
Teleo-Reactive Agents in a Simulation Platform
Vasileios Apostolidis-Afentoulis
a
and Ilias Sakellariou
b
Department of Applied Informatics, School of Information Sciences, University of Macedonia,
156 Egnatia Str., GR-54636 Thessaloniki, Greece
Keywords:
Agent Based Modeling and Simulation, Simulation Languages and Platforms, Teleo-Reactive Agents,
NetLogo.
Abstract:
Agent based modeling and simulation (ABMS) has been applied to a number of research areas including
economics, social sciences, urban planning, epidemiology etc. with significant success. Agent simulation
platforms have long been the principal tool, contributing to the wide adoption of ABMS, offering rapid model
development for researchers in various fields. However, in most of the cases, agent behaviour in simulations
is encoded employing standard or domain specific programming languages, with limited support for agent
programming at a higher level. The present work contributes towards this direction, presenting an imple-
mentation of the Teleo-Reactive approach proposed by Nilsson for robotic control, to a well known ABMS
platform, NetLogo. The aim is to allow modelers to encode complex agent models easily and thus to enhance
the impact of ABMS to the respective fields.
1 INTRODUCTION
Agent-based Modeling & Simulation (ABMS) is a
powerful technique with a wide range of applications
in recent years, that advocates the idea of system mod-
eling as a collection of autonomous decision-making
entities. Each entity (agent), makes decisions based
on its perception of the world, possibly an internal
state and an executable specification of its behavior.
Acting in a shared with other agents environment,
leads to agent interaction resulting to the emergence
of complex patterns, providing valuable insights into
the dynamics of the actual system under considera-
tion.
Although a large number of simulation platforms
have been proposed, for instance 85 are reported by
Abar et al. in (Abar et al., 2017), quite a few offering
modeling of more complex (intelligent) agents, bal-
ancing between ease of use and modeling power of
simulated entities is still an open research issue. For
instance, Belief-Desire-Intention (BDI) agents (Rao
et al., 1995), one of the most studied approaches in
programming multi-agent systems, has been shown
to provide significant benefits to social simulations
(Adam and Gaudou, 2016), however, has not received
a wider acceptance, possibly due to the fact that pro-
a
https://orcid.org/0000-0002-4147-7011
b
https://orcid.org/0000-0003-3522-6045
gramming agents in such high level declarative ab-
stractions is not a common skill among researchers
of fields outside computer science (and in many cases
not even withing the latter). This can be attributed to
an extent to the lack of logic programming skills, that
presents a major obstacle in the adoption of BDI and
particular AgentSpeak as its one of the most common
implementations.
An approach that provides such a balance in
programming goal directed agents operating in dy-
namic environments, goal monitoring and replanning
in a single elegant package, yet maintaining concep-
tual simplicity, is Teleo-Reactive (TR) programming
(Nilsson, 1993; Nilsson, 2001). TR programs address
issues such as gradually achieving the agent’s goal,
while gracefully responding to failures and environ-
ment changes, characteristics derived from their de-
sign target that was originally real world robotic sys-
tems. This makes TR an interesting agent behaviour
modeling choice for agents in simulation platforms,
that the current work introduces. Indeed, we support
that robotic agents and agents in a simulation envi-
ronment with a spatial dimension, share quite a few
characteristics.
Thus, the main contribution of the current work
is to present TR-TURTLES, an initial attempt of sup-
porting Teleo-Reactive programming in a general pur-
pose agent based simulation platform, i.e. NetLogo,
26
Apostolidis-Afentoulis, V. and Sakellariou, I.
Teleo-Reactive Agents in a Simulation Platform.
DOI: 10.5220/0011635300003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 26-36
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

through a meta-interpreter. We address issues such as
syntactic support, belief store updates, rule action se-
mantics, and provide a preliminary evaluation of the
implementation.
To this end, the rest of the paper is organised as
follows. Section 2 provides an overview of a subset
of available ABMS platforms, focusing on their sup-
port for complex agent modeling. The Teleo-Reactive
approach is briefly presented in Section 3. The intro-
duction of the TR approach in NetLogo is presented
in Section 4, and Section 5 presents an example of an
agent simulation developed in TR-TURTLES. The ex-
ecution overhead introduced by the meta-interpreter
along with some preliminary results is discussed in
Section 6. Finally, Section 7 concludes the paper and
discusses future directions.
2 COMPLEX AGENTS IN ABMS
PLATFORMS
A review of the all the available agent-based simula-
tion platforms exceeds the scope of this paper. There
are numerous review papers that address the subject
and provide classifications of active and not so active
platforms, as for instance (Abar et al., 2017; Kravari
and Bassiliades, 2015; Railsback et al., 2006). Thus,
the current section mainly reports on three, widely
used, open source, actively maintained platforms, that
are “general-purpose”, i.e. do not target a specific ap-
plication area. For instance, MATSim (Horni et al.,
2016), has been extended to provide support for BDI
(Padgham et al., 2014), however, given that it targets
transportation simulations, it is not included. Thus,
Repast, GAMA and NetLogo are briefly described fo-
cusing on their support in modeling complex agents.
The Repast Suite, (Repast Simphony (North et al.,
2013), Repast HPC (Collier and North, 2013) and re-
cently Repast for Python, are a set of agent-based
modeling and simulation platforms, sharing some
common concepts, but targeting different computa-
tional environments, i.e. workstations vs high perfor-
mance computing (HPC). Agent models can be devel-
oped in mainstream general programming languages
Java and Groovy, and ReLogo which can be consid-
ered as domain specific language following the syntax
and semantics of NetLogo. To ease the development
of complex agents, Repast Simphony supports en-
coding agent behaviour using statecharts (Ozik et al.,
2015), with an automatic compilation of the latter to
Java and integration to the simulation environment.
Adding programming constructs and agent con-
cepts such as ACL and interaction protocols to Repast
has also been considered in a number of projects like
MISIA (Garc
´
ıa et al., 2011), Jrep (Gormer et al.,
2011) and SAJaS (Cardoso, 2015). The approach
in SAJaS, targets mainly a software engineering ap-
proach to assist JADE based systems to be tested be-
fore deployment, or modelers interested in FIPA com-
pliant simulations latter turned to full MAS systems,
bridging “the gap between MAS simulation and de-
velopment”.
Although there is no official BDI agent support in
Repast, work in (Padgham et al., 2011) reports on a
BDI model in JACK implemented in a modified ver-
sion of Repast City ABM model, where authors ex-
plored synchronization issues between the BDI sys-
tem and Repast, to allow a reliable simulation and
modeling. The simulation framework consists of the
ABM model (sensor-actuator agents) and the BDI
model (reasoning agents) to provide high-level de-
cision making. It supports interaction between the
two models via actions, percepts, sensing actions and
time-stepping, using a message passing protocol.
