
Sequential Spatial Transformer Networks for Salient Object
Classification
David Dembinsky
1,2,∗
, Fatemeh Azimi
1,2,∗
, Federico Raue
2
, J
¨
orn Hees
2
, Sebastian Palacio
2
and Andreas Dengel
1,2
1
TU Kaiserslautern, Germany
2
German Research Center for Artificial Intelligence (DFKI), Germany
{firstname.lastname}@dfki.de
Keywords:
Sequential Spatial Transformer Networks, Reinforcement Learning, Object Classification.
Abstract:
The standard classification architectures are designed and trained for obtaining impressive performance on
dedicated image classification datasets, which usually contain images with a single object located at the image
center. However, their accuracy drops when this assumption is violated, e.g., if the target object is cluttered
with background noise or if it is not centered. In this paper, we study salient object classification: a more
realistic scenario where there are multiple object instances in the scene, and we are interested in classifying
the image based on the label corresponding to the most salient object. Inspired by previous works on Rein-
forcement Learning and Spatial Transformer Networks, we propose a model equipped with a trainable focus
mechanism, which improves classification accuracy. Our experiments on the PASCAL VOC dataset show that
the method is capable of increasing the intersection-ver-union of the salient object, which improves the clas-
sification accuracy by 1.82 pp overall, and 3.63 pp for smaller objects. We provide an analysis of the failing
cases, discussing different aspects such as dataset bias and saliency definition on the classification output.
1 INTRODUCTION
With the advancement of deep learning techniques
during the last decade (Krizhevsky et al., 2012;
Vaswani et al., 2017), these methods achieve impres-
sive performance in a variety of tasks such as image
classification and object detection (He et al., 2015;
Ren et al., 2015). The majority of architectural ad-
vances based on Convolutional Networks (Xie et al.,
2017; Szegedy et al., 2017) or Transformer Networks
(Dosovitskiy et al., 2020) evaluate on high-quality
data such as CIFAR (Krizhevsky et al., 2009) or Ima-
genet (Deng et al., 2009). However, a side-product of
focusing on increasing the model accuracy on special-
ized and curated datasets is the lack of out-of-domain
generalization (Hendrycks and Dietterich, 2019) and
poor performance on images where the region of in-
terest (RoI) is not placed in the center of the image, let
alone if the scene is cluttered (Jaderberg et al., 2015;
Azimi et al., 2019).
In this paper, we study the task of salient object
classification: A setup in which we aim at classifying
the most salient object in a scene where there are mul-
tiple object instances. Previous work has proposed
*
Equal contribution
various solutions for this task including attention by
(Mnih et al., 2014) or employing spatial transformer
networks (STN), transforming the input such that it is
easier to classify (Jaderberg et al., 2015; Azimi et al.,
2019); however, these methods were mainly applied
to simplistic scenarios and synthetic datasets.
In this work, we build on top of the Sequen-
tial Spatial Transformer Network (SSTN) algorithm
(Azimi et al., 2019). We extend their work by
multiple architectural and design improvements and
evaluate our model on the challenging real-world
dataset PASCAL VOC (Everingham et al., 2010). We
choose this method as the RL-based solution in (Az-
imi et al., 2019) allows us to employ a variety of non-
differentiable training objectives.
Our main hypothesis is that zooming in on the
salient object and cropping out secondary objects re-
garded as clutter is beneficial for the classifier. Hence,
increasing the Intersection over Union (IoU) of the
salient object (i.e. the ratio between the salient ob-
ject’s bounding-box area and the image area) can be
used as a training signal. We study this assumption in
Section 4.3.1.
Thanks to the availability of object detection
information in PASCAL VOC (Everingham et al.,
2010), we use bounding-box information to compute
328
Dembinsky, D., Azimi, F., Raue, F., Hees, J., Palacio, S. and Dengel, A.
Sequential Spatial Transformer Networks for Salient Object Classification.
DOI: 10.5220/0011667100003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 328-335
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
the IoU of different object instances in the scene. In-
stead of relying on human annotations for identifying
the salient object, we resort to the following approx-
imation: we assume object size as an estimator for
saliency and consider the largest object as the salient
one. We extend the algorithm proposed in (Azimi
et al., 2019) by employing Q-Learning, which is a
more effective algorithm in terms of scaling to high
dimensional input data such as images. Moreover, we
propose reward-shaping functions that attempt to di-
rectly increase the IoU of the salient object, result-
ing in improved classification accuracy. Our method
named DQ-SSTN increases the IoU of the salient ob-
ject by 11.31 pp and the overall classification accu-
racy by 1.82 pp. We observe that our method is espe-
cially effective for smaller objects (objects that cover
less than 20 percent of the image area), where we ob-
tain an improvement of 3.63 pp in accuracy. In Sec-
tion 4.4 we study the effect of the dataset characteris-
tics and saliency assumptions in failure scenarios.
2 RELATED WORK AND
BACKGROUND
In this section, we provide the preliminaries used
as the foundation of our work. We briefly give an
overview of the utilized algorithms from the rein-
forcement learning literature, followed by an intro-
duction to Sequential Spatial Transformer Networks.
