
Autonomous Energy-Saving Behaviors with Fulfilling Requirements for
Multi-Agent Cooperative Patrolling Problem
Kohei Matsumoto, Keisuke Yoneda and Toshiharu Sugawara
a
Department of Computer Science and Communications Engineering,
Waseda University, Tokyo 1698555, Japan
Keywords:
Multi-Agent Cooperative Patrolling, Coordination, Energy Saving, Self-Assessment.
Abstract:
In this study, we propose a method to autonomously reduce energy consumption in the multi-agent coop-
erative patrol problem (MACPP) while fulfilling quality requirements. While it is crucial for the system to
perform patrolling tasks as feasibly as possible, performing tasks beyond the required quality may consume
unnecessary energy. First, we propose a method to reduce energy consumption by having agents individually
estimate whether a given quality requirement is met through learning and consider energy-saving behaviors
when diligent patrolling behavior is determined to be unnecessary. Second, we propose a method to deactivate
redundant agents based on the values of parameters learned by each agent. Comparison experiments with the
existing methods show that the proposed method can effectively reduce energy consumption while fulfilling
the requirements. We also demonstrate that the proposed method can deactivate some agents for further energy
savings.
1 INTRODUCTION
Recently, robot technology has advanced and has ac-
celerated the use of multiple autonomous robots as a
replacement for tasks that humans repeat daily, such
as patrolling and cleaning, as well as for tasks in haz-
ardous locations, such as disaster-stricken areas, nu-
clear power plants, and outer space. One such prob-
lem in which multiple robots cooperate to perform a
common task is formulated as the multi-agent coop-
erative patrolling problem (MACPP), where robots
are modeled as agents capable of operating au-
tonomously. Studies of MACPP aim to find meth-
ods/algorithms for efficient and effective patrolling in
the given environments through the cooperation and
coordination of multiple agents.
Sophisticated actions and learning that aim to pur-
sue only efficiency may consume more energy than
necessary despite improving patrol efficiency, which
is a crucial issue for MACPP. The autonomous agents
envisioned in this study, in particular, have their
own batteries and will be forced to be frequently
recharged. Meanwhile, some applications have qual-
ity requirements for the patrolling tasks and are not
necessarily expected to exceed them. For example,
a
https://orcid.org/0000-0002-9271-4507
in a cleaning application, it is sufficient if the envi-
ronment is clean to some extent, and excessive pa-
trolling will in fact reduce the effectiveness of the
work per unit of energy. Furthermore, if the environ-
ment is complex and large, it may not be possible to
determine in advance how many agents are needed;
fewer agents cannot fulfill the quality requirements,
whereas too many agents will result in a waste of en-
ergy.
A few studies focused on energy efficiency in the
context of collaborations in multi-agent systems (Kim
et al., 2016; Benkrid et al., 2019; Notomista et al.,
2022). For example, (Benkrid et al., 2019) proposed
a decentralized coordination method that shortens the
motion time to conserve the total motion energy of the
mobile robots in a multi-robot exploration problem.
However, these studies aimed at the methods to effi-
ciently move and work for their tasks, consequently
reducing the total energy consumption. Meanwhile,
our method attempts to realize that some agents will
stop for a while or exit the system by their own deci-
sion if other agents can satisfy the required quality of
tasks. (Wu and Sugawara, 2019; Wu et al., 2019) also
proposed the method for MACPP, with which agents
autonomously pause for energy saving if they can ful-
fill the requirement and return to recharge for future
exploration. However, we found that their method
Matsumoto, K., Yoneda, K. and Sugawara, T.
Autonomous Energy-Saving Behaviors with Fulfilling Requirements for Multi-Agent Cooperative Patrolling Problem.
DOI: 10.5220/0011645000003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 37-47
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
37

was insufficient, and agents still moved around the en-
vironment unnecessarily.
Therefore, we propose a method to both fulfill the
quality requirement and reduce energy consumption
more effectively by extending their method (Wu et al.,
2019), while autonomously foreseeing the possible
contributions by their subsequent actions and under-
standing the overall achievement of the required qual-
ity by estimating the current state of the environment.
The main difference is that because the progress of the
patrolling task while an agent pauses/recharges relies
on the behaviors of other agents and is not the same
for each agent, we introduce independent learning for
the energy-saving behavior from the viewpoint of in-
dividual agents.
We further found that as this learning progresses,
the agents split into two groups: the group of busy
agents that move with short pausing time and the
group of energy-saving agents that pause for rela-
tively long periods of time to not consume energy.
Therefore, the agents in the latter group can stop
their operations sequentially while still satisfying the
quality requirements. Our experiments show that our
method can significantly reduce energy consumption
compared with the previous study. In addition, we
found that the number of busy agent groups varies
with environmental conditions. Subsequently, we
successfully reduced the number of operating agents
by sequentially deactivating agents in the energy-
saving group while fulfilling the quality requirements.
2 RELATED WORK
There have been many studies on MACPP and its ap-
plications (Hattori and Sugawara, 2021; Tevyashov
et al., 2022; Wiandt and Simon, 2018; Othmani-
Guibourg et al., 2017; Zhou et al., 2019). For ex-
ample, (Othmani-Guibourg et al., 2017) proposed a
model of dynamically changing environments based
on the edge Markov evolution graphs. (Zhou
et al., 2019) formulated the patrol problem as a
Bayesian adaptive transition-separating partially ob-
servable Markov decision process and proposed a dis-
tributed online learning and planning algorithm that
extends the Monte Carlo tree search method. In
(Othmani-Guibourg et al., 2018), the authors pro-
posed a method for predicting shared idleness from
individual idleness using artificial neural networks.
However, these studies only consider the efficiency
by ignoring the periodical pauses due to battery dis-
charge and energy consumption. (Yoneda et al., 2013)
proposed a method called adaptive meta-target deci-
sion strategy (AMTDS), in which multiple agents co-
operatively patrol the environment with periodic bat-
tery charge under a planning strategy determined by
Q-learning. However, this study also aimed at only
learning to improve patrolling efficiency without con-
sidering the reduction of energy consumption.
Meanwhile, (Kim et al., 2016; Benkrid et al.,
2019; Notomista et al., 2022; Kim et al., 2016;
Wu et al., 2019; Latif et al., 2021) in part fo-
cused on the energy saving. (Kim et al., 2016) in-
troduced several subrobots besides the firefighting
robots and attempted to extend the total operating
time in firefighting tasks. (Latif et al., 2021) proposed
an energy-conscious distributed task allocation algo-
rithm to solve continuous tasks, such as foraging, for
cooperative swarm robots to achieve highly effective
missions. However, unlike ours, these studies also
consider the extension of operating time. By con-
trast, (Wu et al., 2019) extended AMTDS to save en-
ergy subject to the quality requirements of patrolling.
However, their method is insufficient for energy sav-
ing, and agents’ activities still contain unnecessary
actions. Therefore, we further reduced energy con-
sumption while fulfilling quality requirements by in-
troducing learning from individual viewpoints. More-
over, we also proposed a method to deactivate several
agents for patrolling in order to reduce energy con-
sumption.
