
Constraint-Based Filtering and Evaluation of CSP Search Trees
Maximilian Bels, Sven L
¨
offler and Ilja Becker and Petra Hofstedt
Programming Languages and Compilers Group, Brandenburg University of Technology,
Konrad-Wachsmann-Allee 5, Cottbus, Germany
fl
Keywords:
Constraint Programming, Finite-Domain Constraint Satisfaction Problem, CSP, Search Tree,
Constraint-Based Filtering.
Abstract:
Using Constraint Programming (CP) real world problems can be described conveniently in a declarative way
with constraints in a so-called constraint satisfaction problem (CSP). Finite domain CSPs (FD-CSPs) are one
form of CSPs, where the domains of the variables are finite. Such FD-CSPs are mostly evaluated by a search
nested with propagation, where the search process can be represented by search trees. Since search can quickly
become very time-consuming, especially with large variable domains (solving CSPs is NP-hard in general),
heuristics are used to control the search, which in many cases — depending on the problem — allow to achieve
a performance gain. In this paper, we present a new method for filtering and evaluating search trees of FD-
CSPs. Our new tree filtering method is based on the idea of formulating and evaluating filters as constraints
over FD-CSP search trees. The constraint-based formulation of filter criteria proves to be very flexible. Our
new technique was integrated into the Visual Constraint Solver (VCS) tool, which allows the solution process
of CSPs to be followed interactively and step by step through a suitable visualization.
1 INTRODUCTION
Finite-Domain Constraint Satisfaction Problems (FD-
CSPs) are evaluated by search nested with propaga-
tion. Search heuristics control the search. They affect
the structure of the search trees of CSPs and can, thus,
influence the performance of CSP evaluation. Our
aim is to compare, review and better understand the
impact of search heuristics.
Search trees can quickly become extraordinarily
large. At the same time, for a comparison or review,
one only wants to consider certain sections of the tree.
Thus, we want to be able to formulate and evalu-
ate criteria for particularly interesting sets of search
nodes and parts of search trees.
In this paper, we present a new method for formu-
lating criteria and filtering and evaluating search trees
of FD-CSPs. The main idea is to formulate the search
tree filters themselves as CSPs. Data of nodes and
their relations in subtrees can be described very flex-
ibly by variables and constraints. A constraint solver
can be used to evaluate the filter CSPs and provide
optimized solutions.
Our new method was integrated into the Visual
Constraint Solver (VCS). VCS is a tool for the visu-
alization of FD-CSP evaluation developed at the Pro-
gramming Languages and Compilers group (PSCB)
at BTU Cottbus-Senftenberg. VCS takes as in-
put MiniZinc (MiniZinc, 2022) programs describing
CSPs and allows to visualize the static CSP as well as
the solution process by a search tree and log files.
Related Work. Some tools for the visualization of
CSPs and search trees have been documented in the
literature, among them a constraint graph viewer for
the platform G12 (Mak, 2022), DPViz (for SAT prob-
lems) (Sinz and Dieringer, 2005), CPViz (Simonis
et al., 2010) and DrawCSP (Li and Epstein, 2010).
These tools are typically designed for specific con-
straint languages or solvers, they often visualize CSP
networks, but do not visualize the search trees, and
even if so, they do not allow to define filters on trees
as flexible as our method does. In contrast, VCS
works on MiniZinc models which are solver inde-
pendent, is very flexible in the definition of search
tree filters, supports the interactive visualization of
search trees and node properties and even allows to
compare different search strategies at the same time.
Moreover, VCS supports the visualization of (multi-
dimensional) arrays, which is a further unique feature
of our tool.
The paper is structured as follows: Section 2 re-
calls basic terms and definitions of the area of con-
220
Bels, M., Löffler, S., Becker, I. and Hofstedt, P.
Constraint-Based Filtering and Evaluation of CSP Search Trees.
DOI: 10.5220/0011641100003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 220-227
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
straint programming. We introduce the notions of
filter criteria and filter models in Section 3. Follow-
ing, Section 4 discusses technical and implementation
details of our constraint-based approach to filtering
search trees as well as the visualization inside our tool
VCS. Section 5 demonstrates the modelling of further
useful filters. Finally, in Section 6 we conclude the
paper and give directions of future research.
2 CONSTRAINT
PROGRAMMING
This section provides basic concepts and defini-
tions of constraint programming (based on (Dechter,
2003)).
Definition 1 (constraint). Let X be a set of variables.
