
Multi-Objective Optimization of the Dynamic and Flexible Job Shop
Scheduling Problem Under Workers Fatigue Constraints
Dorsaf Aribi
2 a
, Olfa Belkahla Driss
1,2 b
and Hind Bril El Haouzi
3 c
1
Univ. Manouba, ESCT, Campus Universitaire Manouba, 2010, Tunisia
2
Univ. Manouba, ENSI, LARIA UR22ES01, Campus Universitaire Manouba, 2010, Tunisia
3
Universit
´
e de Lorraine, CNRS, CRAN, F-88000 Epinal, France
Keywords:
Dynamic Scheduling, Workers’ Fatigue, Flexible Job-Shop Rescheduling, New Job Insertion, Machine
Breakdown, Job Cancellation , Multi-Objective Optimization, NSGA-II.
Abstract:
A massive number of studies has tackled the scheduling problem, but they mainly seek to solve the classic
problem by reducing the real constraints of the environment like workers’ fatigue, which may lead to defective
production, and the occurrence of unexpected events that makes the initial scheduling obsolete. In this paper,
we study the multi-objective dynamic flexible job shop-scheduling problem under workers’ fatigue constraints
(DFJSP-WF) through three unexpected events: job insertion, machine breakdown and job cancellation. First,
a multi-objective model is established with objectives to minimize makespan and total weighted tardiness,
earliness and rejected parts due to workers’ errors, which depend on workers’ fatigue. Second, to deal with
this model, a non-dominated sorting genetic algorithm II (NSGA-II) is adapted. Computational results are
presented using three sets of well-known benchmark literature instances.
1 INTRODUCTION
Production scheduling plays an essential role in the
modern manufacturing system thanks to its great po-
tential to promote efficiency and productivity. Differ-
ent complexities often arise during production such
as machine breakdown and rush orders. The occur-
rence of these unexpected events may disrupt the orig-
inal production scheduling and hinder the realization
of scheduling objectives. The consideration of such
events makes the scheduling process dynamic and re-
quires a rescheduling (Liang and Yu, 2001). The main
aim of scheduling/rescheduling is to allow available
resources to perform a number of tasks, over a given
period of time, in the best possible way to optimize
one or more objectives with respecting the existing
constraints of the manufacturing environment (Jain
and Elmaraghy, 1997).
In such an agile environment, workers and ma-
chines complement each other to accomplish the pro-
duction. At each stage, operators play an important
role in leading and participating in the whole process
a
https://orcid.org/0000-0002-0872-413X
b
https://orcid.org/0000-0003-3077-6240
c
https://orcid.org/0000-0003-4746-5342
of production, controlling and supervising all kinds of
equipment, completing all kinds of work, and com-
municating with the environment.The human factor
plays an important role in ensuring production safety
and the success of the operation.
In this research, we tackle the Dynamic Flexible
Job Shop Scheduling Problem under Worker Fatigue
Constraint (DFJSP-WF), which is a generalization
of the classical Job shop scheduling problem (JSP).
To solve this problem, we apply a bi-objective op-
timization based on Non-dominated sorting genetic
algorithm II (NSGA-II). The two objectives studied
are the completion time (makespan) and the total
weighted tardiness, earliness and rejected pieces. The
unexpected events considered are new job arrival, job
cancellation and machine breakdown. Experimental
results are presented in order to prove the effective-
ness of the proposed algorithm.
The rest of the paper is organized as follows. Sec-
tion 2 gives a critical survey of the current literature.
In Section 3, the description and formulation of the
proposed DFJSP-WF are depicted in detail. The pro-
posed NSGA-II is introduced in Section 4. In Section
5, an example is presented to clarify the subject. To
evaluate the performance of the proposed algorithm,
comprehensive experiments are conducted and the re-
Aribi, D., Belkahla Driss, O. and El Haouzi, H.
Multi-Objective Optimization of the Dynamic and Flexible Job Shop Scheduling Problem Under Workers Fatigue Constraints.
DOI: 10.5220/0011663800003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 301-308
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
301

sults are illustrated in Section 6. Finally, concluding
remarks and future works are described in Section 7.
2 RELATED WORK
2.1 Dynamic Flexible Job Shop
Scheduling
Most scheduling problems are proved NP hard prob-
lems (Blazewicz et al., 1983). Clearly, dynamic
scheduling is more complex and challenging to solve.
Ze Tao and Xiaoxia Liu, (Tao and Liu, 2019) stud-
ied the dynamic scheduling problem of blocking job
shop constrained by machines and workers based on
genetic algorithm and simulated annealing algorithm
(GASA). The performance of the method was exam-
ined based on two cases, to be rescheduled or minor
adjusted according to their influence on the comple-
tion time, and the results show that the method pro-
posed is effective and feasible. The study of Frutos
and al. (Frutos et al., 2010) proposed a memetic al-
gorithm based on NSGA-II to solve a Bi-objective
FJSP. Authors integrated a simulated annealing stage
as a local search procedure to minimize the makespan
and the total operating cost. . (Chen et al., 2018)
also used NSGA-II to study a multi-objective dy-
namic flexible job shop scheduling problem with ma-
chine breakdown to minimize makespan and total ma-
chine workload. The performance of two reschedul-
ing strategies including transfer strategy and complete
strategy is analyzed in terms of the scheduling effi-
ciency and its stability. Earlier in 2015, (Shen and
Yao, 2015) developed a multi-objective evolutionary
algorithm (MOEA)-based proactive-reactive method
in order to capture the dynamic and multi-objective
nature of flexible job shop scheduling. Besides, Shen
constructed a new mathematical model for the multi-
objective dynamic flexible job shop scheduling prob-
lem (MODFJSP).
