
Subjective Baggage-Weight Estimation from Gait: Can You Estimate
How Heavy the Person Feels?
Masaya Mizuno
1
, Yasutomo Kawanishi
2,1
, Tomohiro Fujita
2
, Daisuke Deguchi
1
and Hiroshi Murase
1
1
Graduate School of Informatics, Nagoya University, Chikusa-ku, Nagoya, Japan
2
RIKEN Guardian Robot Project, Souraku-gun, Kyoto, Japan
Keywords:
Subjective Baggage-Weight, G2SW (Gait to Subjective Weight), Graph Convolution, Multi-Task Learning.
Abstract:
We propose a new computer vision problem of subjective baggage-weight estimation by defining the term sub-
jective weight as how heavy the person feels. We propose a method named G2SW (Gait to Subjective Weight),
which is based on the assumption that cues of the subjective weight appear in the human gait, described by
a 3D skeleton sequence. The method uses 3D locations and velocities of body joints as input and estimates
subjective weight using a Graph Convolutional Network. It also estimates human body weight as a sub-task
based on the assumption that the strength of a person depends on body weight. For the evaluation, we built a
dataset for subjective baggage-weight estimation, consisting of 3D skeleton sequences with subjective weight
annotations. We confirmed that the subjective weight could be estimated from a human gait and also confirmed
that the sub-task of body weight estimation pulls up the performance of the subjective weight estimation.
1 INTRODUCTION
Robots have been widely developed for various ap-
plications. Especially, in daily environments, vari-
ous kinds of human support robots have been pro-
posed (Yamamoto et al., 2019; Yuguchi et al., 2022).
Such a robot that works in our living space should
have a function of environmental recognition but also
provide proactive support. In this study, we focus on
such a support provided by a robot to a person carry-
ing heavy baggage.
Robots that can carry the baggage should be de-
veloped to support a person carrying heavy baggage.
Still, it is also important to develop a function that de-
termines whether to support a person. If the robot tries
to support a person who does not need the support, the
person may get irritated with the robot. In that case,
the person will not accept the robots. To avoid this sit-
uation, we focus on the functions that determine the
needs of the support and provide the support at an ap-
propriate time.
To make such decisions, the robots need to esti-
mate how heavy the person feels. In this study, we
define subjective weight as how heavy a person feels.
The greater the subjective weight, the more difficult a
person to think carrying baggage. To quantify the sub-
jective weight, we employ the New Borg Scale (Gun-
nar, 1982), which is a measure of subjective load dur-
ing exercise. By estimating the subjective weight, the
Skeleton Sequence
of Walking
Subjective Weight
Very
Heavy
RGB Sequence
of Walking
Figure 1: Estimation of the subjective baggage-weights
from human gait.
Subjective weight 5
(Physical weight 15kg)
Subjective weight 10
(Physical weight 15kg)
Figure 2: Example of the gait with the baggage of same
physical weight.
robot will decides whether the person needs support.
To make the problem setting clearer and simpler, we
assume a situation where one person is walking with
one piece of baggage as shown in Fig. 1.
Since the subjective weight is related to the actual
weight of baggage (which is called physical weight),
physical weight can be used as a clue for subjective
Mizuno, M., Kawanishi, Y., Fujita, T., Deguchi, D. and Murase, H.
Subjective Baggage-Weight Estimation from Gait: Can You Estimate How Heavy the Person Feels?.
DOI: 10.5220/0011668900003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
567-574
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
567

weight estimation. However, even if the baggage is
the same, the physical weight varies depending on
what is inside. Therefore, it is difficult to estimate the
physical weight from the appearance of the baggage
itself. Additionally, if the physical weight is even the
same, the subjective weight varies from person to per-
son. For example, a piece of baggage of the same
physical weight may be felt heavy by a physically
weak person like a child while it may be felt light by
a physically strong person like a muscular person.
When we humans see someone walking with bag-
gage, we can probably guess how heavy the person
feels to carry the baggage from the walking behav-
ior, that is, human gait. Hyung et al. (Hyung et al.,
2016) reported the relationship between the physi-
cal weight of baggage and human gait, in which the
pelvic tilt increases when the physical weight of bag-
gage increases. Additionally, the paper also shows
that the relationship between pelvic tilt and physical
weight varies from person to person, which depends
on his/her body weight. As shown in Fig. 2, even
when the physical baggage-weights are the same, the
human gait are different when the subjective weight is
different. In this study, we propose a method that esti-
mates the subjective weights by focusing on a human
gait.
A human gait can be found in temporal varia-
tions of human skeleton sequences (Kato et al., 2017).
The temporal variations of the human skeleton are
often represented by the skeleton sequence, which
has been used in gait recognition, action recogni-
tion, etc. (Teepe et al., 2021; Liu et al., 2016; Yan
et al., 2018; Liu et al., 2020; Nishida et al., 2020;
Temuroglu et al., 2020). These methods use graph
representations for human skeleton sequences to re-
alize the recognition tasks. In this study, we use 3D
human skeleton sequences during walking as a repre-
sentation of human gait.
Based on the above, we propose G2SW (Gait to
Subjective Weight) that is a method for estimating the
subjective weight from the human gait represented by
a skeleton sequence (Fig. 1). We modify a graph-
based action recognition method to estimate the sub-
jective weight estimation.
