
Masking and Mixing Adversarial Training
Hiroki Adachi
1 a
, Tsubasa Hirakawa
1 b
, Takayoshi Yamashita
1 c
, Hironobu Fujiyoshi
1 d
,
Yasunori Ishii
2 e
and Kazuki Kozuka
2 f
1
Chubu University, 1200 Matsumoto-cho, Kasugai, Aichi, Japan
2
Panasonic Corporation, Japan
Keywords:
Deep Learning, Convolutional Neural Networks, Adversarial Defense, Adversarial Training, Mixup.
Abstract:
While convolutional neural networks (CNNs) have achieved excellent performances in various computer vi-
sion tasks, they often misclassify with malicious samples, a.k.a. adversarial examples. Adversarial training is
a popular and straightforward technique to defend against the threat of adversarial examples. Unfortunately,
CNNs must sacrifice the accuracy of standard samples to improve robustness against adversarial examples
when adversarial training is used. In this work, we propose Masking and Mixing Adversarial Training (M
2
AT)
to mitigate the trade-off between accuracy and robustness. We focus on creating diverse adversarial examples
during training. Specifically, our approach consists of two processes: 1) masking a perturbation with a binary
mask and 2) mixing two partially perturbed images. Experimental results on CIFAR-10 dataset demonstrate
that our method achieves better robustness against several adversarial attacks than previous methods.
1 INTRODUCTION
In computer vision, deep convolutional neural net-
works (CNNs) have achieved excellent performances
for various tasks such as image classification (He
et al., 2016), image generation (Brock et al., 2019),
object detection (Redmon et al., 2016), and semantic
segmentation (Long et al., 2015). To achieve these ex-
cellent performances, an enormous number of train-
ing samples or an increased diversity of samples us-
ing data augmentation (Zhang et al., 2018)(Yun et al.,
2019)(Qin et al., 2020) is required. In this way, CNNs
become robust to naturally occurring noise, e.g., rota-
tion or translation and changes to the lighting environ-
ment. However, an image with malicious perturba-
tion (Szegedy et al., 2014), a.k.a. adversarial exam-
ples, induces misclassification with high confidence
for CNNs. This perturbation in adversarial exam-
ples is imperceptible to humans because of slightly.
Adversarial examples influence not only recognition
and classification but also semantic segmentation (Xie
a
https://orcid.org/0000-0001-5920-2633
b
https://orcid.org/0000-0003-3851-5221
c
https://orcid.org/0000-0003-2631-9856
d
https://orcid.org/0000-0001-7391-4725
e
https://orcid.org/0000-0003-4630-3464
f
https://orcid.org/0000-0001-5111-3302
et al., 2017), object detection, and depth estima-
tion (Yamanaka et al., 2020). As this phenomenon
leads to security concerns in CNNs-based AI systems
(e.g., those for autonomous driving or medical diag-
nosis), there are various methods to defend against
adversarial attack (Samangouei et al., 2018)(Meng
and Chen, 2017)(Shafahi et al., 2019)(Wong et al.,
2020)(Goodfellow et al., 2015)(Lee et al., 2020).
Among them, adversarial training (Madry et al.,
2018) is the most popular and effective to improve
the vulnerability of CNNs. Adversarial training trains
adversarial examples generated by projected gradient
descent (Madry et al., 2018). While CNNs become
robust against such adversarial perturbations with ad-
versarial training, they degrades the classification per-
formance for benign samples. This trade-off between
accuracy and robustness has been demonstrated both
theoretically and empirically from various aspects by
many researchers.
Schmidt et al. (Schmidt et al., 2018) theoretically
proved that adversarial training requires vaster and
more complex data than the standard training for ob-
taining robustness. Yin et al. (Yin et al., 2019) investi-
gated the trade-off issue by performing spectral anal-
ysis of clean samples, adversarial examples, and sam-
ples to which data augmentation (e.g., Gaussian noise
or fog) had been applied and showed that the trade-off
occurs because adversarial examples involve higher
74
Adachi, H., Hirakawa, T., Yamashita, T., Fujiyoshi, H., Ishii, Y. and Kozuka, K.
Masking and Mixing Adversarial Training.
DOI: 10.5220/0011653300003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
74-82
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

frequency components than clean samples do. Tsipras
et al. (Tsipras et al., 2019) demonstrated through var-
ious experiments that adversarial training and stan-
dard training capture different features. We feel this
is probably due to the frequency bandwidth, as sug-
gested by Yin et al.. Lee et al. (Lee et al., 2020)
investigated Adversarial Feature Overfitting (AFO),
which involves model parameters optimized to an un-
expected direction, and proposed Adversarial Vertex
mixup (AVmixup) as a strategy for avoiding AFO.
To summarize the above works, the trade-off
stems from overfitting, which is caused by adversar-
ial training with a limited coverage dataset. With
this issue in mind, we propose a method for comput-
ing adversarial examples during adversarial training,
which can obtain excellent robustness while maintain-
ing standard accuracy. AVmixup extended the cover-
age of the training manifold by using label smooth-
ing and interpolation between clean samples and vir-
tual perturbations, thus preserving overfitting. Al-
though the authors did not prove it experimentally,
(Guo et al., 2019) showed that interpolated data can
be mapped to another manifold. While AVmixup
can achieve an excellent performance, perturbed im-
age variation for adversarial training remains limited.
