
Proposal of a Signal Control Method Using Deep Reinforcement
Learning with Pedestrian Traffic Flow
Akimasa Murata, Yuichi Sei
a
, Yasuyuki Tahara
b
and Akihiko Ohsuga
c
The University of Electro Communications, Tokyo, Japan
Keywords:
Agents, Deep Reinforcement Learning, Traffic Control.
Abstract:
In dealing with traffic control problems, there have been studies on learning signal change patterns and timing
by using reinforcement learning for signals. In most of them, the focus is on improving the delay time of
vehicles, and few of them assume the traffic situation including pedestrians. Therefore, the objective of this
study is to provide traffic control to reduce traffic delays for both vehicles and pedestrians in an environment
where pedestrian traffic volume varies greatly. Then, we will verify the accuracy with traffic signals consider-
ing the temporal changes of the environment. Results of verification, although vehicle wait times increased, a
significant reduction in pedestrian wait times was observed.
1 INTRODUCTION
In the modern traffic environment, vehicles and
pedestrians are mixed, and traffic control is achieved
by using traffic signals appropriate to the environ-
ment. In response to this, research is being conducted
to create traffic signals that can respond to real-time
traffic changes by learning signal control policies us-
ing DQN (Deep Q-Network)(Mnih et al., 2013) , one
of the reinforcement learning methods. Most of those
studies focus on vehicles, but in the real environment,
we need to pay attention to exceptional factors such
as pedestrians. Information on the size of pedestrian
groups and their destinations is an important factor
in understanding the traffic environment and under-
standing of human flow should lead to appropriate
traffic control. Therefore, this study focuses on pedes-
trian control and aims to develop a traffic control sys-
tem that can respond to changes in the environment.
Then, by creating traffic signals with a network with
LSTM (Long Short-Term memory) (Hochreiter and
Schmidhuber, 1997), (Gers et al., 2000) added. This
attempt to control for the large differences in speed
between vehicles and pedestrians, as well as the dif-
ferences in where they are moving on the road. In
this way, we verify the feasibility and the system
of control based on temporal changes in traffic vol-
a
https://orcid.org/0000-0002-2552-6717
b
https://orcid.org/0000-0002-1939-4455
c
https://orcid.org/0000-0001-6717-7028
ume. Traffic signals that are controlled using the cur-
rent traffic environment are referred to as DTC (DQN
Traffic Control signal), while traffic signals that are
controlled using past traffic conditions are referred to
as LTC (LSTM Traffic Control signal). Traffic sig-
nals were created using deep reinforcement learning,
and their accuracy was evaluated using DTC for traf-
fic signals that are controlled based on the current en-
vironment and LTC for traffic signals that are con-
trolled using past information on the environment. As
a result of a comparison with FTC (Fixed Traffic Con-
trol signal), which switches signals in sequence, DTC
reduces waiting time per vehicle by about 74% and
increase waiting time per pedestrian by about 196%,
DTC reduced overall vehicle and pedestrian waiting
time by approximately 12%, and it can be concluded
that DTC is able to control the environment accord-
ing to the conditions of the environment. LTC was
not learning to control well because it increased ve-
hicle and pedestrian wait times. However, even in
environments with large numbers of pedestrians, the
waiting time per person did not increase significantly.
This paper is organized as follows. Section 2 intro-
duces related research. Section 3 describes the pro-
posed method. Section 4 describes the experiment,
the evaluation and its discussion. Finally Section 5
summarizes the conclusions of this paper.
Murata, A., Sei, Y., Tahara, Y. and Ohsuga, A.
Proposal of a Signal Control Method Using Deep Reinforcement Learning with Pedestrian Traffic Flow.
DOI: 10.5220/0011665000003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 319-325
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
319
2 RELATED WORKS
2.1 DQN
Q-learning is one of the reinforcement learning meth-
ods. It is a learning method that uses a table called
a Q-table to determine the value of an action in each
situation. Based on the Q-value on the Q-table, the
value of an action in each state is determined, and the
next action is selected accordingly. The Q value is up-
dated for each action based on the value of the action
in each state and the value of the subsequent actions.
However, the creation of a Q-table for estimating Q-
values becomes more complicated as the number of
states and actions increases. DQN takes in a neural
network in the estimation of this Q-value and is capa-
ble of stable and accurate estimation.
