive explanation generation, however, would
be observed if the partner does not behave as expected
and the system changes its explanation behavior in re-
sult, i.e. produces feedback that does not match the
initial attributions.
We combined each initial partner model with each
of the possible feedback variants and let SNAPE ex-
plain for ten times each. As long as the partner model
matches the feedback type, we expect the develop-
ment of the partner model during the explanation to
be stable. In the other cases we expect the partner
model to update to the feedback and cause changes in
the explanation behavior, which will be shown in this
section as well.
Figure 5 shows how SNAPE adjusts the expertise
value to the unexpected feedback distribution. The
main changes appear in the updates after the first three
explanation blocks. It can also be observed that –
no matter with which initial partner model SNAPE
started – the same feedback leads to a more or less
equal expertise value in the end of the explanation.
Figure 6: Attentiveness development during explanation.
The second partner model value we were inter-
ested in was attentiveness, which differed in the feed-
back distributions as well. While B and C generated
comparably little feedback, we had a lot of feedback
in A. Figure 6 confirms that, no matter what the ini-
tial partner model was, SNAPE ends up at a higher
attentiveness value after getting feedback A. If the
initial partner model does not match the actual feed-
back, the partner model is adjusted after the first four
sequences.
To illustrate how SNAPE adapts to different part-
ners, we now compare two example explanations of
the explanation block board. SNAPE explains the
block to Hermione and Harry, respectively, who give
feedback in accordance to what SNAPE’s partner
model expects. First lets consider the conversation
between SNAPE and Hermione. We can see two in-
teresting behaviors in the dialog. The first is a proof
to what we previously expected: The explanation is
comparatively short and mainly consists of the move
provide (P), as Hermione tends to give positive feed-
back, which generates a high level of understanding
SNAPE: A Sequential Non-Stationary Decision Process Model for Adaptive Explanation Generation
55
(lou) and does not leave any need to deepen the con-
tent currently under discussion (cud).
After SNAPE provided the triple t1 (P-t1),
Hermione does not give any feedback, so he repeats
the triple. Then, even though there is still no feed-
back given by Hermione, SNAPE moves on to the
next triple. As he does not come back to the triple
during the explanation, it is taken as grounded.
Snape: "Quarto has a game board." (P-t0)
Hermione: +
Snape: "The unused figures are put next
to the board, the stable." (P-t1)
Hermione: None
Snape: "Quarto has a stable." (R-t1)
Hermione: None
Snape: "The board consists of individual
fields." (P-t2)
Hermione: +
This differs from the explanation behavior toward
Harry. As SNAPE provides the second triple (P-t2)
Harry does not give any feedback, so SNAPE gives
some additional information (A-t2). Harry again does
not provide any feedback and, in contrast to the pre-
vious example, SNAPE sticks to the triple currently
under discussion (cud) and generates an example (E-
t2) for the same triple.
Snape: "Quarto has a game board." (P-t0)
Harry: -
Snape: "The board consists of individual
fields." (P-t2)
Harry: None
Snape: "It consists of 16 fields." (A-t2)
Harry: None
Snape: "The board is structured like a
net for example." (E-t2)
Harry: +
Snape: "The board is made of wood."
(A-t0)
Harry: None
Snape: "The board is placed on the
table." (A-t0)
Harry: +
Snape: "The unused figures are put next
to the board, the stable." (P-t1)
Harry: None
Snape: "The stable is not part of the
actual board." (A-t1)
Harry: +
Now Harry gives positive feedback and SNAPE
moves to the next triple (A-t0). Also the explanation
is longer than the one for Hermione, which is due to
the lower expertise and attentiveness of Harry as the
explainee. The example also shows that SNAPE is
capable of changing to a new triple, even though the
item currently under discussion (cud) is not grounded,
and to come back to it at a later state.
5 CONCLUSIONS
In this paper we introduced SNAPE, an explana-
tion generation model using hierarchical decision pro-
cesses that integrate flexible, online partner models.
This online update results in a non-stationary deci-
sion process, which is realized sequentially by com-
posing and solving local, updated models of rational
decision-making in explanation generation and com-
munication. By embedding those in a hierarchical
decision model we illustrate everyday life explana-
tions, which are roughly preplanned, but provide a
detailed plan from sequence to sequence. Such hi-
erarchical decision models minimize state and action
space significantly so that local models can be solved
online using MCTS. We have shown how the sys-
tem updates its partner model and the corresponding
decision-making during the conversation, based on
initial assumptions as well as the kind and frequency
of the feedback provided by the explainee through-
out the running interaction. We also reported two
dialog examples produced for the same explanation
block with different underlying partner models. In
direct comparison it becomes clear how SNAPE al-
ready does adapt its explanation strategy to the part-
ner model of the user.
