
Interactive Video Saliency Prediction: The Stacked-convLSTM
Approach
N. Wondimu
1,4 a
, U. Visser
3 b
and C. Buche
1,2 c
1
Lab-STICC, Brest National School of Engineering, 29280, Plouzan
´
e, France
2
IRL CROSSING, CNRS, Adelaide, Australia
3
University of Miami, Florida, U.S.A.
4
School of Information Technology and Engineering, Addis Ababa University, Addis Ababa, Ethiopia
Keywords:
Saliency Prediction, Video Saliency, Human Attention, Gaze Prediction, ConvLSTM, Video Saliency Dataset.
Abstract:
Cognitive and neuroscience of attention researches suggest the use of spatio-temporal features for an efficient
video saliency prediction. This is due to the representative nature of spatio-temporal features for data collected
across space and time, such as videos. Video saliency prediction aims to find visually salient regions in a
stream of images. Many video saliency prediction models are proposed in the past couple of years. Due to the
unique nature of videos from that of static images, the earliest efforts to employ static image saliency prediction
models for video saliency prediction task yield reduced performance. Consequently, dynamic video saliency
prediction models that use spatio-temporal features were introduced. These models, especially deep learning
based video saliency prediction models, transformed the state-of-the-art of video saliency prediction to a
better level. However, video saliency prediction still remains a considerable challenge. This has been mainly
due to the complex nature of video saliency prediction and scarcity of representative saliency benchmarks.
Given the importance of saliency identification for various computer vision tasks, revising and enhancing
the performance of video saliency prediction models is crucial. To this end, we propose a novel interactive
video saliency prediction model that employs stacked-ConvLSTM based architecture along with a novel XY-
shift frame differencing custom layer. Specifically, we introduce an encoder-decoder based architecture with
a prior layer undertaking XY-shift frame differencing, a residual layer fusing spatially processed (VGG-16
based) features with XY-shift frame differenced frames, and a stacked-ConvLSTM component. Extensive
experimental results over the largest video saliency dataset, DHF1K, show the competitive performance of our
model against the state-of-the-art models.
1 INTRODUCTION
It is crucial that robotic systems employ robust
computational models that irreproachably mimic hu-
man’s perceptive and action intelligence, in real-time.
Saliency prediction is among the most significant ca-
pabilities of human visual system. The human vi-
sual system is able to quickly distinguish important
scenes in its visual field. The ability to computa-
tionally model this feature of human enables efficient
and realistic human-robot interaction in social stan-
dard robotic environment (Ferreira and Dias, 2014;
Schillaci et al., 2013; Diaz et al., 2019). Specifically,
a
https://orcid.org/0000-0002-0726-9892
b
https://orcid.org/0000-0002-1254-2566
c
https://orcid.org/0000-0003-0264-2683
it plays a vital role in enabling intuitive and natural
human-robot interaction by letting the robot to con-
tinuously pay attention to salient regions in its visual
field (Schillaci et al., 2013; Butko et al., 2008). Be-
sides, these computational models can be used as a
source of efficiency in various computer vision tasks
(Zhang et al., 2018).
Saliency prediction systems have been applied to
various problem domains, such as video segmentation
(Fukuchi et al., 2009; Zhang et al., 2018), video cap-
tioning (Chen et al., 2018; Wang et al., 2018a), video
compression (Guo and Zhang, 2009), image caption-
ing (Cornia et al., 2018) autonomous driving (Pal
et al., 2020; Lateef et al., 2021), human-robotic inter-
action (Schillaci et al., 2013; Schauerte and Stiefel-
hagen, 2014), robot navigation (Roberts et al., 2012;
Chang et al., 2010), surveillance (Yubing et al., 2011;
Wondimu, N., Visser, U. and Buche, C.
Interactive Video Saliency Prediction: The Stacked-convLSTM Approach.
DOI: 10.5220/0011664600003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 2, pages 157-168
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
157

Shao et al., 2019), and other areas (Yun et al., 2019;
Ji et al., 2022).
Visual saliency has been studied from the spatial
(Shi et al., 2015a; Xie and Lu, 2011) and spatio-
temporal perspectives (Marat et al., 2009) . Spatial
information of individual images or frames has been
used to build the earliest static image saliency predic-
tion computational models. Several experiments also
show that, computational models, especially those in-
spired by deep neural networks (DNN), suffice the
problem of static saliency prediction (Itti et al., 1998;
Harel et al., 2006; Huang et al., 2015; Wang and Shen,
2017; Pan et al., 2016). However, because of the
spatio-temporal or dynamic nature of videos, almost
all static image saliency prediction models show ham-
pered performance when employed on video stimu-
lus.
To this end, recent video saliency prediction mod-
els are considering spatio-temporal aspects of video
saliency dataset. This is mainly due to the recent cog-
nitive and neuroscience of attention research findings,
asserting to the importance of spatio-temporal fea-
tures for data collected across space and time (Bohic
and Abraira, 2022; Amso and Scerif, 2015). Besides,
advances in deep neural networks and their ability to
efficiently handle spatio-temporal data contributed a
lot to the growth of DNN inspired dynamic saliency
prediction models.
A number of video saliency computational mod-
els have been produced in recent years. However,
most models use datasets that lack generic, represen-
tative, and diverse instances in unconstrained task-
independent scenarios. This has been exposing them
for over-fitting (Rice et al., 2020) and incapability to
work on real and diverse environment.
Very few computational models have been us-
ing diverse and representative datasets, like DHF1K
(Wang et al., 2018b). The use of large and repre-
sentative video saliency dataset along with advanced
deep neural networks show significant performance
improvement (Bak et al., 2017; Wang et al., 2018b).
However,video saliency prediction problem in a com-
plex and dynamic environment remains a challenge
to this date. To this end, we propose a novel interac-
tive stacked-ConvLSTM based video saliency model.
Our architecture introduce a new XY-Shift frame dif-
ferencing custom layer to boost temporal features on
spatial domain. Moreover, we introduce a novel way
of fusing temporally magnified spatio temporal fea-
tures with features engineered with spatial feature
extractors like VGG-16 (Simonyan and Zisserman,
2014). We use stacked-ConvLSTM component (Shi
et al., 2015b) for sequential fixation prediction over
successive frames. A successive experiments we con-
ducted on the largest video saliency dataset,DHF1K
(Wang et al., 2018b), show that our model achieve
a competitive result against the state-of-the-art meth-
ods.
The rest of the paper is organized as follows. The
second part briefly introduces related research works,
the third part introduce the saliency prediction model
proposed in this paper in detail, the fourth part shows
experimental details of this paper, and finally, a sum-
mary of this paper is presented.
2 RELATED WORKS
Recent researches on visual saliency have been con-
secutively redefining the state-of-the-art in the area.
Most of the earliest saliency models are constructed
from still images. These computational models as-
sume that conspicuous visual features “pop-out” and
involuntarily capture attention (Borji and Itti, 2012).
However, the performance of these models is signif-
icantly hampered as it belittles the impact of tem-
poral features. To this end, recent advances on vi-
sual saliency prediction consider dynamic features for
visual saliency prediction. The growth in this field
of saliency is due to the growth in the area of deep
learning and the availability of larger video saliency
datasets. In this section, existing visual saliency pre-
diction models that define the state-of-the-art in the
area are briefly reviewed.
2.1 Saliency Models
Researches on human gaze fixation prediction or
video saliency prediction is dating back to (Itti and
Koch, 2001; Itti et al., 1998). The earliest saliency
prediction methods are based on various low-level
manual features of still image, such as color con-
trast, edge, center prior and orientation to produce a
“saliency map” (Harel et al., 2006; Le Meur et al.,
2006; Bruce and Tsotsos, 2005; Judd et al., 2009;
Wang et al., 2016; Yang et al., 2013; Jiang et al.,
2013). A saliency map is an image that highlights the
region on which human gaze could focus on a various
probabilistic level.
