Head Star (H*): A Motion Planning Algorithm for Navigation Among
Movable Obstacles
Halim Djerroud
ESIEE Paris, Gustave Eiffel University, France
Keywords:
Motion Planning, Navigation Among Movable Obstacles, Bug Algorithms.
Abstract:
The objective of Navigation Among Movable Obstacles (NAMO) is to optimise the behaviour of robots by
giving them the ability to manipulate obstacles. Current NAMO methods use two planners, one for moving
through open spaces and a second for handling obstacles. However, these methods focus on providing a
solution for obstacles handling and neglect movement in free spaces. These methods usually assume using
classical obstacle avoidance algorithms for moving in free spaces. However, they are not suitable for the
NAMO. This paper proposes a new path planning algorithm Head Star (H*) adapted for NAMO in free spaces.
It is inspired by Bug’s algorithms by adding a graphical representation and heuristics on the distances allowing
it to bring the robot as close as possible to its goal while keeping in memory the areas already visited.
1 INTRODUCTION
Designing a robot that can navigate in a congested
environment and move obstacles in its path is a
field that roboticis have been interested in for sev-
eral decades, known as Navigation Among Mov-
able Obstacles (NAMO) (Stilman and Kuffner, 2005).
NAMO is an important area of research in motion
planning in congested environments, as it gives mo-
bile robots a better ability to reason about the envi-
ronment and the possibilities of choosing which ob-
stacles to manipulate, in order to make their way
through (Charalampous et al., 2017). NAMO thus
makes it possible to solve problems that are difficult
or even impossible to solve with a conventional ob-
stacle avoidance methods.
Current work in the NAMO field can be divided
into two broad categories: off-line planning and on-
line planning (Moghaddam and Masehian, 2016; Re-
nault et al., 2019). Offline planning assumes that all
the information of the space in which the robot is
moving is known in advance, while in contrast to on-
line planning, the robot has only partial knowledge of
its environment, and it can modify its initial plan ac-
cording to new information acquired during its move-
ment. In most previous work that has focused on of-
fline NAMO, the results show that this approach is not
effective. The current trend is towards online NAMO,
which seems to be more promising and better suited.
There is not much work on online NAMO, but the
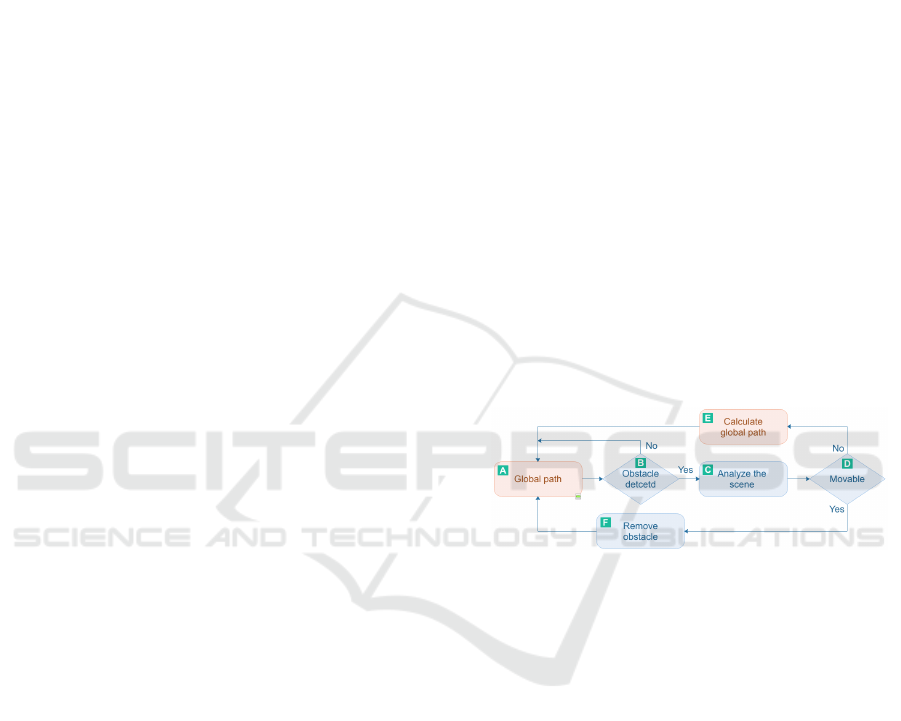
Figure 1: Overview of a method for solving NAMO: (A)
From a map of the environment the algorithm first calcu-
lates a collision-free path to its goal. (B) During the execu-
tion of this path, the robot continuously searches for obsta-
cles not recorded in the map that may block its path. (C) If
such an obstacle is detected, the robot initiates a scene anal-
ysis to determine the mobility of the obstacles. (D) In case
the obstacle is not removable, then (E) the robot re-plans its
path. Otherwise (F) the robot removes the obstacle.
article (Renault et al., 2019) gives an almost exhaus-
tive list of algorithms with a classification according
to the type of NAMO used. The approaches online
are those whose mobility is not given in the Table 1 in
(Renault et al., 2019)
In most of the approaches the authors use two
planners, one for the movement in free spaces to cal-
culate an optimal path and a second one for the han-
dling of obstacles. According to our knowledge the
set of proposed approaches focuses on the operation
of the planner that handles obstacles. For what con-
cerns the global planner that allows to compute a path
in free spaces the authors only assume that those plan-
ners uses a motion planning classical algorithm. This
Djerroud, H.
