
The MindSpaces Knowledge Graph: Applied Logic and Semantics on
Indoor and Urban Adaptive Design
Evangelos A. Stathopoulos
1 a
, Alexandros Vassiliades
1,2 b
, Sotiris Diplaris
1 c
,
Stefanos Vrochidis
1 d
, Nick Bassiliades
2 e
and Ioannis Kompatsiaris
1 f
1
Information Technologies Institute, Center for Research and Technology Hellas, Thessaloniki, Greece
2
School of Informatics, Aristotle University of Thessaloniki, Greece
Keywords:
Knowledge Graph, Ontology, Reasoning Mechanism, Indoor/Urban Adaptive Design, Semantic Web.
Abstract:
The evolution of Knowledge Graphs (KGs), during the last two decades, has encouraged developers to create
more and more context related KGs. This advance is extremely important because Artificial Intelligence (AI)
applications can access open domain specific information in a semantically rich, machine understandable for-
mat. In this paper, we present the MindSpaces KG, a KG that can represent emotions-relevant and functional
design for the indoor and urban adaptive design. The MindSpaces KG can integrate emotional, physiologi-
cal, visual, and textual measurements, for the development of online adapting environments. Moreover, we
present a reasoning mechanism that extracts crucial knowledge from the MindSpaces KG, which can help
users in real-life scenarios. The scenarios were provided by experts.
1 INTRODUCTION
The evolution of Knowledge Graphs (KGs) in the last
20 years allowed developers to construct context re-
lated KGs (i.e., KGs that can be used only in specific
environments). The creation of context related KGs
seems to be the next step for allowing KGs to be-
come the main knowledge representation format for
the Web (Berners-Lee et al., 2001). Our focus is on
representing emotions-relevant and functional design
for the indoor and urban adaptive design. Emotions-
relevant refer to emotions created to individuals when
experiencing an indoor or urban area, such as stress,
calmness, happiness, among others. The functional
design of an indoor or urban location imply the practi-
cality of the location, for example movability of work-
ers in a workspace in the case of indoor environments,
or redesign-relocate of a non helpful bus station in the
case of urban environments.
The MindSpaces KG was developed in or-
der to work as the knowledge representation of
a
https://orcid.org/0000-0003-3713-5833
b
https://orcid.org/0000-0003-4569-503X
c
https://orcid.org/0000-0002-9969-6436
d
https://orcid.org/0000-0002-2505-9178
e
https://orcid.org/0000-0001-6035-1038
f
https://orcid.org/0000-0001-6447-9020
the MindSpaces project
1
. The motivation for the
MindSpaces KG stands in 2 different key points. The
first is to improve urban design in a rapidly expanding
city by addressing new challenges that may arise re-
lated to its functionality, mobility attractiveness, pro-
tection of culture and environment. MindSpaces KG
will increase sensitivity and awareness towards the
cultural significance and current issues of a city, re-
lated to the environment and mobility. While the
second, is to increase opportunities for positive so-
cial interaction in work environments which leads to
improved productivity and creativity across depart-
ments and teams, by helping to readjust workspaces
to achieve better aesthetics and functionality.
The MindSpaces KG is mostly oriented for
artists, designers and architects for redesigning indoor
workspaces in order for the workers to feel more com-
fortable, and to improve functionality, mobility and
overall attractiveness of areas. But other users can
also utilize the MindSpaces KG, as for instance the
ideas of citizens of a city can be very useful in re-
designing urban areas. Moreover, we provide a rea-
soning mechanism that aids users in real-life scenar-
ios which were provided by experts.
The problem we are addressing is the construc-
tion of a general KG, which can represent emotions-
1
https://mindspaces.eu/
334
Stathopoulos, E., Vassiliades, A., Diplaris, S., Vrochidis, S., Bassiliades, N. and Kompatsiaris, I.
The MindSpaces Knowledge Graph: Applied Logic and Semantics on Indoor and Urban Adaptive Design.
DOI: 10.5220/0011666600003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 334-341
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

relevant and functional design for indoor and urban
adaptive design, by mapping emotional, physiologi-
cal, visual, and textual measurements. Moreover, we
address the fact that a user in order to access the in-
formation inside the KG in a convenient way, must be
provided with a reasoning mechanism based on real-
life scenarios. The real-life scenarios ideally should
be formulated by domain experts.
The scalability of the MindSpaces KG is wide, as
it can represent information for any urban area and
indoor workspace. More specifically, for the indoor
workspaces the MindSpaces KG is mostly oriented
for offices, but also other indoor workspaces, such as a
cottage industry, and can also exploit the information
inside the MindSpaces KG. A natural extension of it
could be to extend representing emotions relevant to
outdoor workspaces, and recommend tasks to citizens
on how they can increase the functionality, mobility,
and attractiveness of an urban area with respect to the
cultural significance and environment.