Low-level feature based saliency models can work
robustly on the simplest detection tasks. However,
these models fail to perform well on a more complex
image structures. To this end, various deep learning
based static saliency researches are published Hou et
al. (Hou et al., 2017), Lee et al. (Itti and Koch, 2001)
and Li and Yu (Itti et al., 1998) Wang et al. (Wang
et al., 2017a) and Zhang et al. (Zhang et al., 2017)
(Vig et al., 2014; Kruthiventi et al., 2017; Huang
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
158

et al., 2015; Liu et al., 2016; Pan et al., 2016; Wang
and Shen, 2017). These models have achieved a re-
markable result using the powerful learning ability of
neural networks and growth in the size and quality of
visual saliency datasets (Huang et al., 2015).
Static image saliency research is almost mature.
However, subsequent trials to employ these models on
video show a reduced performance (Mahadevan and
Vasconcelos, 2009). These is mainly due to the fre-
quent change in salient-goal over time in a sequence
of frames. Furthermore, convolutional neural net-
works (CNN) have no memory function, so it is diffi-
cult to model video frames that are constantly chang-
ing in the time domain with CNN.
To this end, dynamic saliency models leverage
both static and temporal features to predict human
gaze fixation on videos (Gao et al., 2007; Guo and
Zhang, 2009; Mahadevan and Vasconcelos, 2009;
Rudoy et al., 2013; Seo and Milanfar, 2009; Hou
and Zhang, 2008; Fang et al., 2014; Hossein Kha-
toonabadi et al., 2015; Leboran et al., 2016). Some
of these studies (Gao et al., 2007; Mahadevan and
Vasconcelos, 2009; Seo and Milanfar, 2009) can be
viewed as extensions of existing static saliency mod-
els with additional motion features. Conventionally,
video saliency models pair bottom-up feature extrac-
tion with an ad-hoc motion estimation that can be
performed either by means of optical flow or fea-
ture tracking. Frame-differencing (Mech and Woll-
born, 1997), background subtraction (Tsai and Lai,
2008), optical flow (Horn and Schunck, 1981) and
other methods are used to model spatial and motion
information. However, these techniques are known
for poor performance, especially in complex scene
videos.
In contrast, deep video saliency models learn the
whole process end-to-end. Some of these saliency
models treat spatial and temporal features separately
and fuse these features in the last few layers of the
DNN architecture in certain way. Other researches si-
multaneously model the time and space information,
directly letting the network simultaneously learn the
time and space information and ensure the time and
space consistency.
Research works that treat spatial and temporal in-
formation separately base on two-stream network ar-
chitectures (Bak et al., 2017; Zhao and Wu, 2019)
that accounts for color images and motion fields sep-
arately, or two-layer LSTM with object information
(Jiang et al., 2017; Tang et al., 2018)
As one of the first attempts, (Bak et al., 2017)
study the use of deep learning for dynamic saliency
prediction and propose the so-called spatio-temporal
saliency networks. They applied a two-stream (5
layer each) CNN architecture for video saliency pre-
diction. RGB frames and motion maps were fed to
the two streams. They have investigated two different
fusion strategies, namely element-wise and convolu-
tional fusion strategies, to integrate spatial and tem-
poral information.
(Jiang et al., 2017) concluded that human atten-
tion is mainly drawn to objects and their movement.
Hence, they propose object-to-motion convolutional
neural network (OM-CNN) to learn spatio-temporal
features for predicting the intra-frame saliency via ex-
ploring the information of both objectness and object
motion. Inter-frame saliency is computed by means
of a structure-sensitive ConvLSTM architecture.
(Zhao and Wu, 2019) proposes two modules to ex-
tract temporal saliency information and spatial infor-
mation. Moreover, the saliency dynamic information
in time is combined with the spatial static saliency
estimation model, which directly produces the spa-
tiotemporal saliency inference. A context-aware pyra-
mid feature extraction (CPFE) module is designed
for multi-scale high-level feature maps to capture the
rich context features. A channel-wise attention (CA)
model and a spatial attention (SA) model are respec-
tively applied to the CPFE feature maps and the low-
level feature maps, and then fused to detect salient re-
gions. Finally, an edge preservation loss is proposed
to get the accurate boundaries of salient regions.
(Tang et al., 2018) used a multiscale spatiotem-
poral convolutional ConvLSTM network architecture
(MSST-ConvLSTM) to combine temporal and spatial
information for video saliency detection. This archi-
tecture not only retains the original temporal clues but
also uses the temporal information in the optical flow
map and the structure of LSTM. This part of the study
separately learns the information in the time domain
and the space domain through neural networks. Gen-
erally, to model the information in the time domain,
some preprocessing methods, such as the optical flow
method, are used. Additionally, the fusion of features
extracted in the time and space domains also greatly
affect the performance of the network. These works
show a better performance and demonstrate the poten-
tial advantages in applying neural networks to video
saliency problem.
Models that simultaneously model the time and
space information directly let the network to concur-
rently learn the time and space information and ensure
the time and space consistency. For instance, in refer-
ence (Song et al., 2018), the author first used a pyra-
mid dilated convolution module to extract multiscale
spatial features and further extracted spatio-temporal
information through a bidirectional convective Con-
vLSTM structure. Ingeniously, the author used the
Interactive Video Saliency Prediction: The Stacked-convLSTM Approach
159

forward output of the ConvLSTM units as input and
directly fed it into the backward ConvLSTM units,
which increases the capabilities to extract deeper spa-
tiotemporal features.
In reference (Fan et al., 2019), unlike previous
video saliency detection with pixel-level datasets, the
author collected a densely annotated dataset that cov-
ers different scenes, object categories and motion
modes. In (Li et al., 2018), the author proposed a
flow-guided recurrent neural encoder (FGRNE) ar-
chitecture, which uses optical flow networks to es-
timate motion information per frame in the video
and sequential feature evolution encoding in terms of
LSTM network units to enhance the temporal coher-
ence modeling of the per-frame feature representa-
tion.
(Chaabouni et al., 2016) employed transfer learn-
ing to adapt a previously trained deep network for
saliency prediction in natural videos. They trained a
5-layer CNN on RGB color planes and residual mo-
tion for each video frame. However, their model uses
only the very short-term temporal relations of two
consecutive frames. In (Bazzani et al., 2016), a recur-
rent mixture density network is proposed for saliency
prediction. The input clip of 16 frames is fed to a 3D
CNN, whose output becomes the input to a LSTM.
Finally, a linear layer projects the LSTM representa-
tion to a Gaussian mixture model, which describes the
saliency map. In a similar vein, (Mnih et al., 2014)
applied LSTMs to predict video saliency maps, rely-
ing on both short- and long-term memory of attention
deployment.
In (Leifman et al., 2017), RGB color planes, dense
optical flow map, depth map and the previous saliency
map are fed to a 7-layered encoder-decoder structure
to predict fixations of observers who viewed RGBD
videos on a 2D screen.
As in their previous work (Gorji and Clark, 2018),
here they used a multi-stream ConvLSTM to augment
state-of-the-art static saliency models with dynamic
attentional push (shared attention). Their network
contains a saliency pathway and three push path-
ways including gaze following, rapid scene changes,
and attentional bounce. The multi-pathway struc-
ture is followed by a CNN that learns to combine
the complementary and time-varying outputs of the
CNN-LSTMs by minimizing the relative entropy be-
tween the augmented saliency and viewers fixations
on videos.
