
Language Agnostic Gesture Generation Model: A Case Study of
Japanese Speakers’ Gesture Generation Using English Text-to-Gesture
Model
Genki Sakata
1
, Naoshi Kaneko
2
, Dai Hasegawa
3
and Shinichi Shirakawa
1 a
1
Yokohama National University, Yokohama, Kanagawa, Japan
2
Aoyama Gakuin University, Sagamihara, Kanagawa, Japan
3
Hokkai Gakuen University, Sapporo, Hokkaido, Japan
Keywords:
Gesture Generation, Spoken Text, Multilingual Model, Neural Networks, Deep Learning, Human-Agent
Interaction.
Abstract:
Automatic gesture generation for speech audio or text can reduce the human effort required to manually create
the gestures of embodied conversational agents. Currently, deep learning-based gesture generation models
trained using a large-scale speech–gesture dataset are being investigated. Large-scale gesture datasets are
currently limited to English speakers. Creating these large-scale datasets is difficult for other languages. We
aim to realize a language-agnostic gesture generation model that produces gestures for a target language using
a different-language gesture dataset for model training. The current study presents two simple methods that
generate gestures for Japanese using only the text-to-gesture model trained on an English dataset. The first
method translates Japanese speech text into English and uses the translated word sequence as input for the
text-to-gesture model. The second method leverages a multilingual embedding model that embeds sentences
in the same feature space regardless of language and generates gestures, enabling us to use the English text-to-
gesture model to generate Japanese speech gestures. We evaluated the generated gestures for Japanese speech
and showed that the gestures generated by our methods are comparable to the actual gestures in several cases,
and the second method is promising compared to the first method.
1 INTRODUCTION
1.1 Background
Embodied conversational agents that interact with
humans have become common with the progress
of computing and artificial intelligence technologies.
Humans read information from verbal as well as non-
verbal cues, such as gestures and facial expressions
in human–human communication. Therefore, em-
bodied conversational agents, including virtual char-
acters and humanoid robots, are required to imple-
ment human-like gestures and realize smooth human–
computer interaction. However, manually creating
gestures is time-consuming and labor intensive for
content creators because it requires designing and im-
plementing gesture motions according to speech con-
tent. Even if we record gesture motions using a mo-
tion capture device, facilities and actors would be re-
a
https://orcid.org/0000-0002-4659-6108
quired. Automatic gesture generation methods have
been developed to automate the gesture creation pro-
cess (Cassell et al., 2001; Levine et al., 2010; Chiu
et al., 2015). Training a gesture generation model
based on deep learning is a recent trend (Ginosar
et al., 2019; Ahuja et al., 2020; Kucherenko et al.,
2020; Yoon et al., 2020; Bhattacharya et al., 2021).
1.2 Related Work on Gesture
Generation Models
Machine learning and deep learning techniques are
often used to construct gesture generation models. In
gesture generation models, speech audio or text is typ-
ically used as input. Output gestures are represented
by a sequence of 2D or 3D coordinates/joint angles
of human joint points. Specifically, audio features,
such as Mel frequency cepstral coefficient (MFCC),
and word embedding features, such as fastText (Bo-
janowski et al., 2017) and BERT (Devlin et al., 2019),
Sakata, G., Kaneko, N., Hasegawa, D. and Shirakawa, S.
Language Agnostic Gesture Generation Model: A Case Study of Japanese Speakers’ Gesture Generation Using English Text-to-Gesture Model.
DOI: 10.5220/0011643600003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 2: HUCAPP, pages
47-54
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
47

are used as input of gesture generation models.
Hasegawa et al. (2018) constructed a gesture gen-
eration model that predicts 64 3D-joint coordinates
from speech audio features. They used a bidirec-
tional long-short-term memory (LSTM) network and
a Japanese speech–gesture dataset of approximately
five hours created by Takeuchi et al. (2017) us-
ing a motion capture device. Ginosar et al. (2019)
created a large-scale English speech–gesture dataset
from YouTube videos (144 hours in total) by us-
ing the OpenPose system (Cao et al., 2017; Simon
et al., 2017) and trained the gesture generation model
using U-Net (Ronneberger et al., 2015), in which
the input and output of the model are speech audio
features and 49 2D-joint coordinate sequences, re-
spectively. Several studies have used speaker iden-
tity information as input to reflect personality and
style in generated gestures (Ahuja et al., 2020; Bhat-
tacharya et al., 2021; Yoon et al., 2020). Bhattacharya
et al. (2021) constructed a text-to-gesture model based
on Transformer (Vaswani et al., 2017), which used
speech text and speaker attributes as input and pre-
dicted 23 3D-joint coordinates. Asakawa et al. (2022)
evaluated text-to-gesture models using U-Net (Ron-
neberger et al., 2015). Their models take a word em-
bedding feature sequence as input and output a se-
quence of 49 2D-joint coordinates. They further im-
plied that the size and quality of gesture datasets af-
fect the quality of gestures generated.
