
3D Ego-Pose Lift-Up Robustness Study for Fisheye Camera
Perturbations
Teppei Miura
1, 2
, Shinji Sako
2
and Tsutomu Kimura
1
1
Dep. of Information and Computer Engineering, National Institute of Technology Toyota College, Toyota, Aichi, Japan
2
Dep. of Computer Science, Nagoya Institute of Technology, Nagoya, Aichi, Japan
Keywords:
3D Ego-Pose Estimation, 3D Pose Lift-Up, Camera Perturbation, Robustness Study.
Abstract:
3D egocentric human pose estimations from a mounted fisheye camera have been developed following the
advances in convolutional neural networks and synthetic data generations. The camera captures different
images that are affected by the optical properties, the mounted position, and the camera perturbations caused
by body motion. Therefore, data collecting and model training are main challenges to estimate 3D ego-pose
from a mounted fisheye camera. Past works proposed synthetic data generations and two-step estimation
model that consisted of 2D human pose estimation and subsequent 3D lift-up to overcome the tasks. However,
the works insufficiently verify robustness for the camera perturbations. In this paper, we evaluate existing
models for robustness using a synthetic dataset with the camera perturbations that increases in several steps.
Our study provides useful knowledges to introduce 3D ego-pose estimation for a mounted fisheye camera in
practical.
1 INTRODUCTION
Human motion capture is widely used in society, ex.
virtual reality, augmented reality, and performance
analysis in sports science. 3D human pose estimation
in daily situations will be important to develop more
services.
Researchers have proposed many 3D human pose
estimation methods for external camera that is stati-
cally placed around the users. However, such a cam-
era setup is impractical in daily life because of limi-
tations, ex. portability, setup space and ground condi-
tion.
Wearable camera introduces 3D human pose esti-
mation from the egocentric perspective in daily situ-
ations. However, the methods capture only parts of
body due to limitation of the field of view and the
proximate setup position.
Wider angle camera estimates 3D egocentric hu-
man pose (3D ego-pose) under wider variety of mo-
tions. Xu et al. and Tome et al. equipped a single
fisheye camera around the user’s head for 3D ego-
pose estimation (Xu et al., 2019; Tome et al., 2019;
Tome et al., 2020). Miura et al. introduced an om-
nidirectional camera mounted on the user’s chest for
wider field of view (Miura and Sako, 2022). We show
their camera setups and captured images in Figure 1.
These unique camera optics and setups give rise to
a shortage of the data in training dataset for deep neu-
ral networks. Additionally, acquiring a large number
of the data, which are in-the-wild images with 2D /
3D pose annotations, for the egocentric perspective is
a time-consuming task even if it is available in a pro-
fessional motion capture system. To tackle the diffi-
culties, past works generated vast synthetic datasets
for each camera optical properties and mounted posi-
tions.
Generating synthetic data overcomes the shortage
of the training dataset, however the 3D ego-pose esti-
mation model must be trained for each camera setups.
Tome et al. and Miura et al. proposed two-step esti-
mation model that consists of 2D human pose estima-
tion and subsequent 3D lift-up to reduce the training
burden (Tome et al., 2019; Tome et al., 2020; Miura
and Sako, 2022). In particular, Miura et al.’s model
does not require to re-train the 3D lift-up model for
changing camera optical properties by applying stat-
ically obtained camera parameters, however it still
requires training for changing camera mounted posi-
tion.
The mounted fisheye camera captures different
images that are affected by the optical properties,
the mounted positions, and the camera perturbations
caused by body motion. Past works have tackled the
data shortage and the re-training burden for changing
the camera optics and positions due to propose syn-
600
Miura, T., Sako, S. and Kimura, T.
3D Ego-Pose Lift-Up Robustness Study for Fisheye Camera Perturbations.
