Unifying Human Motion Synthesis and Style Transfer with Denoising
Diffusion Probabilistic Models
Ziyi Chang
a
, Edmund J. C. Findlay, Haozheng Zhang and Hubert P. H. Shum
∗ b
Department of Computer Science, Durham University, Durham, U.K.
{ziyi.chang, edmund.findlay, haozheng.zhang, hubert.shum}@durham.ac.uk
Keywords:
Diffusion Model, Animation Synthesis, Human Motion.
Abstract:
Generating realistic motions for digital humans is a core but challenging part of computer animations and
games, as human motions are both diverse in content and rich in styles. While the latest deep learning ap-
proaches have made significant advancements in this domain, they mostly consider motion synthesis and style
manipulation as two separate problems. This is mainly due to the challenge of learning both motion con-
tents that account for the inter-class behaviour and styles that account for the intra-class behaviour effectively
in a common representation. To tackle this challenge, we propose a denoising diffusion probabilistic model
solution for styled motion synthesis. As diffusion models have a high capacity brought by the injection of
stochasticity, we can represent both inter-class motion content and intra-class style behaviour in the same la-
tent. This results in an integrated, end-to-end trained pipeline that facilitates the generation of optimal motion
and exploration of content-style coupled latent space. To achieve high-quality results, we design a multi-task
architecture of diffusion model that strategically generates aspects of human motions for local guidance. We
also design adversarial and physical regulations for global guidance. We demonstrate superior performance
with quantitative and qualitative results and validate the effectiveness of our multi-task architecture.
1 INTRODUCTION
The generation of realistic human motions has been
an important but challenging task in computer graph-
ics and vision. Compared to motion capture, gener-
ating motions allows obtaining data with affordable
cost and abundant amount. Furthermore, the gener-
ated motions have a wide range of potential applica-
tions, e.g. making animations and games. As human
motions are inherently diverse in both contents and
styles, generating realistic motions is also challeng-
ing. For example, realistic human motions have a va-
riety of contents, such as walking and running. Even
within each content, motions vary from each other,
e.g. strutting walking and depressed walking.
While recent years have witnessed some signif-
icant advances made by many deep learning ap-
proaches towards this domain, these approaches
mainly consider motion synthesis and style manipu-
lation as two separate tasks. Approaches to motion
synthesis are usually concentrated on the generation
of various contents (Holden et al., 2017; Mourot et al.,
a
https://orcid.org/0000-0003-0746-6826
b
https://orcid.org/0000-0001-5651-6039
∗
Corresponding author.
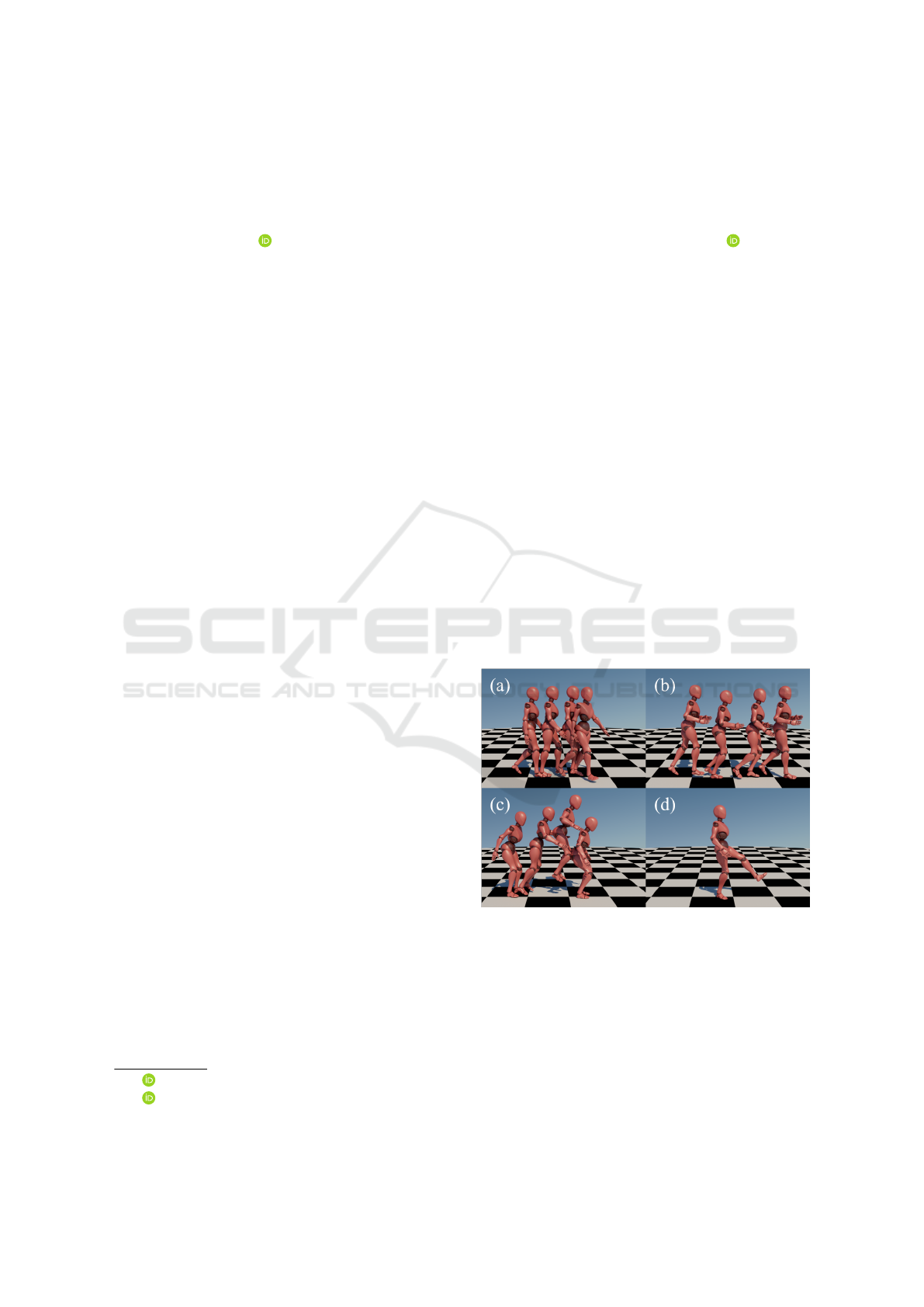
Figure 1: Sampled results. (a) is walking. (b) is running.
