
Two-Step Graph Classification on the Basis of Hierarchical Graphs
Anthony Gillioz
a
and Kaspar Riesen
b
Institute of Computer Science, University of Bern, Switzerland
Keywords:
Structural Pattern Recognition, Graph Matching, Centrality Measures, Hierarchical Graph Matching.
Abstract:
A common method to solve the non-trivial task of classifying general graphs is to employ graph matching
in conjunction with a distance- or similarity-based classifier. Unfortunately, optimal graph matching has a
high computational complexity hindering its application on large graphs. In order to make matchings also
feasible for larger graphs, it has been proposed to work on size-reduced graphs rather than on their original
counterparts. In the present paper, we propose a novel method that is based on this idea to further reduce
the processing time. In particular, we change the standard classification scheme into a two-step classification
method. In the first step, we start with strongly reduced versions of the graphs – having a manageable amount
of nodes – in order to prune as many graphs as possible. The second step – the actual classification – is then
performed on the remaining graphs only (in their original size). We conduct experimental evaluations on five
datasets to research the benefits and limitations of this novel two-step graph classification method. The main
finding is that we can substantially speed up the graph matching while preserving satisfying classification
accuracy.
1 INTRODUCTION
In its most general formulation, a graph is a finite
set of basic entities (modeled by means of nodes),
together with a set of relations that might exist be-
tween pairs of these basic entities (modeled by means
of edges). Hence, the power of this data structure re-
lies not only on the properties of the individual nodes
but also – and maybe even more importantly – on the
relations between the nodes. Graphs are actually uni-
versal representational systems and provide a mathe-
matical framework that can be used to study and learn
from diverse real-world structures (Conte et al., 2004;
Foggia et al., 2014). That is, graph structures can be
exploited to represent data in a broad variety of ap-
plications, such as Bioinformatics (de Ridder et al.,
2013), Social Media Analysis (Pitas, 2016), and Net-
work Analysis (Newman, 2010), to name just three
prominent examples.
Graph matching is one of the most fundamen-
tal problems in graph-based pattern recognition. It
aims at identifying shared substructures in two graphs
and evaluating the degree of similarity or dissimilar-
ity between them. Considering the influence of graph
matching in miscellaneous pattern recognition appli-
cations, it is crucial to develop and research efficient
a
https://orcid.org/0000-0001-7352-3708
b
https://orcid.org/0000-0002-9145-3157
procedures for this task.
A standard method to perform graph matching is
Graph Edit Distance (GED) (Bunke and Allermann,
1983; Sanfeliu and Fu, 1983). GED quantifies a graph
dissimilarity on the basis of the minimum amount
of modification required to transform a source graph
into a target graph. The authors of (Garey and John-
son, 1979; Abdulrahim, 1998) show that the compu-
tation of GED is, in its general formulation, an N P -
complete problem. Therefore, matching large graphs
by means of GED is often not feasible or at least com-
putationally demanding. This in turn prevents the ap-
plication of GED in both real-time data analysis and
large-scale pattern recognition tasks.
Over the last decade, however, researchers have
proposed different approximations to reduce the run-
time of GED (Riesen and Bunke, 2009; Blumen-
thal et al., 2021). These approximations substantially
reduce the computational complexity of GED. Yet,
even with these polynomial time algorithms, the ap-
plication of GED remains problematic – in particu-
lar for large graphs with many nodes and/or many
edges. Another appealing idea to reduce the compu-
tation time of graph-based pattern recognition is to
work with reduced versions of the graphs rather than
their original counterparts. This approach can roughly
be split into two categories, viz. Hierarchical Graph
Representations (Brun et al., 2020) and Graph Sum-
marizations (Liu et al., 2018).
296
Gillioz, A. and Riesen, K.
Two-Step Graph Classification on the Basis of Hierarchical Graphs.
DOI: 10.5220/0011657000003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 296-303
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

The basic idea of hierarchical graph represen-
tations is that the original graphs are more and
more compressed as the number of levels increases.
Thereby, at the highest level, only an abstraction of
the graphs remains and eases the manipulation and
the analysis of complex structural data. Graph sum-
marization, on the other hand, is mainly used to dis-
cover complex patterns in graphs. This method con-
sists of determining each node’s importance or perti-
nence in the graph structure, and ultimately discard-
ing the nodes with the lowest importance in a sam-
pling strategy.
In the present paper, we propose and research
an extension of a recent graph matching framework
that makes use of a systematical reduction strategy
(Gillioz and Riesen, 2022). The major drawback of
this (as well as any other) reduction method is the loss
of information when nodes are discarded. Indeed, in
(Gillioz and Riesen, 2022) it is shown that strongly
reduced graphs result in significant deteriorations of
the general classification accuracy. We propose two
distinct modifications to the classification procedure
to mitigate this effect. The two strategies are embed-
ded in a two-step distance-based classifier where the
first step relies on the strongly reduced graphs. The
goal of this first step is to get a rough estimate of the
pairwise distances as fast as possible and make large
parts of the graphs obsolete for the second step. In
the second step, we perform both matching and clas-
sification only on those original graphs which have
actually passed the first step.
