
Trade-off Clustering Approach for Multivariate Multi-Step Ahead
Time-Series Forecasting
Konstandinos Aiwansedo, Wafa Badreddine and J
´
er
ˆ
ome Bosche
Department of Science, University of Picardy Jules Verne, 33 rue Saint-Leu, Amiens, France
Keywords:
Artificial Intelligence, Time-Series Forecasting, Neural Networks, Clustering Algorithms, Machine Learning,
Univariate and Multivariate Time Series.
Abstract:
Time-Series forecasting has gained a lot of steam in recent years. With the advent of Big Data, a consid-
erable amount of data is more available across multiple fields, thus providing an opportunity for processing
historical business-oriented data in an attempt to predict trends, identify changes and inform strategic decision-
making. The abundance of time-series data has prompted the development of state-of-the-art machine learning
algorithms, such as neural networks, capable of forecasting both univariate and multivariate time-series data.
Various time-series forecasting approaches can be implemented when leveraging the potential of deep neu-
ral networks. Determining the upsides and downsides of each approach when presented with univariate or
multivariate time-series data, thus becomes a crucial matter. This evaluation focuses on three forecasting ap-
proaches: a single model forecasting approach (SMFA), a global model forecasting model (GMFA) and a
cluster-based forecasting approach (CBFA). The study highlights the fact that the decision pertaining to the
finest forecasting approach often is a question of trade-off between accuracy, execution time and dataset size.
In this study, we also compare the performance of 6 deep learning architectures when dealing with both uni-
variate and multivariate time-series datasets for multi-step ahead time-series forecasting, across 6 benchmark
datasets.
1 INTRODUCTION
Large volume of data are daily generated and stored in
capacious databases, in hopes of being exploited later
on (Oussous et al., 2018). These data can be stored
in different formats and structures. A particular type
of data are time-series data. Time-series is a set of
sequential data collected through repeated measure-
ments over time. When a time-series describes a sin-
gle variable, it is referred to as univariate time-series.
For example, in weather forecasting, past recorded
temperature values are used to predict future temper-
atures. On the other hand, when it involves multiple
variables, it is referred to as multivariate time-series.
An example of a multivariate time-series forecasting
is the forecasting of the future price of Bitcoin based
on historical times series of the price itself, as well
as other variables such as volume and date-derived
features. The plethora of time-series data in recent
years has enriched the field of Big Data and prompted
the development of machine learning techniques ca-
pable of dealing with the complexity associated with
such data, whether it be for forecasting, classifica-
tion or clustering purposes. Various statistical mod-
els have been proposed over the years, exclusively
designed for univariate time-series forecasting (Box,
1970). The main downside with most classical time-
series models is that they tend to perform poorly on
nonlinear data and are generally more suited for uni-
variate time-series forecasting.
The limitations associated with statistical tech-
niques have motivated the development of machine
learning algorithms, such as, support vector regres-
sion (SVR), decesion trees, XGBoost, AdaBoost and
deep neural network models, among others. Among
all cited algorithms, deep neural networks have man-
aged to draw significant attention.
These models are able to find temporal structures,
model seasonality and temporal dependencies in se-
quential data. They have gained quite a reputation
these last years and have been implemented across
multiple fields for resolving numerous problems such
as natural language processing ,image detection and
recognition, stock exchange forecasting, electricity
load forecasting etc.
When dealing with neural networks for time-
Aiwansedo, K., Badreddine, W. and Bosche, J.
Trade-off Clustering Approach for Multivariate Multi-Step Ahead Time-Series Forecasting.
DOI: 10.5220/0011660100003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 2, pages 137-148
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
137

series forecasting, multiple forecasting approaches
present themselves. Instead of using a separate neu-
ral network model to individually forecast each time-
series of a particular dataset or even implementing
a global model for parallel forecasting, a clustering
approach could also be envisaged for this purpose
(Bandara et al., 2020)-(Tadayon and Iwashita, 2020).
This approach consists of implementing time-series
clustering techniques in order to group homogeneous
time-series into subgroups, with the intention of us-
ing as many neural network models for forecasting
as there are subgroups. The clustering approach was
proposed as a means to overcome global models’ ac-
curacy decrease when presented with multiple hetero-
geneous time-series as input.
In this paper, we propose a comparative study
of the three multivariate time-series forecasting ap-
proaches on 6 benchmark time-series datasets. The
first approach, denoted as Separate Model Forecasting
Approach (SMFA), involves individually forecasting
each time-series of a dataset with a separate deep
learning model. The second strategy referred to as a
Global Model Forecasting Approach (GMFA), where
cross-series information sharing is exploited by using
a unique and global model to process in parallel, all
time series at once. The third strategy is dubbed as
Cluster-Based Forecasting Approach (CBFA), which
consists of grouping together similar time-series by
implementing clustering algorithms, prior to the fore-
casting phase. To our knowledge, there has not been
any comparative study of these three approaches in
one single study, with the implementation of multiple
state-of-art time-series deep neural networks. In ad-
dition a hybrid neural network model’s performance
(CNN-GRU) is evaluated and compared to that of in-
dividual deep learning models (MLP, RNN, LSTM,
GRU, CNN) with respect to the Weighted Average
Percentage Error Metric (WAPE) and in terms of ex-
ecution time.
This paper is organized as follows: Section 2 men-
tions the related work associated with local, global
and cluster-based forecasting approaches for univari-
ate and multivariate time-series. Section 3 specifies
the proposed forecasting approaches implemented for
this evaluation. Section 4 details the requirements
needed prior to forecasting approaches performance
evaluation and the results of the clustering algorithms’
tuning is also analyzed. Section 5 presents and dis-
cusses results of our forecasting approaches’ perfor-
mance evaluation, whereas Section 6 draws conclu-
sions on the results of our evaluation and points out
what future work should entail.
2 RELATED WORK
In this section, we present the related work pertaining
to three main approaches implemented when dealing
with time-series forecasting, as well as the research
carried out on deep learning architectures for time-
series predictions.
Local Based Technique for Time-Series Forecast-
ing. When aiming to forecast multiple time-series
in a dataset, one’s traditional approach would be to
individually model each time-series present in the
dataset. Such approach is dubbed a local approach
and exploits univariate time-series datasets. In such
regressive cases, a time-series’ future values only de-
pend on its past observations. There has been a lot
a research done on using deep learning models to re-
gressively forecasts univariate time-series. In (Chan-
dra et al., 2021), a performance evaluation of mul-
tiple deep learning models such as long short term
memory (LSTM), recurrent Neural networks (RNNs),
convolutional neural networks (CNNs) and bidirec-
tional LSTM (BiLSTM), is conducted. These mod-
els are implemented on univariate time-series and a
multi-step ahead forecasting scheme is carried out on
benchmark datasets. The study concluded that bidi-
rectional networks and encoder-decoder LSTM out-
competed their rivals in terms of accuracy for both
simulated and real-world time series problems. In
(Papacharalampous et al., 2018), a univariate time-
series forecasting study is presented. In this study,
temperature and precipitation are predicted using both
machine learning (ML) and statistical methods. Prob-
lems associated with univariate time-series forecast-
ing such as, lagged variable selection, hyperparameter
selection and performance comparison between ma-
chine learning and classical algorithms are explored
and dealt with.