(c) is proud jumping. (d) is angry kicking.
2022), while the style transferring approaches focus
on the manipulation of motion styles (Aberman et al.,
2020; Ye et al., 2021). Although methods from the
two separate tasks can be sequentially applied, the
generated motions are likely to be better if the com-
mon space is modelled jointly.
The main challenge of generating realistic human
motions is to effectively model the inter-class (i.e.
content) and intra-class (i.e. style) behaviours in a
64
Chang, Z., Findlay, E., Zhang, H. and Shum, H.
Unifying Human Motion Synthesis and Style Transfer with Denoising Diffusion Probabilistic Models.
DOI: 10.5220/0011631000003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 1: GRAPP, pages
64-74
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

common representation. Human motions are com-
posed of contents and styles (Aberman et al., 2020).
The difference in contents dominates different inter-
class behaviours, while the variation of styles ac-
counts for the various intra-class motion behaviours.
Modelling inter-class and intra-class behaviours of
realistic human motions requires neural networks to
learn a common representation in the latent space.
The underlying distribution of such a latent space is
greatly wider than that of modelling only one compo-
nent, as both content and styles are inherently diverse.
The increased diversity of data requires a higher ca-
pacity in neural networks to model the potential prob-
abilistic distributions. However, traditional methods
can only focus on learning the distribution of one
component due to the limited capacity of their gen-
erative models (Bond-Taylor et al., 2021) as they suf-
fer from sequential generation (Martinez et al., 2017),
mode collapse (Dong et al., 2020), prior distribution
assumption (Ling et al., 2020) or specially-designed
architecture (Henter et al., 2020).
We propose a diffusion-based solution to unify
human motion synthesis and style transfer. Because
its mode coverage ability is wider than other previ-
ous neural networks, it is beneficial to model content
and style in a common representation. Specifically,
denoising diffusion probabilistic model (DDPM) is
a diffusion-based generative model with high capac-
ity due to the injection of stochasticity in the learn-
ing process, which is inspired by non-equilibrium
thermodynamics in physics. To achieve high-quality
motion synthesis and style-transfer results, we de-
sign a multi-task DDPM architecture that strategi-
cally models different aspects of realistic human mo-
tions, including joint angles, global movement trajec-
tories, supporting foot patterns and physical regula-
tions. Compared to the original DDPM (Ho et al.,
2020), the multi-task architecture in our design in-
creases the ability to model the data structure of hu-
man motions. Apart from only predicting the noise,
our multi-task architecture further predicts other as-
pects of human motions with additional neural net-
works. To enhance the synthesized motions to be re-
alistic globally, we also leverage adversarial training
to coordinate different predictions from multiple tasks
and ensure them to be harmonious with each other.
In addition to adversarial regulation, we also leverage
physical regulations to achieve global coherent mo-
tions.
We demonstrate the superior performance of our
proposed solution by both quantitative and qualitative
experiments on the dataset proposed by (Xia et al.,
2015) and validate the effectiveness of our design by
ablation study. In addition, the Fr
´
echet inception dis-
tance (FID) (Heusel et al., 2017) has been reported
to measure the distribution difference between the
original and generated motion datasets. Our method
achieves the lowest FID, signifying superior perfor-
mance. We also provide several synthesized results
by figures to show the quality of our method. We also
validate different components of our multi-task archi-
tecture by ablation study.
An existing work presents preliminary results of
synthesizing human motions by diffusion models
(Findlay et al., 2022) where a barebone prototype
to show the potential feasibility that walking motion
with different styles can be synthesised with diffu-
sion models. However, (Findlay et al., 2022) suf-
fers from low motion quality in non-walking motion
due to the simple network design. In this paper, we
present an improved solution that is capable of gen-
erating high-quality motion of different contents with
styles. Furthermore, we showcase the improvement
over (Findlay et al., 2022) in our experiments. This
paper presents the following contributions:
• We present a single-stage pipeline unifying hu-
man motion synthesis and style transfer for
high-quality motion creation. The source
code is open on https://github.com/mrzzy2021/
StyledMotionSynthesis
• To effectively represent the coupled representa-
tion of both inter-class motion contents and intra-
class motion styles in a common latent space, we
propose a denoising diffusion probabilistic model
solution that has a large learning capacity for
modelling the diverse data structure.
