
Flow-Based Visual-Inertial Odometry for Neuromorphic Vision Sensors
Using non-Linear Optimization with Online Calibration
Mahmoud Z. Khairallah
∗ a
, Abanob Soliman
∗ b
, Fabien Bonardi
† c
, David Roussel
† d
and Samia Bouchafa
† e
Universit
´
e Paris-Saclay, Univ. Evry, IBISC Laboratory, 34 Rue du Pelvoux, Evry, 91020, Essonne, France
∗
fi fi
Keywords:
Neuromorphic Vision Sensors, Optical Flow Estimation, Visual-Inertial Odometry.
Abstract:
Neuromorphic vision sensors (also known as event-based cameras) operate according to detected variations in
the scene brightness intensity. Unlike conventional CCD/CMOS cameras, they provide information about the
scene with a very high temporal resolution (in the order of microsecond) and high dynamic range (exceeding
120 dB). These mentioned capabilities of neuromorphic vision sensors induced their integration in various
robotics applications such as visual odometry and SLAM. The way neuromorphic vision sensors trigger events
is strongly coherent with the brightness constancy condition that describes optical flow. In this paper, we
exploit optical flow information with the IMU readings to estimate a 6-DoF pose. Based on the proposed
optical flow tracking method, we introduce an optimization scheme set up with a twist graph instead of a
pose graph. Upon validation on high-quality simulated and real-world sequences, we show that our algorithm
does not require any triangulation or key-frame selection and can be fine-tuned to meet real-time requirements
according to the events’ frequency.
1 INTRODUCTION
By providing frame-free asynchronous data, event-
based cameras are designed to trigger events and re-
act to changes in brightness in the scene whenever de-
tected. These sensors are designed to mimic the activ-
ities of the biological retina and do not depend on any
artificial clock signals. The asynchronous nature of
event-based cameras enables them to suppress redun-
dant data (compared to frame-based cameras), pro-
vide high temporal resolution and high dynamic range
with low power consumption. These sensors provide
a convenient replacement for frame-based vision sen-
sors in scenarios presenting high dynamics such as
drone motion.
For the past decade, many solutions have been in-
troduced to integrate event-based cameras in robotic
applications: for instance, (Kim et al., 2008), (Mueg-
gler et al., 2014), (Rebecq et al., 2017a) and (Mueg-
gler et al., 2018) provide accurate motion estimation.
Amongst the adopted approaches to solve this prob-
lem, different probabilistic filtering methods have
a
https://orcid.org/0000-0002-0724-8450
b
https://orcid.org/0000-0003-4956-8580
c
https://orcid.org/0000-0002-3555-7306
d
https://orcid.org/0000-0002-1839-0831
e
https://orcid.org/0000-0002-2860-8128
been introduced in (Kim et al., 2008), (Kim et al.,
2016), (Weikersdorfer and Conradt, 2012) and (Weik-
ersdorfer et al., 2013). Other methods like (Mueggler
et al., 2014), (Kueng et al., 2016) and (Weikersdorfer
et al., 2014) used different optimization schemes to
benefit from their higher accuracy to estimate motion.
Event-based cameras’ ability to provide asyn-
chronous data with significantly high temporal reso-
lution leads to better continuous representation com-
pared to frame-based cameras, as well as eliminating
other problems such as motion blur and low dynamic
range. Furthermore, this ability provides a more sta-
ble mathematical modeling of the brightness con-
stancy condition, which describes the apparent pixels
motion known as the optical flow. In this paper, we
introduce, to the extent of our knowledge, the first
visual-inertial odometry algorithm that jointly opti-
mizes the events’ optical flow with the inertial mea-
surements for neuromorphic vision sensors.
2 RELATED WORK
The change in vision sensors nature proposed by
event-based cameras required a paradigm shift on
how the visual odometry problem is modeled and how
it can be solved. During the past decade, many at-
Khairallah, M., Soliman, A., Bonardi, F., Roussel, D. and Bouchafa, S.
Flow-Based Visual-Inertial Odometry for Neuromorphic Vision Sensors Using non-Linear Optimization with Online Calibration.
DOI: 10.5220/0011660400003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
963-973
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
963

tempts were introduced where some adapted the ac-
quired data from event-based cameras to suit frame-
based algorithms (Gehrig et al., 2020; Muglikar et al.,
2021) in order to create frames from event-based cam-
eras, while others reformulated the problem to fully
exploit event-based capabilities (Zhou et al., 2021;
Rebecq et al., 2017a; Rebecq et al., 2018). A novel
method was presented in (Weikersdorfer and Conradt,
2012) using a particle filter for motion tracking to es-
timate the camera’s rotation by creating mosaic im-
ages of the scene, while an extended Kalman filter is
used to refine the gradient intensity results. In (Weik-
ersdorfer et al., 2013), a particle filter is used to es-
timate the 2D motion of the used rig based on the
work presented in (Weikersdorfer and Conradt, 2012)
and a 2D map is simultaneously reconstructed. Mueg-
gler et al. (Mueggler et al., 2014) developed a 6-DoF
motion estimation for simple, uncluttered and struc-
tured environments that contain lines where the pose
is estimated by minimizing the reprojection error of
each detected line in the environment. Rebecq et al.
(Rebecq et al., 2017a) proposed an event-based track-
ing and mapping method to estimate the pose based
on image alignment by warping event images using
Lucas-Kanade method (Baker and Matthews, 2004)
and constructed the map thanks to the event-based
space-sweep presented in (Rebecq et al., 2018) to pro-
vide depth and 3D map. Kim et al. (Kim et al., 2016)
pursued their work in (Kim et al., 2008) using an ex-
tended Kalman filter to estimate pose, gradient inten-
sity and mapping implemented using a GPU.
Enhancing the robustness and accuracy of algo-
rithms using event-based cameras can be done, sim-
ilarly to frame-based cameras, by augmenting the
camera with either a different kind of sensor such
as frame-based RGB-D cameras, or another event-
based camera for stereo-vision. Censi and Scara-
muzza (Censi and Scaramuzza, 2014) provided 6-
DoF visual odometry by fusing the event-based cam-
era with a CMOS camera where only rotation was ac-
curately estimated and translation suffered from a de-
teriorated accuracy. Kueng et al. (Kueng et al., 2016)
tracked the features detected in a CMOS image frame
using the event-based camera and used a Bayesian
depth filter to estimate the depth of 2D tracked fea-
tures and obtain 3D points. These 3D points are then
used to minimize the reprojection error between 2D
features and 3D points to estimate 6-DoF pose. Weik-
ersdorfer et al. (Weikersdorfer et al., 2014) used an
extrinsically calibrated RGB-D sensor with an event-
based camera to provide an accurate transformation
of each depth value in the events’ frame and applied a
Bayesian particle filter to estimate 6-DoF pose and a
map.
Using an Inertial Measurement Unit (IMU) helps
to improve estimates provided by a monocular cam-
era to obtain accurate absolute scale. Zihao et al. (Zi-
hao Zhu et al., 2017) track features using optical-flow-
based expectation maximization to warp features and
then use the tracked features with IMU measurements
in a structure-less Kalman filter scheme for pose esti-
mation. Mueggler et al. (Mueggler et al., 2018) used
splines on a manifold for better representation of IMU
readings and minimized the geometric reprojection
and IMU error for 6-DoF pose estimation. Vidal et
al. (Vidal et al., 2018) proposed a SLAM
1
system that
combines an event-based camera, CMOS camera and
an IMU to provide an accurate scheme based on pre-
vious work (Rebecq et al., 2017b) which mainly de-
pends on feature tracking and non-linear key-frames
optimization. (Le Gentil et al., 2020) exploited the ge-
ometric structure of the environment and developed a
visual-inertial system that exploits the detected lines
instead of evens in the scene to estimate ego-motion.
