
UMVpose++: Unsupervised Multi-View Multi-Person 3D Pose
Estimation Using Ground Point Matching
Di
´
ogenes Wallis de Franc¸a Silva
1
, Jo
˜
ao Paulo Silva do Monte Lima
1,2 a
,
Diego Gabriel Francis Thomas
3 b
, Hideaki Uchiyama
4 c
and Veronica Teichrieb
1 d
1
Voxar Labs, Centro de Inform
´
atica, Universidade Federal de Pernambuco, Recife, PE, Brazil
2
Visual Computing Lab, Departamento de Computac¸
˜
ao, Universidade Federal Rural de Pernambuco, Recife, PE, Brazil
3
Faculty of Information Science and Electrical Engineering, Kyushu University, Japan
4
Graduate School of Science and Technology, Nara Institute of Science and Technology, Nara, Japan
Keywords:
3D Human Pose Estimation, Unsupervised Learning, Deep Learning, Reprojection Error.
Abstract:
We present UMVpose++ to address the problem of 3D pose estimation of multiple persons in a multi-view
scenario. Different from the most recent state-of-the-art methods, which are based on supervised techniques,
our work does not need labeled data to perform 3D pose estimation. Furthermore, generating 3D annotations is
costly and has a high probability of containing errors. Our approach uses a plane sweep method to generate the
3D pose estimation. We define one view as the target and the remainder as reference views. We estimate the
depth of each 2D skeleton in the target view to obtain our 3D poses. Instead of comparing them with ground
truth poses, we project the estimated 3D poses onto the reference views, and we compare the 2D projections
with the 2D poses obtained using an off-the-shelf method. 2D poses of the same pedestrian obtained from the
target and reference views must be matched to allow comparison. By performing a matching process based
on ground points, we identify the corresponding 2D poses and compare them with our respective projections.
Furthermore, we propose a new reprojection loss based on the smooth L
1
norm. We evaluated our proposed
method on the publicly available Campus dataset. As a result, we obtained better accuracy than state-of-the-art
unsupervised methods, achieving 0.5% points above the best geometric method. Furthermore, we outperform
some state-of-the-art supervised methods, and our results are comparable with the best-supervised method,
achieving only 0.2% points below.
1 INTRODUCTION
3D human pose estimation is an active research area
in computer vision. Over the last decade, several
methods have been proposed for human 3D pose es-
timation from single or multiple views, with com-
pelling results. 3D poses are beneficial and can
be used in several applications: augmented reality,
surveillance systems, and intelligent sports. When we
talk about 3D pose estimation, we can consider sev-
eral kinds of scenarios: one-view one-person, one-
view multi-person, and multi-view multi-person. In
this paper, we focus our attention on the case of a
multi-view, multi-person scenario; that is, we have
more than one camera, and we estimate the 3D pose
a
https://orcid.org/0000-0002-1834-5221
b
https://orcid.org/0000-0002-8525-7133
c
https://orcid.org/0000-0002-6119-1184
d
https://orcid.org/0000-0003-4685-3634
of more than one person captured by these cameras.
One advantage of having a multi-view configuration
is avoiding ambiguities when using only one camera
to get 3D poses from 2D data.
Considering the multi-view multi-person sce-
nario, the literature has different approaches, starting
with geometric methods (Belagiannis et al., 2014a),
(Belagiannis et al., 2015), (Belagiannis et al., 2014b),
(Dong et al., 2019) and now achieving the state-of-
the-art with supervised techniques using neural net-
works (Huang et al., 2020), (Lin and Lee, 2021),
(Tu et al., 2020). Methods that follow the first ap-
proach use the 3D pictorial structure (3DPS) method
such as (Belagiannis et al., 2014a), (Belagiannis et al.,
2015), (Belagiannis et al., 2014b). Improvements
were made by (Dong et al., 2019) in the Mvpose
method; however, the supervised techniques based on
neural networks (Huang et al., 2020), (Lin and Lee,
2021), (Tu et al., 2020) came to achieve the top and
outperformed the geometric methods. Starting with a
Silva, D., Lima, J., Thomas, D., Uchiyama, H. and Teichrieb, V.
UMVpose++: Unsupervised Multi-View Multi-Person 3D Pose Estimation Using Ground Point Matching.
