
Distributionally Robust Optimization of Adaptive Cruise Control Under
Uncertainty
Shangyuan Zhang
1,2 a
, Makhlouf Hadji
1 b
and Abdel Lisser
2 c
1
Institut de Recherche Technologique SystemX, 8 Avenue de la Vauve, 91120 Palaiseau, France
2
CentraleSupelec, L2S, Université Paris Saclay, 3 Rue Curie Joliot, 91190, Gif-sur-Yvette, France
Keywords:
Adaptive Cruise Control, Distributionally Robust Optimization, Stochastic Optimization, Autonomous
Vehicle.
Abstract:
Due to the recent advances in intelligent and connected vehicles, Adaptive Cruise Control (ACC) has become a
key functionality of advanced driver-assistant systems (ADAS) to enhance comfort and safety. The evaluation
of ACC’s efficiency and safety is also crucial for the industry to prove the reliability of its products. In our
paper, we propose a distributional robust optimization-based ACC reference generation model to produce
the optimal commands facing the uncertainty of sensors. By taking into account the uncertainty set with
knowledge of the first and second moments, the original optimization problem with chance constraints can
be simplified and solved more efficiently. Numerical experiments in a driving simulator illustrate that the
robustness of the results is largely increased by minimizing the risks of violation of safety constraints.
1 INTRODUCTION
Over the past decade, there has been a marked
increase in the development of connected and
intelligent driving technologies, which has garnered
significant interest from both industrial and academic
researchers. This results in various technological
breakthroughs and commercial solutions. The
development of intelligent applications in tandem
with new generations of cars (connected and semi-
autonomous) has changed the paradigm of driving
when ensuring and guaranteeing the safety of drivers
on different types of roads. Advanced Driver
Assistance System (ADAS) is one of the promising
applications that has been integrated into smart
vehicles in order to improve driving comfort and
safety. One of the most fundamental aspects of ADAS
is Adaptive Cruise Control (ACC), which has been
investigated extensively by researchers and engineers.
(Levine and Athans, 1966) is one of the oldest
articles invoking ACC and describing its objectives.
The authors of this reference claimed that the
objective of ACC is to maintain a safe distance
from a leading vehicle by adjusting the speed and
a
https://orcid.org/0000-0003-0230-8618
b
https://orcid.org/0000-0003-1048-753X
c
https://orcid.org/0000-0003-1318-6679
acceleration. In the situation in which there is no
leading vehicle, it should also maintain the desired
speed set by the driver or system. Nowadays, and
with the evolving of connected objects deployment,
ACC relies on two essential components represented
respectively by sensors to collect environmental
information and a controller to set inter-vehicle
spacing based on the collected information. Hence,
an ACC-enabled vehicle drives at a preset speed
(following a given trajectory) until detecting a leading
vehicle. Next to that, it switches the vehicle to
the distance regulation mode when activating its
ACC controller. This former will provide the
necessary safety distance and send other commands
to controllers.
In response to the need for improved driving
comfort and safety, researchers have put forth
numerous approaches to design adaptive cruise
control (ACC) systems that emulate the behavior
of expert human drivers. Therefore, ACC systems
are designed considering key factors such as energy
consumption, collision avoidance, etc. Then, it
becomes imperative to validate the proposed ACC
systems thoroughly and assess their performance
before deploying them in the market.
Nevertheless, the validation and evaluation process
comes with some drawbacks, such as real-world
road tests, which are expensive, time-consuming,
Zhang, S., Hadji, M. and Lisser, A.
Distributionally Robust Optimization of Adaptive Cruise Control Under Uncertainty.
DOI: 10.5220/0011670800003396
In Proceedings of the 12th International Conference on Operations Research and Enterprise Systems (ICORES 2023), pages 71-81
ISBN: 978-989-758-627-9; ISSN: 2184-4372
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
71
and can only cover a limited number of driving
scenarios. Thus, we conduct the validation process in
a simulator that can generate scenarios automatically
based on our needs. This validation forms part of
the functional testing of advanced driver-assistance
systems (ADAS) in order to provide feedback on
the system’s performance. This feedback may
include information on avoided potential collisions,
the rationality of the system’s decision-making, and
the identification of any potential flaws. The goal
of this testing is to ensure that the ADAS functions
properly and can provide a useful aid to human
drivers.
In our work, we propose a reference generator
that is used to evaluate the performance of an
ACC system. This reference generator generates
commands that serve as a benchmark for the ACC
system’s output. We then compared the reference
commands generated using different frameworks.
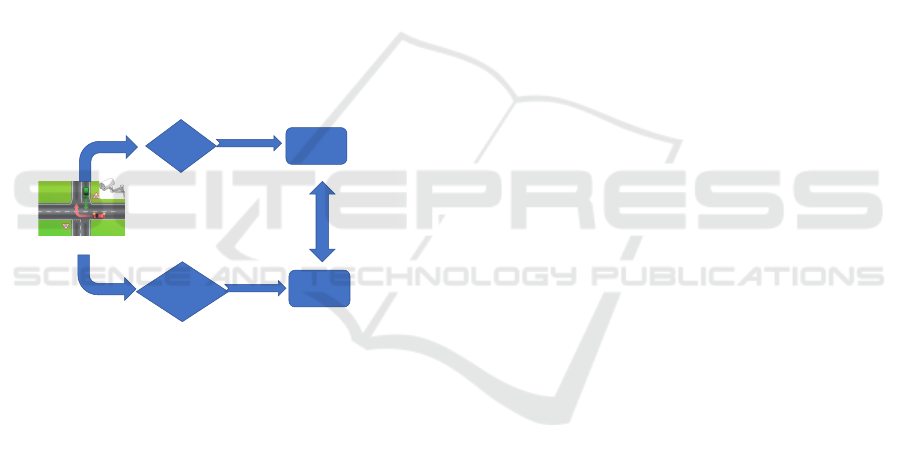
Our results show that the trajectory generated using
the DRO approach was more robust compared to the
other frameworks. Figure 1 shows the ACC validation
process with the generated benchmark.
ADAS
Reference
Generator
Commands
Reference
Commands
Driving Scenario
Simulations
Sensors
Comparison
and Validation
Figure 1: Illustration of how the ADAS validation process
occurs.
