
LSTM, ConvLSTM, MDN-RNN and GridLSTM Memory-based
Deep Reinforcement Learning
Fernando Fradique Duarte
1a
, Nuno Lau
2b
, Artur Pereira
2c
and Luís Paulo Reis
3d
1
Institute of Electronics and Informatics Engineering of Aveiro, University of Aveiro, Aveiro, Portugal
2
Department of Electronics, Telecommunications and Informatics, University of Aveiro, Aveiro, Portugal
3
Faculty of Engineering, Department of Informatics Engineering, University of Porto, Porto, Portugal
Keywords: Convolutional Long Short-Term Memory, Grid Long-Short Term Memory, Long Short-Term Memory,
Mixture Density Network, Reinforcement Learning.
Abstract: Memory-based Deep Reinforcement Learning has been shown to be a viable solution to successfully learn
control policies directly from high-dimensional sensory data in complex vision-based control tasks. At the
core of this success lies the Long Short-Term Memory or LSTM, a well-known type of Recurrent Neural
Network. More recent developments have introduced the ConvLSTM, a convolutional variant of the LSTM
and the MDN-RNN, a Mixture Density Network combined with an LSTM, as memory modules in the context
of Deep Reinforcement Learning. The defining characteristic of the ConvLSTM is its ability to preserve
spatial information, which may prove to be a crucial factor when dealing with vision-based control tasks while
the MDN-RNN can act as a predictive memory eschewing the need to explicitly plan ahead. Also of interest
to this work is the GridLSTM, a network of LSTM cells arranged in a multidimensional grid. The objective
of this paper is therefore to perform a comparative study of several memory modules, based on the LSTM,
ConvLSTM, MDN-RNN and GridLSTM in the scope of Deep Reinforcement Learning, and more specifically
as the memory modules of the agent. All experiments were validated using the Atari 2600 videogame
benchmark.
1 INTRODUCTION
Memory-based Deep Reinforcement Learning has
been shown to be a viable solution to successfully
learn control policies directly from high-dimensional
sensory data in complex vision-based control tasks
such as videogames (Hausknecht & Stone, 2015;
Heess et al., 2015; Sorokin et al., 2015; Tang et al.,
2020). At the core of this success lies the Long Short-
Term Memory (LSTM) (Hochreiter & Schmidhuber,
1997), a very popular Recurrent Neural Network
(RNN), featuring a specialized architecture designed
to overcome the error backflow problems present in
other RNN designs.
Recent developments have introduced the
Convolutional LSTM (ConvLSTM) (Shi et al., 2015),
a convolutional variant of the LSTM, and the Mixture
a
https://orcid.org/0000-0002-9503-9084
b
https://orcid.org/0000-0003-0513-158X
c
https://orcid.org/0000-0002-7099-1247
d
https://orcid.org/0000-0002-4709-1718
Density Network (MDN) (Bishop, 1994) combined
with an LSTM (MDN-RNN) (Ha & Schmidhuber,
2018) as memory modules in the context of Deep
Reinforcement Learning (DRL). See (Mott et al.,
2019) and (Ha & Schmidhuber, 2018) for examples
of such work.
The defining characteristic of the ConvLSTM is
its ability to preserve spatial information, which may
prove to be a crucial factor when dealing with vision-
based control tasks. The MDN-RNN on the other
hand can be used as a predictive memory (i.e., to
derive a probability distribution of the future),
endowing the agent with the ability to act
instinctively on these predictions of the future without
the need to explicitly plan ahead.
Also of interest to this work is the GridLSTM
(Kalchbrenner et al., 2016), a network of LSTM cells
Duarte, F., Lau, N., Pereira, A. and Reis, L.
LSTM, ConvLSTM, MDN-RNN and GridLSTM Memory-based Deep Reinforcement Learning.
DOI: 10.5220/0011664900003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 2, pages 169-179
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
169

arranged in a multidimensional grid which aims to
further generalize the advantages of LSTMs to the
realm of Deep Neural Networks (DNNs). The focus
of this work is therefore to perform a comparative
study of several memory modules in the context of
DRL and more specifically as the memory modules
of the agent. The four memory modules tested are
based on the LSTM, the ConvLSTM, the MDN-RNN
and the GridLSTM. More concretely, this work aims
to answer the following questions:
Q1: Can the learning process be improved by
preserving the spatial information inside the
memory module of the agent, when solving
vision-based control tasks directly from high-
dimensional sensory data (e.g., raw pixels)?
Q2: What are the advantages or disadvantages
of using a contextual memory (e.g., LSTM) as
opposed to a predictive one (e.g., MDN-RNN)?
Q3: Do different memory modules play
significantly different roles concerning the
decision making of the trained agent?
Q4: Can the learning process be improved by
using separate memory sub-modules in parallel
(e.g., GridLSTM) to process different
information?
The visualization technique proposed in
(Greydanus et al., 2018) was used to derive further
insight about the different policies learned by the
different memory modules tested. Also, it should be
noted that this work does not address external
memory-based DRL such as in (Graves et al., 2014)
and (Wayne et al., 2018). Finally, the Atari 2600
videogame benchmark was the testbed used to
validate all the experiments. The remainder of the
paper is structured as follows: section 2 presents the
related work, including a brief overview of the
technical background, section 3 discusses the
experimental setup, which includes the presentation
of the methods proposed and the training setup,
section 4 presents the experiments carried out and
discusses the results obtained and finally section 5
presents the conclusions.
2 RELATED WORK
This section presents a brief overview of the related
work and technical background pertinent to this work.
2.1 Memory-based DRL
Many control problems must be solved in partially
observable environments. Most videogames fall into
this category. In the context of Reinforcement
Learning (RL), partial observability means that the
full state of the environment cannot be entirely
observed by an external sensor (e.g., the agent playing
the game). The problem of partial observability arises
frequently in vision-based control tasks, due to for
example, occlusions or the lack of proper information
about the velocities of objects (Heess et al., 2015).
One possible way to address this issue is to
maintain a ‘sufficient’ history of past observations,
which completely describes the current state of the
environment. Deep Q-Network (DQN) (Mnih et al.,
2015) used the last k=4 past observations. The main
drawback of this technique is its heavy reliance on the
value of k, which is task dependent and may be
difficult to derive (Hausknecht & Stone, 2015).
