Robust RGB-D-IMU Calibration Method Applied to GPS-Aided Pose
Estimation
Abanob Soliman
∗ a
, Fabien Bonardi
§ b
, D
´
esir
´
e Sidib
´
e
§ c
and Samia Bouchafa
§ d
Universit
´
e Paris-Saclay, Univ. Evry, IBISC Laboratory, 34 Rue du Pelvoux, Evry, 91020, Essonne, France
∗
fi fi
Keywords:
RGB-D Cameras, Calibration, RGB-D-IMU, Bundle-Adjustment, Optimization, GPS-Aided Localization.
Abstract:
The challenging problem of multi-modal sensor fusion for 3D pose estimation in robotics, known as odometry,
relies on the precise calibration of all sensor modalities within the system. Optimal values for time-invariant
intrinsic and extrinsic parameters are estimated using various methodologies, from deterministic filters to non-
deterministic optimization models. We propose a novel optimization-based method for intrinsic and extrinsic
calibration of an RGB-D-IMU visual-inertial setup with a GPS-aided optimizer bootstrapping algorithm. Our
front-end pipeline provides reliable initial estimates for the RGB camera intrinsics and trajectory based on
an optical flow Visual Odometry (VO) method. Besides calibrating all time-invariant properties, our back-
end optimizes the spatio-temporal parameters such as the target’s pose, 3D point cloud, and IMU biases.
Experimental results on real-world and realistically high-quality simulated sequences validate the proposed
first complete RGB-D-IMU setup calibration algorithm. Ablation studies on ground and aerial vehicles are
conducted to estimate each sensor’s contribution in the multi-modal (RGB-D-IMU-GPS) setup on the vehicle’s
pose estimation accuracy. GitHub repository: https://github.com/AbanobSoliman/HCALIB.
1 INTRODUCTION
A reliable autonomous vehicle odometry solution re-
lies on the continuous availability of the scene and
vehicle information, such as scene structure and the
vehicle’s physical properties (position, velocity, or ac-
celeration). These properties are measured by exte-
roceptive (Cameras/LiDAR/Radar/GPS) and propri-
oceptive (IMU/Wheel odometry) sensor modalities.
Hence, multi-modal odometry algorithms have at-
tracted the attention of many researchers in the last
few years (Hug et al., 2022; Chghaf et al., 2022;
Chang et al., 2022; Jung et al., 2022), especially in
challenging low structured environments.
Solutions incorporating a multi-camera system
with no IMUs can be much easier to bootstrap using
the 5-point (Nist
´
er, 2004) or the 8-point (Heyden and
Pollefeys, 2005) SfM algorithms with a robust out-
lier filtration method (Antonante et al., 2021; Barath
et al., 2020) without the need to estimate a global met-
ric scale for the trajectory.
Adding an IMU (or multiple IMUs as in (Rehder
a
https://orcid.org/0000-0003-4956-8580
b
https://orcid.org/0000-0002-3555-7306
c
https://orcid.org/0000-0002-5843-7139
d
https://orcid.org/0000-0002-2860-8128
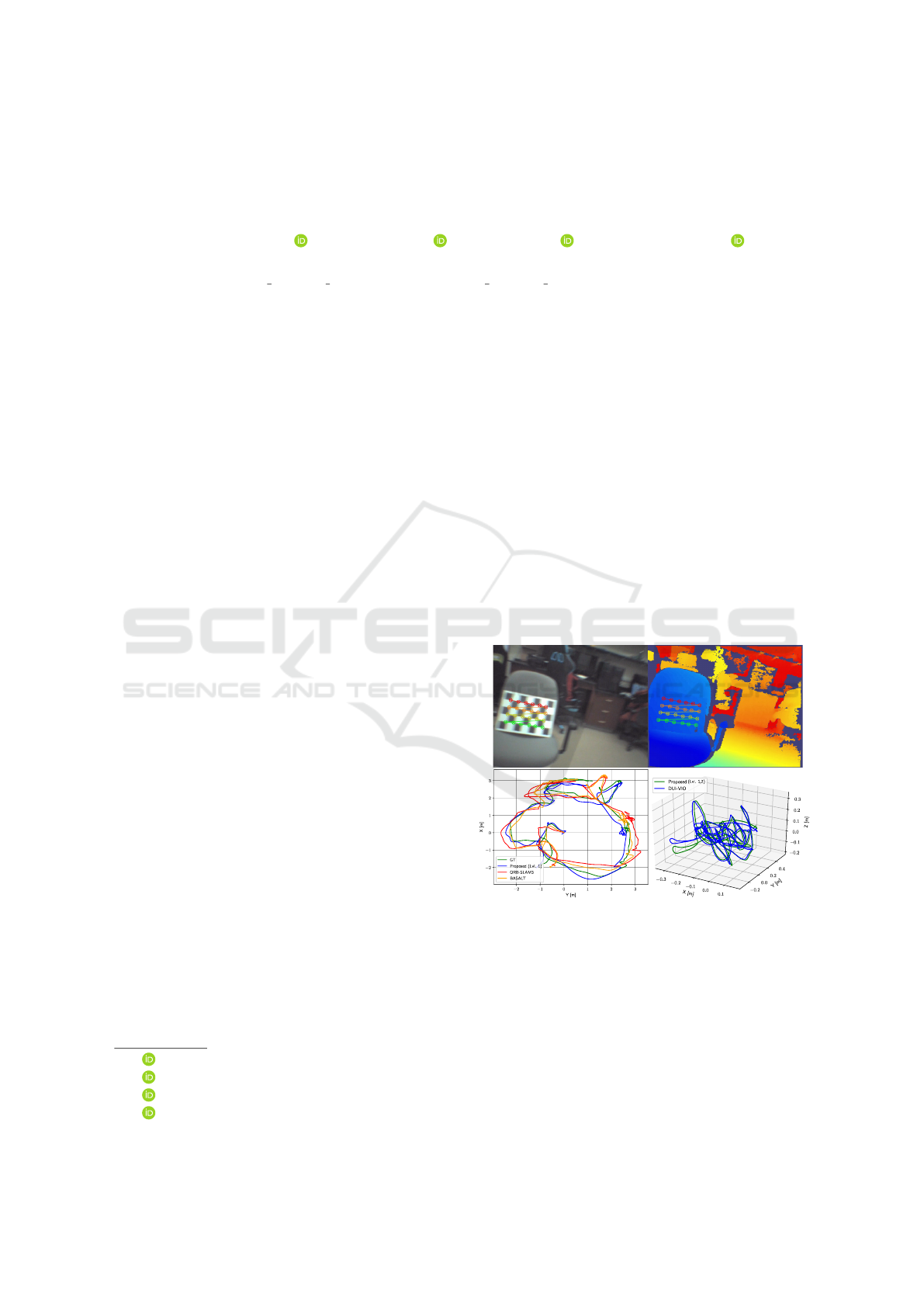
Figure 1: Our RGB-D-IMU setup calibration and pose es-
timation pipeline applied to the VCU-RVI hand-eye cali-
bration sequence (top/bottom-right) and the EuRoC V2-01
sequence (bottom-left).
et al., 2016)) to a multi-camera calibration framework
increases the complexity in the alignment process of
the target’s initial arbitrarily scaled poses with the ini-
tial real-world metric scaled ones (Qin et al., 2018).
In the recent work of (Das et al., 2021), they studied
a graph-based optimization approach that fuses GPS
and IMU readings with stereo-RGB cameras. They
show a superior estimation accuracy, especially in an
Soliman, A., Bonardi, F., Sidibé, D. and Bouchafa, S.
Robust RGB-D-IMU Calibration Method Applied to GPS-Aided Pose Estimation.
DOI: 10.5220/0011656800003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
83-94
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
83

offline operation, which is ideal for multi-modal cali-
bration applications.
A well-known IMU-based bootstrapping method
in the literature is described in (Qin et al., 2018),
where the global metric scale and the IMU gravity
direction are estimated using 4-DoF Pose Graph Op-
timization (PGO) augmented with the IMU preinte-
gration factors. We tackle this scaling problem with a
novel method that can be applied online, where low-
rate noisy GPS signals can be detected with a 6-DoF
PGO and a 3-DoF range factor. These instant initial-
ization factors solve the prominent initialization fail-
ure problem due to insufficient IMU excitation result-
ing in a reliable pose estimation algorithm (see Figure
1).
The visual-inertial bundle adjustment (BA) (Cam-
pos et al., 2021; Usenko et al., 2019) is a highly
non-linear process, primarily when there exists an
unconventional visual sensor (depth camera, for in-
stance) with a different spectral technology than that
of the RGB camera within the multi-modal calibration
framework. The accuracy and robustness of the cal-
ibration process are thoroughly dependent on the es-
timator initialization, which we perform using front-
end, and back-end (level 1) steps represented in the
pipeline in Figure 2. Towards a reliable RGB-D-IMU
calibration and GPS-aided poses estimation solution,
we sum up our main contributions as threefold:
• A novel method for bootstrapping the global met-
ric scale for a visual-inertial BA optimization
problem with a prior level of pose graph optimiza-
tion that relies on noisy low-rate GPS readings
combined with gyroscope measurements.
• A novel point cloud scale optimization factor that
integrates the untextured depth maps having no
distinctive features in a visual-inertial BA as any
conventional camera in a stereo-vision setup by a
double re-projection with distortion function.
• A robust multi-modal calibration algorithm for
RGB-D-IMU sensors setup with a reliable met-
ric scaled 3D pose estimation methodology eas-
ily extended to a multi-modal RGB-D-IMU-GPS
odometry algorithm.
2 RELATED WORK
Multi-modality has become the mainstream of most
recent calibration works (Xiao et al., 2022; Huai et al.,
2022; Zhang et al., 2022; Lee et al., 2022) because
an efficient multi-modal odometry solution depends
on an optimally calibrated system. In this work, we
propose a baseline robust method to calibrate RGB-
D-IMU full system parameters considering efficient
performance regarding latency, accuracy, and config-
uration robustness.