DOI: 10.5220/0011668800003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
607-614
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
607
Target view
Reference view
3D pose
estimator
Loss
Target
Reference
Ground point
Ground point
Ground point
Ground point
Target view
Reference view
Projection
Matching process
Ground points on
world coordinates
2D pose matched
2D pose matched
2D projection
2D projection
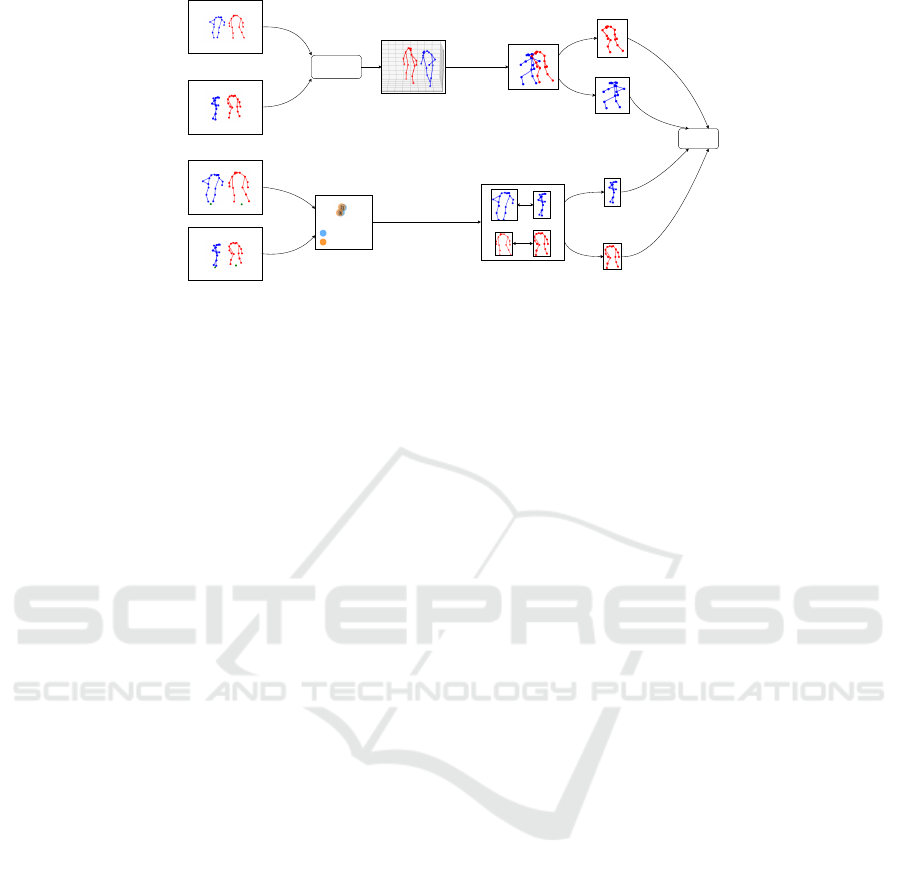
Figure 1: We have a well-defined target and reference views. Using the 2D poses estimated in each view, we generate a 3D
pose estimation as in (Lin and Lee, 2021). Each 3D skeleton is projected onto the reference view, and we compare it with the
matched 2D poses. These matching 2D poses are obtained using ground points. For each 2D pose, we have ground points
associated and utilizing a homography matrix as in (Lima et al., 2021), we project these points onto world coordinates. Taking
the Euclidean distance, we build a cost matrix used on the Hungarian Algorithm to perform the matching. With the 2D poses
matched, we compare them with a smooth L
1
loss (Girshick, 2015).
simple neural structure, (Huang et al., 2020) outper-
formed the best geometric method - Mvpose (Dong
et al., 2019). The VoxelPose work (Tu et al., 2020)
uses 3D CNNs with an approach focusing on directly
generating a 3D space with the skeletons instead of
estimating 2D poses and, based on these 2D skeletons
estimating the 3D pose. VoxelPose improved com-
pared with (Huang et al., 2020); however, 3D CNNs
have a high computational cost. Lin & Lee (Lin and
Lee, 2021) brought the plane sweep approach and
achieved the state-of-the-art. Furthermore, the com-
putational cost was highly reduced compared with
VoxelPose.
Methods that obtain the best results use supervised
learning to train the network. However, the need for
annotated data creates several practical limitations be-
cause of the cost of getting these 3D annotations. Our
work aims for an unsupervised approach, which al-
leviates the need to use labeled data in the training
process. Instead of comparing the 3D pose with the
annotated ground truth, we compute a loss consider-
ing the projected 2D pose in a reference view and the
matched 2D pose related to that projected pose. This
process is generated along with the training, and to
perform this calculation, we only need the camera pa-
rameters and an off-the-shelf 2D pose detector. Com-
pared with geometric methods, we also do not need
to follow defined steps such as (1) 2D pose estima-
tion, (2) matching between the 2D poses estimated
in each view, and (3) triangulation or the 3DPS ap-
proach to estimate the 3D pose based on the detected
2D poses. Our proposed method uses an end-to-end
solution (Lin and Lee, 2021) to obtain the 3D pose,
in which the input of our neural network is a matrix
score obtained using the plane sweep approach. To
calculate the reprojection error, we perform matching
to select the 2D poses that will be compared with the
2D projection of the estimated 3D pose. Our match-
ing process uses ground points as in (Lima et al.,
2021). We project these ground points onto world co-
ordinates and use Hungarian matching to obtain the
correspondences between the estimated target and ref-
erence 2D poses.