State-of-the-art algorithms presented in the liter-
ature of event-based cameras vary in their approach,
estimated states, used sensors and performance. De-
spite the fact that event-based cameras adopt a mode
of operation that differs from frame-based cameras,
the introduced algorithms mainly depend on concepts
embraced for frame-based techniques such as fea-
tures extraction and key-frames optimization and tri-
angulation. Moreover, the event-based change detec-
tion model and the high temporal resolution of event-
based cameras highly improved the quality of optical
flow estimation. Although optical flow incorporates
6-DoF information (Longuet-Higgins and Prazdny,
1980; Zucchelli et al., 2002), we observe that opti-
cal flow is not fully exploited in event-based 6-DoF
estimation except for some image warping tasks (Zi-
hao Zhu et al., 2017).
In this paper, we introduce a visual-inertial odom-
etry optimization scheme that essentially depends on
optical flow information corrected using the IMU
measurements. The following Section presents Neu-
romorphic Vision and how an event is triggered.
Section 4 demonstrates how visual-inertial odometry
works and illustrates our optimization scheme. The
experimental setup required to validate our scheme is
shown in Section 5 and the obtained results in Section
6.
1
Simultaneous Localization And Mapping
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
964
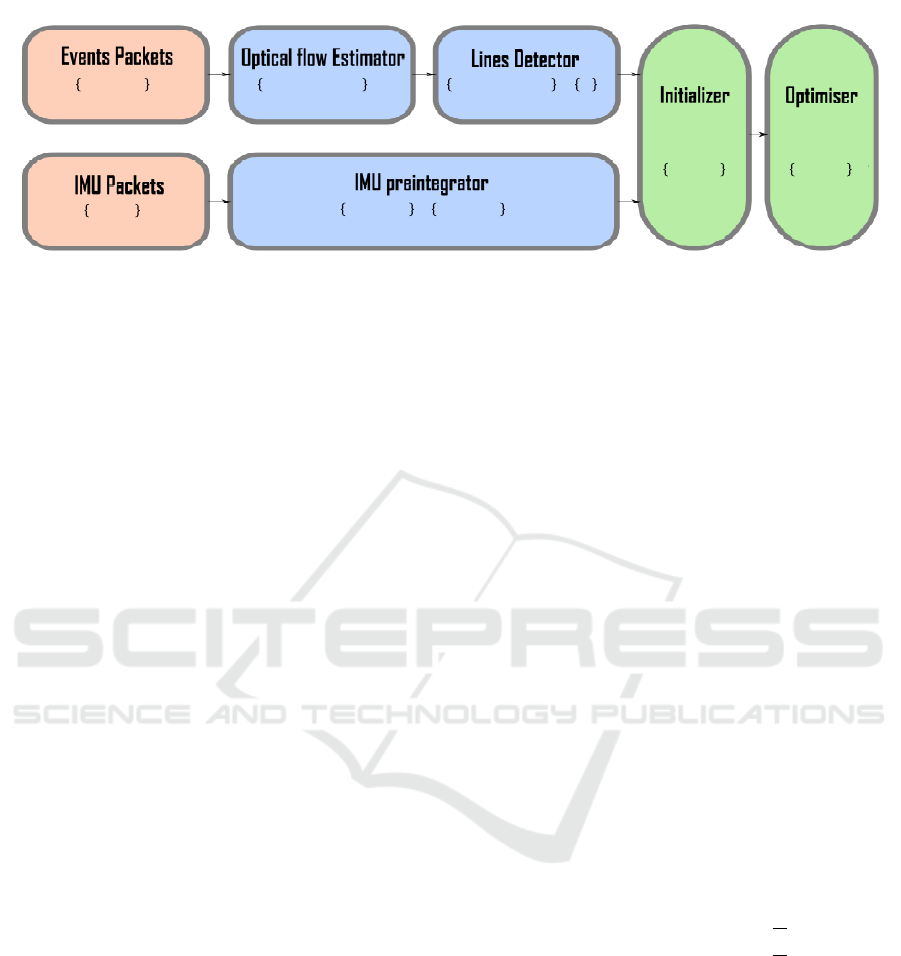
Figure 1: Optical Flow (OF) based visual-inertial odometry scheme where each block shows its expected output. In red: Raw
data, green: processed data required for optimization, blue: The optimization scheme and the initializer outputting 6-DoF
Pose, twist and line depth.
3 NEUROMORPHIC VISION
MODEL
Rather than providing complete frames at regular in-
tervals, each pixel of an event-based camera gener-
ates an asynchronous flow of events. The generated
flow is triggered whenever a change in light inten-
sity is detected. An event e
.
= {x, y, p,t} is described
by its pixel position (x, y), its polarity p ∈ {−1, 1}
and the timestamp of the event t. Whenever light
intensity variation on a pixel exceeds the threshold
δ
l
∈ [10%, 15%], an event is triggered according to
the equation:
∆L(x
i
,y
i
,t
i
) = L(x
i
,y
i
,t
i
) − L(x
i
,y
i
,t
i
− ∆t) = p
i
δ
l
,
(1)
where, for each pixel (x
i
,y
i
), L(x
i
,y
i
,t
i
) and
L(x
i
,y
i
,t
i
− ∆t) are the light intensity log at time t
i
and earlier time t
i
− ∆t. The triggered event e has a
±1 polarity based on the increase or the decrease of
light intensity ±∆L.
4 FLOW-BASED
VISUAL-INERTIAL
ODOMETRY
4.1 Preliminaries
4.1.1 Pose
Vision-based 6-DoF state estimation algorithms in-
crementally estimate a 6-DoF pose T ∈ SE(3) defined
as the rigid body transformation. A rigid body trans-
formation T
i j
expressed as a Lie group L differen-
tiable on manifold with the Lie algebra A as its tan-
gent space at the identity is called a twist ζ
i j
. The
logarithmic map Log : L → A is used to obtain the
twist ζ
i j
of T
i j
at the identity space and its inverse
can be found using the exponential map Exp : A → L
(Chirikjian, 2011).
T
i j
=
R
i j
t
i j
0 1
, ζ
i j
=
⌊Ω
i j
⌋
×
V
i j
0 1
, (2)
where R
i j
∈ SO(3) is the rotational matrix, t
i j
∈ R
3
is the translation vector, ⌊Ω
i j
⌋
×
∈ so(3) is the skew
symmetric matrix of the angular velocity vector and
V
i j
∈ R
3
is the linear velocity vector. The vec-
tor space representing the rigid body transformation
(group and algebra) is represented by the vee operator
(.)
∨
: L,A → R
d
and is reversed by the hat operator
(.)
∧
.
4.1.2 Pinhole Model
Event-based cameras uses the pinhole model (Cy-
ganek and Siebert, 2011) (or any reprojection model
according to the used lens) to describe the 3D/2D
projection π : R
3
→ R
2
of any 3D point X
c
=
[X
c
,Y
c
,Z
c
]
T
∈ R
3
in the camera frame to a 2D point
x
c
= [x
c
,y
c
]
T
∈ R
2
on the image plane as:
π
[X
c
,Y
c
,Z
c
]
T
=
x
c
y
c
=
"
f
u
X
c
Z
c
+ c
u
f
v
Y
c
Z
c
+ c
v
#
(3)
where ( f
u
, f
v
) are the lens focal length values and
(c
u
,c
v
) are the the principal point coordinates in x
and y directions, respectively. The pinhole model is a
planar model which requires each pixel (event in our
case) to be undistorted for accurate 3D/2D projection.