2.1 Reinforcement Learning
Reinforcement Learning (RL) is a learning paradigm
for training a learner (agent) by maximizing an ob-
jective via interacting with an environment and learn-
ing from the acquired experiences (Sutton and Barto,
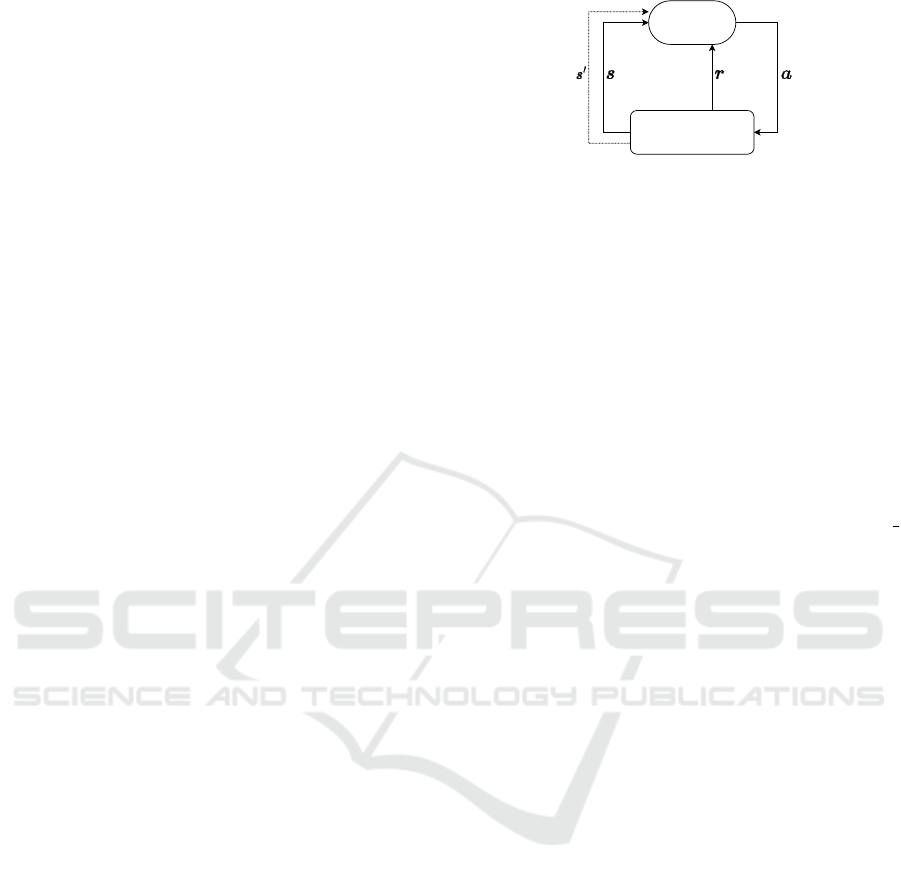
2018). The RL framework is based on a Markov De-
cision Process (MDP) consisting of a set of states s,
actions a, and rewards r. The goal is to train an agent
which maximizes the reward function via searching
for the optimal action-selection policy through inter-
actions with the environment, as shown in Figure 1.
Each action selection results in receiving a reward and
a change in the current state.
The proposed algorithms for finding the optimal
action policy can be categorized into two main groups
of Policy Gradient and Q-learning. In this paper, we
utilize Q-learning due to its good performance in pro-
cessing high-dimensional states such as images (Mnih
et al., 2013). In Q-learning, the model learns a value
function q
∗
that estimates the expected reward for
each state-action pair. This function is learned based
on the Bellman Optimality equation:
Agent
Environment
Figure 1: The episodic MDP: First the agent observes the
environment’s state s and selects an action a which changes
the state to s
′
. Based on the impact of the action, the agent
receives the reward r. We train the agent to choose a se-
quence of actions leading to the maximum expected reward.
q
∗
θ
(s, a) = r(s, a) + γmax
a
′
q
∗
θ
(s
′
(s, a), a
′
) (1)
where γ is a hyperparameter and θ represents the net-
work’s parameters. Since Equation 1 is greedy (max
operator) and initially the model is not trained, we use
the ε-greedy strategy, a trade-off between exploration
of the state-action space and exploitation of the ex-
pected rewards (Equation 2). Exploration decreases
with the number of taken steps n with decay d:
a =
a
rand
, if p < ε
end
+ (1 − ε
end
) · e
−
n
d
argmax
ˆa
q
∗
(s, ˆa), otherwise
(2)
a
rand
corresponds to an action selected randomly, p ∼
U(0, 1), and ε
end
and d are hyperparameters.
In Equation 1, there is a strong correlation be-
tween consecutive updates, which is detrimental to
the training procedure. This limitation is addressed
by utilizing a replay memory (Mnih et al., 2013), as a
way to break the correlation between the training sam-
ples. In the replay memory, each experience (s, a, r, s
′
)
is stored in a buffer and then drawn at random to per-
form a training step. Since the update rule in Equa-
tion 1 is dependent on the old parameters itself (θ), a
target network is additionally used for predicting the
expected reward (Mnih et al., 2015). The target net-
work has an identical architecture as the agent net-
work (q in Equation 1). It is not trained by gradient
descent, but its weights are periodically updated from
the agent network.