3 BACKGROUND AND PROBLEM
FORMULATION
3.1 Environment
Because our method is an extension of the energy sav-
ing method for cleaning applications, adaptive meta-
target decision strategy for energy saving and cleanli-
ness (AMTDS/ESC) proposed by Wu et al. (Wu et al.,
2019), we follow their problem formulation and the
models of the environment and agents’ activities for
MACPP. The environment in which the agents move
around for patrolling is represented by the graph G =
(V, E), which can be embedded in a two-dimensional
Euclidean space, where V = {v
1
,...,v
n
} is the set of
nodes corresponding to the locations that agents visit,
and E is the set of edges e
i, j
connecting nodes v
i
and
v
j
corresponding to the paths along which the agents
move.
We denote the set of n agents by A = {1,...,n}
and introduce discrete time whose unit is step. For
simplicity, all edge lengths are assumed to be 1 by
adding dummy nodes if necessary. Hence, an agent
can move to one of the neighboring nodes with no
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
38

obstacle in a step. Let d(v
i
,v
j
) be the shortest distance
(number of edges) between v
i
and v
j
.
An event occurs at node v ∈ V with its event oc-
currence probability (EOP), 0 ≤ p(v) ≤ 1, and accu-
mulates in v. Thus, the number of events accumulated
in v at time t, L
t
(v), is updated by
L
t
(v) =
L
t−1
(v) +1 (with EPO p(v))
L
t−1
(v) (otherwise)
However, the event in v is processed and L
t
(v) = 0
when an agent visits v at time t. The interpretation
of events differs depending on the applications; for
example, in a cleaning application, p(v) indicates the
tendency to be dirty at location v, and L
t
(v) expresses
the degree of accumulated dirt. In an application for
security surveillance patrol, p(v) indicates the degree
of required security for critical locations specified by
the application owner, and L
t
(v) can be interpreted as
the alert level. We assume that p(v) for all nodes is
specified in advance.
3.2 Agent Model
Agent i ∈ A has a battery whose capacity is described
by B
max
> 0 and can operate continuously by repeat-
edly recharging it at the charging base, B
i
; that is, after
leaving B
i
with a full battery, i patrols the environment
and returns to B
i
before it runs out. We assume that
the current battery capacity b
i
(t) at t is decremented,
i.e., b
i
(t) ← b
i
(t − 1) − 1 when i moves to a neigh-
boring node. b
i
≤ 0 signifies the battery runout. By
introducing the charging speed constant k
charge
> 0, it
takes (B
max
− b
i
) · k
charge
steps to make its battery full
(so b
i
= B
max
).
Agent i knows p(v) of all nodes v but cannot know
the current number of the accumulated events L
t
(v) if
i is not on v. Therefore, the agents calculate the ex-
pected value E
i
(L
t
(v)) from p(v) at time t. For this
calculation, we assumed that agents can know their
own and other agents’ locations. This can be achieved
easily by current technology; for example, using sen-
sors such as infrared rays or GPS, by direct commu-
nication between agents, or by cloud robotics, i.e., by
sharing information via a cloud. However, agents do
not share and infer their internal information and deci-
sions, such as strategies to set the destinations and the
planned routes to those destinations. We did not con-
sider collisions between agents because this study fo-
cuses on learning energy-saving actions while meet-
ing the required quality, and we believe that it is easy
to generate detour routes to avoid collisions in the
grid-like environment used in our experiments. In ad-
dition, several algorithms that generate collision-free
routes were proposed (e.g., (Yamauchi et al., 2022;
Ma et al., 2017)), and we can use one of these algo-
rithms for collision avoidance.
3.3 Target Decision Strategy
We describe the agents’ behaviors used in
AMTDS/ESC (Wu et al., 2019). When an agent
explores the environment further after reaching its
previous goal or after its battery is full, it determines
the next target node v
i
tar
∈ V and then moves along the
shortest path towards it.
1
Agent i selects the strategy
that i learned as the best for the target decision by
Q-learning from the following four strategies.
Random Selection (R): Agent i randomly selects
v
i
tar
∈ V from the environment.
Probabilistic Greedy Selection (PGS): Agent i ran-
domly selects v
i
tar
from the top N
g
nodes of
E
i
(L
t
(v)).
Prioritizing Unvisited Interval (PI): Agent i ran-
domly selects v
i
tar
∈ V from the top N
i
nodes with
large intervals between the most recently visited
time and the current time.
Balanced Neighbor-Preferential Selection (BNPS):
Agent i examines E
i
(L
t
(v)) in the neighbors and
prioritizes v
i
tar
if it is higher than the threshold;
otherwise it uses the PGS.
For more details, please refer to the original (Yoneda
et al., 2013; Wu et al., 2019).
3.4 Metrics for Task Quality from
Subjective Viewpoint
We introduce two evaluation measures: the time left
without checking events D
t
s
,t
e
, and the total energy
consumption C
t
s
,t
e
, as follows:
D
t
s
,t
e
=
∑
v∈V
t
e
∑
t=t
s
+1
L
t
(v), and (1)
C
t
s
,t
e
=
∑
i∈A
t
e
∑
t=t
s
+1
E
t
(i), (2)
where [t
s
,t
e
] (t
s
< t
e
) denotes a time interval, and E
t
(i)
represents the energy consumed by agent i at t; there-
fore, E
t
(i) = 1 if i moved to a neighboring node and
E
t
(i) = 0 otherwise. For example, D
t
s
,t
e
represents the
cumulative time of dust left without being vacuumed
in a cleaning application and the cumulative time and
1
More precisely, it will drop in at any node near the
shortest path that has a large value of E
i
(L
t
(v)), using the
subgoal determination algorithm (Yoneda et al., 2013).