2.2 R2D2
DRQN (Deep Recurrent Q-Learning) (Hausknecht
and Stone, 2017) is a learning method that combines
LSTM, a model that enables learning of long-term de-
pendencies on time series data, and DQN. However,
this learning method is incompatible with experience
replay of DQN, and there was a problem that the hid-
den state of LSTM was initialized. R2D2 (Recur-
rent Experience Replay in Distributed Reinforcement
Learning) (Kapturowski et al., 2019) is a method that
solves this problem. During the simulation, hidden
state of LSTM is saved with the experience saved,
such as the state of the environment and the agent’s
rewards. The network is then updated during train-
ing. By allowing time to pass through only time-
series data without learning for a certain period, this
method enables hidden state to be close to the state
when experience is saved.
2.3 Traffic Control Studies
Most of the studies on traffic control using traffic sig-
nals trained by reinforcement learning have been con-
ducted using traffic simulators. The Simulation of
Urban Mobility (SUMO) (Behrisch et al., 2018) is
the main simulator used. The method used in traf-
fic control is to learn to use traffic signals as agents
by using tensors obtained from the presence or ab-
sence of vehicles in the traffic network (Vidali, 2017),
(Liang et al., 2018). By passing the obtained tensor
representing the traffic condition to the neural net-
work, an action is selected. The value of the action
is determined according to the change of the state by
the action, and the network is updated by using it. In
addition, a cooperative system that updates Q-values
by transferring Q-values of adjacent traffic lights to a
multi-agent system (Ge et al., 2019) and a study intro-
ducing LSTM have also been conducted(Choe et al.,
2018).
3 METHOD
3.1 Overview
In this study, we consider signal control in an envi-
ronment where vehicles and pedestrians are present
on the road and their traffic volume varies greatly.
SUMO is used to create an environment in which the
traffic volume changes, from which the traffic condi-
tion of the environment is obtained. Deep reinforce-
ment learning is performed based on the results. In
the traffic simulation, the durations of green and yel-
low lights are fixed, and the total time is set to k. In
this study, the value of k is 20 seconds on the simula-
tor. Traffic light acquires traffic conditions (location
information of vehicles and pedestrians), selects ac-
tions, and calculates rewards of reinforcement learn-
ing at each time k. In the following description, the
value that increases with each time k is defined as step
t, and the list of obtained values is shown in Table 1.
Table 1: Symbol list.
Symbol Expression
s
t
State of the environment at step t
w
t
Waiting time between step t − 1 and step t
r
t
Reward between step t − 1 and step t
a
t
Selected action at step t
M Experiential memory
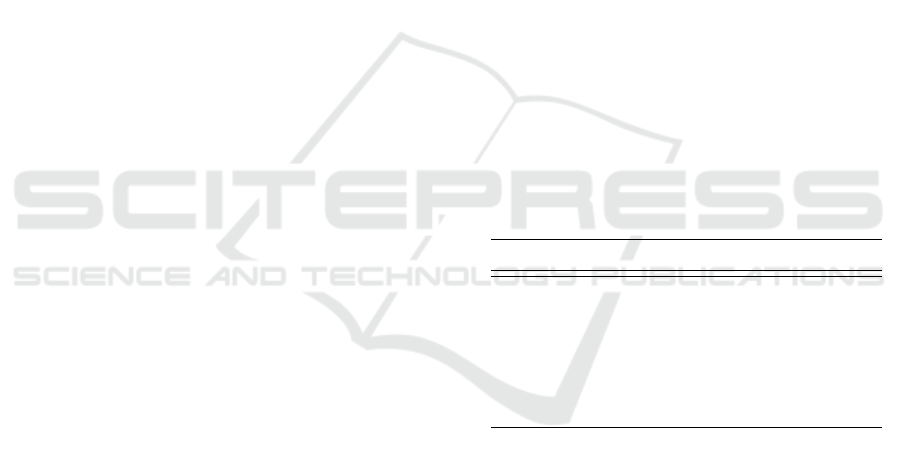
3.2 State Representation
The traffic light acquires information on the location
of vehicles and pedestrians in the environment every
time k. Then, the road in the vicinity of the signal
is divided into segments of a predetermined distance.