GAMA (Taillandier et al., 2019) is a platform that
supports development of spatially explicit simulations
with a wide variety of agents. It offers a complete de-
velopment environment, 2D/3D visualizations, sup-
port for integrating Geographical Information System
(GIS) data, and multi-level modeling. Modelers de-
velop simulations in GAML, that supports agent con-
trol using finite state machines, task-based architec-
tures, i.e. choosing a task on a number of strate-
gies, reactive style rule-based architectures (i.e. re-
flex rules), and other control architectures that are
available as additional plugins. Gamma supports BDI
through BEN (Bourgais et al., 2020), explicitly han-
dling beliefs, desires and intentions, however intro-
ducing also more advanced aspects of agency such as
emotions and norms, integrating theories such as the
OCEAN model for representing personality features,
OCC model for emotions, explicitly representing so-
cial relations, thus leading to a rich representation of
agent characteristics and interactions.
NetLogo (Tisue and Wilensky, 2004) is a versa-
tile programming environment that enables the cre-
ation of complex system models, in an easy to use
manner. An extensive library of models from various
fields (economics, biology, physics, chemistry, psy-
chology, etc.), combined with user friendliness, con-
tributed to its wide adoption. Although NetLogo tar-
gets mainly simple agents, a number of approaches
have been proposed towards supporting more com-
plex behavioural models. Work reported in (Sakellar-
iou, 2012) provides a domain specific language and an
execution engine that allows the encoding of agents
controlled by state machines. Other state based mod-
els, such as Stream X-Machines (Harwood, 1998),
Teleo-Reactive Agents in a Simulation Platform
27

i.e. state-based machines extended with a memory
structure and functions that guard transitions between
states, have been introduced in NetLogo (Sakellar-
iou et al., 2015), along with an approach to agent
testing. A limited support for BDI agents and FIPA
ACL message passing has been reported in (Sakellar-
iou et al., 2008), that provides the necessary primi-
tives through a set of procedures and functions. In
all previous approaches, authors provided implemen-
tations in the NetLogo language. In contrast, (Luna-
Ramirez and Fasli, 2018) integrates Jason (Bordini
et al., 2007) (one of the most complete implementa-
tions of AgentSpeak in Java), with NetLogo to pro-
vide a disaster rescue scenario, by having the latter
acting as the environment in the Jason platform and
providing a link between the two.
Finally, it should be noted that the question of
bridging the gap between simulation platforms and
agent programming, by providing a framework to in-
tegrate “off-the-self” BDI systems and agent simula-
tion platforms, has been addressed in (Singh et al.,
2016). The latter describes a layered architecture to
that allows any BDI programming language to “act as
the brains” of simulated entities. In the same vein, an
approach to multi-level simulation, integrating a cog-
nitive BDI layer, a social layer based on diffusion the-
ory in social networks and an agent based simulation
platform, each corresponding to the cognitive, social
and physical layers necessary, is described in (Bulu-
mulla et al., 2022), that employees MATSim (Horni
et al., 2016) as the simulation platform, as an exam-
ple.
To our knowledge, an attempt to integrate the
Teleo-Reactive paradigm in a “general purpose” sim-
ulation platform has not been reported before.
3 THE TELEO-REACTIVE
APPROACH
The Teleo-Reactive approach was originally intro-
duced by Nilsson (Nilsson, 1993), aiming to merge
control theory and computer science notions, in order
to offer an elegant way to encode agent behaviour in
dynamic environments. Thus, a Teleo-Reactive se-
quence (TR) is an ordered list of production rules,
guarded by environment conditions (K
i
) that initiate
actions (a
i
).
K
1
→ a
1
K
2
→ a
2
. . . K
m
→ a
m
Rule ordering dictates a top-down firing prior-
ity, i.e. rules appearing early in the sequence have
a higher priority. Thus, the condition K
m
implicitly
contains the negation of all previous rule conditions
{K
j
| j < m}.
Goal directed behaviour (teleo) is achieved by
appropriately designing TR sequences to satisfy the
regression property (Nilsson, 1993; Nilsson, 2001):
each lower priority rule action is expected to achieve
the condition of a higher priority rule, gradually lead-
ing to the achievement of the top-level goal, appearing
as a condition of the first rule. Constantly monitoring
the environment and evaluating rule conditions guar-
antees reactivity and ensures that the highest priority
rule is always fired. Nilsson further defines complete-
ness, as the property of TR sequences, in which the
disjunction of all their rule conditions is a tautology.
Sequences that satisfy both regression and complete-
ness are universal, i.e. in the absence of sensing or
action errors will eventually achieve their goal.
In TR programs, primitive actions are either dis-
crete, i.e. are applied once the corresponding rule
fires, or durative, i.e. actions applied while the cor-
responding rule condition is true. This distinction,
that originates from the need to provide smooth ac-
tion execution in continuous real world robotic envi-
ronments, has some interesting implications in simu-
lation environments, discussed in Section 4.2. Apart
from primitive actions, the right hand side (RHS) of
a rule can invoke a TR program. However, the lat-
ter does not follow the classical procedure invoca-
tion in programming languages, i.e. there is no “re-
turn” primitive: conditions are continuously assessed
for the discovery of the next rule to be fired (Nils-
son, 1993). Finally, TR programs can contain vari-
ables, bound at the execution time to offer generality
in programming agent behaviour. The TR approach
presents quite a few similarities with other reactive
approaches, most notably that of Brooks (Brooks,
1986). An extensive comparison can be found in
(Nilsson, 1993).
Although with a very appealing simplicity, TR
has to overcome issues common in purely reactive
architectures that arise due to complexity. Nilsson
proposed the “Triple Tower” architecture (Nilsson,
2001), enhancing the simple TR approach, with a
deductive rules component (“Percepts Tower”) em-
ployed to populate the “Model Tower” with beliefs,
used by the TR programs in “Actions Tower”. To-
wards the same goal, Coffey and Clark (Coffey and
Clark, 2006) proposed a hybrid architecture that com-
bines BDI with TR, having the latter as plans in the
former, yielding significant advantages, such as effi-
cient intention suspension due to the stateless nature
of TR programs.
TeleoR (Clark and Robinson, 2015) is an exten-
sion of the Nilsson’s Teleo-Reactive paradigm, imple-
mented in an extended logic programming language
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
28

Qu-Prolog (Quantifer Prolog) (Staples et al., 1989).
TeleoR provides types and higher-order functions that
create a safeguard for the correct instantiating of agent
(robotic) actions to prevent run-time errors. Beliefs
are handled via the QuLog (Robinson et al., 2003)
(which runs on top of Qu-Prolog), offering a rich rule
based language, to encode belief maintenance. Rules
have been extended with while and until conditions,
that allow rule commitment while a condition is true
or until a condition becomes true (i.e. inferable from
the belief base) respectively, within a TR procedure.
The action part of TR rules has been extended to sup-
port parallel actions, time sequenced durative actions,
i.e. an action sequence with predetermined time du-
ration for actions, and wait-repeat annotations to al-
low repeating the application of an action in prede-
termined time intervals (or yield an error if the latter
fails). Finally, message exchange between agents is
supported via Pedro, a logic programming oriented
message passing infrastructure.
There are numerous extensions to the TR
paradigm, and also work that combines TR with other
approaches. For instance, embedding statecharts in
TR programs in order to overcome complexity issues
is discussed in (S
´
anchez et al., 2017).