Global Based Techniques for Time-Series Fore-
casting. A unique universal function approximator
can also be used for multivariate time-series forecast-
ing. In such scenarios, a unique deep learning model
takes multiple time-series as input at once, processes
them in parallel and outputs predictions for each time-
series of a dataset. In (Montero-Manso and Hynd-
man, 2021), the local and global principles are stud-
ied and both statistical and deep learning models are
implemented on benchmark datasets. According to
this study, as the length of a series increases so does
the complexity of local models, which is not the case
with global models. The authors showed that global
models with an increased complexity outperformed
local state-of-the-art models on most datasets, with
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
138

way fewer parameters. Nonetheless, they argued that
the benefits of one principle over the other depends
on the context. Their findings underline the necessity
of further research in the field of time-series forecast-
ing. In (Sen et al., 2019), a hybrid model is proposed,
capable of thinking globally but acting locally. The
model achieves such a feat by leveraging its convolu-
tion layers, which capture both local and global time-
series properties in a dataset. The proposed model
outperformed its contenders on 4 benchmark datasets.
In (Wan et al., 2019), a novel multivariate tempo-
ral convolutional network is proposed for multivari-
ate time-series forecasting and compared to existing
widely used models for such tasks, such as LSTMs,
CNNs and multivariate attention-based models.
Clustering-Based Techniques for Time-Series
Forecasting. When dealing with multiple time-
series forecasting problems, a number of approaches
have been put forward over the years in an effort to
ameliorate time-series forecasting accuracy. One of
this approach entails a clustering paradigm, whose
advantages have been detailed in (Bandara et al.,
2020), (Pavlidis et al., 2006), (Asadi and Regan,
2020) , (Cherif et al., 2011) and (Mart
´
ınez-Rego
et al., 2011). In (Bandara et al., 2020) a clustering
approach was evaluated on two different datasets:
CIF2015 and NN5. On the CIF2015 dataset, the
proposed clustering model outperformed the other
models with respect to the specific evaluation metrics
used in the competition. On the NN5 dataset, a
model based on the clustering method was the best
performing contender in terms of the average rank-
ings, over the evaluated error measures. A similar
clustering method was put forward in (Tadayon
and Iwashita, 2020), where the clustering approach
results indicated overall forecasting improvements in
terms of accuracy and execution time. In (Pavlidis
et al., 2006), the clustering approach was imple-
mented on a financial dataset so as to address noise
and non-stationarity. The experimental results were
promising for one-step-ahead forecasting, while
multi-step ahead forecasting being a more difficult
task. In (Sfetsos and Siriopoulos, 2004), a clustering
method was implemented for pattern recognition on
separate datasets.
In this study (Yatish and Swamy, 2020), clusters
were generated by a data analysis oriented cluster
methodology that formed groups with similar linear
relationships of their most common property. There-
after, a pattern recognition scheme was employed for
forecasting. The proposed scheme showed an im-
provement in terms of error over conventional fore-
casting algorithms. In (Stoean et al., 2020), a simi-
lar approach was implemented, where self-organizing
maps, a shape-similarity clustering model was used
to group similar medical data of patients and prior to
implementing a CNN-LSTM model for classification.
Deep Learning Architectures. When it comes to
time-series forecasting, one has multiple avenues for
achieving it. Traditionally, statistical methods such as
ARIMA were the default choice. But the shortcom-
ings of such statistical approaches lead to the develop-
ment of neural network architectures. Initially, Feed
Forward Neural Networks (FFNN) were proposed for
time-series forecasting. Nonetheless, these were not
tailor-made architectures for time-series processing as
they did not take into account the sequentiality as-
sociated with time-series data. Later on, sequential
processing oriented architectures were proposed for
time-series data, most notably, recurrent neural net-
works and its variants such as Elman Recurrent Net-
works (ERNNs), Long Short-Term Memory (LSTM)
and Rated Recurrent Units (GRU), tailor-made for
processing sequential data.
In recent years, convolutional neural networks
(CNNs) which were primarily earmarked for image
and audio processing have also earned quite a repu-
tation in the field of time series forecasting, as they
are quite adept at extracting spatial and temporal in-
formation in sequential data and are computationally
cheaper than recurrent neural networks.
Hybrid models based on a combination of sta-
tistical and deep learning models have also recently
emerged. In (Zhang et al., 2019) results showed that
the merging of the two models significantly resulted
in reduction in the overall forecasting error, with the
hybrid model being able to capture concurrently both
linear and nonlinear patterns in the dataset. Hy-
brid models based solely on combination of machine
learning models have also been widely studied and
democratized. In (Pan et al., 2020), (Yu et al., 2021)
and (Sajjad et al., 2020), a hybrid CNN-GRU model
is utilized for resolving various tasks such as, wa-
ter level prediction, license plate recognition, oil soil
moisture prediction and short-term residential load
forecasting respectively. Despite the success of super-
vised learning, in particular that of recurrent architec-
tures in the field of time-series forecasting, other ma-
chine learning branches have also proposed various
models for time-series forecasting, such as, state spate
models in (Franceschi et al., 2020), representation
learning based models in (Rangapuram et al., 2018)
and natural language processing attention-based mod-
els dubbed transformers in (Grigsby et al., 2021).
Trade-off Clustering Approach for Multivariate Multi-Step Ahead Time-Series Forecasting
139
3 PROPOSED FORECASTING
APPROACHES
In this section, we present in detail three forecasting
approaches:
1. Separate Model Forecasting Approach - SMFA
(section 3.1)
2. Global Model Forecasting Approach - GMFA
(section 3.2)
3. Cluster-Based Forecasting Approach - CBFA
(section 3.3)
These approaches propose a multi-step ahead
time-series prediction scheme, by implementing a
Multi Input Multi Output strategy (MIMO). The pur-
pose of this conducted study is to determine the ap-
propriate way of processing multivariate time-series
for forecasting when exploiting various deep learning
neural network architectures and identifying the most
important factors related to each approach in order to
obtain optimal results.