2.2 Spatial Transformer Networks
The Spatial Transformer Network (STN) (Jaderberg
et al., 2015) is a network architecture proposed to
learn modifying the input image by generating pa-
rameters of an affine transformation. The network’s
parameters are trained by minimizing a differentiable
objective such as classification loss. (Azimi et al.,
2019) propose a Sequential Spatial Transformer Net-
work (SSTN), which uses RL to find the optimal
Sequential Spatial Transformer Networks for Salient Object Classification
329
Q Network
(Agent)
Replay
Memory
Classifier
Reward
Function
Bilinear Sampler
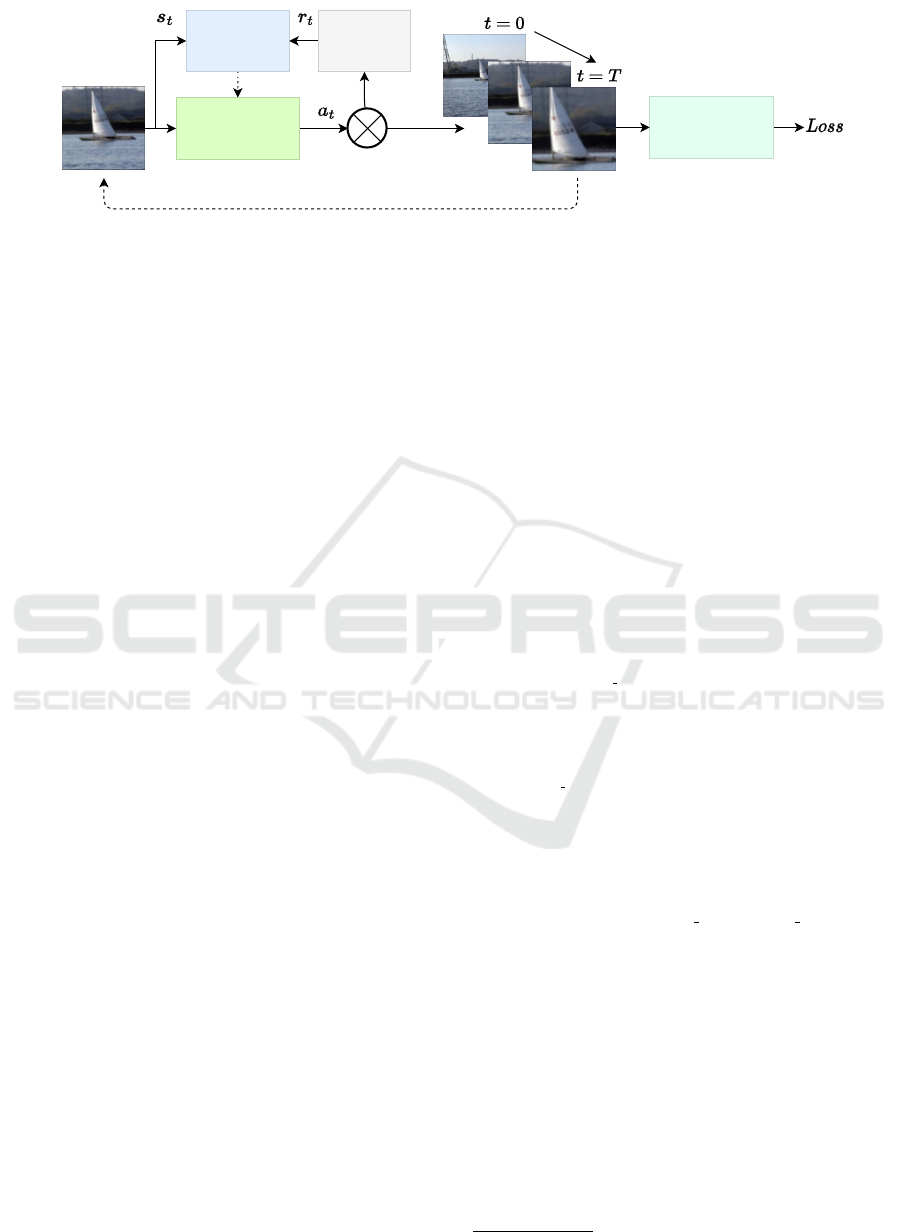
Figure 2: The overall architecture of DQ-SSTN. Our model sequentially modifies the input image by applying a series of
simple and discrete transformations (a
t
) selected by an agent trained to maximize the overall obtained reward (r
t
).
transformation. Rather than generating continuous
transformation parameters, they decompose the trans-
formation into a sequence of discrete and predefined
simple transformations, which are chosen iteratively.
We extend their approach, as the RL-based formu-
lation allows us to work with non-differentiable ob-
jectives, as discussed in the following section.
3 METHOD
In this section, we study the problem of salient ob-
ject classification where saliency is determined based
on an object’s bounding-box size, as discussed fur-
ther in Section 4.1.1 Opposite to standard image clas-
sification models working with curated images cen-
tered around a single salient object (Krizhevsky et al.,
2009; Deng et al., 2009), we focus on a more realistic
scenario where input images are cluttered with multi-
ple objects and the network has to classify the image
based on the most salient object. Since the original
SSTN method (Azimi et al., 2019) is limited to pro-
cessing small, gray-scale images, our goal is to extend
this algorithm for working with real-world data.
While SSTN uses Policy Gradient for training the
RL agent, we employ the Q-learning algorithm as it
works better for higher-dimensional data. Addition-
ally, we experiment with a variety of reward func-
tions, that based on different metrics, aim to boost
the performance of the downstream classifier. Thanks
to the RL-based framework, our model is flexible to
work with non-differentiable training objectives. Fig-
ure 2 visualizes the overall architecture of our model.
As mentioned in Section 2.1, to describe the MDP
framework, we have to define state space, action set,
and reward functions. For the state space s
t
, we con-
sider the transformed image at time t which has un-
dergone a sequence of transformations (the actions
selected by the agent). Our action set a
t
consists of
6 discrete affine transformations with fixed parame-
ters including translation in 4 directions, zooming and
identity. Identity allows early stopping while training
in batches and using a fixed transformation length T .
Regarding the reward r
t
, we initially experiment
with the functions proposed by (Azimi et al., 2019)
referred to as Continuous loss-reward and Discrete
Acc-reward. Continuous loss-reward is the difference
between the classification loss before and after apply-
ing the selected action (hence the reward is positive
when reducing the loss value). Discrete Acc-reward
rewards the agent with +1 if the classifier’s prediction
changes from incorrect to correct or −1 vice-versa.