(Wang et al., 2018b), proposed the Attentive
CNN-LSTM Network which augments a CNN-
LSTM with a supervised attention mechanism to en-
able fast end-to-end saliency learning. The attention
mechanism explicitly encode static saliency informa-
tion allowing LSTM to focus on learning a more flexi-
ble temporal saliency representation across successive
frames. Such a design fully leverages existing large-
scale static fixation datasets, avoids overfitting, and
significantly improves training efficiency.
(Sun et al., 2018) proposed a robust deep model
that utilizes memory and motion information to cap-
ture salient points across successive frames. The
memory information was exploited to enhance the
model generalization by considering the fact that
changes between two adjacent frames are limited
within a certain range, and hence the corresponding
fixations should remain correlated.
There are some more salient object detection mod-
els (Liu et al., 2010; Achanta et al., 2009; Cheng et al.,
2014; Wang et al., 2015; Wang et al., 2017b; Borji
et al., 2015; Hou et al., 2017) that attempt to uni-
formly highlight salient object regions in images or
videos. Those models are often task-driven and focus
on inferring the main object, in stead of investigating
the behavior of the HVS during scene free viewing.
2.2 Video Saliency Dataset
Recent advances in the area of human attention and
dynamic fixation prediction are primarily triggered
by the release of improved and large saliency dataset
(Hadizadeh et al., 2011; Itti, 2004; Mathe and Smin-
chisescu, 2014; Mital et al., 2011). These dataset im-
proved the understanding of human visual attention
and boosted the performance of computational mod-
els.
The DHF1K (Wang et al., 2018b) dataset pro-
vide human fixations on a more diverse and repre-
sentative dynamic nature scenes while free-viewing.
DHF1K includes 1K video sequences annotated by
17 observers with an eye-tracker device.In DHF1K,
each video was manually annotated with a category
label, which was further classified into 7 main cat-
egories: daily activity, sport, social activity, artistic
performance, animal artifact and scenery.
The Hollywood-2 (Mathe and Sminchisescu,
2014) provide a dataset with 12 classes of human ac-
tions and 10 classes of scenes distributed over 3669
video clips and approximately 20.1 hours of video in
total. The dataset intends to provide a comprehen-
sive benchmark for human action recognition in re-
alistic and challenging settings. According to anal-
ysis conducted by (Xie et al., 2020), 84.5 fixations
Hollywood-2 dataset are located around the faces.
The UCF Sports dataset (Mathe and Sminchis-
escu, 2014) consists of a set of actions collected
from various sports which are typically featured on
broadcast television channels such as the BBC and
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
160

ESPN. The video sequences were obtained from a
wide range of stock footage websites including BBC
Motion gallery and GettyImages. It contains 150
videos taken from the UCF sports action dataset (Ro-
driguez et al., 2008). According to (Xie et al., 2020),
82.3 fixations of UCF sports saliency dataset fall in-
side the human body area.
Other datasets are either limited in terms of va-
riety and scale of video stimuli (Mital et al., 2011;
Itti, 2004; Hadizadeh et al., 2011; Bylinskii et al.,
2015; Huang et al., 2015), or collected for a spe-
cial purpose (e.g., salient objects in videos (Wang
et al., 2015)). More importantly, none of the afore-
mentioned datasets includes a preserved test set for
avoiding potential data overfitting, which has seri-
ously hampered the research process.
3 OUR APPROACH
3.1 Overview
We propose a novel stacked-ConvLSTM based video
saliency prediction model. Fig. 1 depicts the archi-
tecture of our video saliency prediction model. It
is a stacked-ConvLSTM architecture that use both
convolutional and recurrent networks. Input to our
stacked-ConvLSTM are preprocessed using a novel
XY-shift frame differencing layer. This layer takes an
absolute difference of an image and its shifted copy
and return a high-pass filtered map. Furthermore, a
three-frame differencing method takes this data and
provide a temporal information aware spatial data
map. Three-frame differencing help to magnify the
effect of temporal features on the spatial domain and
boost the capacity of the stacked-ConvLSTM com-
ponent on spatio-temporal saliency prediction. Thus,
our model produce accurate video saliency predic-
tion with improved generalization. In this section,
we introduce our proposed model architecture, and
its three important components, namely the stacked-
ConvLSTM module, the VGG-16 (Simonyan and Zis-
serman, 2014), and the XY-shift frame differencing
module in detail.
3.2 The Stacked-ConvLSTM Model
Fig 1 shows our proposed framework, consisting of
three parts: the static convolutional component based
on VGG-16 and with the weights of ImageNet (Deng
et al., 2009), XY-shift frame differencing and the
stacked-ConvLSTM component.
3.3 Implementation Details
The implementation details are as follows. First, two-
stream of data are passed to the VGG-16 and frame
differencing components. The VGG-16 (Simonyan
and Zisserman, 2014) extract spatial features from the
raw image frames. In order to preserve more spatial
details, Pool 4 and Pool 5 layers are removed, result-
ing in x8 instead of ×32 downsampling. At time step
t, the input RGB image X
t
size is (224×224×3). The
output characteristic size of this component is [32, 40,
512]. Concurrently, we apply a batch level XY-shift
frame differencing and three-frame differencing on
each members of a batch to magnify temporal features
on spatial domain. The XY-shift frame differencing
differs a frame from its shifted replica. The effect of
this operation is equivalent to the result of a high-pass
filter method, but with significantly smaller compu-
tational resource. We have mainly used this method
to reduce the visibility of irrelevant background ob-
jects and expose foreground objects. The mathemat-
ical formalization of XY-shift frame differencing is
depicted as follows in equation 1. Let a be the first
channel of image A with a shape of (h,w,3). Then, the
XY-shift frame differencing of a is calculated as:
g(a) =
a(x
i
, y
j
) − a(x
i+ f
+, y
j+ f
), if
i <= h − f and j <= w − f
a(x
i
, y
j
) − a(x
i− f
+, y
j− f
), if i = h or j = w.
(1)
where h and w stands for the height and width of the
channel and f is a shift factor.
What follows the XY-shift frame differencing is
an improved three-frame differencing technique. This
technique use the output of XY-shift differencing.
It takes three consecutive frames, compute the dif-
ference between the current frame and the previous
frame, the current frame and the next frame sepa-
rately, and extract a pixel-wise max between these
two resulting frames. This technique is adapted and
enhanced to improve the extraction of temporal fea-
tures from datasets in spatio-temporal domain. The
improved three-frame differencing method is formal-
ized as follows in equation 2. Let A,B, and C be the
first channel of three consecutive XY-shift frame dif-
ferenced frames with a shape of (h,w). Let B be the
first channel of the current frame. Then the improved
three-frame differencing, f(A,B,C), is calculated as:
f (A, B,C)
i, j
= max
i, j
(|B
i, j
− A
i, j
|, |B
i, j
−C
i, j
|) (2)
where for i,j >= 0 and i<= h and j <= w.