Another possibility is to use RNNs (e.g., LSTM), to
compress this ‘sufficient’ history.
RNNs are well suited to work with sequences and
can act as a form of memory of past observations. The
advantages of this solution are twofold. On one hand
k is no longer necessary, since now the agent only
needs access to the current state of the environment at
each time step t. On the other hand, the agent can now
dynamically learn and determine what a ‘sufficient’
history is accordingly to the needs of the task, which
may entail for example, keeping a compressed history
spanning more than k past observations. Examples of
this work include (Hausknecht & Stone, 2015; Heess
et al., 2015; Sorokin et al., 2015; Tang et al., 2020).
2.2 LSTM and Convolutional LSTM
The LSTM (Hochreiter & Schmidhuber, 1997) was
introduced to solve the error backflow problems
present in other RNN designs. Before the introduction
of the LSTM, RNNs were very unstable and hard to
train, particularly when dealing with longer
sequences (the error signals would either vanish or
blow-up during the optimization process). Since its
introduction the LSTM has gained widespread
popularity in many domains of application such as
speech recognition (Graves et al., 2013), machine
translation (Sutskever et al., 2014) and video
sequence representation (Srivastava et al., 2015).
Equation (1) below, presents the formulation of
the LSTM as implemented in Pytorch (Paszke et al.,
2019), where x
t
, h
t
and c
t
are the input, hidden state
and the cell state at time t, respectively (h
t-1
is the
hidden state at time t-1) and i
t
, f
t
and o
t
are the input,
forget and output gates. W* are the weights and b* the
biases, σ is the sigmoid function and ⊗ represents the
Hadamard product.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
170

i
t
= σ(W
ii
x
t
+ b
ii
+ W
hi
h
t
-1
+ b
hi
)
(1)
f
t
= σ(W
i
f
x
t
+ b
i
f
+ W
h
f
h
t
-1
+ b
h
f
)
g
t
= tanh(W
i
g
x
t
+ b
i
g
+ W
h
g
h
t
-1
+ b
h
g
)
o
t
= σ(W
io
x
t
+ b
io
+ W
ho
h
t
-1
+ b
ho
)
c
t
=
f
t
⊗ c
t
-1
+ i
t
⊗
g
t
h
t
= o
t
⊗ tanh(c
t
)
However, LSTMs do not preserve spatial
information, which may be important in vision-based
tasks. The ConvLSTM (Shi et al., 2015) was
proposed to address this issue. The original
formulation of the ConvLSTM follows the one
proposed in the Peephole LSTM (Graves, 2013)
variant and is presented below in Equation (2).
It should be noted however, that in the case of the
ConvLSTM all the involved tensors are 3D, namely,
the x
t
inputs, the h
t
hidden states, the c
t
cell states and
the i
t
, f
t
and o
t
gates. An example of this work can be
found in (Mott et al., 2019) where the authors used a
ConvLSTM in their vision core to implement an
attention-augmented RL agent.
i
t
= σ(W
x
i
x
t
+ W
hi
h
t
-1
+ W
ci
⊗ c
t
-1
+ b
i
)
f
t
= σ(W
xf
x
t
+ W
h
f
h
t
-1
+ W
c
f
⊗ c
t
-1
+ b
f
)
c
t
=
f
t
⊗ c
t
-1
+ i
t
⊗tanh(W
x
c
x
t
+ W
hc
h
t
-1
+ b
c
)
(2)
o
t
= σ(W
x
o
x
t
+ W
ho
h
t
-1
+ W
co
⊗ c
t
+ b
o
)
h
t
=o
t
⊗ tanh(c
t
)
2.3 GridLSTM
Similarly to RNNs, DNNs can suffer from the
vanishing gradient problem when applied to longer
sequences. Also, in a DNN, layers have no inbuilt
mechanisms to dynamically select or ignore parts or
the whole of their inputs. The GridLSTM
(Kalchbrenner et al., 2016) was proposed to address
these issues, further generalizing the advantages of
LSTMs to the realm of DNNs.
At a high level, a GridLSTM is a neural network
that is arranged in a grid with one or more
dimensions. Layers communicate with each other
directly through LSTM cells which can be placed
along any (or all) of these dimensions. Among other
things, the GridLSTM also proposes an efficient N-
way communication mechanism across the LSTM
cells, allows dimensions to be prioritized as well as
non-LSTM dimensions and promotes more compact
models by allowing the weights to be shared among
all the dimensions (referred to as a Tied N-LSTM).
2.4 MDN-RNN
The MDN (Bishop, 1994) combines a neural network
with a mixture density model and can in principle
represent arbitrary conditional probability
distributions. More formally, given an output y and an
input x, and modeling the generator of the data y
∈
Y
as a mixture model (e.g., Gaussian Mixture Model),
the probability density of the target data can be
represented as in Equation (3) below. The parameters
α
i
(x), referred to as the mixing components, can be
regarded as prior probabilities (i.e., each α
i
(x)
represents the prior probability of the target y having
been generated from the ith component of the
mixture) and the functions ϕ
i
(y|x) represent the
conditional density of the target y for the ith kernel.
𝑝
𝑦
|
𝑥) = 𝛼
𝑥
)
𝜙
𝑦
|
𝑥)
(3
)
The work in (Ha & Schmidhuber, 2018) combined
an MDN with an LSTM, referred to as MDN-RNN,
to derive a predictive memory of the future
P(z
t+1
|z
t
, a
t
, h
t
), where z
t
, a
t
and h
t
are the latent vector
encoded by the convolutional network, the action
performed and the hidden state of the RNN at time
step t respectively, which the agent can query in order
to act without the need to plan ahead.
The present work leverages all of the work
presented in this section to perform a comparative
study over all these techniques in the context of
memory-based DRL.
3 EXPERIMENTAL SETUP
This section presents the experimental setup used,
including the presentation of the memory modules
proposed and the training setup.
3.1 Baseline Agent
At a high level, the baseline architecture used to
compose the agents comprises three main modules,
namely: the encoder, the memory and the policy. At
each time step t, the encoder receives a single image
o
t
, representing the current state of the game and
encodes it into a set of feature maps z
t
. Based on z
t
and the hidden state of the memory module at the
previous time step h
t-1
, the policy chooses an action a
t
and acts on the environment. Finally, z
t
, a
t
and h
t-1
are
passed to the memory module, which in turn
computes the next hidden state h
t
, see Figure 1.