In general, a large-scale dataset contributes to im-
proving the performance of deep learning-based mod-
els. Several works collected large-scale datasets of
English speech–gesture pairs (Ginosar et al., 2019;
Ahuja et al., 2020; Yoon et al., 2020) using the Open-
Pose system (Cao et al., 2017; Simon et al., 2017),
which estimates human skeletal information from
videos.
1.3 Motivation and Contribution
Although existing methods have succeeded in gen-
erating smooth and human-comparable gesture mo-
tions, the used large-scale datasets are limited to En-
glish speakers. Therefore, current gesture generation
studies are conducted primarily for English content.
Collecting a large-scale speech–gesture dataset is dif-
ficult for other languages, even when using Open-
Pose. This is because we should prepare appropriate
videos to collect high-quality gesture data by Open-
Pose, e.g., the angle and scale of view must be stable
during gestures, and the person performing the ges-
ture must fit on the screen. Such appropriate videos
that provide accurate gesture motions through Open-
Pose are limited in other languages spoken by not so
many people compared to English, such as Japanese.
Moreover, collecting a large speaker dataset using a
motion capture device is impractical owing to its high
cost. Additionally, collecting speech–gesture datasets
for many languages may be impractical.
This study aims to realize a language-agnostic
gesture generation model that produces gestures for
a target language using a different language’s large-
scale gesture dataset for model training. This would
be valuable for constructing gesture generation mod-
els for languages spoken by not so many people be-
cause we can eliminate the need to collect a ges-
ture dataset for a target language. To the best of our
knowledge, gesture generation for a target language
using only another language gesture datasets has not
been examined. Therefore, we start with simple ap-
proaches toward a language-agnostic gesture genera-
tion model.
We present two simple methods for applying
the text-to-gesture model trained using a specific
language dataset for speakers of another language.
In particular, this study considered generating ges-
tures of Japanese speakers by leveraging an English
speaker’s gesture generation model, as a case study.
In the first method, we simply translate Japanese
speech text into English using a translation sys-
tem and input the translated English word sequence
into the English text-to-gesture model. The sec-
ond method uses a multilingual embedding model
that embeds English and Japanese sentences in the
same feature space. We train the gesture generation
model from multilingual embedding features using
the English dataset and use it to produce gestures for
Japanese speech text. Our methods do not require
a Japanese speech–gesture dataset for model train-
ing. We evaluated the gestures generated for Japanese
texts using the proposed methods through a quantita-
tive evaluation and user study. The results show that
the quality of several gestures generated by our meth-
ods is comparable to that of actual gestures, and the
second method is better than the first one in several
cases.
The contribution of this paper are summarized as
follows:
• We tackled a novel problem setting for gesture
generation, which generates gestures for Japanese
texts using only the gesture generation model
trained on an English dataset.
• We proposed and evaluated two simple methods
that leverage the translation system or the multi-
lingual model.
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
48

2 PROPOSED METHODS
This section introduces the two methods used to ex-
ploit the text-to-gesture model trained on the English
dataset to generate gestures for Japanese speech texts.
First, we formally describe the problem setting in
2.1. In 2.2, we explain the text-to-gesture model we
used. Then, we describe the proposed methods in 2.3
and 2.4. Although we explain our gesture generation
method in terms of Japanese speech, we note that our
method is applicable for any language. An overview
of our methods is illustrated in Fig. 1.
2.1 Problem Setting
We specifically targeted the construction of a text-to-
gesture model for Japanese without Japanese speech–
gesture data for model training, while we can access
a sufficient amount of English speech–gesture data.
We considered using text information as input for the
gesture generation models rather than audio input to
leverage language translation systems and multilin-
gual embedding models. We used the English ges-
ture dataset collected by Ginosar et al. (2019) and its
text information provided by Asakawa et al. (2022).