There are plenty of approaches (with advantages
and drawbacks) to cope with the problem of
generating reference trajectories using, for example,
sampling-based methods, graph-based methods, and
optimization-based approaches. Our goal is to
improve the comfort and safety of autonomous
vehicle by using optimization-based approaches to
identify rational values for acceleration, speed, and
relative position. The optimization-based approaches
allow us to tailor the different criteria of the objective
function and facilitate the constraints description and
formulation according to different driving scenarios.
Hence, in this paper, we propose an optimization-
based model for the generation of ACC reference
commands.
Usually, an ACC system relies on various types
of sensors, including cameras, lidar, radars, etc. The
performance of each considered sensor is influenced
by certain factors like its maintenance and the
environment in which it is used (see (Rasshofer et al.,
2011) for more details). Hence, collected data from
these sensors is subject to inherent inaccuracies that
must be taken into account when computations are
performed. Under the assumption that the first and
second moments of sensor errors are known, either
in full or in part, we propose a distributionally robust
optimization (DRO) model with chance constraints to
handle and integrate this uncertainty.
1.1 Our Contribution
According to the aforementioned details, we propose
in this paper two DRO approaches to formulate a
new ACC reference generator. Indeed, we formulate
both a deterministic optimization model (Zhang
et al., 2022) and twos DRO model which address
the challenge of sensor error uncertainty when the
first and second moments of the error distribution
are partially known. Our optimizations are based
on quadratic programming (QP) to determine the
most appropriate command to optimize the distance
between two vehicles while jointly satisfying all the
problem constraints at the same time. We provide
a comprehensive comparison of the obtained results
using our generated driving data, which simulates
realistic driving scenarios. We also emphasize the
added value of the DRO model compared to the
deterministic formulation.
The remaining of this paper is organized as
follows. Section 2 addresses mainstream ACC
algorithms that can be found in the literature. We
describe and discuss a new ACC validation model in
Section 3. Section 4 is dedicated to assessing the
performance of the proposed new solution and its
comparison to other existing models. We conclude
the paper in Section 5.
2 RELATED WORK
Research on ACC has been conducted from a number
of perspectives to ensure its effectiveness and safety
in complex real-life driving scenarios, including its
design, implementation, and validation.
A large number of ACC systems use optimal
control methods to achieve the desired outcome
(Chehardoli, 2020; Jiang et al., 2020; Zhu et al.,
2018). In recent years, model predictive control
(MPC) has also gained popularity due to its receding
horizon approach (Takahama and Akasaka, 2018;
Li et al., 2010; Naus et al., 2010). Other
features have also been investigated, including
driver behavior modeling(Varotto et al., 2020),
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
72
string stability(Khound et al., 2021), and collision
avoidance(Magdici and Althoff, 2017).
As a crucial part of autonomous driving,
validation of the functionality of the ADAS is also
a very critical task. It applies not only to the ACC
but also to other modules that require evaluation.
A unified test architecture and validation process
are presented in (Lattarulo et al., 2017), which
presents a comprehensive framework for evaluating
path planning and control algorithms. Similar works
can also be found in (Lattarulo et al., 2018) and
(Alnaser et al., 2019).
In addition to evaluating the overall testing
framework, it is essential to carefully examine
the individual functionality such as adaptive cruise
control (ACC) system. An experimental platform for
evaluating and demonstrating an optimization-based
ACC controller is presented in (Mehra et al., 2015),
while (Djoudi et al., 2020) presents a simulation-
based tool chain for generating reference data and
analysing test results. A number of other insightful
studies concerning the testing and validation of ACC
can be found in (Schmied et al., 2015; Shakouri
et al., 2015). In this paper, a DRO model is proposed
for ACC reference generation that takes into account
uncertainties with partial information. The results
of the DRO model can then be incorporated into the
validation process. To the best of our knowledge, no
prior work has been conducted on the application of
DRO to ACC reference generation.
DRO was first introduced by Scarf (Scarf, 1958)
in 1958 and widely applied in risk management. The
main requirement of this framework is to define a set
of probability measures, namely the uncertainty set,
that include the true stochastic model for the problem.
Furthermore, the problem is typically optimized using
a worst-case analysis over the choice of a distribution
from this set. This framework has attracted
considerable attention due to the advancement of
optimization techniques, and it has a wide range
of applications across a variety of fields nowadays
(Rahimian and Mehrotra, 2019). The uncertainty set
is normally constructed using historical data and is
known as a data-driven uncertainty set (Delage and
Ye, 2010; Mohajerin Esfahani and Kuhn, 2018; Miao
et al., 2021). By analyzing sensor errors in the ACC
system, we can apply the DRO framework to improve
the performance of our ACC reference generator.
3 PROBLEM FORMULATION
3.1 Overview
In the following, we rely on the usage of the provided
mathematical formulation of (Zhang et al., 2022) and
will address driving scenarios.
The objective of this section is to describe how we
model the ACC driving scenario and formulate the
related optimization problem. Note that the typical
ACC driving scenario involves two cars driving
simultaneously in one lane, namely the ego car and
the target car. It is the ego car that is equipped with
an ACC system, whereas the target car is the leading
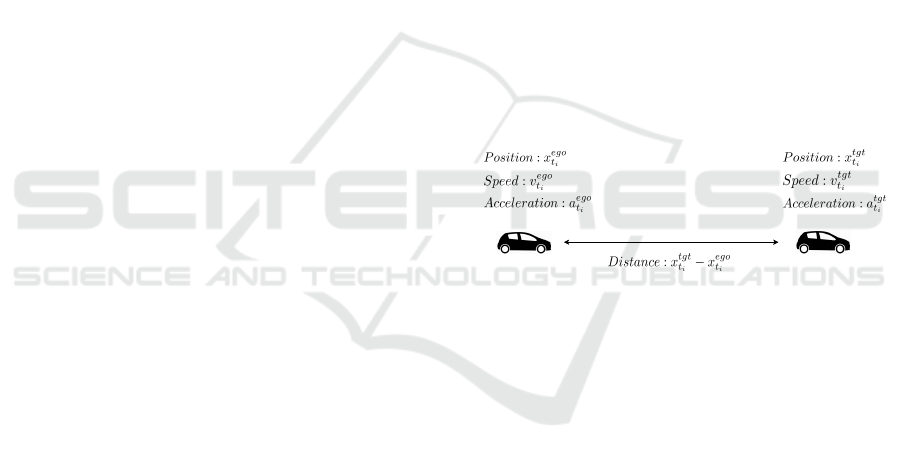
vehicle positioned in front. Figure 2 illustrates the
driving scenario, as well as the states of two cars at
the moment t
i
. The purpose of the ACC reference
generation is to generate a sequence of acceleration
commands, that is, the decision variables in our
optimization problem. The ego car’s ACC system
is designed to remain at a distance from the target
car while taking into account a variety of factors,
such as vehicle dynamics, driving comfort, and traffic
regulations.