The state of the environment is represented by cre-
ating a list according to the number of vehicles and
pedestrians moving or stopped within the segmented
area. In addition, the number of pedestrians present
in the pedestrian crossing at the intersection is added
to the list. This is to treat pedestrians in crosswalks as
information to determine whether a vehicle can turn
right or left. The environment state list s
t
at step
t is represented as s
t
={N
1
t
, N
2
t
,. . . ,N
104
t
}. This is a
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
320
list with 104 elements and the number of vehicles or
pedestrians in the road division range j with N
j
t
. The
vehicle division range is set to the same size as that of
the vehicle in the three-lane portion near the signal. In
the two-lane portion, the range is gradually expanded
to twice, three times, and four times the size of the
vehicle. The pedestrian division range is about half
that of a vehicle, and is more segmented than that of
a vehicle (Figure 1). This is because the size of each
pedestrian in the environment is smaller than that of
a vehicle, and the purpose is to clarify the density of
pedestrians within the segmented area.
Figure 1: Segmentation range.
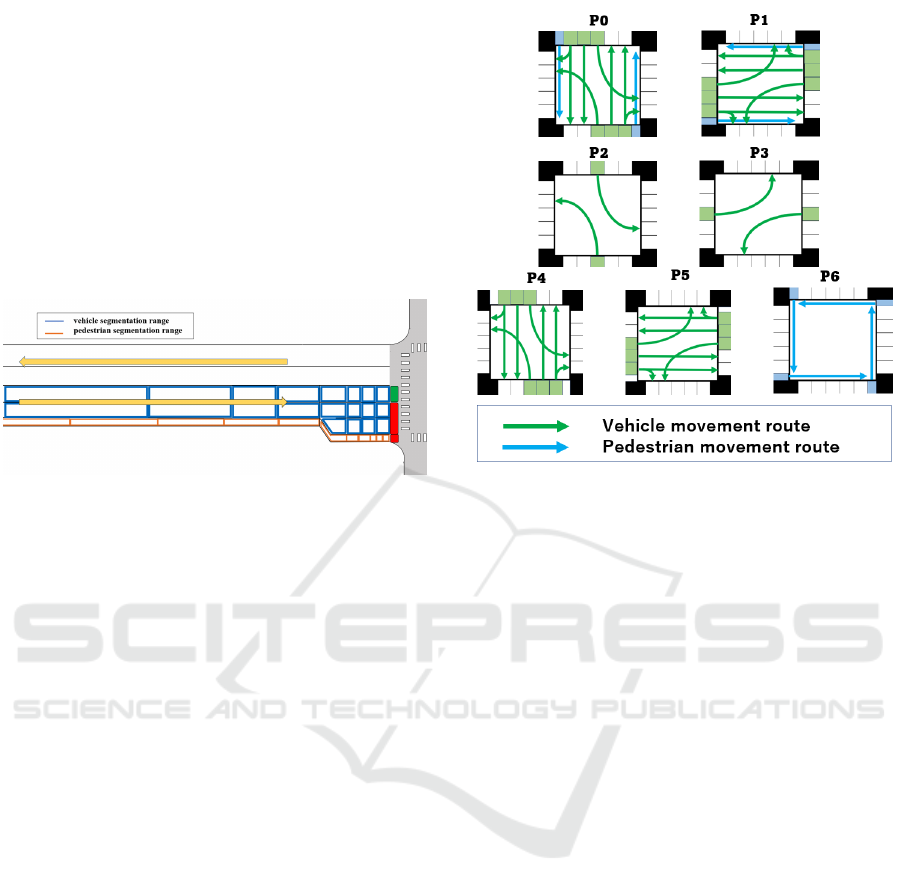
3.3 Action
The traffic light chooses its action using a state list ob-
tained from the environment at each time k. The ac-
tion is to maintain the current signal pattern or change
to one of the signal patterns shown in Figure 2. In
low traffic environments, simple control is possible
with only P
0
and P
1
. However, in an environment with
heavy pedestrian traffic, right and left turns by vehi-
cles are restricted, so P
2
and P
3
are set to allow for
this. In addition, P
4
, P
5
, and P
6
are provided for the
case of extremely heavy vehicle or pedestrian traffic.