Formalising TR semantics has been also inves-
tigated in numerous approaches: in (Kowalski and
Sadri, 2012) authors provide model theoretic seman-
tics by representing TR programs in Abductive Logic
Programming and (Dongol et al., 2010) employs tem-
poral logic over continuous intervals to formalize TR
semantics. A systematic literature review of 53 Teleo-
Reactive-based studies until 2014 can be found in
(Morales et al., 2014).
4 TELEO-REACTIVE AGENTS IN
NetLogo
The requirements that underline the TR-TURTLES
approach are as follows:
• offering modelers the ability to encode complex
agent behaviour by embedding Teleo-Reactive
rules in NetLogo syntax,
• low installation cost and an implementation ap-
proach that will survive the frequent evolutions
of the NetLogo platform, with minimal to none
changes,
• ease of use, small learning curve and compliance
with the interactive style of model development in
NetLogo and well as to its modeling approach.
Regarding the first requirement, the original
TeleoR syntax has been modified slightly, while keep-
ing the basic form of TR programs, as described the
following sections. It has to be noted however, that
the current implementation does not support a num-
ber of features that a full system like QuLog/TeleoR
supports; some important features, such as supporting
variables in rules, have still to be considered as their
introduction involves some considerations and design
choices.
The second requirement was addressed by devel-
oping the meta-interpreter in the modeling language
of NetLogo. The latter has a functional flavour,
supporting for instance anonymous functions, how-
ever provides a rather limited number of primitives
for some common operations, such as strings. Al-
though such an implementation choice appears to be
an unconventional approach to that of extending the
simulation platform’s functionality via the provided
JAVA/SCALA language API, we found it possible to
develop the meta-interpreter using the facilities pro-
vided by the language. This decision might demand a
higher programming effort, however, it presents two
important benefits. The first is that the implemen-
tation is more likely to survive changes in the Net-
Logo platform as the latter evolves, since it is ex-
pected that newer versions will preserve backward
compatibility in the NetLogo language or at least in-
troduce minimal changes. Thus, it minimizes the
number of dependencies. The second concerns the
fact that it allows to encode agent sensors and actu-
ators as NetLogo commands and reporters, the eval-
uation/execution of which is controlled by the meta-
interpreter. Thus, solves the problem of interfacing
TR-TURTLES to the underlying simulation platform.
Similar approaches have been used in the past for en-
coding complex agent behaviour as reported for in-
stance in (Sakellariou et al., 2008).
The third requirement is also addressed by hav-
ing the meta-interpreter as a NetLogo command that
each “intelligent” turtle invokes to determine its next
action, simulations involving TR programs control-
ling NetLogo agents can be developed incremen-
tally, following the interactive style programming
that the NetLogo platform offers. Additionally, TR-
TURTLES follows the basic simulation approach com-
monly found in all NetLogo models, that is to proceed
the simulation in cycles, each typically corresponding
to one time unit (tick in NetLogo terms), meaning that
the agent can perform (again typically) a limited num-
ber of actions in each simulation cycle.
The overall architecture of TR-TURTLES is pre-
sented in Fig. 1. Briefly, the modeler has to provide
the simulation environment, the agent sensors and ef-
fectors as NetLogo reporters and procedures. In or-
der to specify the behaviour of a set of agents (breed
Teleo-Reactive Agents in a Simulation Platform
29
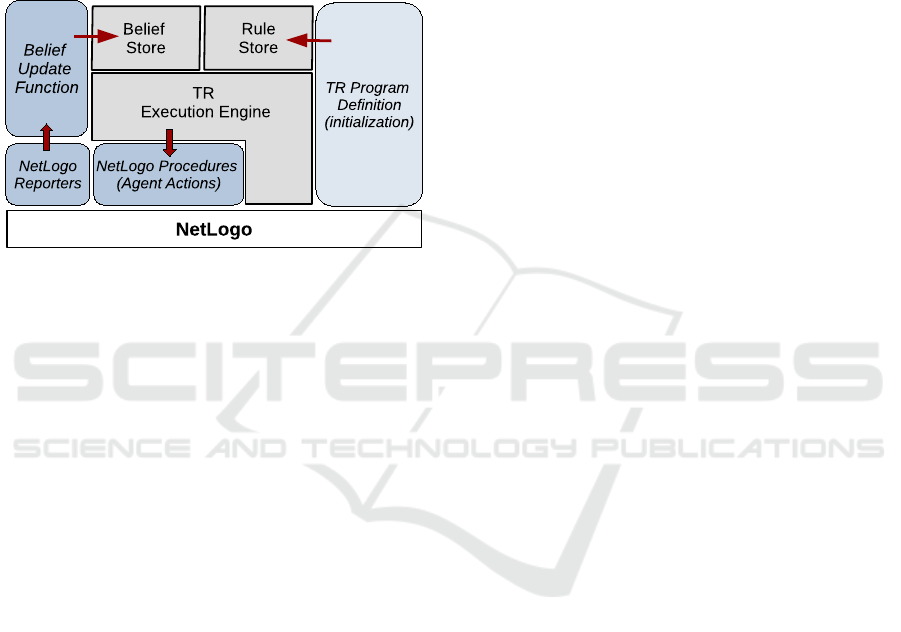
in NetLogo terms) using TR-TURTLES, the modeler
(a) defines the former in a NetLogo procedure using
the syntax described in Fig. 2 (populating the Rule
Store with the TR rules), and (b) provides the belief
update “callback” function translating sensory input
to beliefs to update the Belief Store. The execution of
the agent is then controlled by TR-TURTLES: in each
simulation cycle the meta-interpreter (TR Execution
Engine) invokes the “callback” function and executes
the respective agent actions.
Figure 1: The overall TR-TURTLES architecture.
As mentioned in Section 3 a TeleoR program con-
sists of a set of guarded action rules, organised in pro-
cedures. In TR-TURTLES we follow a syntax that is
close to the one described in QuLog/TeleoR (Clark
and Robinson, 2003; Clark and Robinson, 2015), and
support many features introduced in the latter. The
sections that follow present TR-TURTLES in more de-
tail, starting with the guarded action rules description.
4.1 Guarded Action Rules
Probably the most important component of TR-
TURTLES is the guarded action rule that has the fol-
lowing form:
# Condition --> Actions ++ [Side Effects] .
A Condition is a possible conjunction (&) of strings,
each representing a potential match to a belief that ex-
ists in the Belief Store. Actions are string representa-
tions of NetLogo commands, i.e. the effectors of the
agent, possibly arranged for parallel or sequential ex-
ecution. Informally, an action can be either:
• A single action, e.g. "move-forward".
• A list of actions enclosed in "[" and
"]", executed in parallel, e.g ["blink"
"move-forward"]. Placing actions in such
a list implies that the modeler considers that such
actions can indeed be executed in parallel by the
agent: this is a modeling choice.
• Time sequenced actions (Clark and Robinson,
2015), in which the sequential operator is ":",
where each action is executed for N simulation
steps (ticks), before proceeding to the next
action in the list, e.g "blink" : ["blink"
"move-forward"] for 10 : "rotate" for
18 : "blink" : "move-forward" for 10.