Autonomous Energy-Saving Behaviors with Fulfilling Requirements for Multi-Agent Cooperative Patrolling Problem
39
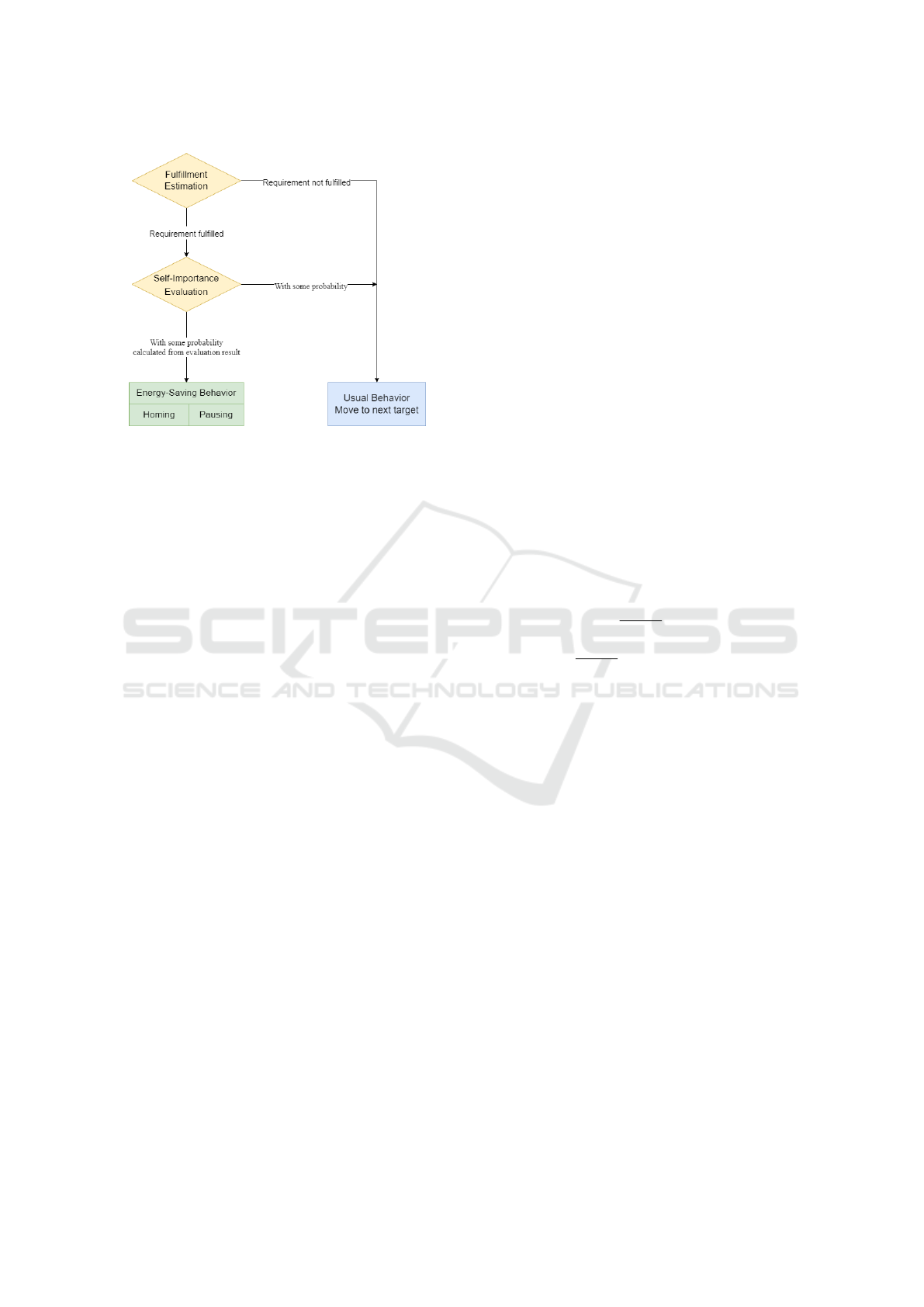
Figure 1: Flow for energy-saving behavior.
the number of secure locations left unchecked in secu-
rity patrols. Therefore, agents cooperatively maintain
D
t
s
,t
e
less than the required value D
req
≥ 0 per step,
D
t
s
,t
e
≤ D
req
× (t
e
−t
s
) (3)
Our aim is to keep C
t
s
,t
e
as low as possible while satis-
fying the quality requirement Formula (3). Note that
D(s) and C(s) are used instead of D
t
s
,t
e
and C
t
s
,t
e
, by
omitting the subscripts unless confused.
4 PROPOSED METHOD
4.1 Estimating Quality Requirement
Fulfillment
We explain the proposed method by describing how it
differs from the energy-saving behavior in the previ-
ous study (Wu et al., 2019). Figure 1 shows the flow
of the behaviors involved in the energy-saving behav-
ior of agents. Agents need to understand the cur-
rent state of the environment and compare it with the
required task quality to reduce energy consumption.
However, any agent cannot get the actual state and
must estimate it. In the fulfilling estimation, agents
regularly check if the required quality is accom-
plished while learning how they can predict the fu-
ture environmental state from individual viewpoints,
although in the previous method (Wu et al., 2019), all
agents estimate it in a uniformed viewpoint.
For this, agent i computes the expected value
E
i
(L
t
c
+T
(v)) for ∀v ∈ V at a future time t
c
+ T using
E
i
(L
t
c
+T
(v)) = p(v) × {(t
c
+ T ) −t
v
vis
} (4)
where t
c
denotes the current time, T > 0 represents
the parameter to specify how far into the future i esti-
mates, and t
v
vis
indicates the most recent time when an
agent visited v. Then, i should check if
∑
v∈V
E
i
(L
t
c
+T
(v)) ≤ D
req
(5)
is satisfied. Note that agent i estimates the future state
here to foresee the impact of its energy-saving behav-
ior, while i stops patrolling for some time.
However, this estimation by Formula (4) is an
ideal case based on the uniformed workload and ig-
nores the efforts of other agents. In particular, other
agents maintain the required quality D
req
even if the
agent stops for energy saving or charging. Such ef-
forts of other agents are obviously different depending
on the individual viewpoints because agents visit dif-
ferent locations with different characteristics. There-
fore, agents have to learn the possible efforts of other
agents during the energy-saving behavior.
We introduce the learning parameter K
i
for ∀i ∈ A
to adjust such differences. Then, agent i evaluates the
environment using the following Formula (6), instead
of Formula (5).
∑
v∈V
E
i
(L
t
c
+T
(v)) ÷K
i
≤ D
req
(6)
Moreover, K
i
is individually updated by
K
i
← (1 − α)K
i
+ α
D
req
E
i
(D
t
)
K
i
(if E
i
(D
t
) ≤ D
req
)
K
i
← K
i
−
E
i
(D
t
)
D
req
− 1
(if E
i
(D
t
) > D
req
)
(7)
where the estimated number of events at t is defined
as E
i
(D
t
) =
∑
v∈V
E
i
(L
t
(v)), and α > 0 is the learning
rate. When K
i
is updated is explained in Section 4.3.2.
4.2 Self-Assessment for Energy-Saving
Behaviors
Agent i regularly checks Formula (6), and if it is
satisfied, i evaluates its contribution toward fulfilling
the quality requirement and foresees the impact of its
energy-saving behavior on the future state of the envi-
ronment (Fig. 1). For this purpose, we introduce the
self-assessment value of agent i at t, S
ass
i
(t), which
represents the degree of its recent contribution to de-
termine if i should continue to patrol for the cooper-
ative task or stop patrolling by adopting an energy-
saving behavior.
To calculate S
ass
i
(t
c
), we define three parameters
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
40

for ∀i ∈ A, as follows:
U
i
s
(t
c
) =
∑
t
c
−T
s
<t≤t
c
L
t
(v
i
(t))
T
s
(8)
U
i
l
(t
c
) =
∑
t
c
−T
l
<t≤t
c
L
t
(v
i
(t))
T
l
(9)
U
i
f
(t
c
) =
∑
t
c
<t≤t
c
+T
f
E
i
(L
t
(v
i
(t)))
T
f
, (10)
where T
s
and T
l
(where 0 < T
s
< T
l
) denote the past
short- and long-term evaluation periods for the past,
T
f
(> 0) indicates the evaluation period for the future,
and v
i
(t) represents the node where i was or will be at
t. Intuitively, the short-term past contribution U
i
s
(t
c
)
and the long-term past contribution U
i
l
represent the
numbers of events processed by i in the past, whereas
the estimated contribution U
i
f
(t
c
) estimates the num-
ber of events that will be processed by i in the future
until t
c
+T
f
. Note that the expected value E
i
(L
t
(v)) is
used instead of L
t
(v) only in Formula (10).
Now, we define the self-assessment value S
ass
i
(t)
(0 ≤ S
ass
i
(t) ≤ 1) using
S
ass
i
(t) =
0 (if U
i
l
= 0)
U
i
s
+U
i
f
U
i
l
(else if U
i
s
+U
i
f
≤ U
i
l
)
1 (otherwise)
(11)
Then, i chooses an energy-saving behavior at the
probability of P
i
(t) computed using equation (12).