2.1 RGB-D-IMU Calibration
Over the recent years, RGB-D calibration algorithms
(Zhou et al., 2022; Basso et al., 2018; Darwish et al.,
2017b; Liu et al., 2020; Staranowicz et al., 2014) have
evolved to incorporate various depth correction strate-
gies based on an extra stage of an on-manifold opti-
mization. The works (Zhou et al., 2022; Basso et al.,
2018; Darwish et al., 2017b) correct depth with an ex-
ponential undistortion parametric curve fitting, while
others (Liu et al., 2020; Staranowicz et al., 2014) fit
the point cloud on a sphere. Adding an IMU sensor to
an RGB-D calibration setup is a configuration tack-
led in the works of (Chu and Yang, 2020) and (Guo
and Roumeliotis, 2013) using Extended Kalman Fil-
ters (EKFs). However, these RGB-D-IMU calibration
works mainly aim to estimate the pose and perform
IMU/CAM extrinsic calibration during the odometry
task.
2.2 RGB-D-IMU Odometry
Inspired by the pipeline of VINS-Mono (Qin et al.,
2018), we tackle the lack of insufficient IMU excita-
tion in the bootstrapping process by incorporating the
low-rate noisy GPS readings in a novel approach. The
RGB-D Visual-Inertial Odometry (VIO) works (Chu
and Yang, 2020; Chow et al., 2014; Ovr
´
en et al., 2013;
Chai et al., 2015; Guo and Roumeliotis, 2013), report
two ways to state estimation for an RGB-D camera-
based VIO. The first is to compute the pose change
using VO and fuse the estimated pose change with
the IMU’s preintegration (Brunetto et al., 2015; Laid-
low et al., 2017). Another way is to compute the vi-
sual features’ 3D locations using depth measurements
and an iterative approach to reduce the features’ re-
projection and the IMU’s preintegration factors (Shan
et al., 2019; Ling et al., 2018).
In the iterative optimization process, existing ap-
proaches utilizing either scheme assume a precise
depth measurement and consider the depth value of
a visual feature as a constant (Shan et al., 2019;
Ling et al., 2018). However, an RGB-D camera’s
depth measurement may have a high uncertainty level
(Zhang and Ye, 2020), resulting in considerable er-
ror values in the odometry state estimation if ignored.
The work in (Zuo et al., 2021) incorporates a learning-
based dense depth mapping method and performs a
filter-based approach for navigation state estimation.
Our work can be considered the first optimization-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
84
Level 1
Level 2
Checkerboard Corner
Detection
Checkerboard Corner
Detection
Initial Point Cloud
Reconstruction
RGB-D Frames
Alignement
Good Features
To Track
d
c
T
dc
dc
c
d
RGB-D-inertial
Bundle-Adjustment (BA)
Initialization Process (Bootstrapping)
State Estimation
Data Pre-processing
Range Factor
Pose Graph Optimization Factor
State
Initialization
Metric
Scaled
Pose
Arbitrary
Scaled
Pose
CT-GPS
Spline Fit
Cameras Intrinsics
IMU biases (b
a
,b )
Runge-Kutta 4
th
Order Integrator
RK4
RGB
Depth
Structured Re-projection Errors Factor
Cloud Scale Optimization Factor
IMU and Bias Factors
{
{
d
c,
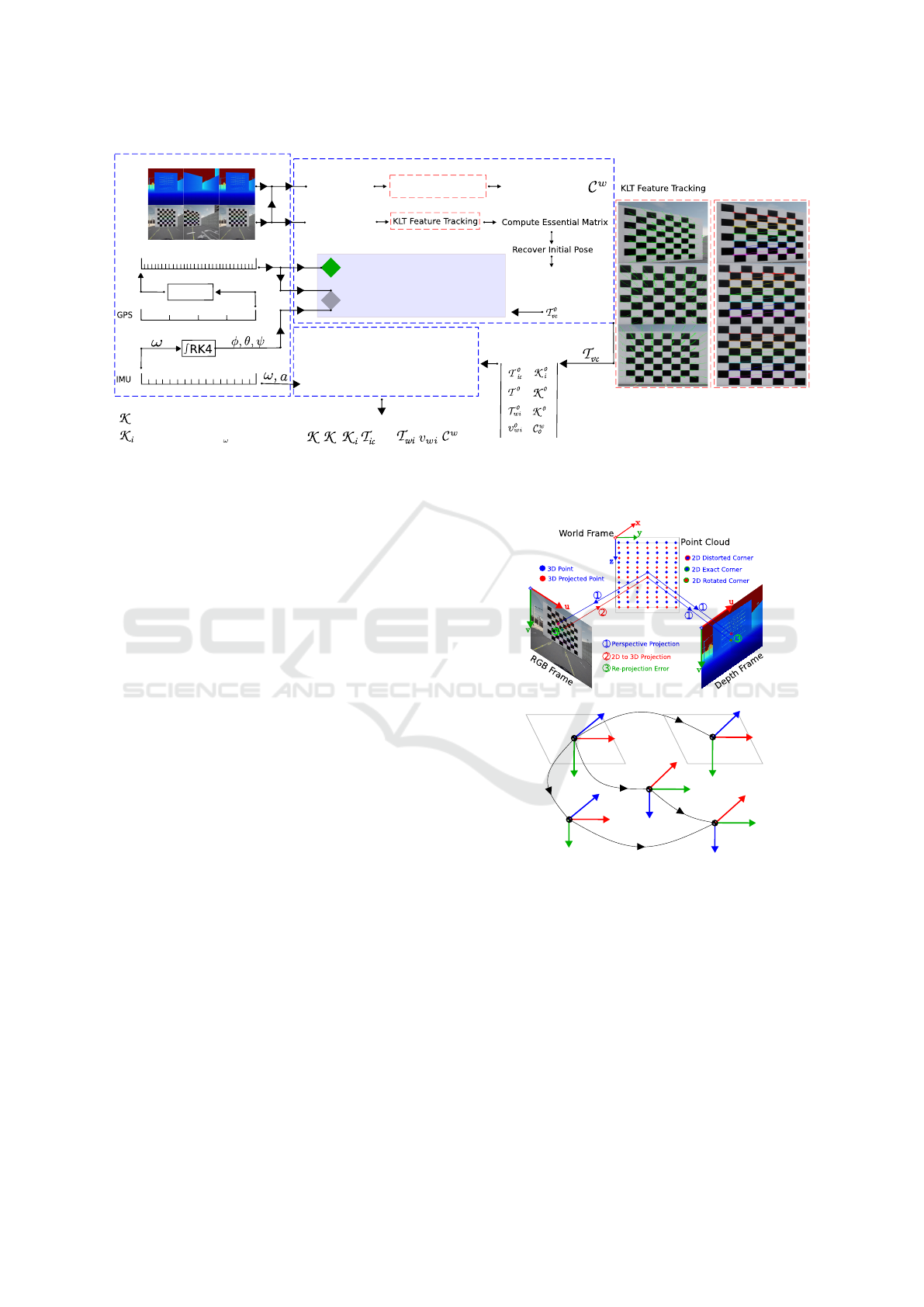
Figure 2: The pipeline of our method’s front-end and back-end. The front-end is an initial data processing layer after acquiring
RGB-D aligned frames. The back-end is the central processing layer of two optimization levels.
based RGB-D-IMU complete system calibration with
a novel depth correction model that does not require a
separate optimization stage to fit the depth map on a
high-order parametric curve or surface. The robust-
ness of our method conforms to the works (Surber
et al., 2017; Bloesch et al., 2015), which can be
summed up in three main points: minimum infor-
mation is needed to efficiently bootstrap the system,
overcome inertial and celestial sensors limitations
during the initialization process, and efficient mea-
surements outlier rejection (Antonante et al., 2021).
3 METHODOLOGY
This section presents a sequential overview of the pro-
posed calibration and pose estimation method. In
Section 3.1, we start by collecting the target’s poses
(up-to-scale) as well as the checkerboard corners and
construct an initial point cloud of the collected cor-
ners (see Figure 2 (top)). Then in Section 3.2, we
bootstrap the optimizer with GPS and gyroscope read-
ings for instant metric scale estimation of the esti-
mated target’s poses. Finally, Section 3.3 presents the
tightly-coupled hybridization factors to calibrate the
full RGB-D-IMU sensor setup in a non-linear BA op-
timization process.
3.1 Flow-Based Visual Odometry
Corners and their corresponding features from the
scene are first extracted via (Shi and Tomasi, 1994)
with a block size of 17 pixels. To enhance the ro-
bustness and the versatility of the VO process, we
(a)
(b)
World (W)
IMU (I)
RGB (C)
Depth (D)
x
x
x
x
y
y
y
y
z
z
z
z
T
ic
T
wi
T
dc
Visual (V)
x
y
z
T
vc
T
wv
Figure 3: Illustration for the re-projection error factors on
both RGB and Depth frames, as well as the coordinate
frames for all sensors undergoing optimization: (a) 3D to
2D and 2D to 3D to 2D re-projection error for triangulat-
ing the same target’s 3D corner on both the RGB-D current
aligned frames; (b) Coordinate frame of reference for all
sensors undergoing the calibration with respect to the world
frame. For consistency: all frames follow the right-handed
rule as OpenCV library.
adopt the optical flow-based feature tracking method:
Kanade–Lucas–Tomasi (KLT) (Tomasi and Kanade,
1991), to match corresponding features in a pyramidal
resolution approach of 7 levels with a 17 × 17 pixels
window size.