To train with rich variation of perturbed images, we
propose Masking and Mixing Adversarial Training
(M
2
AT), which mitigates the trade-off by mixing un-
equal magnitudes of perturbation in a sample. Our
method consists following two processes: 1) masking
the perturbation with a binary mask, which is defined
such that the perturbation is located inside/outside the
rectangle, and 2) mixing two partially perturbed im-
ages with an arbitrary mixing rate sampled from a
beta distribution. In summary, our work makes the
following contributions:
• We propose a powerful defense method that can
mitigate the gap between accuracy and robustness
by using adversarial examples with richer varia-
tion than prior works during training.
• We demonstrate through experiments that our
method achieves state-of-the-art robustness on
CIFAR-10 and discuss the interesting phe-
nomenon observed in the experiments.
2 PRELIMINARIES
Notations. We conduct a training dataset D =
{x
x
x
i
,y
i
}
n
i
where x
x
x
i
∈ R
c×h×w
is an image and y
i
∈ Y =
{0,1,...,K − 1} is the ground truth to x
x
x
i
. We denote
a model f : R
c×h×w
→ R
K
parameterized by θ
θ
θ, and
a loss function L( f
θ
θ
θ
(x
x
x
i
),y
i
) is a cross entropy loss as
follow:
L( f
θ
θ
θ
(x
x
x
i
),y
i
) = −logσ
y
i
( f
θ
(x
x
x
i
)) (1)
= −log p
y
i
(x
x
x
i
)), (2)
where σ : R
K
→ [0,1]
K
denotes a softmax function,
and both σ
y
i
and p
y
i
denote the true class probabil-
ity. The ℓ
p
distance is written ∥x
x
x
i
∥
p
, where ∥x
x
x
i
∥
p
=
(
∑
n
i=1
|x
x
x
i
|
p
)
1
p
.
In the classification problem, because it is difficult
to observe the data distribution clearly, we use empir-
ical risk minimization:
min
θ
θ
θ
E
(x
x
x
i
,y
i
)∈D
[L( f
θ
θ
θ
(x
x
x
i
),y
i
)], (3)
Unfortunately, while a model trained with above
equation can classify to unknown data (i.e., validation
or test data) somewhat correctly, it is quite vulnerable
to adversarial examples. To protect against this threat,
adversarial training updates the model parameters θ
θ
θ
based on the defined adversarial examples in ℓ
p
-ball,
such that the center is x
x
x and the radius is ε:
min
θ
θ
θ
E
(x
x
x
i
,y
i
)∈D
"
max
∥δ
δ
δ
i
∥
p
≤ε
L( f
θ
θ
θ
(x
x
x
i
+ δ
δ
δ
i
),y
i
)
#
. (4)
For ℓ
p
-ball, we often use ℓ
2
or ℓ
∞
, and the perturba-
tion defined with ℓ
2
causes large alterations to the in-
put image because ∥·∥
∞
< ∥· ∥
2
. In this work, we aim
to construct a model that is robust against the pertur-
bation with ℓ
∞
. The perturbation δ
δ
δ
i
is not empirically
sampled from a space existing on an infinite perturba-
tion, but we create it based on gradients of the model,
generally (Goodfellow et al., 2015)(Carlini and Wag-
ner, 2017)(Madry et al., 2018).
Fast Gradient Sign Method (FGSM) (Goodfellow
et al., 2015): FGSM provides the perturbation with
single step by multiplying radius ε of l
p
-ball by the
unit vector extracted sign for gradients w.r.t. input
data x
x
x
i
:
ˆ
x
x
x
i
= x
x
x
i
+ ε · sign (∇
x
x
x
i
L( f
θ
θ
θ
(x
x
x
i
),y
i
)). (5)
FGSM can compute adversarial examples
ˆ
x
x
x
i
simply
and fast.
Projected Gradient Descent (PGD) (Madry et al.,
2018): Unlike FGSM with single step, PGD is multi-
step attack using a step size α < ε, as
ˆ
x
x
x
(t+1)
i
= Π
B[x
x
x
(0)
i
]
ˆ
x
x
x
(t)
i
+ α · sign
∇
ˆ
x
x
x
(t)
i
L( f
θ
θ
θ
(
ˆ
x
x
x
(t)
i
),y
i
)
,
(6)
where t ∈ N, B[x
x
x
(0)
i
] := {
ˆ
x
x
x
i
∈ X | ∥x
x
x
(0)
i
−
ˆ
x
x
x
i
∥
∞
≤ ε}
in the input space X , and Π is a projection function
that brings outliers into B[x
x
x
(0)
i
]. PGD can compute
more severe perturbations than FGSM by demanding
that the amount of movement to each pixel fits within
ℓ
p
-ball with the projection function Π.
Masking and Mixing Adversarial Training
75

3 METHOD
In this section, we propose Masking and Mixing Ad-
versarial Training (M
2
AT). We aim to improve ro-
bustness against adversarial attacks by creating vari-
ety adversarial examples during training and training
them. In addition, we aim to maintain a standard clas-
sification accuracy to benign samples.
3.1 Overview
Our method computes adversarial perturbations δ
δ
δ ∈
R
c×h×w
from the model gradient by iterative arbitrary
rounds, as shown in Eq. (6). Computed perturbations
do not apply directly to samples but rather via our two
processes.
First, we extract only part of the perturbation with
the binary mask and apply it to the corresponding
regions of the image. Adversarial examples created
with this process are called partially perturbed im-
ages in this paper. The details of how to define and
add this binary mask to the adversarial perturbation
are discussed in Section 3.2.
Next, we create perturbed images by interpolating
two samples, which are perturbed inside/outside, with
an arbitrary probability. Previous works directly add
the computed perturbation to the entire image. Mean-
while, adversarial examples created by our method
inherent two type of magnitude of perturbation. We
define ground truth label to adversarial examples with
a label smoothing. Unlike the classical label smooth-
ing (Szegedy et al., 2016), we use dynamic smoothing
parameter sampled from the beta distribution during
training. The details of these processes are described
in Section 3.3.