Head Star (H*): A Motion Planning Algorithm for Navigation Among Movable Obstacles.
DOI: 10.5220/0011637200003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 211-219
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
211

article seeks to resolve this lacking by proposing an
alternative path planning algorithm for NAMO.
In order to illustrate how the two planner meth-
ods work, we propose the diagram in Figure 1 which
proposes a method for solving NAMO whose objec-
tive is to lead the robot to a determined position by
manipulating the obstacles that hinder its passage. In
this method two planners are assumed, the first one
(red rectangles) allows movement in free spaces. The
second one (blue rectangles) allows the management
of obstacles. In this proposal, the method consists of
bringing the robot as close as possible to its objective.
If a non-removable obstacle is in the proposed path
then a new path is calculated.
In order to achieve an efficient global planner we
believe it is important to use a path calculation algo-
rithm adapted to NAMO, because classical planning
algorithms will try to find a path assuming that all ob-
stacles are impassable. In the case of NAMO with a
global planner, to calculate an optimal path it is nec-
essary to try to bring the robot as close as possible to
its objective, even if it means finding itself in a block-
ing position, as long as the local planner can unblock
the situation by moving the obstacles.
In this paper we propose a motion planning algo-
rithm adapted for NAMO. The objective of this algo-
rithm is to bring the robot as close as possible to its
goal to allow an obstacle manager to remove obstacles
that hinder the passage. The algorithm also allows a
new path to be calculated quickly and taking into ac-
count the areas already explored in the event that the
local planner fails to find a solution in the event of a
blockage.
In the following we will describe the existing mo-
tion planning algorithms and show the limitations of
these algorithms for NAMO. Afterwards we will pro-
pose a motion planning algorithm for NAMO under
the name of HeadStar (H*). Then, we will show the
experiments carried out prior to concluding.
2 OVERVIEW OF MOTION
PLANNING METHODES
Motion planning is an important step to address
NAMO problem. It allows the robot to find a se-
quence of valid configurations which allow it to move
from a start position A to reach a goal B even if this
means finding itself in a blocked position.
In conventional navigation, all obstacles are as-
sumed to be impassable. This problem is known in
robotics under the term of motion planning. Histori-
cally, it was described in (Eiben and Kanj, 2017) also
called piano movers problem. It stipulates that if a
robot in an initial position and orientation wants to
move towards a final position and orientation, there
must be at least one valid path between these two po-
sitions. A movement is said to be valid if it is car-
ried out completely without collision. Motion plan-
ning, therefore, consists in finding a valid trajectory
between two positions. A motion planning method
must: either generate a movement such that the robot
can reach the final position without colliding with ob-
stacles, or conclude that such a movement is impossi-
ble.
Motion planning algorithms, described in
(LaValle, 2006) are divided into two main classes:
(1) deterministic methods, also called exact methods,
which make it possible to find the same path at each
execution for a given configuration of the environ-
ment. (2) Probabilistic methods, also called sampling
methods, on the other hand, can find different paths
for the same initial conditions, but they guarantee
finding a solution if it exists, or to determine that a
solution is definitely nonexistent.
The solutions provided by the first class of algo-
rithms are based on the topology of the free spaces
called also configuration spaces, in order to build a
graph. So they consist in reducing the problem to a
simple path finding in a graph. The technique takes
place in two steps: The first consists of construct-
ing a graph conforming to the configuration space.
The second step uses algorithms for finding paths in a
graph, for example: Di jkstra, A∗, Bellman, D ∗Lite,
etc. As for the step of construction of the graphs, it is
based on a cells division method.
Among these techniques of cell division, one of
them consists of dividing the configuration space into
a set of square cells. In this technique it is considered
that each cell is linked to the eight neighbouring cells.
All the cells can be represented in the form of a graph.
The cells represent the nodes, and the passages from
one cell to another are represented by weighted edges
as follows: The passages from one cell to another ver-
tically or horizontally is weighted at 1, diagonal pas-
sages are weighted at
√
2. If the cell represents an ob-
stacle, then the edges towards this cell are weighted
to infinity.