• To generate high-quality results, we propose a
multi-task network architecture that leverages
both local guidance, including joint angles, move-
ment trajectories and supporting foot patterns, and
global guidance, including physical and adversar-
ial regulations.
2 RELATED WORK
Our work is mainly related to two research fields, neu-
ral motion generation and generative models. First,
we will review the recent advances in neural motion
generation, mainly including human motion synthesis
and motion style transfer. In the generative models
part, we will mainly discuss diffusion models.
2.1 Neural Motion Generation
Most motion synthesis works are prediction-based.
Given a past pose or partial sequence, a model will
Unifying Human Motion Synthesis and Style Transfer with Denoising Diffusion Probabilistic Models
65

predict future poses. Recent advances in deep gen-
erative models such as Generative Adversarial Net-
works (GANs), Variational Autoencoders (VAEs),
long short-term memory (LSTM) models and Flow-
based models have seen a strong performance with
this approach (Mourot et al., 2022).
MoGlow (Henter et al., 2020) used an LSTM-
based normalising flow model inspired by recent ap-
plications of such models to video predicting. When
provided with a context of previous poses and a con-
trol signal containing the character’s future angular
velocity, the model can generate the next pose in the
sequence. Characters can accurately follow various
trajectories for long and short-term motions by using
this approach. However, this method can only gener-
ate the motions one frame at a time, which is not ideal
for real-time applications such as computer graphics.
The generated motions are diverse but often suffer in-
accuracies, such as foot sliding and joint crossover.
Wen et al. also show that this model architecture per-
forms strongly for unsupervised motion style trans-
fer. Although the results of flow-based models are
promising, they are often parameter inefficient com-
pared to other generative models such as GANs.
Improving on the control signals from MoGlow
(Henter et al., 2020) for human locomotion, Ling et
al. propose Motion VAEs (Ling et al., 2020). Us-
ing a two-stage approach, the authors first train an en-
coder and mixture-of-experts decoder on the pose se-
quences dataset of locomotion data. They then train
a reinforcement learning algorithm to predict the la-
tent space input to be passed to the decoder based
on the previous pose and a control signal. The final
method is able to control a character using a joystick
as well as by providing a trajectory or a target. Adding
noise during the second stage training process allows
for diversity when generating controlled inputs. How-
ever, the algorithm demonstrates bias since the gener-
ated data tend to have right-side behaviour whilst the
training data contains equal amounts of right and left-
handed data.
The action-conditioned motion generation is typ-
ically considered a more difficult task than motion
prediction-based synthesis since less input informa-
tion is supplied to the model. The Text2Action (Ahn
et al., 2018) uses a recurrent neural network (RNN)
encoder to take a sentence as input and output an em-
bedding. This embedding is then used to condition
a generator RNN which will output a motion based
on the original sentence. A separate recurrent dis-
criminator is also trained to minimise perceptual dif-
ferences between generated motion and the training
data. The system struggled to achieve sufficient qual-
ity motions when trained end-to-end and relied on
a multistage training procedure. ACTOR (Petrovich
et al., 2021) builds on Text2Action by introducing
a transformer-based VAE approach. Different from
(Ahn et al., 2018), this method does not require mul-
tistage training and the training is more stable as it is
not adversarial. The transformer will generate the ap-
propriate pose sequence when supplied with the de-
sired action. This model significantly outperforms
their baseline gated recurrent unit (GRU) model on
multiple datasets. Due to the autoregressive nature of
the decoder, the method can be adapted to generate
actions of varying lengths.
2.2 Diffusion Models
Diffusion models are firstly proposed by (Sohl-
Dickstein et al., 2015) for data modelling. The dif-
fusion phenomenon is driven by a stochastic dynamic
system in physics and destroys the original data struc-
ture. Aiming to model the diffusion and its reverse
process, (Sohl-Dickstein et al., 2015) proposes diffu-
sion models and uses a neural network to recover the
data distribution. (Sohl-Dickstein et al., 2015) uses
the variational lower bound to optimize the negative
log-likelihood of diffusion models.
The denoising diffusion probabilistic model
(DDPM) is firstly proposed by (Ho et al., 2020). In-
stead of using variational lower bound, (Ho et al.,
2020) simplifies the loss function by predicting the
added noise. As reported by (Ho et al., 2020), pre-
dicting the added noise achieves better results than
predicting the intermediate data. Many improvements
have also been proposed to DDPM. (Nichol and
Dhariwal, 2021) proposes to predict the covariance
matrix during the reverse process and implements a
cosine noise schedule instead of a linear schedule.
(Dhariwal and Nichol, 2021) proposes a guidance-
based diffusion model where auxiliary classifiers have
been pre-trained to provide guidance to the genera-
tion. (Song et al., 2020) proposes a denoising dif-
fusion implicit model (DDIM) to accelerate the sam-
pling speed of DDPM. (Kawar et al., 2022) proposes
a denoising diffusion restoration model (DDRM) to
specialize DDPM in image restoration problems.
Hybrid approaches which combine a DDPM with
another type of generative model (e.g., VAEs or
GANs) have shown early promise in addressing the
issues with diffusion models. (Vahdat et al., 2021)
propose to train a VAE and then train a diffusion
model in the latent space. This method surpasses all
previous diffusion models when trained on image data
and only requires around 100 sampling steps due to
the reduced complexity of the latent space compared
to the original data. However, training both models is
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
66

a multistage process as the VAE needs to be trained
separately and then trained with the diffusion model.