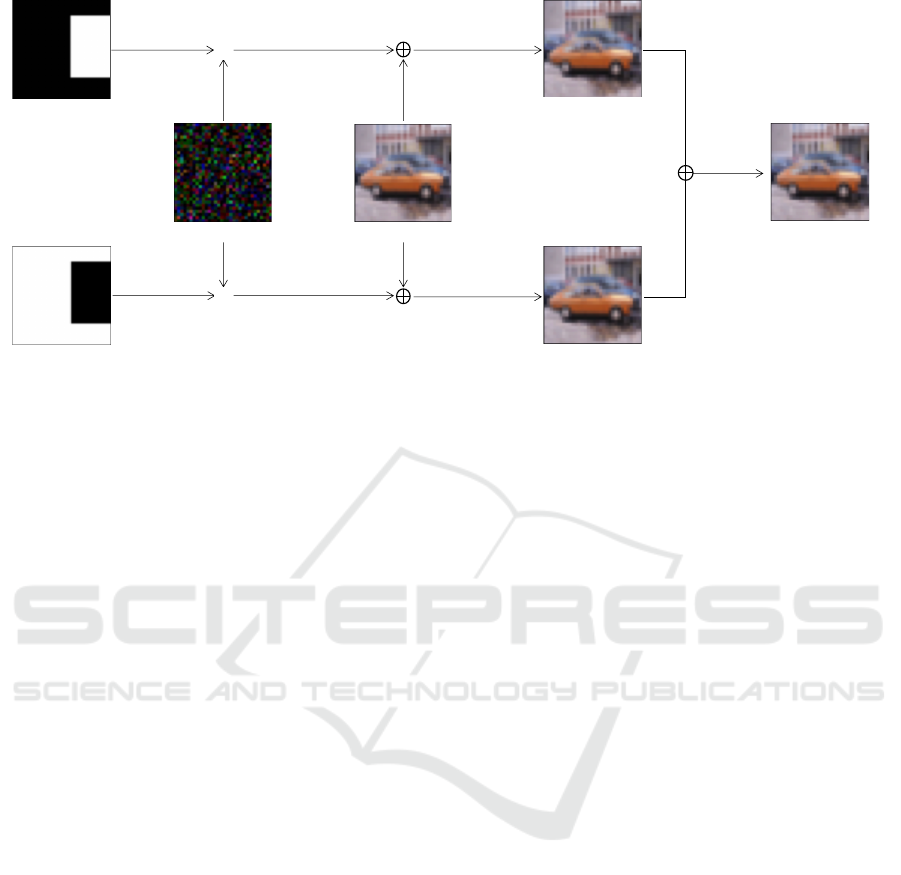
Figure 1 show the conceptual diagram of M
2
AT,
and Algorithm 1 is the pseudo code of our process.
3.2 Masking Phase
In the masking phase, we extract only specific regions
of adversarial perturbation computed by Eq. 6 with
the binary mask M ∈ {0,1}
h×w
, and create partially
perturbed images by applying extracted perturbation
to clean samples x
x
x
i
:
ξ
ξ
ξ
i
= x
x
x
i
+ δ
δ
δ
i
⊙ M, (7)
¯
ξ
ξ
ξ
i
= x
x
x
i
+ δ
δ
δ
i
⊙ (1 − M), (8)
where, ⊙ is element-wise multiply. Following to Cut-
Mix (Yun et al., 2019), we compute the bounding box
coordinates B = (r
x
1
,r
y
1
,r
x
2
,r
y
2
) for extracting the
perturbation with arbitrary probability λ
1
∼ U [0,1]:
Algorithm 1: Masking and Mixing Adversarial Training.
Require: Training dataset D, batch size n, training
epochs T, learning rate η, model parameter θ
θ
θ,
hyper-parameter of beta distribution α
Require: The function deriving adversarial perturba-
tion A
Require: Masking function φ
1: for t = 1, . . . , T do
2: for {x
x
x
i
,y
y
y
i
|i = 1,. . . , n} ∼ D do
3:
ˆ
x
x
x
i
← A(x
x
x
i
,y
y
y
i
;θ
θ
θ)
4: δ
δ
δ
i
←
ˆ
x
x
x
i
− x
x
x
i
, λ
1
∼ U [0,1]
5: data masking and label smoothing phase:
6: ξ
ξ
ξ
i
,
¯
ξ
ξ
ξ
i
,t
t
t
i
,
¯
t
t
t
i
← φ(
ˆ
x
x
x
i
,δ
δ
δ
i
,y
y
y
i
,λ
1
), λ
2
∼
Beta(α,α)
7: data mixing phase:
8:
˜
x
x
x
i
← λ
2
ξ
ξ
ξ
i
+ (1 − λ
2
)
¯
ξ
ξ
ξ
i
9:
˜
y
y
y
i
← λ
2
t
t
t
i
+ (1 − λ
2
)
¯
t
t
t
i
10: model update:
11: θ
θ
θ
t+1
← θ
θ
θ
t
− η ·
1
n
∑
n
i=1
∇
θ
θ
θ
L( f
θ
θ
θ
t
(
˜
x
x
x
i
),
˜
y
y
y
i
)
12: end for
13: end for
14: return model parameter θ
θ
θ
r
x
1
∼ U[0,W ], r
x
2
= min
W,W
p
1 − λ
1
+ r
x
1
, (9)
r
y
1
∼ U[0, H], r
y
2
= min
H,H
p
1 − λ
1
+ r
y
1
, (10)
where H and W are respectively height and width of
images. Note, both r
x
1
and r
y
1
sampled from U[0,W ]
and U[0, H] are not real number R but integer greater
than 0, i.e., Z
≥0
. We eventually get the binary mask
M as follows:
M =
(
1 if r
x
1
< M
:, j
< r
x
2
,r
y
1
< M
i,:
< r
y
2
,
0 otherwise.