While this architecture is common to all the agents
tested, the internal details of the memory module
differ and shall be addressed when appropriate. As for
the encoder, the only difference is that all the LSTM-
LSTM, ConvLSTM, MDN-RNN and GridLSTM Memory-based Deep Reinforcement Learning
171

based agents use l=5 convolutional layers whereas all
the ConvLSTM-based agents use only l=4. In both
cases the encoders are configured in a similar way.
The policy module is common to all the agents.
Figure 1: Baseline architecture of the agents, depicting the
information flow. The three main modules, encoder,
memory and policy are highlighted in dashed boxes.
More concretely, and regarding the baseline
agent, referred henceforth as LSTM, the encoder is
composed of l=5 convolutional layers configured
with (1, 32, 64, 64, 64) input channels, (32, 64, 64,
64, 64) output channels, kernel sizes (8, 4, 4, 4, 4),
strides (4, 2, 2, 1, 1) and no padding, respectively.
Each layer is followed by batch normalization (Ioffe
& Szegedy, 2015) and a Rectified Linear Unit
(ReLU) nonlinearity. The memory module in turn is
composed by an LSTM with size 256 (the Pytorch
implementation was used).
Finally, the policy comprises a linear layer
(denoted as FC in the figure) with size 128 followed
by layer normalization (Ba et al., 2016) and a ReLU
nonlinearity, which feeds into two other linear layers,
the actor and the critic, responsible for choosing the
actions and computing the value of the state,
respectively.
3.2 ConvLSTM-based Agent
The encoder used by this agent, referred to as
ConvLSTM, uses l=4 convolutional layers. The
reasons to use l=4 as opposed to l=5 are twofold: 1)
some quick empirical tests seemed to indicate that the
ConvLSTM performed better with l=4 and 2) using
l=4 allowed the number of parameters of both the
LSTM and the ConvLSTM-based agents to be almost
identical (with the exception of the MDN-RNN case),
thus excluding this (i.e., the number of parameters) as
a possible explanatory factor when comparing the
agents performance wise.
Finally, the memory module comprises a
ConvLSTM with size 64x8x5 (i.e., a volume with 64
channels of height 8 and width 5). The
implementation used is similar to Equation (1), the
main differences being that: 1) all the inputs, outputs
and gates are 3D and 2) x
t
and h
t-1
are concatenated,
not added together. It should be noted that in all the
agents tested, except the 2-GridLSTM agent,
x
t
= (z
t
, a
t
), that is, x
t
is derived by concatenating z
t
and a
t
. Also note that Equation (1) was used in favour
of Equation (2) mainly due to its greater simplicity.
As a final note, both the MDN-RNN and the
GridLSTM-based memory modules, presented next,
were implemented using the ConvLSTM. The two
main reasons for this were: 1) the ConvLSTM has
been less explored in the literature when compared to
the LSTM and 2) because the ConvLSTM preserves
spatial information, which may allow visualization
techniques such as the one proposed in (Greydanus et
al., 2018) to be used to try to get better insights
regarding the role of memory in the decision making
of the trained agent. However, in the case of the
GridLSTM, yet a different approach uses both an
LSTM and a ConvLSTM in parallel.
3.3 MDN-RNN-based Agent
This agent, henceforth referred to as MDN-RNN, uses
an l=4 encoder, for the reasons already mentioned.
Also, similarly to the ConvLSTM agent, the memory
module comprises a ConvLSTM with size 64.
Excluding the fact that the memory module is based
on the ConvLSTM, the implementation of the MDN-
RNN follows the one proposed in (Ha &
Schmidhuber, 2018) and (Bishop, 1994).
3.4 GridLSTM-based Agents
Two different memory modules were tested in this
category. The memory module of the first agent,
referred to as GridLSTM, was composed by adapting
the implementation of the GridLSTM to work with a
vanilla ConvLSTM, similar to the one used in the
ConvLSTM agent. The memory module of the second
agent implemented, referred to as 2-GridLSTM, on
the other hand, exploits the fact that different
information is being passed to memory.
As already mentioned and depicted in Figure 1
and also of interest to the following discussion, the
memory module receives z
t
and a
t
as inputs at each
time step t. On top of representing two different
pieces of information, the format of these two inputs
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
172

is also different (3D and 1D respectively). This in turn
opens the opportunity to process each piece of
information separately (and in parallel) using a
memory sub-module suited to their format. This is the
purpose of the 2-GridLSTM agent.
Contrary to all other agents, where z
t
is flattened
and concatenated with a
t
, the memory module of the
2-GridLSTM agent processes z
t
and a
t
separately and
in parallel using a ConvLSTM (size 64) and an LSTM
(size 64) respectively. In Figure 1, h
t-1
= (h
i
t-1
,h
j
t-1
),
where the first memory component h
i
t-1
corresponds
to the hidden state of the ConvLSTM and the second
memory component h
j
t-1
corresponds to the hidden
state of the LSTM. The ConvLSTM preserves the
spatial information contained in z
t
whereas a
t
(one-hot
encoded in this case) can be processed by an LSTM
since it does not hold any spatial information. More
specifically, this flow of information occurs over the
depth dimension.
As a final note, the GridLSTM agent uses shared
weights across dimensions. Also, the depth
dimension is prioritized in both agents. Finally, both
agents use an l=4 encoder similar to the one used by
the ConvLSTM agent.
3.5 Training Setup
In terms of pre-processing steps, the input image at
each time step t is converted to grayscale and cropped
to 206 by 158 pixels to better fit the encoder used. No
rescaling is performed. All agents are trained for a
minimum of 16,800,000 frames, which can be
extended until all current episodes are concluded,
similarly to what is proposed in (Machado et al.,
2018). In this context an episode is a set of m lives.
A total of eight training environments were used
in parallel to train the agent using the Advantage
Actor-Critic (A2C) algorithm, a synchronous version
of the Asynchronous Advantage Actor-Critic (A3C)
(Mnih et al., 2016). Adam (Kingma & Ba, 2015) was
used as the optimizer. The learning rate is fixed and
set to 1e-4. The loss was computed using Generalized
Advantage Estimation with λ=1.0 (Schulman et al.,
2016).