The remainder of the present paper is structured as
follows. In Section 2, we briefly review the previous
work done in the field of graph matching, along with a
formal definition of GED. In Section 3, we explain the
details of our graph pruning strategy as well as how it
can be embedded in a two-step classification scheme.
We present the setup of the experiments and discuss
the main results in Section 4. In the last section, we
conclude the paper and suggest possible extensions
for future work.
2 RELATED WORK
In this section, we briefly describe and review three
related areas to our work, namely the graph matching
methods in general, GED (the graph matching method
actually employed in this paper), and frameworks re-
lying on reduced graphs.
2.1 Graph Matching
Graph matching is the process of finding a mapping
between the nodes and edges of two graphs satisfying
some constraints in order to find common substruc-
tures in both graphs. Graph matching algorithms are
commonly categorized into two groups, namely, exact
graph matching and inexact graph matching.
Exact matching methods try to assess whether or
not two graphs are strictly identical or share – par-
tially – common subparts. On the other hand, inexact
graph matching relaxes the matching constraints and
allows a more subtle comparison between completely
non-identical graphs. Hence, the latter paradigm is
typically more appropriate for real-world problems,
where the transcription of the graphs from the ob-
served patterns may contain noise and errors.
Through the years various methods have been pro-
posed to perform inexact graph matching. We briefly
review three prominent families of graph match-
ing techniques. For a more thorough review refer
to (Conte et al., 2004; Foggia et al., 2014).
Spectral methods (Qiu and Hancock, 2006; Caelli and
Kosinov, 2004) form an important branch of inexact
graph matching techniques. These methods basically
use spectral properties of the underlying graph matri-
ces (i.e., the eigenvectors and eigenvalues of the Ad-
jacency and/or Laplacian matrix) to construct a vector
space onto which the nodes of the graphs or the com-
plete graphs are projected. This vector space embed-
ding is then used to find potential matches between
the underlying graphs.
Graph kernels (Kriege et al., 2020) are a second
prominent family of graph matching methods. Graph
Kernels can be seen as an implicit embedding of the
graphs into a feature space. In particular, kernel func-
tions on graphs can be interpreted as an inner prod-
uct in a feature space and can thus be considered as
a similarity metric for graphs. Diverse graph kernels
have been proposed in the literature. Many of them
rely on certain substructures that can be found in both
graphs. For instance, random walk kernels (Kashima
et al., 2003) are defined on the basis of similar walks
– sequences of nodes with allowed repetition – in two
graphs.
Neural Networks (Wu et al., 2021) forms the most re-
cent category of graph matching methods. The ba-
sic idea is that a neural network learns from the in-
put data how to map graphs toward a compact vector
representation and use that representation to compute
similarity. In (Riba et al., 2021), for instance, a graph
similarity metric is directly computed by means of a
graph neural network.
Two-Step Graph Classification on the Basis of Hierarchical Graphs
297

2.2 Graph Edit Distance
Graph Edit Distance (GED) (Bunke and Allermann,
1983; Sanfeliu and Fu, 1983) is a more traditional
graph matching technique. However, due to its great
adaptability, several more recent research projects
are concerned with this particular dissimilarity mea-
sure (Cort
´
es and Serratosa, 2015; Riesen et al., 2016;
Blumenthal et al., 2021).
When comparing two graphs g
1
and g
2
, GED
computes the minimum amount of edit operations
necessary to convert g
1
to g
2
. In its original definition,
only three edit operations (namely insertions, dele-
tions, and substitutions) are allowed on both nodes
and edges. Employing those edit operations, GED
computes an edit path λ(g
1
, g
2
) between g
1
and g
2
as a set {e
1
, ..., e
k
} of k edit operations e
i
that com-
pletely transform g
1
into g
2
. A cost function c(·) is
commonly defined to weigh the strength of each edit
operation, and GED finds the edit path that minimizes
the overall cost.
The combinatorial nature of GED makes it diffi-
cult to be applied on large graphs, and thus diverse
GED approximations have been proposed. In the
present paper, we make use of (Riesen and Bunke,
2009) as a basic graph matching framework.
2.3 Hierarchical Graph Matching
The overarching aim of the present paper is to employ
GED approximation (Riesen and Bunke, 2009) in
conjunction with reduced graphs (Gillioz and Riesen,
2022) in order to define a two-step classification pro-
cedure. Hence, closely related to the approach pro-
posed in the present paper is hierarchical graph repre-
sentations. In the context of image segmentation, hi-
erarchical graph representations consist of computing
multilevel representations of images, where each of
the levels represents different semantic properties like
texture or color (Haxhimusa and Kropatsch, 2004).
This representation can then be used, for instance, to
find boundaries between regions in an image.