Using (Lin and Lee, 2021), we can estimate the
3D poses with an end-to-end solution. First, how-
ever, we need to perform some steps in parallel, such
as: taking the 2D poses in each view, calculating the
respective ground points, projecting them onto the
ground plane, using Hungarian matching, and com-
paring the 2D poses.
We propose an unsupervised approach to estimate
the 3D poses of multiple persons in a multi-view sce-
nario. The key points of our work are:
• We propose a new matching process using ground
points and a new loss function to optimize the
neural network using plane sweep pose.
• We do not need labeled data for 3D pose estima-
tion.
• We achieve state-of-the-art PCP measure when
compared with the best geometric methods as
(Belagiannis et al., 2014a), (Belagiannis et al.,
2015), (Belagiannis et al., 2014b), (Dong et al.,
2019). All these approaches do not need to use
labeled data, and we outperform them. Further-
more, the proposed method outperforms the exist-
ing unsupervised approach (UMVpose). We also
exceed some of the best-supervised techniques,
and our results are comparable to those from the
best-supervised process (Lin and Lee, 2021).
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
608

2 RELATED WORK
Ground point
Ground point
Ground point
Figure 2: We assign a ground point to each 2D pose. We
obtain this ground point as described in (Lima et al., 2021).
We estimate a bounding box for each 2D pose and build a
line between the ankles. So we take the middle point and
apply an offset in the direction of the ground. Our goal is to
represent each person by this point. Therefore the ground
points are our reference to match the 2D skeletons of the
target and reference views.
This section briefly discusses multi-view multi-
person methods based on geometric, supervised, and
unsupervised approaches.
2.1 Multi-View Multi-Person Geometric
Methods
The first works about 3D pose estimation of multi-
ple persons in a multi-view scenario were geometric-
based methods without using neural networks. The
technique in (Belagiannis et al., 2014a), for exam-
ple, detects 2D poses, obtains a reduced state space
using triangulation, and uses a 3DPS model in this
reduced state space to estimate the 3D pose. Simi-
larly, (Belagiannis et al., 2014b) also has a 3DPS ap-
proach, but now the 3DPS model is temporally con-
sistent, so they can track the individual and reduce the
state space, making the inference faster. The same au-
thors in (Belagiannis et al., 2015) make improvements
compared with (Belagiannis et al., 2014b). The ear-
lier work (Belagiannis et al., 2014b) defined a body
part as a limb, considering its orientation and posi-
tion, while (Belagiannis et al., 2015) reduced the pa-
rameterization of the body part to consider only the
3D position. The translation and rotation information
is implicitly encoded in a factor graph, facilitating
the inference task. The Mvpose approach in (Dong
et al., 2019), similarly to (Belagiannis et al., 2015),
obtains a state-space using triangulation based on 2D
detections from a multi-view scenario. Mvpose has
a well-defined pipeline, starting with 2D detections
and making a cluster of the 2D detections of each per-
son. After that, they reconstruct the 3D position. Be-
sides epipolar distance, Mvpose also uses a person-
reidentification method to help the clustering process
using a multi-way matching with cycle consistency.
Mvpose has the best PCP compared with the others
and was outperformed only by supervised methods.
Our method uses deep learning. However, we do
not need 3D-labeled data. Instead, we can perform
a reprojection error loss using geometric techniques,
avoiding the 3D comparison between the inference
and annotated ground truth. Furthermore, we outper-
form these methods.
2.2 Multi-View Multi-Person
Supervised Methods
Among the state-of-the-art supervised methods, we
have the (Huang et al., 2020), (Lin and Lee, 2021),
and (Tu et al., 2020) approaches. The process by
(Huang et al., 2020) is the first to achieve state-of-the-
art neural networks. It is also established with well-
defined steps, starting with 2D detections, generating
a cluster of the detections obtained by each different
view. VoxelPose (Tu et al., 2020) needs a well-defined
pipeline as (Huang et al., 2020). Instead, they work
directly on 3D space, avoiding problems generated
by noisy 2D detections. They use a Cuboid Proposal
Network (CPN) approach to localize all people and
a Pose Regression Network (PRN) to make the 3D
estimation. VoxelPose is robust to occlusions. How-
ever, it needs 3D CNNs, making this a highly costly
process. PlaneSweepPose (Lin and Lee, 2021) out-
performs VoxelPose (Tu et al., 2020), achieving state-
of-the-art, and it also inspired our work. Its approach
is faster than VoxelPose and is an end-to-end solution
based on the back-projection process. They build a
solution on a scenario captured by multiple cameras.
They generate a scoring matrix that is the input to the
neural network. In (Lin and Lee, 2021), we also have
a coarse-to-fine process since they estimate the per-
son’s position and, after that, the joint position.
Compared with these methods, we do not use 3D
labeled data to perform 3D pose estimation. Using
reprojection error, we have a new loss. The loss com-
pares the 2D pose projected onto the reference view
with the matched 2D pose using a smooth L
1
norm
(Girshick, 2015). We also propose a matching pro-
cess using ground points (Lima et al., 2021) instead
of the back-projection approach as in (de Franc¸a Silva
et al., 2022).