In terms of the remaining hyperparameters used,
an entropy factor was added to the policy loss with a
scaling factor of 1e-2, the critic loss was also scaled
by a factor of 0.5, rewards were clipped in the range
[-1, 1] and a discount factor of γ=.99 was used. No
gradient clipping was performed. Concerning frame
skipping, this is in-built in OpenAI Gym (Brockman
et al., 2016) (i.e., at each step t OpenAI Gym will skip
between two to four frames randomly).
Finally, at the beginning of training the internal
state of the memory component is set to an empty
state (i.e., all zeros) representing the state of no
previous knowledge. and is never reset to zero during
the remainder of the training procedure (e.g., at the
end of each episode or life).
It should also be noted that during training (i.e.,
backpropagation) the gradient flow from the memory
module to the encoder is cut. This is done to ensure
that the memory module only manages information as
opposed to also participate in its optimization. This
compartmentalization allows the scrutiny of the
responsibility of the memory module as a standalone
factor concerning the decision making of the trained
agent. The number of trainable parameters for each of
the memory modules implemented is as follows:
LSTM 1,287,795, ConvLSTM 1,161,395, MDN-RNN
5,109,181, GridLSTM 1,276,787 and 2-GridLSTM
1,424,243.
4 EXPERIMENTAL RESULTS
This section presents the training and test results
obtained. Each different memory module
implemented was trained using three agents
initialized with different seeds The training results
were computed at every 240,000
th
frame over a
window of size w=50 and correspond to the return
scores (averaged over all the agents) obtained during
training in the last w fully completed episodes. After
the training process was completed, each of the three
agents trained, played 100 games for a total of 300
games which were used to derive the test results. For
the statistical significance tests both the one-way
ANOVA as well as the Kruskal-Wallis H-test for
independent samples were used with α=0.05.
The benchmark used to perform and validate the
experiments was the Atari 2600 videogame platform,
available via the OpenAI Gym toolkit. Due to
hardware and time constraints only two games were
used, namely, RiverRaid and ChopperCommand.
These games were selected given that their
performance, as presented in (Mnih et al., 2015), was
below human level (57.3% and 64.8% respectively),
but not so low that it prevented the agents from
learning any meaningful policy. These games also
present a wide range of different challenges. In
RiverRaid the agent must manoeuvre over sometimes
narrow waterways while avoiding the enemies trying
to intercept and destroy it and refuelling to avoid
death. In ChopperCommand the agent must destroy
the enemy airships while avoiding their projectiles.
LSTM, ConvLSTM, MDN-RNN and GridLSTM Memory-based Deep Reinforcement Learning
173
4.1 Results
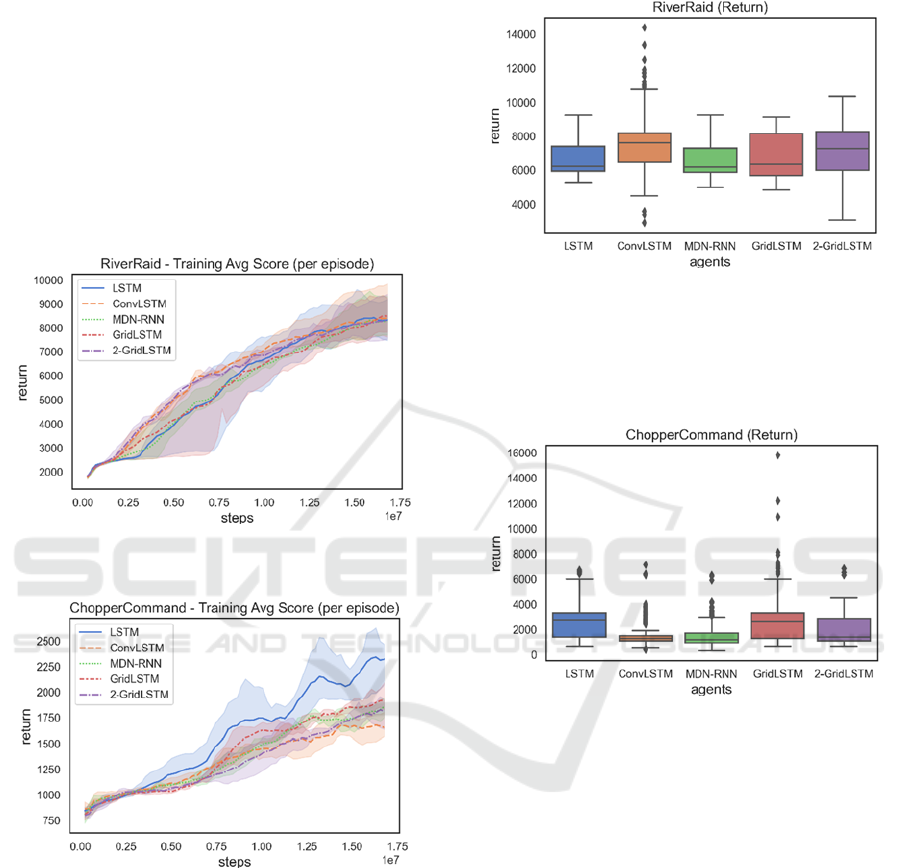
Figures 2 and 3 below, present the training results
obtained for RiverRaid and ChopperCommand,
respectively. As it can be seen, in the case of
Riverraid, all agents seem to exhibit a plateauing
behaviour during the initial phase of training, which
can be more prolonged for some of the agents (e.g.,
LSTM and GridLSTM). At the end of training,
however, all the agents seem to achieve roughly the
same performance. Regarding ChopperCommand,
the LSTM agent seems to learn much more rapidly
than the ConvLSTM-based agents.
Figure 2: Training return per episode for RiverRaid. The
confidence interval used was .95.
Figure 3: Training return per episode for
ChopperCommand. The confidence interval used was .95.
Much more interesting are the return (or
cumulative reward) results obtained by the trained
agents. Performance wise the best agents were the
ConvLSTM agent in Riverraid and the LSTM agent in
ChopperCommand (although followed very closely
by the GridLSTM agent), see Figure 4 and Figure 5,
respectively. These results are also statistically
significant: we reject the null hypothesis (H
0
) that all
the agents have the same return mean results, with p-
values 2.1e-70 and 6.7e-51 for the ANOVA and 4.6
e-50 and 3.8e-50 for the H-test for RiverRaid and
ChopperCommand, respectively.