Figure 2: ACC driving scenario at the moment t
i
.
Suppose that the total duration of a driving
scenario is T s composed of n sampling time dt,
i.e. T = ndt with a corresponding timestamp
[t
0
,t
1
,...t
i
,... t
n
] where t
i+1
= t
i
+ dt, ∀i ∈
{0,1,... n − 1}. At each moment t
i
, the ACC
of the ego car uses sensors to gather information
from the target car and generates the acceleration
commands. In the following, we list the parameters
and the decision variables used in our model.
The input parameters are given by the ego car
sensors, and the decision variables represent the ACC
optimal commands. The parameters of the ego car are
the initial position x
ego
t
0
, and the initial velocity v
ego
t
0
whilst the parameters of the target car are composed
of the position vector X
tgt
T
= (x
tgt
t
1
,x
tgt
t
2
,... x
tgt
t
n
)
T
, the
velocity vector V
tgt
T
= (v
tgt
t
0
,v
tgt
t
1
,... v
tgt
t
n−1
)
T
and the
acceleration vector A
tgt
T
= (a
tgt
t
0
,a
tgt
t
1
,... a
tgt
t
n−1
)
T
in the
whole driving scenario. The decision variable is the
ACC ego car acceleration commands vector A
ego
T
=
(a
ego
t
0
,a
ego
t
1
,... a
ego
t
n−1
)
T
.
Given the decision variable and the initial state of
the ego car, we can derive the velocity and the position
Distributionally Robust Optimization of Adaptive Cruise Control Under Uncertainty
73

of the ego car by the equations of motion. The ego car
velocity v
ego
t
i+1
at time t
i+1
is given by the velocity at the
previous sample time v
ego
t
i
and the acceleration a
ego
t
i
:
v
ego
t
i+1
= v
ego
t
i
+ a
ego
t
i
dt. (1)
The velocity for the whole driving scenario can be
written in matrix form as
V
ego
T
=
v
ego
t
0
.
.
.
v
ego
t
i
.
.
.
v
ego
t
n−1
=
v
ego
t
0
.
.
.
v
ego
t
0
+
∑
k=i−1
k=0
a
ego
t
k
dt
.
.
.
v
ego
t
0
+
∑
k=n−2
k=0
a
ego
t
k
dt
= dtK
n
A
ego
T
+ v
ego
t
0
1
n
,
(2)
where K
n
∈ R
n×n
and 1
n
∈ R
n×1
K
n
=
0 0 0 ... 0 0
1 0 0 ... 0 0
1 1 0 ... 0 0
.
.
.
.
.
.
.
.
.
1 1 1 ... 0 0
1 1 1 ... 1 0
(3)
1
n
=
1
1
.
.
.
1
. (4)
Similarly, the ego car position at time t
i+1
is given
by
x
ego
t
i+1
= x
ego
t
i
+ v
ego
t
i
dt +
1
2
a
ego
t
i
dt
2
. (5)
The corresponding matrix format for all time steps
is
X
ego
T
=
x
ego
t
1
.
.
.
x
ego
t
i
.
.
.
x
ego
t
n
=
x
ego
t
0
+ v
ego
t
0
dt +
1
2
a
ego
t
0
dt
2
.
.
.
x
ego
t
0
+
∑
k=i−1
k=0
v
ego
t
k
dt +
1
2
∑
k=i−1
k=0
a
ego
t
k
dt
2
.
.
.
x
ego
t
0
+
∑
k=n−1
k=0
v
ego
t
k
dt +
1
2
∑
k=n−1
k=0
a
ego
t
k
dt
2
= dtM
n
V
ego
T
+
1
2
dt
2
M
n
A
ego
T
+ x
ego
t
0
1
n
,
(6)
where M
n
∈ R
n×n
,
M
n
=
1 0 0 ... 0
1 1 0 ... 0
1 1 1 ... 0
.
.
.
.
.
.
.
.
.
1 1 1 ... 1
. (7)
We use Equation (2) to rewrite Equation (6) in
terms of the initial position, the initial velocity and
the acceleration vector, i.e.,
X
ego
T
= dtM
n
V
ego
T
+
1
2
dt
2
M
n
A
ego
T
+ x
ego
t
0
1
n
= dtM
n
(dtK
n
A
ego
T
+ v
ego
t
0
1
n
)
+
1
2
dt
2
M
n
A
ego
T
+ x
ego
t
0
1
n
= dt
2
(B
n
+
1
2
M
n
)A
ego
T
+ v
ego
t
0
dtC
n
+ x
ego
t
0
1
n
,
(8)
where B
n
= M
n
·K
n
∈ R
n×n
and C
n
= M
n
·1
n
∈ R
n×1
.
These parameters are summarized in Table 1.
In the following, we use the position and the
velocity vector of the ego car to formulate our
optimization problem.
3.2 Mathematical Modeling
In the sequel, we outline how the generation of the
ACC reference can be viewed as an optimization
problem.
min
A
ego
T
||Q A
ego
T
+ P|| (9)
s.t. dt
2
(B
n
+
1
2
M
n
)A
ego
T
≤ X
tgt
T
− v
ego
t
0
dtC
n
− (x
ego
t
0
+ d
s
)1
n
, (10)
− (v
max
+ v
ego
t
0
)1
n
≤ dtK
n
A
ego
T
≤ (v
max
− v
ego
t
0
)1
n
, (11)
− a
max
1
n
≤ A
ego
T
≤ a
max
1
n
, (12)
− j
max
dt1
n
≤ D
n
A
ego
T
≤ j
max
dt1
n
. (13)
The following part explains in detail how we
derive the objective function (9) and how constraints
(10, 11, 12, 13) are developed.