DOI: 10.5220/0011661000003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
600-606
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
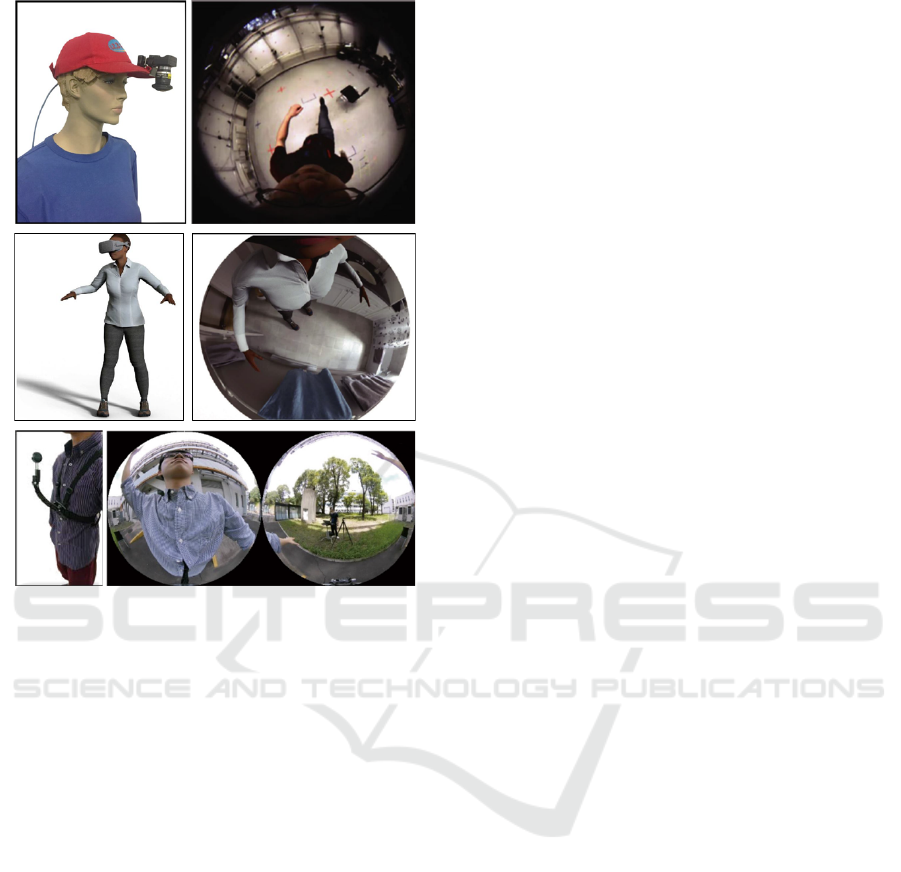
Figure 1: Camera setups and the captured images in Xu et
al. (upper), Tome et al. (middle), and Miura et al. (bottom).
thetic data generation and two-step estimation model.
However, the works insufficiently verify robustness of
3D ego-pose estimation model for the camera pertur-
bations.
We evaluate robustness of two-step 3D ego-pose
estimation models for the mounted camera perturba-
tions in this paper. We generate synthetic dataset for
training and evaluation, which increase the camera
perturbations in several steps. We train and quantita-
tively evaluate the models using the synthetic dataset.
Our study provides useful knowledge to introduce 3D
ego-pose estimation for a mounted fisheye camera in
practical. Our contributions are summarized as fol-
lows:
• We generate a synthetic dataset with incremental
camera perturbations for 3D ego-pose estimation
from a mounted fisheye camera, and it is publicly
available.
• We evaluate the camera perturbation robustness of
the 3D lift-up model in two-step 3D ego-pose es-
timations.
2 RELATED WORKS
We discuss monocular 3D human pose estimations fo-
cusing on camera setups: an external camera and a
mounted fisheye cameras perspective.
2.1 3D Human Pose Estimation with an
External Camera
Convolutional neural networks and large-scale 2D /
3D datasets have recently enabled advances in 3D
human pose estimation from images. Two main ap-
proaches have emerged in monocular 3D human pose
estimation: (1) direct regression approaches to 3D
joint positions (Tekin et al., 2016; Pavlakos et al.,
2017; Zhou et al., 2016; Mehta et al., 2017) and
(2) two-step approaches that decouple the problem
into tasks of 2D joint location estimation and subse-
quent 3D lift-up (Martinez et al., 2017; Xiaowei et al.,
2017).
In direct regression approaches, the accuracy and
generalization are severely affected by the availabil-
ity of 3D pose annotations for in-the-wild images.
Two-step decoupled approaches have two advantages:
(1) the availability of high quality existing 2D joint
location estimators that require only easy-to-harvest
2D pose annotations with images (Wei et al., 2016;
Newell et al., 2016; Xiao et al., 2018; Sun et al., 2019)
and (2) the possibility of training the 3D lift-up step
using 3D mocap datasets and their ground truth 2D
projections without images. Martinez et al. indicated
that even simple architectures solve the 3D lift-up task
with a low error rate (Martinez et al., 2017).
2.2 3D Ego-Pose Estimation with
Mounted Fisheye Cameras
In recent years, researchers proposed 3D ego-pose es-
timation for lightweight monocular fisheye camera.
Xu et al. proposed a direct regression model that esti-
mates the unit vectors and the distances towards with
3D joint positions from the camera position (Xu et al.,
2019). The 3D unit vectors are obtained by estimated
2D joint locations and an omnidirectional camera cal-
ibration toolbox (Scaramuzza et al., 2006).
Tome et al. proposed a two-step approach using
a multibranch encoder-decoder model (xR-EgoPose)
that estimates 3D joint positions from 2D joint loca-
tion heatmaps (Tome et al., 2019; Tome et al., 2020).