Figure 4: Test return per episode for RiverRaid. The overall
median values as well as the average result and standard
deviation obtained by the best agent for each memory
module were: LSTM 6205 (7600/726), ConvLSTM 7605
(8090/2076), MDN-RNN 6160 (7225/765), GridLSTM
6330 (7618/831) and 2-GridLSTM 7265 (7997/1050).
Figure 5: Test return per episode for ChopperCommand.
The results are presented similarly to Figure 4 and were:
LSTM 2700 (3003/948), ConvLSTM 1300 (2302/1285),
MDN-RNN 1200 (2147/1117), GridLSTM 2600
(3814/2362) and 2-GridLSTM 1400 (2447/1242).
Also, the difference observed in the return results
obtained by the LSTM and MDN-RNN agents in
RiverRaid does not seem to hold statistical
significance (H
0
is not rejected with p-values 0.13 for
the ANOVA and 0.07 for the H-test). Similarly, in
ChopperCommand the difference observed in the
return results obtained by the ConvLSTM and MDN-
RNN agents and the LSTM and GridLSTM agents
does not seem to hold statistical significance: in the
first case H
0
is not rejected with p-values 0.4 for the
ANOVA and 0.1 for the H-test and in the second case
H
0
is not rejected with p-values 0.7 for the ANOVA
and 0.08 for the H-test.
These tests were also performed using an image
perturbed with gaussian noise with σ=.1, see Figure
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
174
6. The percentage reduction ratios for each agent were
the following (for RiverRaid and ChopperCommand
respectively): LSTM (57/59)%, ConvLSTM (29/38)%,
MDN-RNN (55/50)%, GridLSTM (20/65)% and 2-
GridLSTM (59/21)%. As it can be seen by the results,
and overall, the ConvLSTM agent seemed to be more
resilient to the noise introduced to the image. The
remaining agents suffered a loss in performance
greater or equal than 50% in one or both games.
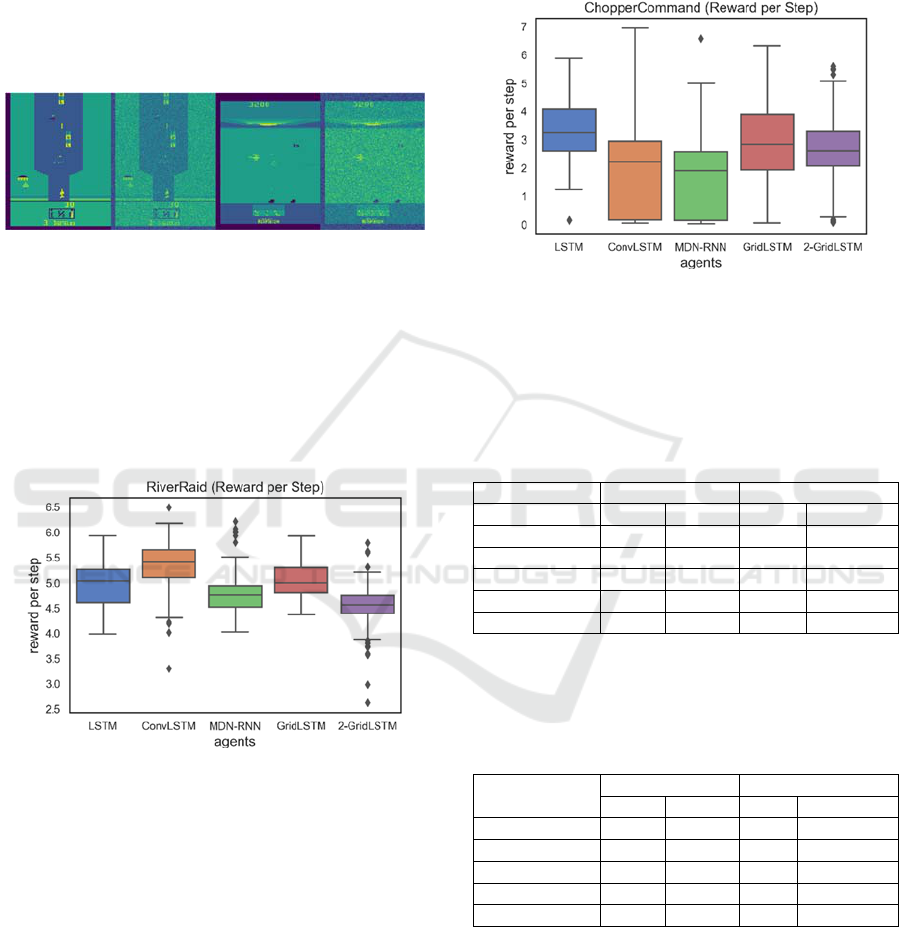
Figure 6: Examples of image perturbation for Riverraid
(second image) and ChopperCommand (last image).
To try to assess possible behavioural differences
in the different memory modules, the results for the
‘number of steps’ and ‘reward per step’ obtained
during testing were also investigated, see Figure 7 and
Figure 8 for a graphical depiction of the results for the
latter and consult Table 1 and Table 2 for the
numerical results concerning both experiments.
Figure 7: Test reward obtained per step (per episode) for
RiverRaid.
After inspection, it can be seen that, similarly to
the results obtained for the return experiments, the
agents with the highest reward/step ratio are the
ConvLSTM agent for RiverRaid and the LSTM agent
in the case of ChopperCommand. An interesting note
to point out, concerning the results in Riverraid, is the
fact that although being the second-best performant
agent in this game, the 2-GridLSTM agent presents
the lowest reward per step among all agents (and also
the highest number of steps, which explains its second
place). Also noteworthy is the low reward/step ratio
of the ConvLSTM and MDN-RNN agents in
ChopperCommand when compared to the high
number of steps achieved by their best agents. After
visual inspection it was found that in certain points of
the game the agent would just turn the chopper
alternately back and forth for a considerable amount
of time.
Figure 8: Test reward obtained per step (per episode) for
ChopperCommand.
Table 1: Test results for the ‘reward per step’ and ‘number
of steps’ experiments in RiverRaid. The overall median
values as well as the average result and standard deviation
obtained by the best agent for each memory module are
depicted. In both cases the differences found on the results
were statistically significant.