4.1.3 Optical Flow Representation
Optical flow describes the pixels apparent motion
(Longuet-Higgins and Prazdny, 1980) which can
be approximated as the perspective projection of
a 3D point X
c
moving freely with linear veloc-
ity V
c
= [v
xc
,v
yc
,v
zc
]
T
and angular velocity Ω
c
=
Flow-Based Visual-Inertial Odometry for Neuromorphic Vision Sensors Using non-Linear Optimization with Online Calibration
965

[ω
xc
,ω
yc
,ω
zc
]
T
so that the point’s 3D velocity is de-
scribed as:
˙
X
c
= −(Ω
c
× X
c
+V
c
) =
˙
X
c
˙
Y
c
˙
Z
c
= −
ω
yc
Z
c
−Y
c
ω
zc
ω
zc
X
c
− Z
c
ω
xc
ω
xc
Y
c
− X
c
ω
yc
+
v
xc
v
yc
v
zc
(4)
2D point velocities (optical flow approximation) cor-
responding to the optical flow can be obtained by the
derivative of Equation (3) incorporating (4):
˙x
c
=
u
v
=
˙
X
c
Z
c
−
˙
Z
c
Z
c
x
c
=
1
Z
c
A(x
c
,y
c
)V
c
+B(x
c
,y
c
)Ω
c
(5)
where the matrices A and B are function of image
plane coordinates:
A =
− f 0 (x
c
− c
u
)
0 − f (y
c
− c
v
)
B =
(x
c
−c
u
)(y
c
−c
v
)
f
−
f +
(x
c
−c
u
)
2
f
(y
c
− c
v
)
f +
(y
c
−c
v
)
2
f
−
(x
c
−c
u
)(y
c
−c
v
)
f
−(x
c
− c
u
)
(6)
Hence, estimating the optical flow, if the twist vector
ζ
∨
c
is known, would require also knowledge about the
depth Z
c
of each point.
4.1.4 IMU Preintegration Measurements
An inertial measurement unit provides proprioceptive
information as the linear acceleration
˜
a
b
(t) and angu-
lar velocity
˜
Ω
b
(t) expressed in the body frame and
influenced by different noise sources described as:
˜
Ω
b
(t) = Ω
b
(t) + b
g
(t) + η
g
(t) (7)
˜
a
b
(t) = a
b
(t) + R
T
wb
g + b
a
(t) + η
a
(t) (8)
where η
g
(t) and η
a
(t) are the Gaussian white noise of
the IMU random walk characterised as N (0,σ
g
) and
N (0, σ
a
), respectively. Ω
b
(t) and a
b
(t) are the actual
angular velocity and linear acceleration of the IMU,
R
wb
is the rotation matrix between the body frame and
the world frame and g is the gravity vector. b
g
(t) and
b
a
(t) are the slowly varying random walk noise of the
sensors with their rates defined by:
˙
b
g
(t) = η
bg
,
˙
b
a
(t) = η
ba
(9)
where η
bg
and η
ba
are the Gaussian white noise
of the IMU biases characterised as N (0, σ
bg
) and
N (0, σ
ba
), respectively.
Estimating the states of motion from an instant i to the
instant j is done by integrating the linear acceleration
and angular velocity:
R
wb
(t
j
) =R
wb
(t
i
)Exp
Z
t
j
t
i
(
˜
Ω(τ) − b
g
(τ) − η
g
(τ))dτ
(10)
V
b
(t
j
) =V
b
(t
i
) +
Z
t
j
t
i
(R
wb
(
˜
a(τ) − b
a
(τ) − η
a
(τ)) − g)dτ
(11)
P
b
(t
j
) =P
b
(t
i
) +V
b
(t
i j
)∆t
+
Z
t
j
t
i
(R
wb
(
˜
a(τ) − b
a
(τ) − η
a
(τ)) − g) dτ
2
(12)
where R
wb
is the rotation matrix, V
b
is the velocity
vector and P
b
is the position vector. Instead of using
equations 10, 11 and 12 which would slow down op-
timization and increase estimation errors, we adopt a
preintegration representation of IMU measurements
introduced in (Lupton and Sukkarieh, 2011) and
modified for representation on manifolds in (Forster
et al., 2016) to avoid recomputation of parameters.
Preintegration provides the increments of the state
{R
wb
,V
b
,P
b
} between two time steps i and j ex-
pressed as:
∆R
wb
(t
i j
) = ∆
˜
R
wb
(t
i j
)Exp(−δφ
i j
), (13)
∆V
b
(t
i j
) = ∆
˜
V
b
(t
i j
) − δV
b
(t
i j
), (14)
∆P
b
(t
i j
) = ∆
˜
P
b
(t
i j
) − δP
b
(t
i j
), (15)
where ∆(.) represent the difference of the state be-
tween the two time steps i and j,
˜
(.) means that the
states are estimated directly from measurements with
no noise estimation, δ(.) denotes the preintegration
values of the rotation, velocity and position states in-
corporating the IMU noise propagation and defined in
the method given in (Forster et al., 2016).
4.2 Optimization Scheme
Using the optical flow for accurate motion estima-
tion is a complex problem which requires, in some
cases, decoupling the translational and rotational mo-
tion and a prior knowledge of depth (Zucchelli, 2002;
Liu et al., 2017). In a different approach, we exploit
the geometric characteristics of the environment be-
sides augmenting the optical flow with IMU measure-
ments to obtain accurate ego-motion and depth esti-
mation (see Figure 1). In order to have reliable event-
based optical flow estimation with acceptable com-
putational time, we used a PCA event-based optical
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
966

(a) (b)
Figure 2: A) Factor graph with no dropped events between
two optimization time steps, b)Factor graph where some
events are dropped. In case of dropping events, the number
of Optical Flow edges decrease, and accordingly the total
optimization time is reduced significantly.
Figure 3: A conceptional drawing of different detected lines
at different time steps with their assigned events with a
small radius around the center point. We choose only events
around the center with their optical flow to participate in the
initial depth estimation assuming small depth variation.
flow approach (Khairallah et al., 2022b) where each
event’s information becomes {x,y, p,t,u, v} with the
optical flow u and v in x and y directions.
Event-Based cameras provide signals due to
changes in the environment which would occur on
contours of objects. This makes Event-Based sensors
suitable for semi-dense SLAM and visual odometry
algorithms. We benefit from the richness of events
creating contours in structured environments to de-
tect and track lines using a flow-based line detector
(Khairallah et al., 2022a).