It results in more computational resources than a stan-
dard diffusion model to achieve these results. Denois-
ing diffusion GANs (Xiao et al., 2021) use a reformu-
lation of the diffusion process where the original data
is estimated instead of the noise added. As a result,
the model is less prone to mode collapse than GAN
models and is also more stable to train. However, the
quality of the generated samples is still slightly lower
than those generated by previous diffusion models.
Most recently, diffusion models have achieved im-
pressive results for text-to-image generation. GLIDE
(Nichol et al., 2021) uses an encoding transformer to
input a caption to a diffusion model. Imagen (Saharia
et al., 2022) proposes to leverage generic large lan-
guage models that are pretrained on text-only corpora
for text-to-image translation. DALLE-2 (Ramesh
et al., 2022) proposes a two-stage model for text-
guided image generation. Their two stages include
a prior that generates a CLIP image embedding given
a text caption, and a decoder that generates an image
conditioned on the image embedding. Such models
for text-to-image transition usually are large. For ex-
ample, (Nichol et al., 2021) has 3.5 billion parameters
in size and is extremely computationally intensive to
train. However, when combined with another 1.5 bil-
lion parameters, the upsampling diffusion model can
generate high-resolution samples when provided with
a text input.
Diffusion models have excelled at a range of tasks
on many different data domains. They offer many
benefits over other model classes, providing both
high-quality and highly diverse samples at the cost of
sampling time. However, despite their success, they
have not yet been applied to motion data.
3 METHODOLOGY
Generating realistic human motions is challenging
due to the diversity of the common representation for
the coupled content-style information. Motions are
composed of inter-class contents and intra-class styles
(Aberman et al., 2020). Previous methods do not have
sufficient learning capacity for modelling the coupled
representation in a common latent space, such that
they learn content and style modelling separately as
motion synthesis and style transfer. However, sepa-
rating as two tasks usually results in sub-optimal mo-
tions and under-explored joint distribution space.
To tackle the challenge, we propose our denoising
diffusion probabilistic model (DDPM) solution for
styled motion synthesis as shown in Figure 2. DDPM
is a diffusion-based generative model that injects and
removes Gaussian noise progressively. The introduc-
tion of stochasticity in the learning process brings a
larger capacity to the neural network. Compared to
previous methods, DDPM is a more suitable candi-
date for styled motion synthesis as it does not suf-
fer from the lack of generation diversity. Our pro-
posed DDPM solution facilities an integrated, end-to-
end framework with increased learning capacity. The
motion creation benefits more from our single-stage
pipeline when compared to previously two-stage so-
lutions. The integration enables direct optimization
over the joint common representation space, and the
underlying manifold is better explored to obtain better
performance.
The training process of our proposed pipeline
shown in Figure 2 is designed to be a multi-task archi-
tecture. The pipeline is optimized over a set of pre-
dictions on different motion aspects, including joint
angles, foot patterns, global movements and physical
regulations. Additionally, a discriminator is applied
for adversarial optimization over our pipeline.
We unify human motion synthesis and style trans-
fer into our proposed end-to-end pipeline. The frame-
work leverages DDPM to increase the learning ca-
pacity to model the diversity in motion data. The ar-
chitecture of our proposed pipeline is designed to be
multi-task with a set of corresponding auxiliary losses
for a high-quality generation.
3.1 Problem Formulation
Generating realistic human motions is an important
