
A New Approach to Moving Object Detection and Segmentation:
The XY-shift Frame Differencing
N. Wondimu
1,4 a
, U. Visser
3 b
and C. Buche
1,2 c
1
Lab-STICC, Brest National School of Engineering, 29280, Plouzan
´
e, France
2
IRL CROSSING, CNRS, Adelaide, Australia
3
University of Miami, Florida, U.S.A.
4
School of Information Technology and Engineering, Addis Ababa University, Addis Ababa, Ethiopia
Keywords:
Moving Object Detection, Frame Differencing, Object Segmentation, XY-shift Frame Differencing, Three-
Frame Differencing.
Abstract:
Motion out-weights other low-level saliency features in attracting human attention and defining region of in-
terests. The ability to effectively identify moving objects in a sequence of frames help to solve important
computer vision problems, such as moving object detection and segmentation. In this paper, we propose a
novel frame differencing technique along with a simple three-stream encoder-decoder architecture to effec-
tively and efficiently detect and segment moving objects in a sequence of frames. Our frame differencing
component incorporates a novel self-differencing technique, which we call XY-shift frame differencing, and
an improved three-frame differencing technique. We fuse the feature maps from the raw frame and the two
outputs of our frame differencing component, and fed them to our transfer-learning based convolutional base,
VGG-16. The result from this sub-component is further deconvolved and the desired segmentation map is
produced. The effectiveness of our model is evaluated using the re-labeled multi-spectral CDNet-2014 dataset
for motion segmentation. The qualitative and quantitative results show that our technique achieves effective
and efficient moving object detection and segmentation results relative to the state-of-the-art methods.
1 INTRODUCTION
Motion is a key social stimulus that engages visual at-
tention and induces autonomic arousal in the viewer
(Williams et al., 2019; Mahapatra et al., 2008). Mo-
tion detection is extensively used in computer vision
applications to facilitate the analysis of real world
video scenes. Video surveillance (Sehairi et al., 2017)
being a significant one, monitoring traffic and pedes-
trian (Zhao et al., 2016), robot control (Motlagh et al.,
2014), target detection and counting (Garc
´
ıa et al.,
2012), and detection of human activity (Zhang et al.,
2012) are some of its applications in computer vision.
The process of relating moving region of interests
(ROI) with object/s is called moving object detec-
tion. Moving object detection concerns how to take
out moving objects from video frames and remove the
background region and noise. Robust moving object
a
https://orcid.org/0000-0002-0726-9892
b
https://orcid.org/0000-0002-1254-2566
c
https://orcid.org/0000-0003-0264-2683
detection enable computationally optimal foreground
object detection and saliency prediction (Sengar and
Mukhopadhyay, 2017).
The optical flow method use sequence of ordered
images to estimate motion of objects as either instan-
taneous image velocities or discrete image displace-
ments (Beauchemin and Barron, 1995). It is based on
the properties of flow vector of the object over time
to detect moving object regions. Optical flow method
is highly complex and susceptible to noise corruption,
fake motion and illumination variation.
On the other hand, background subtraction com-
prises of two steps: (i) background modeling and (ii)
computation of difference between the current back-
ground model and the current video frame. The per-
formance of background subtraction method is highly
dependent on the accuracy of the background model.
This method yield outstanding performance whenever
the background model is accurate; otherwise wrong
moving object detection will be undertaken (Garcia-
Garcia et al., 2020). The performance of background
subtraction technique degrades when it face videos
Wondimu, N., Visser, U. and Buche, C.
A New Approach to Moving Object Detection and Segmentation: The XY-shift Frame Differencing.
DOI: 10.5220/0011664500003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 309-318
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
309

with smaller frame rate, camera jitter, and significant
illumination change.
The other widely used moving object detection
technique is frame differencing. It detects moving
objects by taking pixel-by-pixel difference of consec-
utive frames in a video sequence. Frame differencing
is the most common and computationally less com-
plex method for moving object detection in scenarios
where the scene is dynamic due to camera movement
and mobility of objects in a video sequence. How-
ever, this method fails to detect whole relevant pixels
of some types of moving objects (foreground aperture
problem) (Xu et al., 2017). It also wrongly detects
a trailing regions as moving object (known as ghost
region) when there is an object that is moving fast
in the frames (Fei et al., 2015). Most significantly,
frame differencing fails to detect objects that preserve
uniform regions.
To this end, we propose a novel XY-shift
frame differencing technique along with three-stream
encoder-decoder architecture to address the setbacks
of frame differencing based moving object detec-
tion and segmentation techniques. The effective-
ness of our frame diffrencing technique is analyzed
both as a standalone high-pass filter algorithm and
as an input for our improved three-frame differenc-
ing and encoder-decoder network. Furthermore, we
implement three-stream encoder-decoder architecture
to build simple but robust moving object detection
model.
The rest of the paper is organized as follows. The
second part briefly introduce related research works,
the third part introduce the proposed method in detail,
the fourth part of this paper show experimental anal-
ysis of the research work, and finally, a summary of
this paper is presented.