We focus on the fact that the gait is the repetition
of two steps (one walking cycle) and regard 3D body
joint locations in one walking cycle to represent the
gait. While graph-based action recognition methods
usually accept a fixed length input, we need to nor-
malize the length of walking cycles to a fixed length,
by resampling frames in a walking cycle. However,
this result in the loss of information on gait speed,
since all gait cycles have the same length. For this
problem, we introduce velocities as additional feature
for each body joints. This locations-and-velocities
representation retains velocity information but has a
fixed length.
As noted above, the subjective baggage-weight is
affected by body weight of the person. To take this
into account in the estimation, the proposed method
simultaneously estimates the body-weight of the per-
son as a sub-task in the training phase. By using
the sub-task, the network is trained to consider body
weight in the subjective baggage-weight estimation.
The main contributions of this work are summa-
rized as follows:
• We propose a new computer vision problem
of subjective baggage-weight estimation of a
piece of baggage, by defining subjective baggage-
weight as how heavy a person feels, quantified by
the New Borg Scale (Gunnar, 1982).
• We propose G2SW, an estimation method of sub-
jective baggage-weight from the human gait. The
method uses velocity information as additional
feature, and body-weight estimation is added as
a sub-task to focus on the difference of persons.
• We built a novel dataset of human skeleton se-
quences with subjective baggage-weight annota-
tions.
The following section 2 presents the related work
in this literature. Section 3 presents the proposed
method that estimates the subjective weights. Then,
section 4 presents the experimental evaluation. Fi-
nally, section 5 summarizes and discusses future is-
sues.
2 RELATED WORK
2.1 Baggage Weight Estimation
Yamaguchi et al. (Yamaguchi et al., 2020) have pro-
posed a method to estimate baggage weight from
body sway. Body sway is the slight swaying of a per-
son’s body even when standing upright and stationary.
The method estimates the baggage weight by focus-
ing on the characteristic that the heavier the weight,
the greater the body sway. Because this method re-
quires observing a stationary standing person from a
bird’s-eye view, the method is not directly applicable
to a robotic application.
Oji et al. (Oji et al., 2018) have proposed a weight
estimation method from lifting motion. The method
estimates the weight of an object from a hand motion
by focusing on the fact that the hand motion changes
depending on the weight of the object when lifting an
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
568
object. However, it requires object lifting motion, its
applicable situation is limited.
2.2 Action Recognition by a Body
Skeleton Sequence
Long Short-Term Memory(LSTM), which can cap-
ture temporal information, is often used in action
recognition from a skeleton sequence (Liu et al.,
2016; Liu et al., 2017; Ullah et al., 2018; Majd and
Safabakhsh, 2020).
In recent years, the Graph Convolutional Network
(GCN), which consists of the graph convolution lay-
ers, has become the mainstream of action recognition.
It regards a skeleton as a graph. Generally, each body
joint and each limb are represented as a vertex and
an edge in a graph, respectively. ST-GCN (Yan et al.,
2018) is a method of action recognition from a skele-
ton sequence that considers the skeleton sequence
as a temporally-connected graph. This method ex-
tracts spatial features by applying graph convolution
for each frame, followed by temporal convolution for
each temporal sequence of a body joint to extract tem-
poral features. By the structure, the method can con-
sider the skeleton structure and motion in the action
recognition task.
There are several methods that extend the ST-
GCN. One of the extensions is the multi-scale di-
rection, represented by MS-G3D (Liu et al., 2020).
The main component of the method is the G3D mod-
ule, which is a graph convolution version of the I3D
module (Carreira and Zisserman, 2017). The module
consists of graph convolutions over a spatio-temporal
graph corresponding to a skeleton sequence. The
method further extends the module to multi-scale us-
ing multiple graphs of different multi-hop connec-
tions. The multi-hop connections of the graphs al-
low us to directly connect body joints that are skele-
tally distant from each other but are important for the
recognition task.
3 PROPOSED METHOD
3.1 Overview
This paper proposes a method for estimating the sub-
jective baggage-weight from a human gait, named
G2SW (Gait to Subjective Weight). In this study, we
use a 3D human skeleton sequence as a representa-
tion of human gait. A 3D human skeleton sequence is
a set of (X, Y, Z) coordinates of joint locations in the
world coordinate system. Here, (X
j
t
, Y
j
t
, Z
j
t
)
⊤
denotes
Subjective baggage-weight estimator training
Subjective baggage-weight
estimation
Training
Estimation
A location and
velocity graph
Subjective weight
Subjective weight
Pre-processing
A 3D human
skeleton
sequence of one
walking cycle
+ Body weight
A location and
velocity graph
Pre-processing
A 3D human
skeleton
sequence of one
walking cycle
Figure 3: The training and estimation processes of the pro-
posed method.
the location of the j-th body joint in t-th frame. Ad-
ditionally, noting that walking is a repetition of two
steps, we define two steps as one cycle of walking
and use the 3D human skeleton sequence S
i
for one
cycle of walking as input.