The methods presented here (the list is not exhaus-
tive, we have only cited the most widespread methods
involved in this article) are so-called exact methods;
they have the advantage of working well for a robot
in the configuration space C = R
2
. They are generally
based on graphs, so it is easy to calculate the prop-
erties (example: the shortest path, the total cost, etc.)
They also offer certain theoretical guarantees (com-
pleteness, limits on the execution time, etc.) But these
methods are only used when the environment and the
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
212

obstacles are known (or partially known on condition
that certain algorithms such as D ∗Lite (Koenig and
Likhachev, 2002) are used for example) in advance
and can be very slow if the number of dimensions is
greater than two.
Another category of algorithms, called probabilis-
tic algorithms, is based on the use of randomness to
construct a connected graph in a configuration space,
thus allowing it to be freed from an exact represen-
tation of the environment. These methods perform
a random search in free space until the desired fi-
nal configuration is reached. Among these methods
we find the Probabilistic Roadmap Approach (PRM)
(Chen et al., 2021). As previously, the technique con-
sists of two phases. The first phase in the construction
of a graph (this phase is called learning phase) and
the second, (called research phase), consisting of the
search for a path in this graph. The graph represents
the free space. To ensure a total exploration of the
free space, each node of the graph is drawn randomly
according to a uniform distribution. Each time a node
is randomly pulled it is verified as to whether or not
there is a straight line without collision with the nodes
closest to the graph, which respects the constraints of
the mobile. If this condition is verified, then we add
this new node to the graph and connect it to the clos-
est nodes. There are several variants of this algorithm.
Among them, Rapidly exploring Roadmap Random
Trees (RRT) (LaValle et al., 1998; Kalpitha et al.,
2020), which is based on the same technique but al-
lows convergence more quickly by choosing only the
nodes which are relevant to the solution of the prob-
lem, resulting in the reduction of computation time.
From the initial position of the mobile, a tree is suc-
cessively constructed by successive integration of the
nodes. To create a new node, we generate a random
sample of the configuration space that we will call
rand using a random distribution to maximise explo-
ration. The near node closest to rand is determined,
and a new candidate configuration new then produces
a segment joining near to rand, at a distance prefixed
δ from near. Finally, we check that the segment from
near to new is collision-free. If this condition is true,
we add new to the graph and connect it with a segment
near to new.
Another class of algorithms, which allows robots
to blindly navigate in mapless environments, is com-
monly known as Bug Algorithms (BA). As the name
suggests, they have a biological origin. They are
based upon techniques inspired by the movement of
insects. A description and comparison of a wide vari-
ety of these algorithms can be found in the following
articles : (McGuire et al., 2019) (Sivaranjani et al.,
2021). The principle of these algorithms is that they
do not know the position of the obstacles in their en-
vironment, nor the relative position of the goal to be
reached. They will react locally only to contact with
obstacles and walls which constitute their immediate
environment so as to allow the robot to progress to-
wards its objective by following the limits of the ob-
stacles and walls. The nature of these algorithms is
ideal for indoor navigation, where the map of the en-
vironment is not known in advance, and/or the struc-
ture of the environment is constantly changing. The
Bug Algorithms are based on the following criteria:
(1) Unlike many planning algorithms, which assume
a global knowledge of the environment, these algo-
rithms assume only a local knowledge of the environ-
ment and a global objective. (2) Their behaviour is
straightforward: (a) follow the contours of obstacles
(b) move in a straight line towards the objective. (3)
The range of the sensors is limited and admits a cer-
tain range of uncertainty of the final position. The
typical behaviour of Bug Algorithms is to move in a
direct line whenever possible, until reaching the goal.
In case the mobile meets an obstacle it follows the
contour of the obstacle until it is possible to go in a
straight line towards the goal.
Among the simplest algorithms, we find the Com
(Lumelsky and Stepanov, 1986) algorithms they have
been qualified by the authors of (McGuire et al., 2019)
as common sense algorithms and they have abbrevi-
ated them under the acronym Com. The idea is to
move in a direct line whenever possible, until waiting
for the goal. In case the mobile meets an obstacle then
it follows the contour of the obstacle until it is possi-
ble to go in a straight line towards the goal. The first
point of contact with the obstacle is called hit-point,
and the point where the mobile leaves the outline of
the obstacle to go in a straight line towards the goal
is called leave-point. This algorithm can solve sev-
eral situations, but the authors show some problem-
atic cases shown in Figure 2 (a). To solve the prob-
lem posed by Com the authors suggest the Bug1 al-
gorithm which proposes to explore the totality of the
obstacle while keeping the last point leave-point in
its memory as shown in Figure 2 (b). However Bug1
generally proposes a path for this, the authors propose
an optimized version of this algorithm, named Bug2
whose idea consists in drawing an imaginary line M-
line between the starting position and the goal. Bug1
explores the obstacle but this time, until we encounter
the M-line, this situation is illustrated in Figure 2 (c).