UMVpose++: Unsupervised Multi-View Multi-Person 3D Pose Estimation Using Ground Point Matching
609

2.3 Multi-View Multi-Person
Unsupervised Methods
Besides works that are fully geometric or based
on deep learning, there is the UMVpose tech-
nique (de Franc¸a Silva et al., 2022). Using a deep
learning approach, (de Franc¸a Silva et al., 2022) uses
geometric methods to replace the loss, comparing 2D
poses instead of 3D labels.
In (de Franc¸a Silva et al., 2022), they use (Lin and
Lee, 2021) plane sweep stereo method. This method
establishes target and reference views and performs
2D pose estimations in each view. They use the
plane sweep stereo algorithm to generate a scoring
matrix related to the cross-view consistency among
the views. In this manner, they obtain the person-level
and joint-relative level depth; combining these values,
they can estimate the 3D pose.
As we have mentioned before, the
(de Franc¸a Silva et al., 2022) uses (Lin and Lee,
2021) plane sweep stereo method. This work defines
target and reference views related to the multi-view
scenario. They consider each view the target and
make the 3D estimation under that view. Finally, the
estimated 3D poses (related to each view) are fused
and taken to the same global coordinate space.
The (de Franc¸a Silva et al., 2022) uses reprojec-
tion error as a new loss, avoiding the comparison of
3D poses, as they compare 2D poses obtained along
with training. Using PlaneSweepPose (Lin and Lee,
2021), they get a 3D pose, so instead of comparing
this 3D pose with the ground truth, they project them
onto 2D poses and compare them with matched 2D
poses. Therefore, 3D ground truth is not used, and
they can perform training with an unsupervised ap-
proach. The advantages of our method are the use of
other losses when comparing the 2D poses and a more
robust matching algorithm, thus way outperforming
UMVpose. In (de Franc¸a Silva et al., 2022), they
use back projection in the matching process, gener-
ating 3D poses from the 2D poses in the target view,
while we compare only one point (the ground point)
to perform matching. Furthermore, using our ap-
proach with smooth L1 loss, we can outperform the
MSE loss used in (de Franc¸a Silva et al., 2022).
Considering unsupervised methods, we also have
unsupervised 3D pose estimation on multi-view sce-
narios as (Sun et al., 2021). These works exper-
iment on the Human3.6M (Ionescu et al., 2013)
dataset and are a one-person method, different from
(de Franc¸a Silva et al., 2022).
3 UMVpose++
1
0
2
1
0
2
Target
Reference
Target
Reference
Figure 3: The matching process occurs using ground points.
Each person has a ground point, and it is projected onto
world coordinates. Next, we measure the distance between
these points to obtain a cost matrix. Finally, we use the
Hungarian algorithm to perform matching between target
and reference views based on our cost matrix.
UMVpose++ is an improved version of UMVpose
(de Franc¸a Silva et al., 2022). Similar to UMVpose,
the goal of UMVpose++ is to learn to estimate the 3D
poses of multiple persons from multi-view images in
an unsupervised manner. As in UMVpose, we aim
to generate a 3D pose using the plane sweep stereo
approach as in (Lin and Lee, 2021). We then project
the 3D pose estimated onto one of the reference views
and compare the projection with the matched 2D pose
as described in Figure 1. However, differently from
UMVpose, we do the matching between the target and
reference views using a different approach based on
ground points attached to each person (Lima et al.,
2021). Instead of back-projection, we estimate the
2D ground points related to each person’s 2D pose,
project these points onto world points with a homog-
raphy matrix, and use the Hungarian algorithm to
match the poses based on the distances between the
ground points.
Our method also uses reprojection error as in
(de Franc¸a Silva et al., 2022), but now, besides a new
matching process, we also propose a new loss. Dif-
ferently from (de Franc¸a Silva et al., 2022), which
uses the MSE loss, we propose to use the smooth
L
1
loss to optimize the network. Although the MSE
loss is a typical approach when we have 2D poses,
as we can see in works such as (Li et al., 2021); for
our neural network smooth L
1
loss is a better option.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
610

Other works such as (Brynte and Kahl, 2020) also use
smooth L
1
loss to calculate the reprojection error. The
neural structure in (Lin and Lee, 2021) uses smooth
L
1
loss for comparing depths instead of 2D positions.
The smooth L
1
loss in our 2D comparisons signifi-
cantly improved the results.
This matching process is used only during train-
ing. With the trained model, we can make 3D infer-
ences using the neural network provided by (Lin and
Lee, 2021).
3.1 Reprojection Error
In this section, we briefly review the concept of re-
projection error (Hartley and Zisserman, 2003). We
use this error to compute our loss by comparing 2D
poses during the training process. The reprojection
error will allow us to train without using 3D anno-
tated ground truth.