In this section, we describe the detail of G2SW,
a regression-based method for estimating the subjec-
tive weight based on the human gait represented by
a 3D human skeleton sequence of one cycle of walk-
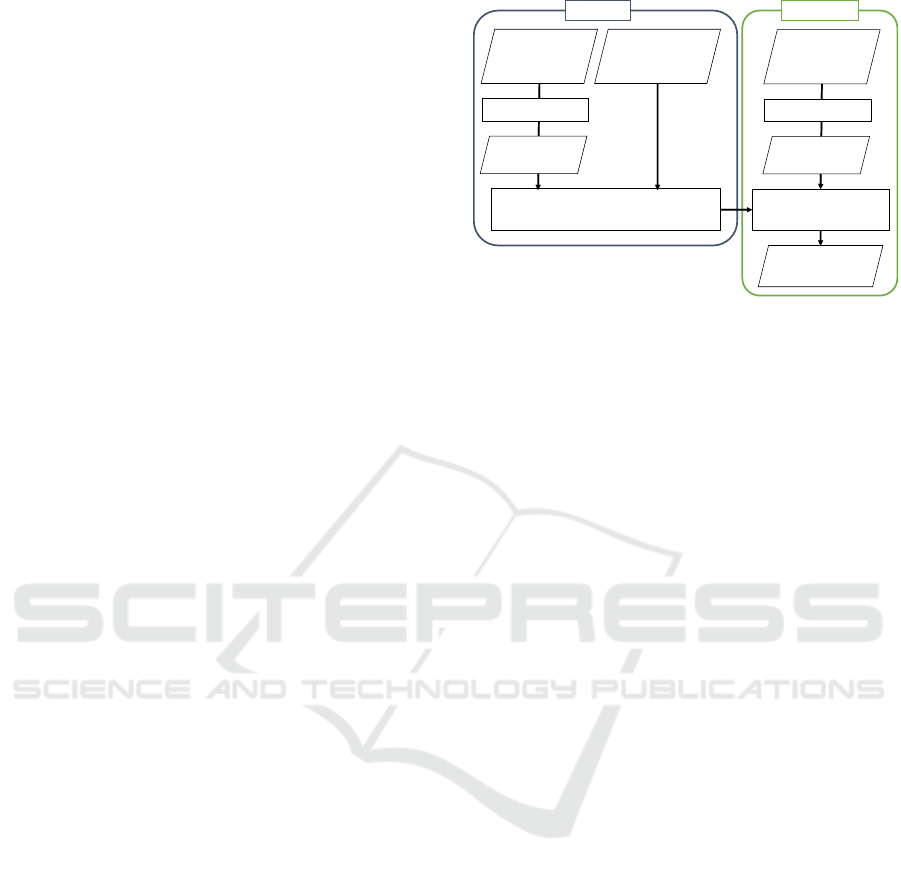
ing. Figure 3 shows the flowchart of the training and
estimation steps of the proposed method. As a pre-
processing, the i-th 3D human skeleton sequence S
i
is
converted into a location and velocity graph
b
S
i
. Then
the location and velocity graph is input to the sub-
jective weight estimator (G2SW) to estimate the sub-
jective weight. For training the G2SW, we employ
multi-task learning where body weight estimation is a
sub-task.
In the following, first, we define the subjective
weight in section 3.2. Then, the pre-processing for
the input is explained in section 3.3. The network ar-
chitecture and its multi-task learning are explained in
section 3.4.
3.2 Definition
In this study, we define subjective weight as how
heavy a person feels. We employ the New Borg
Scale (Gunnar, 1982) to quantify the subjective
weight. Originally, the New Borg Scale quantifies
how hard the activity is as shown in Table 5. We use
the scale to quantify how heavy a person feels, and
the proposed method G2SW estimates the value of
the New Borg Scale. In the new Borg Scale, there are
scale values that do not have subjective descriptions.
In the subjective weight assessment, it is possible to
choose these values if participant feels that subjective
weight exists between these subjective descriptions.
Subjective Baggage-Weight Estimation from Gait: Can You Estimate How Heavy the Person Feels?
569
Very
Heavy
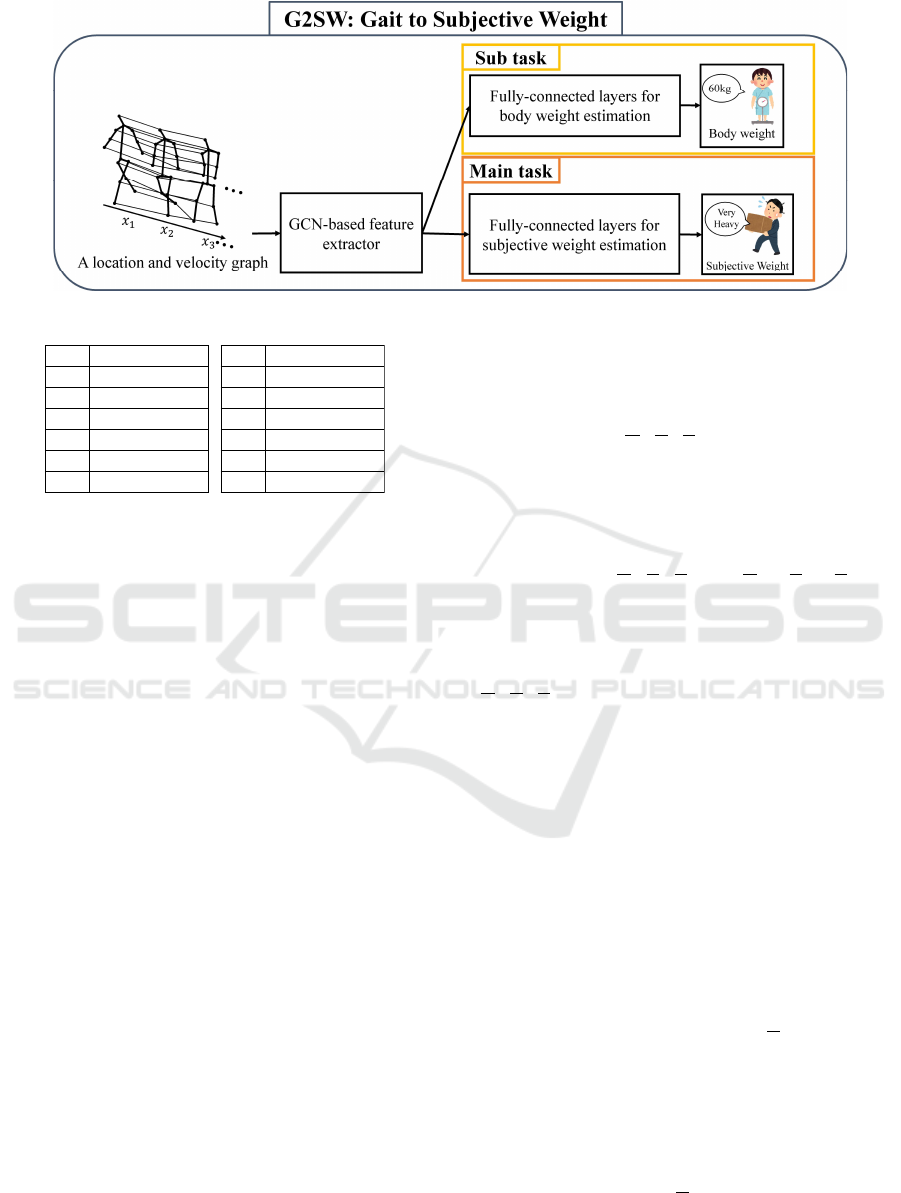
GCN-based feature
extractor
Fully-connected layers for
subjective weight estimation
G2SW: Gait to Subjective Weight
60kg
Fully-connected layers for
body weight estimation
Main task
Sub task
A location and velocity graph
Body weight
Subjective Weight
Figure 4: The network architecture of the proposed G2SW.
Scale Description
10 Very, very Hard
9
8
7 Very Hard
6
5 Hard
Scale Description
4 Somewhat Hard
3 Moderate
2 Light
1 Very Light
0.5 Ver, very Light
0 Nothing at all
Figure 5: New Borg Scale.
3.3 Pre-Processing
In the proposed method, a 3D human skeleton se-
quence of one walking cycle is assumed to be cropped
beforehand based on the frame where the positions of
the left and right legs are most distant.
Since the 3D human skeleton sequence of one
walking cycle captured by a sensor is described in the
world coordinate, it varies according to the location
and orientation of the person. The recognition should
be robust to the location and orientation. Also, the
lengths of walking cycles are different. For accurate
recognition, these variations should be normalized.