A constraint c = (X
′
, R) is a relation R over a subset
X
′
of the variables of X, i.e. X
′
⊆ X.
The relation R of a constraint c = (X,R) repre-
sents a subset of the Cartesian product of the domain
values D
1
× ... × D
n
of the corresponding variables
x
1
, ..., x
n
∈ X. It can be given explicitly by the con-
cerning value tuples or implicitly by a mathematical
description.
Definition 2 (CSP). A constraint satisfaction problem
(CSP) is defined as a triple P = (X, D,C), where
• X = {x
1
, . . . , x
n
} is a set of variables,
• D = {D
1
, . . . , D
n
} is a corresponding set of do-
mains, i.e. D
i
is the domain of x
i
, and
• C = {c
1
, . . . , c
m
} is a set of constraints.
In the following, we only consider finite domain-
CSPs (FD-CSPs) (and write CSP), where the variable
domains are finite.
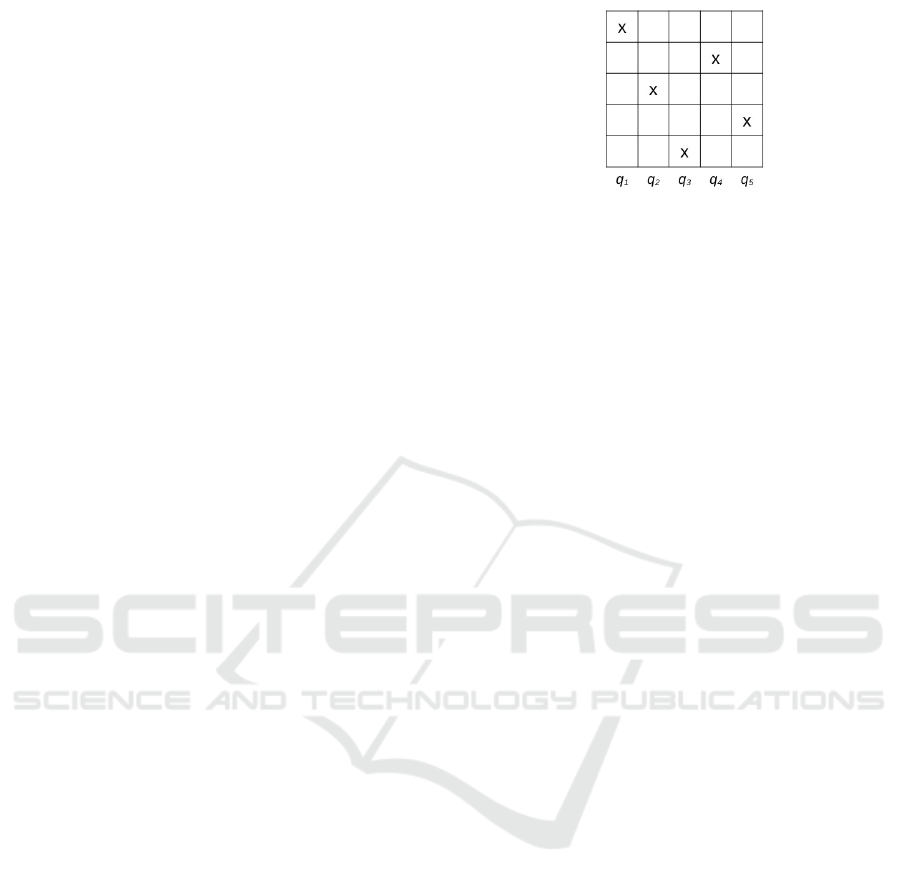
Example 1. The n-queens problem aims to place n
queens on an n × n-chess board such that the queens
do not attack each other. For example, for the 5-
queens instance we can give a CSP P = (X, D,C) as
follows:
• X = {q
1
, . . . , q
5
} are variables to represent the
queens, such that queen q
i
is placed on column
i,
• D = {D
1
, . . . , D
5
|D
1
= . . . = D
5
= {1, 2, 3, 4, 5}}
are the domains of the variables q
i
; they represent
the row numbers on the board,
• C = {alldifferent({q
1
, . . . , q
5
}),
alldifferent({q
i
+ i | i ∈ {1, . . . , n}}),
alldifferent({q
i
− i | i ∈ {1, . . . , n}})}
are the constraints to ensure that the queens can-
not threaten each other. Here, the first constraint
says that all q
i
should be different, this ensures
Figure 1: A solution of the 5-queens problem.
distinct rows for the queens. The other two con-
straints determine distinct diagonals. At this, the
alldifferent constraint is a so-called global con-
straint which ensures that the values of all in-
cluded variables are distinct.