Using (Lin and Lee, 2021), we estimate a 3D pose
for each 2D pose on the target view. Each estimated
3D pose is projected onto the reference views so that
the 3D pose becomes a 2D pose. Then, we compare
these projected poses with the related 2D pose of the
respective reference view obtained from the matching
process. We calculate the comparison using a smooth
L
1
norm defined in our loss.
This way, we can claim that the reprojection error
is the process of projecting a 3D point onto an image
and comparing the position of the projected point with
the measured position of that point in the image.
3.2 Matching Process
This section describes how to perform the matching
process using ground points. We emphasize that this
matching process is used only in the training process.
We do not need to use matching in the inference.
We do unsupervised 3D pose estimation using re-
projection error as in (de Franc¸a Silva et al., 2022).
However, we perform the matching process using
ground points instead of back-projection matching.
The goal of the matching process is to identify the 2D
pose in a reference view related to the projected 2D
pose obtained from the 3D pose estimation. There-
fore, the matching process is crucial. Comparing the
correct 2D poses makes our loss coherent in the train-
ing process for estimating an accurate 3D pose.
The matching process is performed by using
ground points as defined in (Lima et al., 2021) and
illustrated in Figure 2. The ground point is first ob-
tained from the 2D pose. A line is built between
the right and left ankle joints, so we take the middle
point on this line, and, using an offset δ, we gener-
ate our ground point. This offset is obtained using the
2D skeleton. With the 2D pose, we take the highest
and lowest value of x and y coordinates; in this man-
ner, we have the dimensions of our bounding box as
in (Xiu et al., 2018). With the estimated bounding
box, we get the maximum y value of the bounding
box (bb
y
max
) and the highest y value between the right
(ra
y
) and left (la
y
) ankle joints, and finally compute δ
as follows:
δ = bb
y
max
− max(la
y
, ra
y
). (1)
The cameras on the Campus dataset are all cal-
ibrated. These 2D ground points are in the ground
plane; therefore, their Z world coordinate is zero, and
we project these points onto the world coordinate sys-
tem using a homography matrix H as in (Lima et al.,
2021):
s
x
y
1
= K[R
1
R
2
R
3
t]
X
Y
0
1
= K[R
1
R
2
t]
X
Y
1
= H
−1
X
Y
1
,
(2)
where K is the intrinsic parameters matrix, and the
extrinsic parameters matrix is [R|t]. The coordinates
(X,Y) are related to the world ground points, and (x,y)
are image points. The R
i
is the i-th column of R.
We take a pair of views and project the 2D ground
points of each view onto world coordinates, as we see
in Figure 3. We take the Euclidean distance between
each ground point on world coordinates and build a
cost matrix. Each row on this cost matrix corresponds
to the Euclidean distance between the ground point
in the world coordinates of one person on the target
view and all the ground points of the people on a
given reference view. In this manner each element of
the cost matrix is given by d
target
person
i
,re f erence
person
j
,
where d is the distance between the ground points in
world coordinates of two persons in given views. Us-
ing the Hungarian algorithm (Kuhn, 1955), we can get
the matching positions. Instead of using back projec-
tion, we now have a new matching process. This new
method is more robust than back projection because
we only compare one point instead of all the joints of
a 2D pose. We also do not need to make several 3D
projections of all 2D points. We only need to project
UMVpose++: Unsupervised Multi-View Multi-Person 3D Pose Estimation Using Ground Point Matching
611
the ground point in world coordinates. Another rea-
son the new method is more robust than back projec-
tion is that back projection may generate false match-
ings when there is no match in the reference view for
a given pedestrian in the target view. The cost matrix
is as follows:
Cost matrix =
d
11
d
12
... d
1n
d
21
d
22
... d
2n
.
.
.
.
.
.
.
.
.
.
.
.