(11)
There is an inverse relation between ξ
ξ
ξ
i
and
¯
ξ
ξ
ξ
i
: i.e.,
with/without the perturbed region is the same.
The ground truth label to perturbed images ob-
tained by these processes does not directly use λ
1
;
rather, we define smoothed labels with the area
ratio between clean and perturbed regions λ
′
1
=
(
r
x
2
−r
x
1
)
×
(
r
y
2
−r
y
1
)
H×W
:
t
t
t
i
= λ
′
1
y
y
y
i
+ (1 − λ
′
1
)
¯
y
y
y
i
s
s
s, (12)
¯
t
t
t
i
= λ
′
1
¯
y
y
y
i
s
s
s + (1 − λ
′
1
)y
y
y
i
, (13)
where y
y
y
i
represents a one-hot vector and
¯
y
y
y
i
is all one
vector except true class y
i
(i.e., 1 − y
y
y
i
). s
s
s is a uniform
distribution assigned uniform probability 1/K − 1 to
all class except for true class y
i
.
3.3 Mixing Phase
AVmixup creates perturbed images by interpolat-
ing clean images and adversarial vertex samples
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
76
! ∈ {0, 1}
!×#
!
(
Perturbation Input image
Partial perturbed
image
Partial perturbed
image
Adversarial example
×*+
$
×*1* − *+
$
Partially perturbed
image
Partially perturbed
image
⊙
⊙
Figure 1: Conceptual diagram of computing adversarial examples for M
2
AT. Our method separates the perturbation with
binary masks, and we mix these two types of adversarial samples stochastically. M is a binary mask with a positive value (i.e.
1), for inside the rectangle.
¯
M represents the contrasting binary mask for M. ⊙ and ⊕ represent element-wise multiply and
sum, respectively. λ
2
is the interpolation ratio and samples from Beta(α,α).
with an arbitrary interpolation ratio sampled from
Beta(1,1) = U[0, 1]. However, AVmixup is it limited
in terms of the amount of perturbed image variations
because they have a uniformly perturbed magnitude
over all the images.
Since we attempt to reduce the trade-off by aug-
menting the perturbed image variation, our method
uses the mixing phase for synthesizing two samples
computed in the masking phase. In the mixing phase,
we apply the perturbation to the entire image by mix-
ing two attacked images with an arbitrary interpola-
tion ratio, inspired by mixup (Zhang et al., 2018).
Note that perturbed images obtained via our method
have two types of perturbation magnitude in a single
image.
Let λ
2
∼ Beta(1,1). We then represent mixed
sample
˜
x
x
x
i
and ground truth label
˜
y
y
y
i
as follows:
˜
x
x
x
i
= λ
2
ξ
ξ
ξ
i
+ (1 − λ
2
)
¯
ξ
ξ
ξ
i
, (14)
˜
y
y
y
i
= λ
2
t
t
t
i
+ (1 − λ
2
)
¯
t
t
t
i
. (15)
This perturbed image is the same as AVmixup
with γ = 1 when λ
1
in the masking phase is 0 or 1.
We hope to improve the robustness by enabling the
model to train with a richer variation of adversarial
examples than AVmixup.
4 RELATED WORK
(Szegedy et al., 2014) is the first work that han-
dled the vulnerability of CNNs to malicious noise,
called adversarial examples. Adversarial attack
methods for attacking CNNs have since been pro-
posed using various processes. (Goodfellow et al.,
2015)(Moosavi-Dezfooli et al., 2016)(Carlini and
Wagner, 2017)(Madry et al., 2018) derive adversar-
ial perturbations with the model gradients. These
attack methods presuppose a situation in which the
model parameters are known and are therefore called
white-box attacks. In contrast, the attack methods
for situations with unknown model parameters are
called black-box attacks. Papernot et al. is a well-
known black-box attack that deals with the transfer-
based threat of adversarial examples (Papernot et al.,
2016a). (Moosavi-Dezfooli et al., 2017) proposed
universal adversarial examples that do not decide the
perturbation for each sample but can induce misclas-
sification of multiple samples with only one perturba-
tion.
A model without countermeasures against adver-
sarial examples can fool even state-of-the-art models.
Adversarial defense studies are being actively con-
ducted to resolve this weakness and various power-
ful methods have been proposed. (Goodfellow et al.,
2015)(Madry et al., 2018)(Tram
`
er et al., 2018)(Wang
and Zhang, 2019)(Zhang and Wang, 2019) guarantee
model robustness by updating the model parameters
with adversarial examples. These methods have been
known adversarial training. (Papernot et al., 2016b)
is a defense method with knowledge distillation that
makes deriving the gradient difficult by controlling
the temperature of the softmax function. (Meng and
Chen, 2017)(Samangouei et al., 2018) are defensive
techniques that prevent performance corruption by re-
Masking and Mixing Adversarial Training
77
moving the perturbation as much as possible from the
sample after inputting a classifier.
5 EXPERIMENT
We compare our method with several previous works
to evaluate its defensive performance. We use
CIFAR-10/-100 as training datasets. CIFAR-10 is a
natural image dataset with ten classes of 32 ×32 RGB
data consisting of 50,000 training samples and 10,000
test samples. Each class has 5,000 samples for train-
ing and 1,000 samples for testing. CIFAR-100 is al-
most the same as CIFAR-10 except it has 100 classes,
with 500 training samples and 100 test samples in
each class.