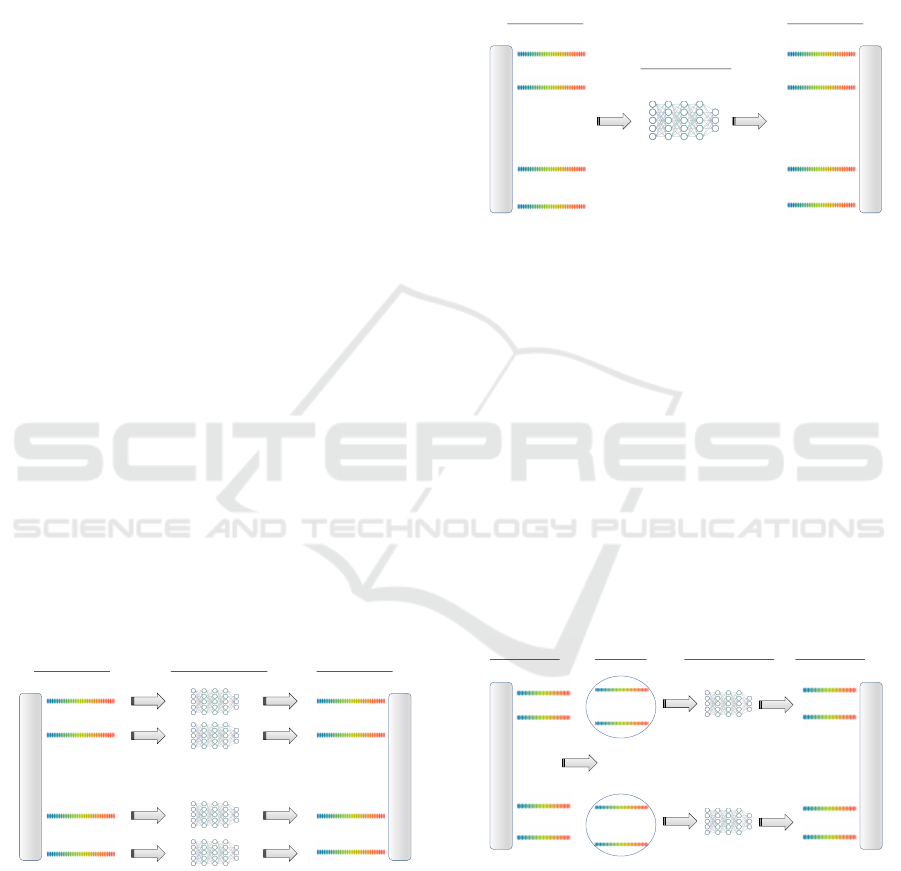
3.1 Separate Model Forecasting
Approach (SMFA)
SMFA is depicted in figure 1 and is implemented in
(Wang and Jiang, 2015). It involves individually pro-
cessing each time-series of a dataset with a separate
deep learning model. In this scenario, the forecast-
ing results of a particular time-series are solely based
on the historical data of that particular series. This
is a autoregressive process in which a time series is
explained by its past values rather than that of other
time-series variables.
1 : N Time-Series
.
.
.
1 : N Time-Series1:N Neural Networks
Input Dataset
.
.
.
Predicted Output
Figure 1: Separate Model Forecasting Approach (SMFA).
3.2 Global Model Time-Series
Forecasting Approach (GMFA)
GMFA is presented in figure 2 and is implemented
in (Karunasinghe and Liong, 2006). In this approach,
cross-series information sharing is being exploited, by
using a unique and global model to process in par-
allel, all time-series at once. In this context, cross-
series information sharing becomes an essential and
decisive factor. Indeed, the predictions of a particu-
lar time-series are influenced not only by its historical
data but also by those of other time-series contained
in the same dataset.
1 : N Time-Series
.
.
.
1 : N Time-Series
1:1 Neural Network
Input Dataset
.
.
.
Predicted Output
Figure 2: Global Model Forecasting Approach (GMFA).
3.3 Cluster-Based Time-Series
Forecasting Approach (CBFA)
CBFA approach is presented in figure 3. This ap-
proach is based on two phases:
1. Clustering phase: In this phase, time-series are
processed in order to determine similarity in such
a way as to partition the dataset into homogeneous
groups, called clusters (Aghabozorgi et al., 2015).
2. Forecasting phase: During this phase, a separate
deep neural network model is implemented for
each cluster previously identified in the clustering
phase.
1 : N Time-Series
.
.
.
1 : N Time-Series1:M Neural Networks
Input Dataset
.
.
.
Predicted Output
1:M Clusters
.
.
.
Clustering
Figure 3: Cluster-based Model Forecasting Approach
(CBFA).
Time-series clustering techniques have been ex-
tensively resorted to (Tadayon and Iwashita, 2020) as
tools for resolving plenty of challenges such as mo-
tif discovery, clustering, anomaly detection, classifi-
cation, sub-sequence matching, etc., across multiple
fields, such as, engineering, finance, health care, busi-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
140

ness (Liao, 2005).
In the following, we present three main clustering
algorithms that have been referenced in the literature
and will be exploited for the CBFA approach:
1. The Self-Organising-Map (SOM) algorithm is a
particular type of neural networks, which uses
unsupervised learning to perform dimensionality
reduction (Kohonen, 1982) (Aghabozorgi et al.,
2015). It does so by reducing a multidimensional
input space into a two-dimensional map. It can
also be used for clustering time-series features.
Instead of optimization algorithms, such as gra-
dient descent, the SOM algorithm relies on com-
petitive learning during the learning process. It is
considered as a model-based clustering approach
as it uses the trained weights to determine the ap-
propriate clusters (Aghabozorgi et al., 2015)(Rani
and Sikka, 2012). The SOM algorithm’s dimen-
sions (x and y integer values), that is, the number
of input neurons must be specified prior to imple-
mentation. We determined the x and y parameters
needed for the SOM algorithm by using a method
employed by practitioners in Equation 1. Later
on, these two parameters will be modified with the
aim of generating multiple clusters (section 4.5).
x = y = round(( Number of series in dataset )
1
4
)
(1)
2. The Ordering points to identify the clustering
structure (OPTICS) is a density-based clustering
algorithm, capable of effectively detecting clus-
ters in data of varying density (Ankerst et al.,
1999). It determines neighboring points by lin-
early arranging them in order, in a manner that
the closest points in space become neighbors. It
identifies core samples of high density, generates
clusters from them and it is well suited for large
datasets. The algorithm requires the number of
samples in a neighborhood for a point to be con-
sidered as a core point (min sample) to be spec-
ified before implementation. This parameter will
be varied at a later stage, for the purpose of pro-
ducing various clusters (section 4.5).
3. K-Means is an unsupervised learning algorithm,
intended for unlabeled data, which involves
grouping similar data points within a dataset into
k clusters. This is usually achieved by a proxim-
ity measure, such as the Euclidean distance. Each
cluster is represented by a prototype and is iter-
atively updated by calculating the mean of each
cluster after points have been assigned (Syakur
et al., 2018). Unfortunately, in order to do so
effectively, the number of clusters is required
beforehand, which is usually unknown when it
comes to untagged data. Different techniques in-
cluding the elbow method are often used to ad-
dress this conundrum.
4 FORECASTING APPROACHES
PERFORMANCE EVALUATION
REQUIREMENTS
In this study, six publicly available datasets were used
to compare the three forecasting approaches (sec-
tion 4.1). These approaches were evaluated based
on WAPE and execution time metrics (section 4.2).
To do so, the hardware requirements needed to carry
out this evaluation study are presented in section 4.3
and the neural networks models’ configuration are
presented in section 4.4. In addition, we have fore-
gone further experimentation to determine the opti-
mal clusters for each dataset (section 4.5) for each
clustering algorithms: SOM (section 1), OPTICS
(section 2) and K-Means (section 3).
4.1 Datasets
In this section, we briefly present 6 publicly avail-
able datasets
1
used for our study in table 1: Exhang-
eRate datasets, NN5, SolarEnergy, Traffic-metr-la,
WikiWebTraffic and Traffic-perms-bay datasets. These
datasets, originate from different areas, vary from
small to large datasets, with a number of time-series
ranging from 8 to 997 and with the series’ length rang-
ing from 735 to 52105 samples. These datasets have
been used in forecasting competitions and other time
series forecasting reviews such as (Lara-Ben
´
ıtez et al.,
2021) and (Hewamalage et al., 2021).
Table 1: Six different datasets used in the evaluation of fore-
casting approaches’ performance.