d
n1
d
n2
. . . d
nn
. (3)
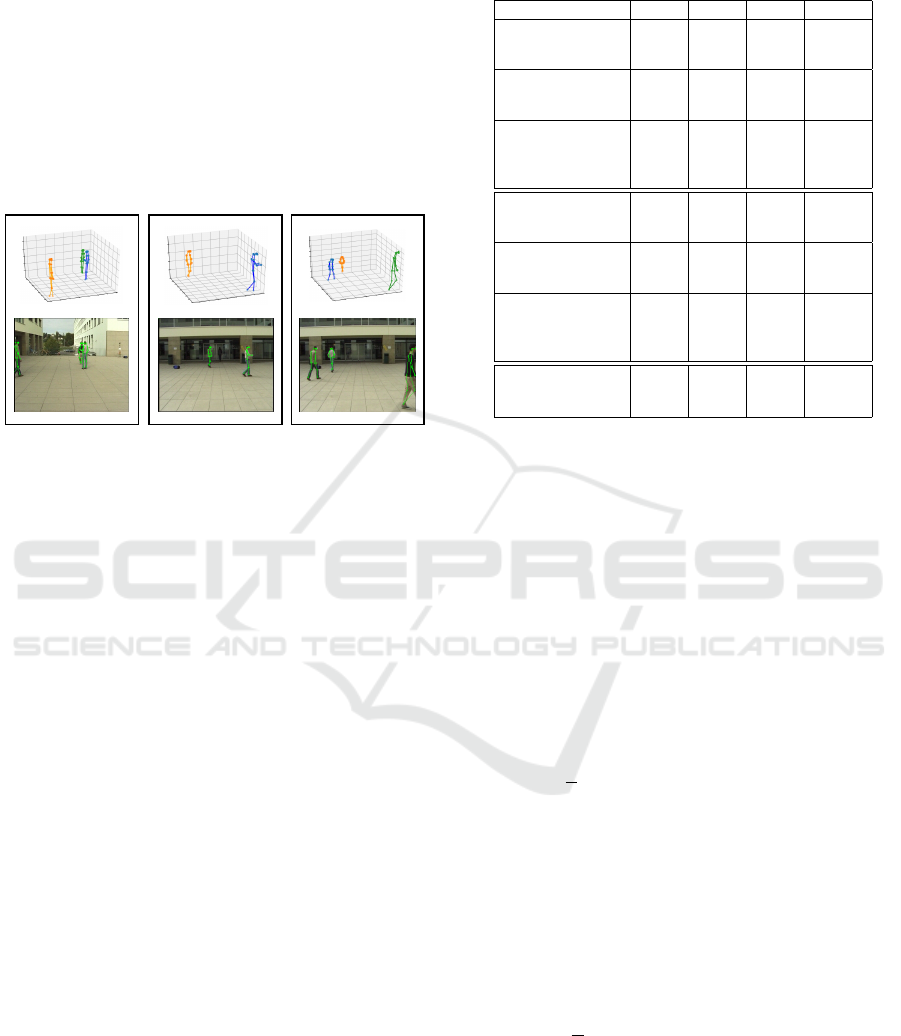
Figure 4: Some examples of our 3D pose estimation on
Campus Dataset. We provide many results showing the 2D
skeleton estimated and the corresponding 3D pose. These
examples allow us to do a qualitative analysis of our results.
3.3 Loss Function
Considering the neural network structure in (Lin and
Lee, 2021), we keep the same structure and propose
a new loss. Our goal is to use reprojection errors to
avoid the need for 3D labeled data. With the matched
poses and the 2D projections obtained from the esti-
mated 3D pose, it is now possible to compare them
and define a loss without using ground truth infor-
mation. Differently from UMVpose (de Franc¸a Silva
et al., 2022), we propose to use the smooth L
1
loss
instead of the MSE loss.
Losses that consist in comparing 2D poses gener-
ally use MSE loss as in (Li et al., 2021). However,
works as (Brynte and Kahl, 2020) use smooth L
1
loss
to calculate the reprojection error, and besides that,
the neural network in (Lin and Lee, 2021) also use
smooth L
1
loss.
The definition of the smooth L
1
loss is
smooth
L
1
(x) =
(
0.5x
2
if |x| < 1
|x| − 0.5 otherwise.
Using the smooth L
1
loss in our scenario is similar
to applying an M-estimator function such as the Hu-
ber one when computing the reprojection error. This
contributes to making our approach more robust to
outliers. We also experimented with the Kullback-
Leibler loss regularizer and AdaBelief as an opti-
mizer.
Table 1: Comparing PCP on Campus Dataset of our method
with the one from UMVpose (de Franc¸a Silva et al., 2022).
Method Actor1 Actor2 Actor3 Average
Silva et al. with
Adam
(MSE loss) 78.0 85.1 83.0 82.0
Silva et al. with
Adabelief
(MSE loss) 96.9 87.8 88.9 91.2
Silva et al. with
Adabelief and
KL regularizer
(MSE loss) 93.3 86.8 89.4 89.8
Silva et al. with
Adam
(Smooth L
1
loss) 98.6 92.7 98.3 96.5
Silva et al. with
Adabelief
(Smooth L
1
loss) 98.2 92.9 98.2 96.4
Silva et al. with
Adabelief and
KL regularizer
(Smooth L
1
loss) 97.4 92.5 98.6 96.2
Ours with Adam
and ground
points matching 98.4 93.4 98.6 96.8
In (Lin and Lee, 2021), they have two losses, one
for the person position and the other for the joint posi-
tion. Person position is related to the center hip joint,
that is, a single point. However, joint loss is about
all person’s joints. We propose reprojection error to
compute these losses instead of comparing the esti-
mation with the 3D ground truth. This way, we have
a pose loss (person position) and a joint loss (joint
position). These losses are related to different neu-
ral networks: the person-level depth regression net-
work and the joint-level depth regression network, as
demonstrated in (Lin and Lee, 2021). The pose loss
is defined as
L
pose
=
R
∑
r=0
1
P
P
∑
i=1
||position
r
(i)
pro j
− position
r
(i)
re f
||
s1
.
