
Towards Explainability in Using Deep Learning for Face Detection in
Paintings
Siwar Bengamra
1,3 a
, Olfa Mzoughi
2 b
, Andr
´
e Bigand
3 c
and Ezzeddine Zagrouba
1 d
1
LIMTIC Laboratory, Higher Institute of Computer Science, University of Tunis El-Manar, Ariana, Tunisia
2
Prince Sattam Bin Abdulaziz University, Kingdom of Saudi Arabia, Saudi Arabia
3
LISIC Laboratory, University of the Littoral Opal Coast (ULCO), Calais Cedex, France
Keywords:
Explainable Artificial Intelligence (XAI), Perturbation-Based Explanation Method, Object Detection, Painting
Images.
Abstract:
Explainable Artificial Intelligence (XAI) is an active research area to interpret a neural network’s decision
by ensuring transparency and trust in the task-specified learned models. In fact, despite the great success of
deep learning networks in many fields, their adoption by practitioners presents some limits, one significant of
them is the complex nature of these networks which prevents human comprehension of the decision-making
process. This is especially the case in artworks analysis. To address this issue, we explore Detector Random-
ized Input Sampling for Explanation (DRISE), a visualization method for explainable artificial intelligence to
comprehend and improve CNN-based face detector on Tenebrism painting images. The results obtained show
local explanations for model’s prediction and consequently offer insights into the model’s decision-making.
This paper will be of great help to researchers as a future support for explainability of object detection in other
domain application.
1 INTRODUCTION
Deep learning models have shown great success in
various computer vision applications such as image
classification, semantic analysis and object detection.
However, alongside their impressive performances
and their increasing applicability, the deep neural net-
works are perceived as ”blackbox” model and diffi-
cult to interpret and to explain to the end users due
to its high non-linear computations. Thus, by debug-
ging and auditing the model, explainability can detect
faulty behavior important for performance improve-
ment. The poor explainability could also decrease hu-
man trust in the model with a risk of abandoning its
use, especially in critical applications such as medi-
cal imaging since clinicians confidence is necessary
for adoption (Tulio Ribeiro et al., 2016). The demand
of eXplainable Artificial Intelligence (XAI) is becom-
ing increasingly essential for model prediction as the
deep neural networks become the algorithm of choice
for models. A popular approach for explanation of the
a
https://orcid.org/0000-0001-5546-5292
b
https://orcid.org/0000-0001-8758-9740
c
https://orcid.org/0000-0002-3165-5363
d
https://orcid.org/0000-0002-2574-9080
deep learning model is the use of attribution principle
which aims at computing scores over pixels of the in-
put image, reflecting the importance of each pixel to
the output of the model (Petsiuk et al., 2021). The
arrangement of the ranking of all input pixels forms
a heatmap also called pixel attribution map, saliency
map, or more generally an explanation map.
In particular, the object detection in Tenebrism
paintings presents considerable challenges according
to large variation of contrast, limited color palette and
limited number of available images (Mzoughi et al.,
2018; Gamra et al., 2021). The great success that
deep Convolutional Neural Networks (CNNs) have
achieved for object detection in Tenebrism images
(Gamra et al., 2021) raises fundamental questions on
the internal working. For example, how the hidden
layers process this kind of images? Is there a deci-
sive hidden layer or stage (i.e. serie of hidden lay-
ers) in the network’s architecture? What were the
features that contributed to the model’s output for a
given such input (i.e. Tenebrism painting). Is all sub-
regions within the object’s bounding box are equally
important for the model decision? These questions
become more important as the importance of object
detection in Tenebrism images based deep learning
increases. Interestingly, in this art painting domain,
832
Bengamra, S., Mzoughi, O., Bigand, A. and Zagrouba, E.
Towards Explainability in Using Deep Learning for Face Detection in Paintings.
DOI: 10.5220/0011670300003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 832-841
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

explainability methods can bring benefits both to the
model performances improvement and user trust in-
crease. Firstly, this can help the researchers to analyze
and justify object detection results by providing the
required information about feature extraction. An en-
hanced control can also be ensured by identifying and
correcting unexpected behaviour. Finally, explaining
and understanding the internal mechanics could of-
fer possibilities to improve the model. For example,
understanding outliers or missing values allows users
know how to make the model smarter.
In this paper, we focus on understanding how face
detector models based deep learning work and pro-
ducing insights into model’s decision process such as
source of failures. So we investigate an implementa-
tion of DRISE (Petsiuk et al., 2021) to generate visual
explanation for our face detection results, then use
this for models comparison and failure’s source in-
vestigation. The choice of this method was motivated
by adopting the attribution approach based perturba-
tion. From the few previous perturbation-based meth-
ods intended for object detectors, we find the D-RISE
(Petsiuk et al., 2021) method particularly interesting
since it is based on pixel-wise perturbation promising
to generate saliency maps more accurately in terms
of location. The rest of the paper is organized as fol-
lows. Section 2 briefly review the existing works em-
ploying explainability in painting images. Then, sec-
tion 3 reviews and discusses the literature on explain-
ability methods. A detailed description of the DRISE
method will be present in section 4. Section 5 pro-
vides experimental results and analysis. Concluding
remarks and potential future research directions are
presented in section 6.