but challenging task. Modelling human motions re-
quires the neural network to learn the inter-class mo-
tion contents and the intra-class motion styles simul-
taneously. The joint distribution of contents and styles
describes the underlying motion manifold in the latent
space. However, the great diversity of both human
contents and styles demands a high learning capacity
of neural networks to maintain generation diversity,
leading to a separate treatment in previous studies.
We propose a new problem called styled motion
synthesis from an integration view and a framework,
as shown in Figure 3. Previous studies have been
conducted in developing neural networks for human
motion synthesis or motion transfer, separately. The
lack of unification formulation brings incoordination
across neural networks in practice, undermining the
quality of generated results. Instead of optimizing
separate neural networks for human motion synthesis
and motion style transfer, the new problem concerns
the integration of the two tasks. Styled motion syn-
thesis demands a neural network to generate motions
Unifying Human Motion Synthesis and Style Transfer with Denoising Diffusion Probabilistic Models
67
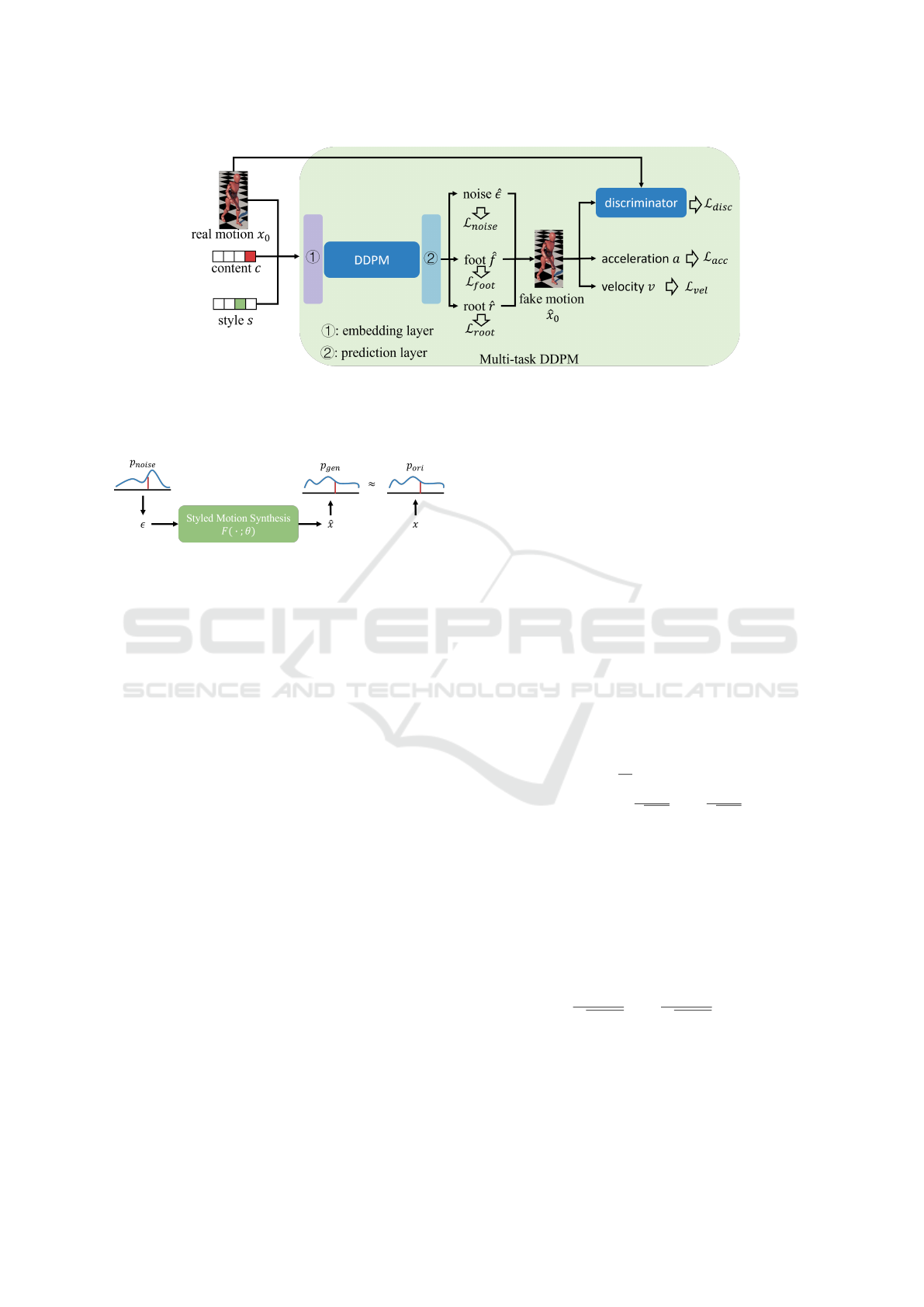
Figure 2: An overview of our proposed framework.
with styles from noise distribution that is easy to sam-
ple from in an end-to-end manner.
Figure 3: Our proposed end-to-end framework for the styled
motion synthesis task.
To formally propose this problem, we provide a
formulation. Let x and ˆx be our original motion data
of all frames and generated motion data of all frames,
respectively. The distributions of the original motion
and generated motion are denoted as p
ori
and p
gen
.
The neural network F(·) in styled motion synthesis
starts from a noise ε that is sampled from a distribu-
tion p
noise
and generates ˆx that follows the distribution
of original data x. Styled motion synthesis is formu-
lated as follows:
ˆx = F(ε;θ) ∼ p
gen
≈ p
ori
, (1)
where the noise is sampled from the noise distribu-
tion ε ∼ p
noise
and θ denotes the parameters to be op-
timized in the neural network F(·).
3.2 DDPM Backbone
We propose to use the denoising diffusion probabilis-
tic model since it has the potential to possess enough
capacity to model diversity compared with existing
works. Realistic human motions are inherently di-
verse as motions differ from each other in terms of the
inter-class contents and the intra-class styles. Mod-
elling motions requires a larger capacity of networks
in data modelling. Previous methods such as (Aber-
man et al., 2020) only focus on modelling one com-
ponent as their networks are limited in capacity. This
limitation usually leads to a lack of diversity in their
generated results.
Compared with the existing methods, the de-
noising diffusion probabilistic model (DDPM) (Sohl-
Dickstein et al., 2015; Ho et al., 2020) has an in-
creased learning capacity due to the stochasticity in-
troduced in the neural network. DDPM is essen-
tially designed to formulate the generation process as
a stochastic system. Both the injection and noise re-
moval are designed to be tractable for changing prob-
abilistic distributions. In addition, the stochastic char-
acteristic in DDPM extends the exploration scope of
the latent space, facilitating the network to model data
diversity.
The training process of DDPM is designed to
gradually inject (the first line in Eq. 2) and re-
move (the second line in Eq. 2) a Gaussian noise
ε ∼N (0, I) to the input data x
0
= x within t diffusion
steps. The optimization (see the third line in Eq. 2) is
based on minimizing the prediction of what noise has
been added. The whole training process is formulated
as follows:
p
t
(x
t
|x
0
) = N (x
t
;
√
¯
σ
t
x
0
, (1 −
¯
σ
t
)I),
p
t
(x
t−1
|x
t
) = N (x
t−1
;
1
√
1−σ
t
(x
t
−
σ
t
√
1−
¯
σ
t
ˆ
ε), σ
t
I),
L =
E
t,x
0
,ε
||ε −
ˆ
ε||
2
2
,
(2)
where σ
t
∈(0, 1) is the noise schedule,
¯
σ
t
=
∏
t
i=1
1 −
σ
i
,
ˆ
ε is the prediction of the neural network and L
is the loss function of DDPM in (Ho et al., 2020).
