
Wall Climbing Emergent Behavior in a Swarm of Real-World Miniature
Autonomous Blimps
Tristan K. Schuler
1 a
, Cameron Kabacinski
2
, Daniel M. Lofaro
1
, Dhawal Bhanderi
2
,
Jennifer Nguyen
2
and Donald Sofge
1 b
1
Navy Center for Applied Research in AI (NCARAI), U.S. Naval Research Laboratory, Washington D.C, 20375, U.S.A.
2
Intern, U.S. Naval Research Laboratory, Washington D.C., 20375, U.S.A.
Keywords:
Miniature Autonomous Blimps, Swarm, Emergent Behavior.
Abstract:
Emergent behaviors in swarms can arise when agents with simple behavioral rules produce complex group
dynamics. In this work we develop both a physics-based simulation environment as well as a real-world
testbed for indoor miniature autonomous blimps to analyze sensor-driven emergent behavior. During the flight
experiments, the blimps had global localization from an indoor motion capture system to follow waypoints
but used downward facing ultrasonic ping sensors for local-frame altitude control. After introducing a wall
to the environment and commanding the swarm to the other side of the unknown obstacle, a wall climbing
emergent behavior arose where the swarm agents climbed over each other as well as the wall to reach the goal.
We demonstrate how modifying the sensor characteristics between trials and changing the swarm size affects
this emergent behavior in both simulation and with real-world blimps, and compare the results.
1 INTRODUCTION
Emergent behavior can arise in swarms when an agent
with simple behavioral rules can produce complex
group dynamics. There are many instances of emer-
gent behavior arising in nature, especially with social
insects. One of the most popular emergent behav-
ior models is for the flocking of birds or fish where
the initial conditions can lead to a common velocity
for the flock (Cucker and Smale, 2007). Foraging
ants leave behind pheromones during foraging which
other ants follow and continue to reinforce, creat-
ing a “highway” of ant traffic to the goal, typically
food (Bonabeau et al., 1997). Under certain con-
ditions, army ants will form “living bridges’ where
they will climb on top of one another to reach a goal
faster (Graham et al., 2017). Similarly, fire ants self-
assemble to build towers as temporary shelters, espe-
cially after flooding, a process that randomly emerges
(Phonekeo et al., 2017). Honeybees self-organize for
honeycomb creation and an overall pattern emerges
spontaneously from dynamic interactions among the
processes of depositing and removing brood, pollen
and honey (Camazine, 1991).
a
https://orcid.org/0000-0002-1567-322X
b
https://orcid.org/0000-0003-0153-3581
A common limitation to simulating swarm behav-
ior and algorithms is that there are frequently many
assumptions made such as only focusing on dynamic
behavior, having perfect communication, no catas-
trophic collisions, or even having agents with negligi-
ble size (Taylor and Nowzari, 2021). Several swarm
robot platforms and algorithm development efforts
have been inspired by nature. Researchers at Har-
vard developed the Bluebot underwater fish platform
and demonstrated common emergent behavior algo-
rithms on real agents, such as the ring state, and could
also sustain collisions with the tank and other agents
(Berlinger et al., 2021). Researchers at the Univer-
sity of Alabama explored waypoint navigation with
collidable micro-airships (Troub et al., 2017). The
GRASP lab at University of Pennsylvania developed
small UAVs that are capable of sustaining collisions
and then able to navigate without complete knowl-
edge of the environment, and then create a sparse
map of their surroundings (Mulgaonkar et al., 2017;
Mulgaonkar et al., 2020). Another group used sim-
ple robots with binary tactile sensors to determine if
a collision occurred and let the agents use this in-
formation for probabilistic localization (Mayya et al.,
2017; Mayya et al., 2018). Similarly, researchers
at ETH Zurich demonstrated navigation through an
unknown environment and low-level mapping by ex-
Schuler, T., Kabacinski, C., Lofaro, D., Bhanderi, D., Nguyen, J. and Sofge, D.
Wall Climbing Emergent Behavior in a Swarm of Real-World Miniature Autonomous Blimps.
DOI: 10.5220/0011636200003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 225-232
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
225

ploiting collision information from an onboard IMU
(Lew et al., 2019). In this work, we try to bridge the
gap between simulated and real-world swarms using
an indoor autonomous blimp robotic platform.