3.4 Reward
The reward values in reinforcement learning are
mainly determined by the waiting time of vehicles and
pedestrians near intersections. The waiting time of
stopped vehicles and pedestrians is obtained for each
step t. Assuming that the vehicle waiting time at step
t is CW
t
and the pedestrian waiting time is PW
t
, the re-
ward function R
t
is expressed by the following equa-
tion 1
R
t
= (CW
t−1
−CW
t
)+α(PW
t−1
−PW
t
)−βEM
t
(1)
α is an arbitrary constant, and it’s set up to ad-
just for the importance of pedestrians in the environ-
ment. In this study, α is set to 3 because the environ-
ment used in the study is an environment with many
Figure 2: Signal pattern.
pedestrians. Also, EM
t
in equation is the count of the
number of emergency brakes the vehicle has caused
from the previous step to the current step. Emergency
braking may occur at the timing of a signal change or
when pedestrians are present in the crosswalk. The
emergency braking is considered to be the basis for
causing accidents and was established with the aim of
reducing the number of such accidents. β is a con-
stant that is negative, and the reward decreases as the
number of emergency brakes increases. In this study,
β is set to -5000. This value was determined based
on experiments with traffic signals that switch signals
in sequence. The results of this experiment showed a
very low value for the vehicle reward, so we set a very
high value compared to that value. This was expected
to promote the inhibition of emergency braking dur-
ing learning.
3.5 Network
The network used in this study consists of five fully
connected layers. In addition, in order to have traf-
fic control using temporal information, we prepared a
network including LSTM (Figure 3). This network is
the one in which the first layer of the aforementioned
network consisting only of fully connected layers is
changed to the LSTM layer. In this network, the input
is a tensor consisting of states over several steps, and
depending on the state of the environment, one of the
signal patterns shown in section 3.3 is obtained as an
output.
Proposal of a Signal Control Method Using Deep Reinforcement Learning with Pedestrian Traffic Flow
321
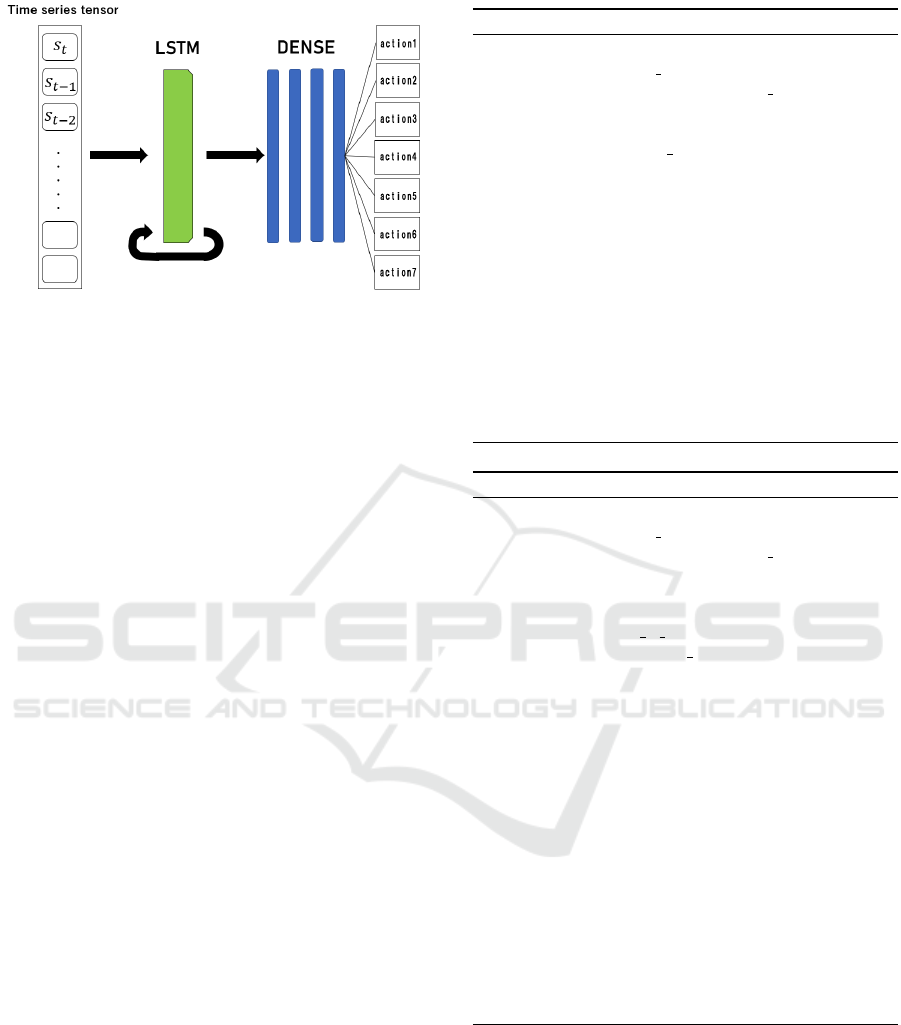
Figure 3: Overview of the network.