When training is completed, the generation process
starts from an isotropic Gaussian noise x
T
∼ N (0, I)
and iteratively compute the previous state x
t−1
over T
diffusion steps, which is formulated as:
x
t−1
=
1
√
1 −σ
t
(x
t
−
σ
t
√
1 −
¯
σ
t
ˆ
ε) + σz, (3)
where z ∼ N (0, I) is a Gaussian noise.
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
68
3.3 Multi-Task DDPM for Styled
Motion Synthesis
3.3.1 Local Guidance
To achieve high-quality generated results, we propose
to leverage a multi-task DDPM architecture for styled
human motion synthesis. Directly applying DDPM
to motion synthesis does not produce high-quality re-
sults due to the lack of consideration of other inherent
aspects of motions, such as foot patterns.
Our proposed multi-task design considers the op-
timization of trajectory movements, foot patterns and
joint angle predictions, while the original DDPM only
minimizes the difference between the predicted noise
and the ground truth noise. We provide DDPM with
extra guidance from other aspects of motion by the
proposed multi-task design. With such guidance, the
learnt distribution of coupled contents and styles is
close to the manifold of realistic motions in the com-
mon latent space.
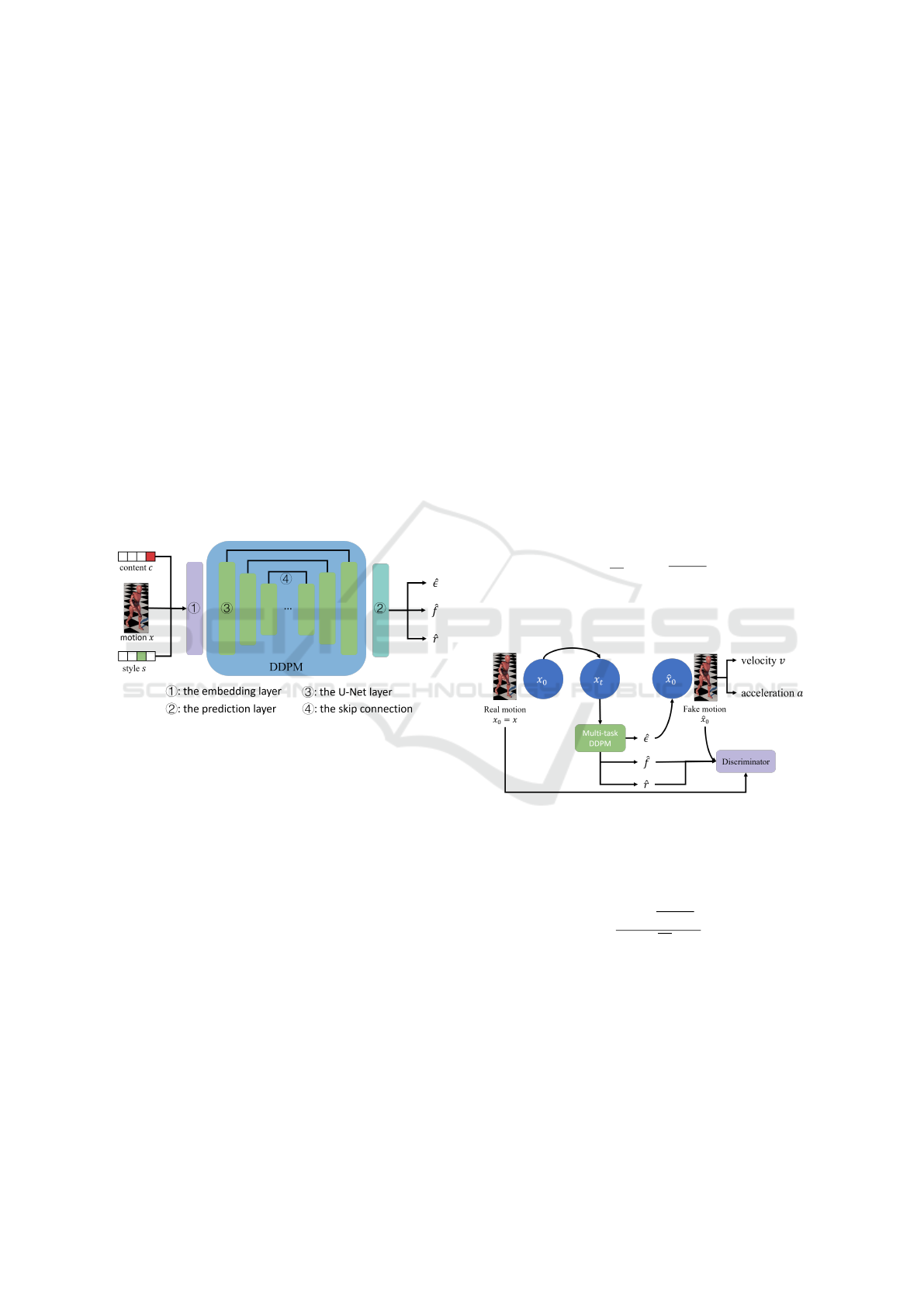
Figure 4: Our proposed multi-task DDPM pipeline for
styled motion synthesis.