In future work, we will improve the feedback in-
terpretation to enable evaluation studies with human
explainees. By now we only allowed simplified feed-
back, such as ”+”, ”-” and ”None”. We want the
agent to be able to process backchannels as well as
more complex feedback, such as open questions, sen-
tence completion or examples generated by the ex-
plainee, which may indicate and influence the level
of cooperation. A high level of cooperation leads
to a smaller need for verification blocks and hence
is a partner model feature that influences the highest
level of global explanation planning. Further, the ut-
terance generation, which is currently based on pre-
defined templates, will be improved towards a prob-
abilistic grammar. This will allow for adapting to
the partner also at the level of lexico-grammatical
choices in accordance with the various levels of the
partner model already incorporated in SNAPE. Ongo-
ing work focuses on defining and including precondi-
tions for each triple into the model. The level of un-
derstanding (lou) of the preconditions directly influ-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
56

ences the reward that is given for a state. This results
in lower costs for generating triples for which more
preconditions have been introduced.
ACKNOWLEDGEMENTS
We are grateful to Fabian Heinrich and Markus
Rothg
¨
anger for help with developing the model, and
to Katharina Rohlfing, Heike Buhl, Josephine Fisher
and Erick Ronoh for valuable conceptual discus-
sions. This research was funded by the Deutsche
Forschungsgemeinschaft (DFG, German Research
Foundation): TRR 318/1 2021 – 438445824.
REFERENCES
Allameh, M. and Zaman, L. (2021). Jessy: A Conversa-
tional Assistant for Tutoring Digital Board Games. In
Extended Abstracts of the 2021 Annual Symposium
on Computer-Human Interaction in Play, pages 168–
173, Virtual Event Austria. Association fpr Comput-
ing Machinery.
Anjomshoae, S., Najjar, A., Calvaresi, D., and Fr
¨
amling,
K. (2019). Explainable Agents and Robots: Re-
sults from a Systematic Literature Review. In Pro-
ceedings of the 18th International Conference on Au-
tonomous Agents and MultiAgent Systems, AAMAS
’19, pages 1078–1088. International Foundation for
Autonomous Agents and Multiagent Systems.
Bakker, B., Zivkovic, Z., and Krose, B. (2005). Hierarchi-
cal dynamic programming for robot path planning. In
2005 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, pages 2756–2761.
Barry, J., Kaelbling, L. P., and Lozano-Perez, T. (2010).
Hierarchical Solution of Large Markov Decision
Processes. ICAPS-10 Workshop on Planning and
Scheduling Under Uncertainty, 2010, page 8.
Browne, C. B., Powley, E., Whitehouse, D., Lucas, S. M.,
Cowling, P. I., Rohlfshagen, P., Tavener, S., Perez, D.,
Samothrakis, S., and Colton, S. (2012). A Survey of
Monte Carlo Tree Search Methods. IEEE Transac-
tions on Computational Intelligence and AI in Games,
4(1):1–43.
Buhl, H. M. (2001). Partner Orientation and Speaker’s
Knowledge as Conflicting Parameters in Language
Production. Journal of Psycholinguistic Research,
pages 549–567.
Cesa-Bianchi, N. and Lugosi, G. (2006). Prediction, learn-
ing, and games. Cambridge University Press, Cam-
bridge. OCLC: 70056026.
Chades, I., Carwardine, J., Martin, T., Nicol, S., Sabbadin,
R., and Buffet, O. (2012). MOMDPs: A Solution for
Modelling Adaptive Management Problems. Proceed-
ings of the AAAI Conference on Artificial Intelligence,
26(1):267–273.
Collins, M. (2011). Probabilistic Context-Free Grammars
(PCFGs). Columbia University.
Coulom, R. (2007). Efficient Selectivity and Backup Oper-
ators in Monte-Carlo Tree Search. In van den Herik,
H. J., Ciancarini, P., and Donkers, H. H. L. M. J.,
editors, Computers and Games, pages 72–83, Berlin,
Heidelberg. Springer Berlin Heidelberg.
El-Assady, M., Jentner, W., Kehlbeck, R., Schlegel, U.,
Sevastjanova, R., Sperrle, F., Spinner, T., and Keim,
D. (2019). Towards XAI: Structuring the Processes of
Explanations. Proceedings of the ACM Workshop on
Human-Centered Machine Learning, Glasgow, UK,
4:13.
Fruit, R., Pirotta, M., Lazaric, A., and Brundskill, E. (2017).
Regret Minimization in MDPs with Options without
Prior Knowledge. Advances in Neural Information
Processing Systems, 30.
Grice, H. P. (1975). Logic and Conversation. Speech Acts,
3:41 – 58.
Gunning, D., Vorm, E., Wang, J. Y., and Turek, M. (2021).
DARPA’s explainable AI (XAI) program: A retro-
spective. Applied AI Letters, 2(4):e61.