3.6 Algorithm
The learning algorithms Algorithm 1 and Algorithm 2
are as follows. Algorithm 1 shows the flow of learning
by DQN and is based on the algorithm published by
Andrea Vidali (Vidali, 2017). First, it runs the simula-
tion with SUMO. Second, it obtains a state by number
of vehicles and pedestrians in the environment. Third,
using the obtained state list, the signal selects the ac-
tion. Then, the algorithm calculates rewards based on
vehicle and pedestrian waiting time. Fourth, save the
acquired state and reward values to experience mem-
ory. Repeat this process for each step t. After a cer-
tain amount of time, the network is updated using the
saved experience. Experimential memory stores the
state of the environment and the value of rewards,
the maximum amount of storage is defined. There-
fore, if it is exceeded, the oldest data is deleted. The
reason for determining the maximum amount of stor-
age is that ε-greedy makes the older data highly ran-
dom. Algorithm 2 shows learning including LSTM.
In learning with this network, R2D2 (Kapturowski
et al., 2019) methods were incorporated. Stores the
hidden state of the LSTM layer at each step t in the ex-
perience and updates the network with it during learn-
ing. Also, do not use the time series tensor for a few
steps for training, but just pass it through the network.
This ensures that the hidden state of LSTM is close to
the state when the time series tensor is saved.
4 EXPERIMENT
4.1 Test Environment
In this study, we performed simulations using SUMO
and evaluated the accuracy of traffic signals. Simu-
lation was performed up to 100 episodes, with 4000
steps on SUMO as one episode. The environment
Algorithm 1: Learning Algorithm.
1: for episode = 1 to N do
2: while step < max step do
3: get tra f f ic states and waiting time: s
t
, w
t
4: estimate reward : r
t
5: update old ad jacent signal action
6: if len(M) > max size − 1 then
7: delete M[0]
8: end if
9: append experience = (s
t
, a
t−1
, r
t
, s
t−1
)
10: select action with ε−greedy : a
t
11: yellow phase and green phase
12: t = t + 1
13: update s
t−1
= s
t
, a
t−1
= a
t
14: end while
15: update target network
16: repeat training epochs do
17: get batch size experiences
18: update network parameters
19: end repeat
20: end for
Algorithm 2: Learning Algorithm using time series data
1: for episode = 1 to N do
2: while step < max step do
3: get tra f f ic states and waiting time: s
t
, w
t
4: estimate reward : r
t
5: get hidden state : h
t−2
6: que and pop time step states : ls
t
7: if ls
t
> (max ls size) − 1 then
8: if len(M) > max size − 1 then
9: delete M[0]
10: end if
11: append
12: experience = (ls
t−1
, a
t−1
, r
t
, ls
t
, h
t
)
13: select action with ε−greedy : a
t
14: else
15: select action randomly
16: end if
17: yellow phase and green phase
18: t = t + 1
19: update ls
t−1
= ls
t
, a
t−1
= a
t
20: end while
21: repeat training epochs do
22: get batch size experiences
23: burn in process
24: update network parameters
25: end repeat
26: end for
shown in Figure 4 was prepared for simulation and
learning. In this environment, vehicles and pedestri-
ans travel on separate roads and do not collide at any
point on the intersection except at crosswalks. Dur-
ing the simulation, the number of vehicles and pedes-
trians in an episode is determined at the stage where
an episode is executed. At each step, vehicles and
pedestrians are generated according to a certain prob-
ability and start moving to the destination determined
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
322

at the same time. Vehicles and pedestrians have their
generation probabilities changed at certain steps. The
purpose of this is to verify whether traffic signals are
capable of responding to changes in traffic volume by
establishing time periods during which traffic volume
varies greatly.