2 RELATED WORKS
Despite the considerable amount of works and sur-
veys devoted to generate explanations for deep CNNs,
little attention has been paid to explain the model’s
predictions in paintings to human users (see table 1).
This section surveys the related previous research
in the field of explainability deep CNNs used for art-
work analysis tasks. In (Cetinic et al., 2019), the
authors investigated an attention mechanism in or-
der to highlight the regions responsible for predict-
ing the aesthetic, sentiment, and memorability scores
in the context of art history. The obtained attribu-
tion maps were generated by computing probability
weight for each image location based on image fea-
tures, hidden layers and softmax function. The ob-
tained attribution maps was a good yardstick to com-
pare the used CNN models. In a recent work (Sura-
paneni et al., 2020), the Gradient Weighted Class Ac-
tivation Maps (GradCAM) method (Selvaraju et al.,
2017) has shown its effectiveness to add transparency
and explainability into a deep learning model used
for classifying artworks. Earlier, in (Pinciroli Vago
et al., 2021), the authors used Class Activation Maps
(CAM) method (Zhou et al., 2016) to explain how the
classification of characters in Christian art paintings
works by localizing areas of a painting contributing
the most to the output result. Several CAM variants
such as GradCAM++ (Chattopadhay et al., 2018) and
Smooth GradCAM++ (Omeiza et al., 2019) are com-
pared in terms of their capacity to identify the icono-
graphic features required for the classification task.
3 STATE OF THE ART
EXPLAINABILITY METHODS
Two broad categories of attribution-based explana-
tion methods exist, namely grdient-based methods
and perturbation-based methods (see figure 1).
3.1 Gradient-Based Methods
Gradient-based methods (or Backpropagation-based
methods) compute the attribution scores by calculat-
ing the gradients of the model’s output with respect to
the extracted features or input via back-propagation
algorithm. The paper (Simonyan et al., 2014) pro-
vides a simple method for generating saliency map by
differentiating the output of the model with respect to
the input. Later, several methods (Springenberg et al.,
2014; Zeiler and Fergus, 2014; Smilkov et al., 2017)
have been proposed to enhance the saliency maps
by reducing the visual noise. Some trend to modify
the gradients of ReLU functions by removing nega-
tive values during the back-propagation computation,
while others average the gradient over multiple inputs
with additional noise. Particularly, Class Activation
Mapping based methods (Zhou et al., 2016), abbre-
viated as CAM, perform Global Average Pooling on
the last feature map and pass the pooled features to the
fully connected layer. Then, the predicted class score
is mapped back to the previous convolutional layer to
generate the importance maps. The application of the
(Zhou et al., 2016) method has been limited to spe-
cific CNN architectures trained with a Global Average
Pooling (GAP) layer injected between the last convo-
lutional layer and the final fully connected layer. Sev-
eral more sophisticated methods have subsequently
been proposed. For example, GradCAM (Selvaraju
et al., 2017) was a generalization of CAM that can
generate visualizations for any classification CNN, re-
Towards Explainability in Using Deep Learning for Face Detection in Paintings
833

Table 1: Summary of papers focusing on explaining deep neural networks in painting.
Reference Explainability method Task Artwork dataset Evaluation method
(Pinciroli Vago et al.,
2021)
CAM, GradCAM, Grad-
CAM++, and Smooth
GradCAM++
Classification of
iconographic ele-
ments
Christian art paintings - Qualitative analysis
- Quantitative analysis:
Intersection Over Union,
Bounding box coverage,
Irrelevant attention
(Surapaneni et al.,
2020)
GradCAM Image classification Paintings from the Met’s
online collection
Qualitative evaluation
(Cetinic et al., 2019) Soft attention mecha-
nism
Predicting aesthetic,
sentiment, and mem-
orability scores
Paintings from WikiArt
collection- fine Art
Qualitative evaluation
gardless of its architecture. GradCAM++ (Chattopad-
hay et al., 2018) presents also an extension of the
GradCAM that can generate improved visual expla-
nations using a weighted combination of the positive
partial derivatives. Other extensions of CAM pro-
posed the modification of back-propagation rules to
have a probabilistic or local approximation backprop-
agation scheme. For example, in Excitation Backprop
(Zhang et al., 2016), authors use stochastic sampling
process to integrate the forward activations and back-
propagated gradients efficiently.
3.2 Perturbation-Based Methods
Perturbation-based methods (or occlusion-based
methods) compute the attribution of input pixels by
perturbing their values (e.g. by occlusion, adding
noise, blurring or modifying certain input pixels)
and record the effect of these changes on the model
performances (Ivanovs et al., 2021). This kind of
methods performs explanation of the model viewed
in terms of its inputs and outputs, without access
to its internal functioning. Significant research on
perturbation-based methods has been carried out.