A solution of a CSP is an instantiation of all its
variables with values from their domains, that satis-
fies all the constraints (Dechter, 2003). For example,
the 5-queens problem has 10 solutions, including e.g.
q
1
= 1, q
2
= 3, q
3
= 5, q
4
= 2, q
5
= 4 as illustrated by
Figure 1.
The search for solutions of a CSPs is realized
by constraint solvers which use backtracking-based
depth-first search. To speed-up the search, it is inter-
leaved with constraint propagation steps. Each indi-
vidual constraint describes a set of allowed tuples. By
propagating a constraint one can constrain the search
space locally, i.e. values that do not satisfy a con-
straint and are therefore not involved in any solution,
are removed from the search space. The solver per-
forms such propagation steps in alternation with vari-
able instantiation during search. This process is de-
scribed in detail e.g. in (Dechter, 2003; Marriott and
Stuckey, 1998).
Furthermore, search heuristics are used in the
search for solutions of CSPs. We distinguish between
variable ordering and value ordering heuristics (van
Beek, 2006).
Variable ordering heuristics decide which vari-
able is next instantiated to a value during the
backtracking-based search. Different variable heuris-
tics typically yield differently structured search trees.
The goal of these heuristics are strong domain restric-
tions early on and narrow search trees. This can be
achieved e.g. with the first-fail heuristic, where vari-
ables with the smallest domains are chosen first. With
a similar intention, the most-constraint heuristic first
takes variables that are attached to many constraints
of the given CSP.
Value ordering heuristics decide which value a
previously selected variable is assigned. Value heuris-
tics do not affect the general structure of the search
tree, but they lead to a reordering of the sub trees of
a search tree. This is particularly interesting and can
Constraint-Based Filtering and Evaluation of CSP Search Trees
221

be advantageous if only a first solution or best solu-
tion(s) are sought or when parallel search or no-good
learning is applied.
Both kinds of heuristics manipulate the search tree
and thus can significantly affect the time required in
the solution process. For this reason, it is important to
evaluate different search heuristics in order to predict
a good or potentially best strategy for solving a given
problem as quickly as possible.
Constraint solvers, such as the Choco
solver (Choco, 2022), provide a number of vari-
able and value ordering heuristics. However, the
appropriate choice of the heuristics is the responsibil-
ity of the user.
3 DEFINING FILTER MODELS
Our aim is to review and evaluate the performance of
search heuristics by assessing and comparing search
trees of CSPs. This is realized by filters on search tree
node sets, expressed themselves as CSPs and evalu-
ated by a constraint solver.
In this section, we first recall search trees. Next,
we explain the notions and usages of properties of
search tree nodes and filter criteria on sets of such
nodes. On top of these, we define the notion of a fil-
ter model which allows to express constraints on node
sets and subtrees of search trees.
3.1 Search Trees
Definition 3 (search tree). Let a CSP P = (X , D,C)
be given. A search tree for P is a tree T, whose nodes
represent P enriched by instantiations to subsets of
X. For every node in T , we assume that consistency
enforcement has been applied. The root of T stands
for P (after consistency enforcement and with no fur-
ther variable instantiation). A child of a node n is an
extension of the instantiation of n for exactly one vari-
able v of X , where the size of the remaining domain of
v is greater than one. A leaf is either a solution of P
or inconsistent (noticed by f ail).
Example 2. We consider a CSP P = (X , D,C)
with X = {x, y, z}, D = {D
x
= D
y
= {0, 1, 2}, D
z
=
{0, 1, 2, 3}} and C = {x < y, z = x + y}. A search tree
for P is given in Figure 2.
The root node stands for the original problem P,
where propagation of the constraints has already been
performed and, thus, the domains of the variables
have been narrowed. E.g. from x < y follows, that
x cannot be 2 and y cannot be 0.
P has two child nodes P
1
and P
2
. P
1
represents P,
where we assigned 0 to x. These instantiations are no-
ticed on the edges between the parent and child nodes.
By further propagation for consistency enforcement,
also the domains of the other variables may be af-
fected, for P
1
e.g. 3 is removed from the domain of
z.
Finally, for P the solution process reveals three so-
lutions as shown in the leaf nodes of the tree.
3.2 Node Properties and Filter Criteria
To describe, to filter, and to cut out parts of a search
tree with certain interesting properties with respect to
the solution process we use properties of the search
tree nodes and call them node properties. Since the
search tree is dynamically generated resp. traversed
during the solution process by backtracking search,
node properties are gained dynamically during search.