When simply sampling frames of a fixed length
from a walking cycle, walking speed information will
be ignored. Therefore, we enhance the input skeleton
sequences by adding the velocity information of each
body joint.
Therefore, the pre-processing consists of i) loca-
tion and orientation normalization, ii) velocity calcu-
lation, and iii) frame sampling for the fixed length.
After the pre-processing, an input 3D skeleton se-
quence will be normalized and enhanced. We named
the output of the pre-processing as location and ve-
locity graph.
I) Location and Orientation Normalization.
First, the location of the skeletons of each frame is
normalized by aligning the input skeletons so that
the position of the pelvis in each frame becomes the
origin (0, 0, 0)
⊤
. Also, the orientation is normalized
by rotating so that the locations of both hips are on
the X-Z plane where the horizontal plane is X-Y. By
this process, the locations of the j-th body joint in
t-th frame will be (X
j
t
, Y
j
t
, Z
j
t
)
⊤
.
II) Velocity Calculation. The velocity here is de-
fined as the difference between the locations of each
body joint in adjacent frames.
(
˙
X
j
t
,
˙
Y
j
t
,
˙
Z
j
t
)
⊤
= (X
j
t
, Y
j
t
, Z
j
t
)
⊤
− (X
j
t−1
, Y
j
t−1
, Z
j
t−1
)
⊤
(1)
The calculated velocity of each body joint is appended
to the corresponding body joint so that the j-th body
joint in the t-th frame has a 6-dimensional feature
(X
j
t
, Y
j
t
, Z
j
t
,
˙
X
j
t
,
˙
Y
j
t
,
˙
Z
j
t
)
⊤
.
III) Frame Sampling for the Fixed Length. Since
the length of one walking cycle is different among
3D human skeleton sequences, the length should be
fixed to input them into a graph convolutional net-
work. M frames are sampled from the original se-
quence at approximately equivalent intervals by inter-
polating from adjacent frames.
3.4 The Proposed G2SW and Its
Multi-Task Training
In the proposed G2SW, subjective weight is estimated
from the location and velocity graph S
i
, which is pre-
processed output of the i-th 3D skeleton sequence of
one walking cycle S
i
.
The architecture of the proposed G2SW is shown
in Fig. 4. In the proposed G2SW, a feature representa-
tion is calculated using a GCN-based feature extractor
f as
p
i
= f (S
i
;θ
f
, A), (2)
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
570

where A denotes an adjacent matrix that defines the
adjacency of human body joints. This function f con-
sists of multiple graph convolution layers. In this
study, as the feature extraction function f , the two
consecutive blocks of the MS-G3D module (Liu et al.,
2020) are used. Here, parameters in the network are
represented by θ
f
. After the MS-G3D blocks, the
graph-shaped output is reshaped to a 1-dimensional
vector p
i
.