For example, (Zeiler and Fergus, 2014) proposed the
occlusion method, which simply modify different
contiguous rectangular patches of the input image
with a given baseline (e.g. all zero patch) and
evaluate the effect of this perturbation on the target
output. Another explainability method is LIME
(Local Interpretable Model agnostic Explanations)
(Ribeiro et al., 2016) which divides the image into
interpretable components (contiguous superpixels),
generates a data set of perturbed images by masking
some of the interpretable components and predicts
the class probabilities. A linear model is then trained
on this data set and the superpixel weights of that
linear model are presented as an explanation of
the prediction. Recently, Petsiuk et al. (Petsiuk
et al., 2018) have proposed RISE (Randomized Input
Sampling for Explanation of Black-box Models) as a
method for classification decisions explanation. The
RISE method element-wise multiply the input image
with several random masks and pass the resulting
perturbed images to the model. The saliency map is
computed as a weighted sum of random masks, where
weights are probability-like score for the masked
images with respect to each class. More Recently, an
extension of the RISE method (Petsiuk et al., 2018) to
object detectors, called Detector Randomized Input
Sampling for Explanation (D-RISE), is proposed in
(Petsiuk et al., 2021).
3.3 Discussion
Although there are many interesting explainability
methods, a discussion on the two categories of meth-
ods described previously is required to understand the
differences and similarities between them. For the
gradient-based methods, the main advantage is the
computational speed, however, its drawbacks should
also be considered for application. In fact, the gra-
dient in discontinuities creates noisy saliency maps,
especially in case of large deep neural networks (An-
cona et al., 2019). Moreover, many backpropagation-
based methods are limited to certain network architec-
tures and/or layer types, and therefore are restricted
in their use. For example, Guided backpropagation
(GuidedBP) (Springenberg et al., 2014) is limited to
CNN models with ReLU activation. GradCAM (Sel-
varaju et al., 2017) is also limited to specific architec-
tures which use the AveragePooling layer to connect
convolutional layers to fully connected layers. Addi-
tionally, it is still very challenging to determine the
validity of gradient-based methods since they do not
directly measure the effect of perturbing input images
(Nielsen et al., 2022). Fo object detection explain-
ability, it is not possible with gradient-based method
to produce visual explanation for an arbitrary bound-
ing box (i.e. not detected by the model) since there
is no starting point to propagate from (Petsiuk et al.,
2021).
Compared to the gradient methods, perturbation-
based methods are totally independent of the model’s
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
834
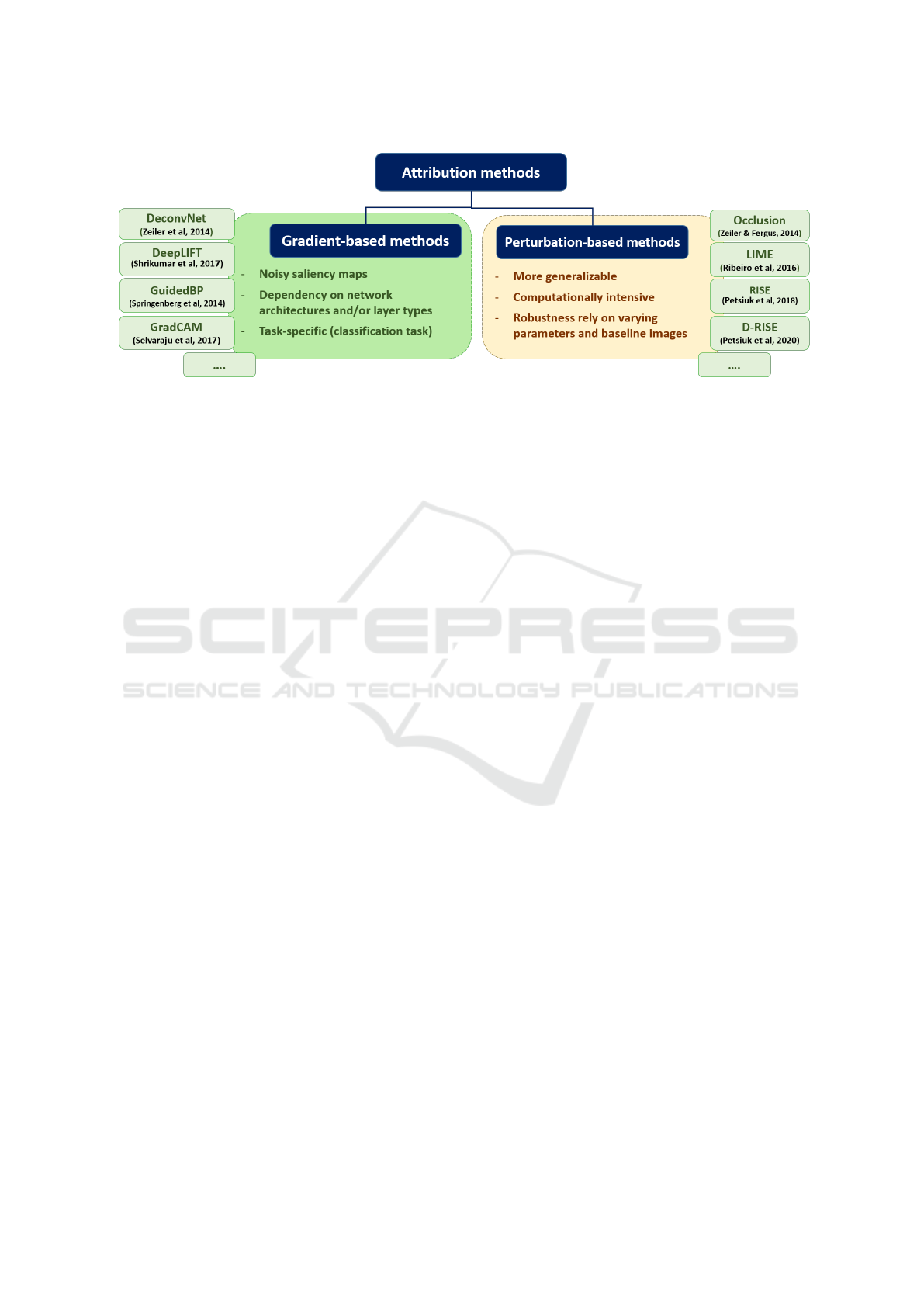
Figure 1: Categories of attribution methods.