On tracking the most robust and stable features
Robust RGB-D-IMU Calibration Method Applied to GPS-Aided Pose Estimation
85

T
i
T
k
T
j
T
0
PGO Factor
Range Factor
GPS reading
Gyroscope reading
T
KLT-VO Pose
T
N
RK4RK4 RK4RK4
CT-GPS
p(u)
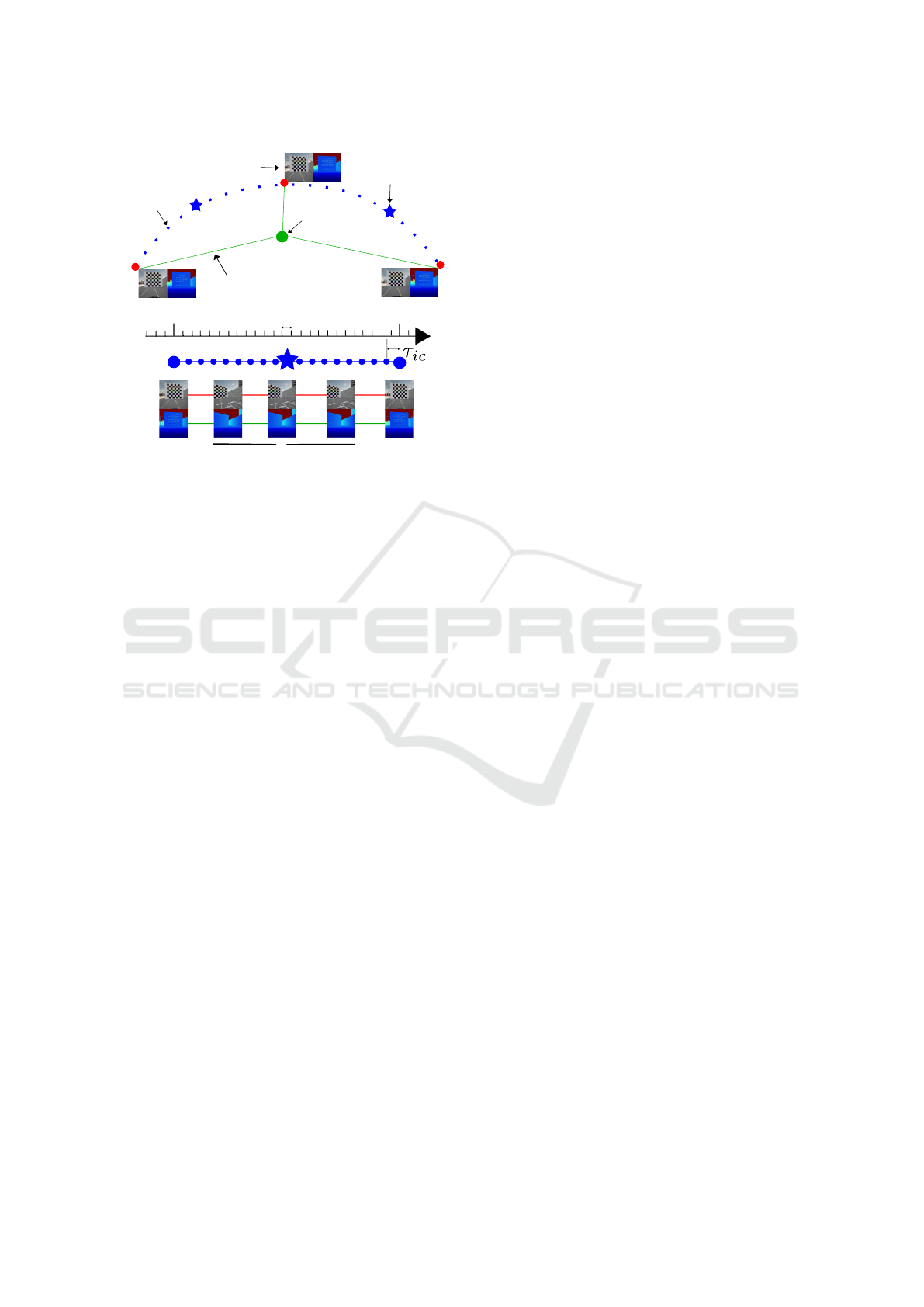
Figure 4: Level 1 factor graph. p(u) is the CT-GPS trajec-
tory generated at high frequency. RK4 is the Runge-Kutta
4
th
order gyroscope integration scheme. Dotted lines de-
note the error term (
ˆ
T
−1
i
ˆ
T
j
) in Equation (5) between any
two KLT-VO poses.
in 10 consecutive frames, we apply the 5-point algo-
rithm (Nist
´
er, 2004) to calculate the Essential Matrix
with feature outlier rejection by MAGSAC++ (Barath
et al., 2020), a more robust implementation of the
RANSAC method. Then the relative transformation
between every 2 consecutive frames T
vc
∈ SE(3) is
recovered from the Essential Matrix, which we use to
initialize our level 1 optimization process with the ini-
tial pose graph using the following arbitrarily scaled
transformation:
T
wc
˙= T
wv
. T
vc
, (1)
where T
wv
∈ SE(3) is the rigid-body transforma-
tion between the IMU/body (world) and RGB camera
(visual) inertial frames of reference w, v, respectively.
In initialization, we assume that there is no transla-
tion between the IMU-camera reference frames, i.e.,
t
wv
= [0, 0,0]
⊤
, and the rotation R
wv
between them is
given in Figure 3 (b), knowing that the camera frame
c and its inertial frame of reference (visual frame v)
initially coincides on each other. Until this step, the
RGB camera’s rigid-body motion T
wc
is considered
the arbitrary scaled rigid-body motion of all the multi-
modal sensor setup T
0
wi
.
In parallel, a checkerboard corner detection is run
on all RGB camera frames. When a checkerboard is
detected, an RGB frame is considered a calibration
keyframe (KF). We integrate the corresponding time-
synchronized, and spatially aligned (Darwish et al.,
2017a) depth frame (d) to construct a 3D point cloud
of the currently detected corners.
3.2 Optimizer Robust Initialization
After obtaining the target’s poses and initially con-
structing point clouds of the checkerboard, bootstrap-
ping the optimizer is essential for a reliable calibra-
tion process. This method is efficient in terms of com-
plexity since the bootstrapping relies only on low-
rate noisy GPS measurements and gyroscope prein-
tegrated readings. To tackle these GPS problems,
we apply an on-manifold cumulative B-spline inter-
polation (Sommer et al., 2020) to synthesize a very
smooth continuous-time (CT) trajectory ∈ R
3
from
the low-rate noisy GPS readings, as illustrated in Fig-
ure 4.
The matrix form for the cumulative B-spline man-
ifold of order k = n + 1, where n is the spline degree,
is modeled at t ∈ [t
i
,t
i+k−1
] as:
p(u) = p
i
+
k−1
∑
j=1
e
B
(k)
j
. ¯u
(k)
j
.d
i
j
∈ R
3
, (2)
where p(u) is the continuous-time B-spline increment
that interpolates k GPS measurements on the nor-
malized unit of time u(t) := (t − t
i
)/∆t
s
− P
n
where
1/∆t
s
denotes the spline generation frequency, P
n
is
the pose number that contributes to the current spline
segment P
n
∈ [0,··· ,k − 1]. p
i
is the initial discrete-
time (DT) GPS location measurement at time t
i
. d
i
j
=
p
i+ j
− p
i+ j−1
is the difference vector between two
consecutive DT-GPS readings.
e
B
(k)
j
is the cumulative
basis blending matrix and ¯u
(k)
j
is the normalized time
vector and are defined as:
e
B
(k)
j
=
e
b
(k)
j,n
=
∑
k−1
s= j
b
(k)
s,n
,
b
(k)
s,n
=
C
n
k−1
(k−1)!
∑
k−1
l=s
(−1)
l−s
C
l−s
k
(k − 1 − l)
k−1−n
,
¯u
(k)
j
= [u
0
,·· · , u
k−1
, u
k
]
⊤
, u ∈ [0,· ·· , 1].
(3)
Our GPS-IMU-aided initialization system com-
prises two factors; the first factor, r
p
, optimizes the 6-
DoF of every pose, whereas the second factor, r
s
, op-
timizes the positional 3-DoF between two poses with
a range constraint.
The level 1’s objective function L
p,s
is modeled as:
L
p,s
= argmin
T
wi
h
N
∑
(i, j)
||r
p
(i, j)||
2
Σ
p
i, j
+ ||r
s
(i, j)||
2
Σ
s
i, j
i
.
(4)
Σ
p
i, j
,Σ
s
i, j
are the information matrices associated
with the GPS readings covariance, reflecting the
PGO and Range factors noises on the global metric
scale estimation process between two RGB-D aligned
frames.
Pose Graph Optimization (PGO) Factor. The PGO
is a 6-DoF factor that controls the relative pose error
between two consecutive edges i, j and is formulated
as:
r
p
=
ˆ
T
−1
i
ˆ
T
j
⊖ ∆T
ω,GPS
i j
2
, (5)
where ||.||
2
is the L2 norm,
ˆ
T
i, j
∈ SE(3) is the T
0
wi
estimated from the front-end pipeline at frames i, j.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
86
RGB:
Depth:
IMU:
i
j
k
Δt
3D Point Cloud
Re-projection & Scale Factors
IMU Factors
IMU Measurements
{
{
KF
KF
NOT KF (No checkerboard detected)
keyframe
{
{
{
Figure 5: Level 2 factor graph between RGB-D aligned
keyframes (KF). This factor graph illustrates the non-linear
BA process to calibrate the full RGB-D-IMU sensor setup.
∆t denotes the IMU time step. τ
ic
denotes the camera-IMU
time offset.
⊖ is the SE(3) logarithmic map as defined in (Wang
and Chirikjian, 2008). ∆T
ω,GPS
i j
[δR
ω
i j
,δp
GPS
i j
] ∈ se(3),
where δp
GPS
i j
= p
j
− p
i
is the CT-GPS measurement
increment and δR
ω
i j
= [δφ,δθ, δψ] is the gyroscope in-
tegrated increment δR
ω
i j
=
R
j
k=i
(ω
k
).dk using Runge-
Kutta 4
th
order (RK4) integration method (Zheng and
Zhang, 2017) between the two keyframes i, j.
Range Factor. The range factor limits the front-end
visual drift and keeps the global metric scale under
control within a sensible range defined by the GPS
signal and is formulated as:
r
s
=
||
ˆ
t
j
−
ˆ
t
i
||
2
− ||p
GPS
j
− p
GPS
i
||
2
2
, (6)
where inner ||.||
2
is the Euclidean norm between the
translation vectors
ˆ
t
i, j
, p
GPS
i, j
∈ R
3
of two consecutive
front-end (KLT-VO) poses and CT-GPS signals, re-
spectively.
3.3 RGB-D-IMU Local Bundle
Adjustment
To estimate the calibration parameters of the RGB-
D-IMU, we fuse the tracked checkerboard corners
and point clouds with the IMU preintegrated mea-
surements factor proposed in (Forster et al., 2016).
Figure 5 shows our sliding window approach. The
local BA is performed on all collected 2D corners
B within their corresponding 3D point cloud C be-
tween two aligned RGB camera c and Depth camera
d keyframes i, j, and the IMU readings I in-between.