Hadoux, E. (2015). Markovian sequential decision-making
in non-stationary environments: application to argu-
mentative debates. PhD thesis, Universit
´
e Pierre et
Marie Curie - Paris.
Hauskrecht, M., Meuleau, N., Kaelbling, L. P., Dean,
T., and Boutilier, C. (2013). Hierarchical Solution
of Markov Decision Processes using Macro-actions.
arXiv preprint arXiv:1301.7381, page 10.
Keil, F. C. (2006). Explanation and Understanding. Annual
Review of Psychology, 57(1):227–254.
Kessler, C., Capocchi, L., Santucci, J.-F., and Zeigler, B.
(2017). Hierarchical Markov decision process based
on DEVS formalism. In 2017 Winter Simulation Con-
ference (WSC), pages 1001–1012, Las Vegas, NV.
IEEE.
Kocsis, L., Szepesvari, C., and Willemson, J. (2006). Im-
proved Monte-Carlo Search. Univ. Tartu, Tech. Rep,
1:22.
Lapan, M. (2018). Deep reinforcement learning hands-
on: apply modern RL methods, with deep Q-networks,
value iteration, policy gradients, TRPO, AlphaGo
Zero and more. Packt Publishing Ltd.
Lecarpentier, E. and Rachelson, E. (2019). Non-Stationary
Markov Decision Processes, a Worst-Case Approach
using Model-Based Reinforcement Learning. Ad-
vances in neural information processing systems,
32:10.
Miller, T. (2019). Explanation in Artificial Intelligence: In-
sights from the Social Sciences. Artificial Intelligence,
267:1 – 38. arXiv:1706.07269 [cs].
Motik, B., Patel-Schneider, P. F., Parsia, B., Bock, C., Fok-
oue, A., Haase, P., Hoekstra, R., Horrocks, I., Rutten-
berg, A., Sattler, U., et al. (2009). Owl 2 web ontology
language: Structural specification and functional-style
syntax. W3C recommendation, 27(65):159.
Pettet, G., Mukhopadhyay, A., and Dubey, A. (2022).
Decision Making in Non-Stationary Environments
SNAPE: A Sequential Non-Stationary Decision Process Model for Adaptive Explanation Generation
57

with Policy-Augmented Monte Carlo Tree Search.
arXiv:2202.13003 [cs].
Puterman, M. L. and Feinberg, E. A. (1994). Markov De-
cision Processes: Discrete Stochastic Dynamic Pro-
gramming. SIAM Review, 38(4):689.
Rohlfing, K. J., Cimiano, P., Scharlau, I., Matzner, T.,
Buhl, H. M., Buschmeier, H., Esposito, E., Grim-
minger, A., Hammer, B., Hab-Umbach, R., Horwath,
I., Hullermeier, E., Kern, F., Kopp, S., Thommes, K.,
Ngonga Ngomo, A.-C., Schulte, C., Wachsmuth, H.,
Wagner, P., and Wrede, B. (2021). Explanation as a
Social Practice: Toward a Conceptual Framework for
the Social Design of AI Systems. IEEE Transactions
on Cognitive and Developmental Systems, 13(3):717–
728.
Russell, S. and Norvig, P. (2021). Artificial Intelligence,
Global Edition : A Modern Approach. Pearson
Deutschland.
Scherrer, B. and Lesner, B. (2012). On the Use of Non-
Stationary Policies for Stationary Infinite-Horizon
Markov Decision Processes. Advances in Neural In-
formation Processing Systems, 25.
Silver, D. and Veness, J. (2010). Monte-Carlo Planning
in Large POMDPs. Advances in Neural Information
Processing Systems, 23:9.
Sokol, K. and Flach, P. (2020). One Explanation Does Not
Fit All: The Promise of Interactive Explanations for
Machine Learning Transparency. KI - K
¨
unstliche In-
telligenz, 34(2):235–250.
Stange, S., Hassan, T., Schr
¨
oder, F., Konkol, J., and
Kopp, S. (2022). Self-Explaining Social Robots:
An Explainable Behavior Generation Architecture for
Human-Robot Interaction. Frontiers in Artificial In-
telligence, page 87.
Stepin, I., Alonso, J. M., Catala, A., and Pereira-Farina, M.
(2021). A Survey of Contrastive and Counterfactual
Explanation Generation Methods for Explainable Ar-
tificial Intelligence. IEEE Access, 9:11974–12001.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement Learn-
ing. The MIT Press, 2 edition.
Zare, M., Ayub, A., Wagner, A. R., and Passonneau, R. J.
(2019). Show me how to win: a robot that uses dialog
management to learn from demonstrations. In Pro-
ceedings of the 14th International Conference on the
Foundations of Digital Games, pages 1–7.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
58