In the same article, (Sankaranarayanan and
Vidyasagar, 1990) the authors, evince that there are
still cases where Bug2 proposes unoptimised and very
long paths. They consider that the main cause comes
from the fact that the algorithm does not store the
Head Star (H*): A Motion Planning Algorithm for Navigation Among Movable Obstacles
213

Figure 2: Behaviour of different Bug Algorithms. Here, the
environment configuration is chosen to show typical cases,
in some cases algorithms may be favoured over others or
vice versa. (This Figure is taken from the article (McGuire
et al., 2019)).
points visited previously during the contour of the ob-
stacles. For this, the authors propose an algorithm
based on Bug2 under the name of Alg1. Its principle
is to change the direction of the contour following,
if the mobile encounters a hit-point already visited
(see 2 (e)). The authors also developed another ver-
sion of this algorithm under the name of Alg2. The
idea consists in adding an M-line, which allows in
certain cases to optimize the trajectories (see Figure
2 (f)). Also, in the same article the author proposes a
new version of the Com algorithm named Com1, the
idea consists in memorizing the distance of the last
reference point leave-point compared to the goal (see
Figure 2 (d)).
DistBug is an algorithm described (Kamon and
Rivlin, 1997). It is similar to Alg2 except that it
only keeps in memory the last position of hit-points,
which makes it more efficient at the memory level.
Another aspect that characterizes DistBug is that it
does not impose a direction of bypassing obstacles, it
is always done in the direction of the M-line, as il-
lustrated in Figure 2 (g). In some configurations this
strategy fails completely.
In the (Horiuchi and Noborio, 2001), authors pro-
pose two algorithms Rev1 and Rev2 (see Figure 2
(h) and (i)). Here, the strategy consists in alternating
the direction at each leave-point to follow a trajectory
that looks like a slalom. The idea behind this strategy
is to change direction if the mobile passes the same
point, which increases the chances of finding a path.
More recently, (Lentzas and Vrakas, 2020) de-
scribed the LadyBug algorithm. The algorithm uses
a Received Signal Strength Indication (RSSI) of an
electromagnetic signal to detect its position in regard
to signal source. The algorithm is able to accurately
calculate the position of the beacon emitting said sig-
nal. The algorithm is based on two functions: Locali-
sation and Navigation. The algorithm is able to locate
the source of an electromagnetic signal and navigate
to it.
We have described how a few insect-inspired al-
gorithms work, but there are many more. The Bug
Algorithms shown here are generally suitable for en-
vironments such as labyrinths, they are poorly suited
for mobile robots able to see far ahead (without hit-
ting obstacles). Because in an environment where it
is possible to see far ahead, this information can be
used to improve its trajectory. Moreover, these algo-
rithms are not capable of accurately remembering the
places already visited.
3 THE LIMITS OF THESE
ALGORITHMS FOR NAMO
The first algorithms described here are based on total
or partial knowledge of the environment to calculate
paths. It is obvious that these techniques cannot be
used if one considers that the environment changing
after moving obstacles as in the NAMO environment.
In addition, these algorithms do not work immedi-
ately, they rely on techniques such as SLAM (Kol-
hatkar and Wagle, 2021) to get the map of the envi-
ronment.
SLAM techniques consist in exploring the envi-
ronment to build a map, then the produced map is
used to calculate an optimal path between two posi-
tions with using path finding algorithm. In the case
of an environment with a lot of obstacles, generate
a lot of gray areas
1
, it is obvious that most of the
mapped regions are not used when calculating an op-
timal path between two positions. In fact, this tech-
nique unnecessarily explores certain regions. More-
over, in the case of a dynamic environment, the con-
structed map quickly becomes obsolete, if the obsta-
cles change place. In the context of an environment
with many obstacles, this technique proves to be un-
suitable in the event that certain areas are not accessi-
ble.
In the case of Bug Algorithms, it is true that the
1
Areas where you have to bypass the obstacle to map
the environment (behind obstacles, places inaccessible by
obstacle avoidance, etc.)
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
214
mobiles are immediately operational and do not re-
quire a preliminary exploration of the environment.
But in certain configurations of the environment (in
question of the local minima
2
) these algorithms can
lead to these cycles (go through the same path) be-
cause they do not memorise the configuration of the
environment already explored. In addition, these al-
gorithms do not offer any path improvement in the
case where the mobile has to redo the same path al-
ready taken before. In addition, these algorithms are
not based on metrics or heuristics, which makes it dif-
ficult to use path search algorithms such as D∗ or oth-
ers. The Bug Algorithms try to find trajectories in a
straight line towards the objective, but do not memo-
rise the places already explored.