Then, subjective weight is calculated using fully-
connected layers g. At that time, body weight is also
calculated using fully-connected layers h, simultane-
ously.
w
s
i
= g(p
i
;θ
g
), (3)
w
b
i
= h(p
i
;θ
h
). (4)
These two functions g and h consist of four fully-
connected layers whose parameters are θ
g
and θ
h
, re-
spectively. Leaky ReLU (Maas et al., 2013) is used as
the activation function for the hidden layers.
Given a batch of S
i
and corresponding ground
truth of subjective weight and body weight (
b
w
s
i
,
b
w
b
i
),
the network is trained in multi-task learning manner.
The parameters θ
f
, θ
g
, and θ
h
are updated using back-
propagation to minimize the mean squared error of
the loss L consists of subjective weight loss L
s
and
body weight loss L
b
.
L = λ
s
L
s
+ λ
b
L
b
, (5)
L
s
=
∑
i
(w
s
i
−
b
w
s
i
)
2
, (6)
L
b
=
∑
i
(w
b
i
−
b
w
b
i
)
2
, (7)
where λ
s
and λ
b
are the weight of the loss. Here, the
ranges of subjective weight and body weight are nor-
malized to be a similar scale.
4 EVALUATION
4.1 Dataset
Because there are no publicly available datasets that
consist of 3D skeleton sequences with annotations of
the subjective baggage weights, we originally cap-
tured a dataset for the evaluation. This section de-
scribes the details of our dataset.
In this study, we assume a situation where one per-
son is walking with a piece of baggage. The 3D hu-
man skeleton sequences were collected by observing
each participant walking with a piece of baggage us-
ing a Microsoft Azure Kinect sensor installed from
a height of 2 m. The frame rate was 30 fps. Fig. 6
shows captured images and the 3D human skeleton
sequences of each type of baggage.
Since subjective weight may be affected by body
size and gender, the set of participants should not have
biases in body size and gender. We employed 30 par-
ticipants (15 males and 15 females) of diverse heights
and weights for the dataset. Figure 7 shows the distri-
bution of the participants’ heights and weights.
We prepared five types of baggage, consisting of a
handbag, shoulder bag, backpack, cardboard box, and
shopping basket , and we prepared six variations of
the contents weight of the baggage consisting of 0 kg,
5 kg, 7.5 kg, 10 kg, 12.5 kg, and 15 kg. The subjective
weights were annotated by a questionnaire survey to
the participants themselves. In the questionnaire, par-
ticipants scored how hard they felt after walking with
each baggage according to the New Borg Scale (Gun-
nar, 1982) (Table 5). To prevent the participants from
knowing the actual value of the physical weight, the
contents of the baggage were hidden from them.
In a session, a participant walked with a piece of
prepared baggage, and a short break was inserted after
each session to avoid the effect of the previous ses-
sion. In this experiment, 30 patterns (five baggage
types × six weights) of 3D human skeleton sequences
were captured for each subject.
All the participants consented to the use and dis-
closure of their captured data for research purposes. It
should be noted that the Ethics Committee at Nagoya
University has approved this experiment.
4.2 Evaluation Protocol and Metrics
In this experiment, we performed 5-fold cross-
validation that splits 5 people for evaluation and the
rest of 30 people for training from the dataset.
Because the total number of pre-processed 3D
human skeleton sequences in the dataset was only
24,015 walking cycles, data augmentation was ap-
plied. From an input 3D skeleton sequence of one
walking cycle, three frames are randomly dropped.
We performed this ten times for each walking cycle,
thus increasing the data volume to 240,150 walking
cycles. In the experiment, the frame length of a loca-
tion and velocity graph is set to M = 50 after this data
augmentation.
We evaluated the G2SW performance for the sub-
jective weight estimation for each type of baggage.
As an evaluation metric, we employ the mean abso-
lute error (MAE) of the estimation results.
MAE =
1
N
N
∑
i=1
|w
s
i
−
b
w
s
i
|, (8)
where N represents the number of the 3D skeleton se-
quences.
Subjective Baggage-Weight Estimation from Gait: Can You Estimate How Heavy the Person Feels?