architecture. An important advantage of perturbation-
based methods is that do not require access to the in-
ternal parts of the model for explanation, and there-
fore are used to explain almost deep neural networks.
Moreover, perturbation-based algorithms have be-
come quite popular due to their effectiveness and ease
of implementation (Qiu et al., 2021). On the other
hand, it should pointed out that explanation based per-
turbation lacks consistency in the explanation. In fact,
many choices of parameters lead to the divergence of
saliency maps (Brunke et al., 2020; Thakur and Fis-
chmeister, 2021). For example, the number of iter-
ations used for explanation of the same image could
result in different salient region detection. Attention
should also be paid to the underestimation of the pixel
importance values by not considering all perturba-
tion directions (Kim et al., 2021). It is also to note
that perturbation based methods tend to be very slow
as the number of images pixels (or features) to test
grows. Finally, a special attention should be given to
the scope and shape of the perturbations which affect
the granularity of the output saliency map (Ivanovs
et al., 2021). Pixel-wise perturbation produce accu-
rate saliency maps in terms of location, while patch-
wise perturbation deliver maps where boundaries fit
the object boundaries.
In conclusion, perturbation-based methods have
several advantages over gradient-based methods,
making them a popular promising approach in XAI.
We remark also a lack of perturbation-based methods
concerning the explainability of object detectors (Pet-
siuk et al., 2021; Padmanabhan, 2022; Hogan et al.,
2022), while the main effort has been focused on the
explainability of classification decisions.
4 DRISE EXPLAINABILITY
METHOD
The Detector Randomized Input Sampling for Expla-
nation (DRISE) method (Petsiuk et al., 2021) is a
perturbation-based XAI method for object detectors.
The process for generating the attribution maps was
divided into five stages, namely, generating masks to
be then applied to the input image, running object de-
tector on masked images to get proposals, converting
object detections (target and proposals) into vectors,
computing similarities between target and proposals,
and inferring saliency map. In the following, we dis-
cuss details of each stage of the DRISE pipeline ap-
plied on Tenebrism paintings, as shown in Figure 2.
The process inputs are the input image I, the CNN
object detector model f and the target object detection
T specified by a bounding box (see green box in the
figure 2) with a class probability. In our case, Faster
RCNN is the detector network used to detect ’face’
class. The objective is to explain a face detection re-
sult by generating a saliency map S highlighting pix-
els of the input imageI considered important by the
model f to get such prediction output T, namely the
face’s bounding box (green bounding box in Figure
2) and probability.
4.1 Mask Generation
As the first step, authors adopt the RISE masking
technique (Petsiuk et al., 2018) to generate a set of
random binary masks. This consists of sampling
small binary masks and then upsampling them to
larger resolution using bilinear interpolation. The in-
put image I is element-wise multiplied with the ob-
tained N masks (M
1
.. M
N
) to get N masked images
(IM
1
.. IM
N
).
Towards Explainability in Using Deep Learning for Face Detection in Paintings
835

Figure 2: The pipeline of D-RISE method on Tenebrism painting.
4.2 Conversion of Detections
The detection result (target or proposal) is encoded
into a vector containing the corners coordinates of the
bounding box, the objectness score (0 if the bound-
ing box contains an object of any class, 1 otherwise)
and a one-hot vector for the probabilities (p
i
1
, ..., p
i
C
)
representing the probability that the bounding box be-
longs to each of the C classes. In our case, the faster
RCNN based object detector does not produce object-
ness score and we have one class ’face’. So the vector
consists of the bounding box corners and the proba-
bility to be a face.
4.3 Proposals Detection
This stage consists of running the object detector
model f on the N masked versions of the input image
to get the proposals (blue bounding boxes in Figure 2)
that will be converted into detection vectors.
4.4 Similarity Computing
For each masked image, a pairwise similarities are
computed between the target vector detection and all
detection proposal vectors. Then the maximum of
similarities is selected to be the weight of the mask
in question.
4.5 Saliency Map Generation
The saliency map is computed as a weighted sum of
the N masks. Note, that importance in S increases
from blue colors to red ones.
5 EXPERIMENTS
In this section, we give an overview of the evaluation
metrics, models, and used datasets, then we discusses
the results of DRISE method on face detection results
from painting images.
5.1 Experimental Settings
Dataset. We perform all our experiments on Tene-
brism Dataset (Gamra et al., 2021).