The problem tackled with this semantic frame-
work has to do with the different nature of data
present in the system. Several approaches can be
found that address the knowledge representation with
ontologies in each domain distinctly. The motivation
behind this work is that unique semantic requirements
needed to be addressed altogether and combine inter-
disciplinary domains in one unique ontology, tied to-
gether carefully with precise and meaningful custom
interconnections to serve multimodal knowledge rep-
resentation and enable smart reasoning mechanisms.
Our contribution with this paper, is on one hand
the MindSpaces KG which can represent multi-modal
measurements, which in turn help artists with the em-
pirical and pragmatic perception of actual occupants,
so as to drive the development of unconventional so-
lutions in the design of spaces. On the other hand,
is the reasoning mechanism for the MindSpaces KG,
which proves to be helpful in real-life scenarios.
The rest of this paper is organized as follows. Sec-
tion 2, contains the related work. Next, in Section 3
we present the MindSpaces KG, the reasoning mech-
anism, and the data upon we constructed the KG. Sec-
tion 4, contains the evaluation of the KG and the rea-
soning mechanism. We conclude our paper with Sec-
tion 5.
2 RELATED WORK
The study has two main directions, the MindSpaces
KG, and the reasoning mechanism which extracts
knowledge from the MindSpaces KG. For this reason,
we will separate our related work into two main sub-
sections, one for similar knowledge graphs, and one
for the domain specific reasoning mechanisms from
knowledge graphs.
Knowledge Graphs: The first category of knowl-
edge graphs that can be considered close to the
MindSpaces KG, are KGs for arts and artists. These
KGs fall into the category of KGs for cultural her-
itage (Hyv
¨
onen, 2012; Schneider, 2020). Moreover,
the area of KGs about arts and artists is not so rich,
as there are not many studies that could be classified
clearly in this domain. One exception, is the study of
Raven et al. (Raven et al., 2020), where the authors
present a KG that can represent the steps of specifica-
tion, conceptualization, integration, implementation
and evaluation in a case study concerning ceramic-
glass. The difference with MindSpaces KG, can be
noticed, as we offer a KG focused on the knowl-
edge representation of emotions-relevant and func-
tional design for the indoor and urban adaptive de-
sign.
Thereinafter, the area of KGs for architecture and
architects seems to be quite richer. (Lopes, 2007),
showcases the main notions that must be represented
in a KG about architectural concepts. On the other
hand, KGs like (Wagner and R
¨
uppel, 2019; Kumar
et al., 2019), which are considered in the area of ar-
chitecture mostly contain information about materials
of objects and their uses. For the former, we noticed
it is a theoretical study, while we offer a constructed
KG. For the latter three KGs, our KG does not contain
similar type of information, as we offer knowledge
about different interdisciplinary distinct domains.
Reasoning: The area of reasoning over KGs, is
quite rich and it was enhanced in the last decade with
the constant evolution of KGs. The reason why KGs
are very helpful in retrieving information, is because
they have a predefined format, which is easily under-
standable by the machine, and their terminology and
assertion components can be defined based on a set of
rules which can represent commonsense knowledge.
Even though many general techniques have been pre-
sented (Munir and Anjum, 2018; Asim et al., 2019;
Yu, 2019), there is lack of studies for reasoning over
KGs restricted to a specific domain. The reason why
is hard to create a reasoning mechanism over KGs
which are restricted to a specific domain, is because
domain experts are needed in order to create real-life
scenarios, based on which the reasoning mechanism
should be constructed (as mentioned in (Chi et al.,
2019)). (Vassiliades et al., 2020) is an exception as a
reasoning mechanism for the household environment
is presented, but in contrast to our study the scenarios
presented are not a result of knowledge provided by
domain experts.
The MindSpaces Knowledge Graph: Applied Logic and Semantics on Indoor and Urban Adaptive Design
335

3 THE MindSpaces KNOWLEDGE
GRAPH
The MindSpaces KG is part of the MindSpaces
project. Therefore, the MindSpaces KG communi-
cates with other components of the project. We men-
tion this because some parts of the mapping mech-
anism, which receives messages, in JSON format,
from the visual, textual, and stress analysis compo-
nent will not be analyzed in detail in this paper. But
the source code of the mapping mechanism can be
found here
2
. The idea of the pipeline is that after the
mapping mechanism has received the message from a
component, it will map the information into the KG.
Then, any user can hand-pick from a set of predefined
SPARQL queries, in order to access the information
in the KG. Notice that all SPARQL queries were de-
fined with the help of domain experts, and some of
them also require an image as an input in order to cast
the SPARQL query. Figure 1, shows an outline of the
pipeline, each number in the circles shows the order
of steps.