Our local bundle-adjustment minimization objective
function L
c,d,I
is defined by:
L
c,d,I
= argmin
X
h
N
∑
(i, j)
ρ
H
(||r
I
(i, j)||
2
Σ
I
i, j
)
+
N
∑
C
i
M
∑
B
i
ρ
H
(||r
c
(B
i
|C
i
)||
2
Σ
c
i
) + ρ
C
(||r
d
(B
i
|C
i
)||
2
Σ
d
i
)
i
,
(7)
with X , the full local BA optimization states, which
is defined as:
X =
{
K
c
,K
d
,K
i
,T
ic
,T
dc
,T
wi
,v
wi
,C
w
}
,
K
c
,K
d
= [ f
x
, f
y
, c
x
, c
y
, k
1
, k
2
, p
1
, p
2
, k
3
, λ] ∈ R
10
,
K
i
k
= [τ
ic
, b
ω
, b
a
] ∈ R
7
, ∀k ∈ [0, N],
T
ic
,T
dc
,T
wi
= [R
ic
|t
ic
, R
dc
|t
dc
, R
wi
|t
wi
] ∈ SE(3),
C
w
k
= [X
w
, Y
w
, Z
w
] ∈ R
3
, ∀k ∈ [0, N],
(8)
where K
c
,K
d
are intrinsic parameters containing the
cameras focal lengths f
x
, f
y
, focal centers c
x
, c
y
,
radial-tangential distortion coefficients k
1,2,3
, p
1,2
,
and the cloud scale factor λ. T
ic
,T
dc
are the inter-
sensor extrinsic rigid-body transformations. While
the spatio-temporal parameters include the scene
structure C
w
, the body metric scaled pose T
wi
, veloc-
ity v
wi
with respect to the world coordinates, τ
ic
[sec]
is the IMU-camera time-offset (Voges and Wagner,
2018), and b
ω
∈ R
3
, b
a
∈ R
3
are the gyroscope and
accelerometer biases, respectively. N,M are the
number of calibration keyframes and corner obser-
vations, respectively. r
I
,r
c
,r
d
are the IMU, corner
re-projection, and cloud-scale factors, respectively.
Σ
I
i, j
,Σ
c
i
,Σ
d
i
are the information matrices associated
with the IMU readings I , detected corners B, and re-
constructed cloud C scale noise covariance. ρ is the
loss function defined by Huber norm (Huber, 1992)
ρ
H
for r
I
,r
c
and Cauchy norm (Black and Anandan,
1996) ρ
C
for r
d
.
Structured Re-Projection Errors Factor. We apply
the RGB camera pinhole model with radial-tangential
distortion coefficients with intrinsic parameters ma-
trix K
c
. As illustrated in Figure 3 (a), we consider a
constructed 3D point cloud C
w
k
using the depth cam-
era aligned k
th
frame with the current RGB keyframe
k. For every checkerboard, we have H ×W feature ob-
servations, representing the keyframe’s detected cor-
ners B
c
k
[u,v].
There is a factor for every detected corner on the
current keyframe k that minimizes the error between
this corner’s location B
c
k
[u,v] and the re-projection of
the cloud’s C
w
k
(u,v) corresponding 3D point on k
th
Robust RGB-D-IMU Calibration Method Applied to GPS-Aided Pose Estimation
87

Figure 6: Illustration for the 2D-3D-2D projection of the
H ×W = 7 × 7 checkerboard feature points from the RGB
frame to the point cloud and then to the depth frame. λ is
the correction factor for RGB camera intrinsics to estimate
the cloud scale factor optimally.
keyframe after distortion
ˆ
B
c
k
[ ˆu, ˆv]. This factor is de-
fined by:
r
c
= ||B
c
k
[u,v] −
ˆ
B
c
k
[ ˆu, ˆv]||
2
. (9)
Applying the pinhole camera radial-tangential dis-
tortion model (Zhang, 2000) to calculate the distorted
pixel location of the re-projected 3D point on the cur-
rent frame
ˆ
B
c
k
[ ˆu, ˆv], we get:
C
c
k
(u,v) = T
ic
−1
.T
wi
−1
.C
w
k
(u,v) = [X
c
k
,Y
c
k
,Z
c
k
],
¯u = X
c
k
/Z
c
k
+ c
x
/ f
x
, ¯v = Y
c
k
/Z
c
k
+ c
y
/ f
y
,
r
2
= ¯u
2
+ ¯v
2
,
ˆu = f
x
.( ¯u.(1 + k
1
.r
2
+ k
2
.r
4
+ k
3
.r
6
+2.p
1
. ¯v)+ p
2
.(r
2
+ 2. ¯u
2
)),
ˆv = f
y
.( ¯v.(1 + k
1
.r
2
+ k
2
.r
4
+ k
3
.r
6
+2.p
2
. ¯u) + p
1
.(r
2
+ 2. ¯v
2
)).
(10)
Cloud Scale Optimization Factor. This factor is
modeled to fuse the corner features from RGB frames
with the untextured depth maps to benefit from the
advantages of both sensors by minimizing the error
between the distorted re-projection of the 3D cloud
point C
w
k
(u,v) on the k
th
depth frame
ˆ
B
d
k
[ ˆu, ˆv] and the
current corner feature observation g
d
(B
c
k
[u,v]) with
respect to it.
The effectiveness of this factor comes from the
hypothesis that undistorting the depth frame will, in
return, undistort the planar coordinates of the point
cloud C
d
k
[X
d
k
,Y
d
k
]. In Figure 6, we apply the scale of
the cloud λ (known as inverse depth) to optimize the
RGB camera focal lengths with the cloud’s 3
rd
coor-
dinate C
d
k
[Z
d
k
] which is optimized within the joint cal-
ibration model, knowing the metric scale of the pose.
This factor is defined by:
r
d
= ||g
d
(B
c
k
[u,v]) −
ˆ
B
d
k
[ ˆu, ˆv]||
2
, (11)
where
ˆ
B
d
k
[ ˆu, ˆv] follows the same model in Equa-
tion (10) by replacing C
c
k
(u,v) with C
d
k
(u,v) =
T
dc
.C
c
k
(u,v). g
d
(.) is a double re-projection with dis-
tortion function, that firstly projects the observation
B
c
k
[u,v] to the 3D point cloud C
c
k
(B
c
k
[u,v]) as illus-
trated by red arrow numbered (2) in Figure 3 (a) using
the rigid-body transformation T
wc
= T
wi
.T
ic
from c to
w coordinates with the following formula:
C
c
k
(B
c
k
[u,v]) = R
wc
.(λ.K
−1
c
.B
c
k
[u,v]) + t
wc
. (12)
Then secondly, rotates C
c
k
(B
c
k
[u,v]) to
C
d
k
(B
c
k
[u,v]) using T
dc
, and finally, re-projects
and undistorts this double rotated point on the depth
frame C
d
k
(B
c
k
[u,v]) using the same model in Equation
(10).
IMU Factors. The IMU preintegration factors be-
tween two consecutive keyframes i, j is defined in
(Forster et al., 2016) by:
r
I
= [∆R
i, j
,∆v
i, j
,∆p
i, j
,∆b
ω,a
i, j
] ∈ R
15
,
r
I
∆R
i, j
= log((∆
˜
R
i, j
)
⊤
.R
⊤
i
.R
j
),
r
I
∆v
i, j
= R
⊤
i
.(v
j
− v
i
− g∆t
i, j
) − ∆ ˜v
i, j
,
r
I
∆p
i, j
= R
⊤
i
.(t
j
−t
i
− v
i
∆t
i, j
−
1
2
g∆t
2
i, j
) − ∆ ˜p
i, j
,
r
I
∆b
i, j
= ||b
ω
j
− b
ω
i
||
2
+ ||b
a
j
− b
a
i
||
2
.
(13)
where ∆
˜
R
i, j
,∆ ˜v
i, j
,∆ ˜p
i, j
are the preintegrated rota-
tion, velocity and translation increments. All these
on-manifold preintegration increments derivations, as
well as the covariance Σ
I
i, j
propagation, are given in
the supplementary material of (Forster et al., 2016),
and for better readability, we write R
i, j
,t
i, j
,v
i, j
instead
of [R
wi
,t
wi
,v
wi
].
4 EXPERIMENTS
We evaluate the performance of our method (see
Algorithm 1) on two applications: RGB-D-IMU
Calibration and GPS-aided pose estimation. Using
the IBISCape (Soliman et al., 2022) benchmark’s
CARLA-based data acquisition APIs, we collect three
simulated calibration sequences with a vast range of
sizes. Moreover, algorithm validation on simulated
sequences eases the change of settings to various sen-
sor configurations for robust validation of all corner
cases and provides a baseline for most system pa-
rameters. Furthermore, for real-world assessment, we
evaluate our calibration method on the RGB-D-IMU
checkerboard hand-eye calibration sequence from the
VCU-RVI benchmark (Zhang et al., 2020). Finally,
we conduct ablation studies on both IBISCape (Vehi-
cle) and EuRoC (Burri et al., 2016) (MAV) sequences
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
88

Algorithm 1: End-to-End Optimization Scheme.
Input: RGB frames (c), RGB-aligned depth
maps (d), GPS readings (DT-GPS), IMU readings (I )
Output: X =
{
K
c
,K
d
,K
i
,T
ic
,T
dc
,T
wi
,v
wi
,C
w
}
1: T
vc
⇐ KLT-VO (c, K
0
c
) ▷ Arbitrary scaled
2: T
0
wi
⇐ rotate (T
wc
∗ [T
0
ic
]
−1
) ▷ Eq. (1)
3: B
c
k
[u,v] ⇐ collect corners (c, H, W) ▷ pix-2D
4: C
w
0
⇐ construct (d, B
c
k
[u,v], K
0
d
) ▷ Initial pcl-3D
5: p(u) ⇐ spline fit (DT-GPS) ▷ Eq. (2)
6: [φ, θ,ψ] ⇐ RK4 (I
gyro
(ω)) ▷ Initial orientations
7: while not converged do ▷ Start Level 1
8: T
wi
⇐ optimize (T
0
wi
, p(u), [φ, θ,ψ]) ▷ Eq. (4)
9: end while
10: while not converged do ▷ Start Level 2
11: X ⇐ optimize (I , X
0
(T
wi
, C
w
0
)) ▷ Eq. (7)
12: end while
Table 1: Optimization process complexity analysis on IBIS-
Cape benchmark S1,S2,S3 sequences.