(4)
In Equation 4, P is the number of individuals in our
target view, position
r
(i)
pro j
is our projected pose, and
position
r
(i)
re f
is the matched pose in the reference
view obtained using ground point matching. The R
value is the number of reference views. The s1 index
is related to the Smooth L
1
loss. The joint loss is given
by
L
joint
=
R
∑
r=0
1
P
P
∑
i=1
J
∑
j=1
|| joint
r, j
(i)
pro j
− joint
r, j
(i)
re f
||
s1
,
(5)
where J is the total number of joints, joint
r, j
(i)
pro j
is
a joint projected onto the respective reference view,
and joint
r, j
(i)
re f
is a joint from the matched 2D pose
in the reference view. The s1 index designates that the
loss uses Smooth L
1
loss.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
612

4 EXPERIMENTS AND RESULTS
This section presents the 3D pose estimation exper-
iments as illustrated in Figure 4. First, we generate
the 3D pose of multiple persons in a multi-view sce-
nario. Then, we perform the training process using a
public dataset, and the metric evaluated is the Percent-
age of Correctly estimated Parts (PCP) (Wang et al.,
2021). Finally, we evaluate our method by comparing
its PCP with the ones from previous works (geometric
and neural network approaches).
4.1 Dataset
The dataset used was the Campus dataset
1
(Belagian-
nis et al., 2014a), and the 2D poses were estimated
using HR-Net (Sun et al., 2019), which is pre-trained
on the MS-COCO dataset (Lin et al., 2014), and the
2D pose has 17 joints. The Campus is one of the most
used datasets in works about the multi-view, multi-
person scenario. This dataset was used by the ge-
ometric and supervised methods to which we com-
pared our results. The Campus is an outdoor dataset
with mainly three actors. It was obtained with three
cameras capturing three persons interacting with each
other. The 3D ground truth annotations are incom-
plete, so we use synthesized 3D MoCap poses as in
(Lin and Lee, 2021) to perform our training. As in
previous works (Dong et al., 2019), (Huang et al.,
2020), (Tu et al., 2020), the evaluation is performed
on frames 350-470 and 650-750.
4.2 Metrics
The evaluation metric used is the PCP. This is the met-
ric that other works used, so to be fair in our compar-
ison we also use this metric. PCP (Wang et al., 2021)
is given by
||s
n
− ˆs
n
|| + ||e
n
− ˆe
n
||
2
≤ α||s
n
− e
n
||, (6)
where s
n
and e
n
are the start and end coordinates of
ground truth n-th body part, ˆs
n
and ˆe
n
are the corre-
sponding estimations, and α is a given threshold pa-
rameter, in our case α = 0.5.
4.3 Comparison with UMVpose
Considering the updates in our UMVpose++, we per-
form experiments comparing it with original UMV-
pose (de Franc¸a Silva et al., 2022). We also evaluate
UMVpose using a smooth L
1
loss.
1
https://campar.in.tum.de/Chair/MultiHumanPose
Table 2: Comparing PCP on Campus Dataset with the state-
of-the-art.
Method Actor1 Actor2 Actor3 Average
Belagiannis
et al., 2014a 82.0 72.4 73.7 75.8
Belagiannis
et al., 2014b 83.0 73.0 78.0 78.0
Belagiannis
et al., 2015 93.5 75.7 84.4 84.5
Ershadi-Nasab
et al., 2018 94.2 92.9 84.6 90.6
Dong
et al., 2019 97.6 93.3 98.0 96.3
de Franc¸a Silva
et al., 2022 96.9 87.8 88.9 91.2
Ours 98.4 93.4 98.6 96.8
Huang
et al., 2020 98.0 94.8 97.4 96.7
Tu
et al., 2020 97.6 93.8 98.8 96.7
Lin and Lee,
2021 98.4 93.7 99.0 97.0
Using ground point matching and smooth L
1
loss
instead of MSE loss, we obtain better results than
(de Franc¸a Silva et al., 2022) as we see in Table 1.
Keeping the back-projection matching and chang-
ing only the loss function, we got expressive improve-
ments in the PCP values. However, back-projection
is a complex manner of matching between target
and reference views and may also generate incor-
rect matches. Therefore, we change the matching for
using ground points. As a result, the ground point
matching with the Adam optimizer outperforms the
back-projection matching on average and in all actors.
4.4 Comparison with State-of-the-Art
We show Table 2 comparing UMVpose++ with all
other methods. We divided the table into two parts:
the first part contains unsupervised/geometric meth-
ods, and the second part includes supervised methods.
We outperform all the unsupervised methods with our
approach using ground points in the matching process
and smooth L
1
reprojection error loss. We outperform
on average and also in all the actors.
Compared to the supervised methods, we outper-
form (Huang et al., 2020) and (Tu et al., 2020) on av-
erage, being below (Lin and Lee, 2021) only. More-
over, considering that (Huang et al., 2020) and (Tu
et al., 2020) need 3D annotations, our method has an
impressive advantage.