Datasets N of Time-Series Length Source
ExchangeRate 8 7588 Exchange rate data
NN5 111 735 Financial transaction data
SolarEnergy 137 22744 Solar production records
Traffic-metr-la 207 34260 Traffic speed data
WikiWebTraffic 997 550 Wikipedia traffic flow
Traffic-perms-bay 325 52104 Traffic network data
4.2 Evaluation Metrics
To evaluate our three forecasting approaches, we use
the WAPE metric (section 4.2.1) to assess the accu-
racy of predictions as well as completion time (section
1
Datasets are available at the reviewers’ request
Trade-off Clustering Approach for Multivariate Multi-Step Ahead Time-Series Forecasting
141

4.2.2) to evaluate execution time, which considered a
crucial factor in multiple practical applications. The
Mean Absolute Error (MAE) metric was also used to
evaluate accuracy but was excluded from the study
due to its results being similar to that of the WAPE
metric.
4.2.1 Weighted Average Percentage Error
Metric (WAPE)
The WAPE metric, Equation 2, is a well-known error-
scaling metric when dealing with time series forecast-
ing. It is suited for low volume data and allows com-
parable evaluation across time series of inconsistent
scales (Lara-Ben
´
ıtez et al., 2021).
WAPE =
∑
n
i=1
|y
i
− ˆy
i
|
∑
n
i=1
|y
i
|
(2)
where n and i represents the number of observations
and the current observation respectively, y
i
represents
the actual value of the series and ˆy
i
represents the pre-
dicted value.
4.2.2 Execution Time
The execution time is considered a crucial evalua-
tion metric. It is used for evaluating the forecasting
approaches’ completion time as well as the execu-
tion time associated with each neural network model.
It also provides variable indications for both fore-
casting approaches and neural models’ performance.
Hence, in the evaluation result section (5.2.2), we will
present:
1. Execution time per forecasting approach: It cor-
responds to the completion time across all imple-
mented neural networks models for each forecast-
ing approach and for each dataset.
2. Execution time per neural network model: It cor-
responds to the completion time of each specific
neural network model across all forecasting ap-
proaches and for each dataset.
4.3 Hardware Requirements
The evaluation of the three forecasting approaches,
across six different neural networks models and six
different datasets, required an adapted hardware for
the experimentation. Hence, for the hardware speci-
fications, we used our laboratory distributed memory
system
2
. It is made up of 2320 computing cores, 20
GPUs, corresponding to a computing power of 225
2
More details regarding our laboratory system and a
link to its website are available at the reviewers’ request.
teraFLOPS, and 19.4 TB of memory and a visualiza-
tion node (1 GPU). The platform also benefits from
3D scanners, humanoid robots and adapted software.
4.4 Deep Neural Networks’ Parameters
Deep learning models’ parameters that were shared
across 6 deep leaning models for this evaluation are
depicted in Table 2. As for the parameters associated
to each model, they are displayed in Table 3.
Table 2: Deep Learning Models’ Shared Parameters.
Parameters Values
Normalisation (ED) Minmax
Optimizer Adam
Batch size 32
N of epochs 100
Learning Rate 0.01
Past History 30 timesteps
Forecast Horizon 20
Forecasting scheme Multi-Input Multi-Output (MIMO)
Table 3: Deep Learning Models’ Hyperparameters.
Models Parameters Values
MLP Hidden Layers [8, 16, 32, 16, 8]
RNN
Layers
Units
Return sequence
3
32,32
False, True
LSTM
Layers
Units
Return sequence
2
32,32
False, True
GRU
Layers
Units
Return sequence
2
32,32
False, True
CNN
Layers
Filters
Pool size
2
32,32
2, 2
CNN-LSTM
Layers
Filters - Units
Pool size - Return sequence
1 - 2
64 - 200,100
None - False, True
4.5 Towards Optimal Clusters
Generation
Prior to evaluating the clustering approaches’ per-
formance (CBFA), the goal is to process the time-
series in each dataset and group them into homoge-
neous clusters. To do so, three different clustering
algorithms are used: K-Means, OPTICS and SOM.
However, the clustering algorithms’ results tend to
vary when their hyperparameters are tampered with.
Hence, we proceed in two steps:
1. Clusters generation phase : During this phase, we
implement clustering algorithms on each dataset
to generate clusters. We then vary the parameters
of those clustering algorithms, which results in the
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
142

formation of various clusters for each dataset. The
results associated to each clustering algorithm are
presented in Table 4.
2. Clusters selection phase: Following the clustering
generation phase, we determine the best clusters
for each dataset. We do so, by selecting the clus-
ters with the lowest average WAPE error across 6
neural networks models mentioned in 3 for each
dataset. As a result, we determine the appropri-
ate clusters formations (or in another word, the
appropriate parameters for each clustering algo-
rithm) for each dataset. The results are exhibited
in Figure 4.
The procedure and details associated with the
clusters generation phase for the SOM and OPTICS
algorithms are presented in figure below. As for the
K-Means algorithm a different technique is imple-
mented for identifying the appropriate clusters :
• With the goal of determining the optimal clusters
for the SOM algorithm, we tamper with the di-
mension parameters (x and y) mentioned in equa-
tion 1. We present five variations of these param-
eters. Each variation results in a different clusters
formation. For example, SOM
4
is the result of
determining x and y parameters with equation 1,
and then increasing by 2. The lowest number of
clusters proposed varying the SOM algorithm is
equal to 1 and the highest number of clusters is 49
clusters.
• As for the OPTICS algorithm, we vary the mini-
mum sample (min sample) parameter in section 2.
We vary this parameter 4 times, with each modi-
fication resulting in a new cluster formation. For
example, OPTICS
4
is the result of changing the
minimum sample parameter to equal 5. The low-
est number of clusters proposed varying the OP-
TICS algorithm is equal to 1 and the highest num-
ber of clusters is 600 clusters.
• As for the K-Means algorithm, we opt for a differ-
ent technique in determining optimal clusters for
each dataset. Indeed, we instead implement the el-
bow method for determining the optimal number
of clusters needed as input to the algorithm. The
elbow technique is a way of heuristically approxi-
mating the optimal number of clusters in a dataset,
for the K-Means algorithm (Marutho et al., 2018).
It consists of generating clusters for a range of val-
ues of K while using a cost function to estimate
each cluster’s error. When plotted on a graph, it
takes the shape of a curved arm. The resulting
curve, resembling an elbow, dictates the idyllic
number of clusters. The number of cluster cor-
responding to the point of inflection on the curve
is then considered the optimal number of clus-
ters needed.(Liu and Deng, 2020). Its selection is
more often than not a trade-off between the pos-
sible number of clusters and the cost function’s
estimated error for each cluster.
Datasets
Average WAPE for clusters-only approaches
ExchageRate NN5 SolarEnergy Traffic-metr-la WikiWebTrafficTraffic-perms-bay
0
0.5
1
1.5
2
CBFA.K-Means
CBFA.SOM1
CBFA.SOM2
CBFA.SOM3
CBFA.SOM4
CBFA.SOM5
CBFA.OPTICS1
CBFA.OPTICS2
CBFA.OPTICS3
CBFA.OPTICS4
Figure 4: CBFA Clusters’ Average WAPE Error.