The objective of ACC is to maintain a safe
distance between the ego car and the target car. In
order to calculate the reference distance between the
ego car and the target car, we define two terms: the
inter-vehicle time tc (e.g., 3 seconds), which gives the
ego car enough time to brake and avoid a collision
with the target car, and the standstill distance δS to
ensure there is always enough room between the two
adjacent cars.
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
74

Table 1: Summary of used parameters and variables in our formulations.
Symbols Physical Meaning Relationship
Target Car
A
tgt
T
Acceleration profile during simulation A
tgt
T
= (a
tgt
t
0
,a
tgt
t
1
,... a
tgt
t
n−1
)
T
V
tgt
T
Speed profile during simulation V
tgt
T
= (v
tgt
t
0
,v
tgt
t
1
,... v
tgt
t
n−1
)
T
X
tgt
T
Position profile during simulation X
tgt
T
= (x
tgt
t
1
,x
tgt
t
2
,... x
tgt
t
n
)
T
Ego Car
A
ego
T
Acceleration profile during simulation A
ego
T
= (a
ego
t
0
,a
ego
t
1
,... a
ego
t
n−1
)
T
V
ego
T
Speed profile during simulation V
ego
T
= dtK
n
A
ego
T
+ v
ego
t
0
1
n
X
ego
T
Position profile during simulation dt
2
(B
n
+
1
2
M
n
)A
ego
T
+ v
ego
t
0
dtC
n
+ x
ego
t
0
1
n
J
ego
T
Jerk profile during simulation D
n
A
ego
T
At each moment t
k
, the reference distance of ACC
in platoons is defined by
d
re f
t
k
= (v
ego
t
k−1
− v
tgt
t
k−1
)tc +
1
2
(a
ego
t
k−1
− a
tgt
t
k−1
)tc
2
+ δS.
(14)
So the reference distance vector in the whole
driving scenario is :
D
re f
T
= tc(d tK
n
A
ego
T
+ v
ego
t
0
1
n
−V
tgt
T
)
+
1
2
tc
2
(A
ego
T
− A
tgt
T
) + δS1
n
= (dt ·tcK
n
+
1
2
tc
2
I)A
ego
T
−tcV
tgt
T
−
1
2
tc
2
A
tgt
T
+ (δS + v
ego
t
0
tc)1
n
.
(15)
Moreover, the current distance between the ego
car and target car is
D
vehicle
T
= X
tgt
T
− X
ego
T
= X
tgt
T
− [dt
2
(B
n
+
1
2
M
n
)A
ego
T
+ v
ego
t
0
dtC
n
+ x
ego
t
0
1
n
].
(16)
By combining (16) and (15), we obtain the
objective function (9):
min
A
ego
T
||D
vehicle
T
− D
re f
T
||
= min
A
ego
T
||X
tgt
T
− [dt
2
(B
n
+
1
2
M
n
)A
ego
T
+ v
ego
t
0
dtC
n
+ x
ego
t
0
1
n
] − [(dt ·tcK
n
+
1
2
tc
2
I)A
ego
T
−tcV
tgt
T
−
1
2
tc
2
A
tgt
T
+ (δS + v
ego
t
0
tc)1
n
]||
= min
A
ego
T
|| − (dt
2
B
n
+
1
2
dt
2
M
n
+ dt ·tcK
n
+
1
2
tc
2
I)A
ego
T
+ X
tgt
T
+tcV
tgt
T
+
1
2
tc
2
A
tgt
T
− δS1
n
− v
ego
t
0
tc1
n
− x
ego
t
0
1
n
− v
ego
t
0
dtC
n
||
= min
A
ego
T
||Q A
ego
T
+ P||,
(17)
where Q = −(dt
2
B
n
+
1
2
dt
2
M
n
+ dt · tcK
n
+
1
2
tc
2
I),
P = X
tgt
T
+ tcV
tgt
T
+
1
2
tc
2
A
tgt
T
− δS1
n
− v
ego
t
0
tc1
n
−
x
ego
t
0
1
n
− v
ego
t
0
dtC
n
and || ·|| is Euclidean norm.
In addition to the objective function (9), we
describe the following constraints
• Constraint (10) is the minimum distance
constraint that aims to prevent vehicles collisions.
It results from
D
vehicle
T
≥ d
s
1
n
. (18)
• Constraint (11) is the maximum velocity
constraint. Routes typically have a maximum
velocity limit which leads to the velocity
constraint. For a given speed limit v
max
, the
constraint is deduced from
||V
ego
T
||
∞
≤ v
max
. (19)
• Constraint (12) is the maximum acceleration
constraint. Car passengers’ comfort is impacted
by acceleration. Vehicle maneuverings like rapid
acceleration or braking should be avoided. Our
model proposes an acceleration limit of a
max
based on this motivation.
||A
ego
T
||
∞
≤ a
max
. (20)
• Constraint (13) is the maximum jerk constraint.
In jerk, we measure the acceleration variances,
which significantly affect the comfort level of
passengers. A maximum limit j
max
is required for
this constraint.
||J
ego
T
||
∞
≤ j
max
(21)
Since j
t
i
= (a
ego
t
i
− a
ego
t
i−1
)/dt, the jerk constraint
can be simplified to (13) where D
n
∈ R
n×n
D
n
=
1 0 0 ... 0 0
−1 1 0 . . . 0 0
0 −1 1 ... 0 0
.
.
.
.
.
.
.
.
.
0 0 0 ... 1 0
0 0 0 ... −1 1
. (22)
Distributionally Robust Optimization of Adaptive Cruise Control Under Uncertainty
75

Given the form of the objective function and
the constraints, our model is a convex quadratic
optimization problem.
In the next section, we will discuss the uncertainty
involved in ACC and how to handle it by stochastic
modeling with chance constraints.