• wait repeat actions, that in the case that an ac-
tion has not led to a change in the environment
that leads to a different rule firing, are control-
lably repeated, e.g. "ungrasp" wait-repeat 2
10, imposes that the action "ungrasp" will be
executed 10 times, with a 2 time units interval
between tries. After that time has elapsed, TR-
TURTLES will signal an error.
• a single procedure call.
For further clarification on how the above can be
combined, the grammar of TR-TURTLES is provided
in Fig. 2.
Side Effects are actions to be called at the end of
the execution rule, and in the case of TR-TURTLES,
can be any anonymous NetLogo command, even
adding a belief in the store (see Section 4.3), that
the agent would like to assert when an action is com-
pleted.
Procedures are collections of guarded action rules
under a name, that can be called as the single action
of a firing rule. Since, the latter do not terminate as in
ordinary languages, i.e. by returning a value, a change
in the belief base leads to a re-evaluation of the com-
plete procedure stack. The modeler has to state the
initial procedure to be activated, when the agent starts
its execution via the set-goal keyword.
4.2 Discrete and Durative Actions
Given that the NetLogo simulation environment sup-
ports the notion of a time unit (tick), typically advanc-
ing in each simulation cycle, we assume that a dis-
crete (or ballistic) action lasts for a single time tick,
i.e. a single simulation circle. On the other hand a
durative action can span its execution over multiple
cycles, i.e. creating a sequence of “discrete instances”
of the action that are executed until the rule is dese-
lected: we follow the approach stated by Lee & Dur-
fee (Lee and Durfee, 1994), where we consider as the
“characteristic frequency” of the execution cycle and
the environment to be equal, i.e. the simulation cycle
frequency.
This can have a number of interesting implica-
tions. A list of parallel actions, can contain both dis-
crete and durative actions. In the first execution of the
corresponding rule, all actions get executed in a singe
time step (thus in parallel), however, in subsequent
executions only durative actions in the list are exe-
cuted. Thus, an action list [a
d
1
, a
2
, a
d
3
, a
4
. . . a
d
k
] where
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
30

hTRProgrami ::= "tr-init" hBeliefsDi hActionDi hProceduresi
hBeliefsDi ::= "belief-update-function" hNetLogoProci
"beliefs" "[" hBeliefi
∗
"]"
hBeliefi ::= "string"
hActionDi ::= "durative-actions" "["hActionDescri
∗
"]"
"discrete-actions" "["hActionDescri
∗
"]"
hProceduresi ::= hProcedurei
+
"set-goal" hPNamei
hProcedurei ::= "procedure" hPNamei hGuardedRulei
∗
"end-procedure"
hPNamei ::= "string"
hGuardedRulei ::= hGuardi "--->" hActionsi ("++" hNetLogoProci)? "."
hGuardi ::= hBeliefi ("&" hBeliefi)
∗
| "true"
hActionsi ::= hAnotActioni | hPNamei
hAnotActioni ::= hActioni
| hActioni "wait-repeat" W R
| hActioni "for" N ( ":"hActioni( "for" N)?)
∗
hActioni ::= hActionDescri | "[" hActionDescri
+
"]"
hActionDescri ::= "string"
hNetLogoProci ::= Anonymous NetLogo Procedure Call
Figure 2: TR-TURTLES grammar. Note that W, R and N are integers.
a
d
i
, are durative actions, whereas a
j
are discrete, is in-
terpreted as a sequence of parallel actions of the form:
[a
d
1
, a
2
, a
d
3
, a
4
. . . a
d
k
]
t1
: [a
d
1
, a
d
3
, . . . a
d
k
]
t
2
: ··· :
[a
d
1
, a
d
3
, . . . a
d
k
]
t
m
where t
1
. . . t
m
are the consecutive time points the cor-
responding rule is active, i.e. no changes happened in
the belief base.
However, there is a crucial point that needs to be
addressed in the above. If a change in the belief store
did occur, and the same rule was selected once more,
there are two options in order to handle action execu-
tion: either (a) continue with the current set of actions,
as if no change occurred in the belief base, or (b) con-
sider the rule as a new instance, and start the execu-
tion of the sequence, once more, including discrete
actions. TR-TURTLES has adopted the first option (a)
as discussed in (Clark and Robinson, 2020).
Thus, it is important that the modeler clearly de-
fines the type of the corresponding action. This is
achieved by having action mode declarations in the
TR agent specification, listing each set of durative and
discrete actions (Fig. 2). For instance:
durative-actions ["move-forward" "rotate"]
discrete-actions ["ungrasp" "grasp" "blink"]
4.3 Agent Perception, Beliefs and
Updates
The handling of agent percepts must easily interface
the agent with the NetLogo environment, while sup-
porting the semantics of the TR approach. Thus, the
modeler has to provide a belief update command, and
include in the latter the detection of all the necessary
environment “events” that the agent should observe
(Fig. 1). Both the belief update function and the
set of beliefs (for type checking) have to be declared
in the TR-TURTLES program (Fig. 2). It should
be noted that the meta-interpreter expects a NetLogo
anonymous procedure in the declaration, in order to
be stored in the appropriate structure and called in
each cycle, automatically.
Upon the detection of such an environment event,
the modeler has to update the store with the corre-
sponding belief or inform the store that the specific
belief should be removed. This is achieved by two
commands that handle the belief addition/removal
(add-belief, no-belief respectively) in the store
and record whether a change occurred. For instance:
[add-belief "can-move-ahead"]
[no-belief "see-can"]
Currently, beliefs are represented as simple
strings. Not supporting the versatility variables can
offer, is indeed a major limitation of the current im-
plementation, and is one of the main future exten-
sions. However, adding variables poses a design
choice: although introducing logical variables “ala
Prolog”, i.e. single assignment variables taking val-
ues via unification is the current most widely applied
choice in agent languages (i.e. in Jason (Bordini et al.,
2007) for instance), this certainly lies outside the pro-
gramming vein that a NetLogo modeler is accustomed
to and might present a challenge to the latter. We
Teleo-Reactive Agents in a Simulation Platform
31

are currently investigating alternative design choices
to support more general belief representations.
Beliefs form the guard part of each rule and can
appear in conjunctions (Fig. 2). Currently, due to
the lack of variables and the finite number of be-
liefs to be handled (due to the declaration) the meta-
interpreter maintains in the store explicitly the truth
value of each belief. However, with the introduction
of variables, the approach adopted will most likely
follow the closed world assumption, although the ex-
plicit negated beliefs such as those in Jason could be
adopted.
4.4 Implementation
The TR-TURTLES meta-interpreter comes as a set of
files (*.nls) to be included in any NetLogo model.
This approach, allows users to deploy TR-TURTLES
agents in parallel with agents following any other ap-
proach in the same simulation environment, as long
as the model respects the semantics of the simulation
cycle. In order to support the syntax described in Fig.
2, each punctuation symbol corresponds to a NetLogo
reporter that builds the internal representation of the
guarded rules, to be executed by the meta-interpreter.