In a pattern recognition context, the authors
of (Dutta et al., 2020) propose a hierarchical graphlet
embedding. In particular, graphs are embedded into
a feature space and a graph clustering method is then
employed to find the nodes to combine in order to cre-
ate a graph hierarchy. Thereby, the resulting represen-
tation encodes the abstract information and maintains
the relationship with the original graph.
In (Riba et al., 2020), a coarse-to-fine graph
matching is proposed which is also similar in spirit to
our approach. The idea is to represent graphs as pyra-
mids where each level contains different types of in-
formation. The subgraph representations at the lower
levels carry coarse information (i.e., the global struc-
ture) and those at the higher levels contain more fine
information (i.e., the detailed structure). The graph
matching is then performed in a coarse-to-fine fashion
to prune graphs during the low-level comparisons.
3 TWO-STEP GRAPH
CLASSIFICATION
One of the standard processes in graph classifica-
tion is based on computing graph dissimilarities in
conjunction with a distance-based classifier (e.g. a k-
Nearest Neighbor (K-NN) classifier). One of the main
contributions of the present paper is to modify this
standard classification process into a two-step classifi-
cation scheme. To this end, we make use of a method
that systematically reduces the size of graphs (intro-
duced in (Gillioz and Riesen, 2022)).
More formally, before the classification starts, the
underlying graphs are preprocessed as follows. First,
we measure the node centrality in order to quantify
each node’s importance on the overall graph structure.
Several node centrality measures could be employed
for this task (e.g., PageRank (Brin and Page, 1998)
and Betweenness (Freeman, 1977)). For the sake of
conciseness, we only use PageRank in the present pa-
per. Eventually, the computed PageRank importance
is used to discard the nodes with the least impact on
the graph structure.
The relative amount of nodes, that actually remain
in the graphs after the reduction process, is controlled
via a user-defined parameter. In the present paper, we
propose to reduce the size of the graphs by a wide
margin and keep only 20% of the total nodes. Hence,
for each pattern to recognize we now have two differ-
ent representations, namely the original graph g and
the reduced graph g
′
(containing the most important
nodes only).
In the proposed framework the size-reduced and
original graphs are now employed in two separate
steps. The basic idea of the first step is to conduct
all matchings on the strongly reduced graphs. Then,
in the second step, we conduct as few matchings as
possible on the original graphs. Hence, our method
can also be interpreted as a coarse-to-fine approach
that starts on rather coarse representations and even-
tually continues on the more fine-grained graph repre-
sentations – similar to the approach presented in (Riba
et al., 2020).
However, our approach differs in three major parts
with (Riba et al., 2020). First, we use node centrality
measures (rather than node clustering) for graph re-
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
298

ductions. Second, we employ only two levels of hier-
archy (since we primarily aim at speeding up the clas-
sification process). Third, we propose two different
strategies for the crucial decision on how to proceed
after step 1. The first strategy is to select appropri-
ate candidates in the reduced graph space for further
processing. The second strategy is to accept the clas-
sification obtained in the reduced graph space if the
classifier is confident enough. Both strategies are de-
scribed in greater detail in the next two subsections.
Regardless of the strategy actually employed, the
proposed two-step classification scheme allows us to
trade off between run-time and classification accu-
racy. That is, pruning numerous graphs in the first
step allows a faster computation time but possibly
deteriorates the classifier’s accuracy. Contrariwise,
keeping many graphs for the second step possibly al-
lows better classification accuracy but might increase
the computation time.
3.1 Candidate Selection Strategy
The aim of this strategy is as follows. Based on
the matching information obtained on the reduced
graphs, we keep the nearest training graphs for each
test graph. We term these nearest neighbors – actu-
ally used in step 2 – as candidates. We define a pa-
rameter ω that defines the relative amount of training
graphs that are selected as candidates for step 2. With
ω = 0.1, for instance, we select 10% of the nearest
training graphs as candidates for each test graph.
The second step of the classification process is
based on the original graphs. That is, the test graphs
are matched with the original graphs that correspond
to the selected candidates from step 1. Intuitively, step
1 acts as a filter that pre-selects plausible candidates
from the training set for further and more precise in-
vestigations during step 2.
The complete process – termed CandSel(ω) from
now on – is formalized in Alg. 1. The algorithm
takes as parameters a test graph in two represen-
tations t and t
′
(the original and the size-reduced
graph), as well as N original training graphs G =
{g
(1)
, . . . , g
(N)
} and their corresponding reduced ver-
sions G
′
= {g
′
(1)
, . . . , g
′
(N)
}. Note that we use a K-NN
classifier on line 9 of the algorithm. However, any
other distance or similarity-based classification could
be employed as well.
3.2 Early Classification Strategy
In this second strategy, we first apply a K-NN classi-
fication on the reduced graphs. All graphs for which
the classification is — more or less — confident, are
Algorithm 1: CandSel(ω).