Figure 4: Simulation Environment.
4.2 Evaluation Experiment
4.2.1 Experimental Setup
To evaluate the performance of the trained traffic light
agents, simulations up to 100 episodes were con-
ducted. The evaluation was based on comparisons
of average vehicle and pedestrian waiting times. In
the experiment, traffic patterns with one point one
times, one point five times, and two times the num-
ber of pedestrians as compared to vehicles are pre-
pared, the traffic patterns are referred to as low-
density, medium-density, and high-density traffic en-
vironments, respectively, and are evaluated. The per-
formance was evaluated by comparing the learned
traffic lights, DTC (DQN Traffic Control signal) and
LTC (LSTM Traffic Control signal), with a traffic
light called FTC (Fixed Traffic Control signal). DTC
is a traffic light with a network of fully connected lay-
ers, and controls using the state of the intersection
for one step at the intersection. LTC is a traffic light
with a network including LSTM, and controls using
the state for several steps at the intersection. FTC is
a traffic light that switches color in a predetermined
order at regular intervals and provides stable control
regardless of the traffic environment. In this experi-
ment, its signal is switched between the north-south
pattern of P
0
, P
2
and the east-west pattern of P
1
, P
3
at
50 seconds intervals, as shown Section3.4.
4.2.2 Experimental Result
Table 2: Vehicle waiting time.
Method Low Medium High
×10
2
s ×10
2
s ×10
2
s
DTC 25.7 29.4 29.5
LTC 248.9 348.2 520.3
FTC 106.5 107.0 111.2
Table 3: Pedestrian waiting time.
Method Low Medium High
×10
2
s ×10
2
s ×10
2
s
DTC 99.0 161.5 266.6
LTC 44.3 63.2 98.0
FTC 37.6 53.7 81.4
Table 4: Waiting time per vehicle.
Method Low Medium High
s s s
DTC 6.60 7.59 7.62
LTC 64.4 89.8 134.0
FTC 27.44 27.67 28.74
Table 5: Waiting time per pedestrian.
Method Low Medium High
s s s
DTC 20.80 25.04 27.68
LTC 9.35 9.49 9.96
FTC 8.05 8.26 8.46
Tables 2 through 5 show the experimental results.
Tables 2 and 3 summarize the averaged cumulative
values of waiting time per episode for vehicles and
pedestrians. Table 4 shows the total amount of time
vehicles wait between episodes divided by the num-
ber of vehicles, which is the waiting time per vehicle
value. Table 5 shows the waiting time per pedestrian.
The waiting time represents the time on the simulator,
and the smaller the value is, the more appropriate the
traffic control is for the environment.
Proposal of a Signal Control Method Using Deep Reinforcement Learning with Pedestrian Traffic Flow
323

4.2.3 Discussion
In Tables 2 to 5, which are the experimental results,
we evaluate and discuss the accuracy of the learned
traffic signals. Table 2 shows that, compared to the
stable control of FTC, the learned traffic lights, DTC,
reduced waiting time for vehicle by about 74% and in-
creased vehicle waiting time for pedestrians by about
196%, respectively, on average at each density com-
pared to FTC. Based on the wait times on both sides,
DTC’s overall wait time total is up. However, Table
4 and Table 5 shows that, compared to FTC, DTC,
reduced the total waiting time of per vehicle and per
pedestrians by about 12%. This can be thought of
as a reduction in the amount of waiting time incurred
by vehicles and pedestrians in the transportation net-
work as a whole. Table 3 shows that for the two traffic
signals trained, the waiting time for LTC is shorter,
but Table 2 shows that the waiting time of vehicles
at LTC is significantly higher than that at DTC. This
is due to the fact that LTC has placed more empha-
sis on reducing pedestrian waiting time. From Sec-
tion3.4, the importance of the walker in the environ-
ment is adjusted by setting a constant α in the reward
function. This high value the pedestrian learns that
continuing to take actions that reduce the pedestrian’s
waiting time is a simple way to increase the value of
the reward. Therefore, it is necessary to design re-
wards that reduce waiting time for both pedestrians
and vehicles. It can also be inferred that the presence
of the prepared road environment was a factor that in-
creased the overall waiting time including vehicles.