P
i
(t) = 1 − S
ass
i
(t) (12)
Therefore, a low self-assessment value facilitates the
agent’s energy-saving behavior.
4.3 Energy Saving Behaviors
Agents take one of two energy-saving behaviors:
Homing or Pausing, to eliminate movements that they
deem unnecessary.
Homing: Agent stops patrolling and returns to the
charging base regardless of the remaining battery
level.
Pausing: After charging is complete, the agent waits
for S
pause
steps without starting to move, where
S
pause
is a positive integer.
We will explain when the agents adopt these behav-
iors.
4.3.1 Homing Behavior
Agent i checks the requirement fulfillment (For-
mula (6)) every T
homing
steps after its battery level
becomes low, i.e., b
i
(t) < k
homing
· B
max
, where pos-
itive integer T
homing
is the parameter that avoids the
frequent return to charge by homing, and k
homing
(0 <
k
homing
< 1) is the parameter that decides low battery
level. If Formula (6) does not hold, i continues to
patrol; otherwise, with probability P
i
(t), i follows a
homing behavior in which i changes the current target
to its charging base B
i
. Note that agents patrolling far
from B
i
may return to base before this check.
Algorithm 1: PLength: To decide pausing time-length.
Require: S
pause
> 0, γ
p
= 0, T
γ
p
> 0
1: while γ
p
≤ T
γ
p
do
2: T ← (γ
p
+1)· S
pause
// T is used in Formula (6)
3: if Formula (6) holds then
4: γ
p
← γ
p
+ 1
5: else
6: break
7: end if
8: end while
9: // Agent takes a pausing behavior whose pausing
10: // time is γ
p
· S
pause
. If γ
p
= 0, agent immediately
11: // leaves for patrolling.
12: return γ
p
· S
pause
.
4.3.2 Variable-Length Pausing Behavior
In the previous method (Wu et al., 2019), when the
battery is fully charged at time t, agent i checks the
condition of the requirement (Formula (5)), and if the
condition is fulfilled, i takes the pausing behavior with
a constant pausing time S
pause
steps.
Meanwhile, in our proposed method, agents take
variable pausing time depending on the condition of
the estimated states. i takes the following variable-
length pausing behavior with probability P
i
(t) it com-
pletes charging at t. However, as an exception, i al-
ways takes the variable-length pausing behavior only
when it returns to the charging base B
i
by homing be-
havior.
First, in the variable-length pausing behavior, i de-
termines the pausing time as follows (see PLenght
in Algorithm 1). Initially, agent i set γ
p
= 0 and
T = S
pause
. When the battery is fully charged at time
t, agent i checks the requirement fulfillment (For-
mula (6)), and if it does not hold, i immediately leaves
the charging base for patrolling, i.e., the pausing time
is zero. If it holds, i increments γ
p
by 1 and sets
T ← (γ
p
+ 1) · S
pause
. Then, i checks the fulfillment
Formula (6) again; i repeats this process until i can
decide the length of the pausing time or γ
p
= T
γ
p
,
where T
γ
p
is the maximal value of this iteration. Sub-
sequently, i takes the pausing behavior whose length
Autonomous Energy-Saving Behaviors with Fulfilling Requirements for Multi-Agent Cooperative Patrolling Problem
41
is γ
p
·S
pause
. Agents always leave their charging bases
after the variable-length pausing behavior.
Unlike the previous method, agent i always takes
the variable-length pausing behavior after a full
charge if i returns to the charging base by a homing
behavior, as mentioned previously. This exception
can be explained by the fact that only homing behav-
ior has a marginal impact on energy saving because a
homing behavior shortens the current patrolling time
and reduces the time required for a full charge. Thus,
we believe that it is natural to always call a variable-
length pausing behavior to decrease energy consump-
tion. Certainly, it is possible that the pausing time is
zero by PLength, even in such a case. Hereafter, a
variable-length pausing behavior is simply referred to
as a pausing behavior.
Parameter K
i
for ∀i ∈ A is updated by Formula (7)
after i completes a pausing behavior even if the return
value of PLength is zero, because PLength carefully
estimates the current state to obtain the maximum du-
ration that each agent can wait up to while fulfilling
its quality requirements.
4.4 Deactivation of Unnecessary Agents
From the perspective of energy saving, if the num-
ber of agents needed for patrolling is sufficient, even
excessive, it is effective not only to temporarily stop
agents but also to deactivate the patrolling of some
agents. Furthermore, these ceased agents can be used
elsewhere or as backups in case of agent failure. How-
ever, we cannot know in advance which agents should
be deactivated and determine how many agents are
needed to meet the required quality in the environ-
ment, which is complex and whose distribution of
POE is not uniform.
As we explain the data in detail in Section 5.3, we
found large variations in the value of K
i
among agents
and that they were divided into two main clusters. In
particular, because the agents belonging to the cluster
with relatively larger values of K
i
took pausing behav-
iors for a relatively longer duration to reduce energy
consumption, we propose to deactivate agent i
de
∈ A
that has the largest value of K
i
, i.e.,
i
de
= arg max
i∈A
K
i
(13)
Subsequently, if some agents still have a large value
of K
i
, the same deactivation process is repeated until
all agents have relatively smaller K
i
while the require-
ment is fulfilled.
Therefore, in every D
int
> 0 steps, the system
counts x
pause
, which is the number of times the func-
tion PLength has been called by all agents, and if
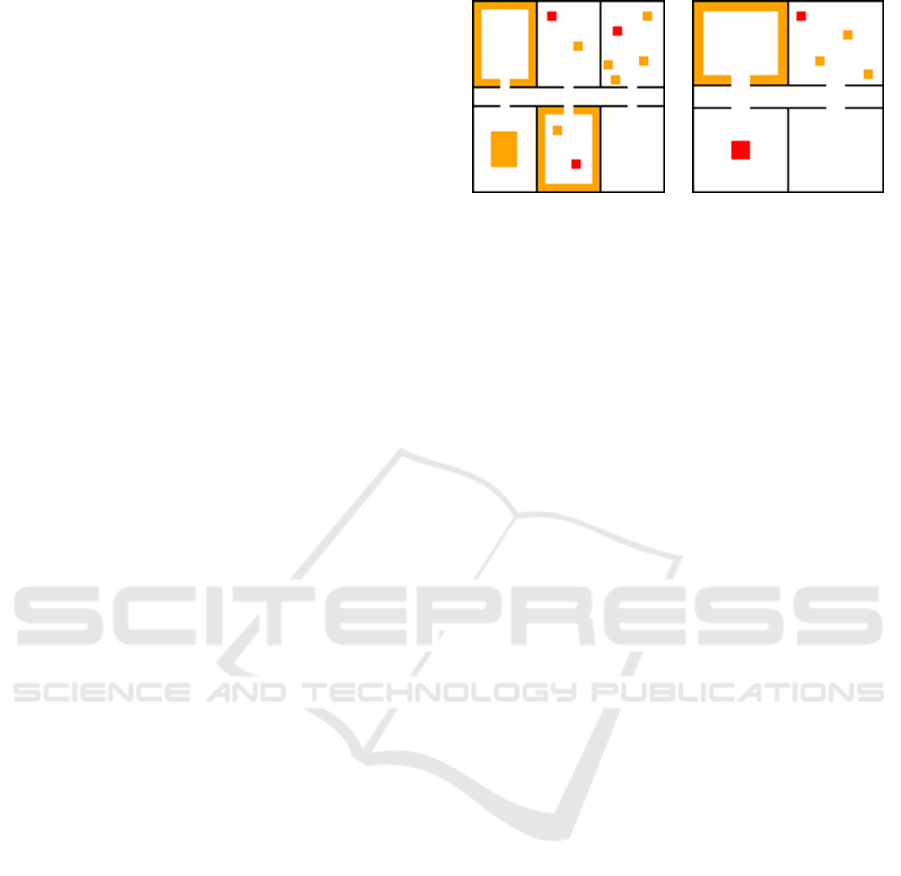
(a) Environment 1.