571
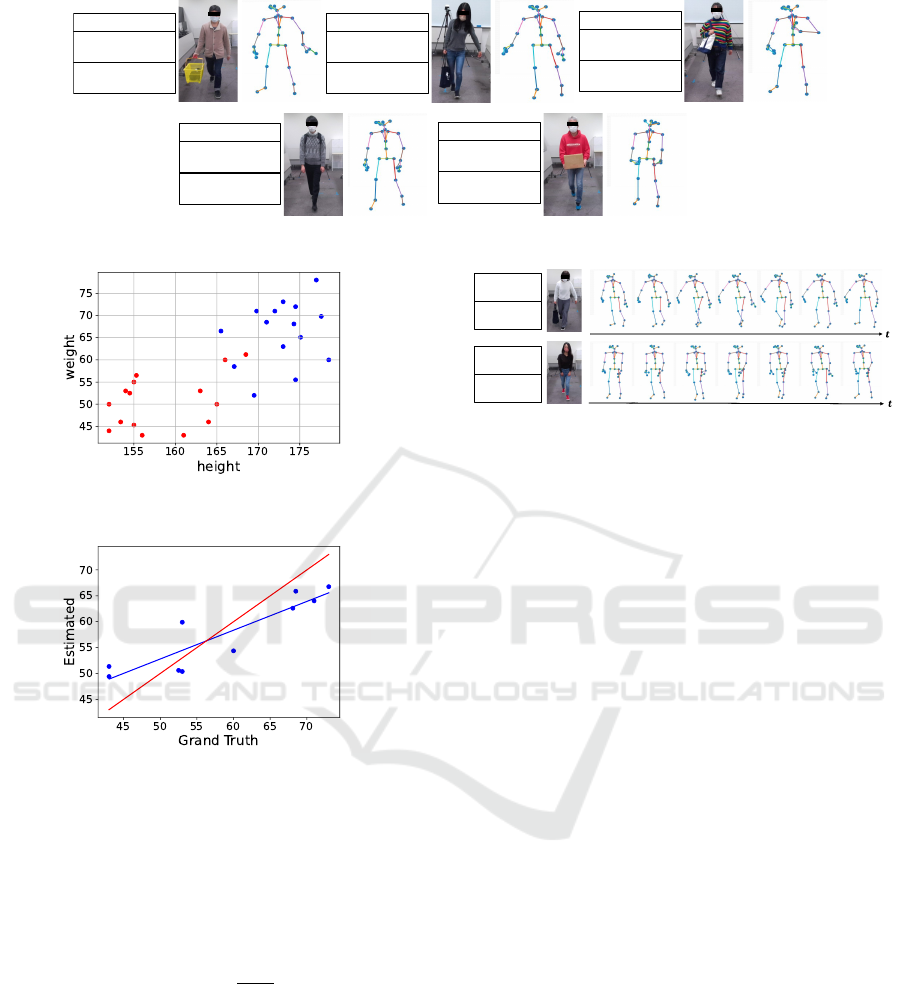
Shopping basket
Physical weight
0kg
Subjective weight
0
Handbag
Physical weight
15kg
Subjective weight
0
Shoulder Bag
Physical weight
7.5kg
Subjective weight
2
Backpack
Physical weight
10kg
Subjective weight
3
Cardboard Box
Physical weight
12.5kg
Subjective weight
3
Figure 6: Examples of captured images and 3D human skeletons of each type of baggage.
Figure 7: The distribution of the participants’ heights (cm)
and weights (kg) (blue:male, red:female).
Figure 8: A plot of body weight Estimation (blue points:
estimation plot of each person, blue line: linear fitting result
of estimation plot, red line: grand truth (the unit of body
weight is kg)).
In terms of the application for deciding whether
to support a person, we also evaluated the perfor-
mance of estimation within a tolerance error thresh-
old, named Tolerance Accuracy (TA).
TA
τ
= 100
NW
τ
N
, (9)
where τ is the tolerance error threshold, and NW
τ
rep-
resents the number of data within the estimation error
τ.
4.3 Preliminary Experiment: Body
Weight Estimation
In this study, body weight estimation was performed
as a sub-task of G2SW. However, if the accuracy of
weight estimation from skeleton features is low, it is
Grand Truth
7.0
Estimated
6.98
Grand Truth
10
Estimated
4.95
Figure 9: Example of estimation results (skeleton sequence
represents gait).
inappropriate to use body weight estimation as a sub-
task. Therefore, we confirmed whether it is possible
to estimate the body weight from skeleton features.
Figure 8 shows the plots of the mean of each person’s
weight estimate in the test data and the linear fitting
result. From this, it can be seen that the weight es-
timates are correlated with the true values. From the
above finding, we can say that the estimation of the
body weight can be estimated from a 3D skeleton se-
quence of one walking cycle.
4.4 Main Experiment: Subjective
Baggage-Weight Estimation
Table 1 shows the mean absolute errors of the sub-
jective weight estimation and Tolerance Accuracy of
τ = 1, 2, and 3. Figure 9 shows an example of the
estimation results. From Table 1, we confirmed that
G2SW could estimate subjective weights with the
mean absolute error of 1.33 in New Borg Scale as the
average of the entire baggage. And, G2SW could esti-
mate 50.6% in Tolerance Accuracy with τ = 1(TA
1
),
74.7% in Tolerance Accuracy with τ = 2(TA
2
), and
88.4% in Tolerance Accuracy with τ = 3(TA
3
) as the
average of the entire baggage.