Figure 1: Pipeline of the MindSpaces KG.
3.1 Nature of Data
The multi-modality and variety of data flowing in the
system and the necessity of homogenization and fu-
sion mandated the adoption of a semantic knowledge
graph to address the requirements of the project. The
knowledge graph is not responsible for archiving and
storing raw data files, since there is an underlying
data storage facility for that purpose. Instead, the KG
hosts metadata of raw data, analyses results and mis-
cellaneous information with semantic value among
other candidates for being mapped and fused into the
knowledge base. One can find a blueprint of the mes-
sages fused in the KG here
2
. The KG is accompanied
with novel ontological models to achieve proper se-
mantic annotation of the raw data.
The main categories of data which needed to be
captured in the knowledge graph were: physiological
analysis results from galvanic skin responses (GSR),
2
https://github.com/valexande/MindSpacesPUC1-2
visual analysis results from images, textual analysis
results derived from online retrieved content, and gen-
eral information about VR experiments. Some of the
aforementioned analyses results share some common
relations such as in the case of the imageability met-
ric.
The physiological signals (GSR) were captured
during hot-spot or navigation VR experiments where
multiple users conducted stress-induced tasks inside
virtual environments containing multiple configura-
tions of work offices. The ultimate goal was to obtain
and assess stress indicators directly from the skin of
the subjects while experiencing different setups of the
space.
The visual analysis component consists of several
machine learning models either trained from scratch
or fine-tuned from other efforts. The model perform-
ing semantic segmentation (Qiu et al., 2021) on im-
ages was trained to extract semantic labels and per-
centages per pixel on images while the Verge clas-
sifier (Andreadis et al., 2020) was deployed to clas-
sify the images to one or more classes based on con-
text. The valence-arousal model for exterior design
was trained on a newly collected dataset annotated by
experts to deliver confidence and values on a happy-
unhappy and calm-excited scale, while a visual im-
ageability score is generated (Pistola et al., 2022).
3.2 The MindSpaces Knowledge Graph
The MindSpaces KG is separated into two big sub
graphs. One for the purpose of representing knowl-
edge that aims at improving urban design in a rapidly
expanding city by addressing new challenges that
may arise related to its functionality, mobility, attrac-
tiveness, protection of culture and environment. The
other aims at representing knowledge that involves in-
creasing opportunities for positive social interaction
in work environments which leads to improved pro-
ductivity and creativity across departments and teams,
by helping to readjust workspaces to achieve better
aesthetics and functionality.
The subgraph for the first case was constructed
based on the information we received from the var-
ious components. In more detail, we analysed the
messages that we received from the textual and vi-
sual analysis components, and we developed a KG
based on those. In the corresponding part of the on-
tology we represent the important concepts of these
messages through classes and relations among them.
Moreover, we analysed the requirements of the rea-
soning mechanism, meaning that we took into consid-
eration the competency questions given by users and
experts, and defined classes and relations in such a
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
336
way that would help the reasoning mechanism return-
ing the crucial information. Notice that a competency
question, is a question which as a user we would like
to be answered by the KG, with the information that
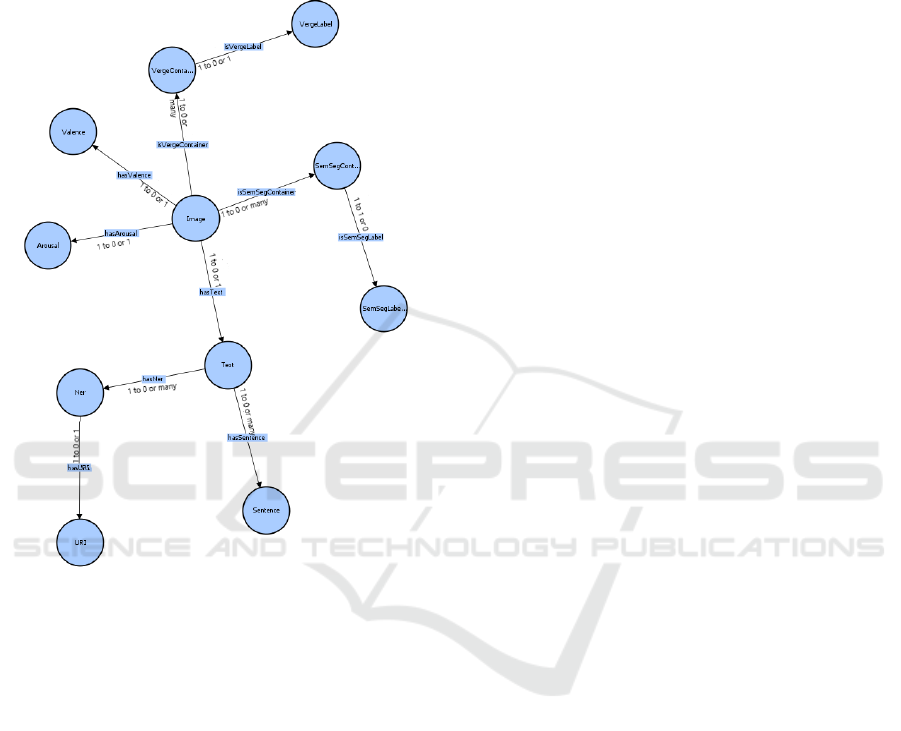
it contains. In Figure 2 one can see the classes and the
object type properties of the first subgraph.