(b) Environment 2.
Figure 2: Experimental environments.
x
pause
and K
i
de
are large, i.e.,
x
pause
≥ N
deact
and max
i∈A
K
i
≥ K
deact
, (14)
then, i
de
is deactivated. Herein, K
deact
> 0 denotes the
threshold value for deactivation, and N
deact
indicates
the threshold to decide if several pausing behaviors
are attempted during the recent D
int
from the system’s
viewpoint.
5 EXPERIMENTS AND
DISCUSSION
5.1 Experimental Setting
We conducted experiments to compare the proposed
method AMTDS/ER with the conventional method
AMTDS(Yoneda et al., 2013) to verify the effec-
tiveness of the proposed method, in which agents
do not perform energy-saving behaviors, and that of
AMTDS/ESC(Wu et al., 2019), in which the agents
take homing and pausing behaviors but do not learn
the parameter that decides when agents should take
energy-saving behaviors. We demonstrate that the
proposed method is more effective than other meth-
ods in that the agents can reduce energy consumption
while fulfilling the quality requirement by investigat-
ing evaluation metrics D(s) and C(s). We analyzed
the distribution of the values of K
i
for ∀i ∈ A, and
agents were divided into two groups in accordance
with these values. Finally, we examined if our deacti-
vation method could reduce the number of patrolling
agents while fulfilling the quality requirement. We
list the parameter values used in our experiments in
Table 1. Note that the value of T in Formula (6) is
defined in Algorithm 1.
We prepared two environments that have a two-
dimensional grid structure with a size of 101×101, as
shown in Fig. 2. The environment G
1
= (V
1
,E
1
) for
the first experiment (Exp. 1) is the same as the envi-
ronment used for the experiment in (Wu et al., 2019),
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
42
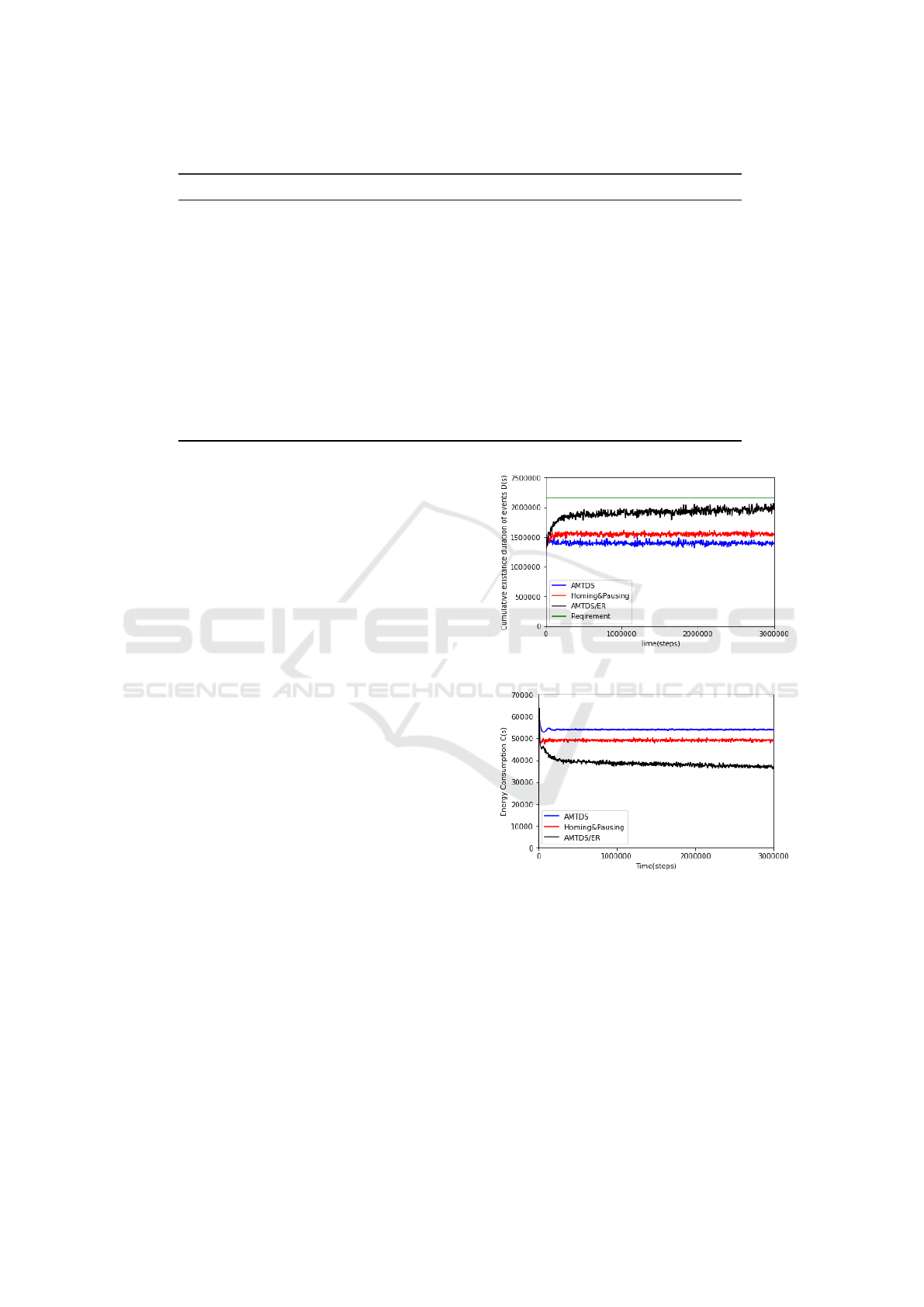
Table 1: List of parameter description.
Description Symbol Value
Maximal battery capacity B
max
900
Charging speed constant k
charge
3
Past short-term evaluation period T
s
20
Past long-term evaluation period T
l
50
Future evaluation period for self-assessment T
f
10
Learning rate for parameter K
i
α 0.1
Check point time for a homing behavior T
homing
100
Check point for remaining battery capacity for a homing behavior k
homing
1/3
Length of a pausing behavior S
pause
100
Interval to check deactivation D
int
250,000
Threshold for too many system-wide pause operations T
γ
p
1,000
Parameter for deciding additional deactivation N
deact
100
Threshold for deactivation K
deact
1.0
for comparison (Fig. 2a). This environment has six
separate rooms and a corridor connecting these rooms
in the center. The black lines represent walls (obsta-
cles that agents cannot pass through). Each node v ∈
V
1
is represented by a coordinate of integers (x
v
,y
v
),
where −50 ≤ x
v
,y
v
≤ 50. The EOP p(v) for node
∀v ∈ V
1
was set according to colors in Fig. 2, as fol-
lows.
p(v) =
10
−3
(if v is in a red region)
10
−4
(if v is in an orange region)
10
−6
(if v is in a white region)
(15)
Therefore, the deeper the color, the higher the EOP.