4.5 Discussion
Through the experiments, we confirmed that G2SW
can estimate subjective weight.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
572
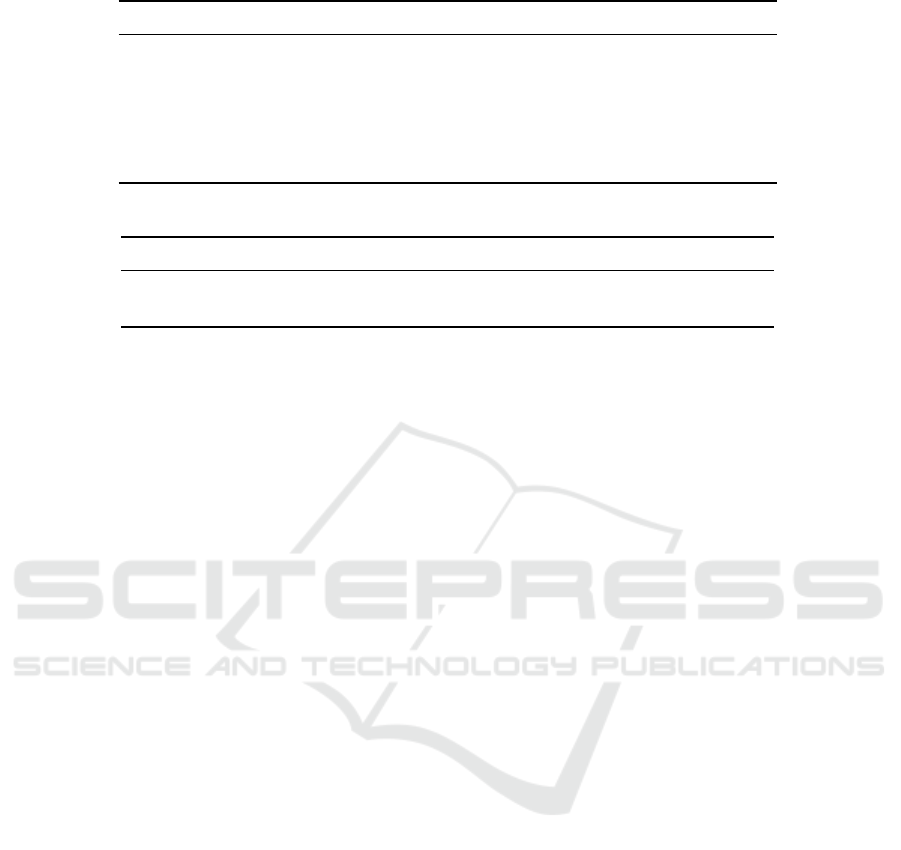
Table 1: G2SW’s Evaluations for subjective baggage-weight (subjective weight: 0–10).
Type of Baggage MSE↓ TA
1
↑ TA
2
↑ TA
3
↑
Handbag 1.42 46.6% 71.1% 87.0%
Shoulder bag 1.09 57.8% 81.6% 93.6%
Backpack 1.38 49.5% 73.8% 87.1%
Cardboard box 1.44 47.0% 72.5% 86.7%
Shopping basket 1.32 52.2% 74.8% 88.0%
Average 1.33 50.6% 74.7% 88.4%
Table 2: Comparison of subjective weight estimation accuracy with and without velocity information.
MSE↓ TA
1
↑ TA
2
↑ TA
3
↑
with velocity 1.23 50.6% 74.7% 88.4%
without velocity 1.42 47.8% 72.2% 86.6%
4.5.1 Difference Among Baggage Types
Table 1 confirmed that the subjective weight estima-
tion for carrying a shoulder bag is more accurate than
that for carrying other baggage. This is because the
degree of postural change caused by subjective weight
tends to be larger when carrying a shoulder bag than
other baggages.
A possible cause of greater postural change due to
subjective weight is gait stability. The more unstable
the gait, the more likely the posture changes by exter-
nal factors such as the weight of baggage. A hand-
bag, shoulder bag, and shopping basket are held with
only one shoulder or one hand, making gait unstable,
while backpacks and cardboard boxes are held with
both shoulders or hands, making walking more stable
relatively.
Another cause of greater postural change due to
subjective weight is the distance between the baggage
and the human center of gravity. When the distance
is large, the human needs to change his posture more
significantly to maintain balance than when the dis-
tance is shorter. Among the baggage which cause un-
stable gait, the shoulder bag has the furthest distance
to the human center of gravity. Therefore, the human
needs to change his posture larger when carrying a
shoulder bag than the rest baggage.
4.5.2 Effectiveness of the Velocity Feature
In the method, we propose the location and velocity
graph to preserve velocity information in the fixed se-
quence length of one cycle walking. To confirm the
effectiveness of the additional velocity features as in-
put, we compared our method with a method that did
not uses velocity information. Table 2 shows a com-
parison of subjective weight estimation accuracy with
and without velocity information. From the table, it
was confirmed that the accuracy of subjective weight
estimation was improved by using the velocity infor-
mation as additional information.
4.5.3 Challenges of the Practical Use
In the proposed method G2SW, the estimation is per-
formed on the sequence for one cycle of walking
cropped from the sequence during walking; however,
in reality, several walking cycles are obtained from
a captured sequence of walking. Therefore, multiple
estimation results are obtained for a single sequence
during walking. In the future, it will be necessary to
consider how to integrate the multiple estimation re-
sults obtained.
5 CONCLUSION
In this study, we proposed a new computer vision
problem of the subjective baggage-weight estimation
when a person is walking with a piece of baggage and
established G2SW which is an estimation method for
subjective weights. To quantify the subjective weight,
we defined it using the New Borg Scale. Since subjec-
tive weights affect the human gait, we proposed a sub-
jective weight estimation method from a human gait,
represented by a 3D human skeleton sequence. The
method uses locations and velocities of body joints as
input and estimates human body weight as a sub-task
based on the assumption strength of a person depends
on body weight.
Future work includes a further update of the
gait representation describing the motion of skeletons
more effectively.
Subjective Baggage-Weight Estimation from Gait: Can You Estimate How Heavy the Person Feels?
573

ACKNOWLEDGEMENTS
This work was supported in part by the JSPS Grant-
in-Aid for Scientific Research (17H00745).