This dataset contains 49 sets of 2D keypoint coordi-
nates for the neck, shoulders, arms, elbows, and fin-
gers obtained from video using OpenPose (Cao et al.,
2017; Simon et al., 2017), and the spoken words in
each frame. The frame per second of gesture mo-
tions was 15 FPS. We denote this English dataset
as D
EN
= {(x
i
,t
i
)|i = 1,...}, where x
i
∈ W
(N)
EN
and
t
i
∈ R
98×N
indicate the sequences of English words
and 49 2D-keypoint coordinates representing gesture
motion for the ith data, respectively, and N represents
the sequence length (the number of frames). Note that
to add the speech length information as input, words
are duplicated over the corresponding frames while
it is being pronounced. In addition, a special token
BLANK is used, which represents no utterance. Our
problem is to produce a text-to-gesture model for the
Japanese speech text input x
JP
∈ W
JP
only using the
English dataset D
EN
, where W
JP
indicates the set of
Japanese spoken word sequences.
2.2 Base Model of Text-to-Gesture
Generation
We adopted the text-to-gesture model proposed in
(Asakawa et al., 2022) as a baseline model. In the
proposed methods, we first train the text-to-gesture
model using the English dataset D
EN
. The train-
ing setting was the same as that in (Asakawa et al.,
2022), except for the word embedding method. Al-
though fastText (Bojanowski et al., 2017) was used
as the word embedding method in (Asakawa et al.,
2022), we used LaBSE (Feng et al., 2022) for multi-
lingual support. Word and sentence embedding have
been widely used in natural language processing; it
allows us to obtain a feature vector of a word or sen-
tence. The bidirectional encoder representations from
transformers (BERT) (Devlin et al., 2019) is a repre-
sentative model that obtains a word or sentence em-
bedding. Language-agnostic BERT sentence embed-
ding (LaBSE) (Feng et al., 2022) is a state-of-the-art
multilingual sentence embedding model for transla-
tion based on BERT. In LaBSE, multilingual sentence
embeddings are trained by combining several tasks; it
supports 109 languages. The LaBSE model provides
a multilingual embedding feature vector for a given
sentence, and multilingual sentences are embedded in
the same feature space. That is, similar meaning sen-
tences among different languages are expected to be
embedded in similar feature vectors.
Although LaBSE provides the embedded vector
for a sentence, we input a word into the model and
obtained the embedded vector for a word. This en-
ables us to use the existing text-to-gesture model di-
rectly and embed similar words into the similar fea-
ture vector regardless of language. Our second pro-
posed method exploits this LaBSE embedding prop-
erty. We denote the embedded feature vectors of the
word sequence x as e ∈ R
D×N
, where D is the di-
mension of the embedded feature. Each feature vector
e
j
∈ R
D
corresponding to the jth word x
j
in x is given
by e
j
= E
LaBSE
(x
j
). We denote the embedded vectors
of x as e = (e
1
,...,e
N
). Note that E
LaBSE
: W → R
D
indicates the word embedding function by LaBSE,
where W is the word space in any language. In
our case, the dimension of the embedded vector was
D = 768.
Then, the gesture generation function F :
R
D×N
→ R
98×N
was trained using the English dataset
D
EN
. Note that the input of the gesture generator is
the embedded vectors denoted by e = E
LaBSE
(x) ∈
R
D×N
. The neural architecture of the gesture gener-
ator is the U-Net-based convolutional neural network
(CNN) used in (Asakawa et al., 2022). In the archi-
tecture, the input vectors of D × N were downsam-
pled to the size of D× N/32 by 1D convolution oper-
ations; they were then transformed to a size of 98 × N
by upsampling and 1D convolution operations. There
are skip connections between the downsampling and
upsampling blocks. Note that any sequence length
can be processed because this architecture is a fully
convolutional neural network. Given the sequence
of ground-truth motion coordinates as t ∈ R
98×N
, the
Language Agnostic Gesture Generation Model: A Case Study of Japanese Speakers’ Gesture Generation Using English Text-to-Gesture
Model
49

Multilingual
Embedding Model
Gesture
Generator
Trained Using
English Dataset of 𝒟
!"
Generated
Gesture
Translation &
Frame Assignment
English Word
Sequence
Japanese
Spoken Word
Sequence
Method 1 (Translation)
Method 2 (Multilingual)
Figure 1: Overview of Our Methods.
loss function is defined by
E
(x,t)∈D
EN
[∥t − F (E
LaBSE
(x))∥
1
]
+ E
(x,t)∈D
EN
[∥T (t) − T (F (E
LaBSE
(x)))∥
1
] , (1)
where T (t) = (t
2
− t
1
,...,t
N
− t
N−1
) is the temporal
difference vector of the keypoint coordinates. The
first term is the L1 loss between the keypoint coor-
dinates of the ground truth and generated gesture, and
the second term is the L1 loss between the velocities
of the ground truth and generated gesture motions.