Figure 2: The schema of the first subgraph of the
MindSpaces KG.
The namespace mind1 is used to indicate the
classes and relations for the first subgraph of the
MindSpaces KG. Next, we will give a detailed analy-
sis of the classes and the relations between them.
• The Sentence class contains information about
the sentences that compose a textual description
of an image. For each sentence it has informa-
tion about the emotional tag that was given by the
user, and the confidence of each emotional tag.
The emotional tag is the sentiment label that was
given by the user to a sentence, such as positive,
negative, and neutral.
• The Text class contains information about the tex-
tual description of an image. The Text class is
connected through the property hasSentence with
the class Sentence, in order to give further infor-
mation about the sentences that compose the tex-
tual description. Moreover, it has information for
the language of the textual description, and the
textual description itself. Finally, the Text class
is connected through the property hasNer with the
Ner class, which has information about named en-
tities found in the textual description. Named en-
tities can be words that refer to real life objects,
actions, or activities.
• The Ner class contains information about the
named entities found in the textual description of
an image. The Ner class gives information for
the category of the named entity relation (the cat-
egory of a named entity is a classification that
was given by the domain experts), the imageabil-
ity score of the named entity, and is connected
through the property hasURI with the class URI.
The imageability score is a confidence score that
is composed by the visual analysis component.
Imageability according to the urban planner Kevin
Lynch is the quality of a physical object to evoke
a strong image in any observer, thus being memo-
rable (Lynch et al., 1960).
• The URI class contains information about the
URIs of the named entities. Currently, the URIs
point only to DBpedia entities. The URI class has
information about the URI link and the confidence
that a named entity should be related with a spe-
cific URI.
• The VergeLabel class contains information about
the labels of the verge classifications found in an
image.
• The VergeContainer class contains information
about the imageability scores of the verge classi-
fications found in an image. Moreover, it is con-
nected though the property isVergeLabel with the
class VergeLabel, in order to indicate the label of
a verge classification.
• The SemSegLabel class contains information
about the labels of the segmented objects found
in an image.
• The SemSegContainer class contains informa-
tion about the imageability scores of the seg-
mented objects found in an image, the percent-
age of space they capture in the image, and the
confidence that they are part of the image. More-
over, it is connected though the property hasSem-
SegLabel with the class SemSegLabel, in order
to indicate the label of a segmented object.
• The Arousal class contains information about the
arousal score that was given by a user for an im-
age. Arousal is a confidence score given by the
users.
• TheValence class contains information about the
valence score that was given by the user for an
The MindSpaces Knowledge Graph: Applied Logic and Semantics on Indoor and Urban Adaptive Design
337
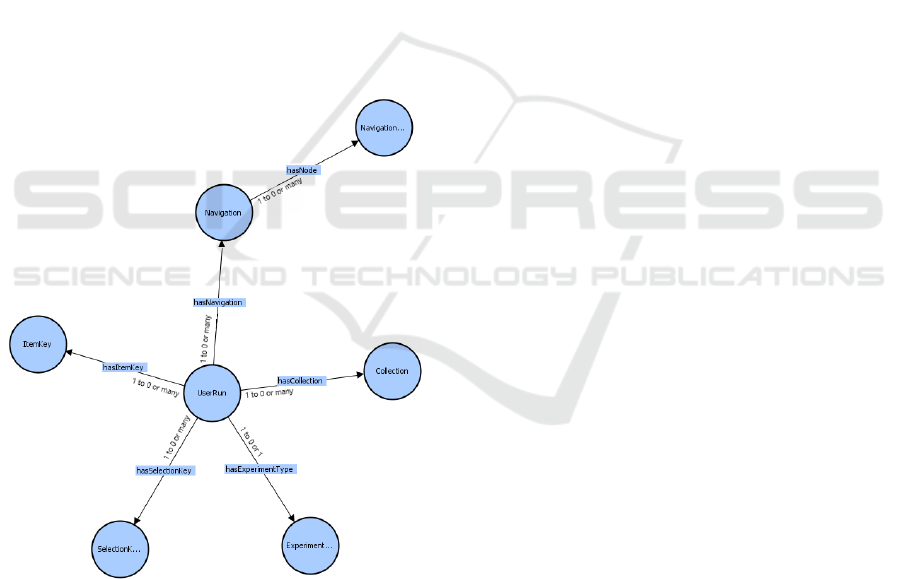
image. Valence is a confidence score given by the
users.