We identified certain relevant node properties. At
this, we take as basis a left-to-right backtrack search
and consider properties which appear caused by the
course of the search and the tree structure (properties
a-i) as well as properties of the CSP and variable in-
stantiations at the corresponding node (properties j-k).
The node properties of node n include the following
(this list is not exclusive and can even be extended by
the user):
a the discovery index n
id
∈ N of the node n in the
left-to-right backtracking order of the tree (the
root node has discovery index 1),
b the number n
solutions
∈ N of solutions found so far
(during backtracking search, including n), when
the node n is reached in the tree,
c the number n
leafs
∈ N of leaf nodes (solutions
and dead ends, including n) found so far during
search,
d the depth n
depth
∈ N of the node in the search tree,
e the index n
parentId
∈ N ∪ {−1} of the parent of
node n (or −1 in case n is the root),
f a truth value (0 for false, 1 for true) n
isLeft
to ex-
press, whether n is a left-most child of it’s parent
(or 1 in case n is the root),
g the index n
lastLeftParentId
∈ N of the closest left an-
cestor of n, that is, the closest ancestor where
n
isLeft
is 1,
h a truth value (0 for false, 1 for true) n
isSolution
to ex-
press, whether n represents a solution (leaf node),
i a truth value (0 for false, 1 for true) n
isContradiction
to express, whether n is a contradiction (leaf
node),
j the size n
a,domainSize
∈ N of the domain of a certain
variable a,
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
222

P
with x ∈ {0, 1}, y ∈ {1, 2}, z ∈ {1, 2, 3}
P
1
x ∈ {0}, y ∈ {1, 2}, z ∈ {1, 2}
P
1,1
x ∈ {0}, y ∈ {1}, z ∈ {1}
y = 1
P
1,1
x ∈ {0}, y ∈ {2}, z ∈ {2}
y = 2
x = 0
P
2
x ∈ {1}, y ∈ {2}, z ∈ {3}
x = 1
Figure 2: Search tree for Example 2.
k the domain value of a variable a, in case that the
variable is finally instantiated n
a,instantiatedTo
∈ D
a
(otherwise undefined).
To analyse, to visualize, and to compare search
trees to better understand search behaviour we want
to filter search trees and nodes by certain criteria. We
use the above explained node properties, either di-
rectly or for the formulation of complexer constraints
over several nodes or parts of a search tree.
We give typical definitions of potentially interest-
ing filter criteria for node sets and subtrees. Later on,
we will see that the user of our system will be able to
define such criteria and constraints by himself.
A Variable instantiations. A first, simple filter
goal is to find the positions or nodes in a search
tree, where a specific variable a is assigned a spe-
cific value v
a
. Find a node n, such that holds:
n
a,instantiatedTo
= v
a
.
B Number of nodes visited to find a certain number
of solutions. As well, one can be interested to
find out, how many nodes have been visited until
m solutions were found. Determine a node n, such
that holds: n
solutions
= m. The discovery index n
id
of n is the searched number of visited nodes.
There are also clearly more complex descriptions
possible, which refer to subtrees or node sets, e.g. so-
lution density or domain reduction.
C Solution density. The solution density describes
the proportion of solutions in the set of leafs in a
certain region of the search tree.
Definition 4 (solution density). The solution den-
sity den(n
1
, n
2
) of a set of all nodes visited during
search between the nodes n
1
(visited first) and n
2
(visited last) is defined by:
den(n
1
, n
2
) :=
n
2
solutions
− n
1
solutions
n
2
leafs
− n
1
leafs
,
whereby n
1
solutions
≤ n
2
solutions
, n
1
leafs
≤ n
2
leafs
.
With additional constraints on the nodes, one can
search for appropriate nodes n
1
and n
2
which
determine a search tree. In this way, one can
search for subtrees with a high/low solution den-
sity which may indicate areas in the tree, where
the used heuristics are particularly effective/inef-
fective.
D Domain reduction. The domain reduction de-
scribes the strength of the reduction of a variable
domain in the progression of the search between
two nodes in the tree.
Definition 5 (domain reduction). The domain re-
duction red(n
1
, n
2
, a) by search during tree traver-
sal between the nodes n
1
and n
2
and with respect
to variable a is defined by:
red(n
1
, n
2
, a) := 1 −
n
2
a,domainSize
n
1
a,domainSize
.