The details of the architecture and training hyperpa-
rameters can be found in (Asakawa et al., 2022). We
used the publicly available code from (Asakawa et al.,
2022).
In the proposed methods, we considered providing
gesture motions for Japanese speech text x
JP
∈ W
JP
using the text-to-gesture function F trained on the
English dataset D
EN
.
2.3 Gesture Generation by Translation
(Method 1)
In the first method, we translated Japanese speech
text pronounced in N
′
frames into English text us-
ing a language translation system. In the experiment,
we used DeepL,
1
a neural machine translation ser-
vice. Note that we cannot know which English word
should be assigned to each frame because the trans-
lated text does not have information on the pronunci-
ation length or timing of each word. Moreover, the
number of frames to be input into the gesture gener-
ator should be N
′
to generate a gesture of the same
length as the Japanese speech. To address this prob-
lem, we simply assigned the same number of frames
for each word such that the total sequence length was
N
′
. That is, the number of frames for each English
word was approximately N
′
/N
words
, where N
words
is
the number of words in the translated English text.
We denote the English word sequence with the N
′
frames given by this process as x
EN
∈ W
(N
′
)
EN
. Then,
we input the English word sequence into the word
1
https://www.deepl.com/
embedding and gesture generator to obtain the gen-
erated gesture motion as F (E
LaBSE
(x
EN
)). We call
this method “Method 1 (Translation).”
The order and number of words in sentences be-
tween Japanese and English differ, even if they ex-
press the same meanings. The text-to-gesture model
provides the gesture motion based on the input En-
glish word order and number of frames for each En-
glish word. Therefore, the generated gestures can
mismatch with the original Japanese speech text, may
leading to unnatural gestures. However, we note that
human gestures are not so rigorously time-aligned
with spoken words. Namely, the timing of a ges-
ture and a spoken word could be misaligned in hu-
man communication, as indicated in (McNeill, 1996).
Therefore, we experimentally evaluate the perfor-
mance of this simple method.
2.4 Gesture Generation Using
Multilingual Embedding (Method 2)
The second method exploits the property of multi-
lingual embedding models for gesture generation in
different languages. We prepared a Japanese speech
text pronounced in N
′
frames, x
JP
∈ W
(N
′
)
JP
, which
includes the number of pronounced frames for each
Japanese word. This speech text information was
obtained using the speech-to-text system in the ex-
periment. We applied the LaBSE model directly to
x
JP
to obtain the embedded feature vectors as e =
E
LaBSE
(x
JP
). Subsequently, we input the embedded
feature vectors into the gesture generator, obtaining
the gesture motion as F (E
LaBSE
(x
JP
)). We call this
method “Method 2 (Multilingual).”
The LaBSE multilingual language model provides
the same feature space between different languages,
and the text-to-gesture model was trained to gener-
ate gesture motions from embedded features. There-
fore, we expected that the gesture generator would
work properly for Japanese speech text, even if it was
trained on an English text-gesture dataset. In this
method, the order of words and number of frames for
each word in the input of the gesture generator were
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
50
Table 1: Mean absolute error (MAE) between the coordi-
nates of the generated gesture and ground truth motion.
Video Method 1 Method 2
ID (Translation) (Multilingual)
1 79.20 69.58
2 179.08 135.75
3 102.23 123.81
4 78.52 42.38
5 154.39 154.12
maintained the same as in the original Japanese text.
Therefore, we expected this method to generate ges-
ture motions based on the original Japanese text infor-
mation, leading to more natural gesture motions than
Method 1 (Translation).
3 EXPERIMENT AND RESULTS
3.1 General Settings
As described in Section 2.1, we used the English
speech-gesture dataset provided by Ginosar et al.
(2019),
2
and its text information was provided by
Asakawa et al. (2022)
3
as D
EN
. We chose speaker
“Oliver” to train the text-to-gesture model owing to
the large size and high quality of motions extracted
by OpenPose in Oliver’s dataset. Although the dataset
contains face keypoints, they were unused in the ges-
ture generator. However, the face keypoints are used
when displaying the gesture motions in the user study.