Furthermore, the pixel-wise maximum of two im-
ages is computed as shown in 3. Let Q1 be the ab-
solute difference of the current frame B and its pre-
decessor frame A. Let Q2 be the absolute difference
Interactive Video Saliency Prediction: The Stacked-convLSTM Approach
161
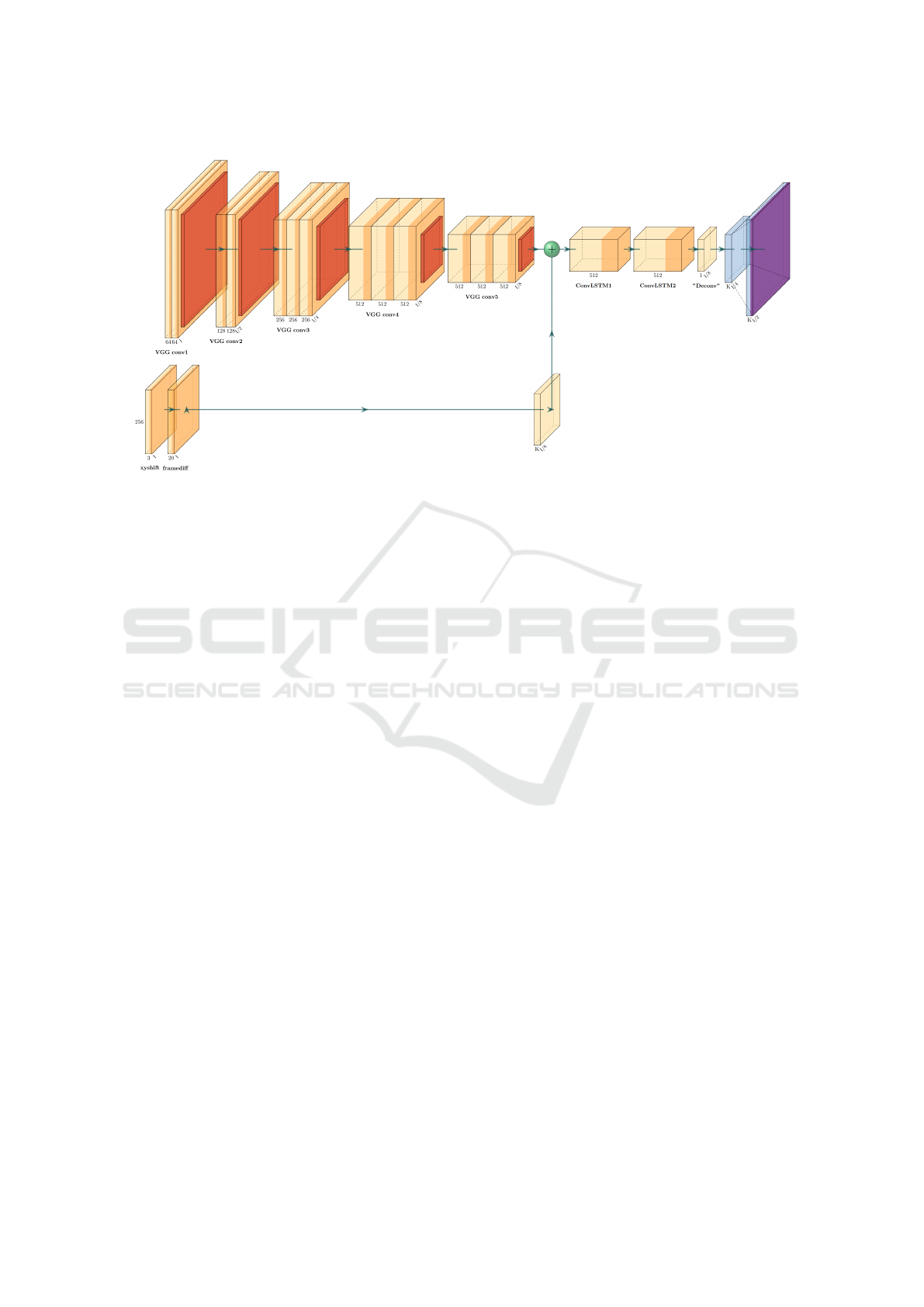
Figure 1: Interactive Video Saliency Identification With Attentive ConvLSTM Architecture.
of the current frame B and its successor frame C.
Let’s say both differenced images have a size of (h,w).
Then, the pixel-wise maximum, P
m
ax, of these two
frames is calculated as:
max(Q1, Q2)
i, j
=
(
Q1
i, j
, if Q
i, j
> Q2
i, j
Q2
i, j
, if otherwise
(3)
where for i,j >= 0 and i<= h and j <= w.
A residual layer fusing the VGG-16 extracted spa-
tial features and frame differencing output frames is
applied succeeding the aforementioned components.
Finally, the output of both VGG-16 and frame differ-
encing mixed layer is deep fused into a single feature
space. A [30x40x512] output of the residual layer is
further fed to our stacked-ConvLSTM network. The
main reason for stacking ConvLSTM is to allow for
greater model complexity. Even though there are
large-scale datasets like DHF1K that have 1K videos,
the amount of training data is still insufficient, consid-
ering the high correlation among frames within same
video (Jiang et al., 2017). Hence, increasing the com-
plexity of the model help to extract more complex
features in return providing robust video saliency pre-
diction model. The size of the feature map after the
stacked-ConvLSTM is 32x40x256. By passing this
output through a convolutional layer, with kernel size
1x1, and upsampling the resulting feature map, we get
128x160x1 and 64x80x1 saliency map corresponding
to the different loss functions we employed in this re-
search work.
3.4 Loss Functions
To better generate robust saliency maps, we use three
loss functions as used in (Jiang et al., 2018) and
(Wang et al., 2018b). Linear Correlation Coeffi-
cient(CC) (Jost et al., 2005), the Kullback-Leibler
divergence (KLD) (Tatler et al., 2005) and Normal-
ized Scanpath Saliency (NSS) (Peters et al., 2005).
The essence of using multiple loss functions is to in-
crease the degree of learning and generalization of the
model.
We denote the predicted saliency map as Y ∈
[0, 1]
28x28
, the map of fixation locations as P ∈
{0, 1}
28x28
and the continuous saliency map (distri-
bution) as Q ∈ [0,1]
28x28
. Here the fixation map P is
discrete, that records whether a pixel receives human
fixation. The continuous saliency map is obtained via
blurring each fixation location with a small Gaussian
kernel. Our loss functions is defined as follows:
L(Y, P, Q) = L
KL
(Y, Q)+ α
1
L
CC
(Y, Q)+ α
2
L
NSS
(Y, P)
(4)
where L
KL
, L)CCandL
NSS
are the Kullback-
Leibler (KL) divergence, the Linear Correlation Co-
efficient (CC), and the Normalized Scanpath Saliency
(NSS), respectively, which are derived from com-
monly used metrics to evaluate saliency prediction
models. αs are balance parameters and are empiri-
cally set to α
1
= α
2
= 0.1.
Kullback–Leibler divergence (KLD) measures the
divergence between the distribution S and
ˆ
S:
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
162

L
KL
(S,
ˆ
S) =
NXM
∑
i=1
ˆ
S
i
log
ˆ
S
i
Si
(5)
Normalized Scanpath Saliency metric was intro-
duced in (Peters et al., 2005), to evaluate the de-
gree of congruency between human eye fixations and
a predicted saliency map. Instead of relying on a
saliency map as ground truth, the predictions are eval-
uated against the true fixations map. The value of the
saliency map at each fixation point is normalized with
the whole saliency map variance:
L
NSS
(S
f ix
,
ˆ
S) =
1
NX M
NXM
∑
i=1
[
ˆ
S
i
− µ(
ˆ
S
i
)
α(
ˆ
S
i
)
]S
f ix
i
(6)
Pearson’s Correlation Coefficient (CC) measures
the linear correlation between the ground truth
saliency map and the predicted saliency map:
L
CC
(S,
ˆ
S) =
α(S,
ˆ
S)
α(S)α(
ˆ
S)
(7)
3.5 Training Protocol
Our model is iteratively trained with sequential fix-
ation and image data. In training, a video training
batch is cascaded with an image training batch. More
specifically, in a video training batch, we apply a
loss defined over the final dynamic saliency prediction
from LSTM. For each video training batch, 20 con-
secutive frames from the same video are used. Both
the video and the start frames are randomly selected.
For each image training batch, we set the batch size
as 20, and the images are randomly sampled from ex-
isting static fixation dataset.