We believe that it is important to propose a plan-
ner for NAMO that benefits from the advantages of
both approaches. Namely, to move directly towards
the objective and rely on the local planner to solve the
obstacles that lie ahead. Otherwise, quickly recalcu-
late a path (as straight as possible towards the goal)
without returning to the areas already explored.
In the next section, we propose an algorithm that
merges the two approaches. It allows the robot to go
straight, in case an obstacle blocks its path, then it cal-
culates a new path (based on a heuristic) that allows
it to move away from the obstacle while approaching
its goal. It also keeps track of the areas visited later
so that it does not have to re-explore in the event that
a path is not found in the direction taken.
4 HEAD-STAR ALGORITHM (H
∗
)
The HeadStar algorithm noted (H
∗
), is halfway be-
tween bug algorithms and heuristic path search algo-
rithms. It uses only a single heuristic
3
f (x) = h. Like
bug algorithms, H
∗
does not previously have a map of
the environment. To explore its environment, it must
move around. The mobile has a sensor with a cer-
tain range. Like the classic path finding algorithms,
H
∗
uses heuristics to optimise navigation paths and
avoid unnecessary explorations. The H
∗
algorithm
uses cell division to represent its environment. The
sensor range is shown with white cells; grey cells
2
The problem of the local minima occurs when a mobile
navigating without a priori knowledge of the environment is
trapped in a loop. This occurs especially if the environment
consists of concave obstacles, labyrinths, etc. To get out
of the loop, the robot must understand its repeated crossing
through the same environment, which involves memorising
the environment already explored.
3
Here the heuristic is calculated using Euclidean dis-
tance, other calculation methods are possible such as Man-
hattan distance, Chebyshev distance, etc.
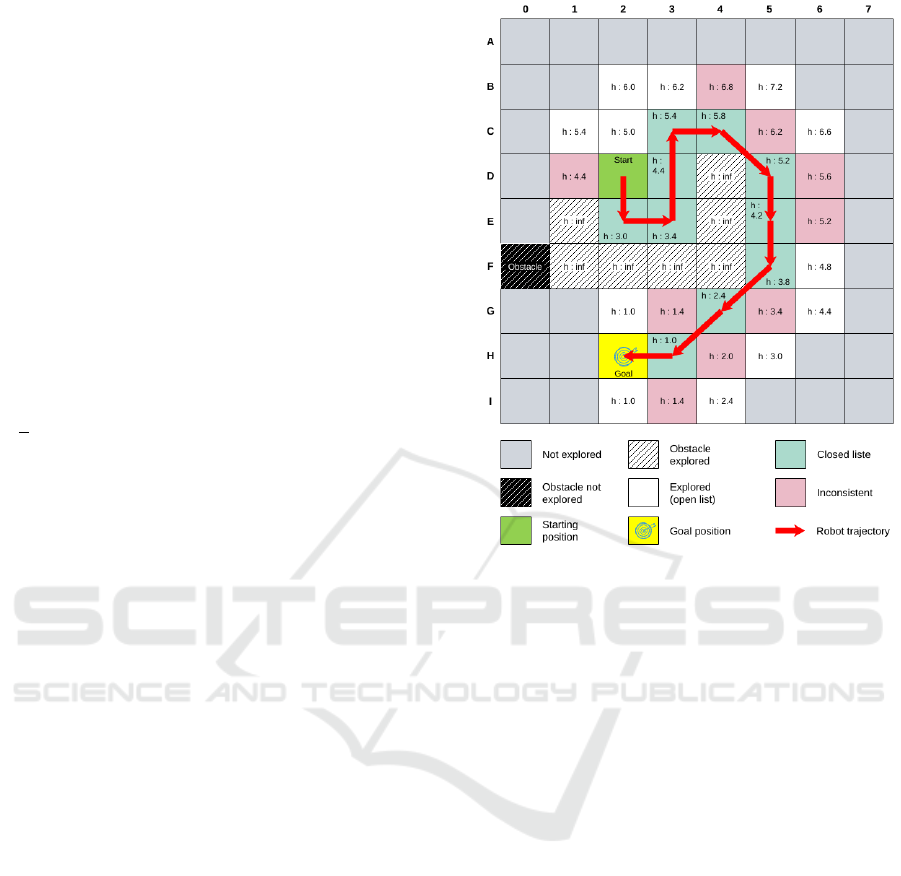
show unexplored areas (see Figure 4), obstacles are
shown with hatched cells. The heuristic is calculated
with respect to the goal cell.