3.3 Distributionally Robust
Optimization Model
3.3.1 Uncertainty Set with First and Second
Moments
The model presented above is deterministic, i.e., all
input parameters are known in advance. Real-life
autonomous vehicle problems, however, may include
different sources of noise caused by external factors,
such as weather, which may affect these parameters.
Model uncertainties can be addressed in a variety of
ways. In our work, we apply the robust optimization
framework to manage distribution-free uncertainties
in models.
In the following, we model the ACC problem
as a chance-constrained optimization problem. Our
hypothesis is that the target car’s position information
x
tgt
t
i
contains some noise when obtained from the ego
car’s sensor, and we only know the first two moments
of the distribution, the mean value µ
i
and the variance
σ
2
i
, respectively. Mathematically, the target car’s
position x
tgt
t
i
is a random variable with a distribution
measure F
i
over its outcome space. Thus, the mean
and variance of the target car’s position is µ
T
and σ
2
T
where
µ
T
=
µ
1
µ
2
.
.
.
µ
n
(23)
and
σ
T
=
σ
1
σ
2
.
.
.
σ
n
(24)
The objective function for this stochastic
optimization problem is
min
A
ego
T
||E(D
vehicle
T
− D
re f
T
)||
= min
A
ego
T
||µ
T
+tcV
tgt
T
+
1
2
tc
2
A
tgt
T
− δS1
n
− v
ego
t
0
tc1
n
− x
ego
t
0
1
n
− v
ego
t
0
dtC
n
− [dt
2
B
n
+
1
2
dt
2
M
n
+ dt ·tcK
n
+
1
2
tc
2
]A
ego
T
||
= min
A
ego
T
||Q A
ego
T
+ P
0
||,
(25)
where P
0
= µ
T
+tcV
tgt
T
+
1
2
tc
2
A
tgt
T
−δS1
n
−v
ego
t
0
tc1
n
−
x
ego
t
0
1
n
− v
ego
t
0
dtC
n
.
Let D
i
be the set of probability distributions with
mean µ
i
and variance σ
2
i
, and it’s defined as
D
i
=
(
E
F
i
[x
tgt
t
i
] = µ
i
,
F
i
E
F
i
[(x
tgt
t
i
− µ
i
)
2
] = σ
2
i
)
,i = 1,· · · , n.
(26)
The target car’s position x
tgt
t
i
∼ F
i
follows a
distributionF
i
with F
i
∈ D
i
.
Using Theorem 1 in (Ghaoui et al., 2003), the
minimum distance constraint (18) for each moment
t
i
can be expressed as a chance constraint (Prékopa,
2013) with a given a threshold α, i.e.,
inf
F
i
∈D
P
F
i
(D
vehicle
t
i
≥ d
s
) ≥ α, ∀t
i
= inf
F
i
∈D
P
F
i
(x
tgt
t
i
≥ x
ego
t
i
+ d
s
) ≥ α
= x
ego
t
i
+ d
s
≤ µ
i
− σ
i
r
α
1 − α
,
(27)
where the inf is taken with respect to all probability
distributions in D
i
.
For the whole driving scenario, the minimum
distance constraint in a matrix form is
dt
2
(B
n
+
1
2
M
n
)A
ego
T
+ v
ego
t
0
dtC
n
+
(x
ego
t
0
+ d
s
)1
n
≤
ˆ
X
tgt
T
,
(28)
where
ˆ
X
tgt
T
=
µ
1
− σ
1
q
α
1−α
µ
2
− σ
2
q
α
1−α
.
.
.
µ
n
− σ
n
q
α
1−α
. (29)
Since only the minimum distance constraint is
related to the position of the target car X
tgt
T
, all other
constraints remain unchanged.
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
76

3.3.2 Uncertainty Set with Unknown Moments
Here, we consider the case where the mean and
variance of the target car’s position x
tgt
t
i
are unknown
but limited in a specific range. This DRO model could
be applied to the scenario in which the sensor error is
unstable.
Supposing that the target car’s position x
tgt
t
i
is a
random variable, with an outcome space (Ω
i
,F
i
) and
a distribution measure F
i
over the space. The mean of
x
tgt
t
i
lies in an interval of size 2
q
γ
i
1
and centered at µ
i
,
and the upper bound of variance of x
tgt
i
is γ
i
2
σ
2
i
. We
define the uncertainty set D
i
as follows:
D
i
=
(
(E
F
i
[x
tgt
t
i
] − µ
i
)
2
≤ γ
i
1
,
F
i
E
F
i
[(x
tgt
t
i
− µ
i
)
2
] ≤ γ
i
2
σ
2
i
)
,i = 1,· · · , n.
(30)
The target car’s position x
tgt
t
i
∼ F
i
follows a
distributionF
i
with F
i
∈ D
i
.
As the mean position of the target car at time
t
i
is centered at µ
i
, we maintain the same objective
function as in Equation (25). By the result in (Peng
et al., 2021), the minimum distance constraint can be
transformed as follow
inf
F
i
∈D
i
P
F
i
(D
vehicle
t
i
≥ d
s
) ≥ α, ∀t
i
= inf
F
i
∈D
i
P
F
i
(x
tgt
t
i
≥ x
ego
t
i
+ d
s
) ≥ α
= x
ego
t
i
+ d
s
≤ µ
i
− σ
i
(
r
α
1 − α
q
γ
i
2
+
q
γ
i
1
),
(31)
For the whole driving scenario, the minimum
distance constraint in a matrix form is
dt
2
(B
n
+
1
2
M
n
)A
ego
T
+ v
ego
t
0
dtC
n
+
(x
ego
t
0
+ d
s
)1
n
≤
e
X
tgt
T
,
(32)
where
e
X
tgt
T
=
µ
1
− σ
1
(
q
α
1−α
q
γ
1
2
+
q
γ
1
1
)
µ
2
− σ
2
(
q
α
1−α
q
γ
2
2
+
q
γ
2
1
)
.
.
.
µ
n
− σ
n
(
q
α
1−α
p
γ
n
2
+
p
γ
n
1
)
. (33)
All other constraints remain unchanged since
uncertainty is not involved.