Indoor lighter-than-air vehicles are a great robotic
platform for testing emergent behaviors on real-world
robots. One of the major benefits to lighter-than-
air vehicles is that they can move in a 3D envi-
ronment with other agents without needing to ac-
count for the possibility of catastrophic collisions. In
this paper we use the Georgia Tech Miniature Au-
tonomous Blimps (GT-MAB) platform for produc-
ing wall-climbing emergent behavior on real-world
agents in a 3D space (Cho et al., 2017). In 2019,
researchers at the U.S. Naval Research Laboratory
demonstrated formation flying with 25+ modified ver-
sions of the GT-MAB, the largest real-world demon-
stration of indoor autonomous blimps to date (Schuler
et al., 2019). Additional recent research with this plat-
form includes time synchronized path planning, in-
door localization, human interaction, and gesture con-
trol (Gibson et al., 2020; Yao et al., 2019; Yao et al.,
2017; Seguin et al., 2020; Srivastava et al., 2019). Re-
searchers at the U.S. Naval Research Laboratory also
explored swarm behavior in lighter-than-air vehicles
using universal global inputs from onboard sensing as
well as exploring visoelastic fluid-inspired swarm be-
havior (Hall et al., 2021; McGuire et al., 2021).
In this paper, we set up an emergent behavior test
bed for miniature autonomous blimps in both simu-
lation and the real-world where the blimps climb an
unknown wall due to the inclusion of a downward
ultrasonic ping sensor for altitude control. We also
explore how adjusting the sensor characteristics or
parameters affects the emergent behavior. Addition-
ally, this paper discusses the development of a physics
based physics-based simulator capable of testing large
swarm sizes of indoor blimps. The simulator is vali-
dated by comparing the performance to real world ex-
periments with a smaller swarm of real-world agents.
2 WALL CLIMBING TESTBED
In our 2019 experiment using 25+ GT-MABs for for-
mation control, the agents used Vicon, an indoor in-
frared motion capture system, for horizontal waypoint
navigation. We installed downward-facing ultrasonic
ping sensors on the blimp gondola to do local-frame
altitude control. In the flight demonstration we also
manually drove a Pioneer ground rover, shown In Fig-
ure 1, underneath the autonomous blimp formation
and demonstrated that individual agents rose after de-
tecting a local-frame altitude change from the Pioneer
Figure 1: 25+ blimp swarm experiment where wall climb-
ing phenomenon was discovered.
underneath. Occasionally, a blimp would drift away
from its target waypoint due to either HVAC currents,
hardware malfunctions, or occluded motion capture
markers. Some of these drifting agents would reach
a wall and start “climbing” it. The climbing phe-
nomenon arose from the downward facing ultrasonic
ping sensor detecting the wall and triggering an up-
ward velocity to reach the target altitude, which was
never obtained since the wall was in range. This in-
troduced the question of whether or not a group of
blimps with simple sensing could overcome obstacles
without path-planning. We hypothesized that a swarm
of blimps could climb a wall without knowledge of