The number of frames in the training data was N = 64
(≈ 4.2 s).
We used the pretrained LaBSE model.
4
To tok-
enize an input word, we used the code from (Yang
et al., 2021) following the instructions of the LaBSE
model. A zero vector was assigned for the token
BLANK, indicating that the frame does not contain a
word. The pretrained model for word embedding is
not updated during the training of the gesture genera-
tor.
We prepared the Japanese speech data to com-
pare the generated gestures using our methods. We
collected data by trimming five YouTube videos of
Japanese speakers.
5
As for the English dataset, we
2
https://github.com/amirbar/speech2gesture
3
https://github.com/GestureGeneration/text2gesture
cnn
4
https://tfhub.dev/google/LaBSE/2
5
The number of videos for evaluation is small because
collecting clean Japanese speakers’ gesture data by Open-
Pose is difficult due to the small scale of videos compared
with English, as in our motivation. We aim to evaluate the
concept of our methods and demonstrate the possibility of
Table 2: Standard deviation (STD) of keypoint coordinates
of generated gestures.
Video Ground Method 1 Method 2
ID Truth (Translation) (Multilingual)
1 27.3 34.3 39.4
2 102.7 135.7 53.0
3 64.4 48.6 96.4
4 8.9 90.5 35.3
5 47.4 104.6 34.9
Table 3: Percentage of correct keypoints (PCK) between the
keypoints of the generated gesture and ground truth motion.
Video Method 1 Method 2
ID (Translation) (Multilingual)
1 0.13 0.17
2 0.08 0.10
3 0.20 0.17
4 0.36 0.55
5 0.06 0.05
extracted 49 2D keypoint coordinates and face key-
points using OpenPose; the spoken words in each
frame were extracted using the Google Cloud Speech-
to-Text API. The speakers in Videos 1 to 4 are male,
whereas the speaker in Video 5 is female. The length
of Video 1 is 64 frames (≈ 4.2 s), that of Videos 2 and
3 is 128 frames (≈ 8.5s), and that of Videos 4 and 5
is 192 frames (12.8s).
3.2 Quantitative Evaluation of
Generated Gestures
We report the mean absolute error (MAE) between the
coordinates of the generated gesture and ground-truth
motion, and the standard deviation (STD) of the key-
point coordinates as quantitative metrics. The MAE
is a measure of how similar the generated gesture is
to the actual motion, and the STD is a measure of
the scale of the gesture. The coordinates were stan-
dardized when calculating these metrics, and the STD
was averaged over 98 coordinates. Tables 1 and 2
show the MAE and STD for each video, respectively.
We observed that Method 2 (Multilingual) can gen-
erate gestures with a smaller MAE than Method 1
(Translation), except for Video 3. The STD values of
Method 1 (Translation) are closer to the ground truth
than those of Method 2 (Multilingual) in Videos 1, 2,
and 3, whereas those of Method 2 (Multilingual) are
closer in Videos 4 and 5.
We also report the probability of correct keypoints
(PCK) (Yang and Ramanan, 2013), a widely used
metric for pose detection, between the keypoints of
Japanese gesture generation using only the English dataset.
Language Agnostic Gesture Generation Model: A Case Study of Japanese Speakers’ Gesture Generation Using English Text-to-Gesture
Model
51
Table 4: Questionnaire used in the user study.
Q1 (Naturalness) Which gesture looks natural?
Q2 (Smoothness) Which gesture looks smooth?
Q3 (Human-Likeness) Which gesture looks like a human movement?
Q4 (Voice Match) Which gesture matches the speech voice?
Q5 (Content Match) Which gesture matches the speech content?
Q6 (Understandability) Which gesture promotes understanding of the speech content?
Table 5: Evaluation results from the user study. Each value indicates the rate answered that the generated gesture is equal to
or better than the ground truth. The bold font indicates the higher value between Methods 1 and 2, and the underline indicates
that a significant difference exists between the rates of Methods 1 and 2 at a significance level of 5% by Fisher’s exact test.