2.2 Fatigue in the Manufacturing
Systems
Two resources such as workers and machines are
constrained in the manufacturing process and this
problem is called Dual-resource constrained job shop
scheduling problem.
Dual-resource constrained scheduling has been
given more and more attention in recent years (Dhi-
flaoui et al., 2018) (Gong et al., 2019) (Mraihi et al.,
2022) (Farjallah et al., 2022). However, most of the
objectives studied are profit/cost oriented. Only re-
cently new models have been proposed in order to op-
timize the working conditions such as to reduce phys-
ical workload (Mossa et al., 2016). This shows an
important gap in scheduling literature where the im-
pact of scheduling decisions on human performance
and health is usually ignored (Lodree et al., 2009). To
fill this gap, a significant effort on modeling of hu-
man factors has to be made. We would focus on the
integration of one of such factors like the human ac-
cumulated fatigue in scheduling decision-making pro-
cesses.
In (Jaber et al., 2013), the authors evaluated fa-
tigue F using the model defined by the equation 1,
where R is the residual fatigue carried, λ is a fatigue
exponent specifying fatigue rate, t
n
is the production
time of the cycle i and t
i
is determined by projecting
the value of R(τ
i
) on the fatigue curve.
F
i+1
(t) = R(τ
i
) + (1 − R(τ
i
))(1 − e
−λ(t
n
−t
i
)
) (1)
In (Ferjani et al., 2017), the authors associated a
penalty coefficient d
j
to each machine j to model the
difficulty of work on that machine, such as 0 ≤ d j ≤ 1.
This coefficient d
j
expresses the speed of fatigue ac-
cumulation. The increase of fatigue ∆
i, j
generated
during a new task on machine j, between its begin-
ning t
i
and the current time t, is expressed as follows:
∆
i, j
(t
i
,t) = (1 − F
i
(t
i
))(1 − e
−d
j
(t−t
i
)
) (2)
As a consequence, from time t to t
i
, the level of fatigue
is updated as follows:
F
i
(t) = F
i
(t
i
) + ∆
i, j
(t
i
,t) (3)
(Zhang and Luo, 2020) had another vision. They pre-
sented a mathematical model of job fatigue time vary-
ing with time in the equation 4.
FT
i
= αFS[(1 + F
j
) ∗
n
∑
j=1
m
i j
∗ mod
j
], ∀i ∈ I;∀ j ∈ J
(4)
where I represents task set, I = {1,2,3,...}; J repre-
sents the set of sequence numbers, J = {1, 2, 3, ...};
m
j
represents each action element; F
j
represents the
fatigue index of each action; mod
i j
represents the
time required to complete each pose under the MOD
method in seconds; n represents the number of oc-
currences of a single action to complete a task, n =
{1,2,3...}; FS represents the fatigue state values of
workers in different time periods; FT
i
represents fa-
tigue time in seconds and α represents confidence,
(0.95 < α < 1).
3 DFJSP-WF
The DFJSP-WF considers only the flexibility of the
machine. To optimize the worker’s fatigue impact
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
302

and system productivity, the Total Weighted Tardi-
ness, Earliness and Rejected Parts (TWET RP) and
makespan (C
max
) are employed as objectives. In this
section, the description and formulation of the pro-
posed DFJSP-WF are depicted in detail.
3.1 Problem Description
The DFJSP-WF is described as follows. There is a
set of n independent jobs J = {J
1
,J
2
,. . . , J
n
}, a set of
m machines M = {M
1
,M
2
,. . . , M
m
}, and a set of m
workers W = {W
1
,W
2
,. . . ,W
m
}. A job J
i
has a se-
quence of r
i
operations {O
i1
,O
i2
,. . . , O
ir
i
} to be pro-
cessed one after another according to the precedence
constraint. Each operation O
i j
, namely, the jth oper-
ation of J
i
, must be executed on a given machine M
k
chosen from the given machine set M
i j
with a specific
processing time t
i jk
. Each machine M
k
must be oper-
ated by the given worker W
k
. Workers will experience
fatigue and recovery during production. Worker fa-
tigue accumulates during a continuous period of work
while alleviates during a continuous period of rest.
For the dynamic impact, we considered three
events: a new job arrival, a job cancellation and a ma-
chine breakdown. Each event is characterized with an
occurrence time. At each event, we are supposed to
provide a rescheduling.
For the first case, a new job arrival, rescheduling is
a necessary procedure for a flexible job shop when
newly arrived priority jobs must be inserted into
an existing schedule. In the second case, job can-
cellation, it is rescheduled if the remainder task is
heavy, otherwise, the remainder jobs will be pro-
cessed corresponding to initial scheduling. And for
the last event, machine breakdown, according to (Tao
and Liu, 2019), there are two different situations of
machine breakdown according to the fault repairing
time:
• Major fault : the fault repairing time is long ⇒ a
rescheduling is recommended
• Minor fault : the fault repairing time is short ⇒
a rescheduling becomes not necessary because it
has little effect on the completion time.
To clarify the proposed problem, the following as-
sumptions are considered:
1. Preemption of jobs is not allowed.
2. All raw material and production resources (ma-
chine and worker) are available at time 0.
3. Processing time is deterministic and predefined.
4. The worker cannot be interrupted during process-
ing.
5. Worker has no fatigue at time 0.
Table 1: Model parameters and decision variables.