1 STEP 1
2 n = ⌊ω · N⌋ // number of candidates
3 for all g
′
∈ G
′
do
4 compute GED d(t
′
, g
′
)
5 end
6 C
′
= {g
′
(1)
, . . . , g
′
(n)
} // n graphs in G
′
with smallest distances to t
′
7 C = {g
(1)
, . . . , g
(n)
} // corresponding
graphs in G
8 STEP 2
9 Classify t with the aid of the selected
candidates C = {g
(1)
, . . . , g
(n)
}
directly classified without further processing in step
2. Formally, we measure the confidence of each deci-
sion by means of the number of neighbors k
′
among
the k-nearest neighbors that stem from the same class
(with k
′
≤ k). If k
′
is greater than, or equal to, a cer-
tain threshold δ we consider the class prediction as
confident enough to be accepted.
Considering a 5-NN, for instance, and we set δ =
4, then at least four of the nearest neighbors have to
stem from the same class so that the graph is classi-
fied in the first step
1
. Note that this strategy directly
depends on the classifier actually employed. That is,
when this strategy is used in conjunction with another
distance-based classifier, another metric for the confi-
dence has to be defined first.
For any reduced graph t
′
that is not classified in the
first step (due to too-low classification confidence),
the classification is conducted on its original counter-
part t. That is, we have to compute all distances from
t to all original training graphs to apply a final K-NN
classification. We formalize the proposed procedure
– termed EarlyClass(δ) from now on – in Alg. 2.
4 EXPERIMENTAL EVALUATION
4.1 Datasets
We evaluate our classification procedure on two
datasets from the IAM graph repository (Riesen and
Bunke, 2008)
2
(AIDS, Mutagenicity) and on three
datasets from TUDataset (Morris et al., 2020)
3
(NCI1,
Proteins, IMDB-Binary). Table 1 shows some graph
properties such as the number of graphs, the number
1
Note that for a binary classification task with a 5-NN,
it makes no sense to set δ ≤ 3 because all samples would be
immediately classified in the first step.
2
www.iam.unibe.ch/fki/databases/iam-graph-database
3
http://www.graphlearning.io/
Two-Step Graph Classification on the Basis of Hierarchical Graphs
299

Algorithm 2: EarlyClass(δ).
1 STEP 1
2 for all g
′
∈ G
′
do
3 compute GED d(t
′
, g
′
)
4 end
5 C
′
= {g
′
(1)
, . . . , g
′
(k)
} // k graphs in G
′
with smallest distances to t
′
6 if number of graphs of majority class in
C
′
≥ δ then
7 Accept classification of t
′
8 else
9 STEP 2
10 Classify t with the aid of the original
training graphs G = {g
(1)
, . . . , g
(N)
}
11 end
of classes, and the average number of nodes and edges
per dataset.
The AIDS, Mutagenicity, and NCI1 graph datasets
represent molecules stemming from two classes. The
graphs in the AIDS dataset represent chemical com-
pounds that potentially have an effect against HIV,
the graphs in the Mutagenicity dataset represent
molecules that may have mutation properties, and the
graphs in the NCI1 dataset represent molecules that
are able to diminish the expansion of tumorous cells.
The graphs in the Proteins dataset correspond to pro-
tein structure elements stemming from two classes.
Finally, the IMDB-Binary dataset is a social network
dataset, where nodes represent actors/actresses and an
edge connects two actors/actresses if they appear in
the same movie. The classification task on this dataset
consists of identifying the genre of the graph repre-
senting a certain movie.
4.2 Results
The purpose of our experimental evaluation is
twofold. First, we aim at investigating the reduc-
tion of the computation time actually possible with
the proposed framework. Second, we want to evalu-
ate whether or not the classification accuracy can be
maintained when applying the two strategies in our
two-step classification procedure. Hence, we com-
pare both the run-time and the classification accuracy
obtained by our novel methods with a standard classi-
fication method, viz. a K-NN classifier that operates
on the original graphs only.
4.2.1 Candidate Selection
Table 2 shows both the classification accuracy and
the run-time for the reference system (i.e., a stan-
dard K-NN classifier operating in the original graph
space) and the novel method CandSel(ω) with ω ∈
{0.20, 0.10, 0.05}.
On all datasets, we observe that the classification
accuracy generally decreases as the parameter ω is
reduced (as expected). Simultaneously, we observe
substantial reductions in the run-times with increasing
values of ω. The run-time of our novel system with
ω = 0.10, for instance, is reduced to about 50% of the
run-times of the reference system on all datasets.
On the three datasets AIDS, NCI1 and IMDB-
Binary, we observe that the classification accuracy of
our novel approach is in general worse than the accu-
racy obtained by the reference system. We also see
that most of these deteriorations are statistically sig-
nificant (with the exception of the result obtained on
the AIDS dataset with ω = 0.10). However, we can
also report that at least on AIDS and NCI1 the clas-
sification accuracies obtained by means of our novel
system are in a fairly similar range as those of the ref-
erence system. Moreover, on the other two datasets,
viz. Mutagenicity and Proteins, not a single statisti-
cally significant deterioration compared to the refer-
ence system can be seen – on the contrary, we observe
one statistically significant improvement (on the Mu-
tagenicity dataset with ω = 0.20).