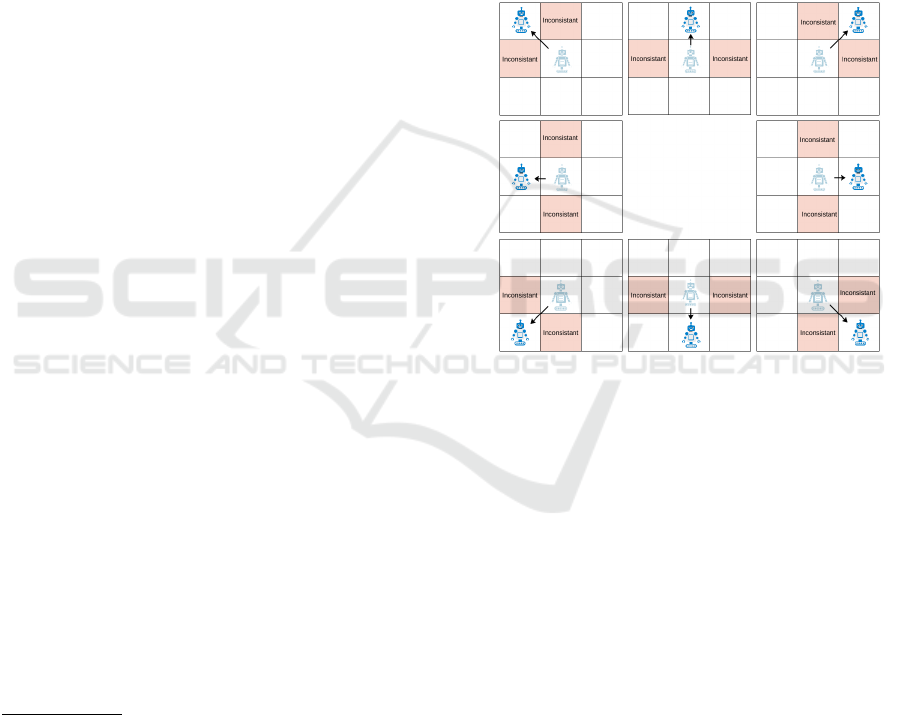
To prevent the algorithm from spreading in width
and to force it to go forward, or to follow the con-
tours, we have introduced the notion of inconsistency.
A cell marked inconsistent will not be explored as
long as there are cells in the open list. The choice
of inconsistent cells is made when moving from one
cell to another. Horizontally and vertically, the mo-
bile marks the cells adjacent to the starting square. In
diagonal displacement, we mark the cells adjacent to
the transition. The different cases are illustrated in
Figure 3.
Figure 3: How to determine inconsistent cells.
H
∗
uses priority queues to store nodes (cells) to be
visited, and a stack to store nodes already visited. The
priority queues are ordered according to f (x) = h; if
two elements have the same value then we use g as
discriminant f (x) = h + g. h is the estimate of the
distance between this position and the goal, g is the
distance between the mobile and this position. The
different lists used by the algorithm are as follows:
• Open list: priority queue (ordered by h, g + h)
stores newly discovered vertices.
• List inconsistent: priority queue (ordered accord-
ing to h, g + h) stores inconsistent vertices.
• Closed list: a stack which stores the vertices al-
ready visited.
From the starting position, H
∗
inserts the starting
cell in the open list to initiate the process. As long as
the open list and inconsistent list are not empty, we
repeat the following process: We calculate the heuris-
tics of the adjacent cells, and we insert them into the
priority list, open list (if they are not already in one
of the two lists). We remove the first element of the
Head Star (H*): A Motion Planning Algorithm for Navigation Among Movable Obstacles
215
open list. If this list is empty, then we remove the
first position in the list inconsistent, and we move to
this position if the displacement is direct (only one
cell displacement). If not, we recall the algorithm re-
cursively (the lists are defined in the stack; during the
recursive call, the lists are emptied and find their con-
tent when unstacking). During the displacement (in
the case where the displacement is of only one cell),
we insert the visited position in the list closed and we
calculate the inconsistent positions and insert them in
the list inconsistent, each time taking care to remove
the positions in their initial lists. The algorithm ends
if it reaches the goal or after both list open and list
inconsistent are empty. This algorithm is described in
the Algorithm 1.
The function GetNeighbors(s) returns a list of
adjacent cells that are not obstacles. A cell is said
to be adjacent s
0
if and only if the distance g (distance
between the cells s and s
0
) is of a single cell: g(s,s
0
) ≤
√
2 and h(s
0
) 6= ∞.
The function MinCell(OPEN, INCONS,
S
goal
) returns the smallest element in the open list.
If the list is empty then it looks for the smallest
elements in inconsistency list.
4.1 Illustration of H
∗
Figure 4 shows how H
∗
works. We start by adding
the starting position (D2) in the open list, we calcu-
late the Euclidean distance to the objective on the ad-
jacent cells, we assign an infinite value to the impass-
able cells and we add them to the open list (only cells
with h 6= ∞). We move in the cell with a minimum
h (E2) and note the cells (D1 and D3) as inconsistent
(add these two cells in list inconsistent and remove
them from the open list). When we move into a cell,
we remove it from the two lists (open list and incon-
sistent list) and put it in closed list. The next cell with
h minimum in the open list is (E3), so we move to
this cell directly (in this case the algorithm makes a
recursive call and starts again as the starting position
(E3) and arrival position C3). As long as the open list
is not empty, we continue the same process. If the
open list is empty then we look to see if there are any
elements left in inconsistent list.