5 CONCLUSION
In this work, we build a solution with an unsupervised
approach using a simpler and more robust matching
UMVpose++: Unsupervised Multi-View Multi-Person 3D Pose Estimation Using Ground Point Matching
613

process. By using ground points, we do not need to
make 3D back-projections to perform the matching,
and by comparing only one point per person, we can
obtain the corresponding poses in two views. Besides
that, instead of comparing the 2D poses with MSE,
we use a smooth L
1
loss. The results show a huge po-
tential for using unsupervised losses instead of super-
vised ones based on 3D annotations. In future work,
we intend to do experiments on more datasets and to
refine the loss using other regularizers such as Jensen-
Shanon (Fuglede and Topsoe, 2004).
REFERENCES
Belagiannis, V., Amin, S., Andriluka, M., Schiele, B.,
Navab, N., and Ilic, S. (2014a). 3d pictorial structures
for multiple human pose estimation. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 1669–1676.
Belagiannis, V., Amin, S., Andriluka, M., Schiele, B.,
Navab, N., and Ilic, S. (2015). 3d pictorial structures
revisited: Multiple human pose estimation. IEEE
transactions on pattern analysis and machine intelli-
gence, 38(10):1929–1942.
Belagiannis, V., Wang, X., Schiele, B., Fua, P., Ilic, S.,
and Navab, N. (2014b). Multiple human pose estima-
tion with temporally consistent 3d pictorial structures.
In European Conference on Computer Vision, pages
742–754. Springer.
Brynte, L. and Kahl, F. (2020). Pose proposal critic: Robust
pose refinement by learning reprojection errors. arXiv
preprint arXiv:2005.06262.
de Franc¸a Silva, D. W., do Monte Lima, J. P. S., Mac
ˆ
edo,
D., Zanchettin, C., Thomas, D. G. F., Uchiyama, H.,
and Teichrieb, V. (2022). Unsupervised multi-view
multi-person 3d pose estimation using reprojection er-
ror. In International Conference on Artificial Neural
Networks, pages 482–494. Springer.
Dong, J., Jiang, W., Huang, Q., Bao, H., and Zhou, X.
(2019). Fast and robust multi-person 3d pose esti-
mation from multiple views. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 7792–7801.
Fuglede, B. and Topsoe, F. (2004). Jensen-shannon diver-
gence and hilbert space embedding. In International
Symposium onInformation Theory, 2004. ISIT 2004.
Proceedings., page 31. IEEE.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision, pages
1440–1448.
Hartley, R. and Zisserman, A. (2003). Multiple view geom-
etry in computer vision. Cambridge university press.
Huang, C., Jiang, S., Li, Y., Zhang, Z., Traish, J., Deng,
C., Ferguson, S., and Xu, R. Y. D. (2020). End-to-
end dynamic matching network for multi-view multi-
person 3d pose estimation. In European Conference
on Computer Vision, pages 477–493. Springer.
Ionescu, C., Papava, D., Olaru, V., and Sminchisescu, C.
(2013). Human3. 6m: Large scale datasets and pre-
dictive methods for 3d human sensing in natural envi-
ronments. IEEE transactions on pattern analysis and
machine intelligence, 36(7):1325–1339.
Kuhn, H. W. (1955). The hungarian method for the as-
signment problem. Naval research logistics quarterly,
2(1-2):83–97.
Li, Z., Ye, J., Song, M., Huang, Y., and Pan, Z. (2021). On-
line knowledge distillation for efficient pose estima-
tion. In Proceedings of the IEEE/CVF International
Conference on Computer Vision, pages 11740–11750.
Lima, J. P., Roberto, R., Figueiredo, L., Simoes, F., and
Teichrieb, V. (2021). Generalizable multi-camera 3d
pedestrian detection. In Proceedings of the IEEE/CVF
conference on computer vision and pattern recogni-
tion, pages 1232–1240.
Lin, J. and Lee, G. H. (2021). Multi-view multi-person 3d
pose estimation with plane sweep stereo. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 11886–11895.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Sun, C., Thomas, D., and Kawasaki, H. (2021). Unsuper-
vised 3d human pose estimation in multi-view-multi-
pose video. In 2020 25th International Conference on
Pattern Recognition (ICPR), pages 5959–5964. IEEE.
Sun, K., Xiao, B., Liu, D., and Wang, J. (2019). Deep high-
resolution representation learning for human pose es-
timation. In Proceedings of the IEEE/CVF conference
on computer vision and pattern recognition, pages
5693–5703.
Tu, H., Wang, C., and Zeng, W. (2020). Voxelpose: To-
wards multi-camera 3d human pose estimation in wild
environment. In European Conference on Computer
Vision, pages 197–212. Springer.
Wang, J., Tan, S., Zhen, X., Xu, S., Zheng, F., He, Z., and
Shao, L. (2021). Deep 3d human pose estimation: A
review. Computer Vision and Image Understanding,
210:103225.
Xiu, Y., Li, J., Wang, H., Fang, Y., and Lu, C. (2018). Pose
Flow: Efficient online pose tracking. In BMVC.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
614