Since the prepared environment is only a crossroad, it
can be said that it is easy to grasp the scale of vehicles
and pedestrians moving in the road. In such an envi-
ronment, it can be judged that DTC, which uses the
current state of the environment, is easier to perform
control that reflects the state of the environment. On
the other hand, LTC can lead to better control in com-
plex road environments where it is difficult to judge
traffic conditions on the spot. Tables 4 and 5 show that
DTC and FTC does not show a significant change in
waiting time per vehicle or per pedestrian with respect
to changes in traffic density. In contrast, the learned
traffic signals show a large change in vehicle wait-
ing times, but no noticeable difference in pedestrian
waiting times. This indicates that the learned traffic
signals work to reduce the waiting time for pedestri-
ans in response to changes in the traffic environment.
Therefore, it can be determined that the learned traffic
signals are superior in terms of control adapted to the
traffic environment.
5 CONCLUSION
The signal condition was verified by using a network
that uses the state of the environment between one
step and a network that uses the state of the environ-
ment between several steps. In this research, traffic
control is performed using traffic signals learned by
deep reinforcement learning in an environment with a
mixture of vehicles and pedestrians. As a result, DTC,
a learned traffic light, led to a reduction in the wait-
ing time experienced by each of the traffic network
as a whole. Furthermore, LTC was not possible to
reduce the waiting time of the entire traffic network,
but it was possible to reduce the pedestrian waiting
time by adapting to changes in traffic volume. In the
future, we will expand the learning and experimental
environment to create a traffic signal system that can
control traffic in a large-scale traffic network. In addi-
tion, we will improve the control of traffic signals us-
ing time series information. We will try to control ap-
propriately by increasing or decreasing the number of
states obtained from the environment and by adjusting
the past states used to select actions and adjusting the
past states used to select actions. On top of that, we
try to control not only simple structures such as cross-
roads, but also complex road environments by using
human flow, such as the size of pedestrian groups and
the direction of movement.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI Grant
Numbers JP21H03496, JP22K12157.
REFERENCES
Behrisch, M., Lopez, P. A., Bieker-Walz, L., Erdmann, J.,
Flotterrod, Y., Hilbrich, R., Lucken, L., Rummel, J.,
Wagner, P., and WieBner, E. (2018). Microscopic
Traffic Simulation using SUMO. IEEE Intelligent
Transportation Systems Conference (ITSC).
Choe, C., S.Back, Woon, B., and Kong, S. (2018). Deep
Q Learing with LSTM for Traffic Light Control.
2018 24th Asia-Pacific Conference on Communica-
tions(APCC).
Ge, H., Y.Song, Wu, C., Ren, J., and Tan, G. (2019). Co-
operative Deep Q-Learning With Q-Value Transfer for
Multi Intersection Signal Control. 2019 IEEE Access
2907618.
Gers, F. A., Schmidhuber, J., and Cummins, F. (2000).
Learning to forget: continual prediction with LSTM.
Neural Computation 12(10), 2451-2471.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
324

Hausknecht, M. and Stone, P. (2017). Deep Recur-
rent Q-Learning for Partially Observable MDPs.
arXiv:1507.06527v4.
Hochreiter, S. and Schmidhuber, J. (1997). LONG SHORT-
TERM MEMORY. Neural Computation 9(8): 1735-
1780.
Kapturowski, S., Ostrovsk, G., Quan, J., and Dabney, R.
M. W. (2019). Recurrent Experience Replay In Dis-
tributed Reinforcement Learning. ICLR 2019.
Liang, X., X.Du, and Han, Z. (2018). Deep rein-
forcement learning for traffic light control in
vehicular networks. IEEE Trans. Veh. Technol.:
https://arxiv.org/abs/1803.11115(2022/06/10 refer-
ence).
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, L., Wierstra, D., and Riedmiller, M.
(2013). Playing Atari with Deep Reinforcement
Learning. arXiv preprint arXiv:1312.5602.
Vidali, A. (2017). Simulation of a traffic light scenario
controlled by Deep Reinforcement Learning agent.
https://github.com/AndreaVidali/Deep-QLearning-
Agent-for-TrafficSignal-Control(2022/06/10 refer-
ence).
Proposal of a Signal Control Method Using Deep Reinforcement Learning with Pedestrian Traffic Flow
325