The model reduces the data collection and training
burden because the 3D lift-up model is separately
trainable by 3D joint positions and their ground truth
2D heatmaps without raw images. However, the 3D
3D Ego-Pose Lift-Up Robustness Study for Fisheye Camera Perturbations
601
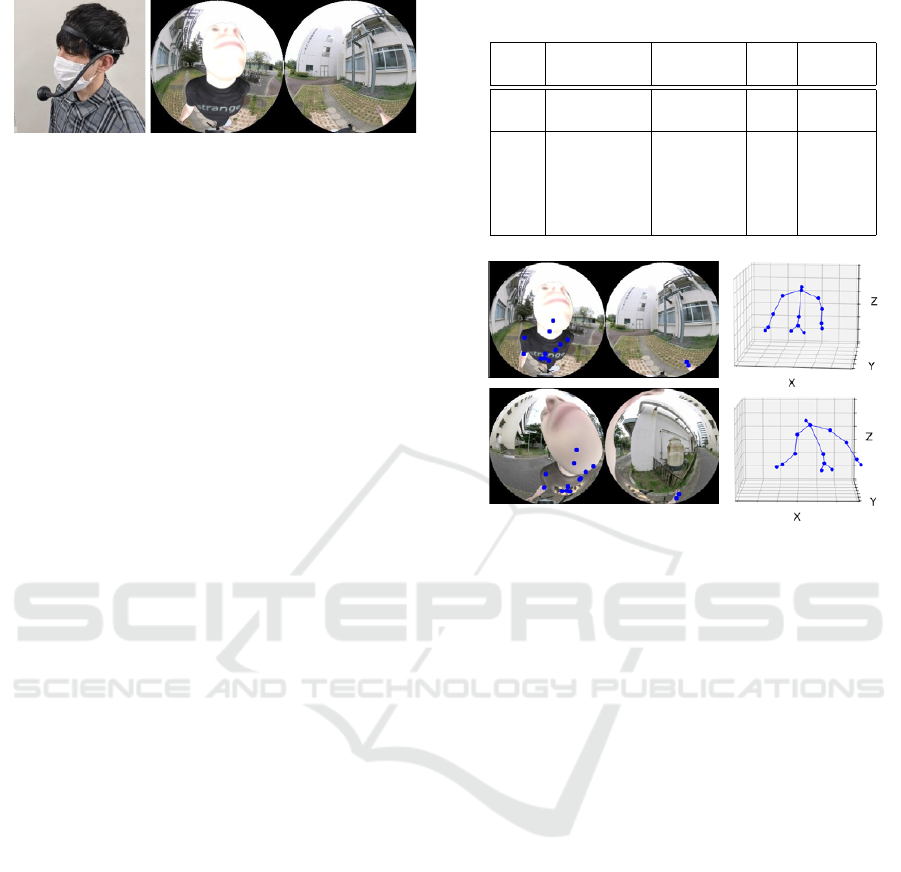
Figure 2: Camera setup and a captured image in this paper.
lift-up model still requires data re-collection and re-
training according to changes in the camera optics.
Miura et al. proposed a two-step model that de-
ploys the 3D unit vectorization module between the
2D joint location estimator and the 3D lift-up (Miura
and Sako, 2022). The 3D lift-up model does not re-
quire the data re-collection and re-training according
to changes in the camera optics because the unit vec-
torization module confines the impact of optical prop-
erties by the camera intrinsic parameters. Addition-
ally, the 3D lift-up model is trainable by 3D joint po-
sitions and their unit vectors from the camera position
in publicly available.
Above works generated large-scale synthetic
datasets to solve the problem of the shortage of the
data because of unique camera positions and optical
properties. Wang et al. proposed to estimate 3D ego-
pose with weak supervision from an external view and
collect a large in-the-wild dataset captured a mounted
fisheye camera and an external camera (Wang et al.,
2022).
Past works have tackled to reduce the data collec-
tion and training burden for the camera positions and
optical properties. However, the works insufficiently
verify robustness of 3D ego-pose estimation model
for the camera perturbations caused by body motions.
3 APPROACH
We generate synthetic dataset for training and evalua-
tion that increase the camera perturbations in several
steps, to verify robustness of two-step 3D ego-pose
estimation models. We introduce a single mounted
omnidirectional camera that consists of back-to-back
dual fisheye cameras in this paper. We show the cam-
era position and a captured image in Figure 2.
3.1 Synthetic Data Generation
Acquiring a large quantity of in-the-wild images with
2D / 3D pose annotations for the egocentric per-
spective with the camera perturbations is a time-
consuming task even if it is available in a professional
motion capture system. To alleviate this problem, we
Table 1: Synthetic training and evaluation datasets with the
camera perturbations.
background pos. rot. num. of
image (σ
2
) (σ
2
) data
train
indoor: 40
17.50 mm 10
◦
8,186
outdoor: 40
eval.
0.00 mm 0
◦
2,088
indoor: 14 8.75 mm 5
◦
outdoor: 10 17.50 mm 10
◦
26.25 mm 15
◦
35.00 mm 20
◦
Figure 3: Synthetic image examples with ground truth 2D
/ 3D pose annotations. These examples are generated by
identical CMU mocap data but applyed different perturba-
tions. (upper) position σ
2
= 0.00 cm, rotation σ
2
= 0
◦
.
(bottom) position σ
2
= 35.00 cm, rotation σ
2
= 20
◦
.
generate synthetic images with ground truth 2D / 3D
pose annotations in our unique setup.