In our scheme, we follow a probabilistic approach
exploiting optical flow and detected lines (Furgale
et al., 2012). We obtain optimal state estimates X (t)
within a time interval of [t
0
,t
f
] using a set of measure-
ments Z(t) where the environment has the structure
S in a joint posterior estimate p(X (t)|Z(t)) with no
map or prior belief. The set of measurements consist
of measured optical flow given the position of each
event U
m
(t), the accelerometer measurements A(t)
and gyroscope measurements W (t). With no prior
belief, we try to find a maximum likelihood of mea-
surements using the estimated states as:
p(X (t)|U
m
(t),A(t), W (t))
= p(X (t)|U
m
(t))p(X (t)|A(t))p(X (t)|W (t))
(16)
where the conditional probability of Equation (16)
consists of the multiplication of conditional probabil-
ities of measurements given that each set of measure-
ments is independent of the others. We assume that
each conditional probability is described as a Gaus-
sian probability distribution with zero mean and a
variance σ. Obtaining the maximum likelihood is
equivalent to estimating the minimum of the log func-
tion which is expressed as the following cost function:
F =
1
N
N
∑
i=1
∆
iu
+
1
M
M
∑
i=1
∆
jimu
+
1
M
M
∑
i=1
∆
jba
+
1
M
M
∑
i=1
∆
jbw
(17)
Where N is the number of events providing optical
flow during optimization span and M is the number
of IMU measurements used. ∆
iu
, ∆
jimu
are the error
terms corresponding to optical flow estimation, IMU
measurements, respectively. ∆
jba
and ∆
jbw
are the er-
ror terms corresponding to the accelerometer and gy-
roscope bias. In order to enhance the optimization
process we added a twist error term ∆
jζ
responsible
for refining the twist used for optical flow estimation
(see Figure 2). The new enhanced robust objective
function is defined as:
F =
1
N
N
∑
i=1
∆
ρ
iu
+
1
M
M
∑
i=1
∆
ρ
jimu
+
1
M
M
∑
i=1
∆
ρ
jba
+
+
1
M
M
∑
i=1
∆
ρ
jbw
+
1
M
M
∑
i=1
∆
ρ
jζ
,
(18)
Where ρ denotes the Huber norm (Huber, 1992).
The optical flow error ∆
iu
is defined as:
∆
u
= (u
e
(t) − u
m
(d(t)))
T
Σ
u
(u
e
(t)−u
m
(d(t))) (19)
where Σ
u
is the covariance matrix associated with
the optical flow. u
e
(t) is the estimated optical flow,
u
m
(d(t)) is the measured optical flow using the IMU
measurements (see Equation (5)) where the depth Z
c
initial estimate is shown in the initialization step (see
Section 4.3.1). To alleviate the problem of estimating
the depth of each event independently – which would
require heavier computations – and since the provided
events are created due to the motion of contours of
objects, we assumed that the environment contains a
sufficient amount of contour lines that can be used to
estimate the depth.
The IMU measurements error term ∆
imu
is defined
as:
∆
imu
= [∆
T
Ri j
,∆
T
vi j
,∆
T
pi j
]
T
Σ
imu
[∆
T
Ri j
,∆
T
vi j
,∆
T
pi j
] (20)
Flow-Based Visual-Inertial Odometry for Neuromorphic Vision Sensors Using non-Linear Optimization with Online Calibration
967
where Σ
imu
is the IMU covariance matrix. The prein-
tegration error terms are:
∆
Ri j
= Log
∆
˜
R
wb
i j
Exp
∂
˜
R
wb
∂b
g
∂b
g
T
R
wb
i
(t
i
)
T
R
wb
j
!
∆
vi j
= R
wb
i
V
b
j
−V
b
i
− g∆t
i j
−
−
∆
˜
V
b
i j
∂
˜
V
b
∂b
a
∂b
a
+
∂
˜
V
b
∂b
g
∂b
g
∆
pi j
= R
wb
i
P
b
j
− P
b
i
−V
i
∆t
i j
−
1
2
g∆t
2
i j
−
−
∆
˜
P
b
i j
+
∂
˜
P
b
∂b
a
∂b
a
+
∂
˜
P
b
∂b
g
∂b
g
(21)
where the partial derivatives [
∂
˜
R
wb
∂b
g
,
∂
˜
V
b
∂b
a
,
∂
˜
V
b
∂b
g
,
∂
˜
P
b
∂b
a
,
∂
˜
P
b
∂b
a
]
are calculated as explained in the supplementary ma-
terials of (Forster et al., 2016).
The error terms for the biases ∆
ba
and ∆
bw
are defined
as:
∆
ba
= (b
a j
− b
ai
)
T
Σ
ba
(b
a j
− b
ai
), (22)
∆
bw
= (b
w j
− b
wi
)
T
Σ
bw
(b
w j
− b
wi
). (23)
The twist error term as:
∆
ζi j
=
1
∆t
ˆ
T
−1
i
ˆ
T
j
⊖ ζ
i j
T
Σ
ζ
1
∆t
ˆ
T
−1
i
ˆ
T
j
⊖ ζ
i j
(24)
Frame-based optimization schemes using features
choose certain key-frames to achieve triangulation
with low uncertainty. Conversely, using optical flow
allows to ignore key-frames and freely choose the
time steps for optimization depending on either the
number of events N or the number of IMU read-
ings M. Moreover, having rich events optical flow
and lines ensure we can drop events whenever events
frequency exceeds a threshold in order to main-
tain real-time processing. The state vector we op-
timize contains position, rotation quaternion, veloc-
ity, IMU biases and the camera intrinsic parameters
{P,Q,V , d, b
a
,b
g
,K
c
}, where Q is the rotation quater-
nions, d is the depth and K
c
is the camera matrix
to calibrate the camera parameters online. Our cost
function is solved as a non-linear unconstrained least
squares problem using Levenberg-Marquardt method.
of walls (illustrative examples in Figure 4).
4.3 Optimization Conditioning
The conditioning process of our nonlinear uncon-
strained optimization scheme requires a reliable ini-
tialization for all the parameters undergoing optimiza-
tion, i.e. the camera trajectory and the scene con-
stituents (see Figure 1).
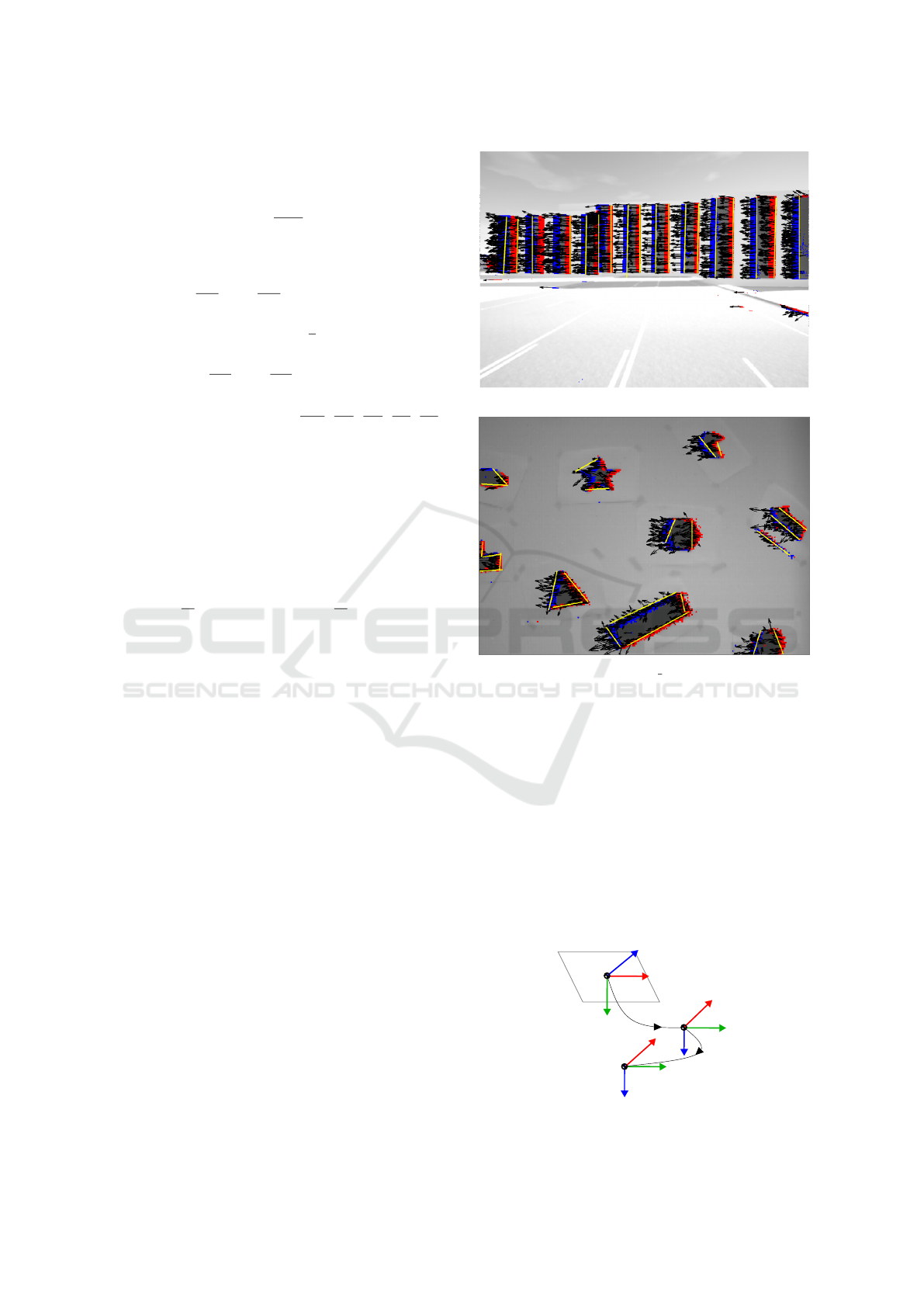
(a) IBISCape sequance.