REFERENCES
Carreira, J. and Zisserman, A. (2017). Quo Vadis, action
recognition? a new model and the kinetics dataset. In
Proceedings of the 2017 IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 4724–
4733, Honolulu, HI. IEEE.
Gunnar, B. (1982). Psychophysical bases of perceived ex-
ertion. Medicine & Science in Sports & Exercise,
14(5):377–381.
Hyung, E.-J., Lee, H.-O., and Kwon, Y.-J. (2016). Influ-
ence of load and carrying method on gait, specifically
pelvic movement. Journal of Physical Therapy Sci-
ence, 28(7):2059–2062.
Kato, H., Hirayama, T., Kawanishi, Y., Doman, K., Ide, I.,
Deguchi, D., and Murase, H. (2017). Toward describ-
ing human gaits by onomatopoeias. In Proceedings of
the 16th IEEE International Conference on Computer
Vision Workshops, pages 1573–1580. IEEE.
Liu, J., Shahroudy, A., Xu, D., and Wang, G. (2016).
Spatio-temporal LSTM with trust gates for 3D human
action recognition. In Leibe, B., Matas, J., Sebe, N.,
and Welling, M., editors, Computer Vision – ECCV
2016, volume 9907, pages 816–833. Springer Interna-
tional Publishing.
Liu, J., Wang, G., Hu, P., Duan, L.-Y., and Kot, A. C.
(2017). Global context-aware attention LSTM net-
works for 3D action recognition. In Proceedings of
the 2017 IEEE Conference on Computer Vision and
Pattern Recognition, pages 3671–3680, Honolulu, HI.
IEEE.
Liu, Z., Zhang, H., Chen, Z., Wang, Z., and Ouyang, W.
(2020). Disentangling and unifying graph convolu-
tions for skeleton-based action recognition. In Pro-
ceedings of the 2020 IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 140–149,
Seattle, WA, USA. IEEE.
Maas, A. L., Hannun, A. Y., and Ng, A. Y. (2013). Rectifier
nonlinearities improve neural network acoustic mod-
els. In Proceedings of the 30th International Confer-
ence on Machine Learning Workshop, pages 1–6.
Majd, M. and Safabakhsh, R. (2020). Correlational convo-
lutional LSTM for human action recognition. Neuro-
computing, 396:224–229.
Nishida, N., Kawanishi, Y., Deguchi, D., Ide, I., Murase,
H., and Piao, J. (2020). SOANets: Encoder-Decoder
based skeleton orientation alignment network for
white cane user recognition from 2D human skeleton
sequence. In Proceedings of the 15th International
Joint Conference on Computer Vision, Imaging and
Computer Graphics Theory and Applications, pages
435–443, Valletta, Malta. SCITEPRESS - Science and
Technology Publications.
Oji, T., Makino, Y., and Shinoda, H. (2018). Weight esti-
mation of lifted object from body motions using neu-
ral network. In Prattichizzo, D., Shinoda, H., Tan,
H. Z., Ruffaldi, E., and Frisoli, A., editors, Proceed-
ings of the Haptics: Science, Technology, and Appli-
cations, volume 10894, pages 3–13. Springer Interna-
tional Publishing, Cham.
Teepe, T., Khan, A., Gilg, J., Herzog, F., H
¨
ormann, S., and
Rigoll, G. (2021). GaitGraph: Graph convolutional
network for skeleton-based gait recognition. In Pro-
ceedings of the 2021 IEEE International Conference
on Image Processing, pages 2314–2318.
Temuroglu, O., Kawanishi, Y., Deguchi, D., Hirayama, T.,
Ide, I., Murase, H., Iwasaki, M., and Tsukada, A.
(2020). Occlusion-aware skeleton trajectory represen-
tation for abnormal behavior detection. In Ohyama,
W. and Jung, S. K., editors, Proceedings of the
2020 International Workshop on Frontiers of Com-
puter Vision, volume 1212, pages 108–121, Singa-
pore. Springer Singapore.
Ullah, A., Ahmad, J., Muhammad, K., Sajjad, M., and Baik,
S. W. (2018). Action recognition in video sequences
using deep bi-directional LSTM with CNN features.
IEEE Access, 6:1155–1166.
Yamaguchi, Y., Kamitani, T., Nishiyama, M., Iwai, Y., and
Kushida, D. (2020). Extracting features of body sway
for baggage weight classification. In Proceedings of
the 9th IEEE Global Conference on Consumer Elec-
tronics, pages 345–348. IEEE.
Yamamoto, T., Terada, K., Ochiai, A., Saito, F., Asahara,
Y., and Murase, K. (2019). Development of human
support robot as the research platform of a domestic
mobile manipulator. ROBOMECH Journal, 6(1):1–
15.
Yan, S., Xiong, Y., and Lin, D. (2018). Spatial temporal
graph convolutional networks for skeleton-based ac-
tion recognition. In Proceedings of the 32nd AAAI
Conference on Artificial Intelligence, pages 7444–
7452.
Yuguchi, A., Kawano, S., Yoshino, K., Ishi, C. T., Kawan-
ishi, Y., Nakamura, Y., Minato, T., Saito, Y., and Mi-
noh, M. (2022). Butsukusa: A conversational mo-
bile robot describing its own observations and internal
states. In Proceedings of the 2022 17th ACM/IEEE In-
ternational Conference on Human-Robot Interaction,
pages 1114–1118, Sapporo, Japan. IEEE.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
574