At this, we assume, that n
2
is a node in a subtree
with root n
1
. Thus, also n
2
a,domainSize
≤ n
1
a,domainSize
holds.
With domain reduction we can observe the influ-
ence of a heuristics on the domain of certain vari-
ables in search trees, e.g. we can filter for parts,
where the domain is reduced by e.g. 50 %. With
additional constraints on the indices of the two
nodes n
1
and n
2
we can find positions in the tree
with a fast/slow domain reduction for certain vari-
ables.
Again, and as for the filter properties holds: The
set of filter criteria is extendable and programmable
by the user of our system.
3.3 Filter Models
Depending on the application case, one may be inter-
ested in different node properties and evaluation cri-
teria. E.g. consider a lecture in Constraint Program-
ming, where the instructor wants to explain the idea of
Constraint-Based Filtering and Evaluation of CSP Search Trees
223

search and search trees in general. In this case, it may
be sensitive to focus on simple properties like node
indexes, node depth in a search tree, or the number of
decisions taken during search up to a certain node. In
contrast, if one wants to optimize a search heuristics
for a certain problem class, more complex, composed
criteria (as e.g. in Definition 4) might be important.
To allow a definition of criteria as individually and
freely as possible, we decided to define and handle
themselves as CSPs. Such CSP models of criteria are
called filter CSPs or filter models in the following.
A filter model is a CSP F modeled around an orig-
inal CSP P (i.e. the problem CSP) and its search tree.
One the one hand, a filter model F may contain ad-
ditional variables and constraints to enhance the origi-
nal CSP P. This may help to shrink a given problem to
be able to consider partial aspects of P, e.g. consider
P, where a certain variable instantiation is somehow
fixed. On the other hand (and more interestingly), the
filter CSP F describes constraints over the nodes of
the search tree. Thus, the variables of F represent tree
nodes and tree node properties. Accordingly, the do-
main D
n
of such a search node variable n is the set
of all search tree nodes (represented by a unique node
index), the domain D
n,prop
of a property variable of
a tree node is the set of the possible values of such
a property. Finally, constraints of F describe search
node sets and constraints on them.
Definition 6 (filter model). Given a problem CSP P =
(X, D,C). A filter CSP (or filter model) F = (X
P
∪
X
N
, D
P
∪ D
N
,C
F
) consists of
• a set X
P
of variables with finite domains D
P
(to
enhance the original CSP P),
• a set X
N
of variables with finite domains D
N
(to
describe search tree nodes and search tree node
properties)
• a set C
F
of constraints over X
P
∪ X
N
∪ X.
While the set C
F
of constraints may contain fur-
ther model constraints on P (as explained above), it
primarily consists of constraints on search tree nodes.
These constraints are used to specify node sets of a
search tree by specifying desired node properties and
relations between the nodes and node properties.
Example 3. Let the CSP P from Example 1 describ-
ing the 5-queens problem be given. A filter model
F = (X
N
, D
N
,C
F
) with
• X
N
= {n, n
isSolution
},
• D
N
= {D
n
, D
n
isSolution
= B }, where D
n
is the set of
all search tree nodes (represented by unique in-
dexes), and
• C
F
= {n ≤ 30, n
isSolution
= true}
specifies a filter which provides all solutions within
the first 30 search tree nodes visited during backtrack-
ing search.
More complex examples, including the search for
subtrees with restrictions on the domain reduction and
solution density, are given in Section 5.
Since the original problem CSP P is an FD-CSP,
it is ensured that all search trees of P are finite. Thus,
the number of search tree nodes and their concern-
ing properties is finite as well. However, in practice,
we do not know in advance, the concrete nodes of a
proper search tree nor their property values because a
search tree is generated dynamicall during the evalu-
ation of the original problem CSP P. Thus, while we
are able to formulate the needed variables and con-
straints on them for the filter CSP F, we cannot pro-
vide their property values in advance. In this way,
the filter CSP F is initially incomplete. During search
additional constraints for defining the property values
of the nodes must be added to F. This is discussed in
more detail in the following section.
4 FILTER IMPLEMENTATION
The Visual Constraint Solver (VCS) is a tool for the
visualization of FD-CSPs and their evaluation, devel-
oped at BTU Cottbus-Senftenberg in a series of bach-
elor/master theses (Buckenauer, 2019; Reda, 2020;
Bels, 2022). As input, VCS takes MiniZinc programs
which specify CSPs. MiniZinc (Stuckey et al., 2020;
MiniZinc, 2022) is a high-level, solver-independent
constraint modeling language whose constraint mod-
els are compiled via the intermediate language Flat-
Zinc into other constraint programming languages
such as Choco (Choco, 2022). Choco is a Java li-
brary for constraint solving and it is used inside VCS
to solve FD-CSPs.