the obstacle, and that the success rate of reaching the
other side of the wall could change by adjusting sen-
sor characteristics and the swarm size.
2.1 Agent Design
The lighter-than-air agents used in these experiments
are a modified version of the GT-MAB agents. The
GT-MABs are helium filled lighter-than-air vehicles
with a customized gondola attached to standard 36”
Mylar balloon envelopes. The gondola contains five
motor/propeller pairs for holonomic motion: two for
altitude control, two for forwards/backwards and yaw
control, and one for lateral control. Additionally,
the gondola also contains the motor controller, bat-
tery, and XBee radio for communicating with a host
computer. For indoor localization, the agents were
equipped with retro-reflective Vicon markers on the
tops of the envelopes. We lightly spray painted the
tops of the envelopes to reduce noisy reflections from
the metallic Mylar envelope.
The modified GT-MABs incorporate a downward
facing ultrasonic ping sensor for altitude control or
obstacle avoidance and can be seen in Figure 2. The
ultrasonic ping sensor implementation was designed
to be modular, so that different ping sensors, with
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
226
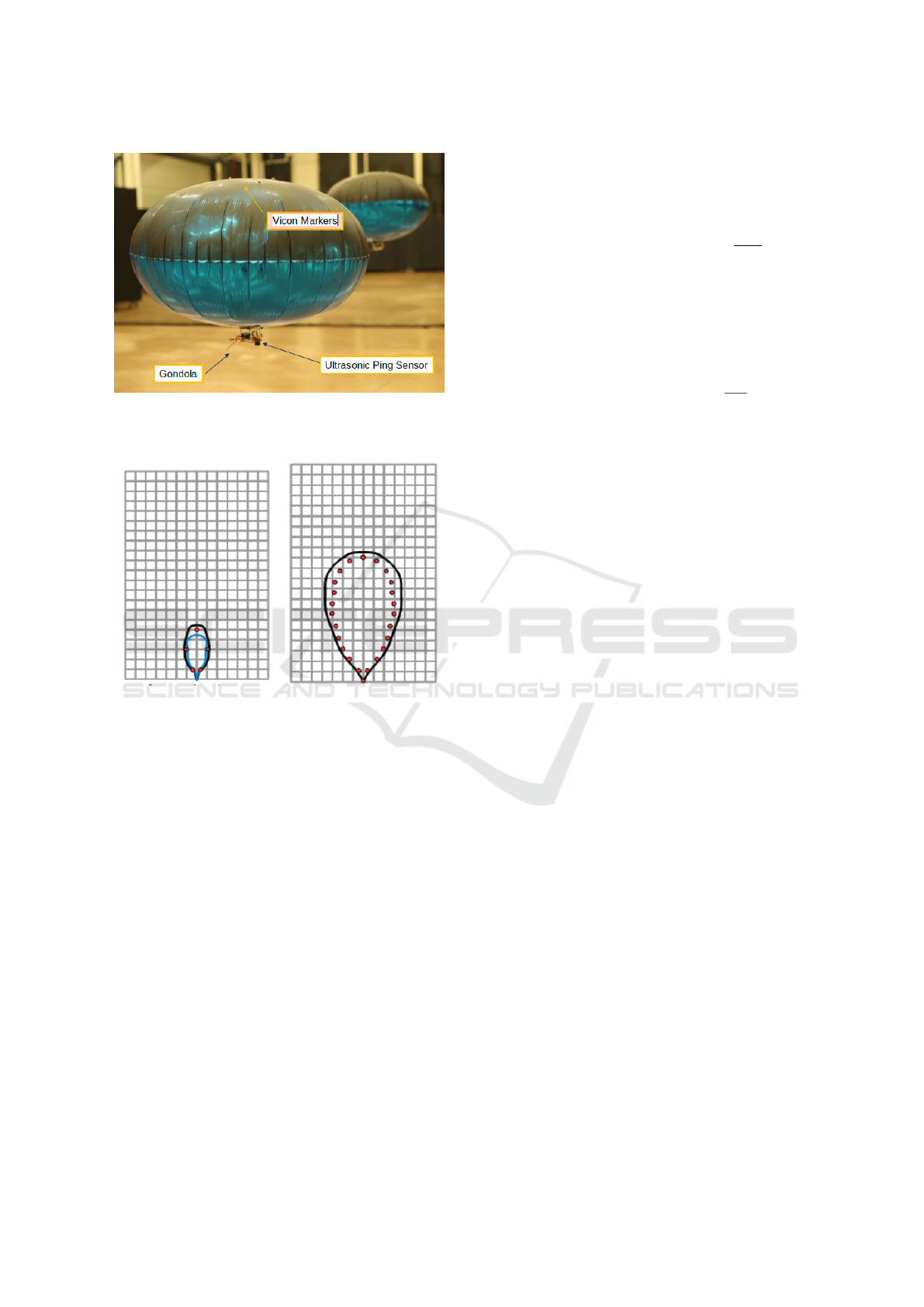
Figure 2: Modified Georgia Tech Miniature Autonomous
Blimps (GT-MAB) with downward facing ultrasonic sen-
sors for altitude control, and Vicon markers for localization.
Figure 3: MaxSonar Ultrasonic Ping Sensor beam width es-
timates for 30cm grid resolution and tested with a 3.5 inch
diameter dowel. Image 1 is narrowest beam width, and im-
age 2 is widest beam width available.
varying beam widths could easily be installed on
each. For these experiments we used two variations
of MaxSonar Ultrasonic ping sensors, the narrowest
and widest variations. Figure 3 shows the difference
between the narrow-beam and wide-beam sensors.
Both sensors have a maximum altitude range of 5.0 m
but significantly different proximity cones for detect-
ing ultrasonic pings. For these experiments we use
the same controller architecture as our 25+ lighter-
than-air autonomous agents demonstration; horizon-
tal motion was controlled from motion-capture feed-
back and altitude was controlled from ultrasonic ping
feedback (Schuler et al., 2019).
2.2 Control Structure
Both the real-world and simulated blimps used a
control architecture of 4 independent proportional-
derivative (PD) feedback controllers for horizontal
position, yaw orientation, and altitude. The controller
PD outputs denoted as u
x
global
, u
y
global
, u
z
local
are calcu-
lated separately by:
u
j
= K
p j
e
p j
+ K
i j
Z
t
0
e
p j
dt
′
+ K
d j
de
p j
dt
(1)
where j = {x
global
, y
global
, z
local
}, e
p j
is the Eu-
clidean error, and K
p
, K
i
, and K
d
are the proportional,
integral and derivative gains.
A fourth PD controller for yaw about the global z
-axis is defined by:
u
θ
= K
θ
p
e
θ
+ K
θ
i
Z
t
0
e
θ
dt + K
θ
d
de
θ
dt
(2)
where u
θ
is the resulting control rotational velocity
about the z-axis and e
θ
is the error between the desired
orientation about z and the measured orientation. K
θ
p
,
K
θ
i
, and K
θ
d
are the proportional, integral and deriva-
tive gains for the yaw controller.