4 EXPERIMENTS
4.1 Datasets and Evaluation Mertrics
4.1.1 Datasets
We use the DHF1K (Wang et al., 2018b) dataset for
training and evaluation. We use only the first 70%
of the DHF1K dataset and used 70%/10%/30% train-
ing/validation/testing ratio to split data for the exper-
iment. Hence, our model is trained and validated on
420 and 70 randomly selected videos. Moreover, the
evaluation of our proposed model is undertaken on
210 test video sequences.
4.1.2 Evaluation Metrics
We use five performance evaluation metrics, namely
Normalized Scanpath Saliency (NSS), Similarity
Metric (SIM), Linear Correlation Coefficient (CC),
AUC-Judd (AUC-J), and shuffled AUC (s-AUC).
4.1.3 Competitors
To prove the effectiveness of our proposed model,
we compare our model with sixteen saliency models.
Among them, (Wang et al., 2018b), PQFT (Guo and
Zhang, 2009), Seo et al. (Seo and Milanfar, 2009),
Rudoy et al.(Rudoy et al., 2013), Hou et al. (Hou and
Zhang, 2008), Fang et al. (Fang et al., 2014), OBDL
(Hossein Khatoonabadi et al., 2015), AWS-D (Lebo-
ran et al., 2016), OM-CNN (Jiang et al., 2017), and
Two-stream (Bak et al., 2017) are dynamic saliency
models. Furthermore, ITTI (Itti et al., 1998), GBVS
(Harel et al., 2006), SALICON (Huang et al., 2015),
DVA (Wang and Shen, 2017), Shallow-Net (Pan et al.,
2016), and Deep-Net (Pan et al., 2016) are state-
of-the-art static attention models. OM-CNN, Two-
stream, SALICON, DVA, Shallow-Net, and Deep-
Net are deep learning models, and others are clas-
sical saliency models. We choose these models due
to publicly available implementations and their repre-
sentability of the state-of-the-art.
4.1.4 Computational Load
The whole model is trained in an end-to-end man-
ner. The entire training procedure takes about 60
hours with a single NVIDIA Quadro RTX 3000 Max-
Q GPU. Our model takes about 0.84s to process a
frame image of size 224 × 224.
4.2 Performance Comparison
4.2.1 Performance on DHF1K
Table 1 presents the comparative performance of our
model against the competitor models. It is observed
that our model significantly outperformed all static
saliency models and the majority of dynamic mod-
els, across all performance metrics. Our model show
competitive result with the one reported in (Wang
et al., 2018b). This is directly attributed to the novel
XY-shift frame differencing technique and stacked-
ConvLSTM network incorporated in our architecture.
4.3 Analysis
In the course of our research, we have conducted ex-
tensive experiments. Here, we analyse our model and
Interactive Video Saliency Prediction: The Stacked-convLSTM Approach
163
Table 1: Quantitative results on DHF1K: Training setting I is trained and evaluated using only DHF1K dataset.
Models/Datasets
DHF1K
AUC-J SIM s-AUC CC NSS
Dynamic models
(Guo and Zhang, 2009) 0.699 0.139 0.562 0.137 0.749
(Seo and Milanfar, 2009) 0.635 0.142 0.499 0.070 0.334
(Rudoy et al., 2013) 0.769 0.214 0.501 0.285 1.498
(Hou and Zhang, 2008) 0.726 0.167 0.545 0.150 0.847
(Fang et al., 2014) 0.819 0.198 0.537 0.273 1.539
(Hossein Khatoonabadi et al., 2015) 0.638 0.171 0.500 0.117 0.495
(Leboran et al., 2016) 0.703 0.157 0.513 0.174 0.940
(Jiang et al., 2017) 0.856 0.256 0.583 0.344 1.911
(Bak et al., 2017) 0.834 0.197 0.581 0.325 1.632
(Wang et al., 2018b) 0.885 0.311 0.553 0.415 2.259
Static models
(Itti et al., 1998) 0.774 0.162 0.553 0.233 1.207
(Harel et al., 2006) 0.828 0.186 0.554 0.283 1.474
(Huang et al., 2015) 0.857 0.232 0.590 0.327 1.901
(Pan et al., 2016) Shallow-Net 0.833 0.182 0.529 0.295 1.509
(Pan et al., 2016) Deep-Net 0.855 0.201 0.592 0.331 1.775
(Wang and Shen, 2017) 0.860 0.262 0.595 0.358 2.013
Training Setting I Our model 0.878 0.304 0.665 0.405 2.239
competitive models thoroughly with the intention of
giving deeper insight to the state-of-the-art models
and suggest opportunities that we believe are inspir-
ing for future work in dynamic video prediction.
We conduct our analysis first by contrasting the
effect of employing deep learning methods for static
and dynamic saliency prediction. According to our
finding, deep learning methods outperform classical
methods both in static DVA (Wang and Shen, 2017),
Deep-Net (Pan et al., 2016) and dynamic OM-CNN
(Jiang et al., 2017), Two-stream (Bak et al., 2017),
ACL (Wang et al., 2018b) saliency prediction prob-
lems, and in almost all saliency prediction metrics.
On the other hand, classical methods show relatively
reduced performance in static saliency predication
ITTI (Itti et al., 1998),GBVS (Harel et al., 2006). A
significant performance degradation is observed when
static saliency prediction algorithms are employed for
dynamic saliency prediction problem sets PQFT (Guo
and Zhang, 2009), (Seo and Milanfar, 2009), (Rudoy
et al., 2013), (Hou and Zhang, 2008), (Fang et al.,
2014). This demonstrates the strong learning ability
of deep neural network and the promise of developing
deep learning network based models in this challeng-
ing area. Moreover, the analyses show the inherent
incapability of classic machine learning methods for
complex problem sets such as, saliency prediction.
4.4 Ablation Study
In this section, we discuss component wise contribu-
tion of our model. We verify the effectiveness of vari-
ous components and their order of composition in our
model.
The effectiveness of the XY-shift frame differenc-
ing technique is analyzed by eliminating its effect
from the general architecture. A stacked-ConvLSTM
architecture without our novel frame differencing
layer show reduced performance in capturing saliency
in highly dynamic scenes. Quantitatively speaking,
we noticed 20 to 25 percent performance reduction
in all evaluation metrics we employed. Performance
gains due to the novel XY-shift frame differencing is
attributed to the magnified temporal features in the
spatial domain. Magnifying temporal features in the
spatial domain help the stacked-ConvLSTM compo-
nent to easily extract spatio-temporal saliency fea-
tures.
Besides, due to the complex nature of dynamic
saliency prediction, the use of stacked-ConvLSTM
component right after a spatial feature extractor com-
ponent improve our model’s performance on complex
feature extraction. Consequently, the use of stacked-
ConvLSTM rather than a single ConvLSTM architec-
ture show slight performance improvement.