Notation Description
n The number of jobs
m The number of machines/ The number
of workers
r
i
Total number of operations for job J
i
O
i j
The jth operation of job J
i
M
i j
The set of compatible machines for O
i j
t
i jk
The processing time of operation O
i j
on the machine M
k
L A big positive number
X
i jk
If the operation O
i j
is processed on
M
k
, X
i jk
= 1; otherwise, X
i jk
= 0 , i ∈
{1,2,..,n}, j ∈ {1,2,..,r
i
}, M
p
⊆ M
i j
Y
k
i j,i
′
j
′
If the operation O
i j
is processed adja-
cently before O
i
′
j
′
on M
k
, Y
k
i j,i
′
j
′
= 1;
otherwise, Y
k
i j,i
′
j
′
= 0 , i,i
′
∈ {1, 2, .., n},
j ∈ {1,2,..,r
i
}, j
′
∈ {1, 2, .., r
′
i
}, M
p
⊆
M
i j
∩ Mi
′
j
′
6. The processing routing of each job and the pro-
cessing time of each operation are known when
the job is inserted.
7. Each machine can only process one operation at a
time.
The used parameters and decision variables are listed
in Table 1.
3.2 Mathematical Model of DFJSP-WF
The first objective is to process jobs in Just-In-
Time, which means minimizing late deliveries but
also avoiding early ones. We also want to consider
the effect of such strategy on the worker and particu-
larly on his reliability. This can be formulated by eq.
(5):
TW T ERP =
n
∑
i=1
(α
1i
∗ u
i
+ α
2i
∗ e
i
+
m
∑
j=1
α
3 j
∗ r
j
) (5)
where α
1i
is the job i penalty cost per unit of time
of an early delivery, α
2i
is its penalty cost per unit
of time of a late delivery, and α
3 j
is the penalty cost
of rejected deliveries due to quality issues related to
reference j. u
i
is the tardiness period of job i, e
i
is its
earliness period, and r
j
is the number of rejected parts
due to human error after processing a job j which is
modeled using eq. (6). The parameter C is for error
Multi-Objective Optimization of the Dynamic and Flexible Job Shop Scheduling Problem Under Workers Fatigue Constraints
303

Figure 1: Fatigue evolution during jobs processing.
calibration. θ
j
designates the tasks difficulty. Both C
and θ
j
are estimated using a mapping with data pro-
vided by the Human Error Assessment and Reduction
Technique (HEART) (El Mouayni et al., 2019).
r
j
(t) = CF
θ
j
t
(6)
Following the recommendations of the literature,
it is assumed that general fatigue is governed by an
exponential distribution. Thus, the fatigue index be-
tween two successive period t and t + 1 is modeled
using eq. (7) :
F
t+1
= w
t
(1 − (1 − F
t
)e
−λ
k
) + (1 − w
t
)F
t
e
−µ
k
(7)
where F
t
is a float designating the fatigue index (0 ≤
F ≤ 1) at the end of the period t ∈ [0,T − 1], T is an
integer designating the scheduling horizon. λ
k
is the
fatigue rate when processing a job k. The parameter
µ
k
is the recovery rate after processing a job k. The pa-
rameter w
t
designates the worker’s state. It is equal to
1 if worker is busy, 0 if idle. Depending on the sched-
ule, the worker may have some rest windows to re-
cover from fatigue. Similarly, periods with intensive
work may occur leading to excessive fatigue and error
probability raise as shown in Figure 1. On the other
hand, job put-off due to fatigue recovery may lead to
delivery tardiness. Therefore, a trade-off should be
found.
The second objective of makespan (C
max
) is modeled
as the matter of routine and the formulation is shown
as eq. (8).
C
max
= max
i, j
{C
i j
} , i ∈ {1,2,. . . ,n}, j ∈ {1,2,. . . ,m}
(8)
In order to solve the problem in hand, a bi-objective
model is formulated as follows:
minimize
f
1
= TW T ERP
f
2
= C
max
(9)
Subject to:
C
i( j+1)
≥ C
i j
+
m
∑
k=1
t
i( j+1)k
X
i( j+1)k
,
i ∈ {1, 2, .., n}, j ∈ {1, 2, .., r
i
}
(10)
C
i( j+1)
+ (1 −Y
p
i j,i
′
j
′
)L ≥ C
i j
+
m
∑
k=1
t
i
′
j
′
k
X
i
′
j
′
k
,
i,i
′
∈ {1, 2, .., n}, j ∈ {1, 2, .., r
i
},
j
′
∈ {1, 2, .., r
′
i
}, p ∈ 1,2,..m
(11)
m
∑
k=1
X
i jk
= 1 , i ∈ {1, 2, .., n}, j ∈ {1, 2, .., r
i
}
(12)
Y
p
i j,i
′
j
′
Y
p
i
′
j
′
,i j
= 0 ,
i,i
′
∈ {1, 2, .., n}, j ∈ {1, 2, .., r
i
},
j
′
∈ {1, 2, .., r
′
i
},M
p
⊆ M
i j
∩ M
i
′
j
′
(13)
(1 − X
i jp
X
i
′
j
′
p
)Y
p
i j,i
′
j
′
= 0 ,
i,i
′
∈ {1, 2, .., n}, j ∈ {1, 2, .., r
i
},
j
′
∈ {1, 2, .., r
′
i
},M
p
⊆ M
i j
∩ M
i
′
j
′
(14)
The constraint (10) guarantees the precedence re-
lation of job operations. Constraint (11) indicates that
a machine can process only one operation at a time.