5.1 Implementation Details
We use WRN34-10 (Wide Residual Net-
works) (Zagoruyko and Komodakis, 2016) on
both CIFAR-10 and CIFAR-100. The model trains
200 epochs (80,000 iterations) with a batch size of
128. The optimizer at training uses momentum SGD
with learning rate 0.1, momentum 0.9, and weight
decay 2.0 × 10
−4
. The learning rate is a factor of
0.1 at 50% and 75% for the number of epochs on
CIFAR-10.
Training samples use random crop and horizontal
flip as data augmentation and the normalization range
[0, 1] for each pixel. We use the number of rounds k =
10, epsilon budget ε = 8, and step size α = 2 for PGD
during our training. We divide by 255 for each pixel
because both ε and α need to fit the training sample
scale.
We evaluate the robustness of the trained model
with FGSM (Goodfellow et al., 2015), PGD (Madry
et al., 2018), and Carlini & Wagner (CW) (Carlini and
Wagner, 2017) as adversarial attack methods. k of
PGD-k and CW-k represents the number of rounds
for deriving adversarial examples. We compare our
method with the methods below.
• Standard: the model trained with standard training
data only.
• PGD: the PGD-trained model with number of
rounds k = 10 and ε = 8/255, α = 2/255.
• PGD with LS: the PGD-trained model with label
smoothing. A smoothing parameter samples from
Beta(1,1) during training.
• AVmixup: the model trained with the same set-
tings as (Lee et al., 2020).
0
10
20
30
40
50
60
70
80
90
100
1 51 101 151
Accuracy (%)
training epochs
0
10
20
30
40
50
60
70
80
90
100
1 51 101 151
Accuracy (%)
training epochs
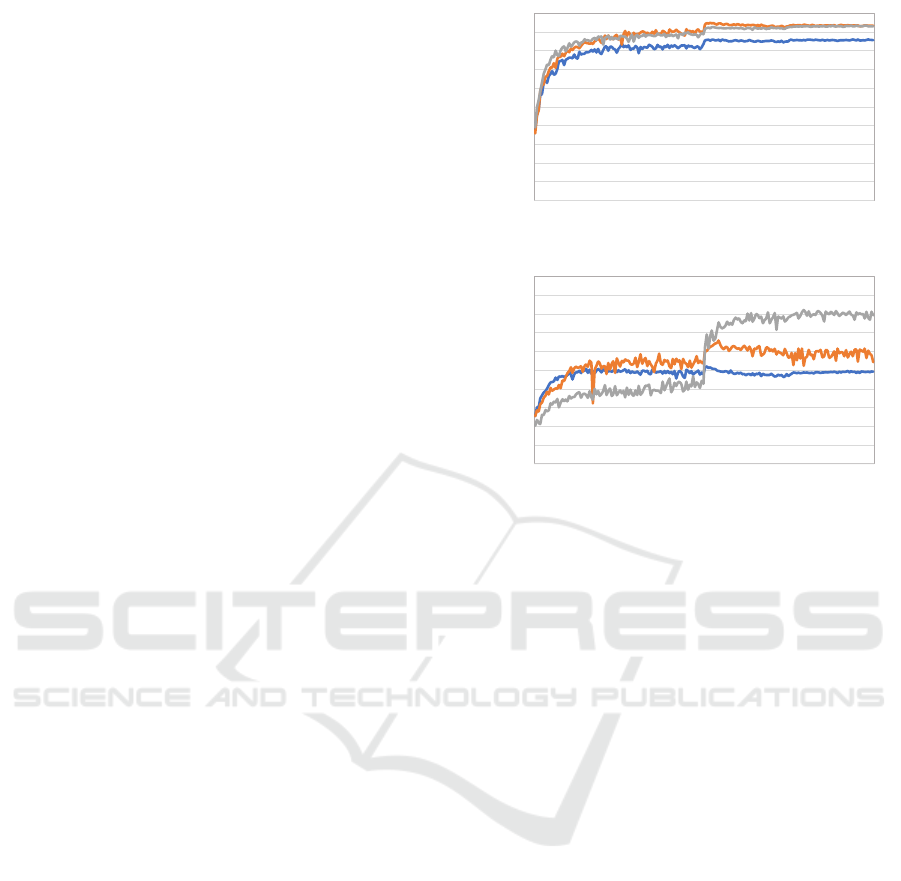
(a) Standard accuracy
(b) Adversarial robustness
Figure 2: Test accuracy transitions during training of clean
data and adversarial examples. The perturbation for adver-
sarial example derives by PGD with 10 rounds. Blue lines
are PGD, orange lines are AVmixup of our implementation,
and gray lines are M
2
AT.
Experimental results for all methods show the best
model, i.e., the highest-robustness model against
PGD-20 within training epochs, performance.
5.2 Comparison Results
The results on CIFAR-10 are listed in Table 1.
M
2
AT achieved a dramatic performance improvement
for the adversarial attack with FGSM and PGD-10/-
20. Its classification accuracy to clean samples was
the same as that of AVmixup, and M
2
AT could pre-
vent extreme performance decreases. For the CW re-
sult, classification performance only improved about
3%p from the AVmixup result. Both PGD-10 and -
20 with our method achived over 80% and improved
by about 30%p compared to PGD and by about 20%p
compared to AVmixup. As shown the gray line in
Figure 2(b), M
2
AT could avoid robust overfitting at
the same as AVmixup. The gap between accuracy and
robustness dramatically improved for several attacks
other than CW by using M
2
AT. Moreover, the re-
sult that fit the base model to BAT (Wang and Zhang,
2019) outperformed BAT in terms of both clean accu-
racy and robustness.