CNN Models. In this work, we are exclusively con-
sidering deep learning models used for face detection
in Tenebrism paintings called, Model1 and Model3
(Gamra et al., 2021). Specifically, the Model1 is a
Faster RCNN based ResNet50, pretrained on AFLW
Dataset (a famous dataset of photograph faces) and
tested on the Tenebrism dataset. Concerning the
Model3, it consists of transfer learning of Model1 by
retraining all its layers on the target dataset (i.e Tene-
brism dataset).
Attribution Method. We implemented the DRISE
method to inject transparency and explainability into
the desired CNN models. We follow the original
setup. So the number of iteration and the parameters
for mask generation are the same as in (Petsiuk et al.,
2021).
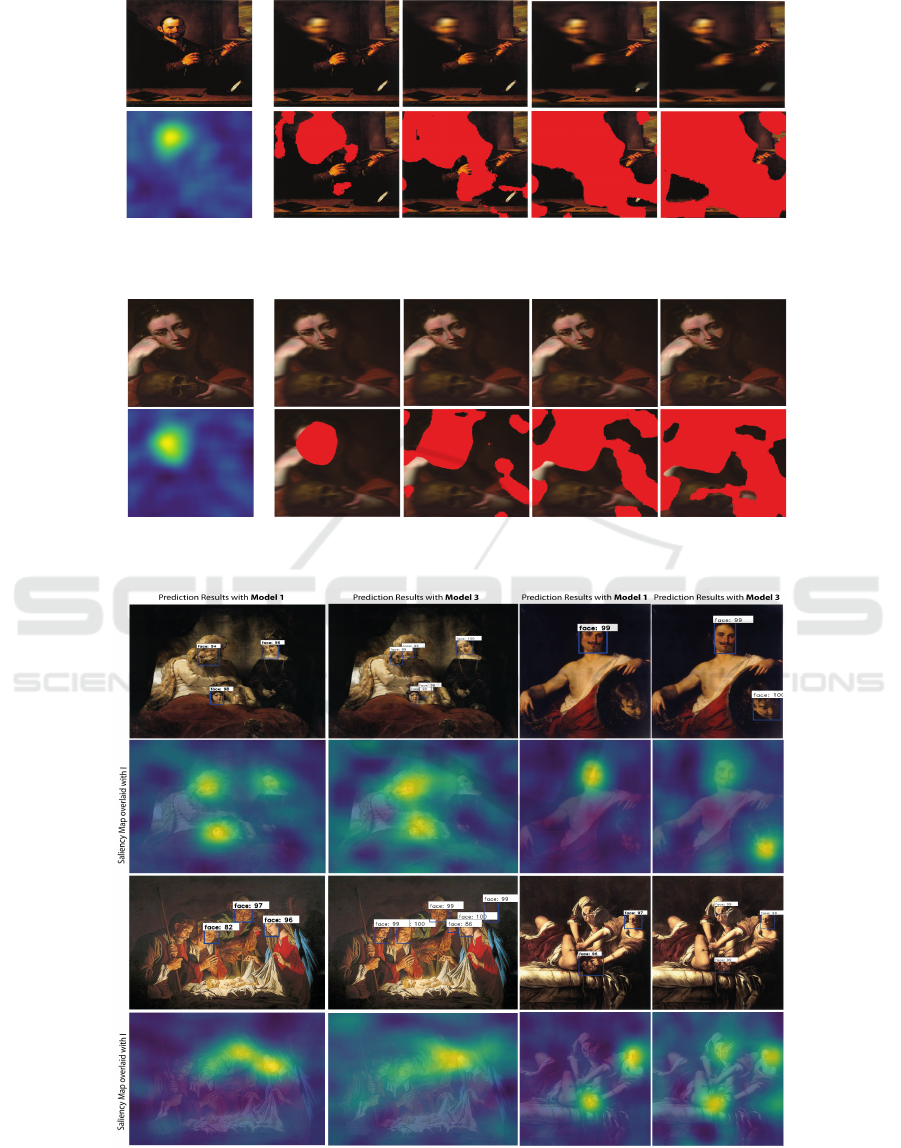
Evaluation Metrics. We used the deletion and in-
sertion metrics proposed by (Petsiuk et al., 2018) to
evaluate the explanation maps. The deletion metric
iteratively removes the N pixels most relevant to the
face class by masking them with blurred ones, as il-
lustrated in figure 3, measures its effect on the accu-
racy of face detection. On the other hand, the inser-
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
836
Original Image
Saliency Map
N most important Pixels for Deletion
Masking the N pixels of
original image with Blurred ones
N=20% of image pixels
N=40% of image pixels
N=60% of image pixels N=80% of image pixels
Figure 3: Deletion metric. Examples of N most important pixels (in red) according to the obtained saliency map iteratively
removed from the original image and replaced by blurred ones. N could be 30% of image pixels.
Insertion N pixels of original image
onto
Blurred Image
Original Image
Saliency Map
N most relevant pixels for Insertion
N=10% of image pixels N=30% of image pixels N=50% of image pixels N=70% of image pixels
Figure 4: Insertion Metric. Examples of N most relevant pixels (in red) according to the obtained saliency map. N could be
10% of most relevant image pixels, 20%, etc. The N pixels of the original image will be inserted in the blurred image.
Figure 5: DRISE visualization results for Tenebrism images using Model1 and Model3. The first and third rows are input
images with predictions results, others are the input images blended/mixed with their saliency maps.