Constraint (12) ensures that each operation should
only be processed once. Constraint (13) avoids the
conflicted sequence of operations assigned to a ma-
chine. Constraint (14) is network constraint of the de-
cision variables X and Y , which avoid the conflicted
values between them.
4 NSGA-II FOR DFJSP-WF
The NSGA-II procedure is one of the popularly
used EMO procedures which attempt to find multi-
ple Pareto-optimal solutions for a multi-objective op-
timization problem and has the following three fea-
tures: an elitist principle, an explicit diversity pre-
serving mechanism and non-dominated solutions to
be emphasized.
4.1 Coding and Decoding
Let’s consider that we have to schedule 4 jobs com-
posed respectively by {3,3,2,3} operations. The op-
eration sequence should be encoded in the chromo-
some. The individual is constituted of a random per-
mutation of 1 to the number of operations (11 in our
case). With a simple mathematical equation, each
chromosome is transformed to the job number as il-
lustrated in figure 2.
10 6 5 11 1 3 2 7 8 4 9
⇓ Decoding
4 2 2 4 1 1 1 4 3 2 3
O
41
O
21
O
22
O
42
O
11
O
12
O
13
O
43
O
31
O
23
O
32
Figure 2: Coding and decoding procedure.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
304
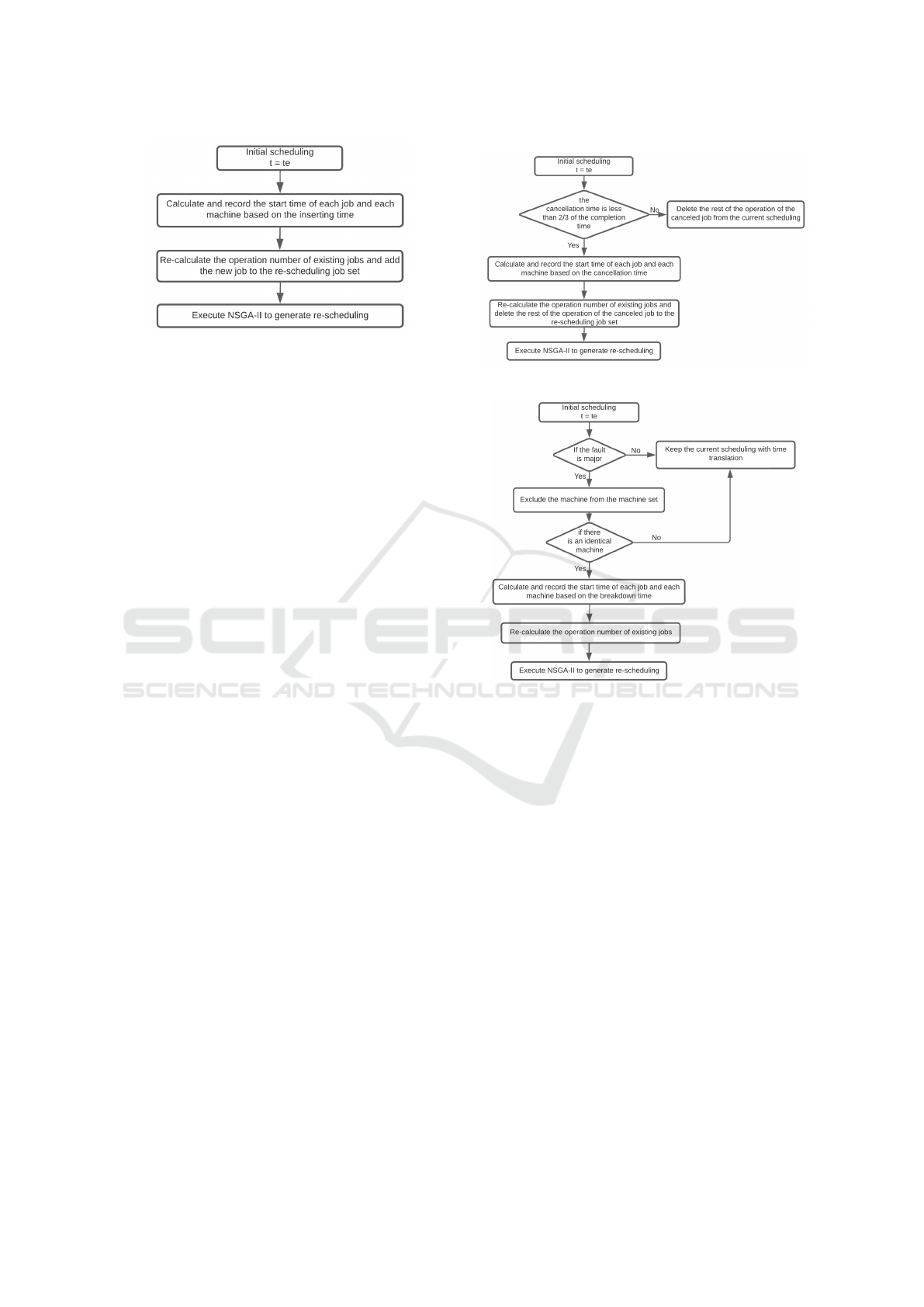
Figure 3: Re-scheduling process after new job arrival.
4.2 Evolutionary Operators of NSGA-II
Two-point crossover operator is used where two
crossover points are picked randomly from the par-
ent chromosomes. The bits in between the two points
are swapped between the parent organisms. The re-
pairment phase is to adjust the appearance time of the
jobs after crossover to guarantee the feasibility of the
solution.