2 RELATED WORKS
In the early days of moving object detection, re-
searchers formulated a well established background
subtraction techniques for stationary camera setting.
These techniques have been extended for many years
and are able to successfully detect moving objects as
long as the camera is stationary (Stauffer and Grim-
son, 1999; Barnich and Van Droogenbroeck, 2010;
Stauffer and Grimson, 1999; Dou et al., 2017; Cuc-
chiara et al., 2003; Bouwmans, 2012; Sengar and
Mukhopadhyay, 2017). However, a relatively long
initialization time to model the background and resid-
ual image alignment error on non-stationary camera
setting are the main setbacks of this technique (Zhang
et al., 2006). These problems are incontestably ad-
dressed by optical flow based methods (Narayana
et al., 2013; Ochs et al., 2013; Horn and Schunck,
1981). However, optical flow is highly dependent on
optical flow vectors. The quality of the these vectors
is crucial for the motion segmentation performance.
Besides, optical flow is highly complex and due to
high sensibility of noise corruption, it cannot meet the
need of real time object detection. Optical flow excep-
tionally works well on large moving objects and fails
to detect smaller objects due to blurry edges and low
resolution (Rozantsev et al., 2016).
A variety of frame differencing techniques address
the aforementioned problems. For instance, Inter-
frame differencing technique generate the difference
between two consecutive frames over a period of time
for identifying background and foreground pixels. A
research in (Liang et al., 2010) use inter-frame dif-
ferencing algorithm to detect moving target in avia-
tion video. Their experiment indicate that the algo-
rithm has few computations and high accuracy to ex-
tract moving-target in aviation videos. In (Nakashima
and Yabuta, 2018), interframe differencing and dy-
namic binarization using discriminant analysis is ap-
plied. The positions of the moving object in the image
are determined by observing the histograms of each
frame.
A slightly different method with comparable re-
sult with that of inter-frame differencing is three-
frame differencing. This method put three adjacent
frames as a group, subtracts both adjacent frames and
lets two differential results do the logical AND oper-
ation. This has been the most widely used and tradi-
tional three-frame differencing method. In (Yin et al.,
2016), traditional three-frame differencing technique
and W4 algorithms are used to detect foreground ob-
jects in the infrared video datasets. Another research,
(Sengar and Mukhopadhyay, 2016), propose a mov-
ing object detection method under static background.
The algorithm use a non-overlapping blocks of the
difference frames and calculate the intensity sum and
mean of each block.
The inter-frame differencing and three-frame dif-
ferencing techniques suffer from the foreground aper-
ture and ghosting problems due to slow-moving as
well as fast-moving foreground objects. Besides,
these methods are known for partial or splitted de-
tection of objects (Tsai and Yeh, 2013). As a result,
frame differencing techniques are prone to false posi-
tives and sometimes false negatives.
To this end, combined moving object detection
methods improved the performance of frame differ-
encing techniques. Relatively robust moving object
detection methods combine background subtraction
with frame differencing (Weng et al., 2010; Xiao
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
310

et al., 2010; Cheng and Wang, 2014; Fei et al., 2015)
or optical flow (Halidou et al., 2014; Zhang et al.,
2006; Fern
´
andez-Caballero et al., 2010).
A static background based on three-frame differ-
encing method in combination with background sub-
traction method is proposed in (Weng et al., 2010)
and (Cheng and Wang, 2014). A combination of op-
tical flow and three-frame differencing based mov-
ing object detection method is employed in (Hali-
dou et al., 2014). It use region of interest (ROI) and
multi-block local binary pattern descriptors. Another
frame differencing and optical flow based moving ob-
ject detection technique is proposed in (Fern
´
andez-
Caballero et al., 2010). Here, a thermal infrared cam-
era mounted on autonomous mobile robot is used as a
feed to the detection module.
A method for detecting moving people in the in-
door environment is proposed with the help of frame
differencing and neural network based classification
techniques (Foresti et al., 2005). This method reduce
the false alarm and provides a robust classification
with the help of a finite state automation. Similarly, a
new approach based on fuzzy adaptive resonance the-
ory, neural network with forgetting method for fore-
ground detection and background establishment in
natural scenes is proposed in (Dou and Li, 2014). On
the other hand, the frame differencing and the non-
pyramidal Lucas-Kanade approaches (Bouguet et al.,
2001) are used to detect human candidates based on
thermal signatures when the robot stops and moves.
In (Xu et al., 2017), an efficient foreground de-
tection method is proposed by combining three-frame
differencing and Gaussian mixture model. Another
research work, (Lee et al., 2013), present a moving
object detection method by combining background
subtraction, separable morphological edge detector,
and optical flow.
Recently, a more sophisticated and efficient mov-
ing object detection methods have been proposed
by intriguing improved frame differencing techniques
with deep neural network technologies. For instance,
(Ellenfeld et al., 2021) propose a deep learning based
moving object detection method. It use a Deep Con-
volutional Neural Network (DCNN) for multi-modal
motion segmentation. Improved three-frame differ-
encing and current RGB frame is used to capture
temporal information and appearance of the current
scene respectively. These inputs are later fused in the
DCNN component for effective, efficient and robust
motion segmentation. This model improved the per-
formance of three-frame differencing techniques in
detecting tiny moving objects.