We render a synthetic human body model from
a virtual mounted camera perspective. To acquire a
large variety of motions, we build the dataset based
on the large-scale synthetic human dataset SURREAL
(Varol et al., 2017). We animate the human model
using SMPL body model (Loper et al., 2015) with
sampled motions from CMU MoCap dataset. Body
textures are randomly chosen from the texture dataset
provided by SURREAL.
To generate realistic images, we simulate the cam-
era and background in a real-world scenario. The
virtual camera is placed at a similar position as our
setup. The camera randomly perturbates the posi-
tion and rotation in each rendering. We apply the in-
trinsic camera parameters obtained by the real cam-
era using the omnidirectional camera calibration tool-
box (Scaramuzza et al., 2006). The rendered images
are augmented with the backgrounds randomly cho-
sen from 54 indoor and 50 outdoor images.
Our synthetic dataset contains ground truth 2D /
3D pose annotations that are easily generated to use
the 3D joint positions and calibration toolbox. We ac-
quire the following 14 body joints: head, neck, spine,
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
602
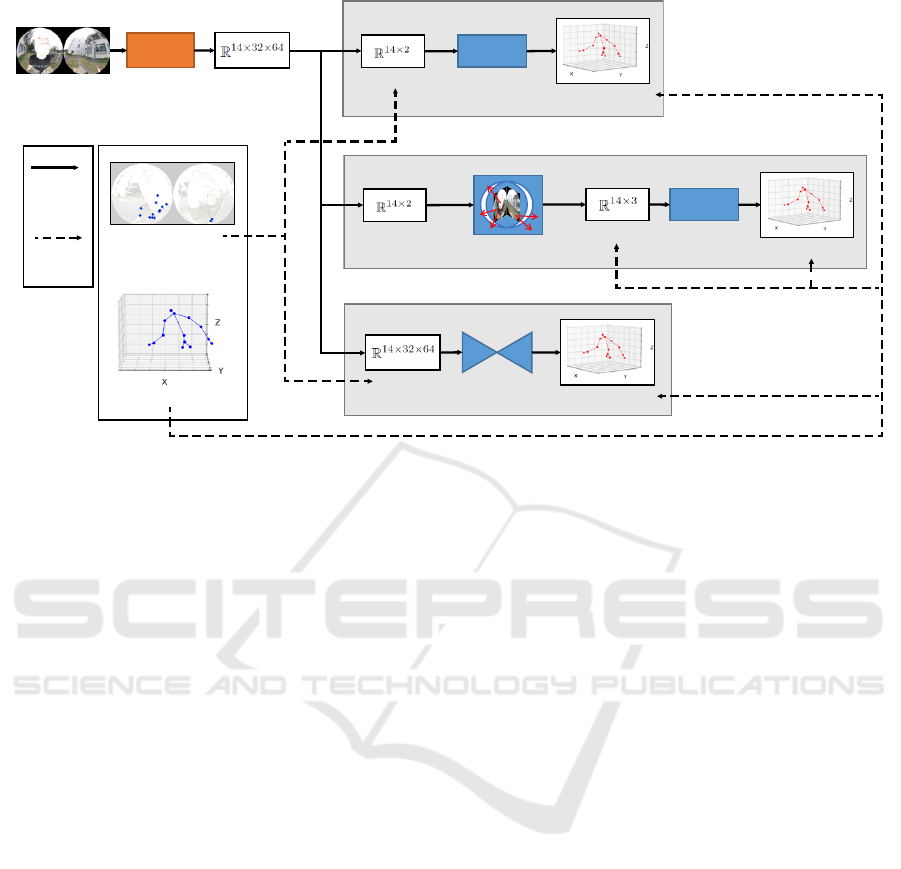
encoder-decoder
network
3D joint positions
Heatmaps
Tome et al.
Evaluation
flow
Training
data usage
Synthetic Training Dataset
3D joint positions
2D joint locations
feed-forward
network
2D joint locations
3D joint positions
Martinez et al.
feed-forward
network
3D unit vectors
3D joint positions
3D unit vectorization
2D joint locations
Miura et al.
2D joint location
estimator
Heatmaps
Input images
Figure 4: Whole process of two-step 3D ego-pose estimation models. The 3D lift-up models obtain each input from the first
step 2D joint location estimator output. Note that Miura et al.’s model require only 3D joint positions for training data.
pelvis, hips, shoulders, elbows, wrists, and hands.
The 3D joint positions are incorporated into the cam-
era coordinate system, where we normalize the skele-
ton scale in shoulder width is 350 mm.
We apply different CMU MoCap data, body tex-
tures, background images, and the camera perturba-
tions between the training and evaluation datasets.
In the training dataset, the camera moves the posi-
tion in 3D space according to a normal distribution
N(σ
2
= 17.50 mm) and rotates according to N(σ
2
=
10
◦
), which is XYZ Euler angle. In the evaluation
dataset, we change the camera perturbations of po-
sition (σ
2
= 0.00 mm to 35.00 mm) and rotation
(σ
2
= 0
◦
to 20
◦
) in 5 steps. We collect 8,186 train-
ing data and 2,088 evaluation data for each perturba-
tion. We indicate the synthetic dataset in Table 1 and
Figure 3.