5 FORECASTING APPROACHES
PERFORMANCE EVALUATION
RESULTS
In this section, the experimental results of our eval-
uation study are displayed. We proceed to evalu-
ate our 3 forecasting approaches. The first approach
being the individual model approach (SMFA) sec-
tion3.1, the second being the global model approach
(GMFA) detailed in section 3.2 and the third one
being the clustering approach section 3.3, proposed
by CBFA.SOM, CBFA.OPTICS and CBFA.K-Means
algorithms, whose most suitable clusters for each
dataset was determined in section 4.5. The accuracy
of both forecasting approaches and neural networks
models are displayed in section 5.1. In addition, the
completion time for both forecasting approaches and
neural networks models are showed in 5.2. The 200
last points of each dataset were used as the training
set.
The radar plots in 5, display the normalized results
described in 5.1, allowing for the comparison of both
forecasting approaches and models’ performance. For
each plot, the smallest value for the WAPE metric,
corresponding to the best approach, is positioned at
the center of the radar plot. They present the aver-
age results obtained over the 10 predictions that were
carried out by each model for each approach.
The distribution of the results over the 10 predic-
tions is displayed in figure 6. This representation al-
lows for a visualization of the average results obtained
per approach and per dataset. The mean value of the
Trade-off Clustering Approach for Multivariate Multi-Step Ahead Time-Series Forecasting
143
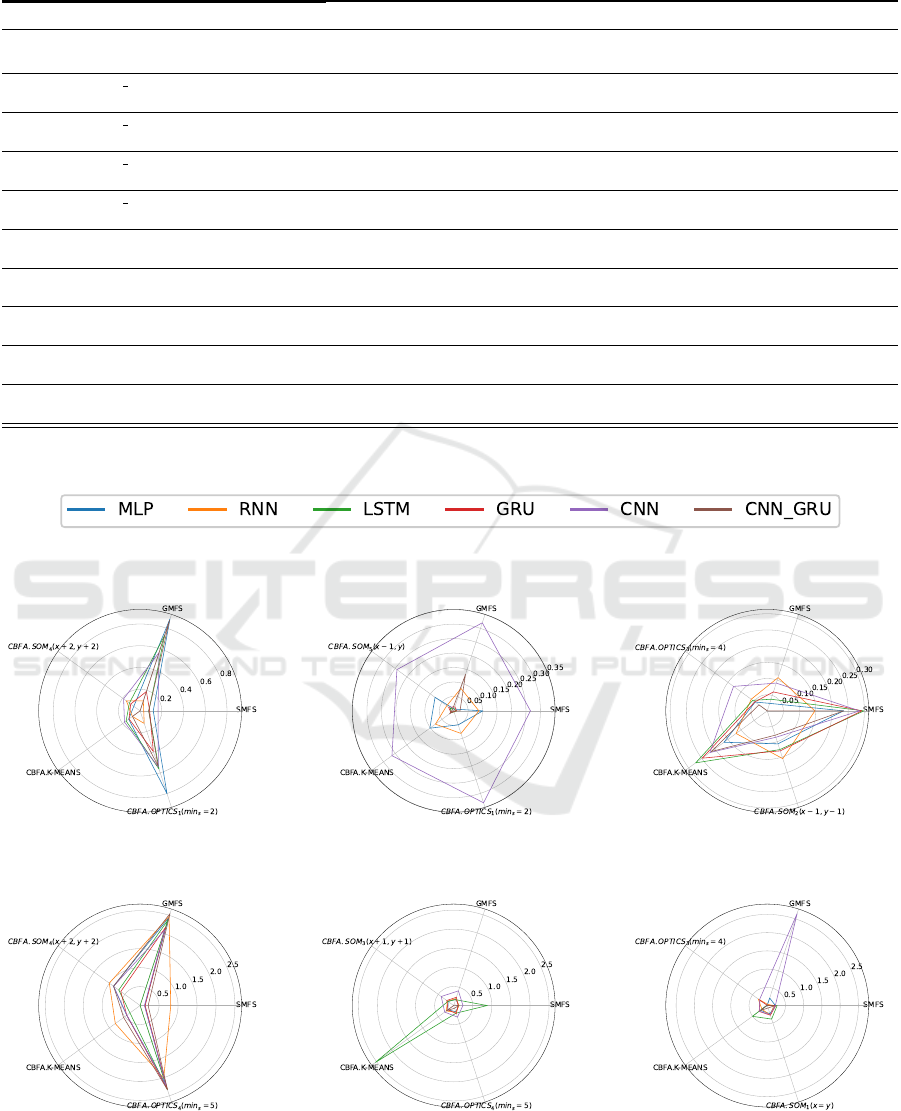
Table 4: Cluster Generation Results.
Clustering Algorithms ExchangeRate NN5 SolarEnergy Traffic-metr-la WikiWebTraffic Traffic-perms-bay
K-means
Execution Time (seconds)
4
0.11
80
0.66
80
3.43
80
7.06
600
6.04
150
8.57
OPTICS
1
(min sample=2)
Execution Time (seconds)
1
0.22
10
0.09
21
6.82
21
24.29
59
9.05
72
8.14
OPTICS
2
(min sample=3)
Execution Time (seconds)
1
0.01
5
0.07
5
0.69
18
2.23
16
1.08
20
7.52
OPTICS
3
(min sample=4)
Execution Time (seconds)
1
0.01
3
0.07
3
0.68
14
2.37
3
1.01
4
7.58
OPTICS
4
(min sample=5)
Execution Time (seconds)
1
0.02
2
0.06
1
0.68
7
2.51
1
1.15
3
7.51
SOM
1
(x = y)
Execution Time (seconds)
4
93.87
16
57.44
16
645.66
16
1060.82
35
74.91
25
6097.14
SOM
2
(x-1,y-1)
Execution Time (seconds)
1
33.74
9
35.87
9
439.81
9
57.99
25
859.35
16
2866.27
SOM
3
(x+1,y+1)
Execution Time (seconds)
7
180.71
25
67.05
25
1675.99
25
87.82
49
2945.29
36
8478.53
SOM
4
(x+2,y+2)
Execution Time (seconds)
8
301.03
36
85.86
36
2719.38
36
115.82
64
5529.85
49
11625.32
SOM
5
(x-1,y)
Execution Time (seconds)
2
40.87
12
40.24
12
740.79
12
124.74
30
1184.59
20
3820.11
(a) ExchangeRate. (b) NN5. (c) SolarEnergy.
(d) Traffic-metr-la. (e) WikiWebTraffic. (f) Traffic-perms-bay.