(b) shapes 6dof.
Figure 4: Grayscale images of the sequences used to test our
algorithm with the triggered events (red for positive polarity
and blue for negative polarity). The estimated optical flow
arrows in black and the detected lines in yellows.
Event-based cameras provide information about
contours and that the lines are one of the repetitive
geometric patterns in the environment. We exploit
the detected lines (Khairallah et al., 2022a) to aug-
ment the prior information we know about the envi-
ronment. We assume that the IMU and the camera are
calibrated with initial camera intrinsic parameters val-
ues and the extrinsic transformation T
ic
between DVS
sensor and IMU (illustrated in Figure 5) is known.
To ensure a reliable online calibration of the camera-
World (W)
IMU (I)
DVS (C)
x
x
x
y
y
y
z
z
z
T
ic
T
wi
Figure 5: Event camera reference coordinate frames.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
968

IMU setup, all the intrinsic and extrinsic parameters
of both the DVS and IMU sensors are considered as
optimization states. To find 6-DoF initial pose using
optical flow, we need to know the depth of events and
to estimate depth we need the 6-DoF pose. We iter-
atively estimate an initial depth then use it to correct
for accurate pose and twist estimation.
4.3.1 Initial Depth Estimation
The line detection algorithm provides the line param-
eters (center point, line vector and principal optical
flow) and the assigned events to each line. A 2D pro-
jected line on the image plane may have varying depth
in 3D. However, the depth of events around the line’s
center point presents small depth variations (see Fig-
ure 3). We use the estimated optical flow and the IMU
measurements to estimate the depth according to (5).
Since linear velocity is obtained from single integra-
tion of IMU measurements and the angular velocity is
directly provided, we use a sliding average window to
alleviate the effect of accelerometer white noise with-
out removing the gravity vector offset. Gyroscope an-
gular velocities bias offset and white noise are filtered
out using a band pass filter. For each set of events
around a line, we use Equation (5) where the only un-
known is the inverse depth so each optical flow gives
two depth values and equation becomes:
"
1
Z
cx
1
Z
cy
#
1
Z
cx
= ( ˙x − B(x
c
,y
c
)Ω)/(A(x
c
,y
c
)V
c
) (25)
where the division here is element-wise division. The
depth ratio
1
Z
cx
/
1
Z
cy
should be identity because they
belong to the same event. If the depth ratio is not in
a bounded interval [th
1
,th
2
], this implies that the es-
timated optical flow is highly corrupt and will be re-
jected. The initial depth assigned to all events of the
line is the mean of the estimated depth around the cen-
ter after rejecting outliers. This initialization method
is only effective if the depth does not vary much along
each line, i.e. downward facing cameras of drones or
cameras moving indoor in front of walls.
4.3.2 Initial Pose and Twist Estimation
Using estimated depth of all events around center
point of detected lines and after rejecting outlier op-
tical flow, we re-inject the depth values into Equation
(5) after modifying it so that it becomes (for a single
event):
u
v
=
− f
Z
c
0
(x
c
−c
u
)
Z
c
.. .
.. .
(x
c
−c
u
)(y
c
−c
v
)
f
−
f +
(x
c
−c
u
)
2
f
(y
c
− c
v
)
0
− f
Z
c
(y
c
−c
v
)
Z
c
.. .
.. .
f +
(y
c
−c
v
)
2
f
−
(x
c
−c
u
)(y
c
−c
v
)
f
−(x
c
− c
y
)
ζ
∨
˙x
c
= C(x
c
,y
c
,Z
c
)ζ
∨
(26)
In Equation (26), the twist vector ζ
∨
is the only un-
known. We can stack the optical flow information for
all events as:
C
1
(x
c
,y
c
,Z
c
)
.
.
.
C
n
(x
c
,y
c
,Z
c
)
ζ
∨
=
˙x
c1
.
.
.
˙x
cn
. (27)
Equation (27) can be solved for ζ
∨
using least square
method for Ax = b where the solution would be
(A
T
A)
−1
A
T
b. Estimating the depth and twist is re-
peated iteratively until convergence to make sure ini-
tialized depth and twist are correctly estimated. The
initial pose is estimated by integrating the twist vec-
tor.
5 EXPERIMENTAL SETUP
Our proposed visual-inertial odometry scheme per-
forms in structured environments containing lines
with low depth variations. For this purpose, we
choose sequences fulfilling these criteria in order to
provide a fair assessment. We used one of IBISCape
sequences provided in (Soliman et al., 2022) of a
car moving in an environment augmented with white
walls and black rectangles at different depths. Addi-
tionally, we used the sequence of shapes 6dof pro-
vided in (Mueggler et al., 2017) of a handheld cam-
era moving randomly in front of different geomet-
ric shapes depicted on a wall. These sequence were,
first, passed through the optical flow estimator then
the lines detector to have all the required information
for optimization (see Figure 4).
We use Ceres solver (Agarwal et al., 2022) as an
optimizer for its automatic differentiation capability.
Our algorithm run on a 3GHz Core i7 16 core Linux
machine. We have set our time step to 0.025 s where 5
IMU measurements are preintegrated for IBISCape’s
sequence and 25 measurements are preintegrated for
Table 1: Specifications of the used sequences.
Sequence events Total IMU V
max
Ω
max
[Mevent] Time [s] [Hz] [m/s] [
◦
/s]
IBISCape 21.65 17.6 200 Hz 7.7 76
shape 6dof 17.96 59.7 1000 Hz 2.3 715
Flow-Based Visual-Inertial Odometry for Neuromorphic Vision Sensors Using non-Linear Optimization with Online Calibration
969
Table 2: Detailed quantitative analysis based-on the Average Root Mean Square Error metric of IBISCape and shapes 6dof
sequence. We report results for 25, 50, and 75 percent of dropped events as milestones for brevity.