5 EXPERIMENTS AND RESULTS
Here, we will compare the H
∗
algorithm to the D
∗
Lite
and A
∗
algorithms. Results are obtained statistically
using 3000 ×26 tests. The number of obstacles starts
at 0 and goes up to 300 obstacles on a surface of 20 ×
20. The number of obstacles is gradually increased in
Figure 4: Sample case.
increments of 10 every 3000 attempts. Beyond 300
obstacles on a surface of 20 ×20, or a density of 0.75,
it becomes difficult to find a path between the starting
position and the finishing position.
We wish to emphasize that H
∗
must move to
explore its environment, unlike the algorithms with
which we compared it. To make a fair comparison,
we have assigned tests assuming that D
∗
Lite has no
prior knowledge of its environment. Technically, this
operation is carried out by generating the obstacles af-
ter the ComputePath() function. Figure 6 (A) graph
shows equivalent performance—in terms of distance
traveled— (slightly in favor of H
∗
). But D
∗
Lite is not
able to work in an environment where the goal is not
known in advance or where the goal is moving. This
explains why H
∗
travels a greater distance.
The graph in Figure 6 (B) shows a comparison of
the three algorithms in terms of distance, execution
time and nodes in open list. We notice that D
∗
Lite is
time consuming when the number of obstacles is low.
This is due to the fact that many nodes are found in the
open list (as we can see in 6 (C)), and the key calcu-
lation is based on two criteria (in the implementation
used here, the open list is implemented in a dictio-
nary, the key being a pair of integers indicating the
abscissa and the ordinate of the cell. The value is
composed of a pair of doubles <min(g(s),rhs(s)) +
h(s
start
,s),min(g(s),rhs(s)) >. The process of get-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
216
Algorithm 1: Algorithme HeadStar.
1: function COMPUTEPATH(S
start
,S
goal
,Path)
2: OPEN ←
/
0
3: INCONS ←
/
0
4: CLOSE ←
/
0
5: s ← S
start
6: OPEN.insert(s)
7: while OPEN.size() /∈
/
0 or INCONS.size() /∈
/
0 do
8: ADDTOCLOSELIST(s,OPEN,INCONS,CLOSE)
9: Path.insert(s)
10: if s = S
goal
then
11: return True Path found
12: end if
13: for all s
0
∈GETNEIGHBORS(s) do
14: ADDTOOPENLIST(s,OPEN, INCONS,CLOSE)
15: end for
16: next
pos ← MINCELL(OPEN, INCONS, S
goal
)
17: if next pos =
/
0 then
18: return False No path available
19: end if
20: if |next pos −s|≤
√
2 then
21: inc list ←GETINCONSISTANT(s,next pos)
22: for each s
0
∈ inc list do
23: ADDTOINCONSISTANTLIST(s, OPEN,INCONS,CLOSE)
24: end for
25: s ← next pos
26: else
27: if COMPUTEPATH(s,next pos, Path) then
28: s ← next pos
29: end if
30: end if
31: end while
32: return
33: end function
ting the minimum cell in the open list is implemented
in the TopKey(open list) function, using the sort
function of the STL (see Listing 1)). The two remain-
ing algorithms, occupy linear time although H
∗
is a
little more efficient than A
∗
. Again, this is due to the
number of nodes found in open list; it is larger in A
∗
.
b o o l
comp are ( p a i r <p a i r <i n t , i n t > ,
p a i r <do uble , doub le>> x ,
p a i r <p a i r <i n t , i n t > ,
p a i r <do uble , doub le>> y ){
r e t u r n (
x . s ec o nd . f i r s t <= x . s e c o n d . f i r s t &&
y . s ec o nd . se c on d <= y . s ec o nd . se c on d
) ;
}
p a i r <do uble , dou ble>
D L i g h t S t a r : : TopKey ( o p l s t &l s o p e n ) {
l s o p e n . s o r t ( co mpa re ) ;
r e t u r n l s o p e n . f r o n t ( ) . se c o n d ;
}
Listing 1: Cell with the lowest key.
Image 5 shows the use of H
∗
with the robot Turtle-
Bot3 in the Gazebo simulator and RViz. Image (A)
shows the environment of the robot in the Gazebo
simulator. The robot’s start position and the goal po-
sition are shown with red circles. The robot maps
its environment using a LIDAR. The figures from (1)
to (8) are generated by RViz; they show the different
stages through which the robot goes to reach its objec-
tive. The areas in dark grey show unrecognised areas
and, in light grey the free spaces. Obstacles are repre-
sented by black areas. The robot’s position is always
indicated with the red circle. Figure (B) shows the
Robot’s trajectory from its starting position to its goal
Head Star (H*): A Motion Planning Algorithm for Navigation Among Movable Obstacles
217

Figure 5: Simulation of H
∗
with the TurtleBot 3 robot in Gazebo.