RiverRai
d
reward per step number of steps
Me
d
Best Me
d
Best
LSTM 5 5.2/0.3 1339 1445/116
ConvLSTM 5.4 5.6/0.3 1362 1554/340
MDN-RNN 4.8 5/0.3 1328 1507/130
GridLSTM 5 5.2/0.3 1299 1455
/
123
2- GridLSTM 4.6 4.7/0.3 1568 1688
/
231
Table 2: Test results for the ‘reward per step’ and ‘number
of steps’ experiments in ChopperCommand. The results are
presented similarly to Table 1. Again, in both cases the
differences found on the results were statistically
significant.
Chopper
Command
reward
p
er ste
p
number of ste
p
s
Me
d
Best Me
d
Best
LSTM 3.3 3.7/1.0 721 967/1852
ConvLSTM 2.2 2.9/1.0 814 7275/4161
MDN-RNN 1.9 2.2/0.9 844 5585/4637
GridLSTM 2.8 3.6/1.0 842 2927
/
3799
2- GridLSTM 2.6 3.2/1.0 633 2344/3708
The last experiment carried out consisted of
testing the trained agents without their memory
component. In other words, at each time step t, h
t-1
was completely zeroed out before being inputted into
the policy, which means that the only information
available to the trained agent was z
t
(the latent vector
representing the current screen of the game). This also
means that when analysing the results, the greater the
LSTM, ConvLSTM, MDN-RNN and GridLSTM Memory-based Deep Reinforcement Learning
175

reduction ratio observed in the performance, the more
reliant the agent is on its memory module. If on the
other hand there is no significant change in
performance or performance increases, this may be a
hint that the agent does not rely on its memory
module. This may be the case for example, due to a
poor-quality memory module (obtained after
optimization) or simply because the agent was able to
memorize the dynamics of the game to some extent.
When compared to the results presented in Figure
4 and Figure 5 we see that for RiverRaid the
percentage reduction ratio was: LSTM 2.6%,
ConvLSTM 26.6%, MDN-RNN 0.16% increase,
GridLSTM 19.95% increase and 2-GridLSTM 15.8%.
Interestingly, both the MDN-RNN and the GridLSTM
agents improved their return performance values
when the memory component was removed from the
policy input. The differences observed for the MDN-
RNN agent were however not statistically significant
(p-value 0.58 for the ANOVA and 0.62 for the H-
test). The differences observed for the GridLSTM
agent on the other hand were statistically significant
(p-value 9.8e-6 for the ANOVA and 3.5-e5 for the H-
test). For ChopperCommand, removing the memory
information did not produce any (statistically)
significative changes, except for the GridLSTM agent
with a percentage reduction ratio of 42%.
4.2 Saliency Visualization
The saliency metric proposed in (Greydanus et al.,
2018) was used to better assess the different agents
implemented. For this purpose, the saliency maps
were derived using both image perturbation, as
proposed by the referred paper, and memory
perturbation. Memory perturbation was achieved,
similarly to image perturbation, but in this work the
memory positions were zeroed out as opposed to
‘blurred’. Memory perturbation is possible this way
since the ConvLSTM preserves spatial information.
The results reported here were derived by taking
the best trained agent for each memory module,
running it over 20 games and then choosing the game
where the agent achieved a better return score to
perform saliency visualization. The policy network
saliency is displayed in blue whereas the value
network policy is displayed in red. Also, since the
results obtained in ChopperCommand were very poor
for most of the agents, the saliency visualization is
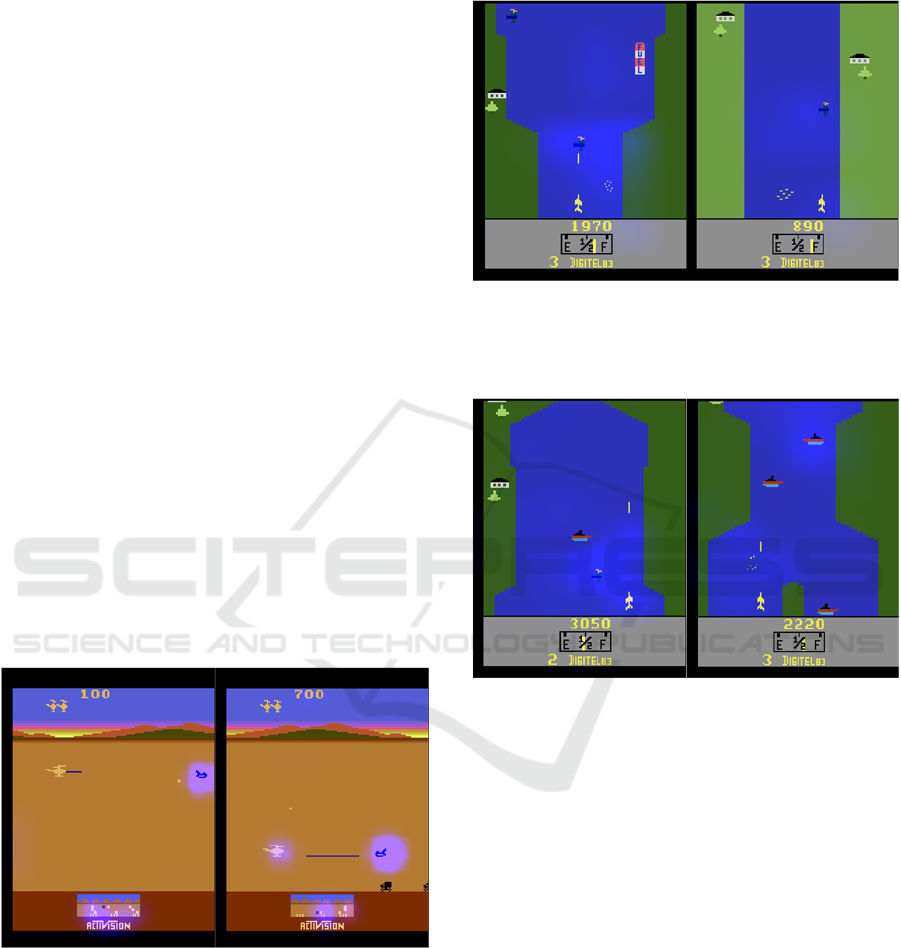
performed mostly in RiverRaid. Figures 9, 10 and 11
depict the saliency maps derived for the memory
agents using image perturbation for Riverraid.