Figure 5: Forecasting Approaches’ Evaluation Results.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
144
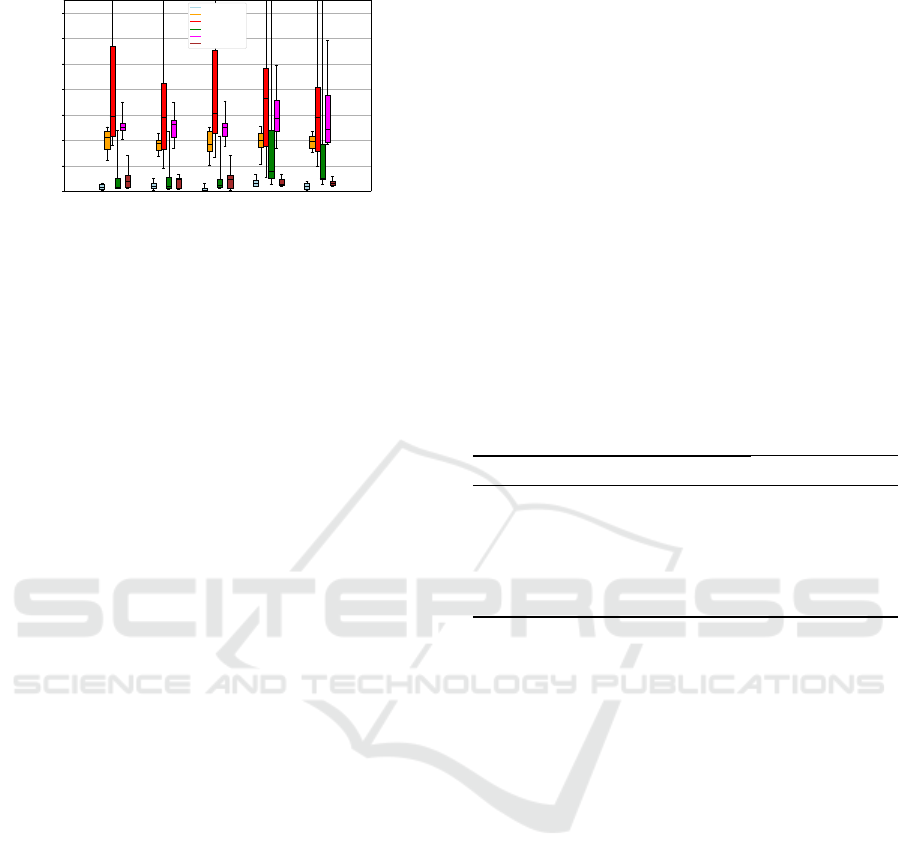
SMFA GMFA CBFA.KMEANS CBFA.OPTICS CBFA.SOM
Box Plots For 3 Approaches (6 model s)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
Average WAPE Error
Box Plots For 3 Approaches (6 models)
ExchangeRate
NN5
SolarEnergy
Traffic-metr-la
WikiWebTraffic
Traffic-perms-bay
Figure 6: Results’ Distribution For 3 Approaches.
WAPE metric is represented by the horizontal bar in
the box plots, the standard deviation by the length of
the boxes, while the minimum and maximum values
are associated with the ends of the segments. This
figure highlights the effectiveness of the different ap-
proaches, in particular those of the Exchange Rate,
Traffic-metr-la and Traffic-perms-bay datasets, while
showing the variability of the results obtained from
one prediction to another, particularly significant for
the Solar Energy dataset.
5.1 Average WAPE Results
For estimating a forecasting approach’s performance
displayed by spider plots in figure 5, a WAPE er-
ror metric is computed for 6 different neural network
models, i.e., MLP, RNN, LSTM, GRU, CNN, CNN-
GRU, for that particular approach. The overall error
for each forecasting approach is calculated by aver-
aging the the WAPE errors across all neural network
models for each time-series and each dataset.
Table 5 condenses the results of the radar plots de-
picted in figure 5, by emphasizing this time around
the 2 most advantageous approaches for every dataset
with respect to the WAPE error metric. For the Ex-
changeRate dataset, the individual approach (SMFA)
outperforms other approaches, whereas a variation
of the SOM algorithm (CBFA.SOM
4
) produces the
second-best results. For the NN5 dataset, a clus-
tering approach (CBFA.SOM
5
) is the most effective
approach, followed by another clustering approach
CBFA.OPTICS
1
. As for the solarEnergy dataset,
the most notable approach is the unique approach
(GMFA), which is trailed by a clustering approach
(CBFA.OPTICS
3
). For the Traffic-metr-la dataset, the
individual approach (SMFA) achieves the best results,
with a clustering approach (CBFA.K-Means) falling
behind it. As for the WekiWebTraffic dataset,the
unique approach (GMFA) claims first spot while a
clustering approach (CBFA.OPTICS
3
) settles for sec-
ond place. At last, as for the Traffic-perms-bay
dataset, a clustering approach (CBFA.OPTICS
3
) out-
performs other approaches and the unique approach
(GMFA) achieved the second-best results.
In general, the clustering forecasting approaches
(CBFA) perform best on 2 out of 6 datasets (NN5,
Traffic-perms-bay) and maintain second place on 5
out of 6 datasets (ExchangeRate, NN5, SolarEnergy,
Traffic-metr-la and WikiWebTraffic). In other words,
the clustering approaches are either the first and the
second-best approach at every instance, in terms of
accuracy. The second-best performing approach tend
to be the SMFA, outdoing other approaches on 2 out
of the 6 datasets (ExchangeRate and Traffic-metr-
la) approach followed by the GMFA approach (So-
larEnergy and WikiWebTraffic). Amongst all clus-
tering approaches, those proposed by the OPTICS
(CBFA.OPTICS) clustering algorithm tend to lead
to better results, followed by those generated by the
SOM and K-Means algorithms respectively.
Table 5: Forecasting Approaches’ Average WAPE Error.
Datasets 1st approach 2nd approach
ExchangeRate SMFA CBFA.SOM
4
NN5 CBFA.SOM
5
CBFA.OPTICS
1
SolarEnergy GMFA CBFA.OPTICS
3
Traffic-metr-la SMFA CBFA.K-Means
WikiWebTraffic GMFA CBFA.SOM
3
Traffic-perms-bay CBFA.OPTICS
3
SMFA
5.1.1 Neural Networks’ Average WAPE Results
Each neural network produces 10 predictions, which
each prediction being of a horizon of 20 samples and
being evaluated by the WAPE metric. In order to es-
timate the overall forecasting performance of a model
on a dataset, the average error across all 10 predic-
tions is computed.
Table 6 summarizes the results portrayed in radar
chart depicted in figure 5, by highlighting the two
leading neural networks architectures, in terms of av-
erage WAPE error for each dataset. The RNN model
achieves best results on the ExchangeRate dataset. On
the NN5 dataset, the LSTM model beats the other
models and on the Traffic-metr-la dataset, its the GRU
model the comes out on top. Finally, CNN-GRU
model outperforms its competitors on the SolarEn-
ergy, WikiWebTraffic and Traffic-perms-bay datasets.
Overall, the CNN-GRU model performs best on
the 3 largest out 6 datasets (SolarEnergy, WikiWeb-
Traffic and Traffic-perm-bay), with respect to the av-
erage WAPE error metric, which suggest that the
model is more suitable for larger datasets. The model
with the highest average WAPE error consistently re-
mains the CNN model. Moreover, the findings show
that the CNN model tend to be the worst in at least
Trade-off Clustering Approach for Multivariate Multi-Step Ahead Time-Series Forecasting
145

3 out of 6 datasets (NN5, SolarEnergy and Traffic-
perms-bay). Furthermore, the spider figures showed
in 5 go to show the sporadic nature of the LSTM
model illustrated on the WikiWebTraffic dataset. In-
deed, although the LSTM model occasionally out-
shines its adversaries, e.g., on the NN5 dataset, it can
substantially become the worst model by a wide mar-
gin e.g., on the WikiWebTraffic dataset, with a WAPE
error 3 times higher (2,44) than the highest observed
CNN-GRU WAPE error (0,77) for the WikiWebTraf-
fic dataset.
Table 6: Neural Network Models’ Average WAPE Error.