Level Initial Cost Final Cost Residuals Iterations Time
1.PGO
S1 1.69e+4 3.19e-9 2464 22 2.81”
S2 9.62e+4 3.12e-8 6951 26 8.79”
S3 1.47e+5 2.31e-8 14875 22 16.08”
Average 8097 23 9.23”
2.BA
S1 6.02e+7 1.57e+5 74820 274 2’40.56”
S2 3.67e+8 7.09e+5 210500 758 22’10.23”
S3 7.53e+8 1.22e+6 450696 779 49’22.04”
Average 245339 604 24’44.28”
to assess the contribution of each sensor in an RGB-
D-IMU-GPS setup to the accuracy of the pose estima-
tion for a reliable long-term navigation.
Factor graph optimization problems in Equations
(4) and (7) are modeled and solved using a sparse di-
rect method by the Ceres solver (Agarwal et al., 2022)
with the automatic differentiation tool for Jacobian
calculations. The sparse Schur linear method is ap-
plied to use the Schur complement for a more robust
and fast optimization process. Maximum calibration
time for the largest sequence S3 is ≈ 50[min] on a 16
cores 2.9 GHz processor and a Radeon NV166 RTX
graphics card. The front-end pipeline is developed in
Python for better visualization, and the back-end cost
functions are developed in C++ to decrease the sys-
tem latency during the optimization process.
A more in-depth quantitative analysis of the opti-
mization process computational cost is given in Table
1, where all experiments converged successfully. The
prominent conclusion from this complexity analysis
is that the level 2 BA optimization process is compu-
tationally highly expensive compared to the target’s
pose estimation optimization process of level 1. How-
ever, this level 2’s high computational load can still
compete with other calibration tools’ BA optimiza-
tion time, such as Kalibr (Rehder et al., 2016).
S1
VCU-RVI (hand-eye)
Figure 7: The target’s top-view 3D point cloud recon-
struction; (left) VCU-RVI initially constructed point clouds,
(right) CARLA optimized point cloud. Blue dots with a red
outline denote the checkerboard corners 3D location. The
green colored curve represents the point cloud’s normal dis-
tribution convergence after optimization. Green circles de-
note a point cloud depth mean value.
4.1 Application I: RGB-D-IMU
Calibration
For both VCU-RVI and CARLA sequences, initial
values for the cameras’ intrinsic matrices are set to
W /2 for c
x
, f
x
, H/2 for c
y
, f
y
, and zeros for the radial-
tangential distortions. Initial λ is set with 0.1643,
which is the pixel density of CARLA cameras. For
extrinsic parameters T
0
ic
and T
0
dc
initialization, we set
the translation part with zeros, and the rotation matrix
is set as given in Figure 3 (b). Since the VCU-RVI
handheld sequence can provide sufficient IMU exci-
tation but with no GPS data available, bootstrapping
the calibration system is performed by the traditional
IMU-based method (Qin et al., 2018).
We validate our new cloud global optimization
factor based on two criteria: the estimated point cloud
after optimization and the depth frame distortion esti-
mation as an indicator for depth correction. Figure 7
shows that the optimized cloud is converging to a nor-
mal distribution whose mean is the exact location in
the simulation world at 60 m which is at the checker-
board’s location as marked on Figure 8. Table 2 shows
the considerably high values for depth frame distor-
tion coefficients, indicating our factor’s effect on the
cloud’s planar undistortion.
Using Kalibr (Rehder et al., 2016) as a baseline
for the RGB camera intrinsics for both CARLA and
VCU-RVI sequences, we evaluate our optimizer es-
timation quality in Table 2. Since the map scale λ
is an RGB camera optimization parameter based on
the RGB-D geometric linking constraint introduced in
Equation (12), the estimates of the focal length need
scale correction using: f
corr
x,y
= f
est
x,y
∗ λ. For the VCU-
RVI hand-eye sequence, we notice that the cloud scale
factor is approaching the value 1, which indicates
that the initial point cloud is constructed with a high-
Robust RGB-D-IMU Calibration Method Applied to GPS-Aided Pose Estimation
89
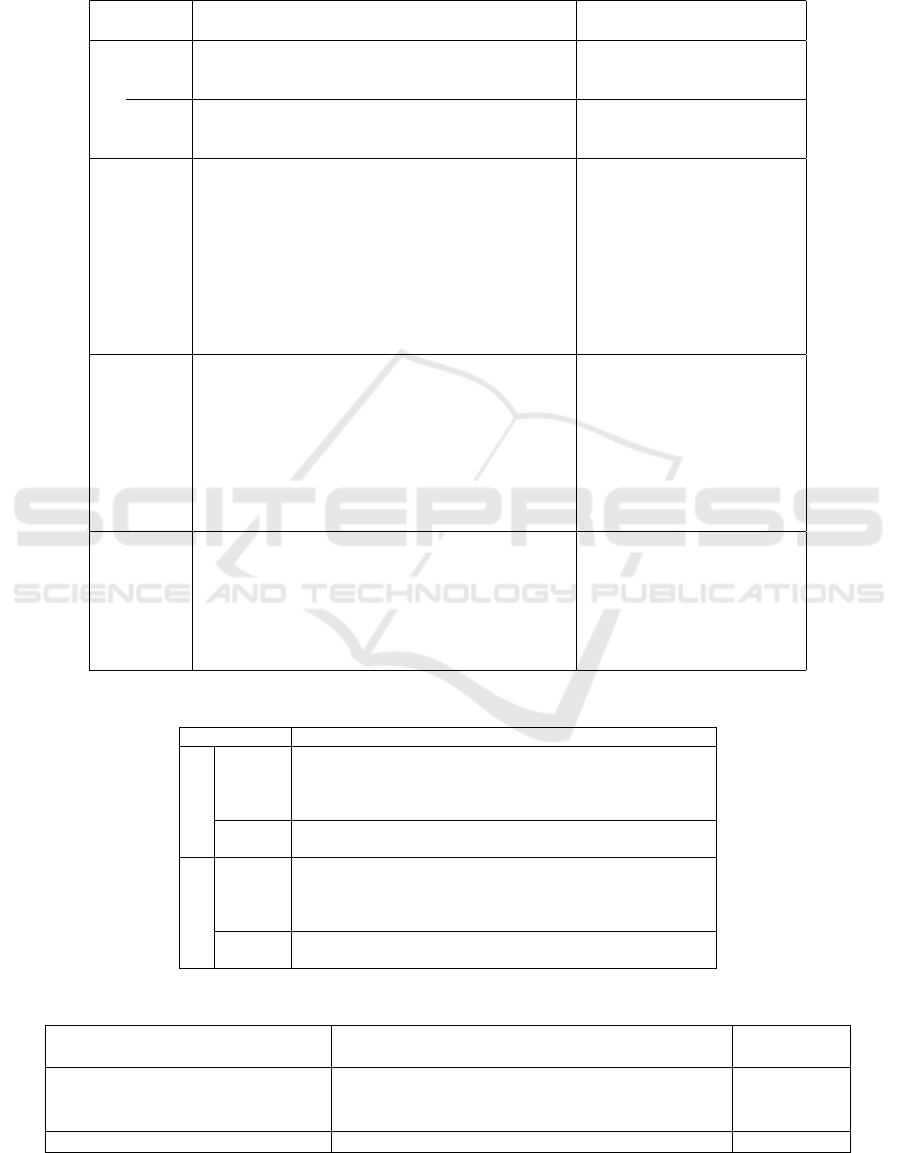
Table 2: RGB-D-IMU Sensors Setup Intrinsic Parameters Estimation. Since the CARLA simulator does not provide exact
intrinsics values, GT for RGB camera intrinsics are obtained with Kalibr (Rehder et al., 2016). KF: keyframes count. TL:
Sequence Trajectory Length. D: Sequence Duration.
∗
denotes a value calculated from the Structure Core (SC) RGB-D
camera specifications with depth FOV=70°.
∗∗
denotes a value from the Bosch BMI085 IMU technical data sheet.
Parameter
CARLA Simulator (IBISCape (Soliman et al., 2022)) VCU-RVI (Zhang et al., 2020)
S1 S2 S3 GT hand-eye GT
Specifications
RGB 20 Hz - 1024×1024 px 30 Hz - 640×480 px
Depth 20 Hz - 1024×1024 px 30 Hz - 640×480 px
IMU 6-axis acc/gyro @200Hz 6-axis acc/gyro @100Hz
#KF 353 994 2126 - 1118 -
TL[m] 122.06 345.42 737.88 - 11.16 -
D[sec] 17.640 49.730 106.29 - 46.59 -
RGB Camera
λ. f
x
164.01 122.71 148.42 151.51 375.67 459.36
λ. f
y
163.30 122.22 149.39 151.89 398.44 459.76
c
x
498.89 506.21 507.59 510.01 315.48 332.69
c
y
514.01 515.49 518.61 510.71 289.64 258.99
k
1
-5.10e-3 -6.20e-3 -6.15e-3 2.42e-5 -1.62e-2 -2.98e-1
k
2
-1.95e-3 -1.96e-3 -2.07e-3 2.89e-6 -3.62e-3 9.22e-2
p
1
-1.25e-3 -1.96e-3 -8.31e-4 1.71e-4 -2.31e-3 -1.19e-4
p
2
-3.20e-3 -2.27e-3 -3.53e-3 -3.22e-5 -1.09e-2 -7.46e-5
k
3
-8.16e-4 -8.70e-4 -8.64e-4 0.0 -7.84e-4 -
λ 0.3581 0.2819 0.3432 - 0.9831 -
Depth Camera
f
x
511.42 511.51 511.51 512.0 456.82 457.01
∗
f
y
511.91 511.83 511.82 512.0 456.06 457.01
∗
c
x
512.20 512.22 512.30 512.0 333.29 320.0
∗
c
y
511.81 512.01 512.02 512.0 259.17 240.0
∗
k
1
-3.53e-2 -3.37e-2 -3.54e-2 - -5.74e-2 -
k
2
-5.60e-3 -6.20e-3 -6.25e-3 - -9.07e-3 -
p
1
-3.41e-2 -3.22e-2 -3.29e-2 - -4.13e-2 -
p
2
-3.93e-2 -3.50e-2 -3.82e-2 - -6.09e-2 -
k
3
-1.10e-3 -1.45e-3 -1.38e-3 - -2.98e-4 -
IMU Sensor
τ
ic
4.986e-3 4.989e-3 4.998e-3 5e-3 4.473e-3 -
b
ω
x
-7.549e-3 -2.242e-2 -4.907e-3 -2.383e-3 1.512e-4 9.69e-5
∗∗
b
ω
y
-3.283e-2 3.813e-2 -2.054e-2 -3.364e-3 9.337e-5 9.69e-5
∗∗
b
ω
z
8.151e-2 2.659e-2 -2.540e-2 1.555e-3 -2.967e-4 9.69e-5
∗∗
b
a
x
0.109 -0.062 0.147 -0.951 -5.704e-4 -
b
a
y
-0.707 -1.069 -0.091 -0.691 6.757e-4 -
b
a
z
-1.926 -2.295 -2.364 0.183 -9.304e-4 -
Table 3: Extrinsic parameters estimation for both IBISCape (S1,S2,S3) and VCU-RVI (hand-eye) calibration sequences.