Figure 9: The LSTM agent focusing on the main elements
of the game (left). The value network saliency of the
ConvLSTM agent seems to recognize the value inherent to
having the tank almost empty but still the agent does not
refuel and ends up dying (right).
Figure 10: The MDN-RNN agent focusing on its projectile
(left). The GridLSTM agent refuelling (right).
Figure 11: The 2-GridLSTM agent: near miss (left) and
refuelling for the second time (right).
Generally speaking, all of the agents seem to
focus on the main elements of the game, namely: the
enemies near or further away, the riverbank closer to
the agent and the agent projectile. However, none of
the agents seems to have learned to refuel in a
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
176
consistent way. Some agents seem to focus their value
network on the display information showing that the
tank is empty (e.g., LSTM) but never attempt to refuel,
while others refuel although not in a consistent away
(i.e., GridLSTM one time and 2-GridLSTM two
times).
Overall, the difference in performance observed
seems to stem from how the agents prioritize their
targets and how assertive they are at destroying or
avoiding their enemies and avoiding crashing into the
riverbank. The ConvLSTM agent seems to be better at
this, together with the LSTM agent. The remaining
agents seem to have more trouble choosing their
targets, miss more shoots, seem to be more undecisive
at times, MDN-RNN in particular, gets too close to its
enemies, making it more prone to collisions, and
GridLSTM and 2-GridLSTM are prone to colliding
with the riverbank.
Figure 12 below, depicts the same saliency maps
for ChopperCommand. Overall, all the agents seem to
concentrate on the main elements of the game,
namely: the mini map, the enemies, near or further
away and the agent itself. However, none of the
agents has learned to focus on the projectiles fired by
the enemy fighters. Performance wise both the LSTM
and GridLSTM agents seem to be more assertive and
better at destroying and avoiding the enemy fighters.
The 2-GridLSTM agent for example, often fails to
destroy the enemy fighters and ends up suffering from
frequent near misses due to that fact, which hinders
its performance.
Figure 12: The LSTM agent is focused on the mini map as
well as on its closest enemy (left). Similarly, the GridLSTM
agent is also focused on the same areas and also on the agent
itself (right). None of the agents is focused on the projectiles
fired by the enemy fighters.
Concerning memory perturbation, and generally
speaking, all the memory modules seem to be more
active and focused on the area immediately in front of
the agent and also on the closest enemy. Interestingly,
the area of focus seems to mimic the lateral
movement of the enemies, see Figure 13 and 14.
Figure 13: The memory module of the ConvLSTM agent is
focused on the closest enemy and mimics its lateral
movement (left). The memory activation of the MDN-RNN
agent is faintly focused on the closest enemy (right).
Figure 14: The memory module of the GridLSTM agent is
focused on the closest enemy and mimics its lateral
movement and will focus on the next enemy (left). The
memory activation of the 2- GridLSTM agent is focused on
the closest enemy (just destroyed) and also on a further
away enemy (right).
4.3 Discussion
Concerning Q1 and considering the results obtained
in Riverraid, it seems that at least in some cases
preserving the spatial information does indeed help
improve the quality of the trained agents. Proof of this
is the fact that all ConvLSTM-based agents, with the
exception of the MDN-RNN agent (which obtained
similar results) obtained better performance results
than the LSTM agent. The poor results obtained by the
ConvLSTM-based agents in ChopperCommand,
alongside the better performance obtained by their
GridLSTM-based counterparts, on the other hand,
may be an indication that the ConvLSTM is likely to
be more sensitive to the architecture of the encoder or
LSTM, ConvLSTM, MDN-RNN and GridLSTM Memory-based Deep Reinforcement Learning
177

and memory module or even the size of the memory
itself due to the fact that it is preserving spatial
information.
Regarding Q2, the results do not seem to support
any evidence that a predictive memory such as the
MDN-RNN brings any benefit over the use of a
contextual memory (e.g. LSTM), at least under the
context of the experiments performed. It should be
noted however, that the MDN-RNN relies on the
predictions of a predictive model (being optimized
simultaneously with the agent), which may be wrong
sometimes.
Concerning Q3 and considering Riverraid, it
seems to be the case that in fact different memory
modules produce different behaviours. The
ConvLSTM and LSTM agents seem to be more
greedy, decisive, assertive and efficient whereas
MDN-RNN is prone to near misses and collisions with
the enemies and GridLSTM and 2-GridLSTM are
prone to colliding with the riverbank (and also
enemies to a lesser extent). Some hints to this can be
seen in Table 1, concerning the ‘reward per step’ and
‘number of steps’ results.
Finally, regarding Q4, the results do not seem to
decisively support any claim that using separate
memory sub-modules in parallel brings any
significant improvement in terms of the policies
obtained. While the 2-GridLSTM agent performed
better than the GridLSTM agent in Riverraid, this was
due to a higher number of steps, since the reward per
step obtained was the lowest among all the agents
(and in particular GridLSTM). On the other hand, in
ChopperCommand the GridLSTM agent performed
better than 2-GridLSTM.
5 CONCLUSIONS
Memory-based DRL has achieved much success and
will likely continue to do so. As more memory
architectures and designs are proposed and evolve
over time it is important to perform comparative
studies to assess their capabilities. This was the focus
of this work. For this purpose, four memory modules
based on the LSTM, ConvLSTM, MDN-RNN and
GridLSTM were assessed in the context of DRL,
using the Atari 2600 gaming platform as a testbed.
The results reported here are merely indicative as the
modules used were parameterized out of the box and
further fine tuning, whether be it the architecture of
the encoder and or the memory module or the size of
the memory may significantly improve the results.
ACKNOWLEDGEMENTS
This research was funded by Fundação para a Ciência
e a Tecnologia, grant number SFRH/BD/145723
/2019 - UID/CEC/00127/2019.
REFERENCES
Ba, L. J., Kiros, J. R., & Hinton, G. E. (2016). Layer
Normalization. CoRR, abs/1607.06450. http://
arxiv.org/abs/1607.06450
Bishop, C. M. (1994). Mixture Density Networks.
Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., & Zaremba, W. (2016). OpenAI
Gym. CoRR, abs/1606.01540. http://arxiv.org/
abs/1606.01540
Graves, A. (2013). Generating Sequences With Recurrent
Neural Networks. CoRR, abs/1308.0850. http://
arxiv.org/abs/1308.0850
Graves, A., Mohamed, A., & Hinton, G. E. (2013). Speech
recognition with deep recurrent neural networks. IEEE
International Conference on Acoustics, Speech and
Signal Processing, ICASSP 2013, 6645–6649
Graves, A., Wayne, G., & Danihelka, I. (2014). Neural
Turing Machines. CoRR, abs/1410.5401.
http://arxiv.org/abs/1410.5401
Greydanus, S., Koul, A., Dodge, J., & Fern, A. (2018).
Visualizing and Understanding Atari Agents. In
Proceedings of the 35th International Conference on
Machine Learning, ICML 2018, (Vol. 80, pp. 1787–
1796). PMLR
Ha, D., & Schmidhuber, J. (2018). World Models. CoRR,
abs/1803.10122. http://arxiv.org/abs/1803.10122
Hausknecht, M., & Stone, P. (2015). Deep Recurrent Q-
Learning for Partially Observable MDPs. AAAI Fall
Symposium - Technical Report, FS-15-06, 29–37
Heess, N., Hunt, J. J., Lillicrap, T. P., & Silver, D. (2015,
December 14). Memory-based control with recurrent
neural networks
Hochreiter, S., & Schmidhuber, J. (1997). Long Short-Term
Memory. Neural Computation, 9(8), 1735–1780.
Ioffe, S., & Szegedy, C. (2015). Batch Normalization:
Accelerating Deep Network Training by Reducing
Internal Covariate Shift. In Proceedings of the 32nd
International Conference on Machine Learning, ICML
2015, (Vol. 37, pp. 448–456). JMLR.org
Kalchbrenner, N., Danihelka, I., & Graves, A. (2016). Grid
Long Short-Term Memory. In 4th International
Conference on Learning Representations, ICLR 2016
Kingma, D. P., & Ba, J. (2015). Adam: A Method for
Stochastic Optimization. In 3rd International
Conference on Learning Representations, ICLR 2015,
Conference Track Proceedings
Machado, M. C., Bellemare, M. G., Talvitie, E., Veness, J.,
Hausknecht, M. J., & Bowling, M. (2018). Revisiting
the Arcade Learning Environment: Evaluation
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
178

Protocols and Open Problems for General Agents. J.
Artif. Intell. Res., 61, 523–562
Mnih, V., Badia, A. P., Mirza, M., Graves, A., Lillicrap, T.
P., Harley, T., Silver, D., & Kavukcuoglu, K. (2016).
Asynchronous Methods for Deep Reinforcement
Learning. In Proceedings of the 33nd International
Conference on Machine Learning, ICML 2016, (Vol.
48, pp. 1928–1937)
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A.,
Veness, J., Bellemare, M. G., Graves, A., Riedmiller,
M. A., Fidjeland, A., Ostrovski, G., Petersen, S.,
Beattie, C., Sadik, A., Antonoglou, I., King, H.,
Kumaran, D., Wierstra, D., Legg, S., & Hassabis, D.
(2015). Human-level control through deep
reinforcement learning. Nat., 518(7540), 529–533
Mott, A., Zoran, D., Chrzanowski, M., Wierstra, D., &
Rezende, D. J. (2019). Towards Interpretable
Reinforcement Learning Using Attention Augmented
Agents. In Advances in Neural Information Processing
Systems 32: Annual Conference on Neural Information
Processing Systems 2019, NeurIPS 2019, (pp. 12329–
12338)
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Köpf, A., Yang, E. Z.,
DeVito, Z., Raison, M., Tejani, A., Chilamkurthy, S.,
Steiner, B., Fang, L., … Chintala, S. (2019). PyTorch:
An Imperative Style, High-Performance Deep Learning
Library. In Advances in Neural Information Processing
Systems 32: Annual Conference on Neural Information
Processing Systems 2019, NeurIPS 2019, (pp. 8024–
8035)
Schulman, J., Moritz, P., Levine, S., Jordan, M. I., &
Abbeel, P. (2016). High-Dimensional Continuous
Control Using Generalized Advantage Estimation. In
4th International Conference on Learning
Representations, ICLR 2016
Shi, X., Chen, Z., Wang, H., Yeung, D.-Y., Wong, W.-K.,
& Woo, W. (2015). Convolutional LSTM Network: A
Machine Learning Approach for Precipitation
Nowcasting. In Advances in Neural Information
Processing Systems 28: Annual Conference on Neural
Information Processing Systems 2015, (pp. 802–810)
Sorokin, I., Seleznev, A., Pavlov, M., Fedorov, A., &
Ignateva, A. (2015). Deep Attention Recurrent Q-
Network. CoRR, abs/1512.01693. http://arxiv.org/
abs/1512.01693
Srivastava, N., Mansimov, E., & Salakhutdinov, R. (2015).
Unsupervised Learning of Video Representations using
LSTMs. In Proceedings of the 32nd International
Conference on Machine Learning, ICML 2015, (Vol.
37, pp. 843–852)
Sutskever, I., Vinyals, O., & Le, Q. v. (2014). Sequence to
Sequence Learning with Neural Networks. In
Advances in Neural Information Processing Systems
27: Annual Conference on Neural Information
Processing Systems 2014, (pp. 3104–3112)
Tang, Y., Nguyen, D., & Ha, D. (2020). Neuroevolution of
self-interpretable agents. In GECCO ’20: Genetic and
Evolutionary Computation Conference, 2020 (pp. 414–
424). ACM.
Wayne, G., Hung, C.-C., Amos, D., Mirza, M., Ahuja, A.,
Grabska-Barwinska, A., Rae, J. W., Mirowski, P.,
Leibo, J. Z., Santoro, A., Gemici, M., Reynolds, M.,
Harley, T., Abramson, J., Mohamed, S., Rezende, D. J.,
Saxton, D., Cain, A., Hillier, C., … Lillicrap, T. P.
(2018). Unsupervised Predictive Memory in a Goal-
Directed Agent. CoRR, abs/1803.10760. http://
arxiv.org/abs/1803.10760.
LSTM, ConvLSTM, MDN-RNN and GridLSTM Memory-based Deep Reinforcement Learning
179