Another interesting finding in the course of our re-
search is the effect of residual layer positioning. The
variation in the position of residual layers show sig-
nificant performance variation. We placed residual
layers residual layers in different positions, such as
at the end of the primary convolutional base, between
the ConvLSTM layer, and finally, at the end of our
overall encoder, processing every input in a separate
stream. Placing residual layer at the beginning of the
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
164
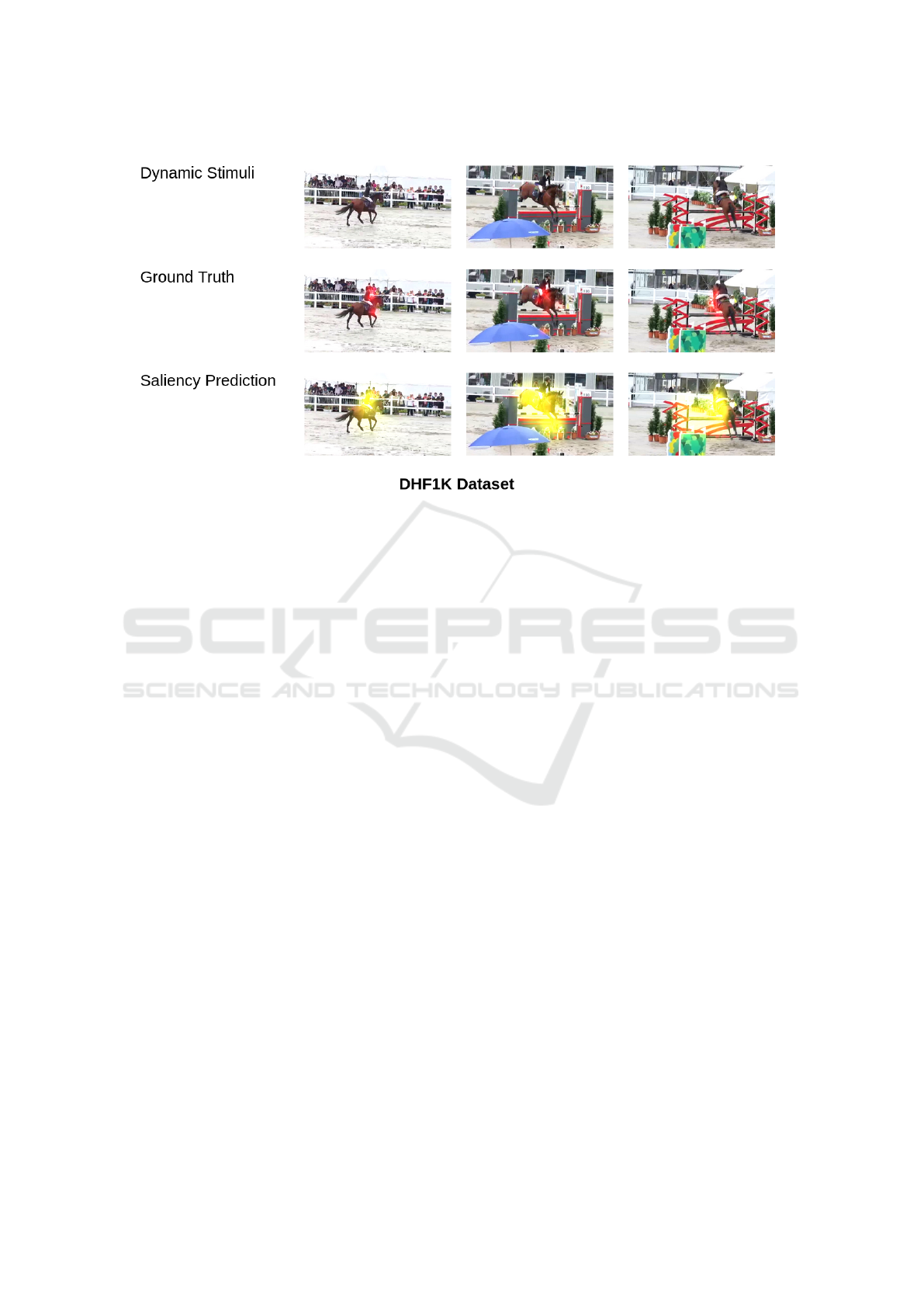
Figure 2: Qualitative results of our video saliency model on DHF1K Dataset.
stacked-ConvLSTM component yield better saliency
prediction performance and relatively better resource
utilization.
Similarly, we undertook a through qualitative
analysis by randomly selecting sequence of frames
from our testing set. On the other hand, the interactiv-
ity (Wondimu et al., 2022) of our model is evaluated
by deploying it in a resource constrained robot called
Pepper. The results show the effectiveness of our
video saliency prediction model relative to the state-
of-the-art video saliency prediction models. More-
over,
5 CONCLUSION
In this research, we proposed a novel deep learning
based dynamic saliency prediction model, which em-
ploy the benefits of a novel XY-shift frame differ-
encing technique and stacked-ConvLSTM network.
An extensive experimentation on the largest video
saliency dataset, DHF1K (Wang et al., 2018b) is un-
dertaken. We compared our results with similar deep
learning based dynamic saliency models. Our exper-
imental results show the effectiveness and superiority
of our model against 15 state-of-the-art models and its
competitiveness against the outperforming dynamic
saliency prediction model (Wang et al., 2018b).
ACKNOWLEDGEMENTS
This work would not have been possible without the
financial support of the French Embassy in Ethiopia,
Brittany region administration and the Ethiopia Min-
istry of Education (MoE). We are also indebted to
Brest National School of Engineering (ENIB) and
specifically LAB-STICC for creating such a con-
ducive research environment.
REFERENCES
Achanta, R., Hemami, S., Estrada, F., and Susstrunk, S.
(2009). Frequency-tuned salient region detection. In
2009 IEEE conference on computer vision and pattern
recognition, pages 1597–1604. IEEE.
Amso, D. and Scerif, G. (2015). The attentive brain:
insights from developmental cognitive neuroscience.
Nature Reviews Neuroscience, 16(10):606–619.
Bak, C., Kocak, A., Erdem, E., and Erdem, A.
(2017). Spatio-temporal saliency networks for dy-
namic saliency prediction. IEEE Transactions on Mul-
timedia, 20(7):1688–1698.
Bazzani, L., Larochelle, H., and Torresani, L. (2016). Re-
current mixture density network for spatiotemporal vi-
sual attention. arXiv preprint arXiv:1603.08199.
Bohic, M. and Abraira, V. E. (2022). Wired for social touch:
the sense that binds us to others. Current Opinion in
Behavioral Sciences, 43:207–215.
Borji, A., Cheng, M.-M., Jiang, H., and Li, J. (2015).
Salient object detection: A benchmark. IEEE trans-
actions on image processing, 24(12):5706–5722.
Interactive Video Saliency Prediction: The Stacked-convLSTM Approach
165

Borji, A. and Itti, L. (2012). State-of-the-art in visual atten-
tion modeling. IEEE transactions on pattern analysis
and machine intelligence, 35(1):185–207.
Bruce, N. and Tsotsos, J. (2005). Saliency based on infor-
mation maximization. Advances in neural information
processing systems, 18.
Butko, N. J., Zhang, L., Cottrell, G. W., and Movellan, J. R.
(2008). Visual saliency model for robot cameras. In
2008 IEEE International Conference on Robotics and
Automation, pages 2398–2403. IEEE.
Bylinskii, Z., Judd, T., Borji, A., Itti, L., Durand, F., Oliva,
A., and Torralba, A. (2015). Mit saliency benchmark.
MIT Press.
Chaabouni, S., Benois-Pineau, J., and Amar, C. B. (2016).
Transfer learning with deep networks for saliency pre-
diction in natural video. In 2016 IEEE International
Conference on Image Processing (ICIP), pages 1604–
1608. IEEE.
Chang, C.-K., Siagian, C., and Itti, L. (2010). Mobile
robot vision navigation & localization using gist and
saliency. In 2010 IEEE/RSJ International Conference
on Intelligent Robots and Systems, pages 4147–4154.
IEEE.
Chen, Y., Zhang, W., Wang, S., Li, L., and Huang, Q.
(2018). Saliency-based spatiotemporal attention for
video captioning. In 2018 IEEE fourth international
conference on multimedia big data (BigMM), pages
1–8. IEEE.
Cheng, M.-M., Mitra, N. J., Huang, X., Torr, P. H., and
Hu, S.-M. (2014). Global contrast based salient region
detection. IEEE transactions on pattern analysis and
machine intelligence, 37(3):569–582.
Cornia, M., Baraldi, L., Serra, G., and Cucchiara, R. (2018).