Video ID Method Q1 Q2 Q3 Q4 Q5 Q6
1
Method 1 (Translation) 0.25 0.3125 0.4375 0.4375 0.375 0.6875
Method 2 (Multilingual) 0.25 0.375 0.3125 0.1875 0.5 0.5
2
Method 1 (Translation) 0.125 0.1875 0.125 0.25 0.375 0.4375
Method 2 (Multilingual) 0.6875 0.5625 0.6875 0.4375 0.5 0.5625
3
Method 1 (Translation) 0.1875 0.375 0.3125 0.1875 0.1875 0.125
Method 2 (Multilingual) 0.0625 0 0.25 0.0625 0.125 0.0625
4
Method 1 (Translation) 0.5625 0.5625 0.5 0.6875 0.6875 0.8125
Method 2 (Multilingual) 0.6875 0.9375 0.5625 0.75 0.875 1
5
Method 1 (Translation) 0.25 0.1875 0.3125 0.125 0.125 0.25
Method 2 (Multilingual) 0.5 0.4375 0.4375 0.1875 0.375 0.375
the generated gesture and ground truth motion. The
PCK is the accuracy given by comparing the key-
points between the generated and ground truth mo-
tion. As done in (Ginosar et al., 2019), the averaged
PCK values over α = 0.1,0.2 are reported, where α
is a parameter determining acceptable errors between
predicted and ground truth keypoints. Table 3 shows
the PCK values for each video. The tendency of the
result is similar to that of MAE. That is, Method 2
(Multilingual) is superior to Method 1 (Translation)
for three videos. Because there is generally no unique
correct gesture for a given speech, the quality of ges-
tures generated should be evaluated in a user study.
3.3 User Study for Generated Gestures
In the user study, each gesture generated for the
Japanese speech was compared to the correspond-
ing ground truth motion extracted by OpenPose to
evaluate the generated gestures. A total of 32 na-
tive Japanese speakers, 26 men and six women be-
tween the ages of 18 and 51, participated. We fol-
lowed the user study conducted in (Asakawa et al.,
2022). Participants watched the generated gesture
and its ground-truth motion videos placed one above
the other and then answered six questions on ges-
ture quality. The position of the generated gesture
and ground-truth motion was randomized. The face
keypoints extracted by OpenPose and speech audio of
the original video were also displayed with the ges-
ture motions. The questionnaire for the participants is
shown in 4. Each participant watched the videos and
selected the answers from “Upside,” “Downside,” and
“Same level.” The user study was conducted using a
Google form. Participants answered to either the ex-
periment for Method 1 or 2, i.e., participants did not
score both Methods 1 and 2. We collected the answers
from 16 participants for each method.
If a participant selected the answer corresponding
to the generated gesture or that of “Same level,” the
generated gesture can be regarded equal to or better
than the ground-truth gesture. We computed the rate
answered that the generated gesture is equal to or bet-
ter than the ground-truth for each question. That is,
the high value of this rate indicates a better gesture.
Table 5 shows the results of the user study, where the
bold font indicates the higher value between Methods
1 and 2, and the underline indicates that a statistical
significance exists between Methods 1 and 2.
We observe that all values for Video 4 by Meth-
ods 1 and 2 and that the most values for Video 2 by
Method 2 are greater than 0.5, implying that the ges-
tures generated are comparable to ground-truth mo-
tions. The generated gestures obtaining high scores
in Video 4 may be because the ground-truth motion
in Video 4 has fewer movements, whereas the gener-