We further explore the possibility of improving
the classifier accuracy by learning to increase the IoU
of the salient object. To this end, we positively reward
the agent when the selected action results in increas-
ing the area of the salient object. This way, the agent
is encouraged to zoom around the salient object. This
reward named Continuous IoU-reward is defined as:
r
(c iou)
t
= IoU
t
− IoU
t−1
(3)
We also experiment with the discrete version of
the IoU and refer to it as Discrete IoU-reward:
r
(d iou)
t
=
+1, if IoU
t
> IoU
t−1
−1, if IoU
t
< IoU
t−1
0, else
(4)
The last reward for training the model is a
weighted combination of loss-reward and IoU-
reward, using hyperparameters α and β:
r
(combined)
t
= α · r
(c loss)
t
+ β · r
(d iou)
t
(5)
The objective for training the classifier is the stan-
dard cross-entropy loss, and for the DQ-SSTN we use
Huber loss, a loss that serves as a compound of abso-
lute and squared loss (Huber, 1964).
4 EXPERIMENTS
In this section, we provide the implementation details,
as well as an analysis of the obtained results on the
PASCAL VOC dataset (Everingham et al., 2010). The
code is publicly available
1
.
1
https://git.opendfki.de/david.dembinsky/dq-sstn
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
330
4.1 Implementation Details
4.1.1 Dataset
For evaluation, we use PASCAL VOC (Everingham
et al., 2010), a real-world dataset with pictures con-
taining multiple objects from 20 object classes. The
dataset provides the bounding box and the category
of each object. We combine the versions of 2007 and
2012 to get as many images as possible, resulting in a
training set of 8218 and a test set of 8333 frames.
For the classification ground-truth label, we con-
sider the category of the object with the largest
area. Consequently, the Top-1 accuracy depends on
whether the prediction corresponds to the largest vis-
ible object. As additional metrics, we use the Top-2
and Any accuracies for evaluation (we only optimize
over Top-1 accuracy). The Top-2 accuracy addition-
ally allows the prediction to be the second largest ob-
ject, and the Any accuracy permits the prediction to
match any object present within an image.
We highlight that using the PASCAL VOC dataset
for single-class labeling results in a non-uniform class
distribution, where class person has more than 1700
images compared to other classes, which range from
below 200 to 600 images per class. We discuss a pos-
sible bias towards the dominant class in Section 4.4.1.
4.1.2 Training Setup
The backbone of the classifier and the Q-network con-
sists of a ResNet18 (He et al., 2015) where the last
fully connected layer is modified to match the num-
ber of the object classes and the number of actions,
respectively. ResNet18 is an architecture quite suc-
cessful in image classification tasks, and the library
PyTorch (Paszke et al., 2017) provides pre-trained
weights. We downscale the input images to 224 × 224
to match the ResNet18s implementation and perform
horizontal flipping augmentations to increase the va-
riety in the dataset. We document the best set of hy-
perparameters found by experimentation. The replay
memory stores 1000 transitions. The ε-greedy strat-
egy Equation 2 uses d = 50000 and ε
end
= 0.05. For
Q-Learning (Equation 1) we use γ = 0.95 and update
our target-net after 100 agent updates. We train our
model with Adam (Kingma and Ba, 2015) optimizer
and a learning rate of 5 · 10
−6
for 50 epochs. The
trajectories are constructed with a length of T = 10
transformations. The DQ-SSTN’s transformations in-
clude translation by 4 pixels in each cardinal direction
and zooming-in by a factor of 0.8. The weight factors
in Equation 5 used are α = 1 and β = 0.8.
4.2 Main Results
Table 1 provides a comparison between the baseline
classifier without DQ-SSTN and our proposed DQ-
SSTN method using different reward functions. As
can be seen from the results, the best accuracy was ob-
tained employing the discrete IoU reward, improving
Top-1 accuracy by 1.82 pp, Top-2 accuracy by 1.86
pp and Any accuracy by 1.23 pp, respectively.
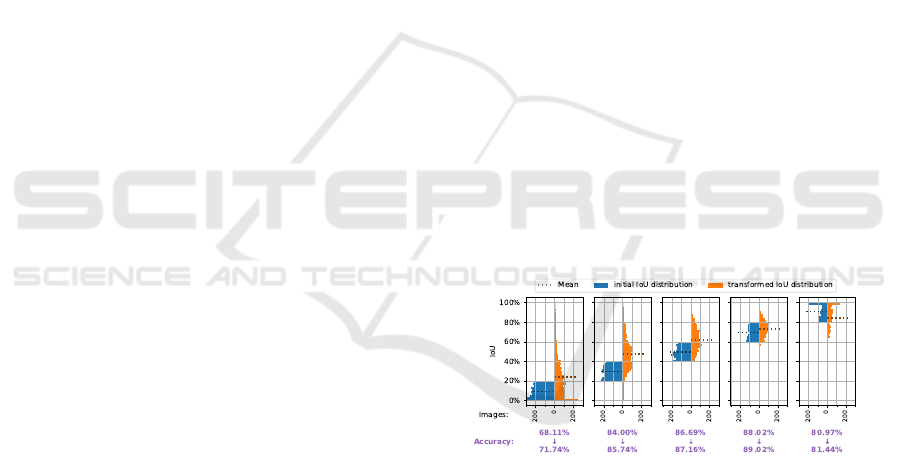
In Figure 3, we provide an analysis of the IoU and
classification accuracy using the best-found setup. We
visualize the IoU of the target class before and af-
ter applying the transformations selected by our DQ-
SSTN model. To better understand the impact of the
transformations on objects with different sizes, we di-
vide the test-set images into 5 bins, considering the
initial IoU. Applying the DQ-SSTN transformations
leads to an average increase of 11.31 pp in the tar-
get class IoU (the dotted line in this figure shows the
average IoU per bin). Additionally, we evaluate the
classification accuracy for each bin before and after
applying transformations. We observe that our model
is more effective in improving the classification accu-
racy of smaller objects, increasing it by 3.63 pp for
objects with an IoU less than 20%. Interestingly, the
IoU of the right-most bin decreases while the accu-
racy increases; this behavior will be observed in Sec-
tion 4.3.1 again and discussed in Section 4.4.2.