Currently, minimum type checking is performed in
the belief update functions. The TR program that the
modeler specifies is loaded once at the initialization
of the agent: all guarded rules are translated to anony-
mous NetLogo procedures and stored for later execu-
tion in a turtle variable. In each simulation cycle, the
meta-interpreter is invoked by “asking” the agent to
execute the top-level command execute-tr-rules,
provided by TR-TURTLES. The current implementa-
tion is publicly available in the GitHub repository
1
.
5 COLLECTING CANS: AN
ILLUSTRATIVE EXAMPLE
This section presents a simple simulation of an agent
collecting cans in a room that originally appeared in
(Dongol et al., 2010), slightly extended in order to
demonstrate the application of more complex rules. In
this simple setting, the agent collects cans in a room
to deposit them to a number of bins (depots). In or-
der to demonstrate the reactive features of the TR ap-
proach, depots move randomly inside the room and
switch with a specified frequency between two states,
those of accepting and not-accepting cans. However,
this state is invisible to the robotic agent, i.e. the agent
has no sensor to detect the state of the can, resulting
1
https://github.com/isakellariou/teleoTurtles
in some cases to a failed action, i.e. one that does
not change the environment. Robotic sensors for de-
tecting the location of cans and depots have a limited
range, implying that the robot has to engage in a wan-
dering behaviour in order to find the respective posi-
tions. Thus, a robotic agent has to locate a can, pick it
up, reach a depot, possibly follow it in case the depot
moves away and try (multiple times) to drop the can.
The TR code specifying the behaviour of the agent
is depicted in Fig. 3. All the TR-TURTLES code re-
garding single agent is inside a NetLogo procedure
(named in this case tr-code-of-robots), that is to
be called once during initialization of the respective
turtle in NetLogo.
The belief update function, that is called by
the TR-TURTLES meta-interpreter automatically in
each simulation cycle, is specified using the keyword
belief-update-function, followed by the belief
declarations in the next line. The meta-interpreter as-
sumes that the modeler will provide a NetLogo pro-
cedure under the name update-robot-beliefs, responsi-
ble for updating beliefs. For instance, in the example,
the agent detects within its field of view a depot and
populates the store with the corresponding belief, as
shown below:
to update-robot-beliefs
ifelse any? depots in-cone
view-distance view-angle
[add-belief "see-depot"]
[no-belief "see-depot"]
...
end
Given that the above procedure can contain any
NetLogo code, the modeler can encode any agent sen-
sors, thus providing full integration of TR-TURTLES
with the simulation environment. There are two
durative actions in the model, move-forward and
rotate that model motion. Discrete actions grasp
and ungrasp, control the robotic arm, while blink is
a dummy discrete action that changes the color of the
agent to indicate that it is in the process of delivering
a can. Each action is expected to appear as a NetLogo
procedure in the model.
Finally, TR rules in this simple example are
included in two procedures, the top-level one
(clean-cans) and wander, the latter implementing
the wandering behaviour of the agent in the cases that
it is holding a can or looking for a can. It is interesting
to note two rules in the above TR program. The first is
a wait-repeat rule that attempts to deliver the can by
trying the action ungrasp in 2 ticks intervals for ten
times, and the first rule of procedure wander, that is
a timed sequence of two actions (move-forward and
rotate) that generates a wandering behaviour. The
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
32
to tr-code-of-robots
tr-init
belief-update-function [[] -> update-robot-beliefs]
beliefs ["holding" "at-depot" "see-depot" "see-can" "touching" "can-move-ahead"]
durative-actions ["move-forward" "rotate"]
discrete-actions ["ungrasp" "grasp" "blink"]
procedure "clean-cans"
# "holding" & "at-depot" --> "ungrasp" wait-repeat 2 10
++ [[]-> show "At-deport - Delivered"] .
# "holding" & "see-depot" & "can-move-ahead" --> ["blink" "move-forward"] .
# "holding" --> "wander" .
# "touching" --> "grasp" .
# "see-can" & "can-move-ahead" --> "move-forward" .
# "true" --> "wander" .
end-procedure
procedure "wander"
# "can-move-ahead" --> "move-forward" for 2 : "rotate" for 1 .
# "true" --> "rotate".
end-procedure
set-goal "clean-cans"
end
Figure 3: The TR-TURTLES code for the robotic agent.
model’s code is publicly available
2
.
6 TR-Turtles EXECUTION
OVERHEAD
Naturally, introducing an execution layer above the
programming layer of NetLogo yields some perfor-
mance penalties. In order to evaluate these penalties
and assess the scalability of TR-TURTLES, the “Shep-
herds” NetLogo library model in TR-TURTLES was
implemented and compared with the implementation
provided in the distribution.
There were two sets of experiments carried on the
same models. One set is concerned with evaluating
the “core” library in terms of execution speed. In
this set all GUI elements (plots, environment updates)
were turned off, measuring the time (wall time) it
takes to execute 4000 time units (ticks) in the two ap-
proaches. Additionally, the first set evaluates through
a measure existing in the original “Shepherds” model,
whether the two models produce the same behaviour.
The second set of experiments measures execution
time under active GUI elements. The experiments
were conducted on a desktop machine with 8GB of
RAM, Intel i7-8700 CPU (4.60GHz) processor and
NetLogo 6.3.0.
For the first set, a varying number of “shepherds”
(TR agents) were introduced in the simulation and
for each such population one hundred different initial
environments were initialised, by setting the random
generator seed to specific values (ranging from 10 to
2
https://github.com/isakellariou/teleoTurtles
100, with step 10) and a varying number of sheep
(ranging from 50 to 500, with step 50). Each combi-
nation of environment/number of agents was executed
three times, creating a total, of 3000 experiments.
Results are presented in Table 1, where column
“Mean” depicts the average execution time, along
with its standard deviation (STD), whereas column
“Median” depicts the median value for experiments,
each for a different number of shepherds.
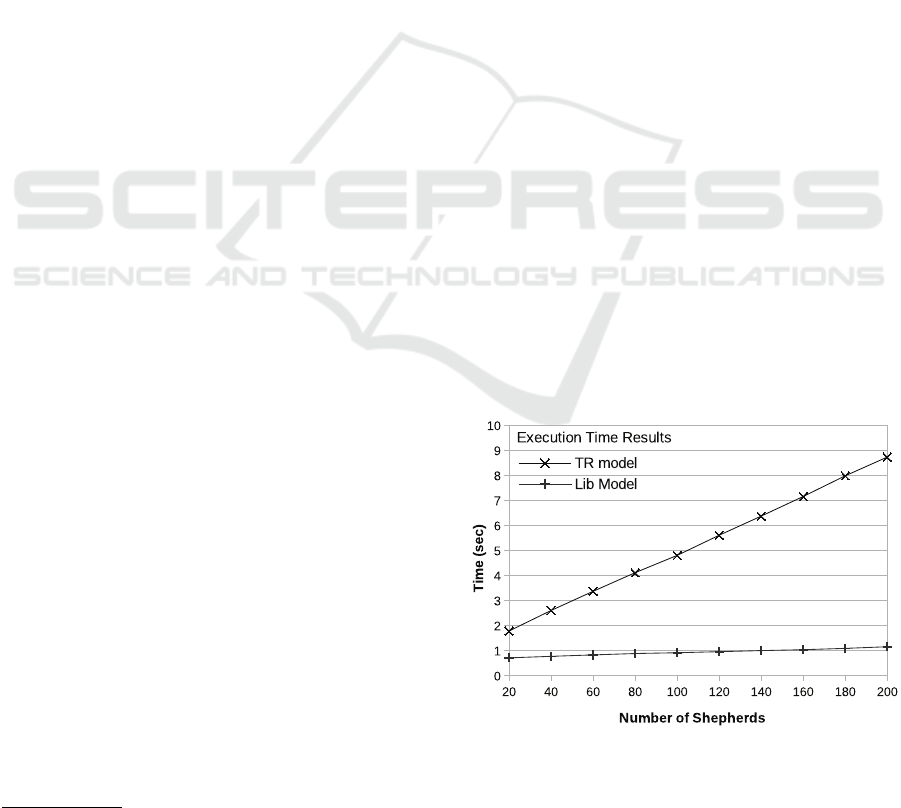
As expected, the TR-TURTLES meta-interpreter
introduces an overhead. However, the execution time
grows linearly with respect to the number of TR
agents, as shown in Fig. 4. The current implemen-
tation is not optimised in a number of ways: for in-
stance, type checking beliefs is done at runtime, in-
troducing a time penalty in every addition of a belief.