In Table 1, all methods except ours had a gap of
about 10%p between FGSM and PGD-10/-20 accu-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
78
Table 1: Comparison of classification accuracy to clean data and robustness for adversarial attack with various methods. PGD
with LS represents PGD results using label smoothing with dynamic smoothing parameter. Results with * are those referenced
from original articles.
Dataset Model Clean FGSM PGD-10 PGD-20 CW-20
CIFAR-10
Standard 95.48 7.25 0.0 0.0 0.0
PGD 85.83 58.66 52.09 50.80 30.16
PGD with LS 86.33 61.67 55.87 54.78 30.36
BAT (Wang and Zhang, 2019)* 91.2 70.7 – 57.5 56.2
AVmixup* 93.24 78.25 62.67 58.23 53.63
AVmixup 94.81 80.28 69.29 65.01 54.8
M
2
AT (WRN28-10) 92.09 73.67 65.83 63.06 55.04
M
2
AT 93.16 83.35 82.29 80.66 56.90
CIFAR-100
PGD 61.29 46.01 – 25.17 –
AVmixup* 74.81 62.76 – 38.49 –
AVmixup 71.42 53.90 29.04 27.05 19.80
M
2
AT 69.14 32.63 32.63 29.99 18.48
Table 2: Accuracy comparison with TRADES on CIFAR-
10.
Clean PGD-20
PGD 87.3 47.04
TRADES (1/λ = 1) 88.64 49.14
TRADES (1/λ = 6) 84.92 56.61
AVmixup 90.36 58.27
M
2
AT 89.35 69.76
racy. In contrast, our method had hardly any gap be-
tween the two. We discuss this phenomenon in detail
in subsection 5.4.
The results on CIFAR-100 in Table 1 were no
better result than the AVmixup results in (Lee et al.,
2020), but our method performed better than our im-
plemented AVmixup. We could not obtain as good
a result as the previous work even when we changed
the official implementation on CIFAR-10
1
to CIFAR-
100 and trained. When we compare the results of
PGD and our method, FGSM was comparable and the
clean sample and PGD-20 improved by about 7%p
and 10%p, respectively. This demonstrates that our
method is better able to close the gap between accu-
racy and robustness than PGD.
Table 2 shows a performance comparison of our
method with TRADES, a defense method with reg-
ularization. While our method could not achieve as
good a result as AVmixup based on TRADES, but
PGD-20 improved by 10%p. Moreover, we could bet-
ter mitigate the gap between clean accuracy and ro-
bustness against perturbed images than AVmixup.
1
The official implementation of AVmixup:
https://github.com/Saehyung-Lee/cifar10 challenge
Table 3: Ablation results of our method.
Masking Mixing LS Clean FGSM PGD-20
✓ 86.33 61.67 54.78
✓ 89.60 54.75 44.70
✓ ✓ 93.97 74.81 60.96
✓ 89.92 56.36 43.72
✓ ✓ 93.36 65.80 42.46
✓ ✓ 90.21 60.14 49.25
✓ ✓ ✓ 93.16 83.35 80.66
5.3 Ablation Study
Table 3 shows the classification accuracy of our
method with combinations ablating every element,
such as masking, mixing, and label smoothing. We
use a dynamic value sampled from Beta(1,1) as the
smoothing parameter.
We can see here that our model achieved the same
accuracy as AVmixup using just label smoothing. The
accuracy of PGD-20 was higher than that of AVmixup
thanks to creating perturbed images by combined la-
bel smoothing and mixing. This result is equal to
training AVmixup with γ = 1 except the smoothing
parameter is dynamic.
When training directly adversarial samples with
partially applied perturbation using a binary mask, the
performance with regards to robustness was inferior
to PGD (Table 1), but the accuracy to clean samples
slightly improved. This result suggests that we can
mitigate the trade-off by absorbing the frequency dif-
ferences for the clean and adversarial samples with
the model. The same tendency was evident when in-
terpolating adversarial examples and clean samples.
Partially perturbed images further improved the
clean accuracy and robustness against FGSM by train-
ing using label smoothing, but the PGD-20 result was
almost the same. On the other hand, the accuracy
Masking and Mixing Adversarial Training
79
0
10
20
30
40
50
60
70
80
90
100
8 16 32 64 128
0
10
20
30
40
50
60
70
80
90
100
8 16 32 64 128
0
10
20
30
40
50
60
70
80
90
100
8 16 32 64 128
PGD
AVmix u p
M
!