A research work in (Yang et al., 2017) applied
a frame differencing technique with Faster Region-
Convolutional Neural Network (R-CNN) for highly
precise detection and tracking characteristics. Sim-
ilarly, (Mohtavipour et al., 2022) propose a multi-
stream CNN and frame differencing based moving
object detection method for deep violence detection.
It use a handcrafted features related to appearance,
speed of movement, and representative image and fed
to a convolutional neural network (CNN) as spatial,
temporal, and spatiotemporal streams.
Furthermore, (Siam et al., 2018) and (Wang et al.,
2018) show promising results using CNN for mov-
ing object detection. They use a two-stream con-
volutional network to jointly model motion and ap-
pearance cues in a single convolutional network. In
(Wang et al., 2018) a new framework named moving-
object proposals generation and prediction framework
(MPGP) is proposed to reduce the searching space
and generate some accurate proposals which can re-
duce computational cost. In addition,they explored
the relation of moving regions in feature map of dif-
ferent layers. This method utilize spatial-temporal in-
formation to strengthen the detection score and fur-
ther adjust the location of the bounding boxes.
3 OUR APPROACH
We propose a novel moving object detection and seg-
mentation method using XY-shift and improved three-
frame differencing. Furthermore, we have extended
our method by feeding it to a three-stream encoder-
decoder network. In this section, we discuss details
of our proposed technique.
3.1 The Proposed Framework
Fig 2 show our proposed framework, consisting of
two major components namely: frame differenc-
ing and three-stream encoder-decoder network. The
frame differencing component consists of two frame
differencing methods. The first method is a novel XY-
shift frame differencing technique and the second one
is an improved three-frame differencing technique.
The XY-shift frame differencing differs a frame from
its shifted replica. The effect of this operation is
equivalent to the result of a high-pass filter method,
but with significantly smaller computational resource.
We have mainly used this method to reduce the vis-
ibility of irrelevant background objects and expose
foreground object even if they are in a temporarily
static position. The mathematical formalization of
XY-shift frame differencing is depicted as follows in
equation 1. Let a be the first channel of image A with
a shape of (h,w,3). Then, the XY-shift frame differ-
A New Approach to Moving Object Detection and Segmentation: The XY-shift Frame Differencing
311

encing of a is calculated as:
g(a) =
a(x
i
, y
j
) − a(x
i+ f
+, y
j+ f
), if i <= h − f
j <= w − f
a(x
i
, y
j
) − a(x
i− f
+, y
j− f
), if i = h or j = w
(1)
where h and w stands for the height and width of the
channel and f is a shift-factor.
Figure 1: Tabular representation of XY-shift operands.
Figure 1 depicts a notational representation of
XY-shift frame differencing. Assuming a 6X6 pixel
raw image as a minuend, the subtrahend of XY-shift
frame differencing technique with 1 shift-factor is
constructed starting from the second row and column
of the minuend.
What follows the XY-shift frame differencing is
an improved three-frame differencing technique. This
technique use the output of XY-shift differencing.
It takes three consecutive frames, compute the dif-
ference between the current frame and the previous
frame, the current frame and the next frame sepa-
rately, and extract a pixel-wise max between these
two resulting frames. This technique is adapted and
enhanced to improve the extraction of temporal fea-
tures from datasets in spatio-temporal domain. The
improved three-frame differencing method is formal-
ized as follows in equation 2. Let A,B, and C be the
first channel of three consecutive XY-shift frame dif-
ferenced frames with a shape of (h,w). Let B be the
first channel of the current frame. Then the improved
three-frame differencing, f(A,B,C), is calculated as:
f (A, B,C)
i, j
= max
i, j
(|B
i, j
− A
i, j
|, |B
i, j
−C
i, j
|) (2)
where for i,j >= 0 and i<= h and j <= w. Further-
more, the pixel-wise maximum of two images is
computed as shown in 3. Let Q1 be the absolute
difference of the current frame B and its predecessor
frame A. Let Q2 be the absolute difference of the
current frame B and its successor frame C. Let’s say
both differenced images have a size of (h,w). Then,
the pixel-wise maximum, P
m
ax, of these two frames
is calculated as:
max(Q1, Q2)
i, j
=
(
Q1
i, j
, if Q
i, j
> Q2
i, j
Q2
i, j
, if otherwise
(3)
where for i,j >= 0 and i<= h and j <= w.
The second component of our model constitutes a
VGG-16 based encoder and a decoder network. The
top five convolutional layers of VGG-16 along with
the weights of ImageNet (Simonyan and Zisserman,
2014) are used as an encoder with the intention of
avoiding excessive sparsity of hidden units.