Method
IBISCape sequence shapes 6dof sequence
µ [m] σ [m] µ [
◦
] σ [
◦
] µ [m] σ [m] µ [
◦
] σ [
◦
]
EVO (Rebecq et al., 2017a) 0.1369 0.0082 1.7840 0.6214 0.09103 0.0051 5.0217 0.9851
Proposed (All events) 0.1204 0.0079 1.5602 0.7683 0.0802 0.0043 2.5791 1.9732
Proposed (25% dropped) 0.1231 0.0117 1.5874 0.8024 0.0841 0.0094 2.8041 1.8541
Proposed (50% dropped) 0.1217 0.0172 1.4272 0.8401 0.0971 0.0158 2.8460 1.9471
Proposed (75% dropped) – – – – – – – –
Table 3: Ablation study on the event-based VI system architecture. We report the mean position errors as a percentage of the
sequence total distance [%].
Method
shapes poster dynamic
6dof translation 6dof translation 6dof translation
IDOL (Le Gentil et al., 2020) 10.4 10.2 12.4 14.0 10.8 5.0
EVIO (Zihao Zhu et al., 2017) 2.69 2.42 3.56 0.94 4.07 1.90
Rebecq et al. (Rebecq et al., 2017b) 0.42 0.50 0.40 0.46 0.56 0.39
(E + I) (Vidal et al., 2018) 0.48 0.41 0.30 0.15 0.38 0.59
Proposed (All events) 0.41 0.45 0.33 0.11 0.17 0.81
Table 4: Study on the effect of events dropping percentage
on the total optimization time reported for the shapes 6dof
sequence.
drop packet packet residual and linear Total
[%] size [−] time [s] jacobian solver [s] time [s]
time [s]
– 50 0.25 0.420759 0.304085 0.724844
– 100 0.5 0.624733 0.496576 1.121309
– 150 0.75 0.956266 0.912470 1.868736
– 200 1 1.059416 0.998935 2.058351
25 50 0.25 0.262560 0.091245 0.353805
25 100 0.5 0.545977 0.215199 0.761176
25 150 0.75 0.729159 0.275548 1.004707
25 200 1 0.845035 0.317980 1.163015
50 50 0.25 0.235112 0.082975 0.318087
50 100 0.5 0.345446 0.104557 0.450003
50 150 0.75 0.465738 0.133461 0.599199
50 200 1 0.627081 0.188407 0.815488
75 50 0.25 0.691566 0.113761 0.805327
75 100 0.5 0.997071 0.208451 1.205522
75 150 0.75 1.285245 0.418131 1.703376
75 200 1 1.375911 0.537240 1.913151
the shapes 6dof sequence. Being recorded with a
handheld camera, shapes 6dof sequence undergoes
high rotational speed and relatively low translational
speed while IBISCape’s sequence have the opposite
characteristics since it’s recorded as a car’s onboard
camera.
6 RESULTS
IBISCape’s sequence had a higher RMSE for trans-
lation because of its high translational speed. In con-
trast, shapes 6dof sequence attained a lower RMSE
for translation for the same reason. The rotational
RMSE error is maintained relatively small because
of the accuracy of the IMU measurements. Figure 7
shows the translational and rotational errors over time
for the two line-based feasible applications. The first
is the vehicle moving in a line staged textured road
(IBISCape sequence), where the errors are reported
in terms of 10’s of [cm]. Whereas, the second ap-
plication of a handheld DAVIS sensor facing shapes
with clear lines, where the errors are reported in terms
of 10’s of [mm]. However, both sequences show a
high standard deviation for the rotational errors re-
sults from the low accuracy in the gyroscope noise
covariance estimation during IMU still calibration.
We ran many experiments to check for the ac-
curacy of our system with and without dropping
events to alleviate for real-time computation. The
assumption that our scheme will still work in case
of events being dropped is made since it only de-
pends on optical flow (and not tracked features) and
that the number of optimization residuals is always
much lower than the amount of events at each time
step. We found that our system can hold accurate re-
sults until we reach around 50% of dropped events
for shapes 6dof sequence and about 60% of dropped
events for IBISCape’s sequence (see Table 2). The
amount of events that can be dropped depends on
events frequency. IBISCape’s sequence maintained
good results while more events were dropped because
of its higher resolution and events’ frequency.
The accuracy did not vary much before failure oc-
curred with 75% events dropping, which validates the
assumption that events can be dropped with a thresh-
old depending on events frequency and camera res-
olution. Dropping the events can also be improved
to maintain accuracy by choosing the dropped events
being assigned to lines where each line should have a
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
970
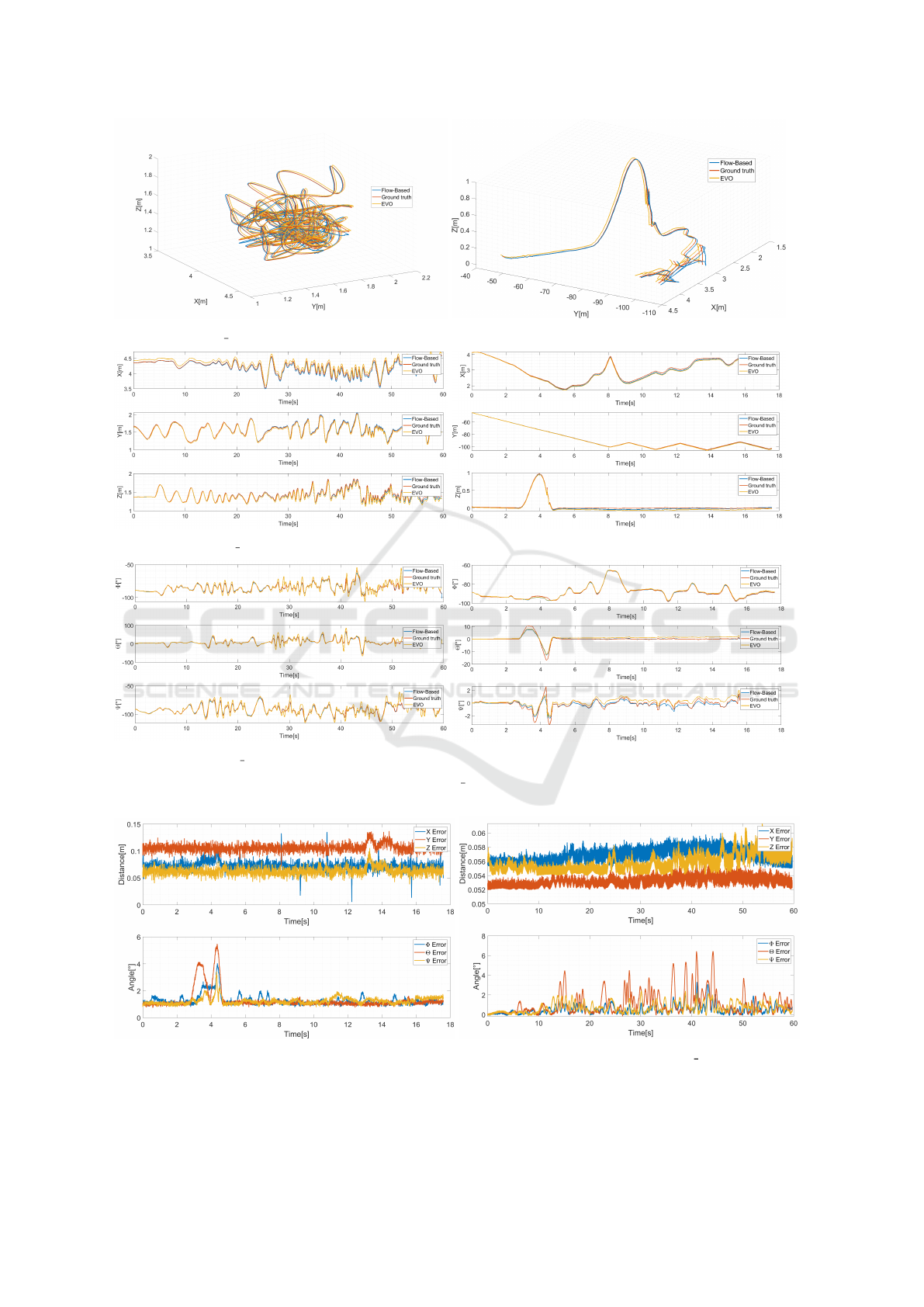
(a) shapes 6dof sequence estimated pose.