In the second experiment (Exp. 2), the environ-
ment has four rooms, but the size of each room was
slightly wider (Fig. 2b). The EOPs are also specified
by Formula (15) using color as in Exp. 1. The sec-
ond environment looks simpler, and the total number
of events occurring there is smaller. However, this
necessitates more energy-saving behaviors by agents.
The number of agents |A| is 20, and the charg-
ing bases for all agents are placed at the center (0, 0).
Agents leave the charging bases with full batteries,
patrol the environment, return to the charging bases
before the batteries are dead, and repeat this cycle of
activities. We set the battery capacity to B
max
= 900,
and the charging speed constant k
charge
= 3. Thus, it
takes 2700 steps for the battery to fully charge from 0.
Therefore, the maximum activity cycle time is 3600
steps; hence, we set the data collection interval t
e
−t
s
for calculating D(s) and C(s) to 3600. We also set
the quality requirement value to D
req
= 600, and the
initial value of the parameter K
i
is 1.0. The values of
D(s) and C(s) shown below were the average values
of 50 independent trials.
Figure 3: C(S) over time in Exp. 1.
Figure 4: D(S) over time in Exp. 1.
5.2 Performance Evaluation
Figures 4 and 4 present a plot of the transition of
time left without checking events D(s), and total
energy consumption C(s) every 3600 steps, respec-
tively. Note that as D
req
= 600, agents are required
to keep D(s) ≤ 2160000 (= 3600D
req
) in Fig. 4. Fig-
ure 4 shows that all methods fulfilled the quality re-
quirement. In particular, the conventional methods,
AMTDS and AMTDS/ESC, maintained the D(s) to
considerably smaller values than the required value.
Autonomous Energy-Saving Behaviors with Fulfilling Requirements for Multi-Agent Cooperative Patrolling Problem
43
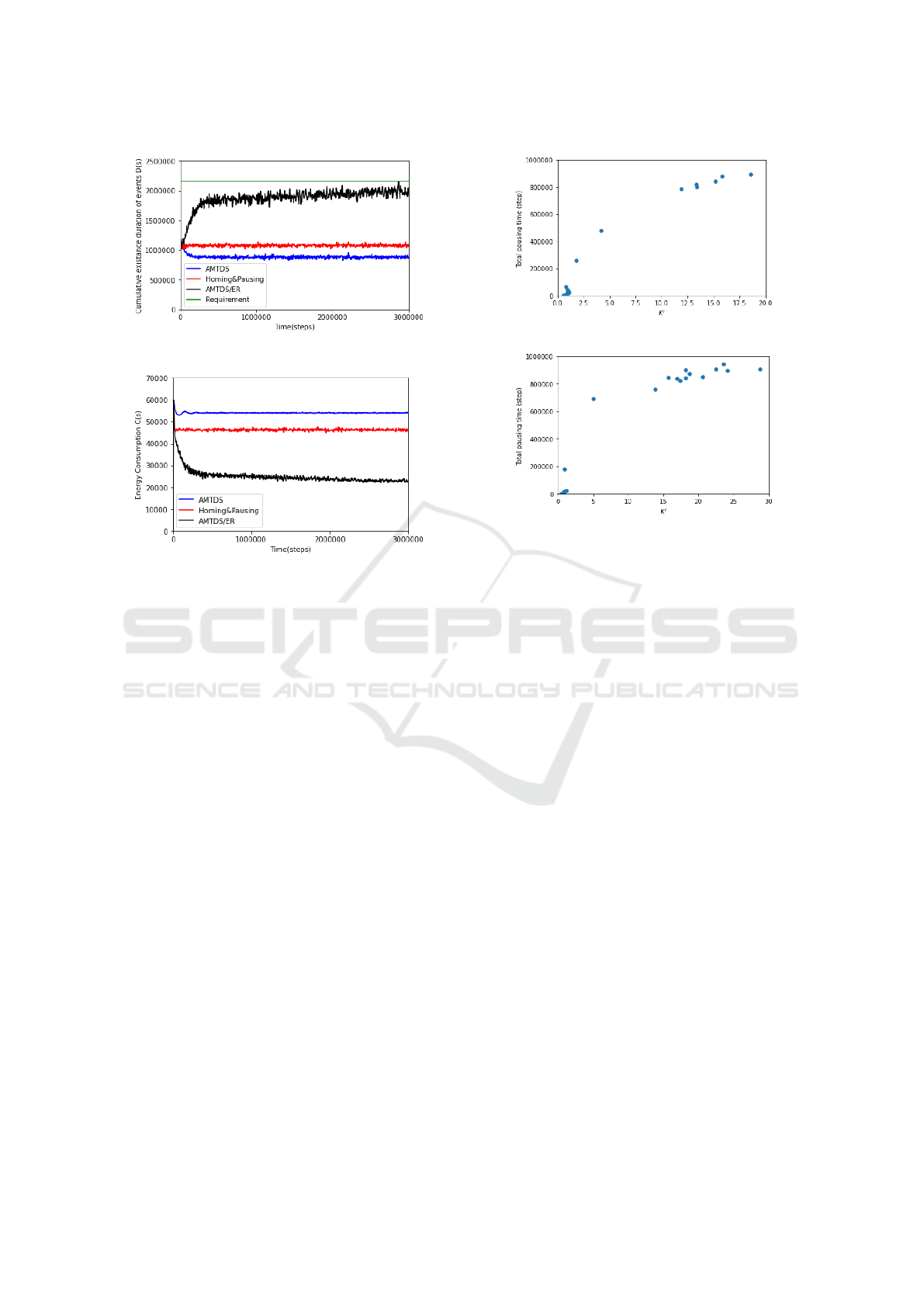
Figure 5: C(S) over time in Exp. 2.
Figure 6: D(S) over time in Exp. 2.
However, this suggested excessive energy con-
sumption by patrolling beyond the requirements, and
this situation is illustrated in Fig. 4. This figure indi-
cates that the proposed method AMTDS/ER could re-
duce total energy consumption C(s) by approximately
30.9% compared to AMTDS, although AMTDS/ER
increased the value of D(s) approximately by 40.3%,
where these data are the average values between
2,000,000 and 3,000,000. AMTDS/ESC could also
reduce energy consumption, but the reduction was
limited; AMTDS/ER could reduce C(s) approxi-
mately by 24.0% compared to AMTDS/ESC and in-
crease D(s) approximately by 26.2%. The increase
in effective reduction can be attributed to the intro-
duction of learning parameters K
i
because it enabled
each agent to predict the effect of other agents’ con-
tribution during its stops for energy-saving behaviors
to some extent.
Similar results can be observed in Exp. 2, as
shown in Figs. 6 and 6, which present plots of D(s)
and C(s) over time in Environment 2. In this envi-
ronment, the sum of the EOP values is much lower
than that in Environment 1, and we should confirm if
agents could take more energy-saving behaviors to re-
duce more energy than that in Exp. 1. Agents could
achieve such expected behaviors; Fig. 6 shows that
agents gradually increased the energy-saving behav-
iors by fulfilling the requirement while they decreased
the consumed energy, as shown in Fig. 6. Thus, agents
Figure 7: Parameter K
i
and total pausing time (Exp. 1).