Filter models (as described in Section 3) are our
new extension of VCS. Observe, that they are just
CSPs on search tree nodes and their properties. Thus,
the main idea of their implementation is to represent
them by constraint models and to handle them by con-
straint solvers. This yields an extended workflow:
Filter models are defined just like problem CSP
models using MiniZinc. They are as well compiled
into a Choco constraint model F
choco
via FlatZinc.
When the original problem CSP P
choco
is solved by
the Choco solver, additional information about the
nodes and node properties is collected and used to ex-
tend the Choco filter model. The resulting enhanced
filter constraint model F+
choco
is again solved by the
Choco solver. Its solutions are used to enhance and
decorate the visualization of the solutions of P
choco
in
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
224

1 i nc lu de " all dif fe ren t . m z n ";
2 int : n = 5;
3 % n is the nu m be r of quee ns
4 a rra y [1.. n ] of var 1. . n : q ;
5 % quee n in colu mn i is in row q [i ]
6 co ns tr ain t al l dif fer e nt ( q);
7 % all que en s in dis ti nc t ro w s an d
...
8 co ns tr ain t al ld iff e ren t ([ q [i] + i |
i in 1. . n ]) ;
9 co ns tr ain t al ld iff e ren t ([ q [i] - i |
i in 1. . n ]) ;
10 % ... di st in ct d ia gon a ls
11 s olv e sa ti sf y ;
Listing 1: A MiniZinc model of the 5-queens problem.
1 var int : n_id ;
2 var int : n _i sSo lu tio n ;
3 co ns tr ain t n_ i d <= 3 0 ;
4 co ns tr ain t n_ is Sol u tio n = 1;
5 s olv e sa ti sf y ;
Listing 2: A filter for all solutions within the first 30 nodes
visited during backtracking search.
the VCS tool by highlighting node sets satisfying the
filter CSP.
1
Listing 1 gives an example of a MiniZinc CSP
model. It specifies the 5-queens problem CSP P =
(X, D,C) from Example 1. After an import of the
global alldifferent constraint from the MiniZinc
libraries (Line 1), the variables q[1] to q[5] (orga-
nized in an array) with their domain values 1 to 5
(Lines 2,4) are defined. In Lines 6-9 the constraints
of set C are given as above. Line 11 initiates the solu-
tion process.
The script in Listing 2 is an example of a filter
model in MiniZinc which corresponds to Example 3.
It declares a search node n with unique identifier n id
and property n isSolution. The constraints ensure
that the desired node is a solution (n isSolution =
1) and is visited within the first 30 nodes (n id <=
30). The last line instructs the solver to search for
a solution that satisfies all constraints. Notice, that
properties must always be given in conjunction with a
filter node index and may require to specify an associ-
ated variable in addition to that (here n isSolution).
Visualization of Filter Results. When assessing a
CSP and its solution process using VCS the user can
load problem CSPs P and filter models F. Besides
1
If there are no nodes satisfying a filter model, the
search tree is shown by VCS just as before and without ad-
ditional decorations.
he can choose between variable and value ordering
heuristics provided by Choco. The problem CSP can
be solved step-wise and filter models can be applied
interleaved.
Figure 3 shows a cut-out of the search tree of the
5-queens CSP from Example 1 and Listing 1 in VCS.
We used the filter given in Listing 3 (to be explained
in Section 5 in more detail). This filter model identi-
fies parts of the tree with a solution density (cf. Defi-
nition 4) of at least 50%.
In the shown case, the search tree nodes with in-
dices 16-22 include 4 leafs, where 2 of them (nodes
17 and 19) are solutions (solution density is 50%).
Green nodes represent solutions of the problem
CSP P, red nodes stand for failing subtrees. Yellow
coloured nodes represent a filter result. It is possi-
ble to switch step-by-step between the several filter
results, here subtrees satisfying the filter model. The
user of VCS can assess the filtered node data by click-
ing on a search tree node. Then a window opens
and shows the node properties, e.g. at node 17 we
see a solution of the 5-queens problem. (Notice, the
X INTRODUCED i variable names result from the Flat-
Zinc conversion of the queens array inside VCS and
stand for the queens q
i+1
, i.e. X INTRODUCED 0 for
q
1
, X INTRODUCED 1 for q
2
and so on).