(b) IBISCape’s sequence estimated pose.
(c) shapes 6dof position in each axis.
(d) IBISCape’s position in each axis.
(e) shapes 6dof angles in each axis.
(f) IBISCape’s angles in each axis.
Figure 6: The estimated pose, position and angles of shapes 6dof and IBISCape sequences. Flow-Based method in blue,
the ground truth in red and EVO in yellow.
(a) Position and angle errors of IBISCape sequence. (b) Position and angle errors of shapes 6dof sequence.
Figure 7: Errors of our flow-based visual-inertial odometry method.
Flow-Based Visual-Inertial Odometry for Neuromorphic Vision Sensors Using non-Linear Optimization with Online Calibration
971
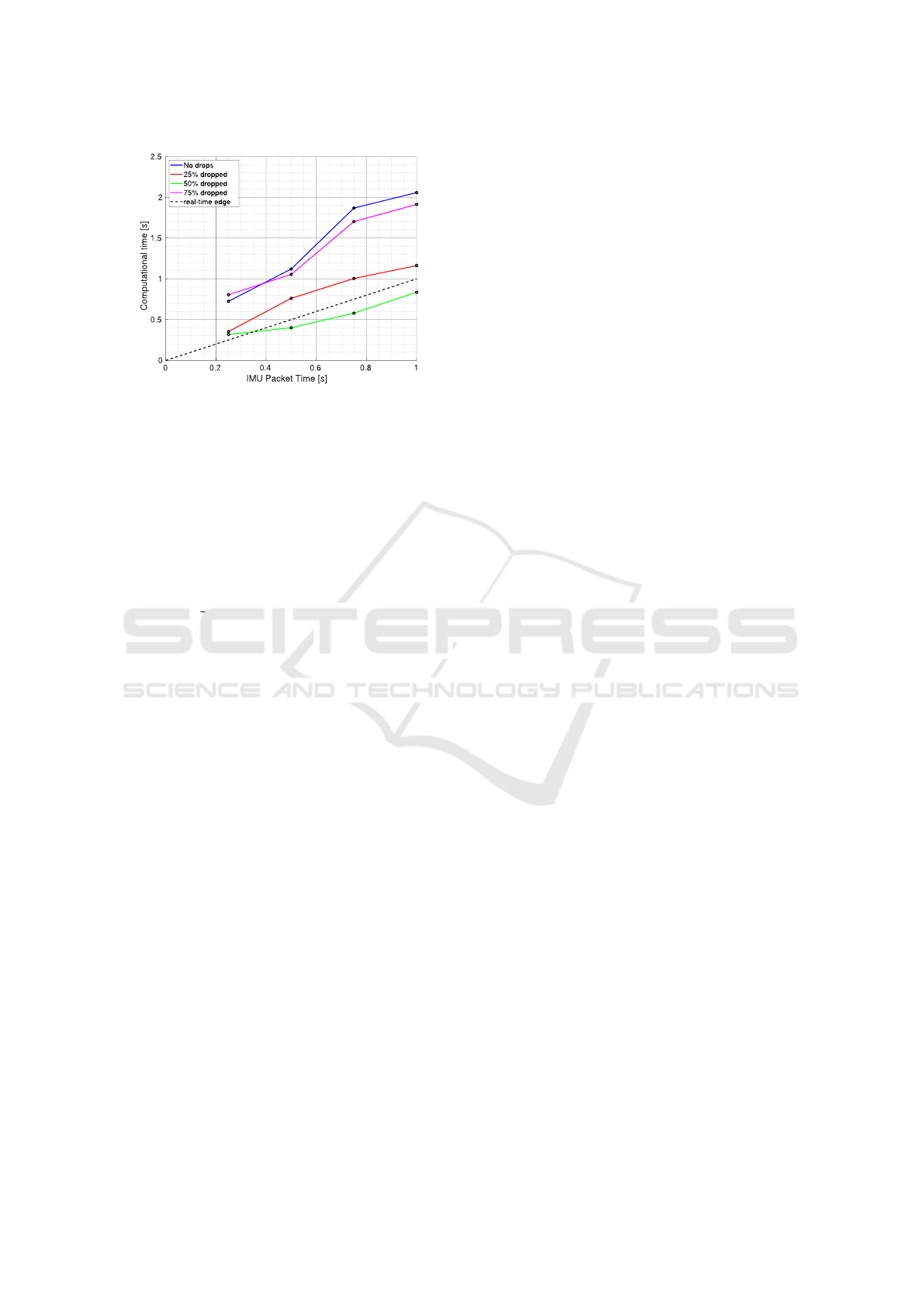
Figure 8: On-hardware real-time performance analysis.
minimum amount of events to avoid failure.
To measure the computational time of our scheme,
measurements to be optimized are placed in a sliding
window where previously optimized poses are con-
sidered constant and only the sliding window is opti-
mized. Table 4 shows the computational time of dif-
ferent windows with different percentages of dropped
events. The high computational time for IBISCape’s
sequence is due to the high number of events gener-
ated by a 1024× 1024 camera resolution. On the con-
trary, shapes 6dof sequence attained real-time per-
formance for all the sliding windows with no dropped
events.
The number of IMU measurements and the
amount of events to be dropped defines the com-
promise to achieve real-time applicability (see Fig-
ure 8). We should keep the smallest possible sliding
window with the maximum amount of events to be
dropped which leads to a trade-off between compu-
tational time and accuracy (sliding windows allowing
real-time performance are shown in bold within Ta-
ble 4). We notice an increase in the computation time
when 75% of the events are dropped as a result of an
abrupt increase in the problem uncertainty due to the
low number of optical flow edges as illustrated in Fig-
ure 2 (b), and hence, low information about the scene.
In Table 3, we represent an ablation study to in-
tellect the contribution of the event-based VI system
configuration on the pose estimation accuracy. The
main conclusion from this quantitative analysis is that
our method outperforms IDOL, an alternative state-
of-the-art line-based method that does not incorporate
optical flow, and can perform well in a line textured
environments.
7 CONCLUSION
We introduce a flow-based visual-inertial odometry
algorithm for neuromorphic vision sensors. The al-
gorithm corrects optical flow information using IMU
measurements in environments where lines can be de-
tected. We run our algorithm without the need for
triangulation or keyframe estimation, which provides
the liberty to choose the size of our sliding window
during optimization.
Instead of running for only scenarios where the
depth of lines does not vary much, the optimal perfor-
mance of our method can be witnessed when backed
with a depth sensor. Integrating a depth sensor can
also be used to estimate more accurate optical flow.
Another improvement to our system would be adding
a place recognition in order to have the ability to close
the loop in a complete SLAM system.