The output of these 4 independent PD controllers
were velocities ˙x, ˙y, ˙z, and
˙
θ
z
:
[ ˙x, ˙y, ˙z,
˙
θ
z
] (3)
2.3 Simulation Environment
We developed a physics-based simulation environ-
ment to run experiments that would be challenging
to implement with real-world agents such as larger
swarm sizes and additional sensor characteristic dif-
ferences.
2.3.1 Simulation Architecture
The simulation architecture was developed in Cop-
peliaSim, previously known as VREP (Rohmer et al.,
2013). CoppeliaSim enables building dynamic robot
models out of simple and complex shapes that re-
spond to the environment, and allows individual agent
control through their own script. The simulator is
controlled through API calls to start/stop the simula-
tion and manipulate objects, which allows for simula-
tion automation and data collection.
2.3.2 Matching Simulated Blimps to GT-MAB
The simulated agents were matched to the physical
attributes of the real-world modified GT-MAB. Each
component, including the motors, envelope, gondola,
battery, and ballast, was measured and weighed, and
then recreated in simulation using simple shapes to
create a 1:1 scale model of the agent.
To make the simulation as realistic as possible,
real-world blimp characteristics were measured and
Wall Climbing Emergent Behavior in a Swarm of Real-World Miniature Autonomous Blimps
227

applied to the simulated agents. The most rele-
vant characteristics included measuring the maximum
force of a single motor, the blimp’s buoyancy, the
maximum velocity of the blimp, and approximate
angular dampening. Coppeliasim does not directly
support lift or aerodynamic simulation, so additional
forces are necessary to be applied to the model at each
simulation time step. Each agent’s control script di-
rectly interfaces with the simulated motors by apply-
ing a force at the motor locations and limited by the
measured maximum motor force.
To offset gravity and provide buoyancy, a con-
stant upward force is applied to the model’s center of
mass to estimate the lift force provided by the helium-
filled envelope. The exact force is based on the simu-
lated weight and a small ballast adjustment to provide
proper buoyancy (slightly below neutral). The buoy-
ancy characteristic was determined by dropping the
real blimp from a set height and recording the time
it took to fall, and then calibrating the ballast adjust-
ment in simulation.
To ensure a correct maximum achievable velocity,
a drag force was calculated and applied to the center
of mass at every simulation step. The drag force is
presented in Eq. 4 where F
d
is the drag force, ρ is the
air density, v is the velocity, c
d
is the drag coefficient,
and A is the cross-section area. While each variable in
the drag force equation could be found independently,
by grouping ρ, A, c
d
, and the 1/2 factor together as β,
the drag force equation becomes simplified, as shown
in Eq. 5.
The blimp’s real world characteristics can be
leveraged to find β as there are only two unknowns, F
d
and v, both of which can be found when the blimp is
moving with full forward throttle. The blimp’s max-
imum velocity happens when the blimp is no longer
able to accelerate and reaches a force balance, which
occurs when the two forward facing motors provide
a force equal to the drag force, as shown in Eq. 6,
where F
m
is the maximum force of a single motor.
The maximum velocity is measured by tracking the
blimp position over time. Thus, β will equal the max-
imum force provided by the forward motors divided
by the maximum velocity squared, shown in Eq. 7.
F
d
=
1
2
ρv
2
c
d
A (4)
β =
1
2
ρc
d
A, F
d
= βv
2
(5)
F
net
= ma, 2F
m
− F
d
= 0, F
d
= 2F
m
(6)
2F
m
v
2
MAX
= β (7)
Figure 4: Real-world wall climbing testbed with 8 au-
tonomous blimps equipped with downward facing ultra-
sonic sensors for altitude control.
Once β was found, at each simulation step, the
blimp velocity could be calculated by the simulator
and multiplied by β to find the drag force, as in Eq. 5,
and applied to the center of the blimp.
Additionally angular dampening was added to the
simulated agents to match real-world agents. With-
out any angular dampening, applied motor forces in
simulation caused a torque around the center of mass
which creates a rocking pendulum motion that is not
observed in the real world. The real blimp was held at
a 45-degree angle relative to the horizon and released
and timed until it settled back to horizontal equilib-
rium. Then, the simulated blimp was setup the same
and angular dampening coefficients were tuned until
the settle time was the same between the real and sim-
ulated models.
Finally, a proximity sensor was added with match-
ing characteristics to the ultrasonic ping sensor in-
stalled on the real-world gondolas shown in Figure
3. A Gaussian noise distribution was added to the
sensor feedback to simulate noise from the real sen-
sor as well as inconsistencies with altitude holding
due to additional unknown forces such as unknown
air flows or propeller wash. The same PD controller
structure from Section 2.2 was implemented on the
simulated agents for waypoint navigation with local
altitude sensing from the proximity sensor.