Figure 4: Execution time w.r.t. the number of agents in the
Shepherds model and diverse seed.
In order to access how close the two models are in
Teleo-Reactive Agents in a Simulation Platform
33
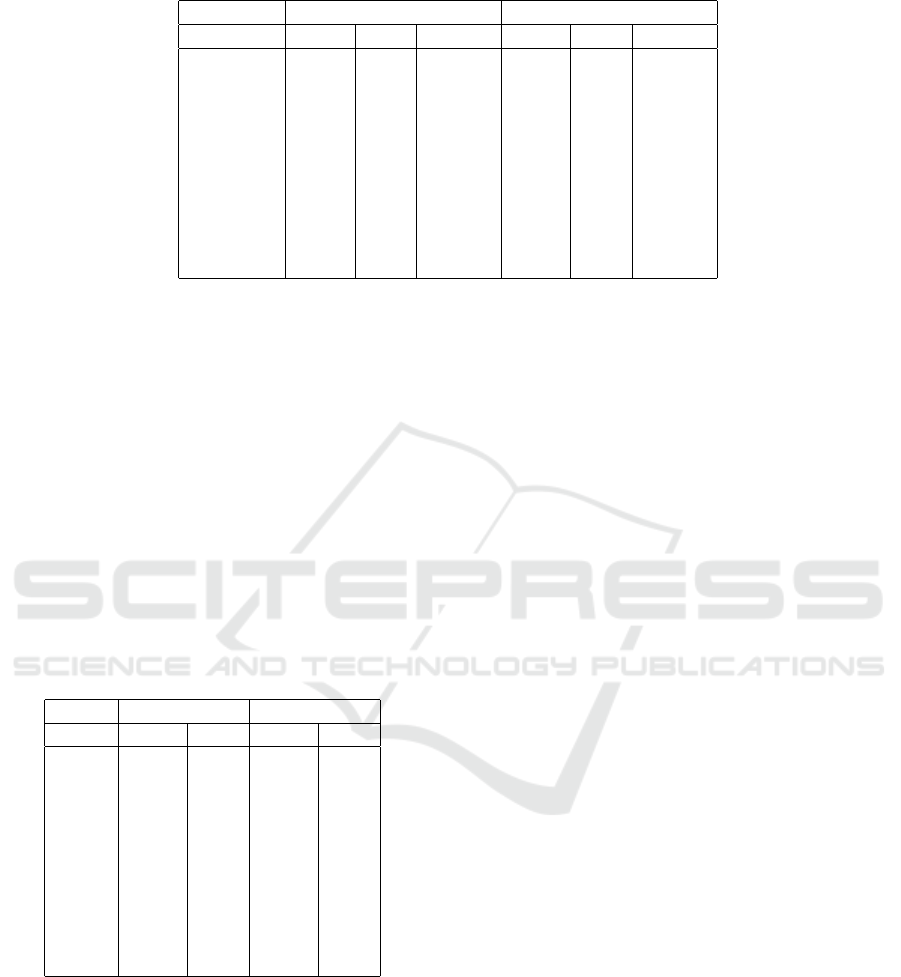
Table 1: Execution time (wall time in sec) results (no GUI elements,4000 ticks, diverse seed values and number of sheep).
Lib Model TR Model
Shepherds Mean STD Median Mean STD Median
20 0.71 0.13 0.71 1.78 0.23 1.79
40 0.77 0.13 0.77 2.60 0.27 2.61
60 0.83 0.12 0.83 3.37 0.29 3.37
80 0.88 0.13 0.88 4.11 0.32 4.13
100 0.91 0.12 0.91 4.80 0.36 4.81
120 0.95 0.12 0.95 5.61 0.37 5.62
140 1.00 0.12 1.00 6.37 0.40 6.40
160 1.03 0.12 1.03 7.15 0.46 7.19
180 1.09 0.12 1.08 7.98 0.50 8.01
200 1.15 0.13 1.14 8.73 0.58 8.76
terms of agent behaviour, we are using a measure that
exists in the original simulation, herding efficiency,
that is computed by counting the number of patches
that have no sheep in their neighborhood. As shown
in Table 2, herding efficiency results are very close,
an indication that the two models produce the same
behaviour. The large standard deviation reported in
experiments with a small number of agents, is at-
tributed to the fact that a small number of shepherds
in the model cannot efficiently handle a large number
of sheep. It is interesting to note that the standard de-
viation is very close in both versions of the model as
shown in the table.
Table 2: Efficiency (%) results in simulations with no GUI
elements (4000 ticks), diverse seed values and number of
sheep.
Lib Model TR Model
Sheph Mean STD Mean STD
20 84.19 6.97 84.17 7.06
40 90.46 3.80 90.14 3.88
60 92.83 2.48 92.98 2.55
80 94.06 1.81 94.18 1.81
100 94.53 1.56 94.30 1.48
120 94.55 1.30 94.51 1.28
140 94.69 1.23 94.55 1.21
160 94.68 1.34 94.76 1.31
180 94.42 1.34 94.51 1.14
200 94.38 1.33 94.37 1.51
However, in an interactive simulation environment
such as NetLogo, far more operations occur regard-
ing visualization and experiment monitoring. To pro-
vide an estimate of how, in such cases, a modeler
would perceive in terms of time penalty the use TR-
TURTLES, we conducted experiments in the same
simulation, however measuring time for a smaller
number of ticks. Results are summarized in Table 3
and show that in such interactive simulations, the ex-
ecution time difference is negligible, leading to the
conclusion that in these cases the time spend in other
operations taxes more the overall execution than the
introduction of the meta-interpreter.
This second set, also evaluates how close the two
models are, and as shown in Table 3, herding effi-
ciency results are very close, an indication that the
two models produce the same behaviour. The obser-
vant reader might notice that standard deviation is not
listed for the herding efficiency results, in this case:
all experiments were conducted with the same ran-
dom seed, yielding exactly the same value, attributed
to the “reproduciblity of experiments” property of
NetLogo.