4 EXPERIMENTAL RESULTS
In numerical experiments, we randomly generate
various driving scenarios in a simulator and compare
the performance of the deterministic and the two
DRO models on those scenarios. To compare, we
evaluate the number of violated constraints in each
model on given driving scenarios. During the data
generation phase, different configurations of a driving
scenario are applied, including the ego car’s state and
the target car’s trajectory. The sensor error is also
included in the data. Once the driving scenarios are
prepared, we use a QP solver (Goldfarb and Idnani,
1983) to solve the formulated deterministic and DRO
models. To conclude, we compare the number of
violated constraints of the two models to demonstrate
the effectiveness of the DRO model.
For the generation of an ACC driving scenario,
two types of parameters are necessary: the parameters
related to the environment and to the vehicles.
The parameters related to the environment include
the simulation configuration and vehicle regulations,
such as the total scenario duration, velocity limit,
collision avoidance limit, etc. Those parameters
reflect the real-life driving rules and simulation
setting, and therefore they are fixed during numerical
experiments. The parameters related to the vehicles,
such as initial position, velocity and distance, vary in
each randomly generated instance due to the diversity
of driving scenarios. In order to simulate driving
situations realistically, the relationships between
randomly generated vehicle parameters should be
representative of real-world situations.
The sequel summarizes the parameters set up for
numerical simulations:
• Parameters related to the environment:
– Total duration of a scenario T : 2s.
– Sampling time step dt: 0.05s.
– Inter-vehicle time tc: 3s.
– Standstill distance σS: 3m.
– Minimum security distance d
s
: 10m.
– Maximum velocity v
max
: 30m/s.
– Maximum acceleration v
max
: 5m/s
2
.
– Maximum jerk j
max
: 5m/s
3
.
– DRO unknown moments parameter: γ
i
1
= 5 and
γ
i
2
= 5.
– Confidence level α: 0.9.
• Parameters related to the vehicles:
– Acceleration of the target car: independent
random variables following a normal
distribution with mean 0 and standard deviation
2, truncated from −5 to 5.
– Initial speed of target car and ego car:
independent random variables following a
normal distribution with mean 15 and standard
deviation 10, truncated from 5 to 25.
Distributionally Robust Optimization of Adaptive Cruise Control Under Uncertainty
77
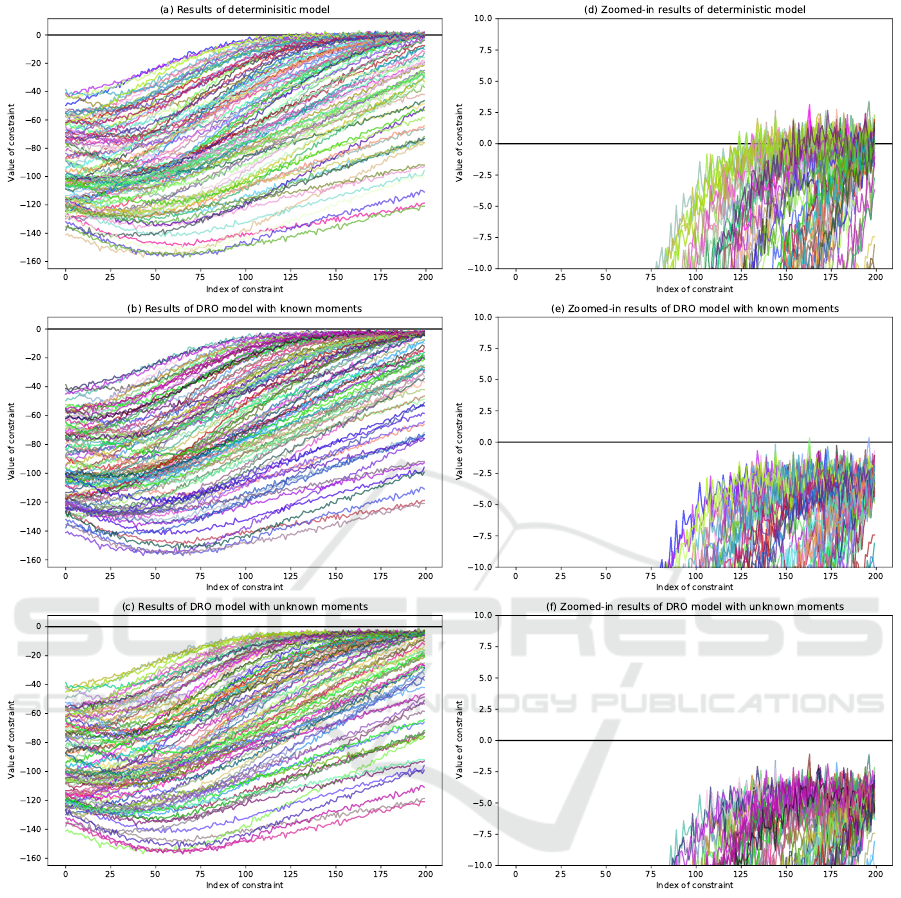
Figure 3: Constraint function values of all instances for deterministic and DRO models.
– Standard deviation of target car position σ: 1.
– Initial position of target car: random variable
following a normal distribution with mean 200
and standard deviation 1.
– Speed and position of target car: random
variables following normal distributions with
mean calculated by an initial value and the
acceleration vector, and standard deviation 1.
– Initial position of ego car: the initial position
of the target car minus a random variable
following a normal distribution with mean 100
and standard deviation 20, truncated from 50 to
150.
In the previous section, the optimal solution in each
generated ACC driving scenario can be obtained by
solving a QP problem. Several techniques exist for
solving this QP problem, which can be divided into
two categories: active-set methods and interior point
methods. We use QP solver with Goldfarb–Idnani
algorithm (Goldfarb and Idnani, 1983), which is a
dual active set method, in order to obtain the optimal
solution for our QP problems.
Firstly, we generate 100 random driving scenarios
based on the configuration above. Then our QP
solvers obtain the optimal reference of the scenarios
under the deterministic model and the two DRO
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
78
models, respectively. Considering the sensor error
in the input data, the obtained trajectory of our ego
car may violate the constraint (18) during the driving
scenario. Therefore, the performance of a model can
be measured by the number of times that constraint
(18) is violated throughout the scenario. A more
reliable model is one that produces fewer violations
of constraints statistically.