Paying more attention to saliency: Image caption-
ing with saliency and context attention. ACM Trans-
actions on Multimedia Computing, Communications,
and Applications (TOMM), 14(2):1–21.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Diaz, C. G., Perry, P., and Fiebrink, R. (2019). Interactive
machine learning for more expressive game interac-
tions. In 2019 IEEE Conference on Games (CoG),
pages 1–2. IEEE.
Fan, D.-P., Wang, W., Cheng, M.-M., and Shen, J. (2019).
Shifting more attention to video salient object detec-
tion. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
8554–8564.
Fang, Y., Wang, Z., Lin, W., and Fang, Z. (2014). Video
saliency incorporating spatiotemporal cues and uncer-
tainty weighting. IEEE transactions on image pro-
cessing, 23(9):3910–3921.
Ferreira, J. F. and Dias, J. (2014). Attentional mecha-
nisms for socially interactive robots–a survey. IEEE
Transactions on Autonomous Mental Development,
6(2):110–125.
Fukuchi, K., Miyazato, K., Kimura, A., Takagi, S., and
Yamato, J. (2009). Saliency-based video segmenta-
tion with graph cuts and sequentially updated priors.
In 2009 IEEE International Conference on Multime-
dia and Expo, pages 638–641. IEEE.
Gao, D., Mahadevan, V., and Vasconcelos, N. (2007). The
discriminant center-surround hypothesis for bottom-
up saliency. Advances in neural information process-
ing systems, 20.
Gorji, S. and Clark, J. J. (2018). Going from image to video
saliency: Augmenting image salience with dynamic
attentional push. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 7501–7511.
Guo, C. and Zhang, L. (2009). A novel multiresolution spa-
tiotemporal saliency detection model and its applica-
tions in image and video compression. IEEE transac-
tions on image processing, 19(1):185–198.
Hadizadeh, H., Enriquez, M. J., and Bajic, I. V. (2011).
Eye-tracking database for a set of standard video se-
quences. IEEE Transactions on Image Processing,
21(2):898–903.
Harel, J., Koch, C., and Perona, P. (2006). Graph-based
visual saliency. Advances in neural information pro-
cessing systems, 19.
Horn, B. K. and Schunck, B. G. (1981). Determining optical
flow. Artificial intelligence, 17(1-3):185–203.
Hossein Khatoonabadi, S., Vasconcelos, N., Bajic, I. V., and
Shan, Y. (2015). How many bits does it take for a stim-
ulus to be salient? In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 5501–5510.
Hou, Q., Cheng, M.-M., Hu, X., Borji, A., Tu, Z., and
Torr, P. H. (2017). Deeply supervised salient object
detection with short connections. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 3203–3212.
Hou, X. and Zhang, L. (2008). Dynamic visual attention:
Searching for coding length increments. Advances in
neural information processing systems, 21.
Huang, X., Shen, C., Boix, X., and Zhao, Q. (2015). Sal-
icon: Reducing the semantic gap in saliency predic-
tion by adapting deep neural networks. In Proceedings
of the IEEE international conference on computer vi-
sion, pages 262–270.
Itti, L. (2004). Automatic foveation for video compres-
sion using a neurobiological model of visual attention.
IEEE transactions on image processing, 13(10):1304–
1318.
Itti, L. and Koch, C. (2001). Computational modelling
of visual attention. Nature reviews neuroscience,
2(3):194–203.
Itti, L., Koch, C., and Niebur, E. (1998). A model of
saliency-based visual attention for rapid scene anal-
ysis. IEEE Transactions on pattern analysis and ma-
chine intelligence, 20(11):1254–1259.
Ji, J., Xiang, K., and Wang, X. (2022). Scvs: blind image
quality assessment based on spatial correlation and vi-
sual saliency. The Visual Computer, pages 1–16.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
166

Jiang, H., Wang, J., Yuan, Z., Wu, Y., Zheng, N., and Li, S.
(2013). Salient object detection: A discriminative re-
gional feature integration approach. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 2083–2090.
Jiang, L., Xu, M., Liu, T., Qiao, M., and Wang, Z. (2018).
Deepvs: A deep learning based video saliency predic-
tion approach. In Proceedings of the european confer-
ence on computer vision (eccv), pages 602–617.
Jiang, L., Xu, M., and Wang, Z. (2017). Predicting video
saliency with object-to-motion cnn and two-layer con-
volutional lstm. arXiv preprint arXiv:1709.06316.
Jost, T., Ouerhani, N., Von Wartburg, R., M
¨
uri, R., and
H
¨
ugli, H. (2005). Assessing the contribution of color
in visual attention. Computer Vision and Image Un-
derstanding, 100(1-2):107–123.
Judd, T., Ehinger, K., Durand, F., and Torralba, A. (2009).
Learning to predict where humans look. In 2009
IEEE 12th international conference on computer vi-
sion, pages 2106–2113. IEEE.
Kruthiventi, S. S., Ayush, K., and Babu, R. V. (2017). Deep-
fix: A fully convolutional neural network for predict-
ing human eye fixations. IEEE Transactions on Image
Processing, 26(9):4446–4456.
Lateef, F., Kas, M., and Ruichek, Y. (2021). Saliency heat-
map as visual attention for autonomous driving using
generative adversarial network (gan). IEEE Transac-
tions on Intelligent Transportation Systems.
Le Meur, O., Le Callet, P., Barba, D., and Thoreau, D.
(2006). A coherent computational approach to model
bottom-up visual attention. IEEE transactions on pat-
tern analysis and machine intelligence, 28(5):802–
817.
Leboran, V., Garcia-Diaz, A., Fdez-Vidal, X. R., and Pardo,
X. M. (2016). Dynamic whitening saliency. IEEE
transactions on pattern analysis and machine intelli-
gence, 39(5):893–907.
Leifman, G., Rudoy, D., Swedish, T., Bayro-Corrochano,
E., and Raskar, R. (2017). Learning gaze transitions
from depth to improve video saliency estimation. In
Proceedings of the IEEE International Conference on
Computer Vision, pages 1698–1707.
Li, G., Xie, Y., Wei, T., Wang, K., and Lin, L. (2018).
Flow guided recurrent neural encoder for video salient
object detection. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 3243–3252.
Liu, N., Han, J., Liu, T., and Li, X. (2016). Learning to
predict eye fixations via multiresolution convolutional
neural networks. IEEE transactions on neural net-
works and learning systems, 29(2):392–404.
Liu, T., Yuan, Z., Sun, J., Wang, J., Zheng, N., Tang, X.,
and Shum, H.-Y. (2010). Learning to detect a salient
object. IEEE Transactions on Pattern analysis and
machine intelligence, 33(2):353–367.
Mahadevan, V. and Vasconcelos, N. (2009). Spatiotempo-
ral saliency in dynamic scenes. IEEE transactions on
pattern analysis and machine intelligence, 32(1):171–
177.
Marat, S., Ho Phuoc, T., Granjon, L., Guyader, N., Pel-
lerin, D., and Gu
´
erin-Dugu
´
e, A. (2009). Modelling
spatio-temporal saliency to predict gaze direction for
short videos. International journal of computer vision,
82(3):231–243.
Mathe, S. and Sminchisescu, C. (2014). Actions in the eye:
Dynamic gaze datasets and learnt saliency models for
visual recognition. IEEE transactions on pattern anal-
ysis and machine intelligence, 37(7):1408–1424.
Mech, R. and Wollborn, M. (1997). A noise robust
method for segmentation of moving objects in video
sequences. In 1997 IEEE International conference on
acoustics, speech, and signal processing, volume 4,
pages 2657–2660. IEEE.
Mital, P. K., Smith, T. J., Hill, R. L., and Henderson, J. M.