Parameter t
x
[m] t
y
[m] t
z
[m] q
x
q
y
q
z
q
w
RGB-D (T
dc
)
S1 4.95e-3 0.017 0.037 -0.037 -0.022 0.030 0.997
S2 5.47e-3 0.020 0.065 -0.041 0.005 0.019 0.996
S3 9.10e-3 0.018 0.065 -0.036 -0.010 0.025 0.997
GT 0.0 0.020 0.060 0.0 0.0 0.0 1.0
hand-eye -0.103 0.003 0.018 0.041 0.081 0.009 0.969
GT -0.100 0.0 0.0 0.0 0.0 0.0 1.0
RGB-IMU (T
ic
)
S1 -0.806 0.154 -0.308 0.493 0.507 0.499 0.500
S2 -0.854 -0.057 0.006 0.503 0.495 0.501 0.498
S3 -0.808 -0.028 -0.102 0.503 0.501 0.499 0.496
GT -0.800 0.0 0.0 0.500 0.500 0.500 0.500
hand-eye 0.077 0.020 -0.041 0.699 -0.713 -0.009 -9e-4
GT -0.008 0.015 -0.011 0.708 -0.706 0.001 -4e-4
Table 4: Ablation study on the contribution of the GPS sensor on the system accuracy when depth information is available.
Method
IBISCape (Soliman et al., 2022) (RPE
p
(µ ± σ) [m])
Average
S1 S2 S3
DUI-VIO (Zhang and Ye, 2020) 0.115±0.113 0.115±0.114 0.120±0.119 0.117±0.115
BASALT (Usenko et al., 2019) 0.084±0.084 0.052±0.051 0.026±0.026 0.054±0.054
ORB-SLAM3 (Campos et al., 2021) 0.028±0.013 0.073±0.034 0.031±0.028 0.044±0.025
Proposed (Lvl.1+2) 0.016±0.019 0.025±0.030 0.018±0.025 0.020±0.025
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
90
1
2
3
3
2
1
Proposed (Lvl.1+2)
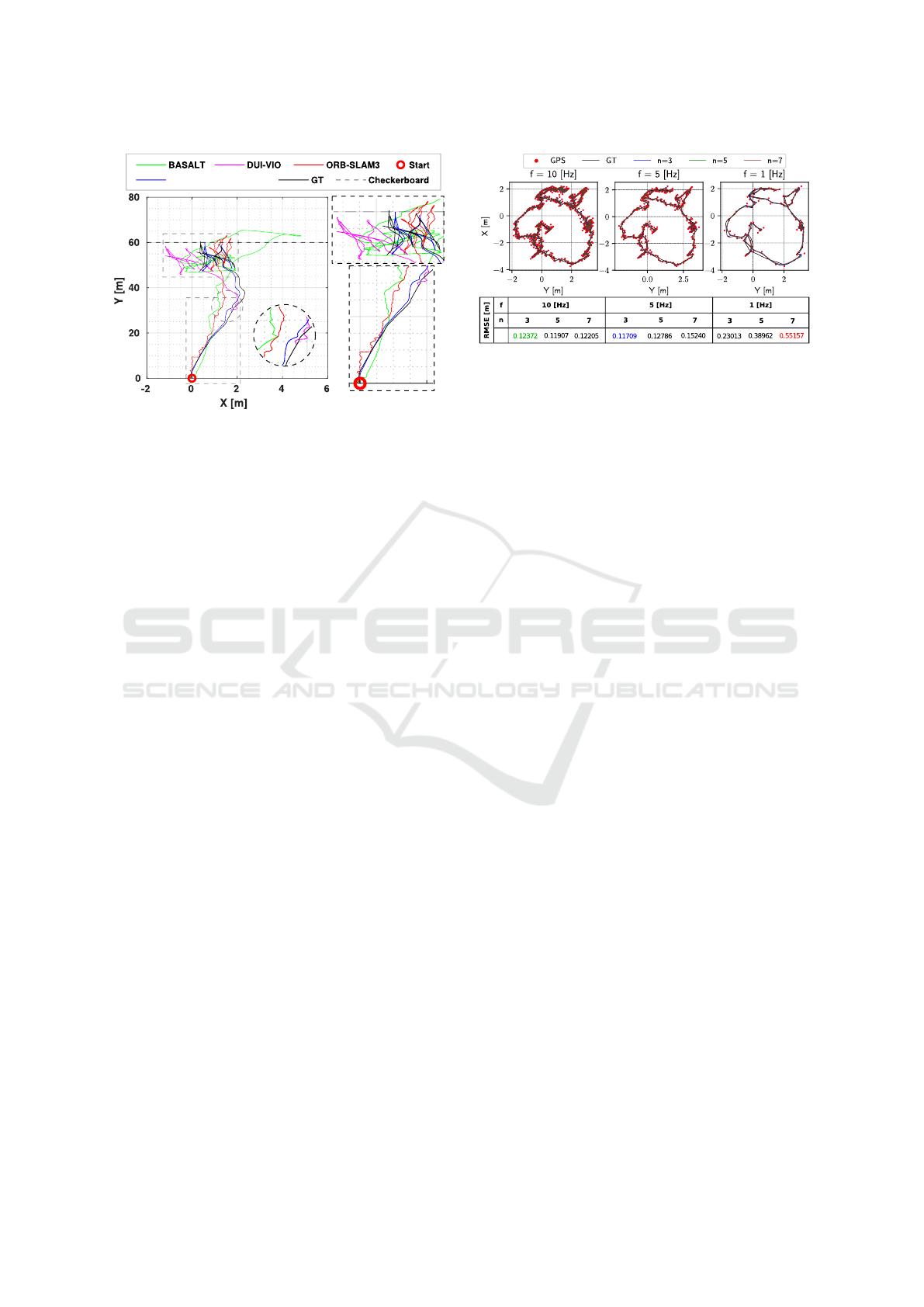
Figure 8: Pose estimation evaluation of our method com-
pared to ORB-SLAM3, BASALT, and DUI-VIO on S1 se-
quence. Different axes scale for showing fine details.
quality depth sensor.
In Table 3, we show the optimal performance of
our optimizer to estimate the inter-sensor extrinsic pa-
rameters compared to the GT values. Compared to the
baseline, our optimizer efficiently estimates the inter-
sensor rotation and translation in the case of RGB-
D sensors. For the IMU-camera extrinsic parameters
and in contrast to rotations, the IMU-camera rigid-
body translation mainly depends on the initial values
set in the optimizer. In order to estimate the optimal
values for the translation part, multiple experiments
should be executed with zeros as initial conditions
with large data sets. Based on the quality of the IMU
still calibration values, all the experiments will con-
verge to relative values, as shown in Table 3.
4.2 Application II: GPS-Aided Pose
Estimation
Two ablation studies are carried out to assess the con-
tribution of the GPS sensor to the accuracy of the
pose estimation when the depth information is avail-
able or not available. Standard VIO evaluation met-
rics (Chen et al., 2022) are used for assessment: Root
Mean Square Absolute Trajectory Error (RMS ATE
p
[m]) and Relative Pose Error (RPE
p
[m]).
4.2.1 Ablation Study on a Simulated Ground
Vehicle
In the first ablation study, we assess the performance
of our depth-incorporated pose estimation with GPS-
aided bootstrapping compared to the latest state-of-
the-art VIO systems that do not utilize GPS read-
ings in their estimations. We compare our GPS-
aided RGB-D-IMU pose estimation accuracy with
Figure 9: Synthesizing low-rate noisy DT-GPS readings
with three frequencies [10,5,1] Hz on EuRoC V2-01 se-
quence and performing the B-spline interpolation (CT-GPS)
with manifolds of degree (n=3,5,7). Blue denotes the most
accurate, red denotes the least accurate, and green denotes
the parameters used in our experiments (n=3, f=10Hz).
RMSE is the accuracy evaluation metric.
that of ORB-SLAM3 (RGB-D) (Campos et al., 2021),
BASALT (2×RGB-IMU) (Usenko et al., 2019), and
DUI-VIO (RGB-D-IMU) (Zhang and Ye, 2020) sys-
tems using both VCU-RVI and CARLA sequences.
During the evaluation of the DUI-VIO (Zhang and
Ye, 2020) system, we noticed an initialization failure
with the S1 sequence till the system initialized suc-
cessfully at the end of the speed bump at nearly 30
m as magnified in Figure 8 (#1). This initialization
problem is not witnessed with the VCU-RVI hand-
eye calibration sequence due to its complex combined
motions (see Figure 1 (right)). Sequences (S2, S3)
are simulated with a high combined motion to ensure
the optimal checkerboard coverage for all the RGB-D
camera frames. The complex motion generated suffi-
cient IMU excitation to initialize BASALT and DUI-
VIO.
In our analysis in Table 4, the quantitative results
show superior performance for our method compared
to other approaches. Indeed, the pose estimation error
is reduced by 54.55%, 62.96%, and 82.91% compared
to ORB-SLAM3, BASALT, and DUI-VIO, respec-
tively. This happens thanks to our fast bootstrapping
GPS-aided method that decreases the relative pose er-
ror accumulation with time.