As shown in Figure 4, our multi-task DDPM takes
a motion clip x
0
= x, the content c and the style s
as inputs. We represent the motion x with joint an-
gles. Both the content c and the style s are converted
into one-hot embeddings with embedding layers be-
fore they are used in DDPM. We apply the U-Net with
attention and skip connections in our DDPM to model
the manifold conformed by motions x, the inter-class
contents c and the intra-class styles s.
Our multi-task DDPM produces estimation on the
noise
ˆ
ε, global movements ˆr and supporting foot pat-
terns
ˆ
f based on the three inputs. For supporting foot
patterns, we use binary values to indicate a foot con-
tacts to the floor. We leverage the noise prediction
ˆ
ε instead of directly predicting latent joint angles ˆx
for joint angles because DDPM shows better perfor-
mance by predicting noise
ˆ
ε than latent intermediate
result ˆx (Ho et al., 2020). To optimize the three pre-
dictions, we formulate loss functions as:
L
noise
=
E
x
0
,t,s,c
||ε −
ˆ
ε||
2
2
, (4)
L
f oot
=
E
x
0
,t,s,c
||f −
ˆ
f ||
2
2
, (5)
L
root
=
E
x
0
,t,s,c
||r − ˆr||
2
2
. (6)
3.3.2 Global Guidance
Apart from separately providing guidance on different
aspects, we also propose to apply global guidance for
the conformity of all previous aspects. We propose to
apply physical regulations and a discriminator based
on a reconstruction formulation in DDPM to enhance
the generated motions to be realistic.
For our global guidance, we propose to utilize a
reconstruction formulation (Eq. 8), which is derived
from the arbitrary query property (Eq. 7) in DDPM.
The process of gradually adding Gaussian noise to the
input x
0
as described in the first line of Eq. 2 allows
the arbitrary query on intermediate state x
t
at any dif-
fusion step t, which is written as:
x
t
=
√
¯
σ
t
x
0
+
p
1 −
¯
σ
t
ε
t
. (7)
The arbitrary query property is denoted by the arrow
from x
0
to x
t
in Figure 5. Our neural network makes
Figure 5: Our proposed multi-task conditional DDPM
pipeline for styled motion synthesis.
predictions on the added noise ε
t
, which enables us
to estimate x
0
reversely. Therefore, based on the pre-
diction
ˆ
ε, the reconstruction estimation ˆx
0
is written
as:
ˆx
0
=
x
t
−
√
1 −
¯
σ
t
ˆ
ε
√
¯
σ
t
, (8)
which is denoted as the arrow from
ˆ
ε
t
to ˆx
0
in Figure
5. By the reconstruction formulation, we inversely
obtain an estimation of motions ˆx
0
at any diffusion
step t.
We propose to fulfil the physical regulations based
on the estimated motion ˆx. These physical regulations
enforce the physical properties in real world, encour-
aging natural and coherent motions to be generated
by our network. Specifically, the state of joints in two
Unifying Human Motion Synthesis and Style Transfer with Denoising Diffusion Probabilistic Models
69

consecutive frames is approximately the same as hu-
mans move consecutively in real world. Furthermore,
the velocity of joints between two consecutive frames
in realistic human motions does not change abruptly
in real world following the inertia constraint. Based
on the two observations, we propose to regulate the
velocity and acceleration in our estimated motion ˆx to
encourage natural and coherent results. We use the ro-
tation of joints, denoted as j
t
, to calculate the velocity
and acceleration. Therefore, we propose the follow-
ing two loss functions:
L
vel
=
E
t, j∈ˆx
||j
t
− j
t−1
||
2
2
, (9)
L
acc
=
E
t, j∈ˆx
||j
t
−2 j
t−1
+ j
t−2
||
2
2
. (10)
Apart from physical regulations, we also propose
an adversarial design to enhance the consonance be-
tween these tasks. We design a discriminator to pro-
vide the global harmony guidance. As we predict the
joint angles ˆx, global movements ˆr and supporting
foot patterns
ˆ
f separately in local guidance, the pro-
posed discriminator examines whether the three esti-
mated values are harmoniously combined into a nat-
ural motion clip. Following the adversarial training
paradigm, our discriminator is trained to distinguish
the generated motion clip and the ground truth mo-
tion clip. The adversarial loss is written as:
L
disc
= ||D(x
0
, r, f ) −1||
2
2
+||D( ˆx
0
, ˆr,
ˆ
f ) −0||
2
2
. (11)
Overall, our multi-task DDPM is optimized by a set
of respective loss functions on multiple tasks. The
overall loss is written as:
L =λ
1
L
noise
+ λ
2
L
f oot
+ λ
3
L
root
+ λ
4
L
disc
+ λ
5
L
vel
+ λ
6
L
acc
, (12)
where λ
1
= λ
2
= λ
3
= λ
4
= 1 and λ
5
= λ
6
= 0.01.
4 EXPERIMENTAL RESULTS
We train our method on a public motion dataset (Xia
et al., 2015) and evaluate the performance quantita-
tively and qualitatively. We compared our method
with the initial DDPM method (Ho et al., 2020) and
the existing DDPM-based method (Findlay et al.,
2022) for evaluating performance quantitatively. In
addition, we provide several generated motions for
qualitative evaluation on generating motions with dif-
ferent contents and styles. To validate the effective-
ness of each component in our proposed multi-task
architecture design, we conduct a comprehensive ab-
lation study.