Overall these classification results of CandSel(ω)
are convincing and encouraging especially when con-
sidering the substantial decrease in the run-times of
our framework compared with the reference system.
4.2.2 Early Classification
Table 3 shows the classification accuracy and the run-
time achieved with the reference system and our novel
method EarlyClass(δ) that uses a 5-NN classifier in
conjunction with two thresholds δ ∈ {4, 5}
4
.
Likewise to the method CandSel(ω), the accura-
cies achieved with EarlyClass(δ) are – more or less
– comparable to the results of the reference system.
For instance, with δ = 5, the classification accuracy
remains statistically equivalent to the results obtained
with the reference system on all datasets. When the
threshold is reduced to δ = 4, the classification ac-
curacy achieved on Mutagenicity, NCI1, and IMDB-
Binary is statistically worse than the accuracy of the
reference system. Note, however, that our novel sys-
tem performs in a fairly similar range as the reference
system in all cases. Moreover, with δ = 4 we even
4
During the validation of the meta-parameters on the
AIDS dataset, we observe that in step 2 the graphs stem
from one class only. Hence, rather than performing a second
matching on these graphs, we decide to directly classify the
few graphs for which the second step is actually necessary.
Note that this applies on the AIDS dataset only.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
300
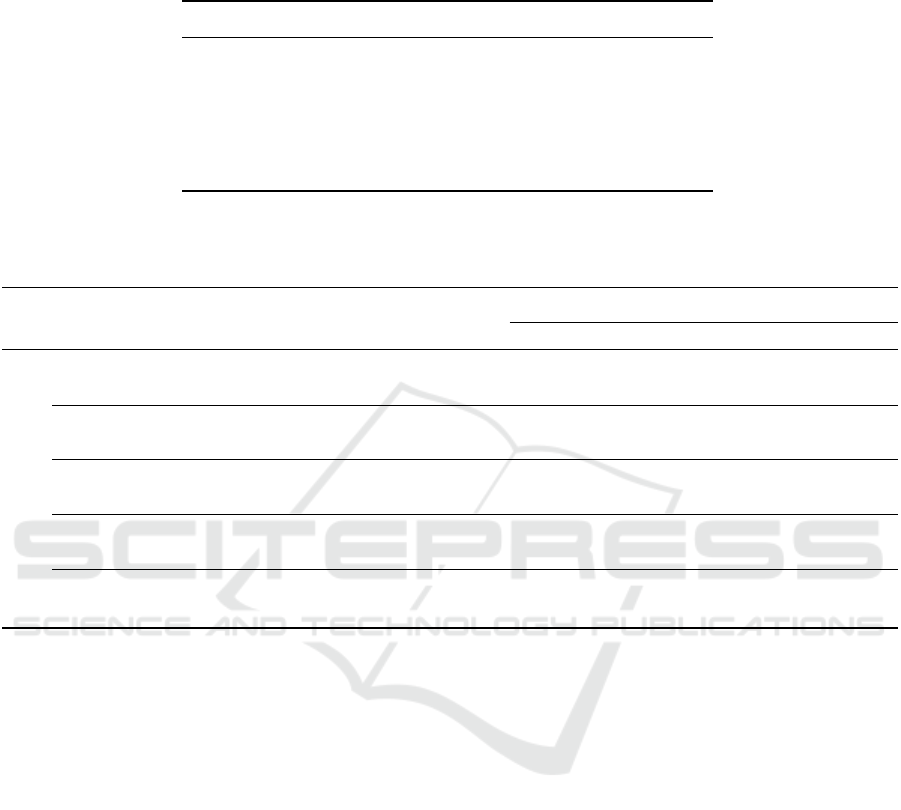
Table 1: Properties of the graph datasets. We show the size of the graph datasets (|G|) with the number of graphs in the
training, validation, and test set (|G
tr
|, |G
va
|, |G
te
|), the number of classes (|Ω|) and the average number of nodes and edges
per graph (
/
0|V |,
/
0|E|).
Dataset |G
G
G| (|G
G
G
tr
|, |G
G
G
va
|, |G
G
G
te
|) |Ω
Ω
Ω|
/
0
/
0
/
0|V |
/
0
/
0
/
0|E|
AIDS 2,000 (250, 250, 1,500) 2 9.5 10.0
Mutagenicity 4,337 (1,500, 500, 2,337) 2 30.3 30.8
NCI1 4,110 (1,500, 500, 2,110) 2 29.9 32.3
Proteins 1,113 (660, 220, 223) 2 39.1 72.8
IMDB-Binary 1,000 (600, 200, 200) 2 19.8 96.5
Table 2: Classification accuracy and run-time (in seconds) obtained with a K-NN classifier on the original graphs (Reference
System) and the results obtained with our novel method CandSel(ω) with ω ∈ {0.20, 0.10, 0.05}. (◦/•: statistically signifi-
cantly better/worse than the reference system).
Ref. System
CandSel(ω)
ω
ω
ω =
=
= 0
0
0.
.