Figure 6: Comparison of H
∗
with A
∗
and D
∗
Lite algo-
rithms.
position.
6 CONCLUSIONS
In this article, we have presented H
∗
, a motion plan-
ning algorithm for NAMO. The principle is to com-
bine the techniques of bug algorithms and path search
algorithms which use heuristics. The first results ob-
tained in simulation are very interesting, they show
that H
∗
is able to find a path without providing it with
a map beforehand. In our experiments, we noticed
that H
∗
provides a path equivalent to D
∗
Lite in most
typical environment configurations. Among the pos-
sible improvements that we are experimenting with
is that of finding the best way to determine inconsis-
tent cells in order to improve the performance of H
∗
in terms of distance traveled. We have also started to
experiment with our algorithm on a mobile robot in a
real environment.
REFERENCES
Charalampous, K., Kostavelis, I., and Gasteratos, A. (2017).
Recent trends in social aware robot navigation: A sur-
vey. Robotics and Autonomous Systems, 93:85–104.
Chen, G., Luo, N., Liu, D., Zhao, Z., and Liang, C.
(2021). Path planning for manipulators based on an
improved probabilistic roadmap method. Robotics
and Computer-Integrated Manufacturing, 72:102196.
Eiben, E. and Kanj, I. (2017). How to navigate through
obstacles? arXiv preprint arXiv:1712.04043.
Horiuchi, Y. and Noborio, H. (2001). Evaluation of path
length made in sensor-based path-planning with the
alternative following. In Proceedings 2001 ICRA.
IEEE International Conference on Robotics and Au-
tomation (Cat. No. 01CH37164), volume 2, pages
1728–1735. IEEE.
Kalpitha, N., Murali, S., et al. (2020). Optimal path plan-
ning using rrt for dynamic obstacles. Journal of Scien-
tific and Industrial Research (JSIR), 79(06):513–516.
Kamon, I. and Rivlin, E. (1997). Sensory-based motion
planning with global proofs. IEEE transactions on
Robotics and Automation, 13(6):814–822.
Koenig, S. and Likhachev, M. (2002). Dˆ* lite. Aaai/iaai,
15.
Kolhatkar, C. and Wagle, K. (2021). Review of slam al-
gorithms for indoor mobile robot with lidar and rgb-
d camera technology. Innovations in Electrical and
Electronic Engineering, pages 397–409.
LaValle, S. M. (2006). Planning algorithms. Cambridge
university press.
LaValle, S. M. et al. (1998). Rapidly-exploring random
trees: A new tool for path planning.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
218

Lentzas, A. and Vrakas, D. (2020). Ladybug. an inten-
sity based localization bug algorithm. In 2020 25th
IEEE International Conference on Emerging Tech-
nologies and Factory Automation (ETFA), volume 1,
pages 682–689. IEEE.
Lumelsky, V. and Stepanov, A. (1986). Dynamic path plan-
ning for a mobile automaton with limited information
on the environment. IEEE transactions on Automatic
control, 31(11):1058–1063.
McGuire, K. N., de Croon, G. C., and Tuyls, K. (2019). A
comparative study of bug algorithms for robot naviga-
tion. Robotics and Autonomous Systems, 121:103261.
Moghaddam, S. K. and Masehian, E. (2016). Planning robot
navigation among movable obstacles (namo) through
a recursive approach. Journal of Intelligent & Robotic
Systems, 83(3):603–634.
Renault, B., Saraydaryan, J., and Simonin, O. (2019). To-
wards s-namo: socially-aware navigation among mov-
able obstacles. In Robot World Cup, pages 241–254.
Springer.
Sankaranarayanan, A. and Vidyasagar, M. (1990). A new
path planning algorithm for moving a point object
amidst unknown obstacles in a plane. In Proceedings.,
IEEE International Conference on Robotics and Au-
tomation, pages 1930–1936. IEEE.
Sivaranjani, S., Nandesh, D. A., Gayathri, K., Ramanathan,
R., et al. (2021). An investigation of bug algorithms
for mobile robot navigation and obstacle avoidance
in two-dimensional unknown static environments. In
2021 International Conference on Communication
information and Computing Technology (ICCICT),
pages 1–6. IEEE.
Stilman, M. and Kuffner, J. J. (2005). Navigation among
movable obstacles: Real-time reasoning in complex
environments. International Journal of Humanoid
Robotics, 2(04):479–503.
Head Star (H*): A Motion Planning Algorithm for Navigation Among Movable Obstacles
219