4.2.2 Ablation Study on a Real-World Aerial
Vehicle
To further validate the performance of our pose es-
timation method in a real-world application, we per-
form another ablation study. The experiments of this
study were performed on the EuRoC MAV dataset
(Burri et al., 2016) incorporating RGB-IMU sensors
and compared to the continuous-time and discrete-
time (CT/DT) GPS-based SLAM system proposed in
Robust RGB-D-IMU Calibration Method Applied to GPS-Aided Pose Estimation
91
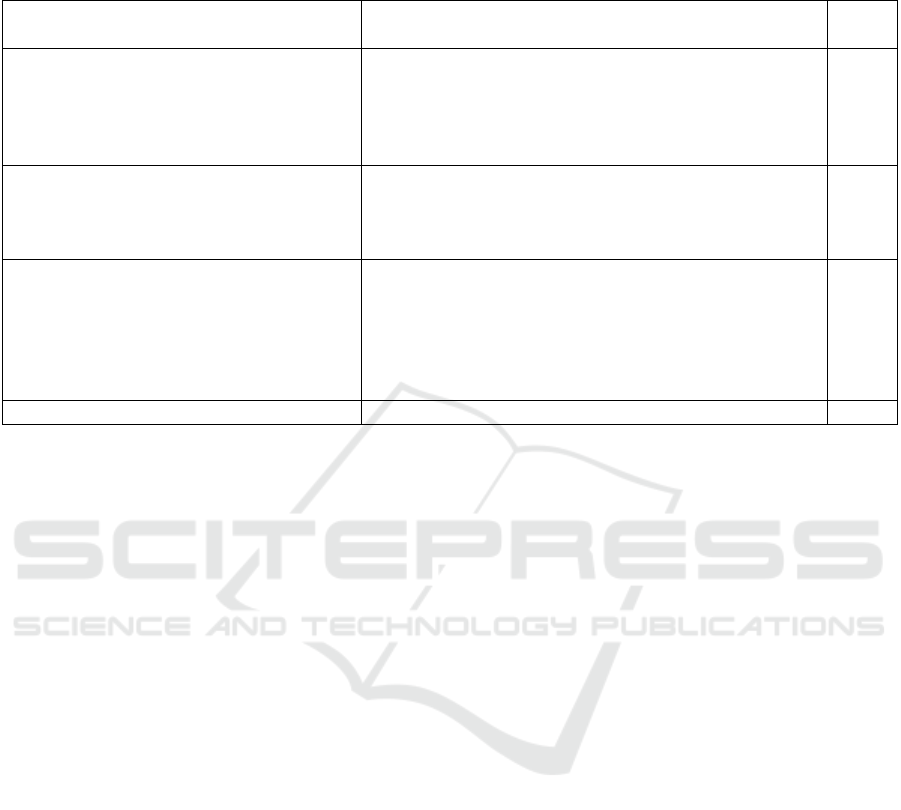
Table 5: Ablation study on the contribution of the GPS sensor on the system accuracy when depth information is unavailable.
∗
denotes tracking features in 5 consecutive frames instead of 10 due to the rapid motion of the MAV.
+
denotes the only
learning-based baseline in the table and the only method incorporating LiDAR point clouds. V,I,G: Vision, IMU, and GPS.
Method
EuRoC (Burri et al., 2016) (RMS ATE
p
[m])
Avg.
V1-01 V1-02 V1-03 V2-01 V2-02 V2-03
Mono-VI
OKVIS (Leutenegger et al., 2015) 0.090 0.200 0.240 0.130 0.160 0.290 0.185
ROVIO (Bloesch et al., 2015) 0.100 0.100 0.140 0.120 0.140 0.140 0.123
VINS-Mono (Qin et al., 2018) 0.047 0.066 0.180 0.056 0.090 0.244 0.114
OpenVINS (Geneva et al., 2020) 0.056 0.072 0.069 0.098 0.061 0.286 0.107
CodeVIO
+
(Zuo et al., 2021) 0.054 0.071 0.068 0.097 0.061 0.275 0.104
Stereo-VI
VINS-Fusion (Qin et al., 2019) 0.076 0.069 0.114 0.066 0.091 0.096 0.085
BASALT (Usenko et al., 2019) 0.040 0.020 0.030 0.030 0.020 0.050 0.032
Kimera (Rosinol et al., 2020) 0.050 0.110 0.120 0.070 0.100 0.190 0.107
ORB-SLAM3 (Campos et al., 2021) 0.038 0.014 0.024 0.032 0.014 0.024 0.024
Mono-V/I/G
CT (V+I+G) (Cioffi et al., 2022) 0.024 0.014 0.011 0.012 0.010 0.010 0.014
CT (V+G) (Cioffi et al., 2022) 0.011 0.013 0.012 0.009 0.008 0.012 0.011
CT (I+G) (Cioffi et al., 2022) 0.062 0.102 0.117 0.112 0.164 0.363 0.153
DT (V+I+G) (Cioffi et al., 2022) 0.016 0.024 0.018 0.009 0.018 0.033 0.020
DT (V+G) (Cioffi et al., 2022) 0.010 0.025 0.024 0.010 0.012 0.029 0.018
DT (I+G) (Cioffi et al., 2022) 0.139 0.137 0.138 0.138 0.138 0.139 0.138
Proposed (Lvl.1) 0.008 0.017
∗
0.023
∗
0.008 0.022 0.025
∗
0.017
(Cioffi et al., 2022). Since a comparison with the
competing technique (Cioffi et al., 2022), combining
GPS signals computed from the Vicon system mea-
surements better emphasizes the findings of this abla-
tion research, we chose the identical six Vicon room
sequences from the EuRoC benchmark they used in
their evaluation.
The GPS readings for EuRoC sequences are gen-
erated with the same realistic model and parameters
given in (Cioffi et al., 2022) that gives a real-world
accuracy but does not suffer from limitations as mul-
tipath effects (Obst et al., 2012). CARLA GPS sensor
is modeled as most commercial sensors containing a
particular bias with a random noise seed and a zero
mean Gaussian noise added to every reading. The
most prominent conclusion from Figure 9 is that as
the GPS rate increases, the CT-GPS interpolation is
better with a low degree (n) manifold, and vice-versa,
and our GPS-aided initialization method can still be
valid with the lowest GPS frequency ( f = 1 Hz).
The quantitative analysis in Table 5 shows that
our level 1 estimations, with no depth information,
can efficiently estimate a metric-scaled trajectory that
can bootstrap level 2 and outperform other well-
established VIO systems in terms of accuracy. We
also notice an improvement in estimation accuracy
with adding a sensor modality (IMU/GPS), given that
at least one visual sensor is present in the system. An-
other conclusion is that a GPS can be sufficient with
the optical sensor to get a reliable trajectory estimate
in a tightly-coupled fusion scheme. For a loosely-
coupled fusion scheme (proposed Lvl.1), adding a gy-
roscope increases the confidence of the optimizer to
converge to reasonable values.
5 CONCLUSION
This paper proposes the first baseline method for ro-
bust RGB-D-IMU intrinsic and extrinsic calibration.
We first present an RGB-GPS-Gyro optimizer boot-
strapping approach that estimates metric-scaled tar-
get’s pose reliable for the calibration process. Then,
we define a cloud-scale factor for an RGB-D spatially
aligned untextured depth map that estimates its scale
by incorporating the initially reconstructed cloud’s
uncertainty.
Experimental results on real-world and simulated
sequences show the effectiveness of our method. That
gives the main conclusion that it can be considered
the building block of a novel RGB-D GPS-aided VI-
SLAM system with a reliable online calibration al-
gorithm. In future work, it is indispensable to incor-
porate situations where GPS sensor limitations cannot
be simulated as the multipath effects on the optimizer.
Finally, it will be essential to generalize the BA op-
timization problem further to extend the algorithm’s
calibration capability to include multiple IMUs with
multiple vision sensors (RGB and depth).
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
92

REFERENCES
Agarwal, S., Mierle, K., and Team, T. C. S. (2022). Ceres
Solver.
Antonante, P., Tzoumas, V., Yang, H., and Carlone, L.
(2021). Outlier-robust estimation: Hardness, min-
imally tuned algorithms, and applications. IEEE
Transactions on Robotics, 38(1):281–301.
Barath, D., Noskova, J., Ivashechkin, M., and Matas, J.
(2020). MAGSAC++, a fast, reliable and accurate ro-
bust estimator. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Basso, F., Menegatti, E., and Pretto, A. (2018). Robust in-
trinsic and extrinsic calibration of RGB-D cameras.
IEEE Transactions on Robotics, 34(5):1315–1332.
Black, M. J. and Anandan, P. (1996). The Robust Estima-
tion of Multiple Motions: Parametric and Piecewise-
Smooth Flow Fields. Computer Vision and Image Un-
derstanding, 63(1):75–104.
Bloesch, M., Omari, S., Hutter, M., and Siegwart, R.
(2015). Robust visual inertial odometry using a di-
rect EKF-based approach. In 2015 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS), pages 298–304.
Brunetto, N., Salti, S., Fioraio, N., Cavallari, T., and Ste-
fano, L. (2015). Fusion of inertial and visual mea-
surements for RGB-D slam on mobile devices. In
Proceedings of the IEEE International Conference on
Computer Vision Workshops, pages 1–9.
Burri, M., Nikolic, J., Gohl, P., Schneider, T., Rehder, J.,
Omari, S., Achtelik, M. W., and Siegwart, R. (2016).
The EuRoC micro aerial vehicle datasets. The Inter-
national Journal of Robotics Research, 35(10):1157–
1163.
Campos, C., Elvira, R., Rodr
´
ıguez, J. J. G., Montiel, J. M.,
and Tard
´
os, J. D. (2021). OrbSLAM3: An accu-
rate open-source library for visual, visual–inertial,
and multimap slam. IEEE Transactions on Robotics,
37(6):1874–1890.
Chai, W., Chen, C., and Edwan, E. (2015). Enhanced indoor
navigation using fusion of IMU and RGB-D camera.
In International Conference on Computer Information
Systems and Industrial Applications, pages 547–549.
Atlantis Press.
Chang, Z., Meng, Y., Liu, W., Zhu, H., and Wang, L. (2022).
WiCapose: multi-modal fusion based transparent au-
thentication in mobile environments. Journal of Infor-
mation Security and Applications, 66:103130.