REFERENCES
Agarwal, S., Mierle, K., and Team, T. C. S. (2022). Ceres
Solver.
Baker, S. and Matthews, I. (2004). Lucas-kanade 20 years
on: A unifying framework. International journal of
computer vision, 56(3):221–255.
Censi, A. and Scaramuzza, D. (2014). Low-latency event-
based visual odometry. In 2014 IEEE International
Conference on Robotics and Automation (ICRA),
pages 703–710. IEEE.
Chirikjian, G. S. (2011). Stochastic models, information
theory, and Lie groups, volume 2: Analytic methods
and modern applications, volume 2. Springer Science
& Business Media.
Cyganek, B. and Siebert, J. P. (2011). An introduction to
3D computer vision techniques and algorithms. John
Wiley & Sons.
Forster, C., Carlone, L., Dellaert, F., and Scaramuzza,
D. (2016). On-manifold preintegration for real-
time visual–inertial odometry. IEEE Transactions on
Robotics, 33(1):1–21.
Furgale, P., Barfoot, T. D., and Sibley, G. (2012).
Continuous-time batch estimation using temporal ba-
sis functions. In 2012 IEEE International Confer-
ence on Robotics and Automation, pages 2088–2095.
IEEE.
Gehrig, D., Gehrig, M., Hidalgo-Carrio, J., and Scara-
muzza, D. (2020). Video to events: Recycling video
datasets for event cameras. IEEE Conf. Comput. Vis.
Pattern Recog. (CVPR), pages 3583–3592.
Huber, P. J. (1992). Robust estimation of a location param-
eter. In Breakthroughs in statistics, pages 492–518.
Springer.
Khairallah, M. Z., Bonardi, F., Roussel, D., and Bouchafa,
S. (2022a). Flow-based line detection and segmenta-
tion for neuromorphic vision sensors. In 2022 The
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
972

29th IEEE International Conference on Image Pro-
cessing (IEEE ICPR). IEEE.
Khairallah, M. Z., Bonardi, F., Roussel, D., and Bouchafa,
S. (2022b). Pca event-based optical flow: A fast and
accurate 2d motion estimation. In 2022 The 29th IEEE
International Conference on Image Processing (IEEE
ICIP). IEEE.
Kim, H., Handa, A., Benosman, R., Ieng, S.-H., and Davi-
son, A. J. (2008). Simultaneous mosaicing and track-
ing with an event camera. J. Solid State Circ, 43:566–
576.
Kim, H., Leutenegger, S., and Davison, A. J. (2016). Real-
time 3d reconstruction and 6-dof tracking with an
event camera. In European Conference on Computer
Vision, pages 349–364. Springer.
Kueng, B., Mueggler, E., Gallego, G., and Scaramuzza,
D. (2016). Low-latency visual odometry using event-
based feature tracks. In 2016 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 16–23. IEEE.
Le Gentil, C., Tschopp, F., Alzugaray, I., Vidal-Calleja, T.,
Siegwart, R., and Nieto, J. (2020). Idol: A framework
for imu-dvs odometry using lines. In 2020 IEEE/RSJ
International Conference on Intelligent Robots and
Systems (IROS), pages 5863–5870. IEEE.
Liu, M.-y., Wang, Y., and Guo, L. (2017). 6-dof motion
estimation using optical flow based on dual cameras.
Journal of Central South University, 24(2):459–466.
Longuet-Higgins, H. C. and Prazdny, K. (1980). The in-
terpretation of a moving retinal image. Proceedings
of the Royal Society of London. Series B. Biological
Sciences, 208(1173):385–397.
Lupton, T. and Sukkarieh, S. (2011). Visual-inertial-aided
navigation for high-dynamic motion in built environ-
ments without initial conditions. IEEE Transactions
on Robotics, 28(1):61–76.
Mueggler, E., Gallego, G., Rebecq, H., and Scaramuzza,
D. (2018). Continuous-time visual-inertial odometry
for event cameras. IEEE Transactions on Robotics,
34(6):1425–1440.
Mueggler, E., Huber, B., and Scaramuzza, D. (2014).
Event-based, 6-dof pose tracking for high-speed ma-
neuvers. In 2014 IEEE/RSJ International Conference
on Intelligent Robots and Systems, pages 2761–2768.
IEEE.
Mueggler, E., Rebecq, H., Gallego, G., Delbruck, T., and
Scaramuzza, D. (2017). The event-camera dataset and
simulator: Event-based data for pose estimation, vi-
sual odometry, and slam. The International Journal of
Robotics Research, 36(2):142–149.
Muglikar, M., Gehrig, M., Gehrig, D., and Scaramuzza, D.
(2021). How to calibrate your event camera. 2021
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition Workshops (CVPRW), pages 1403–
1409.
Rebecq, H., Gallego, G., Mueggler, E., and Scaramuzza, D.
(2018). EMVS: Event-based multi-view stereo—3D
reconstruction with an event camera in real-time. Int.
J. Comput. Vis., 126:1394–1414.
Rebecq, H., Horstschaefer, T., Gallego, G., and Scara-
muzza, D. (2017a). EVO: A geometric approach to
event-based 6-DOF parallel tracking and mapping in
real time. IEEE Robotics and Automation Letters,
2(2):593–600.
Rebecq, H., Horstschaefer, T., and Scaramuzza, D. (2017b).
Real-time visual-inertial odometry for event cameras
using keyframe-based nonlinear optimization. In
BMVC.
Soliman, A., Bonardi, F., Sidib
´
e, D., and Bouchafa, S.
(2022). IBISCape: A simulated benchmark for multi-
modal SLAM systems evaluation in large-scale dy-
namic environments. Journal of Intelligent & Robotic
Systems, 106(3):53.
Vidal, A. R., Rebecq, H., Horstschaefer, T., and Scara-
muzza, D. (2018). Ultimate slam? combining events,
images, and imu for robust visual slam in hdr and
high-speed scenarios. IEEE Robotics and Automation
Letters, 3(2):994–1001.
Weikersdorfer, D., Adrian, D. B., Cremers, D., and Con-
radt, J. (2014). Event-based 3d slam with a depth-
augmented dynamic vision sensor. In 2014 IEEE
international conference on robotics and automation
(ICRA), pages 359–364. IEEE.
Weikersdorfer, D. and Conradt, J. (2012). Event-based par-
ticle filtering for robot self-localization. In 2012 IEEE
International Conference on Robotics and Biomimet-
ics (ROBIO), pages 866–870. IEEE.
Weikersdorfer, D., Hoffmann, R., and Conradt, J. (2013).
Simultaneous localization and mapping for event-
based vision systems. In International Conference on
Computer Vision Systems, pages 133–142. Springer.
Zhou, Y., Gallego, G., and Shen, S. (2021). Event-
based stereo visual odometry. IEEE Transactions on
Robotics, 37(5):1433–1450.
Zihao Zhu, A., Atanasov, N., and Daniilidis, K. (2017).
Event-based visual inertial odometry. In Proceedings
of the IEEE Conference on Computer Vision and Pat-
tern Recognition, pages 5391–5399.
Zucchelli, M. (2002). Optical flow based structure from
motion. PhD thesis, Numerisk analys och datalogi.
Zucchelli, M., Santos-Victor, J., and Christensen, H. I.
(2002). Multiple plane segmentation using optical
flow. In BMVC, volume 2, pages 313–322.
Flow-Based Visual-Inertial Odometry for Neuromorphic Vision Sensors Using non-Linear Optimization with Online Calibration
973