ated gestures have more movements, as shown in Fig.
2. Comparing Methods 1 and 2, Method 2 shows bet-
ter results in Videos 2, 4, and 5 although the scores
of Method 2 are inferior to Method 1 in Video 3. We
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
52
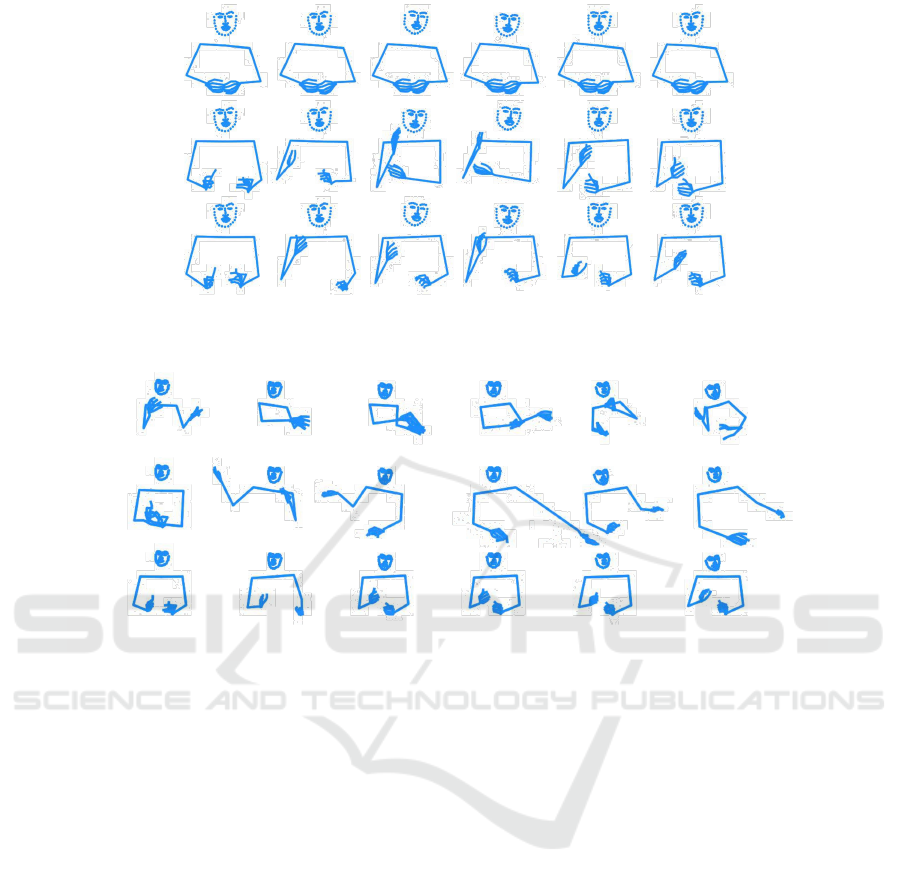
Ground
Truth
Method 1
Method 2
Figure 2: Example of the generated and ground-truth gestures for Videos 4. Each image is 0.5 seconds apart.
Ground
Truth
Method 1Method 2
Figure 3: Example of the generated and ground-truth gestures for Videos 2. Each image is 0.5 seconds apart.
observe from Fig. 3 that the gesture by Method 2 is
more smooth and natural than that of Method 1 and
even that of the ground truth motion. In this case,
the hand motion in the gesture generated by Method
1 appeared to be mismatching the speech content and
unnatural. Checking gestures for Video 3, the gesture
generated by Method 2 included mismatch and unnat-
ural movements, as observed in Video 2 by Method 1.
4 CONCLUSION
This study presented two simple methods to gener-
ate gestures for a target language without its ges-
ture dataset. We demonstrated gesture generation of
Japanese speech text using the text-to-gesture model
trained on an English dataset. The experimental eval-
uation showed that our methods could generate ges-
tures comparable to actual gestures in several cases.
In addition, we observed that Method 2 (Multilingual)
is better than Method 1 (Translation) in several cases.
An extensive user study with more Japanese speeches
and participants should be conducted to fully under-
stand the effect of our methods. In particular, inves-
tigating when Method 2 is superior to Method 1 will
be useful for future research. Although we used only
text information as model input, adding audio infor-
mation to the gesture generator is a possible focus for
future work.
Our methods can be straightforwardly applied to
other languages other than Japanese. It can be real-
ized by translating the target language sentence to En-
glish using a translation system in Method 1 (Trans-
lation). For Method 2 (Multilingual), we can em-
bed other language sentences into the same feature
space by the multilingual model of LaBSE and gen-
erate gestures. Extending our case study to other lan-
guages is an interesting direction. Finally, fine-tuning
the gesture generation model using a small dataset of
the target language is a possible future work.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI, Japan
Grant Number JP21K12160.
Language Agnostic Gesture Generation Model: A Case Study of Japanese Speakers’ Gesture Generation Using English Text-to-Gesture
Model
53

REFERENCES
Ahuja, C., Lee, D. W., Nakano, Y. I., and Morency, L.
(2020). Style transfer for co-speech gesture anima-
tion: A multi-speaker conditional-mixture approach.
In European Conference on Computer Vision (ECCV),
volume 12363 of LNCS, pages 248–265. Springer In-
ternational Publishing.
Asakawa, E., Kaneko, N., Hasegawa, D., and Shirakawa,
S. (2022). Evaluation of text-to-gesture generation
model using convolutional neural network. Neural
Networks, 151:365–375.
Bhattacharya, U., Rewkowski, N., Banerjee, A., Guhan, P.,
Bera, A., and Manocha, D. (2021). Text2Gestures:
A transformer-based network for generating emotive
body gestures for virtual agents. In 2021 IEEE Virtual
Reality and 3D User Interfaces (VR).