3.2 3D Ego-Pose Estimation Models
We verify the camera perturbation robustness for two-
step 3D ego-pose estimation models (Martinez et al.,
2017; Miura and Sako, 2022; Tome et al., 2019; Tome
et al., 2020). The two-step models reduce the data col-
lection and training burden because of the availability
of existing 2D joint location estimators and the possi-
bility of training the 3D lift-up model using 3D mocap
datasets without images.
Martinez et al. proposed a simple feed-forward
network model to estimate 3D joint positions from 2D
joint locations. Miura et al. proposed to deploy a 3D
unit vectorization module that converts 2D joint loca-
tions to 3D unit vectors between 2D joint location es-
timator and 3D lift-up. Therefore, the simple network
estimates 3D joint positions from 3D unit vectors in
the camera coordinate system. Tome et al. proposed
a multibranch encoder-decoder model (xR-EgoPose)
to estimate 3D joint positions from 2D joint location
heatmaps. These 3D lift-up models require the use
of a 2D joint location estimator in the first step. We
show whole two-step models in Figure 4.
4 EVALUATION
We quantitatively evaluate the 3D lift-up models in
two-step 3D ego-pose estimations. We use the mean
joint position error (MJPE) as the evaluation metrics
in 3D space. The error is the Euclidean distance be-
tween the estimation and the ground truth of a 3D
joint position. Additionally, we also use pixelwise
mean joint location error (MJLE) in 2D plane eval-
uation metrics.
4.1 Implementation and Training
Two step approaches require the use of a 2D joint lo-
cation estimator in the first step. We build the 2D es-
timator based on MobileNet V2 with 3 deconvolution
layers (Sandler et al., 2018). The 2D estimator out-
puts 32 × 64 pixel heatmaps from synthetic images
with a resolution of 128× 256 pixels. We train the 2D
3D Ego-Pose Lift-Up Robustness Study for Fisheye Camera Perturbations
603
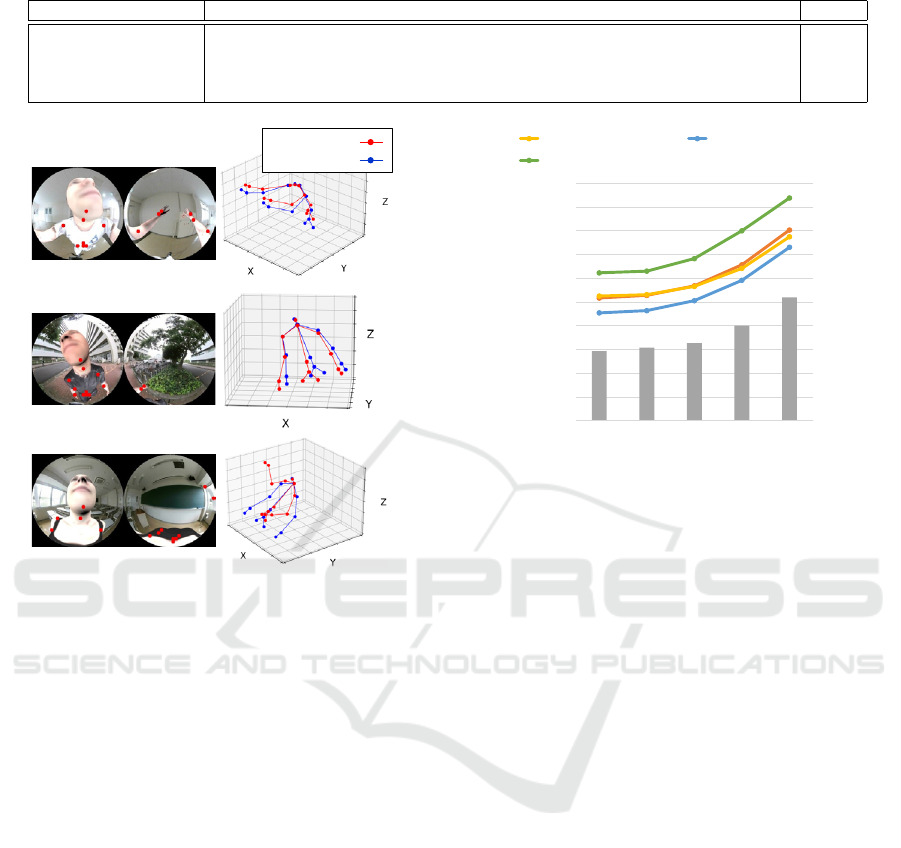
Table 2: MJPE (mm) results on the evaluation dataset (position σ
2
= 17.50 mm, rotation σ
2
= 10
◦
).