Towards Explainability in Using Deep Learning for Face Detection in Paintings
837
tion metric iteratively substitutes the N pixels most
relevant with original pixels in a blurred version of
the original image (see Figure 4). We follow (Zhang
et al., 2021) to blur input images by using Gaussian
Blur with kernel size = 51 and sigma = 50. We com-
pute then the mean average precision (i.e. accuracy)
as the area under precision-recall curve (AUC) to be
used for face detection model evaluation.
5.2 Qualitative Results
Figure 5 shows examples comparing the DRISE ex-
planations for bounding boxes predicted by Model1
and Model3. The obtained saliency maps generally
seem to highlight the target face with its close sur-
roundings. But we remark that the background sur-
rounding faces in the saliency maps generated for
Model1 appears light blue compared to that of the
saliency maps generated for Model3. This can in-
dicates that the Model3 explores spatially the image
more broadly than the Model1, therefore we can de-
duce that Model3 has learned more about spatial fea-
tures from contextual information which could ex-
plain performances improvement.
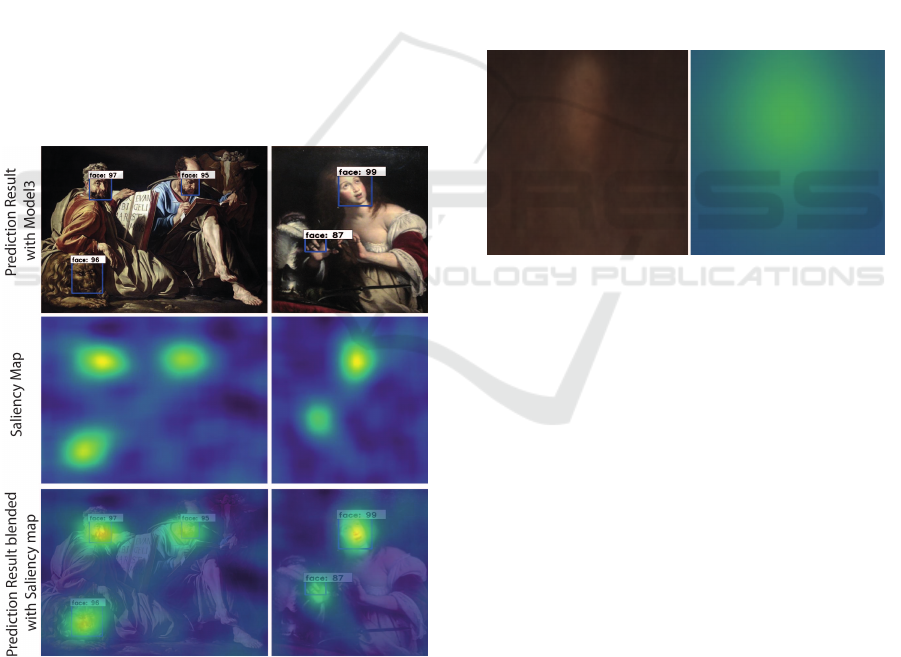
Figure 6: Example of saliency map explanations for false
positive detections. A possible interpretation is that impor-
tant pixels appeared similar to human faces, which could
explain the errors.
To understand the reasons of failure detection, we
perform model analysis using saliency maps of false
positive and false negative detections. Hence, this
could provide insights to make improvements to the
design architecture of the object detector (e.g. Faster
RCNN in our case). Figure 6 shows False positive
examples where the Model3 falsely detect faces. The
relevant pixels of the saliency map show that the input
image contains parts (hands, clothes, animal faces,
etc.) which could looks like a face. Hence, we
can conclude that the false positive errors start with
the feature backbone modeule, and may influence
down-stream modules in the face detector architecture
namely, region proposal network (RPN) and fast rcnn.
Figure 8 shows saliency maps for false negative ex-
amples (i.e. missed faces) that Model3 fails to detect
them. We remark that the relevant pixels highlighted
by the saliency map are considered to be discrimina-
tive features for face class, even though the Model3
did not detect them. So the failure is likely occurred
while processing these features in future stages in the
architecture (potential object region proposal, refining
object proposal or duplicate detections suppression).
Figure 7: Average face detections (left) and corresponding
average saliency maps for Model3 (right).
To provide a more holistic analysis of the com-
mon pattern in the model’s behaviour across many
images, we also compute average saliency map, as de-
scribed in (Petsiuk et al., 2021), by cropping all face
detections from saliency maps, then normalizing them
and compute their averages. The obtained results are
shown in Figure 7. We remark that this face class has
a saliency spread evenly across whole the object (the
absence of significant artifact).