• The Image class is the most important class, as
it contains a lot of metadata information about
the characteristics of the image, such as the lati-
tude, longitude, the pitch, the zoom, and others.
But apart from these it is connected: (i) with the
Arousal class through the property hasArousal
to indicate its arousal, (ii) with the Valence
class through the property hasValence to indi-
cate its valence, (iii) with the VergeContainer
class through the property isVergeContainer to
give information about the verge classifications
that it has, (iv) with the SemSegContainer class
through the property isSemSegContainer to give
information about the segmented objects it con-
tains, and (v) with the Text class through the prop-
erty hasText to give information about the textual
description that it has.
In Figure 3 one can see the classes and the object
type properties of the second subgraph.
Figure 3: The schema of the second subgraph of the
MindSpaces KG.
The namespace mind2 is used for the second sub-
graph. Next, follows a detailed analysis of the classes
and the relations of the second subgraph.
• The Collection class contains information about
the experiment status data change, meaning that it
indicates when the user run has started, stopped,
and if it goes from state ON to state OFF.
• The ExperimentType class contains information
about the experiment type data changes, meaning
that it indicates if the experiment type is a naviga-
tion task, a navigation selection, hot spot experi-
ment, or it does not have a type.
• The Navigation class contains information about
the navigation configuration, meaning that it con-
tains information about the type of the config-
uration, and the timestamp that the node was
captured. Moreover, it is related through the
property hasNode with the class NavigationNode
that contains information about the navigation in-
stances (i.e., navigation nodes).
• The NavigationNode class contains information
about the navigation nodes, such as the x, y, z co-
ordinates of the node, the fusion score, and the
GSR score. The fusion and the GSR score, are
some confidence score given by the visual and
stress level analysis components.
• The ItemKey class contains information about
the item key information, such as item key label,
the collaboration, focus work, overall design, pri-
vacy, and stress scores for each item key. All of
the aforementioned scores, are some confidence
scores given by the users.
• Finally, the UserRun class is the most impor-
tant class, as it connects the information from the
aforementioned classes with a user run. More
specifically the UserRun class is connected: (i)
with the ExperimentType class through the prop-
erty hasExperimentType to indicate the experi-
ment types that it contains, (ii) with the ItemKey
class through the property hasItemKey to indi-
cate the item keys that it contains, (iii) with the
Collection class through the property hasCollec-
tion to give information about the collections that
it contains, and (iv) with the Navigation class
through the property hasNavigation to give infor-
mation for navigation nodes that it contains.
Notice that the two subgraphs eventhough they re-
fer to different notions, i.e., the first subgraph is for
the outdoor adaptive design and the second for the
redesign of internal workspaces, they are related be-
tween them with the property hasImage. The prop-
erty hasImage has domain the class Collection and
range the class Image. The reason for that is because
a collection is a set of images.
3.3 Reasoning and Logic
The reasoning mechanisms take advantage of the
MindSpaces KG which was created to support the use
cases of urban environments and indoor workspaces,
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
338

as well as of the population of the knowledge base
with content and metadata deriving from both artists
and users.
The main idea, for the reasoning over the first sub-
graph (see subsection 3.2), was to feed on demand an
interactive google map with geolocated 2D points in
the form of CSV files corresponding to image entries
inside the knowledge base through application pro-
gramming interfaces (APIs) developed in node.js and
Javascript. The graphdh.js library was used to estab-
lish the connection and transactions towards and from
the GraphDB repository
3
with authorization and au-
thentication ensured. The file delivered in response
follows a scalable and dynamic approach, meaning it
is being generated on demand based on live requests,
thus ensuring always up-to-date data delivery as the
knowledge base supports a continuous online popula-
tion and new entries may arrive anytime. The format
of the file consists of as many lines as the images fulfil
the SPARQL queries and 5 columns:
• latitude (the latitude when the corresponding im-
age was captured)
• longitude (the longitude when the corresponding
image was captured)
• point size (the size of the circle to be depicted on
the map)
• point opacity (the opacity of the circle to be de-
picted on the map)
• point colour (the colour of the circle to be depicted
on the map)
In total, 16 SPARQL queries were formulated,
each satisfying a different user requirement, followed
by an additional multipurpose sparse function. But
due to space restrictions only two Scenario A and
Scenario B, which were defined by domain experts
as real-life scenarios, will be analyzed.