Figure 8: Parameter K
i
and total pausing time (Exp. 2).
with AMTDS/ER consumed energy that was almost
half of that consumed by agents with AMTDS/ESC.
5.3 Analysis of Behavior
We analyzed the characteristics of agents’ energy-
saving behaviors, particularly the sum of pausing
times, which is partly affected by the value of the
learning parameter K
i
in each agent. We calcu-
lated the sum of pausing times from 2,000,000 to
3,000,000 steps for ∀i ∈ A and plotted the relation-
ship between this sum and K
i
at 3,000,000 step in
Figs. 7 (Exp. 1) and 8 (Exp. 2). Note that these scat-
tered graphs were plotted using data obtained in one
experimental trial randomly selected from Exp. 1 and
Exp. 2, with no special intent.
Both of these graphs suggest that the agents can
be divided into roughly two clusters; one with rela-
tively large values of K
i
(e.g., K
i
≥ 10) and a large
sum of pausing times, and another one with small
values of K
i
(e.g., K
i
≤ 3) and a relatively small
sum of pausing times. We called the former cluster
the energy-saving group while the latter is called the
busy group. The findings of this analysis are as fol-
lows. First, because the length between 2,000, 000
and 3,000, 000 is 1,000,000, agents in the energy-
saving group that paused more than 800,000 times
rarely patrolled the environment. The non-pausing
time was less than 200,000, but the charging speed
constant k
charge
= 3. Thus, their actual patrolling time
was less than 50,000.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
44
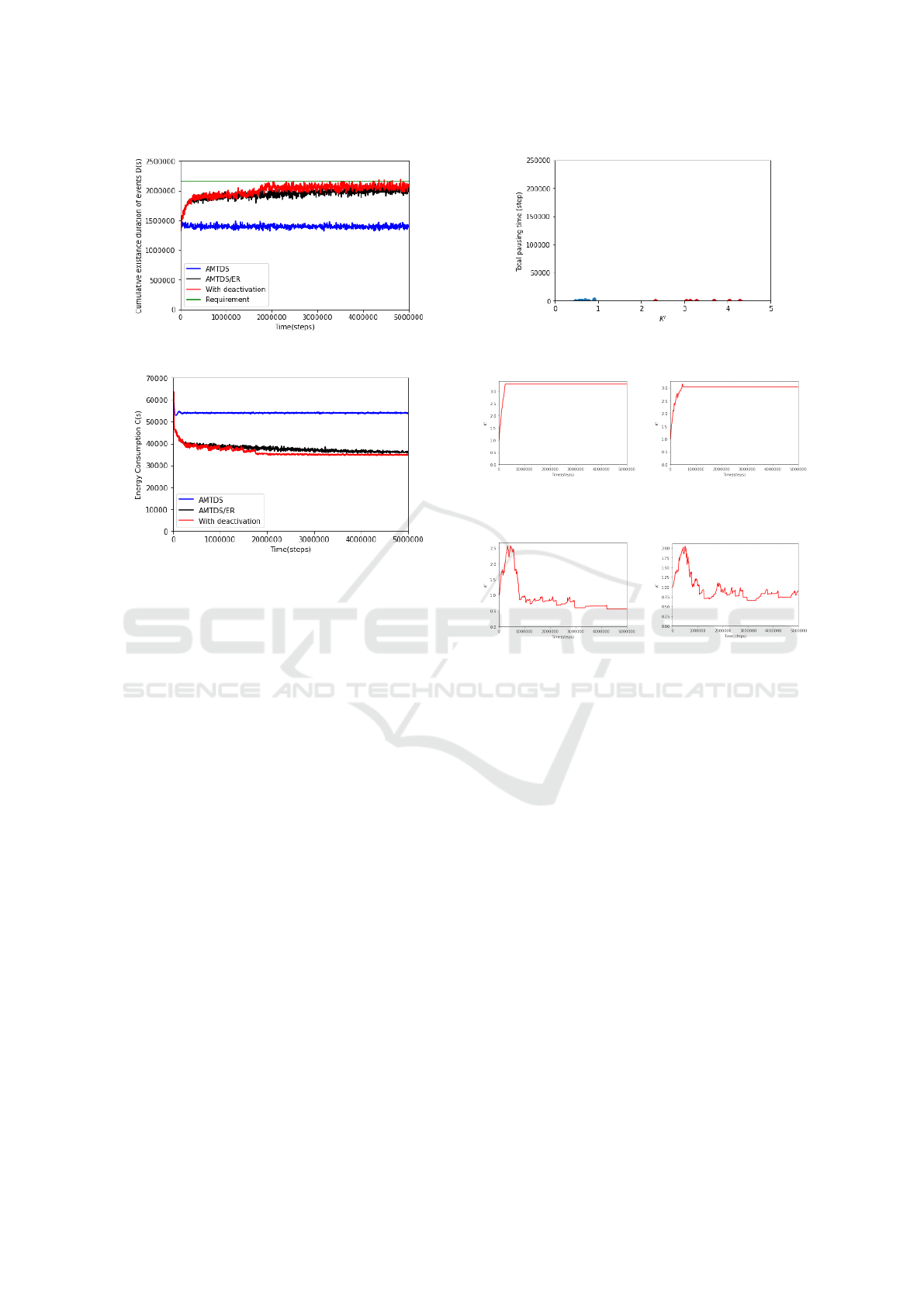
Figure 9: C(S) over time in Exp. 3.
Figure 10: D(S) over time in Exp. 3.
Meanwhile, most agents in the busy group rarely
took the pausing behaviors. Note that homing behav-
ior is only returning to the charging base regardless of
the remaining capacity, shortening its time for charg-
ing. Therefore, the homing behaviors did not directly
contribute to the energy savings. The agents in the
busy group performed most of the required patrol to
fulfill the requirement, whereas the remaining agents
in the energy-saving group increased their pausing
time, and this type of differentiation occurred through
individual learning.
5.4 Evaluation of Deactivation
We have already described the deactivation method
in Section 4.4 based on the analysis in the previous
section. We conducted the third experiment (Exp. 3)
under the same setting as Exp. 1 to evaluate the pro-
posed deactivation method, i.e., to determine whether
the number of agents patrolling can be reduced to re-
duce the energy consumption while fulfilling the qual-
ity requirement. As listed in Table 1, we checked the
possibility of deactivation every D
int
= 250,000.
Figures 10 and 10 show the transition of D(s) and
C(s), respectively, until 5, 000, 000 steps, where label
“With deactivation” indicates the AMTDS/ER with
the proposed deactivation method. In this particular
experiment, the number of deactivated agents ranged
between six and eight, mostly seven. Note again that
Figure 11: Parameter K
i
and total pausing time (Exp. 3).
(a) D = 250, 000 steps. (b) D = 500, 000 steps.
Figure 12: Value of K
i
in agents not deactivated.
(a) Example 1.
(b) Example 2.
Figure 13: Value of K
i
in the agents deactivated at D steps.
smaller values of D(s) and C(s) are better.
Figure 10 indicates that the proposed AMTDS/ER
with the deactivation method could raise D(s) more
while fulfilling the quality requirement compared to
AMTDS/ER without deactivation, although their dif-
ference was small. This is because AMTDS/ER al-
ready maintained the value of D(s) near the required
quality level. The consumed energy was also slightly
reduced, as shown in Fig. 10. However, the main dif-
ference between with and without deactivation sce-
narios is that agents that were deactivated could com-
pletely transfer their patrolling tasks to other agents.