Visual examples of the transformations learned by
our model are illustrated in Figure 7.
Figure 3: IoU and classification accuracy before and after
applying the DQ-SSTN transformations. The dataset is split
into five bins according to the initial IoU. Classification ac-
curacy changes are noted under each column. DQ-SSTN
is especially useful for smaller objects (first bin) where the
classification accuracy is improved by 3.63 pp.
4.3 Ablation
4.3.1 Correlation of IoU and Accuracy
The main idea behind our DQ-SSTN is to zoom in on
the most salient object. The underlying assumption is
that classification accuracy improves with increasing
the target object’s IoU. To confirm this, we run an ex-
periment where we construct multiple datasets, each
Sequential Spatial Transformer Networks for Salient Object Classification
331
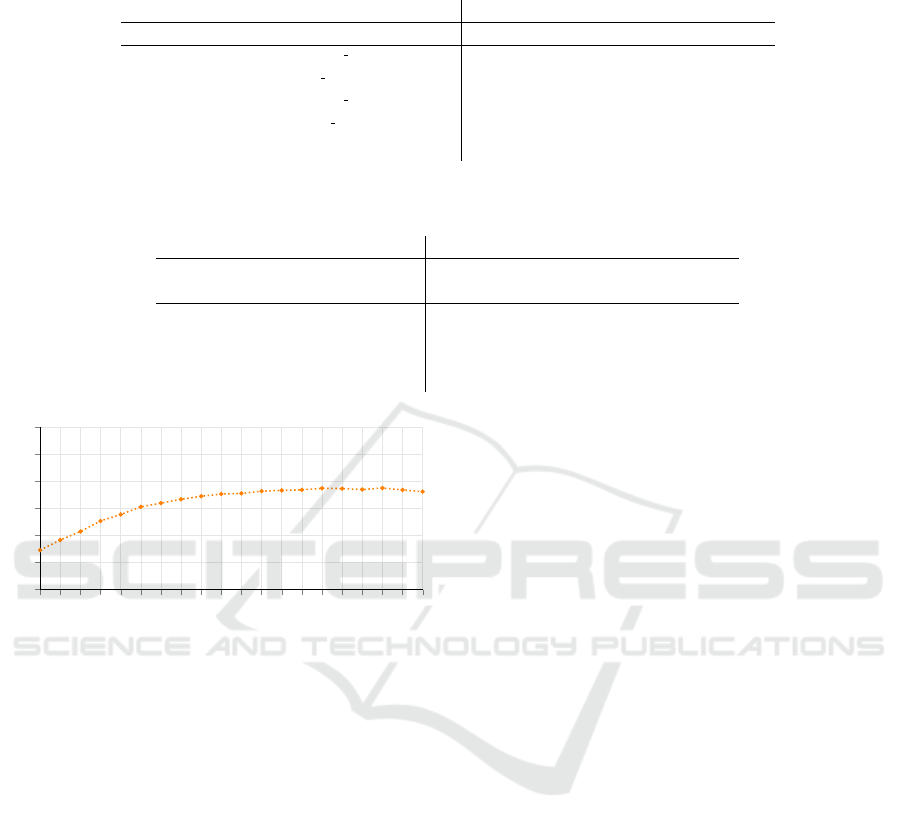
Table 1: Comparison of classification accuracy of the baseline with our method when using different reward functions, on
PASCAL VOC (Everingham et al., 2010). We obtained the best results with the discrete IoU-based reward signal.
Method Top-1 (%) Top-2 (%) Any (%)
Baseline classifier 80.04 82.97 88.22
Continuous loss-reward (r
c loss
) 80.84 83.75 88.83
Discrete Acc-reward (r
d acc
) 80.43 83.61 88.67
Continuous IoU-reward (r
c iou
) 80.15 83.09 88.19
Discrete IoU-reward (r
d iou
) 81.86 84.83 89.45
Weighted combination-reward (r
combined
) 81.54 84.56 89.27
Table 2: The impact of different hard-minig techniques tried on the classification accuracy. Whilst the weight by accuracy
methods improved the Top-1 or Top-2 metric, respectively, by 0.06pp, we do not consider this as a noteworthy improvement.
Method Top-1 (%) Top-2 (%) Any (%)
Baseline classifier 80.04 82.97 88.22
DQ-SSTN without hard mining 81.80 85.25 89.72
Weight reward by inverse IoU 81.40 85.13 89.60
Weight loss by inverse IoU 81.08 84.72 89.32
Weight reward by accuracy 81.86 84.83 89.45
Weight loss by accuracy 81.75 85.31 89.69
5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
65
70
75
80
85
90
95
X
X
IoU of salient object in PASCAL VOC test-dataset
Classification Accuracy
Manual IoU
Baseline
DQ-SSTN
Figure 4: Our experiment indicates a correlation between
salient object IoU and classification accuracy (both in %).
Zooming on the target object (increase in IoU) leads to bet-
ter classification accuracy for this object.
with a constant IoU enforced synthetically. To this
end, we determine the salient object by the size of the
bounding box and crop around it such that we achieve
a fixed IoU for that object. Furthermore, we include
random translations to hinder the network from cheat-
ing and getting biased based on the positioning of the
object. This results in a dataset, where each image’s
salient object has the same, constant IoU.
After constructing 20 datasets with different IoUs,
we train and evaluate a classifier on each dataset sep-
arately. As can be seen in Figure 4, an increase in the
IoU indeed leads to improved classification accuracy.
We observe, that adjusting the IoU to more than 90%
reduces the accuracy. This shows that extreme zoom-
ing has a negative impact on performance, as infor-
mative parts of the object can be displaced out of the
classifier’s focus (Selvaraju et al., 2016; Zhou et al.,
2016). We discuss this more in-depth in Section 4.4.2.