5.3 Quantitative Results
We evaluate the performance of DRISE explanation
method on Model3 through deletion and insertion ex-
periments. In Figure 9-(a), we show the evolution
of the mean average precision w.r.t the percentage of
content inserted at each perturbation step. There is an
improvement in mean average precision as the 20% of
top salient pixels are added back in blurred image. As
the insertion of relevant pixels increases, the face de-
tection accuracy improves until reaching 87%. Figure
9-(b) shows the impact of removing relevant pixels on
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
838
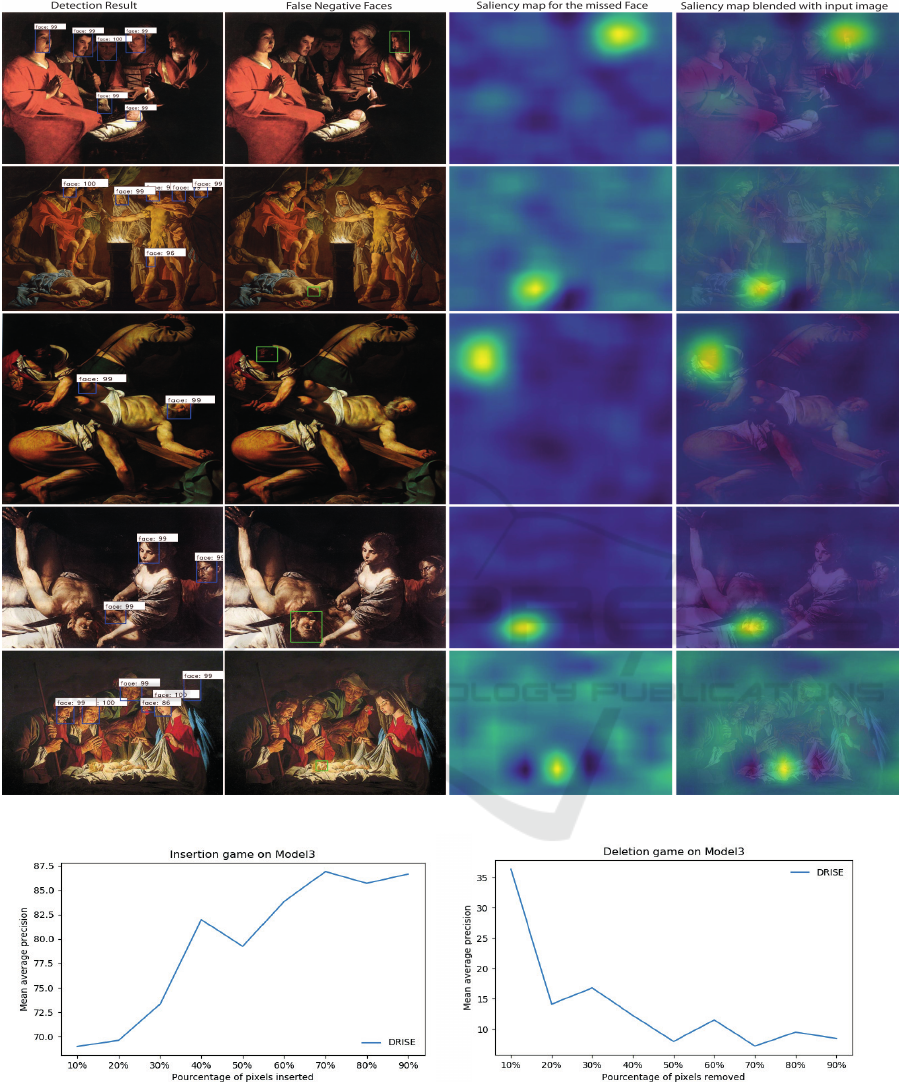
Figure 8: Explanations for missed detections.
(a) Insertion Test
(b) Deletion Test
Figure 9: Details of the Insertion & Deletion process.
Towards Explainability in Using Deep Learning for Face Detection in Paintings
839

the model accuracy. As can be seen, when 10% of top
most important pixels are removed, there is a sharp
drop in the mean average precision to reach around
37%. This continues to drop when we remove pixels
in decreasing order of salience (as expected).
6 CONCLUSIONS
In this work, we applied explainability method for ob-
ject detection analysis and comprehension. An im-
portant number of masks is generated to mask in-
put image. Afterwards, the model is running on the
obtained masked images to get proposals. Finally,
the saliency map is computed as a weighted sum of
the masks where weights are pairwise similarities be-
tween proposals and target detections. We have suc-
cessfully demonstrated the application of the DRISE
explainability method to our face detector models as
a preliminary exploration in Tenebrism painting im-
ages. We have also shown its abilities to locate rele-
vant features and discuss reasons for its failures. As
further improvement of this work, we should be look-
ing to improve the very processing time consuming of
the method.
REFERENCES
Ancona, M., Ceolini, E.,
¨
Oztireli, C., and Gross, M. (2019).
Gradient-based attribution methods. In Explainable
AI: Interpreting, Explaining and Visualizing Deep
Learning, pages 169–191. Springer.
Brunke, L., Agrawal, P., and George, N. (2020). Evaluating
input perturbation methods for interpreting cnns and
saliency map comparison. In ECCV Workshops.
Cetinic, E., Lipic, T., and Grgic, S. (2019). A deep learning
perspective on beauty, sentiment, and remembrance of
art. IEEE Access, 7:73694–73710.
Chattopadhay, A., Sarkar, A., Howlader, P., and Balasub-
ramanian, V. N. (2018). Grad-cam++: Generalized
gradient-based visual explanations for deep convolu-
tional networks. In 2018 IEEE winter conference on
applications of computer vision (WACV), pages 839–
847. IEEE.
Gamra, S. B., Mzoughi, O., Bigand, A., and Zagrouba, E.