The implementation detail is as follows. Three
consecutive raw image frames are passed to the frame
differencing component. The XY-shift frame differ-
encing component takes each frame separately and
perform XY-shift frame differencing. The result of
XY-shift frame differencing on random images is pre-
sented in figure 3 Concurrently, the improved three-
frame differencing takes all XY-Shift frame differ-
enced frames and perform three-frame differencing
for each consecutive frames using a pixel-wise maxi-
mum function, shown in equation 3.
The purpose of the XY-shift frame differencing as
depicted in column two of Fig. 3 is to clear irrelevant
background objects. This contributed a lot in reduc-
ing textures that affects the three-frame differencing
negatively. The third column of Fig. 3 clearly shows
the contribution of the XY-shift frame differencing in
enhancing three-frame differencing techniques.
Furthermore, the result of the improved three-
frame differencing, the XY-shift frame differencing,
and the raw RGB image frames is fused into one
future space using a residual layer and fed to the
last encoder-decoder network. The VGG-16 based
encoder extracts further features and the decoder
segment produces the desired segmentation map as
shown in Fig. 2.
3.2 Loss Function
Moving object detection and segmentation task is a
binary pixel-wise classification task. Consequently,
binary cross-entropy is chosen as the loss function to
evaluate the model’s performance during training.
The binary crossentropy loss function calculates
the loss as shown in equation 4:
L
BCI
= −
1
S
S
∑
i=1
y
i
. log ˆy
i
+ (1 − y
i
).(log(1 − y
i
) (4)
where ˆy
i
is the i
th
scalar value in the model output,
y
i
is the corresponding target value, and S, the out-
put size, is the number of scalar values in the model
output.
3.3 Training Protocol
We use the (Tezcan et al., 2021)’s 4-fold cross vali-
dation strategy to split between training and test data
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
312

Figure 2: Moving object detection and segmentation architecture.
of CDNet-2014. All CDNet-2014 sequences are di-
vided equally into four disjoint splits. The model is
trained on three of the splits. The remaining split is
used to evaluate the model’s performance. We used a
built-in python randomize function to select sequence
of frames in each iteration from a varity of videos. A
randomizer function is set to pick n number of frames
in each iteration where n is the batch size. In this
way we enhanced the representatives and complexity
of the data; overcoming the possibility of overfitting
at the same time. The designated training data is fur-
ther divided into a training split (90 %) and valida-
tion split (10 %). Moreover, early stopping is used to
prevent overfitting: if the validation loss does not im-
prove in two consecutive epochs, the training process
is terminated.
We used Adaptive Moment Estimation (Adam)
(Kingma and Ba, 2014) to optimize the network dur-
ing the training process. During training, the learning
rate was set to 0.0001 and was decreased by a fac-
tor of 10 every 2 epochs. The network was trained
for 10 epochs. The whole model is trained in an end-
to-end manner. The entire training procedure takes
about 8 hours using a single NVIDIA Quadro RTX
3000 Max-Q GPU.
4 EXPERIMENTS
4.1 Datasets
We use the relabeled version of CDNet-2014, (Wang
et al., 2014) dataset, for training and evaluation.
CDNet-2014 includes over 160,000 pixel-wise an-
notated frames in 53 video sequences subdivided in
11 categories and two spectra: VIS and thermal IR.
The 53 sequences contain a large variety of differ-
ent scenes with varying image quality and resolution
ranging from (320 × 240) to (720 × 480) pixels. Most
scenes show an urban environment with persons or
cars. The dataset contains both indoor and outdoor
scenes and covers many different real world chal-
lenges such as shadows, dynamic backgrounds, and
camera motion. The ground truth for each image is a
gray-scale image that describe the 4 motion classes:
static, hard shadow, unknown motion, and motion.
A New Approach to Moving Object Detection and Segmentation: The XY-shift Frame Differencing
313

Figure 3: A random presentation of XY-shift frame differenced and Three-Frame differenced frames: frames not thresholded.
An additional class is used to mark areas that are out-
side the region of interest (non-ROI). Pixels annotated
as non-ROI are discarded during evaluation.
4.2 Evaluation Metrics
We evaluate our model on the testing sets of CDNet-
2014, in total of 11 video sequences with nearly
39,820 frames. We emphasized on the Recall (Re),
Precision (Pr), and F1-score from the the standard
evaluation measures (Wang et al., 2014). This is
mainly due to the sufficiency of the selected metrics
for the problem at hand.
4.3 Frame Differencing Experiments
We undertook an ablation analysis on the different
components of our architecture. The significance
of the XY-shift frame differencing and improved
three-frame differencing is thoroughly analysed by
eliminating and replacing each of them with inter-
frame differencing (Liang et al., 2010; Nakashima
and Yabuta, 2018) and traditional frame differencing
(Yin et al., 2016; Sengar and Mukhopadhyay, 2016)
techniques. The substitution of both of these frame
differencing methods exhibit a reduced model per-
formance. Especially, elimination of our XY-shift
frame differencing technique and the use of inter-
frame differencing as a source of input for our model
caused a major performance degradation. The elim-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
314
Table 1: Quantitative comparison of results.