4.3.2 Hard Mining
Our PASCAL VOC dataset suffers from a consider-
able imbalance in both class distribution and IoU dis-
tribution. This imbalance might hurt performance as
the learned solution could be biased towards the dom-
inant category. Hard mining is a training technique
that has been proven effective (Shrivastava et al.,
2016; Dong et al., 2017) to alleviate the effect of data
imbalance by assigning a higher weight to underrep-
resented (therefore more challenging) data samples.
To this end, we experiment with multiple hard-
mining strategies and provide the results in Table 2.
As our overall objective consists of the classification
and the reward maximization terms, we can perform
hard mining by re-weighting the classifier’s loss or the
reward of the more challenging data samples.
Initially, we consider IoU as a measure of a
data sample hardness. Therefore, we reweigh ei-
ther the loss function or the reward signal by the in-
verse of IoU, assigning higher importance to sam-
ples with smaller IoU (Weight reward by inverse IoU
and Weight loss by inverse IoU). Surprisingly, our re-
sults did not improve with this technique. Next, we
reweigh the data samples based on the performance
of the baseline classifier. If an image is classified
incorrectly, we assign a weight of 1 and, if it’s pre-
dicted correctly, a constant weight < 1. This assigns
higher importance to those images which are more
difficult for our classifier (Weight reward by accuracy
and Weight loss by accuracy). The results show small
improvements of 0.06 pp for either Top-1 or Top-2 ac-
curacy, hence, we do not find these techniques useful
to our algorithm.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
332
4.4 Limitations
In this section, we provide a detailed analysis of the
results to better understand the impact of the dataset
and the assumptions that we made about object size
and saliency. We observe that the dominance of class
person biases the classifier’s prediction. Additionally,
we show that defining saliency is a non-trivial task
and can have a serious impact on the model.
4.4.1 Bias of the Person Class
One property of the PASCAL VOC dataset is an im-
balance in the class distribution. Based on object size,
about 20% of all images are assigned to person class.
As a result, we observe that the attention of our
DQ-SSTN gets drawn towards persons: If a person is
present in the scene, the classifier is biased towards
classifying the image as person category. In Table 3,
we provide statistics for misclassifications consider-
ing whether a person is present as a secondary ob-
ject. It is clearly visible, that in cases where a person
is present, the classifier is biased toward this class.
However, if there is none the image, the classifier
does not overly tend towards predicting one. Note that
a random classifier would select person class around
20% of the time, following the dataset distribution in
the training set.
This problem is introduced by the PASCAL VOC
dataset, as there are far more person objects through-
out the dataset than others.
Table 3: The prediction of the classifier on images that were
predicted incorrectly. If there is a person present, the DQ-
SSTN has a high chance of focusing on it.
(%) pred. person pred. other
person present 39.37 60.63
person not present 11.15 88.85
4.4.2 Issues with Saliency Assumption
The way we changed the detection dataset into one
for classification depends on our saliency assump-
tion: We assume the object with the biggest bounding
box to be the most salient one, as described in Sec-
tion 4.1.1. In this section, we investigate how often
and to which extent this assumption is violated and
how this impacts the performance of the DQ-SSTN.
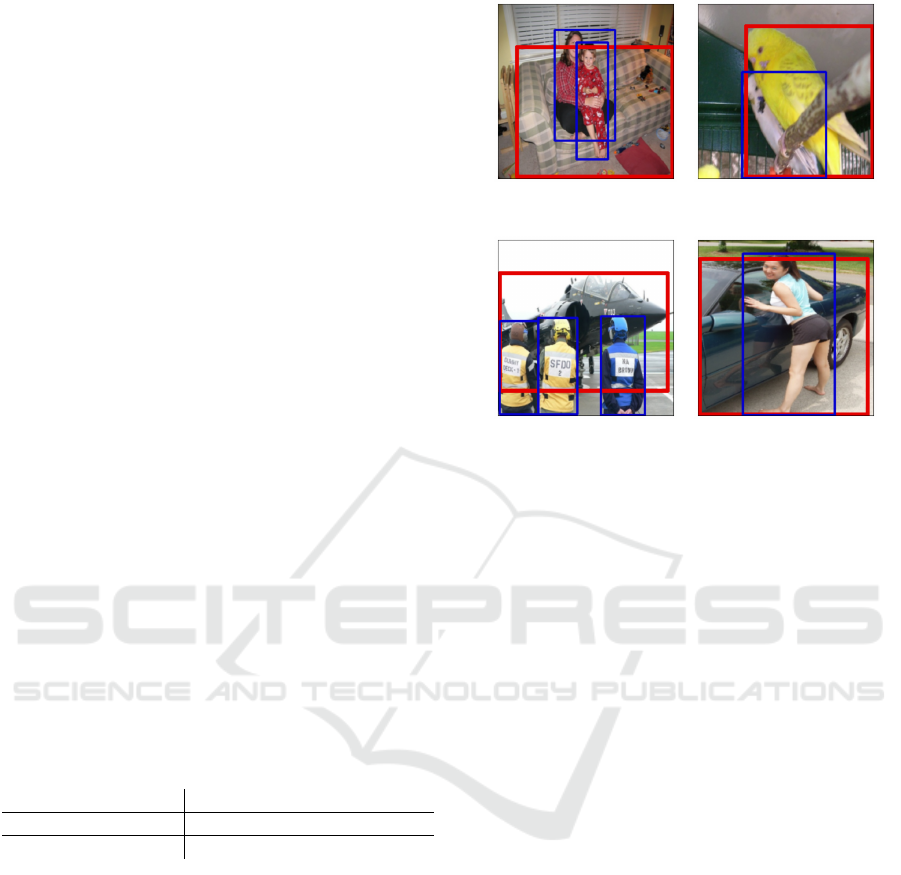
An example in contrast with our saliency assump-
tion is when a smaller object is located in front of a
bigger one. Consider a person sitting on a sofa (as
in Figure 5); in this scenario, humans consider the
person as the salient object, while based on our as-
sumption, the sofa is labeled as the salient category.