Datasets 1st Model 2nd Model
ExchangeRate RNN GRU
NN5 LSTM GRU
SolarEnergy CNN-GRU MLP
Traffic-metr-la GRU CNN
WikiWebTraffic CNN-GRU MLP
Traffic-perms-bay CNN-GRU MLP
5.1.2 Forecasting Approaches and Models’
Lowest WAPE Results
The results obtained for each dataset are described in
the radar figures 5 . The table 7 summarizes the re-
sults portrayed in radar charts 5, by highlighting the
two leading forecasting approaches and models, in
terms of lowest WAPE error for each dataset. As a
whole, the clustering approaches tend to produce the
finest results by ranking first on 3 out of 6 datasets
(ExchangeRate, NN5, WikiWebTraffic). The SMFA
approach trails the clustering approaches by ranking
second-best on 3 out of 6 datasets (ExchangeRate,
Traffic-metr-la et WikiWebTraffic).The MU approach
also achieves good results by ranking first on 2 out
of 6 datasets (SolarEnergy and Traffic-perms-bay).
As far as the neural networks models are concerned,
the results clearly show that the CNN-GRU model
outperforms its rivals by ranking first on 5 out of
6 datasets (ExchangeRate, NN5, SolarEnergy, Wiki-
WebTraffic, Traffic-perms-bay). The podium is com-
pleted by the LSTM and GRU neural network models.
Once again, the clustering approaches proposed by
the OPTICS algorithm produce good results on two
datasets (NN5, and WikiWebTraffic).
Table 7: Neural Network Models’ Lowest WAPE Error.
Datasets 1st Model/Approach 2nd Model/Approach
ExchangeRate CNN-GRU-(CBFA.SOM
4
) RNN (SMFA)
NN5 CNN-GRU (CBFA.OPTICS
1
) GRU (SMFA.OPTICS
1
)
SolarEnergy CNN-GRU (MU) MLP (MU)
Traffic-metr-la LSTM (SMFA) CNN (SMFA)
WikiWebTraffic CNN-GRU (CBFA.OPTICS
1
) GRU (SMFA)
Traffic-perms-bay CNN-GRU (MU) LSTM (MU)
5.2 Completion Time
5.2.1 Forecasting Approaches’ Completion Time
Results
Figure 7 shows the execution time (in hours) per fore-
casting approach presented for our 6 datasets. The
total execution time of an approach is estimated by
summing up the completion time for all 6 neural net-
work models of that approach. As we can observe,
among all approaches , the global model forecasting
approach (GMFA) dominates its rivals by achieving
substantially better results than its opponents, across
all datasets probably due to parallel processing tak-
ing place, making it undoubtedly the dominant choice
when completion time is the most crucial factor. For
example, for the ExchangeRate dataset, the GMFA
approach’s execution time is 0.06 hrs (3.6 minutes),
making it the faster approach for that dataset while the
slowest one is the SMFA approach with an execution
time of 0.55 hrs (32.4 minutes) Another illustrating
example is on the Traffic-perms-bay dataset, where
the GMFA is almost 185 times faster (0.79 hrs) than
the SMFA approach (145.94 hrs). Amongst the clus-
tering approaches, the CBFA. The CBFA.K-Means
approach tends to be the most time-consuming on 4
of the 6 datasets and the CBFA.OPTICS approach ap-
pears to be the least time-consuming clustering ap-
proach. Unsurprisingly, the worst approach in terms
of execution across all datasets is the SMFA approach,
finishing last at every instance. This is due to the fact
that this approach individually processes each time-
series in a dataset.
5.2.2 Neural Networks’ Completion Time
Results
Figure 8 displays the completion time (in hours) per
neural network model for our 6 datasets. The com-
pletion time for each model is estimated by sum-
ming up the completion time for each model across
all approaches. The results show that CNN-GRU is
the most time-intensive model across all datasets and
conversely MLP has been the least costly neural net-
work model time-wise across all datasets. For exam-
ple, on the Traffic-metr-la dataset, the MLP model
(2.07 hours) is 16 times faster than the CNN-GRU
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
146

0.54
0.94
26.79
60.35
6.69
145.94
0.06
0.01
0.26
0.44
0.01
0.79
0.27
0.68
1.73
29.47
4.04
67.12
0.54
0.1
1.85
7.47
0.34
11.66
0.07
0.09
1.06
5.39
0.12
2.12
Execution Time (hours)
Datasets
0
20
40
60
80
100
120
140
ExchageRate NN5 SolarEnergy Traffic-metr-la WikiWebTraffic Traffic-perms-bay
SMFA GMFA CBFA.KMEANS CBFA.SOM CBFA.OPTICS
Figure 7: Forecasting Approaches’ Average Completion
Time.
model (34.08 hours). The podium is respectively
completed by CNN, RNN, LSTM and GRU neural
network models. The findings is quite consistent
across all 6 datasets.
0.03
0.08
0.94
2.08
0.57
4.42
0.22
0.27
6.39
14.28
1.63
31.98
0.34
0.41
10.53
23.66
2.4
53.25
0.37
0.44
11.32
25.65
2.61
56.25
0.05
0.09
1.5
3.38
0.62
7.2
0.49
0.57
15.03
34.09
3.4
74.56
Datasets
Execution Time (hours)
ExchageRate NN5 SolarEnergy Traffic-metr-la WikiWebTraffic Traffic-perms-bay
0
20
40
60
80
MLP
RNN LSTM GRU CNN CNN_GRU
Figure 8: Deep Neural Networks’ Average Execution Time.
6 CONCLUSION
In this paper, we have conducted a comparative evalu-
ation of 3 time-series forecasting approaches, that is,
the single model forecasting approach (SMFA), the
global model forecasting approach (GMFA) and the
cluster-based forecasting approach (CBFA). To our
knowledge, there has not been any comparative eval-
uation of these three approaches with the implemen-
tation of multiple state-of-art time-series deep neural
networks.
When it comes to determining the best forecast-
ing approach, there is a trade-off to be made between
the three forecasting approaches. The single model
forecasting approach (SMFA) achieves good results
in terms of accuracy but is the most time-consuming
approach. The global model forecasting approach
(GMFA) is the least accurate approach but by far the
most time-saving one. The cluster approach appears
to be a good compromise between SMFA and GMFA,
as it produces good results with respect to the WAPE
metric and is not as time-consuming as the SMFA ap-
proach. The same goes with choosing a neural net-
work model, the neural network model with the best
completion time is the MLP model but the most ac-
curate one is the (CNN-GRU) model which happens
to be the most time-consuming one. Identifying the
appropriate approach and/or model should depend on
the application context, the tasks at hand, the require-
ments and constraints in terms of accuracy and com-
pletion time.
In future work, we intend to enhance our work
by implementing and comparing more recent state-of-
the-art forecasting models, such as, deep state space
models, representation learning models and attention-
based transformers for time-series forecasting. An-
other extension of our work would be to consider
dataset with various time-series lengths instead of
only equal-length time-series. Another interesting
work would be to propose novel time-series forecast-
ing approaches and compare them to current ones.
ACKNOWLEDGEMENTS
We would like to extend our gratitude to the company
Teleric, located in Amiens, France, a major player in
the field of connected traceability in the cleaning mar-
ket, that supported our study. We would also like to
thank the Region Hauts-de-France for providing the
resources necessary to carry out this study.