.2
2
20
0
0 ω
ω
ω =
=
= 0
0
0.
.
.1
1
10
0
0 ω
ω
ω =
=
= 0
0
0.
.
.0
0
05
5
5
Dataset
AIDS
Acc [%] 98.53 97.53
•
98.80 96.53
•
Time [s] 16.93 7.56 5.62 4.99
Mutagenicity
Acc [%] 71.33 72.95
◦
72.02 70.60
Time [s] 63.27 48.70 41.99 36.90
NCI1
Acc [%] 70.33 69.24
•
68.96
•
68.15
•
Time [s] 56.32 43.10 34.05 29.38
Proteins
Acc [%] 73.82 70.82 70.82 71.24
Time [s] 7.09 3.88 2.88 1.97
IMDB-Binary
Acc [%] 66.00 59.50
•
58.50
•
55.50
•
Time [s] 4.32 3.67 2.03 2.26
observe a statistically significant improvement in the
classification accuracy on the Proteins dataset.
Regarding the run-times we also observe substan-
tial speed-ups of our method compared to the refer-
ence system. Using threshold δ = 4, for instance,
we observe a substantial decrease of the run-time of
about 40% on the datasets Mutagenicity, NCI1, and
Proteins. On the AIDS dataset, the run-time of our
method is even about five times faster than the run-
times of the reference system (mainly due to the omit-
ted second step on this dataset). Interestingly, we ob-
serve an increase in the run-time of our method on the
IMDB-Binary dataset. This result has encouraged us
to do some further research and investigations on the
behavior of the early classification strategy.
In Table 4 we show the number of actually clas-
sified graphs with EarlyClass(δ) (we focus on δ = 4)
and the corresponding classification accuracy in both
steps (step 1 and step 2).
We observe that in general, a large amount of the
graphs are classified during the first step. For in-
stance, on the AIDS dataset about 98% of the test
graphs are classified during the first step. For Muta-
genicity, NCI1, and Proteins, about 50% of the graphs
are instantly classified without any further computa-
tion. For IMDB-Binary, we observe that the majority
of the graphs are classified during the second step of
the algorithm, which might explain why the run-time
for this dataset increases. That is, on this particular
dataset, the computational overhead of our novel two-
step classification method cannot be compensated by
many early classifications.
When comparing the classification accuracies
achieved in step 1 and step 2 separately, we observe
that the classification accuracy decreases in general
in the second step (see, for instance, on AIDS, Muta-
genicity and Proteins). A possible explanation might
be that only the ”difficult” graphs remain to be classi-
fied during the second step.
Two-Step Graph Classification on the Basis of Hierarchical Graphs
301
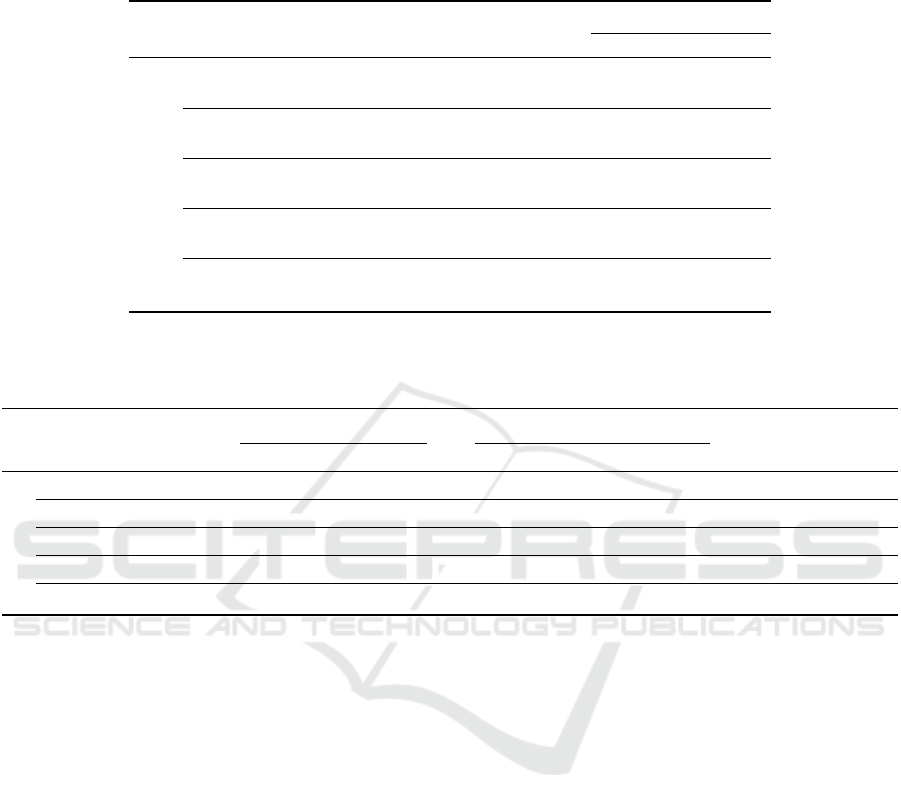
Table 3: Classification accuracy and run-time (in seconds) obtained with a K-NN classifier on the original graphs (Reference
System) and the results obtained with our novel method EarlyClass(δ) with δ ∈ {5, 4}. (◦/•: statistically significantly bet-
ter/worse than the reference system).