AT
Accuracy (%)
𝜖 -budget 𝜖 -budget
𝜖 -budget
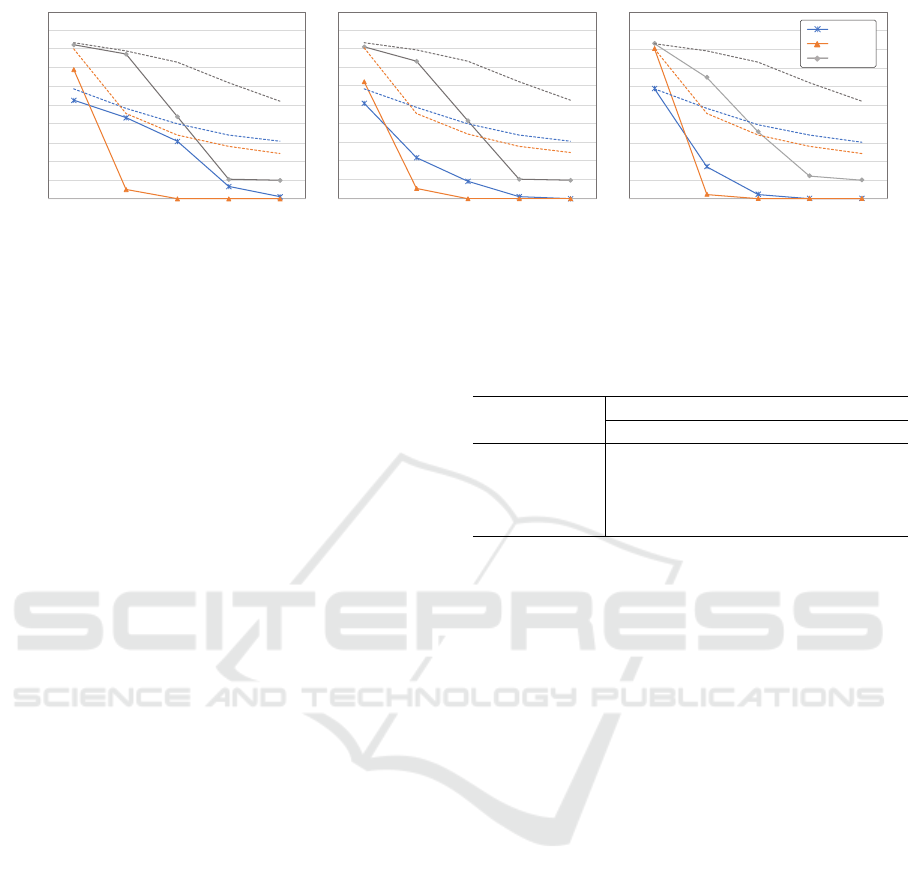
Figure 3: Accuracy transitions for adversarial examples at each ε budget. From left to right graphs are α = {2.0, 4.0,8.0}.
Solid and dashed lines are PGD-10 and FGSM, respectively, and each method is differentiates by color. FGSM accuracy in
all graphs was the same.
of PGD improved by linearly interpolating two par-
tially perturbed images, but others results, such as
clean and FGSM, suffered a decreased performance.
Overall, these results demonstrate that our method is
optimal for improving robustness against adversarial
examples and maintaining the performance for clean
samples.
5.4 Additional Discussion
FGSM vs. PGD for M
2
AT: Between PGD and
FGSM, we found that attacks caused a large gap be-
cause the adversarial examples created by PGD pro-
vide a more powerful threat than FGSM. On the
other hand, our method had only a small gap between
FGSM and PGD (Table 1). To clarify why this is so,
we investigate the accuracy transition when expand-
ing the budget size of the adversarial attack.
Figure 3 shows the accuracy transition for sought
perturbations with different budgets and step sizes
by FGSM and PGD-10. Although AVmixup could
achieve an excellent performance with ε-budget= 8,
its performance dramatically worsened for FGSM and
PGD-10 when it explored perturbation with a wide
budget over ε = 8. This indicates that AVmixup
cannot effectively defend against an adversarial at-
tack when the budget size expands to larger than that
used during training. While PGD did not experi-
ence so severe a collapse, it is still vulnerable to a
large ε-budget, the same as AVmixup. In contrast,
we can maintain a superior performance to the other
defense methods at all budget sizes. Moreover, our
method maintains a sufficient performance up to ε-
budget= 32. Therefore, the model can handle a bud-
get size much larger than the one used during training
if it is trained using our method. According to these
results, AVmixup suffers from an overfit budget size
during training and its generalization performance is
extremely low, while our method generalizes to a dif-
ferent ε-budget. In other words, we believe that the
Table 4: Transfer-based black-box attack results (PGD-20).
The row methods are attack models and the column meth-
ods are defense models.
Defense
model
Attack model
PGD PGD with LS AVmixup
PGD – 50.83 50.86
PGD with LS 54.89 – 54.86
AVmixup 64.86 64.76 –
M
2
AT 80.77 80.62 80.82
model with AVmixup has many peak points outside
the ε-budget.
Black-Box Attack: We examine the robustness
against the transfer-based black-box attack, which at-
tacks the model with perturbations created by other
models. Since the white-box attack is an impossi-
ble situation, the black-box attack needs to be robust
against perturbation created without knowledge of the
parameters of the attack model. As shown in Table 4,
our method achieved the best performance against
perturbations created by any other models (e.g., PGD,
AVmixup). The demonstrate that the model trained
with our method is robust against perturbation created
by model gradients other than itself.
6 CONCLUSIONS
In this paper, we proposed Masking and Mixing Ad-
versarial Training, which can mitigate the trade-off
between accuracy and robustness by masking pertur-
bations with a binary mask and mixing them with an
arbitrary interpolation ratio. Experiments showed that
M
2
AT had a better performance than prior works on
the CIFAR-10 dataset and was robust against a large
ε-budget. While its performance on the CIFAR-100
dataset had the same accuracy as prior works, it could
not achieve state-of-the-art performance. This is be-
cause our adversarial examples were slightly differ-
ent from the original perturbations, which made the
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
80

model classification is unstable when classes were in-
creased. We should be able to improve the perfor-
mance of our method on CIFAR-100 by developing
a better method for creating the ground truth label or
optimizing the training process. In future work, we
will theoretically investigate our method and improve
the training process.
ACKNOWLEDGEMENTS
This work was supported by JST SPRING, Grant
Number JPMJSP2158.
REFERENCES
Brock, A., Donahue, J., and Simonyan, K. (2019). Large
scale gan training for high fidelity natural image syn-
thesis. In the International Conference on Learning
Representations.