5 APPLICATION EXAMPLES
Now, let us consider further examples of filter scripts
which shall help to asses search heuristics. They are
written in MiniZinc as before and provided as input
for VCS together with a problem CSP P.
Listing 3 shows a filter specification for subtrees
with a high solution density according to Definition 4.
In Lines 1 and 6, two search tree nodes n1 and n2
are declared. Node n1 is the root of the to be filtered
subtree, node n2 the subtree’s rightmost leaf. For the
actual definition of the filter criterion in Line 20, we
need certain node properties gained with the code in
the Lines 2-5 and 7-12. Lines 15-19 specify the sub-
tree structure (for the meaning of n
lastLeftParIdx
and n isLeft see the node properties f and g in Sec-
tion 3), mainly by stating that n1 must be the root
of a subtree and n2 must be a descendant of n1 and a
right-most leaf node (a solution or contradiction). The
value of n leafs is the number of leafs (solutions and
fails) visited so far during the search process. Prop-
erty n solutions gives the number of solutions seen
so far in the search process. The filter criterion of a
high solution density is defined in Line 20, where we
use a density threshold of 50% (Line 13). Line 21
initiates the solution process, i.e. the filter evaluation.
Constraint-Based Filtering and Evaluation of CSP Search Trees
225

Figure 3: Filtering a search tree for subtrees with a solution density of at least 50%.
1 var int : n1 _ id ;
2 var int : n 1_l ast Le ft P arI dx ;
3 var int : n 1_ is Le ft ;
4 var int : n 1_ le af s ;
5 var int : n 1_ sol ut ion s ;
6 var int : n2 _ id ;
7 var int : n 2_l ast Le ft P arI dx ;
8 var int : n 2_ is Le ft ;
9 var int : n 2_ le af s ;
10 var int : n 2_ sol ut ion s ;
11 var int : n 2_ isS olu ti on ;
12 var int : n 2_i sCo ntr ad ic t io n ;
13 int : pctg = 50;
14 % min im um s o luti on p er cen ta ge
15 co ns tr ain t n 1_i d < n 2_i d ;
16 co ns tr ain t n 2_i s Lef t = 0;
17 co ns tr ain t ( int_ eq ( n1_ id ,
n2 _la st Le f tPa rId x ) \/
18 ( n1_ is Lef t = 0 /\ i nt _e q (
n2 _ last Le ftPa rI dx ,
n1 _la st Le f tPa rId x )) );
19 co ns tr ain t (( n 2_i sS olu ti on = 1) \/
( n 2 _i s Con tra dic tio n = 1) );
20 co ns tr ain t ( n2 _ sol ut ion s -
n1 _s olu ti ons ) * 100 di v (
n2 _ le afs - n 1 _l eafs ) >= pctg ;
21 s olv e sa ti sf y ;
Listing 3: Filtering subtrees with high solution density.
Listing 4 is a filter for finding nodes which per-
form a strong domain reduction. First, in Lines 1 and
3, the tree nodes n1 and n2 are declared. The property
n
X INTRODUCED 2 dom provides the domain size of
a variable X INTRODUCED 2 when node n is reached.
The index of the parent node of a node is specified by
1 var int : n1 _ id ;
2 var int : n 1_X _IN TRO DUC ED_ 2_d om ;
3 var int : n2 _ id ;
4 var int : n 2_ par en tI d ;
5 var int : n 2_X _IN TRO DUC ED_ 2_d om ;
6 int : pctg = 30;
7 co ns tr ain t i nt _e q ( n 2_ p ar e nt Id ,
n1_i d ) ;
8 co ns tr ain t 100 - (
n2 _X_ INT ROD UCE D_2 _do m * 1 0 0 div
n1 _X_ INT ROD UCE D_2 _do m ) >= pc t g ;
9 s olv e sa ti sf y ;
Listing 4: Filtering subtrees with a strong domain reduction.
n parentId. The constraint in Line 7 ensures that n1
is the direct parent node of node n2. In Line 8 the cri-
terion of domain reduction is determined according to
Definition 5 and compared against a certain threshold
value (here 30%, Line 6).