7 CONCLUSIONS AND FUTURE
WORK
The introduction of new agent programming lan-
guages in ABMS simulation environments can be of
great importance, since it enables modelers to enrich
simulations with more complex agent behaviours.
Such richer models can indeed prove to be valu-
able in certain fields, since they alleviate the need
for model simplifications or increased programming
effort of complex models. To the above end, the
current work presents a first attempt to introduce
the Teleo-Reactive paradigm in NetLogo, offering a
meta-interpreter and extending the syntax of the un-
derlying platform to encode TR rules.
We consider that robotic agents have a number of
common characteristics with agents in a simulation
environment that has a spatial dimension. They both
share movement in a dynamic environment, possibly
non deterministic actions, require replanning and goal
monitoring, which is easily offered by the TR ap-
proach (and not so easily in a BDI approach to our
opinion). As a first example of its wider applicabil-
ity for general purpose case studies, we chose to re-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
34
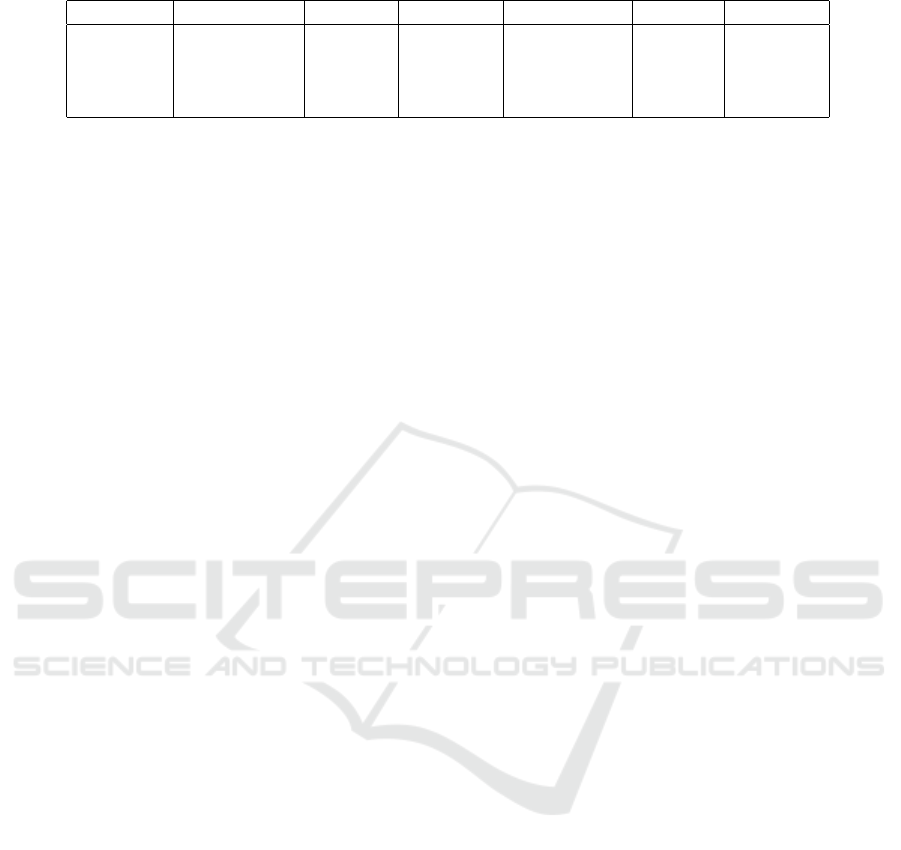
Table 3: Execution time (wall time in sec) results in simulations with GUI elements (1000 ticks).
Shepherds Lib Av. Time STD Lib Efficiency TR Av. Time STD TR Efficiency
50 34.26 0.034 71.35 34.32 0.026 71.06
100 34.29 0.026 82.43 34.27 0.036 81.4
150 34.39 0.037 85.57 34.33 0.055 87.07
200 34.29 0.015 88.44 34.24 0.009 86.37
implement the Shepherds model of the NetLogo li-
brary, however we plan to investigate on more models
in the future.
The current implementation can be extended in a
number of ways. The most important extension con-
cerns the introduction of rule variables that will al-
low encoding more complex agent behaviour. Such
an introduction demands extensive parsing machin-
ery, variable operations such as unification with pred-
icates in the belief base, in order to impose the nec-
essary semantics regarding variable scope and per-
form type checking as the QuLog/TeleoR language.
Another issue, concerns support for while/until rules
which TR-TURTLES lacks. Reducing the execution
overhead of the current TR approach, by identifying
and introducing optimizations is also an important re-
search direction, that can be significant when dealing
with large scale simulations. Finally, exploring in-
tegration of the TR paradigm with other approaches,
such as BDI, as in (Coffey and Clark, 2006), can lead
to a number of interesting research results.
As a final note, ABMS platforms can provide an
excellent testbed for investigating issues with respect
to agent programming languages, since they offer
rapid creation complex environments to test ideas on
the latter.
REFERENCES
Abar, S., Theodoropoulos, G. K., Lemarinier, P., and
O’Hare, G. M. (2017). Agent based modelling and
simulation tools: A review of the state-of-art software.
Computer Science Review, 24:13–33.
Adam, C. and Gaudou, B. (2016). Bdi agents in social sim-
ulations: a survey. The Knowledge Engineering Re-
view, 31(3):207–238.
Bordini, R. H., H
¨
ubner, J. F., and Wooldridge, M. (2007).
Programming multi-agent systems in AgentSpeak us-
ing Jason. John Wiley & Sons.
Bourgais, M., Taillandier, P., and Vercouter, L. (2020).
Ben: An architecture for the behavior of social agents.
Journal of Artificial Societies and Social Simulation,
23(4):12.
Brooks, R. (1986). A robust layered control system for a
mobile robot. IEEE Journal on Robotics and Automa-
tion, 2(1):14–23.
Bulumulla, C., Singh, D., Padgham, L., and Chan, J. (2022).
Multi-level simulation of the physical, cognitive and
social. Computers, Environment and Urban Systems,
93:101756.
Cardoso, H. L. (2015). Sajas: Enabling jade-based sim-
ulations. In Nguyen, N. T., Kowalczyk, R., Duval,
B., van den Herik, J., Loiseau, S., and Filipe, J., ed-
itors, Transactions on Computational Collective In-
telligence XX, pages 158–178. Springer International
Publishing, Cham.
Clark, K. L. and Robinson, P. J. (2003). Qulog: A flexibly
typed logic based language with function and action
rules. Technical report, Imperial College London.
Clark, K. L. and Robinson, P. J. (2015). Robotic agent pro-
gramming in teleor. In 2015 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
5040–5047.
Clark, K. L. and Robinson, P. J. (2020). Chapter 3: in-
troduction to qulog. Programming Communicating
Robotic Agents: A Multi-tasking Teleo-Reactive Ap-
proach.
Coffey, S. and Clark, K. (2006). A hybrid, teleo-reactive
architecture for robot control. In Proceedings of the
2nd International Workshop on Multi-Agent Robotic
Systems - Volume 1: MARS, (ICINCO 2006), pages
54–65. INSTICC, SciTePress.