Scenario A: Given a snap image, return a list of
images, where: (i) the Top 3 segmentation labels of
the snap (based on the coverage percentage) exist in
the images, (ii) the images must have imageability ≥
imageability of snap + 0.05, (iii) the Top 3 segmen-
tation labels must exist in the images with the same
coverage percentage, or a 20% difference, and (iv) the
results must be limited to 8 images, if there exists as
many, sorted based on their imageability.
Scenario B: Given a snap image, return a list of
images, where: (i) the Top 3 segmentation labels of
the snap (based on the colorfulness percentage) ex-
ist in the images, and their colorfulness is above 1,
and (ii) for each one of the 3 segmentation classes
3
http://160.40.52.169:6161
bring the Top 5 images with the highest colorfulness
for each segmentation classes.
Notice that the queries which are refered in this
subsection are also Competency Questions (CQs), ex-
cept from Scenario A and Scenario B which are a
combination of CQs.
4 EVALUATION
The evaluation of the MindSpaces KG was twofold.
On the one hand, we evaluated the consistency and
completeness of the MindSpaces KG; we did this
with two different evaluation methods. Firstly, we
evaluated the completeness of the MindSpaces KG,
by defining a set of CQs that the KG must be able
to answer with the information it contains (subsec-
tion 4.1). Secondly, we evaluated the consistency of
the MindSpaces KG by testing if it obeys a set of
SHACL constrains (subsection 4.1). On the other
hand, the evaluation of the reasoning mechanism
was performed by computing the precision-recall-F1
scores used for reasoning systems (subsection 4.2).
4.1 Competence and Consistency of the
Knowledge Graph
The completeness of the MindSpaces KG was evalu-
ated through a set of CQs assembled during the for-
mation of the official ontology requirements speci-
fication document (ORSD) (Su
´
arez-Figueroa et al.,
2009). For this reason, before constructing the
MindSpaces KG, we asked from users to define
a set of questions that they would like from the
MindSpaces KG to contain as knowledge and be able
to answer. The users were architects from the School
of Architects of the Aristotle University of Thessa-
loniki
4
, either undergraduate-master students or pro-
fessors, and architects or designers from Zaha Hadid
Architects
5
. In total a number of 83 CQs was col-
lected, the complete list of CQs can be found here
2
.
Based on the fact that we constructed the
MindSpaces KG on the aforementioned set of CQs,
this means that if any of the CQ is translated into
a SPARQL counterpart, our KG would answer the
question with the information it contains. For this
reason, we translated each CQ into a SPARQL coun-
terpart and we expected to return the desired infor-
mation. The completeness of the MindSpaces KG
was found adequate, as each CQ when translated into
4
https://www.auth.gr/school/arch/
5
https://www.zaha-hadid.com/
The MindSpaces Knowledge Graph: Applied Logic and Semantics on Indoor and Urban Adaptive Design
339
a SPARQL counterpart returned the desired informa-
tion.
Additionally to the CQs, we performed a valida-
tion procedure in order to inspect the syntactic and
structural quality of the metadata in the KB and to
check the consistency of them. The consistency of
the MindSpaces KG was found adequate, as out of 12
SHACL rules, from which 4 referred to object type
properties and 8 to data type properties, none of them
returned any invalidation of the rule. Moreover, we
checked if instances exist which belong to intersec-
tion of classes, as we did not desire such a case, and
there were not any.
4.2 Knowledge Retrieval Metrics
The evaluation of the reasoning mechanism was con-
ducted using the precision, recall and F1-score used
for reasoning systems (Equations 1, 2 and 3), over the
two real-life scenarios presented in 3.3 (i.e., Scenario
A and Scenario B).
precision =
|{RelevantInstance} ∩ {RetrievedInstance}|
|{RetrievedInstance}|
(1)
recall =
|{RelevantInstance} ∩ {RetrievedInstance}|
|{RelevantInstance}|
(2)
F1 = 2 ∗
recall ∗ precision
recall + precision
(3)
Retrieved Instances are considered all the images
for which the reasoning mechanism, did not return an
error when we casted a question to retrieve informa-
tion for them.
Relevant Instances are considered all the images
for which the reasoning mechanism, managed to re-
turn some information, when we casted a question to
retrieve information for them.
We denote by Retrieved
A
, Retrieved
B
the number
of retrieved images for Scenario A and Scenario B,
respectively. Relevant
A
, Relevant
B
are the numbers
of relevant images for Scenario A and Scenario B, re-
spectively. Next, precision
A
, precision
B
are the pre-
cision scores for Scenario A and Scenario B, recall
A
,
recall
B
are the recall scores for Scenario A and Sce-
nario B, and F1
A
, F1
B
are the F1 scores for Scenario
A and Scenario B, respectively.