2.4 Experimental Setup
The simulation environment was setup with the same
parameters as the real-world experiment. A 2.5 m
wall was placed perpendicular to the desired path of
motion between the start and end way points. All
agents in the swarm were given the same starting and
ending waypoint in each trial. The agents had global
localization knowledge in the X-Y plane but used
a downward facing ultrasonic ping sensor for local-
frame altitude control. The agents then had 5 minutes
to attempt to maneuver to the other side of the un-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
228

(1). (2). (3).
(4). (5). (6).
Figure 5: Fifty simulated autonomous blimps with a local altitude setpoint of 1.0 m and 20 s to reach starting waypoint after
initial random distribution (1-2). After 20 s the group waypoint is set to the opposite of the side of the wall; the swarm
attempts to move to the waypoint (3-5). The blimps start ”towering” with extended time at a target waypoint (6).
known wall. Figure 4 shows the real-world set up of
the experiment.
Figure 5 shows snapshots of a simulated wall
climbing trial with 50 agents at a 1.0 m local-frame
altitude setpoint. At the start of a trial, the agents were
randomly distributed on one side of the wall and had
a 20 s period to maneuver to the starting X-Y way-
point coordinate centered on the same side of the wall
as the swarm, shown in the first two images of Fig-
ure 5. After 20 s, the waypoint changed to an X-Y
coordinate centered on the other side of the wall, and
the agents immediately try to maneuver to the new
waypoint. The agents were unaware of the wall and
their global altitude, only their global X-Y position
and local altitude readings from the downward facing
proximity sensors. An emergent behavior arose where
the blimps “climbed” the wall as well as other nearby
agents while trying to maneuver to the new waypoint,
shown in images 3-6 in Figure 5. By changing sensor
characteristics such as the altitude set point and beam
width, as well as the swarm size, the success rate of
the wall climbing emergent behavior changed.
Additionally, a secondary emergent behavior of
”towering” occasionally occurred at the starting or
ending waypoints when the swarm has extended time
at the waypoint. Figure 6 shows the towering behav-
ior in simulated and real world agents. Towering oc-
curs when an agent floats above another and triggers
a new local-frame altitude reading from the ultrasonic
sensor. The balloons do not start in a towering forma-
tion, but can maneuver on top of other agents for sev-
eral reasons including collisions from other agents,
prop wash from other agents, and sensor noise caus-
ing oscillating altitude control. Towering can happen
Figure 6: Towering emergent behavior with an 8 agent
swarm in both real-world and simulated blimps.
with as little as two agents, but is more prominent
with larger swarms.
Multiple trials were simulated and conducted with
physical agents with varying sensor characteristics in-
cluding beam width and altitude set point, as well as
varying the size of the swarm to observe effects on
the wall-climbing emergent behavior. Wall climbing
success was binary for individual agents; an individ-
ual success was denoted by crossing the plane of the