Collier, N. and North, M. (2013). Parallel agent-based sim-
ulation with repast for high performance computing.
SIMULATION, 89(10):1215–1235.
Dongol, B., Hayes, I. J., and Robinson, P. J. (2010). Reason-
ing about real-time teleo-reactive programs. Techni-
cal report, The University of Queensland, QLD, 4072,
Australia.
Garc
´
ıa, E., Rodr
´
ıguez, S., Mart
´
ın, B., Zato, C., and P
´
erez,
B. (2011). Misia: Middleware infrastructure to sim-
ulate intelligent agents. In Abraham, A., Corchado,
J. M., Gonz
´
alez, S. R., and De Paz Santana, J. F., ed-
itors, International Symposium on Distributed Com-
puting and Artificial Intelligence, pages 107–116,
Berlin, Heidelberg. Springer Berlin Heidelberg.
Gormer, J., Homoceanu, G., Mumme, C., Huhn, M., and
Muller, J. P. (2011). Jrep: Extending repast sim-
phony for jade agent behavior components. In 2011
IEEE/WIC/ACM International Conferences on Web
Intelligence and Intelligent Agent Technology, vol-
ume 2, pages 149–154.
Harwood, C. (1998). Correct Systems: Building a Business
Process Solution, page 206. Springer London.
Horni, A., Nagel, K., and Axhausen, K. W. (2016). The
Multi-Agent Transport Simulation MATSim. Ubiquity
Press, London, GBR.
Teleo-Reactive Agents in a Simulation Platform
35

Kowalski, R. A. and Sadri, F. (2012). Teleo-reactive abduc-
tive logic programs. In Logic Programs, Norms and
Action: Essays in Honor of Marek J. Sergot on the
Occasion of His 60th Birthday, pages 12–32. Springer
Berlin Heidelberg, Berlin, Heidelberg.
Kravari, K. and Bassiliades, N. (2015). A survey of agent
platforms. Journal of Artificial Societies and Social
Simulation, 18(1):11.
Lee, J. and Durfee, E. H. (1994). Structured circuit seman-
tics for reactive plan execution systems. In Proceed-
ings of the Twelfth AAAI National Conference on Arti-
ficial Intelligence, AAAI’94, page 1232–1237. AAAI
Press.
Luna-Ramirez, W. A. and Fasli, M. (2018). Bridging the
gap between abm and mas: A disaster-rescue simula-
tion using jason and netlogo. Computers, 7(2).
Morales, J. L., S
´
anchez, P., and Alonso, D. (2014).
A systematic literature review of the teleo-reactive
paradigm. Artificial Intelligence Review, 42(4):945–
964.
Nilsson, N. (1993). Teleo-reactive programs for agent con-
trol. Journal of artificial intelligence research, 1:139–
158.
Nilsson, N. J. (2001). Teleo-reactive programs and the
triple-tower architecture. Electron. Trans. Artif. In-
tell., 5(B):99–110.
North, M. J., Collier, N. T., Ozik, J., Tatara, E. R., Macal,
C. M., Bragen, M., and Sydelko, P. (2013). Com-
plex adaptive systems modeling with repast simphony.
Complex Adaptive Systems Modeling, 1(1):3.
Ozik, J., Collier, N., Combs, T., Macal, C. M., and North,
M. (2015). Repast simphony statecharts. Journal of
Artificial Societies and Social Simulation, 18(3):11.
Padgham, L., Nagel, K., Singh, D., and Chen, Q. (2014). In-
tegrating bdi agents into a matsim simulation. In Pro-
ceedings of the Twenty-First European Conference on
Artificial Intelligence, ECAI’14, page 681–686, NLD.
IOS Press.
Padgham, L., Scerri, D., Jayatilleke, G., and Hickmott, S.
(2011). Integrating bdi reasoning into agent based
modeling and simulation. In Proceedings of the 2011
Winter Simulation Conference (WSC), pages 345–356.
Railsback, S. F., Lytinen, S. L., and Jackson, S. K. (2006).
Agent-based simulation platforms: Review and devel-
opment recommendations. SIMULATION, 82(9):609–
623.
Rao, A. S., Georgeff, M. P., et al. (1995). Bdi agents: from
theory to practice. In Proceedings of the First In-
ternational Conference on Multi-Agent Systems (IC-
MAS95), volume 95, pages 312–319. Association for
the Advancement of Artificial Intelligence.
Robinson, P. J., Hinchey, M., and Clark, K. (2003). Qu-
prolog: An implementation language for agents with
advanced reasoning capabilities. In Formal Ap-
proaches to Agent-Based Systems, pages 162–172,
Berlin, Heidelberg. Springer Berlin Heidelberg.
Sakellariou, I. (2012). TURTLES AS STATE MACHINES
- Agent Programming in NetLogo using State Ma-
chines:. In Proceedings of the 4th International Con-
ference on Agents and Artificial Intelligence, pages
375–378, Vilamoura, Algarve, Portugal. SciTePress -
Science and and Technology Publications.
Sakellariou, I., Dranidis, D., Ntika, M., and Kefalas, P.
(2015). From formal modelling to agent simulation
execution and testing. In Proceedings of the Inter-
national Conference on Agents and Artificial Intelli-
gence - Volume 1, ICAART 2015, page 87–98, Se-
tubal, PRT. SCITEPRESS - Science and Technology
Publications, Lda.
Sakellariou, I., Kefalas, P., and Stamatopoulou, I. (2008).
Enhancing netlogo to simulate bdi communicating
agents. In Artificial Intelligence: Theories, Models
and Applications, pages 263–275, Berlin, Heidelberg.
Springer Berlin Heidelberg.
Singh, D., Padgham, L., and Logan, B. (2016). Integrat-
ing BDI Agents with Agent-Based Simulation Plat-
forms. Autonomous Agents and Multi-Agent Systems,
30(6):1050–1071.
S
´
anchez, P.,
´
Alvarez, B., Mart
´
ınez, R., and Iborra, A.
(2017). Embedding statecharts into teleo-reactive pro-
grams to model interactions between agents. Journal
of Systems and Software, 131:78–97.
Staples, J., Robinson, P. J., Paterson, R. A., Hagen, R. A.,
Craddock, A. J., and Wallis, P. C. (1989). Qu-
prolog: An extended prolog for meta level program-
ming. In Meta-Programming in Logic Programming,
page 435–452. MIT Press, Cambridge, MA, USA.
Taillandier, P., Gaudou, B., Grignard, A., Huynh, Q.-N.,
Marilleau, N., Caillou, P., Philippon, D., and Dro-
goul, A. (2019). Building, composing and experi-
menting complex spatial models with the gama plat-
form. GeoInformatica, 23(2):299–322.
Tisue, S. and Wilensky, U. (2004). Netlogo: Design and
implementation of a multi-agent modeling environ-
ment. In Proceedings of the Agent 2004 Confer-
ence on Social Dynamics: Interaction, Reflexivity and
Emergence, volume 2004. Argonne National Labora-
tory and University of Chicago.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
36