Interestingly, we observed that in most cases the clas-
30.88%
sofa
43.80%
bird
44.58%
aeroplane
54.27%
car
Figure 5: Visual examples where the main object intersects
with other objects. Red frames surround the largest ob-
ject, and blue frames the secondary ones. The value below
each image is the percentage of the largest (salient) object’s
bounding box that intersects with other bounding boxes and
the assigned true label is also given. The first image is an
image below threshold th = 0.4 but still considered clut-
tered, and the second one is vice versa. The other two ex-
amples further highlight our choice of threshold.
sifier also predicts the front object as the correct class
(person in this example), but this is considered a mis-
classification based on our evaluation.
To better understand this issue, we visualize the
overlap characteristics of our data in Figure 6. In this
figure, we see the portion of images in which the main
object (largest/salient) is not overlapping with other
objects in the scene, as well as the number of im-
ages in which the main object intersects with other
object instances considering different overlap thresh-
olds. For example, the column with th = 0.5 shows
the number of images in which the overlap between
the main and the secondary objects is lower or higher
than 50% of the main object area.
We observed that 41.35% of the images only have
one object and 10.76% of all images are accompanied
by secondary objects, but their bounding boxes do not
intersect with each other. This means that in 52.12%
of the images, our assumption about saliency strictly
holds. However, in 47.88% of the images, the salient
object is to some extent intersecting with (and pos-
sibly being occluded by) another object. Looking at
some qualitative examples (Figure 5), we consider a
threshold of th = 0.4 as critical; i.e. all images that
have more than 40% of their bounding-box concealed
Sequential Spatial Transformer Networks for Salient Object Classification
333
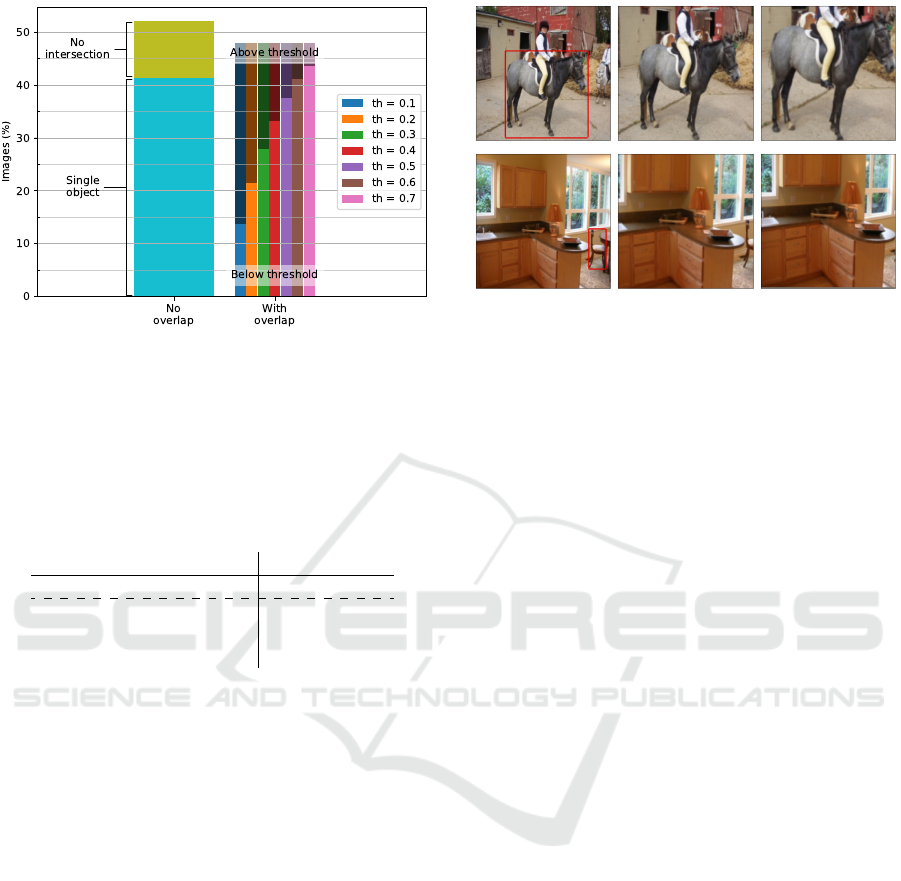
Figure 6: This histogram shows the composition of our
dataset regarding the relation between the most salient ob-
ject and overlapping objects. Depending on the selected
threshold, between 5%(th = 0.7) to 35%(th = 0.1) of all
images are to some extent covered by another object in-
stance, thus violating our assumption of saliency.
Table 4: DQ-SSTN classification accuracy on each subset
of PASCAL VOC when categorized based on the overlap
threshold of 0.4 (as shown in Figure 6).
Accuracy (%)
Total 81.86
No clutter 86.05
Cluttered, below th = 0.4 82.83
Cluttered, above th = 0.4 64.88
by another object do not follow our saliency assump-
tion based on object size. Based on this threshold,
about 15% of the dataset conflict with our saliency
assumption.
To investigate the impact of our saliency assump-
tion on the DQ-SSTN performance, we divide the
dataset into three categories; the images with the main
object not covered by any other objects and the im-
ages in which the main object is covered by other in-
stances more or less than 40% (th = 0.4 in Figure 6)
We evaluate our model separately on each group and
present the results in Table 4. As expected, we ob-
serve that the classification accuracy is significantly
lower for the data in which the salient object has an
overlap of over 40% with other objects in the scene.