Approach Precision Recall F1-Score
(Bosch, 2021) 0.626 0.673 0.553
(Xiao et al., 2010) 0.462 0.513 0.42
STBGS (Bouwmans, 2012) 0.406 0.549 0.401
(Sengar and Mukhopadhyay, 2016) 0.375 0.58 0.389
(Ellenfeld et al., 2021) 0.774 0.751 0.745
Ours 0.801 0.795 0.772
ination of our frame differencing techniques signifi-
cantly reduced our model’s performance on most of
its salient features, such as robustness against false-
motion, temporarily at-rest object detection, and tiny
moving object detection.
The use of our XY-shift frame differencing tech-
nique along with the improved three-frame differ-
encing technique exhibit an outstanding performance.
This is mainly due to the power of our XY-shift
frame differencing technique in eliminating dynamic
and noisy backgrounds. Moreover, the use of XY-
shift differenced frames for three-frame differenc-
ing component further improved the performance of
our model, especially in dynamic background scene
videos. From the qualitative analysis point of view,
the absence of XY-shift frame differencing affected
our model’s performance on tiny moving objects and
temporarily at-rest foreground objects.
4.4 Optical Flow Experiments
Our second phase of ablation analysis is concerned
with the popular optical flow technique. We converted
our model into a two-stream architecture and assessed
the impact of optical flow technique. Here, we used
optical flow output and raw image as input source of
a two-stream encoder-decoder architecture. The abil-
ity of our model to detect false-negatives was slightly
compromised in this setup. We extended our model
to a three-stream network by replacing the improved
three-frame differencing segment by the optical flow
output. This setting slightly improved its performance
but with major deficiency to yield a competitive re-
sult.
4.5 Comparisons with the
State-of-the-Art
Comparing ones model with the state-of-the-art re-
quires ready-made repositories of research works that
constitute the state-of-the-art code base. It has been
difficult to find code bases of moving object detection
and segmentation research works. However, we were
able to compare our proposed model with five other
state-of-the-art methods for motion detection and seg-
mentation namely, (Bosch, 2021), (Xiao et al., 2010),
(Sengar and Mukhopadhyay, 2016), and (Ellenfeld
et al., 2021). Table X shows the quantitative results
regarding Precision, Recall, and F1-score. Our ap-
proach outperforms most of these methods by a large
margin and score a competitive result with the recent
research work that combines three-frame differencing
with DCNN (Ellenfeld et al., 2021).
The qualitative result is visualized in figure 4.
What is depicted in the first row is the ground truth set
by the CDNet-2014 dataset. The second raw show the
raw appearance images for the corresponding ground
truth. We used columns to showcase the performance
of the state-of-the-art papers and our model over these
images. Images are selected from different scene
videos to show the generalization capacity of mod-
els in different environment. The qualitative analysis
show the poor object detection and segmentation per-
formance of background subtraction and frame differ-
encing based algorithms in complex scene environ-
ment like, images with water in the background and
dynamic scenes. As it can be seen in figure 4, these
algorithms are highly prone to false positives and neg-
atives. Compared to these algorithms, our model was
able to detect both moving objects and temporarily at-
rest objects effectively and efficiently.
The most robust model that we analysed in this
section is (Ellenfeld et al., 2021). As it is discussed in
the previous sections, this model combine improved
three-frame differencing technique with appearance
frame in a two stream encoder-decoder architecture.
Compared to other deep learning based algorithms,
these model show relatively better moving object de-
tection and segmentation performance. Finally, our
qualitative and quantitative results show the efficiency
and effectiveness of our model. It has also scored
a competitive result compared to the state-of-the-art
methods. However, given the big error gap shown in
Table 1, there is still a need to further enhance meth-
ods. Exploiting robust digital image processing and
deep neural network technologies should be the focus
of our next phase of research.