For the mutation, partial transfer mutation operator is
applied. Mutation is a genetic operator used to main-
tain diversity from one generation to the next. The
partial transfer operator is about choosing two posi-
tions in the solution. The gene in the first position
will be in the last and the genes in between are shifted
with one position.
4.3 Re-Scheduling Process
In the scenario of dynamic scheduling, it is impor-
tant to check which operations have been finished and
which operations have not been processed or are be-
ing processed but are incomplete at time t when the
dynamic events occur. The re-scheduling process for
these events is described in the next three sections.
4.3.1 New Job Insertion
At an instant t
e
, a new job arrive so, a re-scheduling
is needed. We start by listing the unprocessed oper-
ations then we add the operations of the new job and
re-execute the NSGA-II to obtain a new PF. The pro-
cess is depicted in figure 3.
4.3.2 Job cancellation
When an order is canceled, we need to verify if the
cancellation time is less than 2/3 of the completion
time. If it’s the case then, a rescheduling is necessary.
The process is shown in figure 4.
Figure 4: Re-scheduling process after a job cancellation.
Figure 5: Re-scheduling process after a machine break-
down.
4.3.3 Machine Breakdown
When a machine breakdown occur, we first need to
verify if it is rather a minor or a major fault. Second,
we should verify if there is an identical machine to
replace the defaulted one. If the two conditions are
verified, then NSGA-II is executed and a new PF is
generated. The steps details are shown in figure 5.
5 ILLUSTRATIVE EXAMPLE
In this section, an illustrative example is provided to
show the efficiency of the algorithm on static and dy-
namic FJSP under worker fatigue constraint.
5.1 Static FJSP
To better understand the different steps of the al-
gorithm, we would introduce an instance IP of the
Multi-Objective Optimization of the Dynamic and Flexible Job Shop Scheduling Problem Under Workers Fatigue Constraints
305

Table 2: Job–machine information of the instance IP.
Job Operations Corresponding
machine
Processing
time
Due
date
Penalty
J1 O11 M1,M2 3,5 20 0.24
O12 M5 4
O13 M3,M4 4,6
J2 O21 M5 10 35 0.2
O22 M1,M2 5,7
O23 M3,M4 6,8
J3 O31 M3,M4 7,9 55 0.3
O32 M5 6
J4 O41 M1,M2 6,10 60 0.15
O42 M5 5
O43 M3,M4 7,8
Figure 6: GANTT chart of the optimal makespan value
equal to 25 for IP.
DFJSP-WF, presented in table 2 , that we will con-
sider for the rest of this section. The proposed in-
stance IP consists of 4 jobs, 11 operations and 5 ma-
chines. The optimal solution based on Makespan
value is presented in figure 6.
5.2 Dynamic FJSP
We considered the selected solution presented in fig-
ure 7 as the initial scheduling. Three scenarios of un-
expected events are studied in the following.
(1) New Job Arrival
At t = 15, a new order arrive. The new job data is pre-
sented in table 3. In figure 8, two solutions are repre-
sented. The first solution is selected from the Pareto
front delivered by our approach based on CR (Com-
plete Rescheduling) strategy with C
max
= 38 and the
second one is based on RS (Right-Shift) strategy with
C
max
= 46. We can obviously see that the first strategy
deliver a better result.
(2) Job Cancellation
Figure 7: GANTT chart of the selected solution for
rescheduling.
Table 3: New job arrival data.
Job Operations Corresponding
machine
Processing
time
Penalty Due
date
J5 O51 M3,M4 3,4
O52 M5 5 0.2 70
O53 M1,M2 5,4
Figure 8: GANTT charts of the rescheduling after J
5
inser-
tion with 2 strategies.
The second scenario is the cancellation of job 2 at
t = 10 and we obtain the solution with a makespan
equal to 28 that is presented in figure 9. We observe
that the makespan value is lower that the obtained in
the initial scheduling.
(3) Machine Breakdown
The last considered scenario is machine 1 breakdown
at t = 12. Machine 1 and machine 2 are identical so,
we can generate a rescheduling. One of the obtained
solutions by our approach is presented in figure 10.
6 SIMULATION AND ANALYSIS
In the proposed algorithm, there are several input pa-
rameters that we set as follow: 1) population size
N = 40; 2) crossover probability ρ
c
= 0.8; and 3) mu-
tation probability ρ
m
= 0.05. For the calculation of
fatigue rate of each worker, we consider the following
parameters: machine m difficulty rate θ
m
∈ [0.01,0.5];
error calibration C = 1; fatigue rate λ
i
∈ [0.01, 0.1]
and recovery rate µ
i
∈ [0.1,0.5] after processing job i.