model head neck spine pelvis hips shoulders elbows wrists hands all
Martinez et al. 35.27 41.79 89.48 98.59 119.03 57.41 113.19 168.96 204.46 113.66
Miura et al. (VD loss) 81.44 61.56 74.60 86.72 102.39 66.42 109.93 163.47 197.66 113.15
Miura et al. (L2 loss) 26.55 30.82 70.83 82.84 96.58 43.36 99.19 163.91 199.44 101.14
xR-EgoPose (p3d+hm) 48.35 59.39 87.22 104.62 123.68 67.07 134.75 219.70 261.08 136.58
Es�ma�on :
Ground truth :
Figure 5: Examples of 3D pose estimation results on the
evaluation dataset. (left) Input synthetic images and 2D
joint location estimation results. (right) 3D joint position
estimation results and ground truths.
estimator with synthetic images and 2D joint location
heatmaps in training dataset. We use Adam optimizer,
the initial learning rate of 0.001, batch size of 32, and
140 epochs.
We train Martinez et al.’s lift-up model with 3D
joint positions and 2D joint locations in the training
dataset with L2 loss function. We use Adam opti-
mizer, the initial learning rate of 0.001, batch size of
32, and 140 epochs.
We train Miura et al.’s lift-up model with 3D joint
positions and their unit vectors. Miura et al. proposed
VD loss function but the proper coefficient parame-
ters are difficulty found in grid search. We evaluate
two trained models to apply each VD loss and L2
loss functions. The models are also trained under the
same optimizer, learning rate, and other conditions
with Martinez et al.’s model.
We train Tome et al.’s lift-up model (xR-EgoPose)
with 3D joint positions and 2D heatmaps generated
by 2D joint locations. In this paper, xR-EgoPose
uses dual branch, 3D joint positions and heatmaps for
loss function, because of our dataset limitations. The
training conditions are same as other models.
0
1
2
3
4
5
6
7
8
9
10
0
20
40
60
80
100
120
140
160
180
200
0.00
0
8.75
5
17.50
10
26.25
15
35.00
20
2D MJLE (pixel)
3D MJPE (mm)
Camera Perturbation (pos. mm / rot. °)
2D Estimator Martinez et al.
Miura et al. (VD loss) Miura et al. (L2 loss)
xR-EgoPose(p3d+hm)
Figure 6: Evaluation results on evaluation datasets to per-
turb position and rotation.
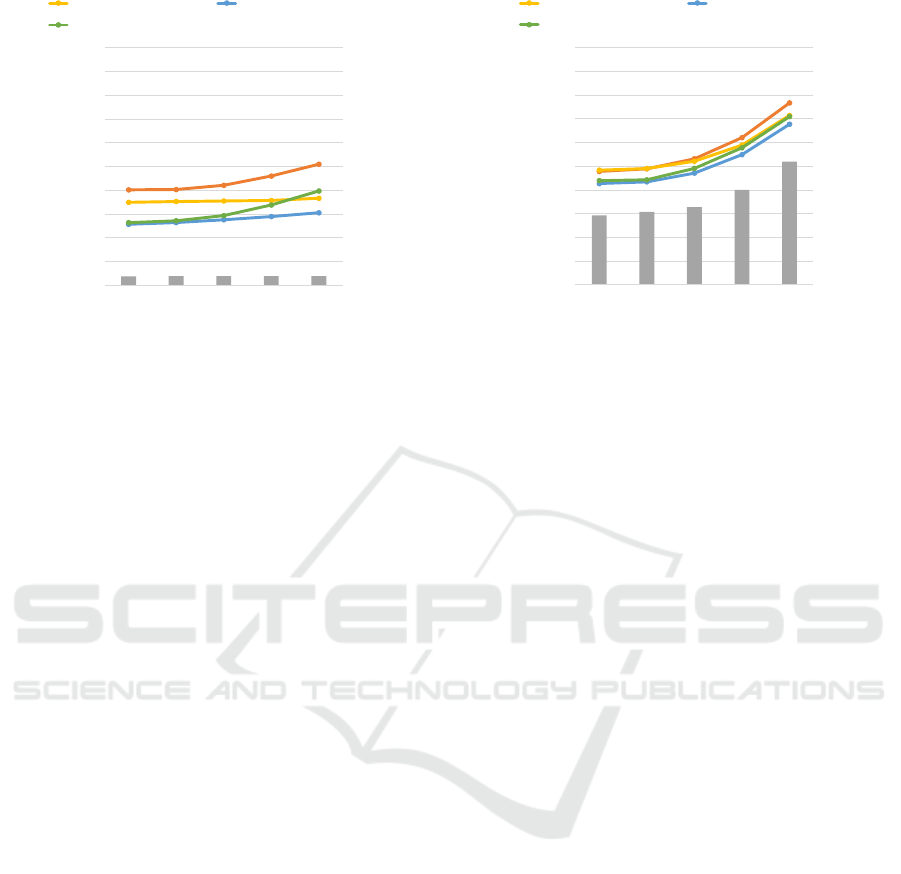
4.2 Evaluation for Perturbations
We indicate 3D lift-up model results on the evaluation
dataset (position σ
2
= 17.50 mm, rotation σ
2
= 10
◦
)
in Table 2. Miura et al.’s model (L2 loss) estimates
3D joint positions in best accuracy. We describe the
estimation result examples of Miura et al.’s model in
Figure 5. We find a failure of 3D lift-up when the
2D joint location estimator deteriorates in the bottom
example (arms and hands).