A New Approach to Moving Object Detection and Segmentation: The XY-shift Frame Differencing
315
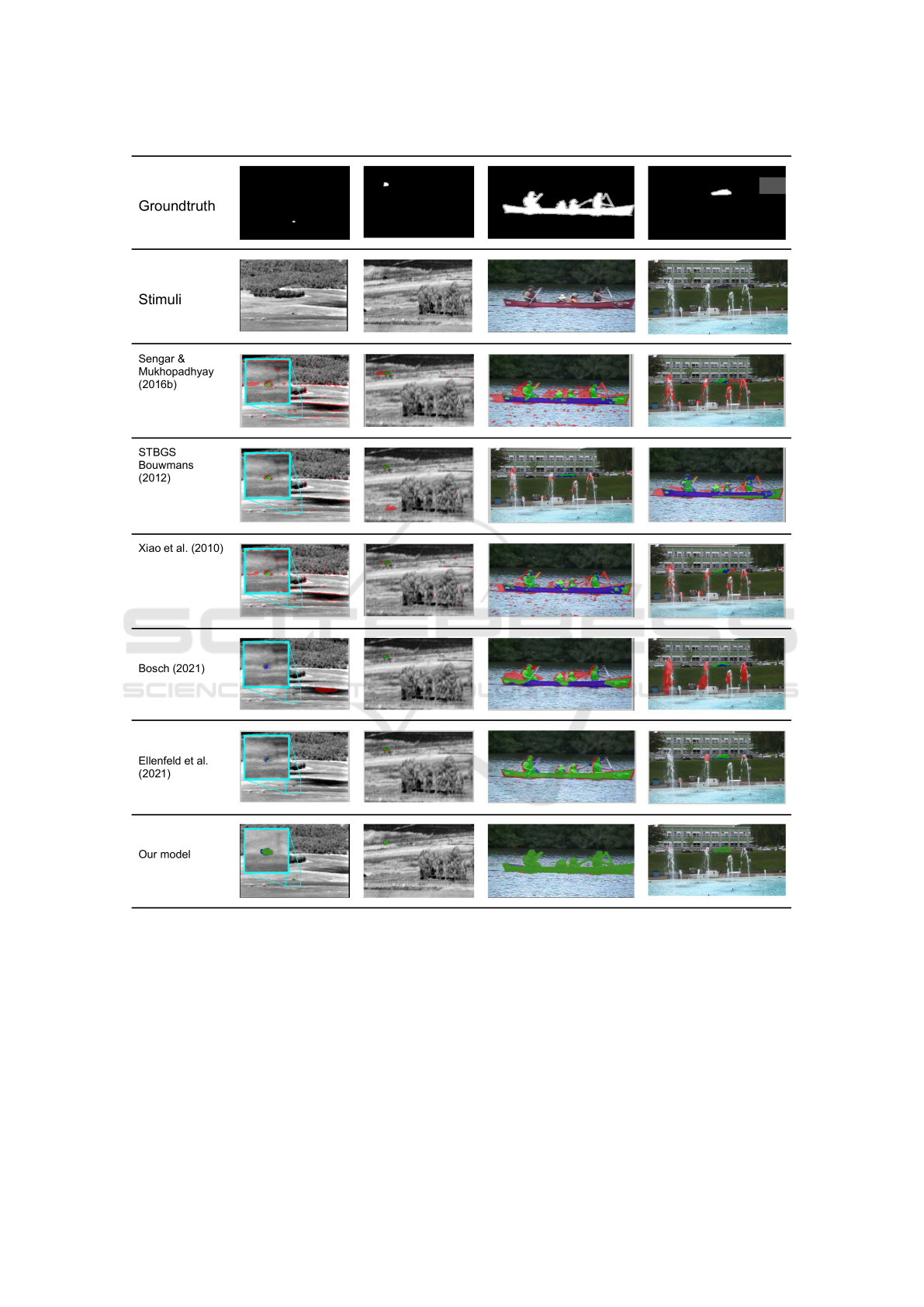
Figure 4: Qualitative evaluation of different models against our model: The green, blue, and red shades indicate the correct,
false negative, and false positive classifications.
5 CONCLUSION
We proposed a novel moving object detection and
segmentation technique. Our contribution in terms
of architectural component is two fold: we propose
a novel frame differencing technique, XY-shift frame
differencing, and enhanced the traditional three-frame
differencing technique. The XY-shift frame differenc-
ing is mainly used to sharpen the image and transform
it to a high-pass filtered frame in relatively smaller
computational resource. Image passed through this
component eliminate most types of noises and irrel-
evant background objects. Feeding the output of the
XY-shift frame differencing to the traditional three-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
316

frame differencing technique happen to overcome the
most common defects of three-frame differencing.
The performance of the the three-frame differencing
technique is improved by feeding XY-shift frame dif-
ferenced frames instead of raw image and computing
the pixel wise maximum of differences.
We have also introduced an efficient way of fusing
raw appearance images with frame differenced im-
ages resulting in a significant improvement on mov-
ing object detection and segmentation models. We
used a three-stream encoder-decoder deep neural net-
work architecture. The raw appearance image, XY-
shift frame differenced image, and three-frame differ-
enced images are fed to their corresponding stream
and later a feature space which is a deep fusion of the
three stream data is produced. This intermediate fea-
ture space is fed to the encoder, which the top 5 lay-
ers of VGG-16, and the resulting feature has been de-
convolved to get the desired segmentation map. The
CDNet-2014 change detection dataset were used to
build and analyse our model.
Our experimental analysis covered multiple per-
spectives of moving object detection and segmenta-
tion. We undertook an exhaustive ablation analysis
by replacing our proposed frame differencing compo-
nent with background subtraction, three-frame differ-
encing, and optical flow based moving object detec-
tion and segmentation techniques. For the evaluation,
we used precision, recall and F1-score metrics. Both
qualitative and quantitative results show that the pro-
posed approach outperform the state-of-the-art mov-
ing object detection and segmentation methods.