Ref. System
EarlyClass(δ)
δ
δ
δ =
=
= 5
5
5 δ
δ
δ =
=
= 4
4
4
Dataset
AIDS
Acc [%] 98.93 98.60 98.73
Time [s] 16.93 3.48 3.31
Mutagenicity
Acc [%] 71.63 71.07 68.12
•
Time [s] 62.83 60.07 39.00
NCI1
Acc [%] 70.52 70.56 68.15
•
Time [s] 56.32 54.22 33.78
Proteins
Acc [%] 73.82 75.1 75.54
◦
Time [s] 7.09 7.32 4.4
IMDB-Binary
Acc [%] 66.00 64.00 62.00
•
Time [s] 4.32 8.14 5.63
Table 4: Statistics drawn from the method EarlyClass(δ) with δ = 4. |G
te
| is the number of test graphs per dataset. #classified
and Acc refer to the number of graphs classified and the classification accuracy obtained, respectively (during that step). Final
Acc is the global classification accuracy obtained at the end of the classification process.
|G
G
G
te
|
Step 1 Step 2
Final Acc [%]
#classified Acc [%] #classified Acc [%]
Dataset
AIDS 1,500 1,479 98.78 21 95.24 98.73
Mutagenicity 2,337 1,182 70.73 1,155 65.45 68.12
NCI1 2,100 1,004 67.43 1,096 68.81 68.15
Proteins 233 133 78.95 100 71.00 75.54
IMDB-Binary 200 56 55.36 144 64.58 62.00
5 CONCLUSION AND FUTURE
WORK
In the present paper, we investigate the use of a graph
reduction method in a two-step classification scheme.
In particular, we propose two strategies (candidate se-
lection and early classification) that are applied on re-
duced graphs in order to speed up the complete clas-
sification procedure. Both modifications allow us to
control the trade-off between classification accuracy
and computation time.
With an empirical evaluation on five graph
datasets, we verify the computational advantages of
our novel two-step classification technique. That is
our pruning strategies substantially reduce the run-
time on all datasets. Moreover, we demonstrate that
by using strongly reduced graphs in a two-step pro-
cedure, it is possible to maintain reasonable classifi-
cation accuracy in general. Note that our approach is
in some cases and on some datasets even capable to
improve the classification accuracy of the reference
system.
Future investigations involve, for instance, the use
of ensemble methods that rely on different levels of
graph reductions. That is we plan to create multi-
ple sets of reduced graphs (e.g., in a bootstrapping
fashion). The variety created by the reduced graph
sets might help to decrease possible overfitting of the
classifiers and thus improve the overall classification
accuracy.
A natural idea to further reduce the matching time
and keep equivalent classification accuracies would
be to combine the two strategies proposed in the
present paper. That is, the first classification step can
be done with the early classification strategy. The
graphs with clear classification can then be accepted
as classified. For those with an ambiguous classifica-
tion, only the ⌊ω · N⌋-nearest training graphs are kept
as candidates for the second step.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
302

REFERENCES
Abdulrahim, M. (1998). Parallel algorithms for labeled
graph matching. PhD thesis, Colorado School of
Mines.
Blumenthal, D. B., Gamper, J., Bougleux, S., and Brun, L.
(2021). Upper bounding graph edit distance based on
rings and machine learning. Int. J. Pattern Recognit.
Artif. Intell., 35(8):2151008:1–2151008:32.
Brin, S. and Page, L. (1998). The anatomy of a large-scale
hypertextual web search engine. Comput. Networks,
30(1-7):107–117.
Brun, L., Foggia, P., and Vento, M. (2020). Trends in graph-
based representations for pattern recognition. Pattern
Recognit. Lett., 134:3–9.
Bunke, H. and Allermann, G. (1983). Inexact graph match-
ing for structural pattern recognition. Pattern Recog-
nit. Lett., 1(4):245–253.
Caelli, T. and Kosinov, S. (2004). An eigenspace projection
clustering method for inexact graph matching. IEEE
Trans. Pattern Anal. Mach. Intell., 26(4):515–519.
Conte, D., Foggia, P., Sansone, C., and Vento, M. (2004).
Thirty years of graph matching in pattern recognition.
Int. J. Pattern Recognit. Artif. Intell., 18(3):265–298.
Cort
´
es, X. and Serratosa, F. (2015). Learning graph-
matching edit-costs based on the optimality of the or-
acle’s node correspondences. Pattern Recognit. Lett.,
56:22–29.
de Ridder, D., de Ridder, J., and Reinders, M. J. T. (2013).
Pattern recognition in bioinformatics. Briefings Bioin-
form., 14(5):633–647.