According to a numerical analysis of 100 random
instances solved with three models, only 50% of
the results are totally feasible, which means that the
constraint (18) is never violated during the scenario,
when solving with the deterministic model, whereas
98% of the results are totally feasible when solving
with the DRO model with known moments and 100%
when solving with the DRO model with unknown
moments.
Figure 3 shows a detailed analysis of
constraint violations across 100 driving scenarios.
Visualizations of the constraint violation value
d
s
− D
vehicle
T
1
n
, adapted from constraint (18), are
presented for the results of the three models. This
adapted constraint value must be less than or equal
to zero for the solution to be feasible (values greater
than zero cause a constraint violation). The constraint
value is shown in Figures 3(a), 3(b) and 3(c) for the
whole scenarios, whereas a partial zoom-in is shown
in Figures 3(d), 3(e) and 3(f) for easier reading. In
Figure 3, each curve in its own color displays the
constraint values of a driving scenario result, and
the x-axis represents the time index of constraints.
If the value at constraint index i exceeds 0, it means
that d
s
> D
vehicle
t
i
, i.e. the constraint (18) is violated
at this sampling time. It is evident from Figure 3
that the two DRO models produce significantly fewer
violations than the deterministic model.
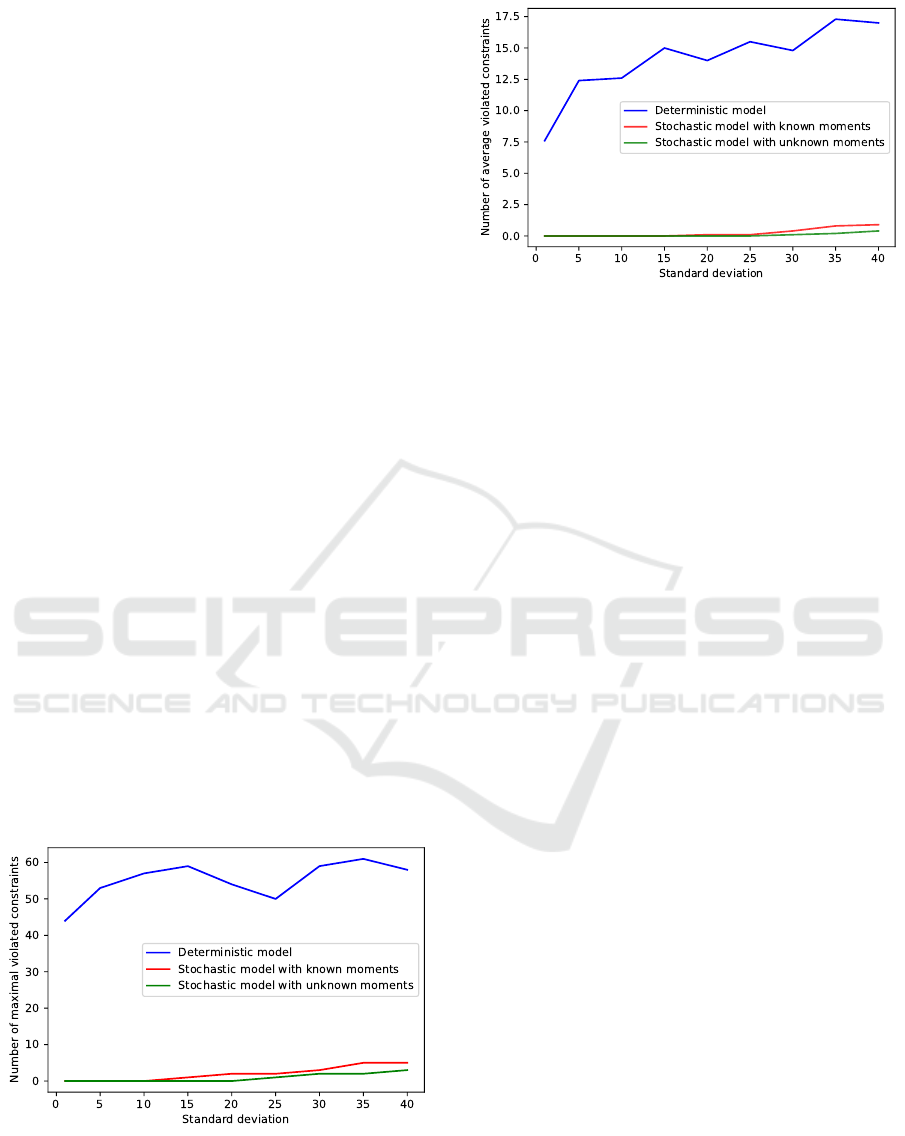
Figure 4: Maximal violated constraints under different
standard deviations.
In addition to the previous experiments, we
propose to evaluate the performance of the three
Figure 5: Average violated constraints under different
standard deviations.
proposed models under different sensor precision.
Keeping all other parameters unchanged, we vary the
standard deviation of the target car position, which
reflects the sensor’s precision, from 1 to 40. The
value of the standard deviation is gradually increased,
and we make 100 tests for each value. Figure 4 and
Figure 5 present the maximal and average number of
constraint violations for each model under different
standard deviations. In both cases, there are always
fewer constraint violations in the two DRO models
than in the deterministic model, which proves the
robustness of DRO approach for uncertainty.
5 CONCLUSION AND FUTURE
DIRECTIONS
The main contribution of this paper is a
distributionally robust optimization-based method
for ACC reference generation in driving scenarios
with uncertainties. In order to satisfy the safety
constraints, the reference generator takes into account
the sensor errors with partial information about its
distribution to produce optimal commands. The
results of the numerical simulations prove the
robustness of the DRO models by comparing their
performances with the deterministic model under
generated driving scenarios.
There are various further directions to explore for
the next step. For instance, we will consider other
assumptions for the sensor error and build an adapted
model for real-life scenarios. Additionally, we can
also apply this distributionally robust optimization
model in other modules of autonomous vehicles with
uncertainties in order to achieve better reliability for
some crucial functionalities.
Distributionally Robust Optimization of Adaptive Cruise Control Under Uncertainty
79

ACKNOWLEDGEMENT
This work was supported by the French government
under the "France 2030” program, as part of the
SystemX Technological Research Institute.