ACKNOWLEDGEMENTS
This work would not have been possible without the
financial support of the French Embassy in Ethiopia,
Brittany region administration and the Ethiopia Min-
istry of Education (MoE). We are also indebted to
Brest National School of Engineering (ENIB) and
specifically LAB-STICC for creating such a con-
ducive research environment.
REFERENCES
Barnich, O. and Van Droogenbroeck, M. (2010). Vibe: A
universal background subtraction algorithm for video
sequences. IEEE Transactions on Image processing,
20(6):1709–1724.
Beauchemin, S. S. and Barron, J. L. (1995). The computa-
tion of optical flow. ACM computing surveys (CSUR),
27(3):433–466.
Bosch, M. (2021). Deep learning for robust motion seg-
mentation with non-static cameras. arXiv preprint
arXiv:2102.10929.
Bouguet, J.-Y. et al. (2001). Pyramidal implementation of
the affine lucas kanade feature tracker description of
the algorithm. Intel corporation, 5(1-10):4.
Bouwmans, T. (2012). Background subtraction for visual
surveillance: A fuzzy approach. Handbook on soft
computing for video surveillance, 5:103–138.
Cheng, Y. H. and Wang, J. (2014). A motion image de-
tection method based on the inter-frame difference
method. In Applied Mechanics and Materials, volume
490, pages 1283–1286. Trans Tech Publ.
Cucchiara, R., Grana, C., Piccardi, M., and Prati, A. (2003).
Detecting moving objects, ghosts, and shadows in
video streams. IEEE transactions on pattern analy-
sis and machine intelligence, 25(10):1337–1342.
Dou, J. and Li, J. (2014). Modeling the background and
detecting moving objects based on sift flow. Optik,
125(1):435–440.
Dou, J., Qin, Q., and Tu, Z. (2017). Background subtraction
based on circulant matrix. Signal, Image and Video
Processing, 11(3):407–414.
Ellenfeld, M., Moosbauer, S., Cardenes, R., Klauck, U., and
Teutsch, M. (2021). Deep fusion of appearance and
frame differencing for motion segmentation. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 4339–4349.
Fei, M., Li, J., and Liu, H. (2015). Visual tracking based on
improved foreground detection and perceptual hash-
ing. Neurocomputing, 152:413–428.
Fern
´
andez-Caballero, A., Castillo, J. C., Mart
´
ınez-Cantos,
J., and Mart
´
ınez-Tom
´
as, R. (2010). Optical flow or
image subtraction in human detection from infrared
camera on mobile robot. Robotics and Autonomous
Systems, 58(12):1273–1281.
Foresti, G. L., Micheloni, C., and Piciarelli, C. (2005).
Detecting moving people in video streams. Pattern
Recognition Letters, 26(14):2232–2243.
Garc
´
ıa, J., Gardel, A., Bravo, I., L
´
azaro, J. L., Mart
´
ınez, M.,
and Rodr
´
ıguez, D. (2012). Directional people counter
based on head tracking. IEEE Transactions on Indus-
trial Electronics, 60(9):3991–4000.
Garcia-Garcia, B., Bouwmans, T., and Silva, A. J. R.
(2020). Background subtraction in real applica-
tions: Challenges, current models and future direc-
tions. Computer Science Review, 35:100204.
Halidou, A., You, X., Hamidine, M., Etoundi, R. A., Di-
akite, L. H., et al. (2014). Fast pedestrian detection
based on region of interest and multi-block local bi-
nary pattern descriptors. Computers & Electrical En-
gineering, 40(8):375–389.
Horn, B. K. and Schunck, B. G. (1981). Determining optical
flow. Artificial intelligence, 17(1-3):185–203.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Lee, S., Kim, N., Paek, I., Hayes, M. H., and Paik, J.
(2013). Moving object detection using unstable cam-
era for consumer surveillance systems. In 2013 IEEE
A New Approach to Moving Object Detection and Segmentation: The XY-shift Frame Differencing
317

International Conference on Consumer Electronics
(ICCE), pages 145–146. IEEE.
Liang, R., Yan, L., Gao, P., Qian, X., Zhang, Z., and Sun,
H. (2010). Aviation video moving-target detection
with inter-frame difference. In 2010 3rd International
Congress on Image and Signal Processing, volume 3,
pages 1494–1497.
Mahapatra, D., Winkler, S., and Yen, S.-C. (2008). Mo-
tion saliency outweighs other low-level features while
watching videos. In Human Vision and Electronic
Imaging XIII, volume 6806, pages 246–255. SPIE.
Mohtavipour, S. M., Saeidi, M., and Arabsorkhi, A. (2022).
A multi-stream cnn for deep violence detection in
video sequences using handcrafted features. The Vi-
sual Computer, 38(6):2057–2072.
Motlagh, O., Nakhaeinia, D., Tang, S. H., Karasfi, B., and
Khaksar, W. (2014). Automatic navigation of mobile
robots in unknown environments. Neural Computing
and Applications, 24(7):1569–1581.
Nakashima, T. and Yabuta, Y. (2018). Object detection
by using interframe difference algorithm. In 2018
12th France-Japan and 10th Europe-Asia Congress
on Mechatronics, pages 98–102. IEEE.