The effectiveness of the NSGA-II for DFJSP under
fatigue constraint is analyzed by performing experi-
ments with static FJSP benchmarks. These instances
Figure 9: GANTT chart of rescheduling after job 2 cancel-
lation.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
306
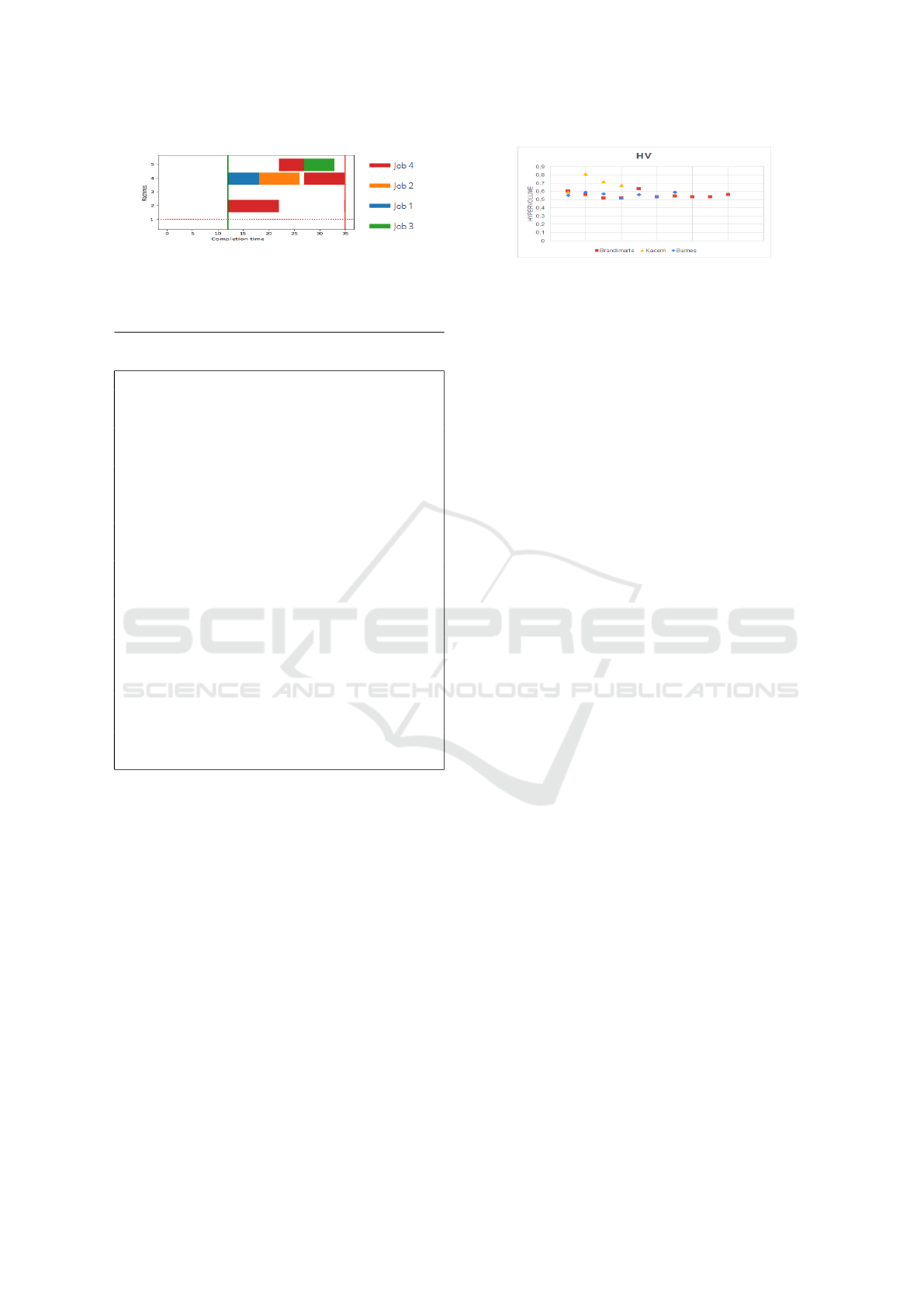
Figure 10: GANTT chart of rescheduling after machine 1
breakdown.
Table 4: Results of applying NSGA-II to benchmark in-
stances.
f1 = Cmax f2 = TWTERP
Instance n x m
min max min max
Mk01 10 x 6 68 141 210,64 329,38
Mk02 10 x 6 58 120 378,13 525,37
Mk03 15 x 8 333 550 4106,78 5025,73
Mk04 15 x 8 111 199 858,34 1161,8
Mk05 15 x 4 247 356 1055,36 1465,68
Mk06 10 x 15 183 326 904,17 1169,54
Mk07 20 x 5 265 454 2916,51 3805,47
Mk08 20 x 10 677 932 7926,86 9220,55
Mk09 20 x 10 600 857 8405,23 9648,48
Mk10 20 x 15 518 771 8988,36 10263,5
mt10c1 10 x 11 1195 2156 5317.42 7322.71
mt10cc 10 x 12 1110 2245 5849,1 8419,51
mt10x 10 x 11 1130 2118 4592,01 7116,53
mt10xx 10 x 12 1159 2052 4643.93 6781.03
mt10xxx 10 x 13 1179 2083 4676.2 6559.03
mt10xy 10 x 12 1137 2314 5034.14 7886.35
mt10xyz 10 x 13 1185 2171 3699.67 5332.56
Case1 4 x 5 16 94 1 26
Case2 10 x 7 28 197 7 62
Case3 10 x 10 22 110 16 59
Case4 10 x 15 44 188 16 94
are constructed by (Brandimarte, 1993), (Chambers
and Barnes, 1996) and (Kacem et al., 2002).
Since these instances were formulated in order to
minimize the makespan, we have to add a weight
(penalty) and a due date for each job. We make
α
1i
= α
2i
∈ U[0.01,0.25]. According to (Singer and
Pinedro, 1998), the due date of job j is set as in eq.
(15) a factor f = 1.3.
d
i
= r
i
+ ⌊ f
∑
j
max
m
(p
i jm
)⌋ (15)
The extreme objective values are listed in Table
4. To demonstrate the effectiveness of the designed
NSGA-II, we start by visualizing the PF obtained. As
shown in figure 12, the PFs shape illustrates a good
convergence and diversity. This is mainly due to the
convergence mechanisms used (ranking and elitism).