REFERENCES
Aghabozorgi, S., Shirkhorshidi, A. S., and Wah, T. Y.
(2015). Time-series clustering–a decade review. In-
formation Systems, 53:16–38.
Ankerst, M., Breunig, M. M., Kriegel, H.-P., and Sander, J.
(1999). Optics: Ordering points to identify the clus-
tering structure. ACM Sigmod record, 28(2):49–60.
Asadi, R. and Regan, A. C. (2020). A spatio-temporal de-
composition based deep neural network for time series
forecasting. Applied Soft Computing, 87:105963.
Bandara, K., Bergmeir, C., and Smyl, S. (2020). Fore-
casting across time series databases using recurrent
neural networks on groups of similar series: A clus-
tering approach. Expert systems with applications,
140:112896.
Box, G. E. (1970). Gm jenkins time series analysis: Fore-
casting and control. San Francisco, Holdan-Day.
Trade-off Clustering Approach for Multivariate Multi-Step Ahead Time-Series Forecasting
147

Chandra, R., Goyal, S., and Gupta, R. (2021). Evaluation of
deep learning models for multi-step ahead time series
prediction. IEEE Access, 9:83105–83123.
Cherif, A., Cardot, H., and Bon
´
e, R. (2011). Som time
series clustering and prediction with recurrent neural
networks. Neurocomputing, 74(11):1936–1944.
Franceschi, J.-Y., Dieuleveut, A., and Jaggi, M. (2020). Un-
supervised scalable representation learning for multi-
variate time series.
Grigsby, J., Wang, Z., and Qi, Y. (2021). Long-range
transformers for dynamic spatiotemporal forecasting.
arXiv preprint arXiv:2109.12218.
Hewamalage, H., Bergmeir, C., and Bandara, K. (2021).
Recurrent neural networks for time series forecast-
ing: Current status and future directions. International
Journal of Forecasting, 37(1):388–427.
Karunasinghe, D. S. and Liong, S.-Y. (2006). Chaotic time
series prediction with a global model: Artificial neural
network. Journal of Hydrology, 323(1-4):92–105.
Kohonen, T. (1982). Self-organized formation of topolog-
ically correct feature maps. Biological cybernetics,
43(1):59–69.
Lara-Ben
´
ıtez, P., Carranza-Garc
´
ıa, M., and Riquelme, J. C.
(2021). An experimental review on deep learning ar-
chitectures for time series forecasting. International
journal of neural systems, 31(03):2130001.
Liao, T. W. (2005). Clustering of time series data—a survey.
Pattern recognition, 38(11):1857–1874.
Liu, F. and Deng, Y. (2020). Determine the number of un-
known targets in open world based on elbow method.
IEEE Transactions on Fuzzy Systems, 29(5):986–995.
Mart
´
ınez-Rego, D., Fontenla-Romero, O., and Alonso-
Betanzos, A. (2011). Efficiency of local models en-
sembles for time series prediction. Expert Systems
with Applications, 38(6):6884–6894.
Marutho, D., Handaka, S. H., Wijaya, E., et al. (2018).
The determination of cluster number at k-mean us-
ing elbow method and purity evaluation on headline
news. In 2018 international seminar on applica-
tion for technology of information and communica-
tion, pages 533–538. IEEE.
Montero-Manso, P. and Hyndman, R. J. (2021). Principles
and algorithms for forecasting groups of time series:
Locality and globality. International Journal of Fore-
casting, 37(4):1632–1653.
Oussous, A., Benjelloun, F.-Z., Lahcen, A. A., and Belfkih,
S. (2018). Big data technologies: A survey. Journal
of King Saud University-Computer and Information
Sciences, 30(4):431–448.
Pan, M., Zhou, H., Cao, J., Liu, Y., Hao, J., Li, S., and Chen,
C.-H. (2020). Water level prediction model based on
gru and cnn. Ieee Access, 8:60090–60100.
Papacharalampous, G., Tyralis, H., and Koutsoyiannis, D.
(2018). Univariate time series forecasting of tempera-
ture and precipitation with a focus on machine learn-
ing algorithms: A multiple-case study from greece.
Water resources management, 32(15):5207–5239.
Pavlidis, N. G., Plagianakos, V. P., Tasoulis, D. K., and Vra-
hatis, M. N. (2006). Financial forecasting through
unsupervised clustering and neural networks. Oper-
ational Research, 6(2):103–127.
Rangapuram, S. S., Seeger, M. W., Gasthaus, J., Stella, L.,
Wang, Y., and Januschowski, T. (2018). Deep state
space models for time series forecasting. Advances in
neural information processing systems, 31.
Rani, S. and Sikka, G. (2012). Recent techniques of cluster-
ing of time series data: a survey. International Journal
of Computer Applications, 52(15).
Sajjad, M., Khan, Z. A., Ullah, A., Hussain, T., Ullah, W.,
Lee, M. Y., and Baik, S. W. (2020). A novel cnn-gru-
based hybrid approach for short-term residential load
forecasting. Ieee Access, 8:143759–143768.
Sen, R., Yu, H.-F., and Dhillon, I. S. (2019). Think glob-
ally, act locally: A deep neural network approach to
high-dimensional time series forecasting. Advances
in neural information processing systems, 32.
Sfetsos, A. and Siriopoulos, C. (2004). Time series fore-
casting with a hybrid clustering scheme and pattern
recognition. IEEE Transactions on Systems, Man, and
Cybernetics-Part A: Systems and Humans, 34(3):399–
405.
Stoean, R., Stoean, C., Becerra-Garc
´
ıa, R., Garc
´
ıa-
Berm
´
udez, R., Atencia, M., Garc
´
ıa-Lagos, F.,
Vel
´
azquez-P
´
erez, L., and Joya, G. (2020). A hy-
brid unsupervised—deep learning tandem for elec-
trooculography time series analysis. Plos one,
15(7):e0236401.
Syakur, M., Khotimah, B., Rochman, E., and Satoto, B. D.
(2018). Integration k-means clustering method and
elbow method for identification of the best customer
profile cluster. In IOP conference series: materials
science and engineering, volume 336, page 012017.
IOP Publishing.
Tadayon, M. and Iwashita, Y. (2020). A clustering approach
to time series forecasting using neural networks: A
comparative study on distance-based vs. feature-based
clustering methods. arXiv preprint arXiv:2001.09547.
Wan, R., Mei, S., Wang, J., Liu, M., and Yang, F. (2019).
Multivariate temporal convolutional network: A deep
neural networks approach for multivariate time series
forecasting. Electronics, 8(8):876.
Wang, S. and Jiang, J. (2015). Learning natural language
inference with lstm. arXiv preprint arXiv:1512.08849.
Yatish, H. and Swamy, S. (2020). Recent trends in
time series forecasting–a survey. International Re-
search Journal of Engineering and Technology (IR-
JET), 7(04):5623–5628.
Yu, J., Zhang, X., Xu, L., Dong, J., and Zhangzhong, L.
(2021). A hybrid cnn-gru model for predicting soil
moisture in maize root zone. Agricultural Water Man-
agement, 245:106649.
Zhang, Y., Luo, L., Yang, J., Liu, D., Kong, R., and Feng, Y.
(2019). A hybrid arima-svr approach for forecasting
emergency patient flow. Journal of Ambient Intelli-
gence and Humanized Computing, 10(8):3315–3323.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
148