wall. The overall success rate of the swarm was then
the average percentage of agents that made it to the
other side of the wall. Five (5) trials were conducted
for each set of independent variables with the swarm
Wall Climbing Emergent Behavior in a Swarm of Real-World Miniature Autonomous Blimps
229
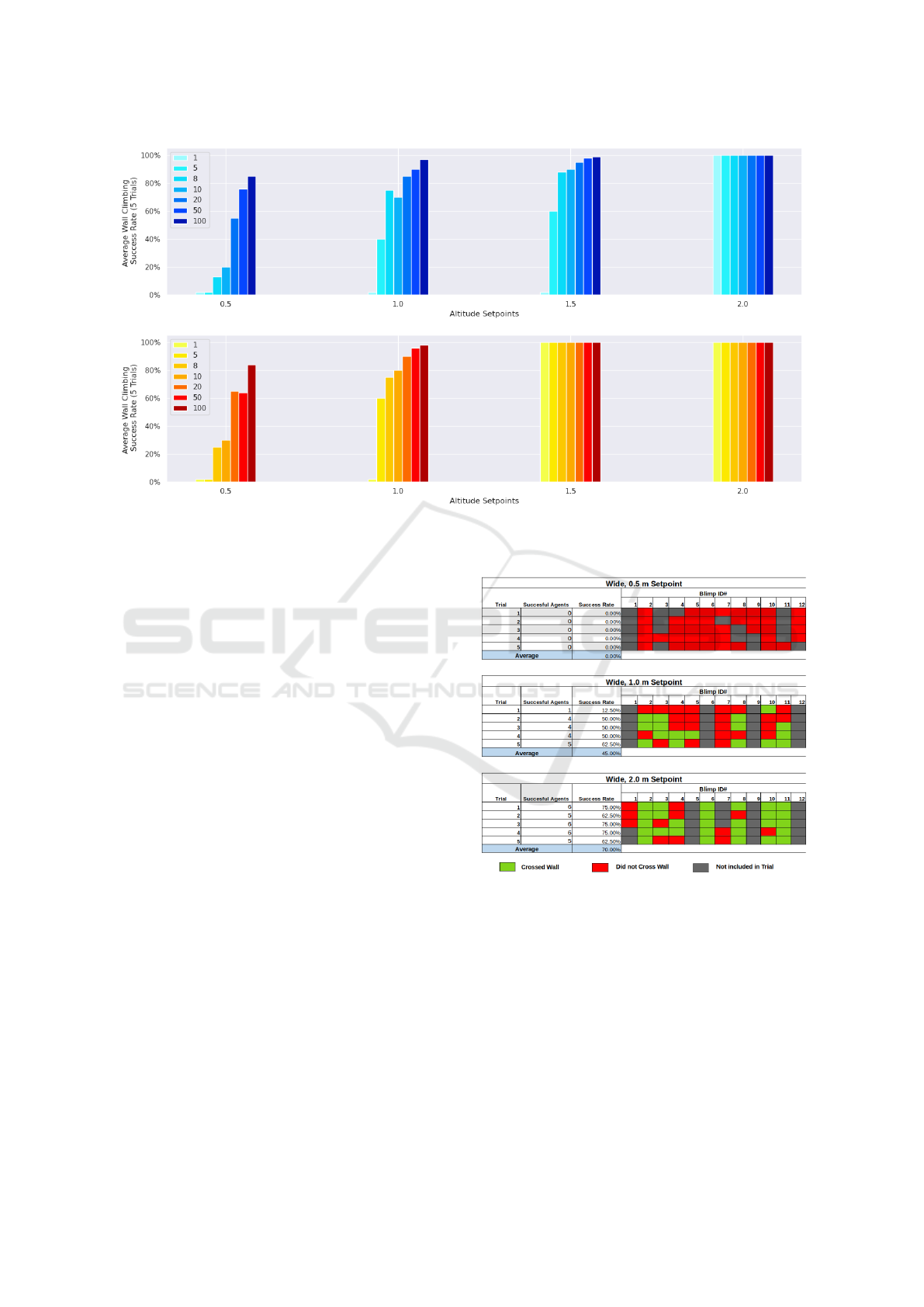
Figure 7: Simulated wall climbing success rates for downward facing narrow-beam-width proximity sensor (top) and wide-
beam-width (bottom) sensor for varying altitude setpoints and swarm sizes (color gradients).
wall climbing success rates averaged. The indepen-
dent variables in each trial included local-frame al-
titude setpoint from proximity sensor (0.5m, 1.0m,
1.5m, and 2.0m), proximity sensor beamwidth (nar-
row, wide), and swarm size (1, 5, 8, 10, 20, 50, and
100 agents).
3 RESULTS & DISCUSSION
Figure 7 shows the simulated swarm’s average wall
climbing success rates (along y-axis) after 5 trials for
3 varying parameters: proximity sensor beam width
(narrow on top, wide on bottom), swarm size (col-
ored gradient), and the altitude set point (along x-
axis). As hypothesized, both a larger swarm size and
higher altitude set points increased the overall swarm
wall-climbing success rate. The 2.0 m altitude set-
point resulted in a 100% wall climbing success rate
for any number of simulated agents for both the wide
and narrow proximity sensor. Surprisingly, the wide-
angle proximity sensor had minimal effect on the wall
climbing success rate, both on simulated agents and
the real-world agents. On average, the wide-angle
ultrasonic sensor produced a 5-10% increase in wall
climbing success rate compared with the narrow beam
width sensor. This gap in performance between the
narrow and wide beam width sensors also decreased
the larger the swarm size was. Therefore, like the real-
world experiments, the altitude set point was the driv-
Figure 8: Wall climbing success rate for real-world blimps
equipped with wide angle ultrasonic ping sensors at various
altitude setpoints.
ing force for wall climbing emergent behavior, not the
beamwidth of the sensor.
Similar trials were conducted with a swarm of
8 real-world blimps. Figure 8 shows the individual
trials of the 8-agent swarm. For the most part, the
agents that successfully crossed the wall were ran-
dom between trials; however, there were exceptions.
Throughout the trials, blimp #7 never crossed the wall
although it was fully operational. Similarly, in the 2.0
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
230

Figure 9: Experimental and simulated wall climbing suc-
cess rate for 8 real-world blimps at various altitude setpoints
and ping sensor beam widths.
m experiments blimps #2, #6, and #11 made it across
the wall every time.
Figure 9 shows the wall climbing success rate dif-
ference between simulation and the real-world exper-
iment for an 8-agent swarm. The overall trend was
similar, with a higher altitude setpoint resulting in a
higher wall climbing success rate for both simulated
and real-world agents. However, the simulated en-
vironment had higher success rates for each altitude
setpoint. The 2.0 m setpoint had a 100% success rate
for simulated agents whereas only 65% of the swarm
made it across on average with the real-world blimps.