(2021). New challenges of face detection in paintings
based on deep learning. In VISIGRAPP.
Hogan, M., Aouf, N., Spencer, P., and Almond, J. (2022).
Explainable object detection for uncrewed aerial ve-
hicles using kernelshap. In 2022 IEEE International
Conference on Autonomous Robot Systems and Com-
petitions (ICARSC), pages 136–141. IEEE.
Ivanovs, M., Kadikis, R., and Ozols, K. (2021).
Perturbation-based methods for explaining deep neu-
ral networks: A survey. Pattern Recognition Letters,
150:228–234.
Kim, V., Cho, H., and Chung, S. (2021). One-step pixel-
level perturbation-based saliency detector. In BMVC
virtual conference.
Mzoughi, O., Bigand, A., and Renaud, C. (2018). Face
detection in painting using deep convolutional neural
networks. In ACIVS.
Nielsen, I. E., Dera, D., Rasool, G., Ramachandran, R. P.,
and Bouaynaya, N. C. (2022). Robust explainability:
A tutorial on gradient-based attribution methods for
deep neural networks. IEEE Signal Processing Mag-
azine, 39(4):73–84.
Omeiza, D., Speakman, S., Cintas, C., and Weldermariam,
K. (2019). Smooth grad-cam++: An enhanced in-
ference level visualization technique for deep con-
volutional neural network models. arXiv preprint
arXiv:1908.01224.
Padmanabhan, D. C. (2022). Dext: Detector explana-
tion toolkit for explaining multiple detections using
saliency methods.
Petsiuk, V., Das, A., and Saenko, K. (2018). Rise: Ran-
domized input sampling for explanation of black-box
models. arXiv preprint arXiv:1806.07421.
Petsiuk, V., Jain, R., Manjunatha, V., Morariu, V. I., Mehra,
A., Ordonez, V., and Saenko, K. (2021). Black-box
explanation of object detectors via saliency maps. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 11443–
11452.
Pinciroli Vago, N. O., Milani, F., Fraternali, P., and
da Silva Torres, R. (2021). Comparing cam algo-
rithms for the identification of salient image features
in iconography artwork analysis. Journal of Imaging,
7(7):106.
Qiu, L., Yang, Y., Cao, C. C., Liu, J., Zheng, Y., Ngai, H.
H. T., Hsiao, J., and Chen, L. (2021). Resisting out-of-
distribution data problem in perturbation of xai. arXiv
preprint arXiv:2107.14000.
Ribeiro, M. T., Singh, S., and Guestrin, C. (2016). ” why
should i trust you?” explaining the predictions of any
classifier. In Proceedings of the 22nd ACM SIGKDD
international conference on knowledge discovery and
data mining, pages 1135–1144.
Selvaraju, R. R., Cogswell, M., Das, A., Vedantam, R.,
Parikh, D., and Batra, D. (2017). Grad-cam: Visual
explanations from deep networks via gradient-based
localization. In Proceedings of the IEEE international
conference on computer vision, pages 618–626.
Simonyan, K., Vedaldi, A., and Zisserman, A. (2014).
Deep inside convolutional networks: Visualising im-
age classification models and saliency maps. In In
Workshop at International Conference on Learning
Representations. Citeseer.
Smilkov, D., Thorat, N., Kim, B., Vi
´
egas, F., and Watten-
berg, M. (2017). Smoothgrad: removing noise by
adding noise. arXiv preprint arXiv:1706.03825.
Springenberg, J. T., Dosovitskiy, A., Brox, T., and Ried-
miller, M. (2014). Striving for simplicity: The all con-
volutional net. arXiv preprint arXiv:1412.6806.
Surapaneni, S., Syed, S., and Lee, L. Y. (2020). Exploring
themes and bias in art using machine learning image
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
840

analysis. In 2020 Systems and Information Engineer-
ing Design Symposium (SIEDS), pages 1–6. IEEE.
Thakur, S. and Fischmeister, S. (2021). A generaliz-
able saliency map-based interpretation of model out-
come. 2020 25th International Conference on Pattern
Recognition (ICPR), pages 4099–4106.
Tulio Ribeiro, M., Singh, S., and Guestrin, C. (2016). ” why
should i trust you?”: Explaining the predictions of any
classifier. arXiv e-prints, pages arXiv–1602.
Zeiler, M. D. and Fergus, R. (2014). Visualizing and under-
standing convolutional networks. In European confer-
ence on computer vision, pages 818–833. Springer.
Zhang, J., Lin, Z., Brandt, Jonathan, S. X., and Sclaroff,
S. (2016). Top-down neural attention by excitation
backprop. In European Conference on Computer Vi-
sion(ECCV).
Zhang, Q., Rao, L., and Yang, Y. (2021). A novel visual
interpretability for deep neural networks by optimiz-
ing activation maps with perturbation. In Proceedings
of the AAAI Conference on Artificial Intelligence, vol-
ume 35, pages 3377–3384.
Zhou, B., Khosla, A., Lapedriza, A., Oliva, A., and Tor-
ralba, A. (2016). Learning deep features for discrim-
inative localization. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2921–2929.
Towards Explainability in Using Deep Learning for Face Detection in Paintings
841