We show the mean joint position error (MJPE) on
evaluation datasets to perturb the positions and rota-
tion in Figure 6. We also show the pixelwise mean
joint location error (MJLE).
The 2D joint location estimator outputs worse es-
timation results following larger perturbations. In par-
ticular, the deterioration in accuracy is worse on eval-
uation datasets (positions σ
2
≥ 26.25 mm, rotation
σ
2
≥ 15
◦
) that are larger than training dataset. The ac-
curacy of 3D joint position estimation is worse along
with 2D estimation deterioration. Miura et al.’s lift-up
model (L2 loss) indicates better performance in accu-
racy than other models on evaluation dataset for all
perturbations.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
604
0
1
2
3
4
5
6
7
8
9
10
0
20
40
60
80
100
120
140
160
180
200
0.00
0
8.75
5
17.50
10
26.25
15
35.00
20
2D MJLE (pixel)
3D MJPE (mm)
Camera Perturbation (pos. mm / rot. °)
2D Estimator Martinez et al.
Miura et al. (VD loss) Miura et al. (L2 loss)
xR-EgoPose(p3d+hm)
Figure 7: Evaluation results for ground truth 2D joint loca-
tions on evaluation dataset.
4.3 Evaluation for Ground Truth 2D
Joint Locations
We show the 3D lift-up model results on ground truth
2D joint locations of evaluation datasets instead of 2D
joint location estimator outputs in Figure 7. Using
ground truth 2D joint locations simulates a perfect 2D
joint location estimator to evaluate just the 3D lift-up
models. 2D joint location trivial error in the figure is
raised by rounding up to convert the ground truth 2D
joint locations to pixels on 2D plane.
Miura et al.’s model (L2 loss) and xR-EgoPose
(p3d+hm) indicate similar performance in accuracy
under trained perturbations (position σ
2
≤ 17.50 mm,
rotation σ
2
≤ 10
◦
). However, Miura et al.’s model
(L2 loss) restrains performance deterioration even on
larger perturbations than the training dataset. There-
fore, Miura et al’s lift-up model has more robustness
than other models to camera perturbations of position
and rotation.
4.4 Evaluation for Training on 2D
Estimator Outputs
xR-EgoPose can learn generalization and robustness
to complex human poses by training with heatmaps
that are obtained by the 2D joint location estimator
(Tome et al., 2019; Tome et al., 2020). We train
the 3D lift-up models on ground truth 3D joint po-
sitions and 2D estimator’s outputs (heatmaps or 2D
joint locations). We show the 3D lift-up model results
and pixelwise 2D joint location error on evaluation
datasets in Figure 8.
All models improve the performance compared
with the ground truth trained model (compared with
0
1
2
3
4
5
6
7
8
9
10
0
20
40
60
80
100
120
140
160
180
200
0.00
0
8.75
5
17.50
10
26.25
15
35.00
20
2D MJLE (pixel)
3D MJPE (mm)
Camera Perturbation (pos. mm / rot. °)
2D Estimator Martinez et al.
Miura et al. (VD loss) Miura et al. (L2 loss)
xR-EgoPose(p3d+hm)
Figure 8: Evaluation results for the 3D lift-up model that
are trained on ground truth 3D joint positions and estimated
heatmaps or 2D joint locations.
Figure 6) because of learning robustness for the 2D
joint location estimator’s failure. In particular, xR-
EgoPose shows similar performance in accuracy to
Miura et al.’s model (L2 loss). However, Miura et al.’s
model still has more robustness on large perturbation.
5 CONCLUSION
We evaluated camera perturbation robustness of the
3D lift-up models in two-step 3D ego-pose estima-
tions for a mounted fisheye camera. We first gen-
erated synthetic dataset for training and evaluation,
which increase the camera perturbations in several
steps. The dataset is publicly available.
In the ground truth 2D / 3D training, Miura et al.’s
lift-up model estimated 3D ego-pose in high accuracy
for incremental camera perturbations. Additionally,
the possibility of ground truth training is great benefit
to apply two-step approach for 3D ego-pose estima-
tions in unique fisheye camera. xR-EgoPose indicated
comparable accuracy and robustness in the training on
2D estimator outputs but Miura et al.’s model still has
superiority on large camera perturbations.
In future work, we develop a 3D ego-pose esti-
mation system for a mounted omnidirectional camera
in practical. The two-step estimation model deploys
3D unit vectorization module proposed by Miura et
al., which has robustness for the camera perturbations
caused by body motions.
3D Ego-Pose Lift-Up Robustness Study for Fisheye Camera Perturbations
605

ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI
Grant Numbers JP8K18517, JP22H00661, and JST
SPRING Grant Number JPMJSP2112.