It is important to note that the simulated agents
perform better than the real-world agents, for many
reasons. While efforts were made to match the sim-
ulation to the dynamics of the real-world blimps, as
discussed in section 2.3.2 there’s still many unknown
or hard to simulate variables. A major inconsis-
tency that’s challenging to simulate is random hard-
ware malfunctions or failures, which happened fre-
quently. The most common hardware issues were
typically motors with weakened thrust profiles after
frequent use or communication issues with either the
mission control computer, or the motion capture sys-
tem. These hardware issues were a major reason why
we felt the need to develop a MAB simulator to test
larger swarms of MABs without constantly making
robot repairs or solving the hard problem of indoor
global localization with a large number of agents.
The gray numbered blimps in Figure 8 shows
blimps that were not included in the trials. These
were typically hardware issues that could be repaired
or fixed in between trials, but sometimes the issue was
a permanent failure that required hardware replace-
ment. The required ballast and buoyancy force varies
from blimp to blimp due to helium leakage and re-
quires occasional refilling before experiments. Ad-
ditionally, small changes in temperature as well as in-
ternal drafts from the HVAC system or other miscella-
neous indoor currents can also have major effects on
blimp performance; while these two variables could
be simulated, they are hard to accurately match to the
real-world testbed.
4 CONCLUSIONS AND FUTURE
WORK
In this work we develop a simulation and experimen-
tal environment for exploring emergent behaviors in
swarms of indoor miniature autonomous blimps. We
demonstrate a wall climbing emergent behavior in
a swarm of autonomous blimps experimentally and
in simulation through changing the characteristics of
a very simple ultrasonic ping sensor and the swarm
size. As the local-frame altitude set point increases,
the success rate of wall climbing increases; also, as
the swarm size increases, the wall climbing success
rate increases. With extended time at a group way-
point, a secondary emergent behavior of ”towering”
would also occasionally occur.
In the future we would like to change the con-
trol scheme to explicitly include potential fields to
see if the emergent behavior changes, as well as add
more known and unknown obstacles. In these experi-
ments the individual agents’ behavior mimics 2D po-
tential fields in an unknown environment. There is
an attractive force in the XY plane attracting all of
the agents to the other side of the room and a re-
pulsive force along the Z-axis from the floor, wall,
and other agents all acting as repulsive forces. Typ-
ically, the wall acts as a local maximum for individ-
ual agents with a low altitude setpoint (<1.5). How-
ever, with a large enough swarm, the attractive force
can overcome the cumulative repulsive forces from
other agents when they all reach the wall. We would
also like to test the emergent behaviors with differ-
ent styles of indoor autonomous blimp platforms that
are currently used in the research community such as
flapping wing blimps, cigar-shaped and fish-inspired
blimps, and spherical blimps (Lin et al., 2022). Dif-
ferent shapes and sizes of blimps will introduce vary-
ing motion profiles, agility, controllability, and addi-
tional sensing capability on larger blimps.
ACKNOWLEDGMENTS
This work was performed at the U.S. Naval Research
Laboratory for the project “Adaptive Real-Time Al-
gorithms for Multiagent Cooperation in Adversarial
Environments”. The views, positions and conclusions
Wall Climbing Emergent Behavior in a Swarm of Real-World Miniature Autonomous Blimps
231

expressed herein reflect only the authors’ opinions
and expressly do not reflect those of the U.S. Naval
Research Laboratory, nor those of the Office of Naval
Research. The authors would like to thank the Geor-
gia Tech Systems Research Lab for providing hard-
ware for the modified GT-MABs. We would like to
thank several additional U.S. Naval Research Lab in-
terns for assisting with the real-world wall climbing
experiments, including Alex Maxseiner, Brian Mate-
vich, Divya Srivastav, Tony Lin, and Richard Hall.
REFERENCES
Berlinger, F., Gauci, M., and Nagpal, R. (2021). Implicit
coordination for 3d underwater collective behaviors in
a fish-inspired robot swarm. Science Robotics, 6(50).
Bonabeau, E., Theraulaz, G., Deneubourg, J.-L., Aron, S.,
and Camazine, S. (1997). Self-organization in social
insects. Trends in ecology & evolution, 12(5):188–
193.
Camazine, S. (1991). Self-organizing pattern formation on
the combs of honey bee colonies. Behavioral ecology
and sociobiology, 28(1):61–76.
Cho, S., Mishra, V., Tao, Q., Vamell, P., King-Smith, M.,
Muni, A., Smallwood, W., and Zhang, F. (2017). Au-
topilot design for a class of miniature autonomous
blimps. In 2017 IEEE conference on control technol-
ogy and applications (CCTA), pages 841–846. IEEE.
Cucker, F. and Smale, S. (2007). Emergent behavior
in flocks. IEEE Transactions on automatic control,
52(5):852–862.