The extension of VCS by our new node filter-
ing mechanism allows to debug and analyze search
heuristics in detail. When the user wants to com-
pare two search trees (and thus get insights about dif-
ferences of search heuristics), he can define problem
oriented criteria based on node properties, solve his
problem CSP P and filter the search trees by the filter
criteria defined in a filter CSP F. VCS supports a vi-
sualization of the filtered node sets and subtrees and
provides further data on the tree nodes including the
node properties.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
226

6 CONCLUSION
In this paper we introduced a new method for the as-
sessment and comparison of search heuristics at the
evaluation of FD-CSPs. For this, we define filter
model CSPs, which describe criteria to filter subtrees
of search trees with specific properties. The com-
parison and systematic analysis of CSP search trees
can help to understand the preconditions for good
and successful heuristics for specific applications and
in general and may help to improve dynamic search
heuristics. At this, our main observation was that such
filters for search trees are themselves just again CSPs.
Thus, we realized a method to define filter CSPs and
to handle these by a constraint solver which makes
our method very flexible.
Our new method was integrated into the Visual
Constraint Solver tool, which allows to present CSPs
and the solution process interactively, step-by-step
through a suitable visualization. With the extension
by filter models, VCS now became a tool for debug-
ging CSPs, comparing search strategies, and under-
standing search in detail.
Future Work. Currently, VCS is in a prototypical
implementation state; in the future we will further im-
prove and optimize this tool, its workflow and expand
its application area. Considering the implementation
of the filtering feature, improvement is needed for
handling large CSPs with high numbers of variables
and constraints together with (more complex) filters.
This combination yields a growth of constraints and
data and can quickly become a memory bottleneck.
We need to investigate ways of handling this prob-
lem, e.g. by more appropriate data structures, internal
constraint representations, and early node set pruning.
Another direction of future work is to provide the
user with descriptions of tree patterns for an easier
specification of filter CSPs (e.g. for the a pattern for
subtrees like Lines 15-19 in Listing 3).
Furthermore, currently only the predefined search
heuristics of the Choco solver are taken into consid-
eration as search heuristics. An extension of our ap-
proach to other search strategies like domain splitting
is desirable.
REFERENCES
Bels, M. (2022). Evaluation und Visualisierung von
Entscheidungsb
¨
aumen und Variablen- und Wer-
tauswahlheuristiken im Visual Constraint Solver.
Bachelor Thesis, BTU Cottbus-Senftenberg.
Buckenauer, D. (2019). Redesign des Tools Visual Con-
straint Solver (VCS). Bachelor Thesis, BTU Cottbus-
Senftenberg.
Choco (2022). Choco - an open-source java library for con-
straint programming. https://choco-solver.org/. last
visited 2022-10-14.
Dechter, R. (2003). Constraint Processing. Elsevier Mor-
gan Kaufmann.
Li, X. and Epstein, S. L. (2010). Visualization for structured
constraint satisfaction problems. In Visual Represen-
tations and Reasoning, Papers from the 2010 AAAI
Workshop, Atlanta, Georgia, USA, July 11, 2010.
AAAI.
Mak, A. (2022). Constraint graph visualization. http:
//users.cecs.anu.edu.au/
∼
anthonym/cgv.pdf. last vis-
ited 2022-10-14.
Marriott, K. and Stuckey, P. (1998). Programming with
Constraints. An Introduction. The MIT Press.
MiniZinc (2022). The constraint modeling language mini-
zinc. https://www.minizinc.org/. last visited 2022-10-
14.
Reda, A. (2020). Visualisierung von Arrays in
Constraint-Satisfaction-Problemen. Master Thesis,
BTU Cottbus-Senftenberg.
Simonis, H., Davern, P., Feldman, J., Mehta, D., Quesada,
L., and Carlsson, M. (2010). A generic visualiza-
tion platform for CP. In Cohen, D., editor, Principles
and Practice of Constraint Programming - CP 2010,
volume 6308 of Lecture Notes in Computer Science,
pages 460–474. Springer.
Sinz, C. and Dieringer, E. (2005). Dpvis - A tool to visual-
ize the structure of SAT instances. In Bacchus, F. and
Walsh, T., editors, Theory and Applications of Satis-
fiability Testing - SAT 2005, volume 3569 of Lecture
Notes in Computer Science, pages 257–268. Springer.
Stuckey, P. J., Marriott, K., and Tack, G. (2020). Mini-
Zinc Handbook. https://www.minizinc.org/doc-2.6.3/
en/index.html, last visited 2022-10-14.
van Beek, P. (2006). Backtracking search algorithms. In
Rossi, F., van Beek, P., and Walsh, T., editors, Hand-
book of Constraint Programming, chapter 4, pages
85–134. Elsevier.
Constraint-Based Filtering and Evaluation of CSP Search Trees
227