The dataset on which we evaluated our reasoning
mechanism contains a set of 1200 images, and can be
found here
2
. All images were considered Retrieved,
meaning our reasoning mechanism did not return any
error. Thus, Retrieved
A
= Retrieved
B
= 1200. The
same does not hold for the relevant images, for both
scenarios, as for Scenario A the Relevant
A
images
were 1157, and for Scenario B the Relevant
B
images
were 1142.
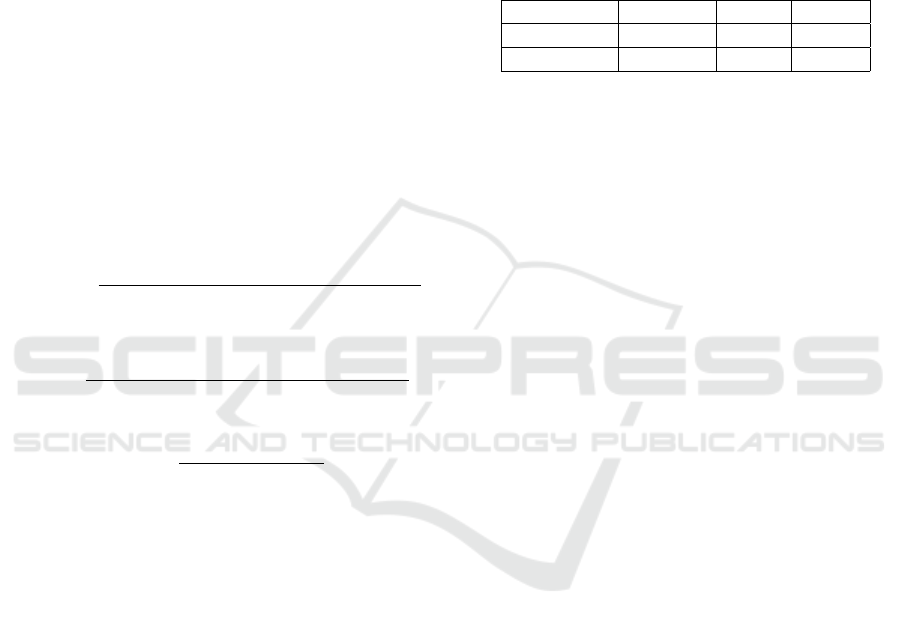
Based on the aforementioned numbers the preci-
sion, recall and F1-scores for both scenarios can be
found in Table 1. Notice, the results are rounded to
four decimals.
Table 1: Precision, recall and F1-scores for Scenario A and
Scenario B.
Precision Recall F1
Scenario A 0.9649 1.0 0.9821
Scenario B 0.9632 1.0 0.9812
5 DISCUSSION & CONCLUSION
In this paper, we presented the MindSpaces KG,
a KG for representing emotions-relevant and func-
tional design for indoor and urban adaptive design.
The MindSpaces KG is populated with emotional,
physiological, visual, and textual measurements, for
the development of adapting environments. It is
mostly oriented for artists, designers and architects,
and its purpose on one hand is for redesigning indoor
workspaces for the workers to feel more comfortable,
and on the other hand to improve functionality, mo-
bility, attractiveness of spaces by taking into respect
the cultural heritage and environment. But other users
can also utilize the MindSpaces KG, for instance the
ideas of citizens of a city can be very useful in re-
designing urban areas. Moreover, the MindSpaces
KG offers a reasoning mechanism to access the infor-
mation in the KG in a convenient way. For this reason,
it retrieves helpful information for real-life scenarios.
The scenarios that were used to develop the reasoning
mechanism, were provided by experts.
The final step was to evaluate the completeness,
the consistency and the reasoning mechanism of the
MindSpaces KG. The completeness of the KG (Sec-
tion 4.1) was evaluated with CQs, which were col-
lected by domain experts. Then, we translated each
CQ into a SPARQL counterpart, and checked each
one’s results, proving that our KG is able to provide
information to all users. The consistency of the KG
(Sections 4.1) was evaluated with a set of custom con-
straint rules created and enforced upon the KG where
no violation warnings were detected.
The high F1 scores achieved both for Scenario A
(98.21%) and Scenario B (98.12%), show that it can
be used as an individual mechanism for helping users,
by providing insightful information. Additionally, for
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
340

the relevant instances that were missed, both for Sce-
nario A and Scenario B, we can comment that this
happened because these two scenarios require an im-
age as an input, which is analyzed and the Top-3 seg-
mented labels (i.e., Top-3 object labels that are most
likely contained in the image) are considered in order
to find similar images from the KG (see subsection
3.3). Therefore, the missed relevant images contained
Top-3 segmented labels which did not exist in any im-
age in our KG simultaneously.