Gibson, J., Schuler, T., McGuire, L., Lofaro, D. M., and
Sofge, D. (2020). Swarm and multi-agent time-based
a* path planning for lighter-than-air systems. Un-
manned Systems, 8(03):253–260.
Graham, J. M., Kao, A. B., Wilhelm, D. A., and Garnier,
S. (2017). Optimal construction of army ant living
bridges. Journal of theoretical biology, 435:184–198.
Hall, R., Maxseiner, A., Matejevich, B., Sofge, D. A., and
Lofaro, D. M. (2021). Emergent behavior in swarms
with on-board sensing. In 2021 IEEE Symposium Se-
ries on Computational Intelligence (SSCI). IEEE.
Lew, T., Emmei, T., Fan, D. D., Bartlett, T., Santamaria-
Navarro, A., Thakker, R., and Agha-mohammadi, A.-
a. (2019). Contact inertial odometry: collisions are
your friends. In The International Symposium of
Robotics Research, pages 938–958. Springer.
Lin, T. X., Rossouw, M., Maxseiner, A. B., Schuler, T., Gar-
ratt, M. A., Ravi, S., Zhang, F., Lofaro, D. M., and
Sofge, D. A. (2022). Miniature autonomous blimps
for indoor applications. In AIAA SCITECH 2022 Fo-
rum, page 1834.
Mayya, S., Pierpaoli, P., Nair, G., and Egerstedt, M. (2018).
Localization in densely packed swarms using inter-
robot collisions as a sensing modality. IEEE Trans-
actions on Robotics, 35(1):21–34.
Mayya, S., Pierpaoli, P., Nair, G. N., and Egerstedt, M.
(2017). Collisions as information sources in densely
packed multi-robot systems under mean-field approx-
imations. In Robotics: Science and Systems, vol-
ume 13.
McGuire, L., Schuler, T., Otte, M., and Sofge, D. (2021).
Viscoelastic fluid-inspired swarm behavior to reduce
susceptibility to local minima: The chain siphon al-
gorithm. IEEE Robotics and Automation Letters,
7(2):1000–1007.
Mulgaonkar, Y., Liu, W., Thakur, D., Daniilidis, K., Tay-
lor, C. J., and Kumar, V. (2020). The tiercel: A novel
autonomous micro aerial vehicle that can map the en-
vironment by flying into obstacles. In 2020 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 7448–7454. IEEE.
Mulgaonkar, Y., Makineni, A., Guerrero-Bonilla, L., and
Kumar, V. (2017). Robust aerial robot swarms without
collision avoidance. IEEE Robotics and Automation
Letters, 3(1):596–603.
Phonekeo, S., Mlot, N., Monaenkova, D., Hu, D. L., and
Tovey, C. (2017). Fire ants perpetually rebuild sinking
towers. Royal Society open science, 4(7):170475.
Rohmer, E., Singh, S. P., and Freese, M. (2013). V-rep:
A versatile and scalable robot simulation framework.
In 2013 IEEE/RSJ International Conference on Intel-
ligent Robots and Systems, pages 1321–1326. IEEE.
Schuler, T., Lofaro, D., McGuire, L., Schroer, A., Lin, T.,
and Sofge, D. (2019). A study of robotic swarms
and emergent behaviors using 25+ real-world lighter-
than-air autonomous agents (lta3). In 2019 3rd In-
ternational Symposium on Swarm Behavior and Bio-
Inspired Robotics (SWARM).
Seguin, L., Zheng, J., Li, A., Tao, Q., and Zhang, F. (2020).
A deep learning approach to localization for naviga-
tion on a miniature autonomous blimp. In 2020 IEEE
16th International Conference on Control & Automa-
tion (ICCA), pages 1130–1136. IEEE.
Srivastava, D., Lofaro, D., Schuler, T., and Sofge, D.
(2019). Gesture-based interface for multi-agent and
swarm formation control. In 2019 3rd International
Symposium on Swarm Behavior and Bio-Inspired
Robotics (SWARM).
Taylor, C. and Nowzari, C. (2021). The impact of catas-
trophic collisions and collision avoidance on a swarm-
ing behavior. Robotics and Autonomous Systems,
140:103754.
Troub, B., DePineuil, B., and Montalvo, C. (2017). Simula-
tion analysis of a collision-tolerant micro-airship fleet.
Int’l Journal of Micro Air Vehicles, 9(4):297–305.
Yao, N., Anaya, E., Tao, Q., Cho, S., Zheng, H., and Zhang,
F. (2017). Monocular vision-based human follow-
ing on miniature robotic blimp. In 2017 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 3244–3249. IEEE.
Yao, N.-s., Tao, Q.-y., Liu, W.-y., Liu, Z., Tian, Y., Wang,
P.-y., Li, T., and Zhang, F. (2019). Autonomous fly-
ing blimp interaction with human in an indoor space.
Frontiers of Information Technology & Electronic En-
gineering, 20(1):45–59.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
232