Dutta, A., Riba, P., Llad
´
os, J., and Forn
´
es, A. (2020). Hi-
erarchical stochastic graphlet embedding for graph-
based pattern recognition. Neural Comput. Appl.,
32(15):11579–11596.
Foggia, P., Percannella, G., and Vento, M. (2014). Graph
matching and learning in pattern recognition in the last
10 years. Int. J. Pattern Recognit. Artif. Intell., 28(1).
Freeman, L. C. (1977). A Set of Measures of Central-
ity Based on Betweenness. Sociometry, 40(1):35–41.
Publisher: [American Sociological Association, Sage
Publications, Inc.].
Garey, M. R. and Johnson, D. S. (1979). Computers
and Intractability: A Guide to the Theory of NP-
Completeness. W. H. Freeman.
Gillioz, A. and Riesen, K. (2022). Speeding up graph
matching by means of systematic graph reductions us-
ing centrality measures. In 2022 12th International
Conference on Pattern Recognition Systems (ICPRS),
pages 1–7. IEEE Computer Society.
Haxhimusa, Y. and Kropatsch, W. G. (2004). Segmentation
graph hierarchies. In Fred, A. L. N., Caelli, T., Duin,
R. P. W., Campilho, A. C., and de Ridder, D., editors,
Structural, Syntactic, and Statistical Pattern Recogni-
tion, Joint IAPR International Workshops, SSPR 2004
and SPR 2004, Lisbon, Portugal, August 18-20, 2004
Proceedings, volume 3138 of Lecture Notes in Com-
puter Science, pages 343–351. Springer.
Kashima, H., Tsuda, K., and Inokuchi, A. (2003). Marginal-
ized kernels between labeled graphs. In Fawcett, T.
and Mishra, N., editors, Machine Learning, Proceed-
ings of the Twentieth International Conference (ICML
2003), August 21-24, 2003, Washington, DC, USA,
pages 321–328. AAAI Press.
Kriege, N. M., Johansson, F. D., and Morris, C. (2020). A
survey on graph kernels. Appl. Netw. Sci., 5(1):6.
Liu, Y., Safavi, T., Dighe, A., and Koutra, D. (2018). Graph
summarization methods and applications: A survey.
ACM Comput. Surv., 51(3):62:1–62:34.
Morris, C., Kriege, N. M., Bause, F., Kersting, K., Mutzel,
P., and Neumann, M. (2020). Tudataset: A collec-
tion of benchmark datasets for learning with graphs.
CoRR, abs/2007.08663.
Newman, M. E. J. (2010). Networks: An Introduction. Ox-
ford University Press.
Pitas, I. (2016). Graph-Based Social Media Analysis. CRC
Press. Google-Books-ID: BvYYCwAAQBAJ.
Qiu, H. and Hancock, E. R. (2006). Graph matching and
clustering using spectral partitions. Pattern Recognit.,
39(1):22–34.
Riba, P., Fischer, A., Llad
´
os, J., and Forn
´
es, A. (2021).
Learning graph edit distance by graph neural net-
works. Pattern Recognit., 120:108132.
Riba, P., Llad
´
os, J., and Forn
´
es, A. (2020). Hierarchical
graphs for coarse-to-fine error tolerant matching. Pat-
tern Recognit. Lett., 134:116–124.
Riesen, K. and Bunke, H. (2008). IAM graph database
repository for graph based pattern recognition and ma-
chine learning. In da Vitoria Lobo, N., Kasparis, T.,
Roli, F., Kwok, J. T., Georgiopoulos, M., Anagnos-
topoulos, G. C., and Loog, M., editors, Structural,
Syntactic, and Statistical Pattern Recognition, Joint
IAPR International Workshop, SSPR & SPR 2008, Or-
lando, USA, December 4-6, 2008. Proceedings, vol-
ume 5342 of Lecture Notes in Computer Science,
pages 287–297. Springer.
Riesen, K. and Bunke, H. (2009). Approximate graph
edit distance computation by means of bipartite graph
matching. Image Vis. Comput., 27(7):950–959.
Riesen, K., Fischer, A., and Bunke, H. (2016). Approx-
imation of graph edit distance by means of a utility
matrix. In Schwenker, F., Abbas, H. M., Gayar, N. E.,
and Trentin, E., editors, Artificial Neural Networks in
Pattern Recognition - 7th IAPR TC3 Workshop, AN-
NPR 2016, Ulm, Germany, September 28-30, 2016,
Proceedings, volume 9896 of Lecture Notes in Com-
puter Science, pages 185–194. Springer.
Sanfeliu, A. and Fu, K. (1983). A distance measure be-
tween attributed relational graphs for pattern recogni-
tion. IEEE Trans. Syst. Man Cybern., 13(3):353–362.
Wu, Z., Pan, S., Chen, F., Long, G., Zhang, C., and Yu,
P. S. (2021). A comprehensive survey on graph neural
networks. IEEE Trans. Neural Networks Learn. Syst.,
32(1):4–24.
Two-Step Graph Classification on the Basis of Hierarchical Graphs
303