As for future work, our plan is to enrich the
MindSpaces KG with domain-knowledge from rele-
vant Semantic Web KGs, such as ConceptNet (Speer
et al., 2017) and WordNet (Fellbaum, 2010), and
compare the knowledge in the MindSpaces KG with
other existing KG related to the indoor and urban
adaptive design. Moreover, we will investigate and
expand the quantity of real-life scenarios that the rea-
soning mechanism can support. Finally, we also plan
to create a more friendly user interface, as at the mo-
ment the queries are formulated through SPARQL.
ACKNOWLEDGEMENTS
This work has been supported by the EC-funded
project MindSpaces (H2020-825079)
REFERENCES
Andreadis, S., Moumtzidou, A., Apostolidis, K., Gkoun-
takos, K., Galanopoulos, D., Michail, E., Gialam-
poukidis, I., Vrochidis, S., Mezaris, V., and Kompat-
siaris, I. (2020). Verge in vbs 2020. In International
Conference on Multimedia Modeling, pages 778–783.
Springer.
Asim, M. N., Wasim, M., Khan, M. U. G., Mahmood, N.,
and Mahmood, W. (2019). The use of ontology in
retrieval: a study on textual, multilingual, and multi-
media retrieval. IEEE Access, 7:21662–21686.
Berners-Lee, T., Hendler, J., and Lassila, O. (2001). The
semantic web. Scientific american, 284(5):34–43.
Chi, N.-W., Jin, Y.-H., and Hsieh, S.-H. (2019). Developing
base domain ontology from a reference collection to
aid information retrieval. Automation in Construction,
100:180–189.
Fellbaum, C. (2010). Wordnet. In Theory and applications
of ontology: computer applications, pages 231–243.
Springer.
Hyv
¨
onen, E. (2012). Publishing and using cultural heritage
linked data on the semantic web. Synthesis lectures on
the semantic web: theory and technology, 2(1):1–159.
Kumar, V. R. S., Khamis, A., Fiorini, S., Carbonera, J. L.,
Alarcos, A. O., Habib, M., Goncalves, P., Li, H., and
Olszewska, J. I. (2019). Ontologies for industry 4.0.
The Knowledge Engineering Review, 34.
Lopes, D. M. (2007). Shikinen sengu and the ontology of
architecture in japan. The Journal of aesthetics and
art criticism, 65(1):77–84.
Lynch, K. et al. (1960). The image of the city (vol. 11).
Munir, K. and Anjum, M. S. (2018). The use of ontolo-
gies for effective knowledge modelling and informa-
tion retrieval. Applied Computing and Informatics,
14(2):116–126.
Pistola, T., Georgakopoulou, N., Shvets, A., Chatzis-
tavros, K., Xefteris, V.-R., Garc
´
ıa, A. T., Koulalis, I.,
Diplaris, S., Wanner, L., Vrochidis, S., et al. (2022).
Imageability-based multi-modal analysis of urban en-
vironments for architects and artists. In International
Conference on Image Analysis and Processing, pages
198–209. Springer.
Qiu, W., Li, W., Liu, X., and Huang, X. (2021). Subjective
street scene perceptions for shanghai with large-scale
application of computer vision and machine learning.
Technical report, EasyChair.
Raven, D., de Boer, V., Esmeijer, E., and Oomen, J. (2020).
Modeling ontologies for individual artists. Vrije Uni-
versiteit Amsterdam.
Schneider, A. (2020). Alternatives: World ontologies and
dialogues between contemporary arts and anthropolo-
gies. In Alternative Art and Anthropology, pages 1–
26. Routledge.
Speer, R., Chin, J., and Havasi, C. (2017). Conceptnet 5.5:
An open multilingual graph of general knowledge. In
Thirty-first AAAI conference on artificial intelligence.
Su
´
arez-Figueroa, M. C., G
´
omez-P
´
erez, A., and Villaz
´
on-
Terrazas, B. (2009). How to write and use the
ontology requirements specification document. In
OTM Confederated International Conferences” On
the Move to Meaningful Internet Systems”, pages
966–982. Springer.
Vassiliades, A., Bassiliades, N., Gouidis, F., and Patkos, T.
(2020). A knowledge retrieval framework for house-
hold objects and actions with external knowledge. In
International Conference on Semantic Systems, pages
36–52. Springer, Cham.
Wagner, A. and R
¨
uppel, U. (2019). Bpo: The building
product ontology for assembled products. In Proceed-
ings of the 7th Linked Data in Architecture and Con-
struction workshop (LDAC 2019)’, Lisbon, Portugal,
page 12.
Yu, B. (2019). Research on information retrieval model
based on ontology. EURASIP Journal on Wireless
Communications and Networking, 2019(1):1–8.
The MindSpaces Knowledge Graph: Applied Logic and Semantics on Indoor and Urban Adaptive Design
341