REFERENCES
Alnaser, A. J., Akbas, M. I., Sargolzaei, A., and
Razdan, R. (2019). Autonomous vehicles scenario
testing framework and model of computation. SAE
International Journal of Connected and Automated
Vehicles, 2(4).
Chehardoli, H. (2020). Robust optimal control and
identification of adaptive cruise control systems in the
presence of time delay and parameter uncertainties.
Journal of Vibration and Control, 26(17-18):1590–
1601.
Delage, E. and Ye, Y. (2010). Distributionally
robust optimization under moment uncertainty with
application to data-driven problems. Operations
research, 58(3):595–612.
Djoudi, A., Coquelin, L., and Regnier, R. (2020).
A simulation-based framework for functional
testing of automated driving controllers. In 2020
IEEE 23rd International Conference on Intelligent
Transportation Systems (ITSC), pages 1–6. IEEE.
Ghaoui, L. E., Oks, M., and Oustry, F. (2003). Worst-
case value-at-risk and robust portfolio optimization:
A conic programming approach. Operations research,
51(4):543–556.
Goldfarb, D. and Idnani, A. (1983). A numerically stable
dual method for solving strictly convex quadratic
programs. Mathematical programming, 27(1):1–33.
Jiang, J., Ding, F., Zhou, Y., Wu, J., and Tan, H.
(2020). A personalized human drivers’ risk sensitive
characteristics depicting stochastic optimal control
algorithm for adaptive cruise control. IEEE Access,
8:145056–145066.
Khound, P., Will, P., and Gronwald, F. (2021). Design
methodology to derive over-damped string stable
adaptive cruise control systems. IEEE Transactions
on Intelligent Vehicles, 7(1):32–44.
Lattarulo, R., Heß, D., Matute, J. A., and Perez, J. (2018).
Towards conformant models of automated electric
vehicles. In 2018 IEEE International Conference on
Vehicular Electronics and Safety (ICVES), pages 1–6.
IEEE.
Lattarulo, R., Pérez, J., and Dendaluce, M. (2017).
A complete framework for developing and testing
automated driving controllers. IFAC-PapersOnLine,
50(1):258–263.
Levine, W. and Athans, M. (1966). On the optimal error
regulation of a string of moving vehicles. IEEE
Transactions on Automatic Control, 11(3):355–361.
Li, S., Li, K., Rajamani, R., and Wang, J. (2010).
Model predictive multi-objective vehicular adaptive
cruise control. IEEE Transactions on control systems
technology, 19(3):556–566.
Magdici, S. and Althoff, M. (2017). Adaptive cruise control
with safety guarantees for autonomous vehicles.
IFAC-PapersOnLine, 50(1):5774–5781.
Mehra, A., Ma, W.-L., Berg, F., Tabuada, P., Grizzle, J. W.,
and Ames, A. D. (2015). Adaptive cruise control:
Experimental validation of advanced controllers on
scale-model cars. In 2015 American Control
Conference (ACC), pages 1411–1418. IEEE.
Miao, F., He, S., Pepin, L., Han, S., Hendawi, A., Khalefa,
M. E., Stankovic, J. A., and Pappas, G. (2021). Data-
driven distributionally robust optimization for vehicle
balancing of mobility-on-demand systems. ACM
Transactions on Cyber-Physical Systems, 5(2):1–27.
Mohajerin Esfahani, P. and Kuhn, D. (2018). Data-
driven distributionally robust optimization using
the wasserstein metric: Performance guarantees
and tractable reformulations. Mathematical
Programming, 171(1):115–166.
Naus, G., Ploeg, J., Van de Molengraft, M., Heemels, W.,
and Steinbuch, M. (2010). Design and implementation
of parameterized adaptive cruise control: An
explicit model predictive control approach. Control
Engineering Practice, 18(8):882–892.
Peng, S., Lisser, A., Singh, V. V., Gupta, N., and
Balachandar, E. (2021). Games with distributionally
robust joint chance constraints. Optimization Letters,
15(6):1931–1953.
Prékopa, A. (2013). Stochastic programming, volume 324.
Springer Science & Business Media.
Rahimian, H. and Mehrotra, S. (2019). Distributionally
robust optimization: A review. arXiv preprint
arXiv:1908.05659.
Rasshofer, R. H., Spies, M., and Spies, H. (2011).
Influences of weather phenomena on automotive laser
radar systems. Advances in Radio Science, 9(B.
2):49–60.
Scarf, H. (1958). A min-max solution of an inventory
problem. Studies in the mathematical theory of
inventory and production.
Schmied, R., Waschl, H., and Del Re, L. (2015). Extension
and experimental validation of fuel efficient predictive
adaptive cruise control. In 2015 American Control
Conference (ACC), pages 4753–4758. IEEE.
Shakouri, P., Czeczot, J., and Ordys, A. (2015). Simulation
validation of three nonlinear model-based controllers
in the adaptive cruise control system. Journal of
Intelligent & Robotic Systems, 80(2):207–229.
Takahama, T. and Akasaka, D. (2018). Model predictive
control approach to design practical adaptive cruise
control for traffic jam. International journal of
automotive engineering, 9(3):99–104.
Varotto, S. F., Farah, H., Bogenberger, K., van Arem, B.,
and Hoogendoorn, S. P. (2020). Adaptations in driver
behaviour characteristics during control transitions
from full-range adaptive cruise control to manual
driving: an on-road study. Transportmetrica A:
transport science, 16(3):776–806.
ICORES 2023 - 12th International Conference on Operations Research and Enterprise Systems
80

Zhang, S., Hadji, M., Lisser, A., and Mezali, Y.
(2022). Optimization of adaptive cruise control
under uncertainty. In International Conference
on Operations Research and Enterprise Systems
(ICORES).
Zhu, Y., Zhao, D., and Zhong, Z. (2018). Adaptive optimal
control of heterogeneous cacc system with uncertain
dynamics. IEEE Transactions on Control Systems
Technology, 27(4):1772–1779.
Distributionally Robust Optimization of Adaptive Cruise Control Under Uncertainty
81