Carlini, N. and Wagner, D. (2017). Towards evaluating the
robustness of neural networks. In the IEEE Sympo-
sium on Security and Privacy, volume 1, pages 39–57.
Goodfellow, I., Shlens, J., and Szegedy, C. (2015). Explain-
ing and harnessing adversarial examples. In the Inter-
national Conference on Learning Representations.
Guo, H., Mao, Y., and Zhang, R. (2019). Mixup as locally
linear out-of-manifold regularization. In the AAAI
Conference on Artificial Intelligence, volume 33,
pages 3714–3722.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 770–778.
Lee, S., Lee, H., and Yoon, S. (2020). Adversarial vertex
mixup-toward better adversarially robust generaliza-
tion. In the IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition, pages 272–281.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 3431–3440.
Madry, A., Makelov, A., Schmidt, L., Tsipras, D., and
Vladu, A. (2018). Towards deep learning models re-
sistant to adversarial attacks. In the International Con-
ference on Learning Representations.
Meng, D. and Chen, H. (2017). Magnet: a two-pronged de-
fense against adversarial examples. In the ACM Con-
ference on Computer and Communications Security,
pages 135—147.
Moosavi-Dezfooli, S.-M., Fawzi, A., Fawzi, O., and
Frossard, P. (2017). Universal adversarial perturba-
tions. In the IEEE Conference on Computer Vision
and Pattern Recognition, pages 1765–1773.
Moosavi-Dezfooli, S.-M., Fawzi, A., and Frossard, P.
(2016). Deepfool: a simple and accurate method
to fool deep neural networks. In 2574-2582, editor,
the IEEE Conference on Computer Vision and Pattern
Recognition.
Papernot, N., McDaniel, P., and Goodfellow, I. (2016a).
Transferability in machine learning: from phenomena
to black-box attacks using adversarial samples. arXiv
preprint arXiv:1605.07277.
Papernot, N., McDaniel, P., Wu, X., Jha, S., and Swami, A.
(2016b). Distillation as a defense to adversarial per-
turbations against deep neural networks. In the IEEE
Symposium on Security and Privacy.
Qin, J., Fang, J., Zhang, Q., Liu, W., Wang, X., and Wang,
X. (2020). Resizemix: Mixing data with preserved
object information and true labels. arXiv preprint
arXiv:2012.11101.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In the IEEE Conference on Computer
Vision and Pattern Recognition, pages 779–788.
Samangouei, P., Kabkab, M., and Chellappa, R. (2018).
Defense-gan: Protecting classifiers against adversarial
attacks using generative models. In the International
Conference on Learning Representations.
Schmidt, L., Santurkar, S., Tsipras, D., Talwar, K., and
Madry, A. (2018). Adversarially robust generaliza-
tion requires more data. In the Advances in Neural
Information Processing Systems.
Shafahi, A., Najibi, M., Ghiasi, A., Xu, Z., Dickerson, J.,
Studer, C., Davis, L. S., Taylor, G., and Goldstein, T.
(2019). Adversarial training for free! In the Advances
in Neural Information Processing Systems.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture
for computer vision. In the IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 2818–
2826.
Szegedy, C., Zaremba, W., Sutskever, I., Bruna, J., Erhan,
D., Goodfellow, I., and Fergus, R. (2014). Intrigu-
ing properties of neural networks. In the International
Conference on Learning Representations.
Tram
`
er, F., Kurakin, A., Papernot, N., Goodfellow, I.,
Boneh, D., and McDaniel, P. (2018). Ensemble ad-
versarial training: Attacks and defenses. In the Inter-
national Conference on Learning Representations.
Tsipras, D., Santurkar, S., Engstrom, L., Turner, A., and
Madry, A. (2019). Robustness may be at odds with
accuracy. In the International Conference on Learning
Representations.
Wang, J. and Zhang, H. (2019). Bilateral adversarial train-
ing: Towards fast training of more robust models
against adversarial attacks. In the IEEE/CVF Interna-
tional Conference on Computer Vision, pages 6629–
6638.
Wong, E., Rice, L., and Kolter, J. Z. (2020). Fast is better
than free: Revisiting adversarial training. In the Inter-
national Conference on Learning Representations.
Xie, C., Wang, J., Zhang, Z., Zhou, Y., Xie, L., and Yuille,
A. (2017). Adversarial examples for semantic seg-
mentation and object detection. In the IEEE Interna-
Masking and Mixing Adversarial Training
81

tional Conference on Computer Vision, pages 1369–
1378.
Yamanaka, K., Matsumoto, R., Takahashi, K., and Fujii,
T. (2020). Adversarial patch attacks on monocular
depth estimation networks. IEEE Access, 8:179094–
179104.
Yin, D., Lopes, R. G., Shlens, J., Cubuk, E. D., and Gilmer,
J. (2019). A fourier perspective on model robustness
in computer vision. In the Advances in Neural Infor-
mation Processing Systems.
Yun, S., Han, D., Oh, S. J., Chun, S., Choe, J., and Yoo,
Y. (2019). Cutmix: Regularization strategy to train
strong classifiers with localizable features. In the
IEEE/CVF International Conference on Computer Vi-
sion, pages 6023–6032.
Zagoruyko, S. and Komodakis, N. (2016). Wide residual
networks. arXiv preprint arXiv:1605.07146.
Zhang, H., Cisse, M., Dauphin, Y. N., and Lopez-Paz, D.
(2018). mixup: Beyond empirical risk minimization.
In the International Conference on Learning Repre-
sentations.
Zhang, H. and Wang, J. (2019). Defense against adversar-
ial attacks using feature scattering-based adversarial
training. In the Advances in Neural Information Pro-
cessing Systems, volume 32.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
82