5 CONCLUSION AND FUTURE
WORK
In this paper, we study the task of salient object clas-
sification. We introduce DQ-SSTN, a Sequential Spa-
tial Transformer Network based on Deep Q-Learning.
Our model learns to zoom on the salient object by it-
t = 0 (Start) t = 5 t = 10 (End)
Figure 7: Visual examples of our DQ-SSTN model grad-
ually focusing on the salient object. The bounding box of
the largest object is visualized in red in the starting frame
(t=0). The first row is an example of the DQ-SSTN work-
ing as expected. The second row is a failing case, where the
DQ-SSTN cannot find the salient object and blindly zooms
in.
eratively selecting an affine transformation to increase
the IoU of the largest object in an image. We experi-
mentally demonstrate the effectiveness of our method
in improving the classification accuracy, especially
for smaller objects where we achieve an improvement
of 3.63 pp. Furthermore, we provide several abla-
tion studies to investigate the reason behind failure
scenarios. In future work, we plan to explore more
flexible solutions by considering all objects within an
image during training favoring a multi-labeling ap-
proach where the DQ-SSTN successively classifies
every object within the image. Moreover, we believe
working towards preparing a more dedicated dataset
free from class bias would benefit our work.
ACKNOWLEDGMENT
This work was supported by the TU Kaiserslautern
CS PhD scholarship program, the BMBF project
ExplAINN (01IS19074), and the NVIDIA AI Lab
(NVAIL) program.
REFERENCES
Azimi, F., Raue, F., Hees, J., and Dengel, A. (2019). A
reinforcement learning approach for sequential spa-
tial transformer networks. In Tetko, I. V., K
˚
urkov
´
a,
V., Karpov, P., and Theis, F., editors, Artificial Neural
Networks and Machine Learning – ICANN 2019: The-
oretical Neural Computation, pages 585–597, Cham.
Springer International Publishing.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
334

Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Dong, Q., Gong, S., and Zhu, X. (2017). Class rectifica-
tion hard mining for imbalanced deep learning. In
Proceedings of the IEEE International Conference on
Computer Vision, pages 1851–1860.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Min-
derer, M., Heigold, G., Gelly, S., Uszkoreit, J., and
Houlsby, N. (2020). An image is worth 16x16 words:
Transformers for image recognition at scale. CoRR,
abs/2010.11929.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. International journal of com-
puter vision, 88(2):303–338.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep
residual learning for image recognition. CoRR,
abs/1512.03385.
Hendrycks, D. and Dietterich, T. (2019). Benchmarking
neural network robustness to common corruptions and
perturbations. In International Conference on Learn-
ing Representations.
Huber, P. J. (1964). Robust Estimation of a Location Param-
eter. The Annals of Mathematical Statistics, 35(1):73
– 101.
Jaderberg, M., Simonyan, K., Zisserman, A., and
Kavukcuoglu, K. (2015). Spatial transformer net-
works. In Cortes, C., Lawrence, N., Lee, D.,
Sugiyama, M., and Garnett, R., editors, Advances in
Neural Information Processing Systems, volume 28.
Curran Associates, Inc.
Kingma, D. P. and Ba, J. (2015). Adam: A method for
stochastic optimization. In Bengio, Y. and LeCun,
Y., editors, 3rd International Conference on Learn-
ing Representations, ICLR 2015, San Diego, CA, USA,
May 7-9, 2015, Conference Track Proceedings.
Krizhevsky, A., Hinton, G., et al. (2009). Learning multiple
layers of features from tiny images.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Pereira, F., Burges, C. J. C., Bottou, L.,
and Weinberger, K. Q., editors, Advances in Neural
Information Processing Systems, volume 25. Curran
Associates, Inc.
Mnih, V., Heess, N., Graves, A., et al. (2014). Recurrent
models of visual attention. Advances in neural infor-
mation processing systems, 27.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M. A.
(2013). Playing atari with deep reinforcement learn-
ing. CoRR, abs/1312.5602.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., Graves, A., Riedmiller, M.,
Fidjeland, A. K., Ostrovski, G., et al. (2015). Human-
level control through deep reinforcement learning. na-
ture, 518(7540):529–533.
Paszke, A., Gross, S., Chintala, S., Chanan, G., Yang, E.,
DeVito, Z., Lin, Z., Desmaison, A., Antiga, L., and
Lerer, A. (2017). Automatic differentiation in pytorch.
In NIPS-W.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. Advances in neural information
processing systems, 28.
Selvaraju, R. R., Das, A., Vedantam, R., Cogswell, M.,
Parikh, D., and Batra, D. (2016). Grad-cam: Why
did you say that? arXiv preprint arXiv:1611.07450.
Shrivastava, A., Gupta, A., and Girshick, R. (2016). Train-
ing region-based object detectors with online hard ex-
ample mining. In Proceedings of the IEEE conference
on computer vision and pattern recognition, pages
761–769.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An introduction. MIT press.
Szegedy, C., Ioffe, S., Vanhoucke, V., and Alemi, A. A.
(2017). Inception-v4, inception-resnet and the impact
of residual connections on learning. In Thirty-first
AAAI conference on artificial intelligence.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. Advances in neural
information processing systems, 30.
Xie, S., Girshick, R., Doll
´
ar, P., Tu, Z., and He, K. (2017).
Aggregated residual transformations for deep neural
networks. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 1492–
1500.
Zhou, B., Khosla, A., Lapedriza, A., Oliva, A., and Tor-
ralba, A. (2016). Learning deep features for discrim-
inative localization. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2921–2929.
Sequential Spatial Transformer Networks for Salient Object Classification
335