AVAILABILITY OF DATA
The datasets generated and/or analyzed dur-
ing the current study are available under
the license in the NIT-UVEC-OMNI repos-
itory https://drive.google.com/drive/folders/
1SbdaCIDhijvYdaFDdRiL NTlRwk9xc00?usp=
share link.
REFERENCES
Loper, M., Mahmood, N., Romero, J., Pons-Moll, G., and
Black, M. J. (2015). SMPL: a skinned multi-person
linear model. ACM Transactions on Graphics, 34(6).
Martinez, J., Hossain, R., Romero, J., and Little, J. J.
(2017). A Simple Yet Effective Baseline for 3d Hu-
man Pose Estimation. In IEEE International Confer-
ence on Computer Vision, pages 2659–2668.
Mehta, D., Sridhar, S., Sotnychenko, O., Rhodin, H.,
Shafiei, M., Seidel, H.-P., Xu, W., Casas, D., and
Theobalt, C. (2017). VNect: Real-time 3D Human
Pose Estimation with a Single RGB Camera. ACM
Transactions on Graphics, 36:1–14.
Miura, T. and Sako, S. (2022). Simple yet effective 3D
ego-pose lift-up based on vector and distance for a
mounted omnidirectional camera. Applied Intelli-
gence.
Newell, A., Yang, K., and Deng, J. (2016). Stacked Hour-
glass Networks for Human Pose Estimation. In Euro-
pean Conference on Computer Vision, pages 483–499.
Pavlakos, G., Zhou, X., Derpanis, K. G., and Daniilidis,
K. (2017). Coarse-to-Fine Volumetric Prediction for
Single-Image 3D Human Pose. In IEEE Conference
on Computer Vision and Pattern Recognition, pages
1263–1272.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). MobileNetV2: Inverted Resid-
uals and Linear Bottlenecks. In IEEE Conference
on Computer Vision and Pattern Recognition, pages
4510–4520, New York, NY, USA. IEEE.
Scaramuzza, D., Martinelli, A., and Siegwart, R. (2006). A
Toolbox for Easily Calibrating Omnidirectional Cam-
eras. In IEEE/RSJ International Conference on Intel-
ligent Robots and Systems, pages 5695–5701.
Sun, K., Xiao, B., Liu, D., and Wang, J. (2019). Deep High-
Resolution Representation Learning for Human Pose
Estimation. In IEEE Conference on Computer Vision
and Pattern Recognition, pages 5686–5696.
Tekin, B., Katircioglu, I., Salzmann, M., Lepetit, V., and
Fua, P. (2016). Structured Prediction of 3D Human
Pose with Deep Neural Networks. In British Machine
Vision Conference, pages 130.1–130.11.
Tome, D., Alldieck, T., Peluse, P., Pons-Moll, G., Agapito,
L., Badino, H., and la Torre, F. D. (2020). Self-
Pose: 3D Egocentric Pose Estimation from a Head-
set Mounted Camera. IEEE Transactions on Pattern
Analysis and Machine Intelligence, pages 1–1.
Tome, D., Peluse, P., Agapito, L., and Badino, H. (2019).
xR-EgoPose: Egocentric 3D Human Pose From an
HMD Camera. In The IEEE International Conference
on Computer Vision, pages 7727–7737.
Varol, G., Romero, J., Martin, X., Mahmood, N., Black,
M. J., Laptev, I., and Schmid, C. (2017). Learning
from Synthetic Humans. In IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 4627–
4635.
Wang, J., Liu, L., Xu, W., Sarkar, K., Luvizon, D., and
Theobalt, C. (2022). Estimating Egocentric 3D Hu-
man Pose in the Wild With External Weak Supervi-
sion. In IEEE Conference on Computer Vision and
Pattern Recognition, pages 13157–13166.
Wei, S.-E., Ramakrishna, V., Kanade, T., and Sheikh, Y.
(2016). Convolutional Pose Machines. In IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 4724–4732.
Xiao, B., Wu, H., and Wei, Y. (2018). Simple Baselines for
Human Pose Estimation and Tracking. In European
Conference on Computer Vision, pages 472–487.
Xiaowei, Z., Menglong, Z., Spyridon, L., and Kostas, D.
(2017). Sparse Representation for 3D Shape Estima-
tion: A Convex Relaxation Approach. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
39(8):1648–1661.
Xu, W., Chatterjee, A., Zollh
¨
ofer, M., Rhodin, H., Fua, P.,
Seidel, H.-P., and Theobalt, C. (2019). Mo2Cap2:
Real-time Mobile 3D Motion Capture with a Cap-
mounted Fisheye Camera. IEEE Transactions on
Visualization and Computer Graphics, 25(5):2093–
2101.
Zhou, X., Sun, X., Zhang, W., Liang, S., and Wei, Y. (2016).
Deep Kinematic Pose Regression. In European Con-
ference on Computer Vision, pages 186–201.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
606