Chen, W., Shang, G., Ji, A., Zhou, C., Wang, X., Xu, C.,
Li, Z., and Hu, K. (2022). An Overview on Visual
SLAM: From Tradition to Semantic. Remote Sensing,
14(13).
Chghaf, M., Rodriguez, S., and Ouardi, A. E. (2022). Cam-
era, LiDAR and multi-modal SLAM systems for au-
tonomous ground vehicles: a survey. Journal of Intel-
ligent & Robotic Systems, 105(1):1–35.
Chow, J. C., Lichti, D. D., Hol, J. D., Bellusci, G., and
Luinge, H. (2014). IMU and multiple RGB-D camera
fusion for assisting indoor stop-and-go 3D terrestrial
laser scanning. Robotics, 3(3):247–280.
Chu, C. and Yang, S. (2020). Keyframe-based RGB-D
visual-inertial odometry and camera extrinsic calibra-
tion using Extended Kalman Filter. IEEE Sensors
Journal, 20(11):6130–6138.
Cioffi, G., Cieslewski, T., and Scaramuzza, D. (2022).
Continuous-time vs. discrete-time vision-based
SLAM: A comparative study. IEEE Robotics Autom.
Lett., 7(2):2399–2406.
Darwish, W., Li, W., Tang, S., and Chen, W. (2017a).
Coarse to fine global RGB-D frames registration for
precise indoor 3D model reconstruction. In 2017
International Conference on Localization and GNSS
(ICL-GNSS), pages 1–5. IEEE.
Darwish, W., Tang, S., Li, W., and Chen, W. (2017b). A
new calibration method for commercial RGB-D sen-
sors. Sensors, 17(6):1204.
Das, A., Elfring, J., and Dubbelman, G. (2021). Real-
time vehicle positioning and mapping using graph op-
timization. Sensors, 21(8):2815.
Forster, C., Carlone, L., Dellaert, F., and Scaramuzza,
D. (2016). On-manifold preintegration for real-
time visual–inertial odometry. IEEE Transactions on
Robotics, 33(1):1–21.
Geneva, P., Eckenhoff, K., Lee, W., Yang, Y., and Huang,
G. (2020). OpenVINS: a research platform for visual-
inertial estimation. In 2020 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
4666–4672.
Guo, C. X. and Roumeliotis, S. I. (2013). IMU-RGBD cam-
era 3D pose estimation and extrinsic calibration: Ob-
servability analysis and consistency improvement. In
2013 IEEE International Conference on Robotics and
Automation, pages 2935–2942. IEEE.
Heyden, A. and Pollefeys, M. (2005). Multiple view geom-
etry. Emerging topics in computer vision, 90:180–189.
Huai, J., Zhuang, Y., Lin, Y., Jozkow, G., Yuan, Q., and
Chen, D. (2022). Continuous-time spatiotemporal
calibration of a rolling shutter camera-IMU system.
IEEE Sensors Journal, 22(8):7920–7930.
Huber, P. J. (1992). Robust estimation of a location param-
eter. In Breakthroughs in statistics, pages 492–518.
Springer.
Hug, D., Banninger, P., Alzugaray, I., and Chli, M.
(2022). Continuous-time stereo-inertial odometry.
IEEE Robotics and Automation Letters, pages 1–1.
Jung, K., Shin, S., and Myung, H. (2022). U-VIO: Tightly
Coupled UWB Visual Inertial Odometry for Robust
Localization. In International Conference on Robot
Intelligence Technology and Applications, pages 272–
283. Springer.
Laidlow, T., Bloesch, M., Li, W., and Leutenegger, S.
(2017). Dense RGB-D-inertial SLAM with map de-
formations. In 2017 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
6741–6748. IEEE.
Lee, J., Hanley, D., and Bretl, T. (2022). Extrinsic calibra-
tion of multiple inertial sensors from arbitrary trajec-
tories. IEEE Robotics and Automation Letters.
Robust RGB-D-IMU Calibration Method Applied to GPS-Aided Pose Estimation
93

Leutenegger, S., Lynen, S., Bosse, M., Siegwart, R., and
Furgale, P. (2015). Keyframe-based visual–inertial
odometry using nonlinear optimization. The Interna-
tional Journal of Robotics Research, 34(3):314–334.
Ling, Y., Liu, H., Zhu, X., Jiang, J., and Liang, B.
(2018). RGB-D inertial odometry for indoor robot
via Keyframe-based nonlinear optimization. In 2018
IEEE International Conference on Mechatronics and
Automation (ICMA), pages 973–979. IEEE.
Liu, H., Qu, D., Xu, F., Zou, F., Song, J., and Jia, K. (2020).
Approach for accurate calibration of RGB-D cameras
using spheres. Opt. Express, 28(13):19058–19073.
Nist
´
er, D. (2004). An efficient solution to the five-point
relative pose problem. IEEE transactions on pattern
analysis and machine intelligence, 26(6):756–770.
Obst, M., Bauer, S., Reisdorf, P., and Wanielik, G. (2012).
Multipath detection with 3D digital maps for robust
multi-constellation gnss/ins vehicle localization in ur-
ban areas. In 2012 IEEE Intelligent Vehicles Sympo-
sium, pages 184–190.
Ovr
´
en, H., Forss
´
en, P.-E., and T
¨
ornqvist, D. (2013). Why
would I want a gyroscope on my RGB-D sensor? In
2013 IEEE Workshop on Robot Vision (WORV), pages
68–75. IEEE.
Qin, T., Li, P., and Shen, S. (2018). VINS-Mono: a robust
and versatile monocular visual-inertial state estimator.
IEEE Transactions on Robotics, 34(4):1004–1020.
Qin, T., Pan, J., Cao, S., and Shen, S. (2019). A gen-
eral optimization-based framework for local odome-
try estimation with multiple sensors. arXiv preprint
arXiv:1901.03638.
Rehder, J., Nikolic, J., Schneider, T., Hinzmann, T., and
Siegwart, R. (2016). Extending kalibr: Calibrating the
extrinsics of multiple IMUs and of individual axes. In
2016 IEEE International Conference on Robotics and
Automation (ICRA), pages 4304–4311. IEEE.
Rosinol, A., Abate, M., Chang, Y., and Carlone, L. (2020).
Kimera: an open-source library for real-time metric-
semantic localization and mapping. In 2020 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 1689–1696. IEEE.
Shan, Z., Li, R., and Schwertfeger, S. (2019). RGBD-
inertial trajectory estimation and mapping for ground
robots. Sensors, 19(10):2251.
Shi, J. and Tomasi (1994). Good features to track. In 1994
Proceedings of IEEE Conference on Computer Vision
and Pattern Recognition, pages 593–600.
Soliman, A., Bonardi, F., Sidib
´
e, D., and Bouchafa, S.
(2022). IBISCape: A simulated benchmark for multi-
modal SLAM systems evaluation in large-scale dy-
namic environments. Journal of Intelligent & Robotic
Systems, 106(3):53.
Sommer, C., Usenko, V., Schubert, D., Demmel, N., and
Cremers, D. (2020). Efficient derivative computa-
tion for cumulative b-splines on lie groups. In 2020
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, CVPR 2020, Seattle, WA, USA, June
13-19, 2020, pages 11145–11153. IEEE.
Staranowicz, A., Brown, G. R., Morbidi, F., and Mariottini,
G. L. (2014). Easy-to-Use and accurate calibration of
RGB-D cameras from spheres. In Klette, R., Rivera,
M., and Satoh, S., editors, Image and Video Tech-
nology, pages 265–278, Berlin, Heidelberg. Springer
Berlin Heidelberg.
Surber, J., Teixeira, L., and Chli, M. (2017). Robust visual-
inertial localization with weak GPS priors for repet-
itive UAV flights. In 2017 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
6300–6306.
Tomasi, C. and Kanade, T. (1991). Detection and tracking
of point. Int J Comput Vis, 9:137–154.
Usenko, V., Demmel, N., Schubert, D., St
¨
uckler, J., and
Cremers, D. (2019). Visual-inertial mapping with
non-linear factor recovery. IEEE Robotics and Au-
tomation Letters, 5(2):422–429.
Voges, R. and Wagner, B. (2018). Timestamp offset cali-
bration for an IMU-Camera system under interval un-
certainty. In 2018 IEEE/RSJ International Conference
on Intelligent Robots and Systems (IROS), pages 377–
384.
Wang, Y. and Chirikjian, G. S. (2008). Nonparametric
second-order theory of error propagation on motion
groups. The International journal of robotics re-
search, 27(11-12):1258–1273.
Xiao, X., Zhang, Y., Li, H., Wang, H., and Li, B. (2022).
Camera-IMU Extrinsic Calibration Quality Monitor-
ing for Autonomous Ground Vehicles. IEEE Robotics
and Automation Letters, 7(2):4614–4621.
Zhang, H., Jin, L., and Ye, C. (2020). The VCU-RVI Bench-
mark: Evaluating Visual Inertial Odometry for Indoor
Navigation Applications with an RGB-D Camera. In
2020 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 6209–6214.
Zhang, H. and Ye, C. (2020). DUI-VIO: Depth uncer-
tainty incorporated visual inertial odometry based on
an RGB-D camera. In 2020 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 5002–5008. IEEE.
Zhang, Y., Liang, W., Zhang, S., Yuan, X., Xia, X., Tan,
J., and Pang, Z. (2022). High-precision Calibra-
tion of Camera and IMU on Manipulator for Bio-
inspired Robotic System. Journal of Bionic Engineer-
ing, 19(2):299–313.
Zhang, Z. (2000). A flexible new technique for camera cal-
ibration. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 22(11):1330–1334.
Zheng, L. and Zhang, X. (2017). Chapter 8 - numerical
methods. In Zheng, L. and Zhang, X., editors, Mod-
eling and Analysis of Modern Fluid Problems, Math-
ematics in Science and Engineering, pages 361–455.
Academic Press.
Zhou, Y., Chen, D., Wu, J., Huang, M., and Weng, Y.
(2022). Calibration of RGB-D camera using depth
correction model. Journal of Physics: Conference Se-
ries, 2203(1):012032.
Zuo, X., Merrill, N., Li, W., Liu, Y., Pollefeys, M., and
Huang, G. P. (2021). CodeVIO: visual-inertial odom-
etry with learned optimizable dense depth. 2021 IEEE
International Conference on Robotics and Automation
(ICRA), pages 14382–14388.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
94