Bojanowski, P., Grave, E., Joulin, A., and Mikolov, T.
(2017). Enriching word vectors with subword infor-
mation. Transactions of the Association for Computa-
tional Linguistics, 5:135–146.
Cao, Z., Simon, T., Wei, S.-E., and Sheikh, Y. (2017). Real-
time multi-person 2d pose estimation using part affin-
ity fields. In 2017 IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 1302–
1310.
Cassell, J., Vilhj
´
almsson, H. H., and Bickmore, T. (2001).
BEAT: The behavior expression animation toolkit. In
28th Annual Conference on Computer Graphics and
Interactive Techniques (SIGGRAPH ’01), pages 477–
486. Association for Computing Machinery.
Chiu, C.-C., Morency, L.-P., and Marsella, S. (2015). Pre-
dicting co-verbal gestures: A deep and temporal mod-
eling approach. In 15th International Conference
on Intelligent Virtual Agents (IVA), pages 152–166.
Springer International Publishing.
Devlin, J., Chang, M.-W., Lee, K., and Toutanova, K.
(2019). BERT: Pre-training of deep bidirectional
transformers for language understanding. In 2019
Conference of the North American Chapter of the
Association for Computational Linguistics (NAACL),
pages 4171–4186. Association for Computational
Linguistics.
Feng, F., Yang, Y., Cer, D., Arivazhagan, N., and Wang,
W. (2022). Language-agnostic BERT sentence em-
bedding. In 60th Annual Meeting of the Association
for Computational Linguistics (ACL), pages 878–891.
Association for Computational Linguistics.
Ginosar, S., Bar, A., Kohavi, G., Chan, C., Owens, A., and
Malik, J. (2019). Learning individual styles of con-
versational gesture. In 2019 IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 3492–3501.
Hasegawa, D., Kaneko, N., Shirakawa, S., Sakuta, H., and
Sumi, K. (2018). Evaluation of speech-to-gesture gen-
eration using bi-directional lstm network. In 18th In-
ternational Conference on Intelligent Virtual Agents
(IVA), pages 79–86. Association for Computing Ma-
chinery.
Kucherenko, T., Jonell, P., van Waveren, S., Henter,
G. E., Alexandersson, S., Leite, I., and Kjellstr
¨
om, H.
(2020). Gesticulator: A framework for semantically-
aware speech-driven gesture generation. In 2020
International Conference on Multimodal Interaction
(ICMI), pages 242–250. Association for Computing
Machinery.
Levine, S., Kr
¨
ahenb
¨
uhl, P., Thrun, S., and Koltun, V.
(2010). Gesture controllers. ACM Transactions on
Graphic, 29(4).
McNeill, D. (1996). Hand and Mind: What Gestures Reveal
about Thought. University of Chicago Press.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
Net: Convolutional networks for biomedical image
segmentation. In International Conference on Med-
ical Image Computing and Computer-Assisted Inter-
vention (MICCAI), pages 234–241. Springer Interna-
tional Publishing.
Simon, T., Joo, H., Matthews, I., and Sheikh, Y. (2017).
Hand keypoint detection in single images using mul-
tiview bootstrapping. In 2017 IEEE Conference on
Computer Vision and Pattern Recognition (CVPR),
pages 4645–4653.
Takeuchi, K., Kubota, S., Suzuki, K., Hasegawa, D.,
and Sakuta, H. (2017). Creating a gesture-speech
dataset for speech-based automatic gesture genera-
tion. In HCI International 2017 – Posters’ Extended
Abstracts, pages 198–202. Springer International Pub-
lishing.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L., and Polosukhin, I.
(2017). Attention is all you need. In Advances in
Neural Information Processing Systems, volume 30.
Curran Associates, Inc.
Yang, Y. and Ramanan, D. (2013). Articulated human de-
tection with flexible mixtures of parts. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
35(12):2878–2890.
Yang, Z., Yang, Y., Cer, D., Law, J., and Darve, E. (2021).
Universal sentence representation learning with con-
ditional masked language model. In 2021 Confer-
ence on Empirical Methods in Natural Language Pro-
cessing (EMNLP), pages 6216–6228. Association for
Computational Linguistics.
Yoon, Y., Cha, B., Lee, J.-H., Jang, M., Lee, J., Kim, J., and
Lee, G. (2020). Speech gesture generation from the
trimodal context of text, audio, and speaker identity.
ACM Transactions on Graphics, 39(6).
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
54