In figure 11, the Hypervolume metric evolution is
presented. We observe that HV is grater than 0.5 for
Figure 11: Hypervolume evolution relative to parameters
changing.
all instances and it reach out to 0.85 which demon-
strate the convergence and diversity of the solution
set.
7 CONCLUSION
The purpose of this study is to improve production
effectiveness by planning the appropriate production
schedule. The main objectives are to define the Dy-
namic Flexible Job Shop Scheduling Problem un-
der fatigue constraint and develop an optimization
method to minimize the amount of time required to
manufacture a set of clients’ orders with the least pos-
sible default. Job fatigue, as an integral part of human
factors engineering, has an important impact on work.
The excessive work pressure will not only result in the
workers’ resentment but will also lead to low work ef-
ficiency. For this reason, we are devoted to minimiz-
ing workers’ fatigue in order to reduce its impact on
production. The optimization methods must be prac-
tical in the sense that it can effectively deal with a
large number of operations to be scheduled on several
flexible machines. We also focused on the reschedul-
ing after the interruption of unexpected events. The
occurrence of these unexpected events may disrupt
the original production scheduling and affect the re-
alization of scheduling objectives. In this study, we
considered three types of events new job arrival, job
cancellation and machine breakdown. For each type,
we introduced a rescheduling strategy. The goal of
this study has been successfully achieved by adapting
the effective multi-objective evolutionary algorithm,
NSGA-II with different strategies for rescheduling.
The effectiveness of this algorithm has been proved
by experiments on well-known benchmarks from the
literature.
The research presented in this paper paves the way
for further exploration of exciting areas of research in
the future. We would like to extend the problem be-
yond flexibility only on machines to double-flexibility
on human and material resources. However, further
improvements to the algorithm are needed. Since
reinforcement learning (RL) has made remarkable
achievements in recent years, some RL-based ap-
Multi-Objective Optimization of the Dynamic and Flexible Job Shop Scheduling Problem Under Workers Fatigue Constraints
307
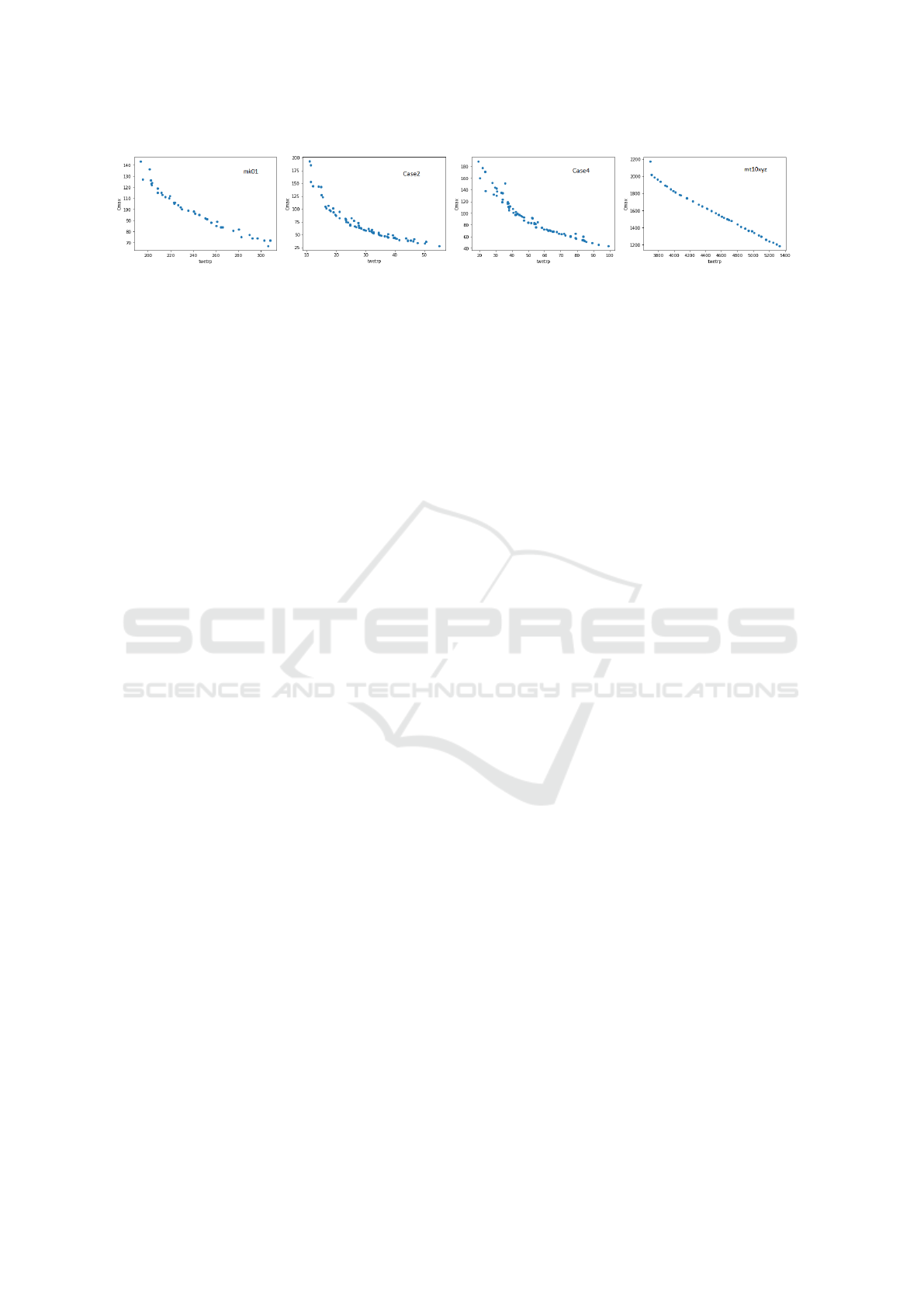
Figure 12: PF of Mk01, Case2, Case4 and mt10xyz.
proaches will be employed to enhance the perfor-
mance of existing heuristic algorithms to effectively
solve the DFJSP-WF.