Furthermore, we would like to emphasize that even
though the performance differences in D(s) and C(s)
are not large, the advantages of deactivation are that
we can (1) use the deactivated agents in other envi-
ronments, (2) leave those agents on standby and use
them in case of failure, or (3) implement periodic in-
spections and alternating operations to extend the life
of the system.
Autonomous Energy-Saving Behaviors with Fulfilling Requirements for Multi-Agent Cooperative Patrolling Problem
45

5.5 Behaviors of Active and Deactivated
Agents
We analyzed the behaviors of active and deactivated
agents by investigating the transition of K
i
. We plot-
ted, in Fig. 11, the relationship between K
i
and the
total pausing time of i in one independent trial that
was randomly selected from Exp. 3, where K
i
is the
value at 5,000,000 steps, and the total pausing time is
the sum of the pause times during the last 1,000,000
steps of the experiment. Therefore, K
i
of a deacti-
vated agent i was the value when it was deactivated,
and the total pausing time of i must be zero. Seven red
plots correspond to deactivated agents. This figure in-
dicates that deactivated agents had relatively high val-
ues of K
i
and active agents continued patrolling with
a very short pausing time. This implies that thirteen
agents were sufficient to maintain the required quality
set in this experiment.
Figures 13 and 13 present plots of the transition
of K
i
for agents that were deactivated at 250,000 and
500,000 steps (Fig. 13) and active agents (Fig. 13).
We can see from Fig. 13 that the K
i
values of these
agents rapidly increased and were then selected for
deactivation because the sum of its pausing time was
the largest at that time. Subsequently, their K
i
did
not change. Meanwhile, active agents temporally in-
creased their values of K
i
, but after that, the K
i
de-
creased and kept the relatively lower values because
some agents were deactivated. Thus, the active agents
must patrol more in their stead to fulfill the require-
ment.
Our experimental results show that the proposed
method can reduce energy consumption more than the
previous method (Wu et al., 2019) by introducing the
individual learning parameter K
i
. We further reduced
the number of operating agents based on the value of
K
i
while fulfilling the quality requirements.
6 CONCLUSIONS
Although conventional studies for MACPP usually
consider maximizing efficiency, it is often desirable
to reduce the energy used while fulfilling the qual-
ity requirement. Therefore, we proposed a method
that can save energy while meeting the requirement
in MACPP. The basic idea of our method is that each
agent individually foresees the state of the environ-
ment and assesses its own behavior from individual
viewpoints. Then, it returns to the charging base
or pauses for a while to save energy on determin-
ing that it is not necessary to start patrolling immedi-
ately. Moreover, we found that the proposed individ-
ual learning clusters the agents into two groups, and
by using these findings, we could successfully deacti-
vate redundant agents to reduce the number of work-
ing agents required for the current requirement.
This study assumed that the event probability
(EOP) p(v) in the environment is known, but this is
not always possible. Therefore, our future work is
to propose a method to reduce energy consumption
while agents learn the EOP in the environment.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI Grant
Number 20H04245.
REFERENCES
Benkrid, A., Benallegue, A., and Achour, N. (2019). Multi-
robot coordination for energy-efficient exploration.
Journal of Control, Automation and Electrical Sys-
tems, 30(6):911–920.
Hattori, K. and Sugawara, T. (2021). Effective Area Parti-
tioning in a Multi-Agent Patrolling Domain for Bet-
ter Efficiency. In Proceedings of the 13th Inter-
national Conference on Agents and Artificial Intel-
ligence - Volume 1: ICAART,, pages 281–288. IN-
STICC, SciTePress.
Kim, J., Dietz, J. E., and Matson, E. T. (2016). Modeling of
a multi-robot energy saving system to increase oper-
ating time of a firefighting robot. In 2016 IEEE Symp.
on Technologies for Homeland Security (HST), pages
1–6.
Latif, E., Gui, Y., Munir, A., and Parasuraman, R. (2021).
Energy-aware multi-robot task allocation in persistent
tasks.
Ma, H., Li, J., Kumar, T. S., and Koenig, S. (2017). Life-
long multi-agent path finding for online pickup and
delivery tasks. In Proc. of the 16th Conference on Au-
tonomous Agents and MultiAgent Systems, AAMAS
’17, pages 837–845, Richland, SC. IFAAMAS.
Notomista, G., Mayya, S., Emam, Y., Kroninger, C., Bo-
hannon, A., Hutchinson, S., and Egerstedt, M. (2022).
A resilient and energy-aware task allocation frame-
work for heterogeneous multirobot systems. IEEE
Transactions on Robotics, 38(1):159–179.
Othmani-Guibourg, M., El Fallah-Seghrouchni, A., Farges,
J.-L., and Potop-Butucaru, M. (2017). Multi-agent pa-
trolling in dynamic environments. In 2017 IEEE In-
ternational Conference on Agents (ICA), pages 72–77.
IEEE.
Othmani-Guibourg, M., Fallah-Seghrouchni, A. E., and
Farges, J.-L. (2018). Decentralized multi-agent pa-
trolling strategies using global idleness estimation. In
International Conference on Principles and Practice
of Multi-Agent Systems, pages 603–611. Springer.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
46

Tevyashov, G. K., Mamchenko, M. V., Migachev, A. N.,
Galin, R. R., Kulagin, K. A., Trefilov, P. M., Onisi-
mov, R. O., and Goloburdin, N. V. (2022). Algorithm
for multi-drone path planning and coverage of agricul-
tural fields. In Agriculture Digitalization and Organic
Production, pages 299–310. Springer.
Wiandt, B. and Simon, V. (2018). Autonomous graph par-
titioning for multi-agent patrolling problems. In 2018
Federated Conference on Computer Science and In-
formation Systems (FedCSIS), pages 261–268. IEEE.
Wu, L. and Sugawara, T. (2019). Strategies for Energy-
Aware Multi-agent Continuous Cooperative Patrolling
Problems Subject to Requirements. In PRIMA 2019:
Principles and Practice of Multi-Agent Systems, pages
585–593, Cham. Springer International Publishing.
Wu, L., Sugiyama, A., and Sugawara, T. (2019). Energy-
efficient strategies for multi-agent continuous coop-
erative patrolling problems. Procedia Computer Sci-
ence, 159:465–474.
Yamauchi, T., Miyashita, Y., and Sugawara, T. (2022).
Standby-Based Deadlock Avoidance Method for
Multi-Agent Pickup and Delivery Tasks. In Pro-
ceedings of the 21st International Conference on
Autonomous Agents and Multiagent Systems, pages
1427–1435, Richland, SC. IFAAMAS.
Yoneda, K., Kato, C., and Sugawara, T. (2013). Au-
tonomous learning of target decision strategies
without communications for continuous coordinated
cleaning tasks. In 2013 IEEE/WIC/ACM International
Joint Conferences on Web Intelligence (WI) and In-
telligent Agent Technologies (IAT), volume 2, pages
216–223.
Zhou, X., Wang, W., Wang, T., Lei, Y., and Zhong, F.
(2019). Bayesian reinforcement learning for multi-
robot decentralized patrolling in uncertain environ-
ments. IEEE Transactions on Vehicular Technology,
68(12):11691–11703.
Autonomous Energy-Saving Behaviors with Fulfilling Requirements for Multi-Agent Cooperative Patrolling Problem
47