(2011). Clustering of gaze during dynamic scene
viewing is predicted by motion. Cognitive computa-
tion, 3(1):5–24.
Mnih, V., Heess, N., Graves, A., et al. (2014). Recurrent
models of visual attention. Advances in neural infor-
mation processing systems, 27.
Pal, A., Mondal, S., and Christensen, H. I. (2020). ” look-
ing at the right stuff”-guided semantic-gaze for au-
tonomous driving. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 11883–11892.
Pan, J., Sayrol, E., Giro-i Nieto, X., McGuinness, K., and
O’Connor, N. E. (2016). Shallow and deep convolu-
tional networks for saliency prediction. In Proceed-
ings of the IEEE conference on computer vision and
pattern recognition, pages 598–606.
Peters, R. J., Iyer, A., Itti, L., and Koch, C. (2005). Compo-
nents of bottom-up gaze allocation in natural images.
Vision research, 45(18):2397–2416.
Rice, L., Wong, E., and Kolter, Z. (2020). Overfitting in
adversarially robust deep learning. In International
Conference on Machine Learning, pages 8093–8104.
PMLR.
Roberts, R., Ta, D.-N., Straub, J., Ok, K., and Dellaert, F.
(2012). Saliency detection and model-based tracking:
a two part vision system for small robot navigation
in forested environment. In Unmanned Systems Tech-
nology XIV, volume 8387, page 83870S. International
Society for Optics and Photonics.
Rodriguez, M. D., Ahmed, J., and Shah, M. (2008). Action
mach a spatio-temporal maximum average correlation
height filter for action recognition. In 2008 IEEE con-
ference on computer vision and pattern recognition,
pages 1–8. IEEE.
Rudoy, D., Goldman, D. B., Shechtman, E., and Zelnik-
Manor, L. (2013). Learning video saliency from hu-
man gaze using candidate selection. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 1147–1154.
Schauerte, B. and Stiefelhagen, R. (2014). “look at this!”
learning to guide visual saliency in human-robot inter-
action. In 2014 IEEE/RSJ International Conference
on Intelligent Robots and Systems, pages 995–1002.
IEEE.
Interactive Video Saliency Prediction: The Stacked-convLSTM Approach
167

Schillaci, G., Bodiro
ˇ
za, S., and Hafner, V. V. (2013). Evalu-
ating the effect of saliency detection and attention ma-
nipulation in human-robot interaction. International
Journal of Social Robotics, 5(1):139–152.
Seo, H. J. and Milanfar, P. (2009). Static and space-time
visual saliency detection by self-resemblance. Journal
of vision, 9(12):15–15.
Shao, Z., Wang, L., Wang, Z., Du, W., and Wu, W.
(2019). Saliency-aware convolution neural network
for ship detection in surveillance video. IEEE Trans-
actions on Circuits and Systems for Video Technology,
30(3):781–794.
Shi, J., Yan, Q., Xu, L., and Jia, J. (2015a). Hierarchical im-
age saliency detection on extended cssd. IEEE trans-
actions on pattern analysis and machine intelligence,
38(4):717–729.
Shi, X., Chen, Z., Wang, H., Yeung, D.-Y., Wong, W.-K.,
and Woo, W.-c. (2015b). Convolutional lstm network:
A machine learning approach for precipitation now-
casting. Advances in neural information processing
systems, 28.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Song, H., Wang, W., Zhao, S., Shen, J., and Lam, K.-M.
(2018). Pyramid dilated deeper convlstm for video
salient object detection. In Proceedings of the Euro-
pean conference on computer vision (ECCV), pages
715–731.
Sun, M., Zhou, Z., Hu, Q., Wang, Z., and Jiang, J. (2018).
Sg-fcn: A motion and memory-based deep learning
model for video saliency detection. IEEE transactions
on cybernetics, 49(8):2900–2911.
Tang, Y., Zou, W., Jin, Z., and Li, X. (2018). Multi-scale
spatiotemporal conv-lstm network for video saliency
detection. In Proceedings of the 2018 ACM on Inter-
national Conference on Multimedia Retrieval, pages
362–369.
Tatler, B. W., Baddeley, R. J., and Gilchrist, I. D. (2005).
Visual correlates of fixation selection: Effects of scale
and time. Vision research, 45(5):643–659.
Tsai, D.-M. and Lai, S.-C. (2008). Independent compo-
nent analysis-based background subtraction for indoor
surveillance. IEEE Transactions on image processing,
18(1):158–167.
Vig, E., Dorr, M., and Cox, D. (2014). Large-scale opti-
mization of hierarchical features for saliency predic-
tion in natural images. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 2798–2805.
Wang, H., Xu, Y., and Han, Y. (2018a). Spotting and ag-
gregating salient regions for video captioning. In Pro-
ceedings of the 26th ACM international conference on
Multimedia, pages 1519–1526.
Wang, T., Borji, A., Zhang, L., Zhang, P., and Lu, H.
(2017a). A stagewise refinement model for detecting
salient objects in images. In Proceedings of the IEEE
international conference on computer vision, pages
4019–4028.
Wang, W. and Shen, J. (2017). Deep visual attention pre-
diction. IEEE Transactions on Image Processing,
27(5):2368–2378.
Wang, W., Shen, J., Guo, F., Cheng, M.-M., and Borji,
A. (2018b). Revisiting video saliency: A large-scale
benchmark and a new model. In Proceedings of
the IEEE Conference on computer vision and pattern
recognition, pages 4894–4903.
Wang, W., Shen, J., and Porikli, F. (2015). Saliency-aware
geodesic video object segmentation. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 3395–3402.
Wang, W., Shen, J., and Shao, L. (2017b). Video salient ob-
ject detection via fully convolutional networks. IEEE
Transactions on Image Processing, 27(1):38–49.
Wang, W., Shen, J., Yu, Y., and Ma, K.-L. (2016). Stereo-
scopic thumbnail creation via efficient stereo saliency
detection. IEEE transactions on visualization and
computer graphics, 23(8):2014–2027.
Wondimu, N. A., Buche, C., and Visser, U. (2022). Interac-
tive machine learning: A state of the art review. arXiv
preprint arXiv:2207.06196.
Xie, J., Cheng, M.-M., Ling, H., and Borji, A. (2020). Re-
visiting video saliency prediction in the deep learning
era. IEEE transactions on pattern analysis and ma-
chine intelligence.
Xie, Y. and Lu, H. (2011). Visual saliency detection based
on bayesian model. In 2011 18th IEEE Interna-
tional Conference on Image Processing, pages 645–
648. IEEE.
Yang, C., Zhang, L., Lu, H., Ruan, X., and Yang, M.-H.
(2013). Saliency detection via graph-based manifold
ranking. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 3166–
3173.
Yubing, T., Cheikh, F. A., Guraya, F. F. E., Konik, H.,
and Tr
´
emeau, A. (2011). A spatiotemporal saliency
model for video surveillance. Cognitive Computation,
3(1):241–263.
Yun, I., Jung, C., Wang, X., Hero, A. O., and Kim, J. K.
(2019). Part-level convolutional neural networks for
pedestrian detection using saliency and boundary box
alignment. IEEE Access, 7:23027–23037.
Zhang, P., Wang, D., Lu, H., Wang, H., and Ruan, X.
(2017). Amulet: Aggregating multi-level convolu-
tional features for salient object detection. In Proceed-
ings of the IEEE international conference on com-
puter vision, pages 202–211.
Zhang, P., Zhuo, T., Huang, H., and Kankanhalli, M.
(2018). Saliency flow based video segmentation via
motion guided contour refinement. Signal Processing,
142:431–440.
Zhao, T. and Wu, X. (2019). Pyramid feature attention net-
work for saliency detection. In Proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition, pages 3085–3094.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
168