REFERENCES
Blazewicz, J., Lenstra, J. K., and Kan, A. R. (1983).
Scheduling subject to resource constraints: classifica-
tion and complexity. Discrete applied mathematics,
5(1):11–24.
Brandimarte, P. (1993). Routing and scheduling in a flex-
ible job shop by tabu search. Annals of Operations
research, 41(3):157–183.
Chambers, J. B. and Barnes, J. W. (1996). Tabu search for
the flexible-routing job shop problem.
Chen, C., Ji, Z., and Wang, Y. (2018). Nsga-ii applied
to dynamic flexible job shop scheduling problems
with machine breakdown. Modern Physics Letters B,
32:1840111.
Dhiflaoui, M., Nouri, H. E., and Driss, O. B. (2018). Dual-
resource constraints in classical and flexible job shop
problems: A state-of-the-art review. volume 126,
pages 1507–1515. Knowledge-Based and Intelligent
Information & Engineering Systems: Proceedings of
the 22nd International Conference.
El Mouayni, I., Demesure, G., EL Haouzi, H., Charpentier,
P., and Siadat, A. (2019). Jobs scheduling within in-
dustry 4.0 with consideration of worker’s fatigue and
reliability using greedy randomized adaptive search
procedure. IFAC-PapersOnLine, 52:85–90.
Farjallah, F., Nouri, H. E., and Belkahla Driss, O. (2022).
Multi-start Tabu Agents-Based Model for the Dual-
Resource Constrained Flexible Job Shop Scheduling
Problem, pages 674–686. Springer International Pub-
lishing, Cham.
Ferjani, A., Ammar, A., Pierreval, H., and Elkosantini, S.
(2017). A simulation-optimization based heuristic for
the online assignment of multi-skilled workers sub-
jected to fatigue in manufacturing systems. Comput-
ers & Industrial Engineering, 112:663–674.
Frutos, M., Olivera, A., and Tohm
´
e, F. (2010). A memetic
algorithm based on a nsgaii scheme for the flexible
job-shop scheduling problem. Annals of Operations
Research, 181:745–765.
Gong, G., Chiong, R., Deng, Q., Han, W., Like, Z., Lin,
W., and Li, K. (2019). Energy-efficient flexible flow
shop scheduling with worker flexibility. Expert Sys-
tems with Applications, 141:112902.
Jaber, M., Givi, Z., and Neumann, W. (2013). Incor-
porating human fatigue and recovery into the learn-
ing–forgetting process. Applied Mathematical Mod-
elling, 37(12):7287–7299.
Jain, A. K. and Elmaraghy, H. (1997). Production schedul-
ing/rescheduling in flexible manufacturing. Interna-
tional Journal of Production Research, 35(1):281–
309.
Kacem, I., Hammadi, S., and Borne, P. (2002). Approach by
localization and multiobjective evolutionary optimiza-
tion for flexible job-shop scheduling problems. IEEE
Transactions on Systems, Man, and Cybernetics, Part
C (Applications and Reviews), 32(1):1–13.
Liang, W. and Yu, H. (2001). Learning based dynamic ap-
proach to job-shop scheduling. In 2001 International
Conferences on Info-Tech and Info-Net. Proceedings,
volume 3, pages 274–279.
Lodree, E. J., Geiger, C. D., and Jiang, X. (2009). Tax-
onomy for integrating scheduling theory and human
factors: Review and research opportunities. Interna-
tional Journal of Industrial Ergonomics, 39(1):39–51.
Mossa, G., Boenzi, F., Digiesi, S., Mummolo, G., and Ro-
mano, V. (2016). Productivity and ergonomic risk
in human based production systems: A job-rotation
scheduling model. International Journal of Produc-
tion Economics, 171:471–477.
Mraihi, T., Driss, O. B., and EL-Haouzi, H. B. (2022).
A New Variant of the Distributed Permutation Flow
Shop Scheduling Problem with Worker Flexibility,
pages 587–597. Springer International Publishing,
Cham.
Shen, X.-N. and Yao, X. (2015). Mathematical modeling
and multi-objective evolutionary algorithms applied to
dynamic flexible job shop scheduling problems. Infor-
mation Sciences, 298:198–224.
Singer, M. and Pinedro, M. (1998). A computational study
of branch and bound techniques for minimizing the to-
tal weighted tardiness in job shops. IIE Transactions,
30(2):109–118.
Tao, Z. and Liu, X. (2019). Dynamic scheduling of dual-
resource constrained blocking job shop. In Yu, H.,
Liu, J., Liu, L., Ju, Z., Liu, Y., and Zhou, D., editors,
Intelligent Robotics and Applications, pages 447–456,
Cham. Springer International Publishing.
Zhang, K. and Luo, Y. (2020). Effects of worker fatigue
on assembly line balancing. In 2020 IEEE 11th In-
ternational Conference on Software Engineering and
Service Science (ICSESS), pages 254–257.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
308