Narayana, M., Hanson, A., and Learned-Miller, E. (2013).
Coherent motion segmentation in moving camera
videos using optical flow orientations. In Proceed-
ings of the IEEE International Conference on Com-
puter Vision, pages 1577–1584.
Ochs, P., Malik, J., and Brox, T. (2013). Segmentation of
moving objects by long term video analysis. IEEE
transactions on pattern analysis and machine intelli-
gence, 36(6):1187–1200.
Rozantsev, A., Lepetit, V., and Fua, P. (2016). Detecting
flying objects using a single moving camera. IEEE
transactions on pattern analysis and machine intelli-
gence, 39(5):879–892.
Sehairi, K., Chouireb, F., and Meunier, J. (2017). Com-
parative study of motion detection methods for video
surveillance systems. Journal of Electronic Imaging,
26(2):023025.
Sengar, S. S. and Mukhopadhyay, S. (2016). A novel
method for moving object detection based on block
based frame differencing. In 2016 3rd International
Conference on Recent Advances in Information Tech-
nology (RAIT), pages 467–472. IEEE.
Sengar, S. S. and Mukhopadhyay, S. (2017). Foreground
detection via background subtraction and improved
three-frame differencing. Arabian Journal for Science
and Engineering, 42(8):3621–3633.
Siam, M., Mahgoub, H., Zahran, M., Yogamani, S., Jager-
sand, M., and El-Sallab, A. (2018). Modnet: Motion
and appearance based moving object detection net-
work for autonomous driving. In 2018 21st Interna-
tional Conference on Intelligent Transportation Sys-
tems (ITSC), pages 2859–2864.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Stauffer, C. and Grimson, W. E. L. (1999). Adaptive back-
ground mixture models for real-time tracking. In
Proceedings. 1999 IEEE computer society conference
on computer vision and pattern recognition (Cat. No
PR00149), volume 2, pages 246–252. IEEE.
Tezcan, M. O., Ishwar, P., and Konrad, J. (2021). Bsuv-net
2.0: Spatio-temporal data augmentations for video-
agnostic supervised background subtraction. IEEE
Access, 9:53849–53860.
Tsai, C.-M. and Yeh, Z.-M. (2013). Intelligent mov-
ing objects detection via adaptive frame differencing
method. In Asian Conference on Intelligent Informa-
tion and Database Systems, pages 1–11. Springer.
Wang, H., Wang, P., and Qian, X. (2018). Mpnet: An
end-to-end deep neural network for object detection
in surveillance video. IEEE Access, 6:30296–30308.
Wang, Y., Jodoin, P.-M., Porikli, F., Konrad, J., Benezeth,
Y., and Ishwar, P. (2014). Cdnet 2014: An expanded
change detection benchmark dataset. In Proceedings
of the IEEE conference on computer vision and pat-
tern recognition workshops, pages 387–394.
Weng, M., Huang, G., and Da, X. (2010). A new interframe
difference algorithm for moving target detection. In
2010 3rd international congress on image and signal
processing, volume 1, pages 285–289. IEEE.
Williams, E. H., Cristino, F., and Cross, E. S. (2019). Hu-
man body motion captures visual attention and elicits
pupillary dilation. Cognition, 193:104029.
Xiao, J., Cheng, H., Sawhney, H., and Han, F. (2010). Vehi-
cle detection and tracking in wide field-of-view aerial
video. In 2010 IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, pages
679–684. IEEE.
Xu, Z., Zhang, D., and Du, L. (2017). Moving object de-
tection based on improved three frame difference and
background subtraction. In 2017 International Con-
ference on Industrial Informatics-Computing Technol-
ogy, Intelligent Technology, Industrial Information In-
tegration (ICIICII), pages 79–82. IEEE.
Yang, Y., Gong, H., Wang, X., and Sun, P. (2017). Aerial
target tracking algorithm based on faster r-cnn com-
bined with frame differencing. Aerospace, 4(2):32.
Yin, J., Liu, L., Li, H., and Liu, Q. (2016). The infrared
moving object detection and security detection related
algorithms based on w4 and frame difference. Infrared
Physics & Technology, 77:302–315.
Zhang, Y., Kiselewich, S. J., Bauson, W. A., and Ham-
moud, R. (2006). Robust moving object detection at
distance in the visible spectrum and beyond using a
moving camera. In 2006 Conference on Computer Vi-
sion and Pattern Recognition Workshop (CVPRW’06),
pages 131–131. IEEE.
Zhang, Y., Liu, X., Chang, M.-C., Ge, W., and Chen, T.
(2012). Spatio-temporal phrases for activity recogni-
tion. In European Conference on Computer Vision,
pages 707–721. Springer.
Zhao, N., Xia, Y., Xu, C., Shi, X., and Liu, Y. (2016).
Appos: An adaptive partial occlusion segmentation
method for multiple vehicles tracking. Journal of
Visual Communication and Image Representation,
37:25–31.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
318