4.1 Implementation Details
We trained all models on an NVIDIA RTX 3090 GPU
and used 32-bit floating-point arithmetic. The training
process can be completed within approximately one
day. The generation process for each instance takes
around 20 seconds. The hyperparameters in our ex-
periments are shown in Table 1.
Table 1: Hyperparameters.
Learning Rate 0.0002
Discriminator Learning Rate 0.0001
Adam β
1
0.9
Adam β
2
0.999
Adam ε 1e
−8
Batch Size 128
number of timesteps T 1000
EMA decay rate m 0.9999
We train our model with a publicly available
dataset proposed by (Xia et al., 2015). The dataset
contains six content classes and eight different styles
for each type of motion. This dataset offers a wide
range of styles and contents, allowing us to assess our
model’s diversity by combining different styles and
contents during motion generation. Additionally, we
apply a Gaussian filter and inverse kinematics as the
post-processing.
4.2 Quantitative Comparison
We choose to evaluate our models using the Fr
´
echet
inception distance (FID) (Heusel et al., 2017). This
metric compares the distribution of motions gener-
ated by our diffusion model with the distribution of
motions in our dataset. Given a set of generated mo-
tions from our model and a set of real motions from
our dataset, we calculate a multidimensional Gaus-
sian distribution from the features of a neural network
for these datasets, which are represented as N (µ
g
, Σ
g
)
for our generated data and N (µ
r
, Σ
r
) for our real data.
We use the penultimate features from our pre-trained
classifier for content motions. The FID metric is cal-
culated by:
FID = ||µ
r
−µ
g
||
2
2
+tr(Σ
g
+ Σ
r
−2(Σ
r
Σ
g
)
1
2
). (13)
We compare our method with an existing DDPM-
based method (Findlay et al., 2022), and the DDPM
baseline (Ho et al., 2020) on the dataset proposed by
(Xia et al., 2015). All three methods have been trained
using the same hyperparameter setting as shown in
Table 1. The FID score is computed by the same
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
70

Figure 6: Generated motions with different contents. (a) is
walking. (b) is running. (c) is jumping. (d) is kicking.
amount of generated data with the same pre-trained
classifier. The results have been reported in Table
2. As shown in Table 2, our method achieves the
Table 2: Quantitative comparison.
Model FID (↓)
(Findlay et al., 2022) 158.47
(Ho et al., 2020) 198.67
Ours 56.73
best FID score compared with previous studies. This
means the distribution of the generated data by our
method has less difference from the ground truth
dataset. In addition, we observe that the low perfor-
mance in (Ho et al., 2020) is mainly due to the lack
of constraints on motion-specific aspects. Although
(Findlay et al., 2022) adds the adversarial training,
it still does not perform well because it suffers from
low motion quality in non-walking motion caused by
its simple network design. Based on the observations
above, our method achieves the best generative result
with our proposed multi-task DDPM.
4.3 Qualitative Evaluations
Apart from the quantitative comparison, we also pro-
vide several qualitative evaluations. After training is
completed, we use the our model to generate motion
samples. The number of total frames is kept the same
as that of the training dataset, which is 32 frames for
each motion clip. Figure 6 has shown the generated
motions with different contents from our model. Our
results show that our method is capable of generating
different motions with different contents.
In Figure 7, we have shown several sampled in-
stances of styled walking motions. Our method pro-
duces different walking motions with styles, e.g. the
old walking motion in Figure 7. As our method is
based on stochastic generation, the capacity of our
model is adequate for modelling various styles. Ad-
ditionally, we also provide styled motions with other
contents, such as running, in Figure 8.
4.4 Ablation Study
We perform an ablation study to evaluate the effec-
tiveness of multi-task architecture design. We use the
same dataset proposed by (Xia et al., 2015) and keep
the same hyperparameter settings as shown in Table 1.
The FID score has been reported on the same amount
of generated data and the same classifier.
Table 3: Ablation study on multi-task architecture.
Model FID (↓)
w/o foot loss 74.68
w/o root loss 118.20
w/o physical loss 139.44
w/o discriminator 106.29
Ours - full 56.73
As shown in Table 3, our method achieves the best
FID score among different ablations. From the re-
sults of the ablation study, we validate the effective-
ness of our multi-task DDPM architecture. We ob-
serve a performance drop on the FID score by remov-
ing the discriminator. In our design, the discrimina-
tor harmonizes the separately estimated components
for local guidance. The adversarial loss encourages
to generate natural and coherent motions. If we re-
move the root prediction, the performance also drops
a lot. As previously discussed, the trajectory of move-
ments, which are represented by root, are mostly rep-
resented in the inter-class motion content. This re-
sult shows that human motions are heavily dependent
on the trajectory of movements. The physical loss,
including velocity and acceleration, provides another
important motion information, which is represented
by the intra-class styles. Within the same content, the
difference between the actions mainly happens in the
joint movement where velocity and acceleration can
describe the intra-class motion styles. Our method
without the foot loss still does not perform well. This
is because estimating supporting foot patterns helps
our neural network generate natural and coherent mo-
tions. Therefore, our ablation validates that each com-
ponent in our multi-task DDPM architecture is effec-
tive towards generating high-quality motions.
Unifying Human Motion Synthesis and Style Transfer with Denoising Diffusion Probabilistic Models
71
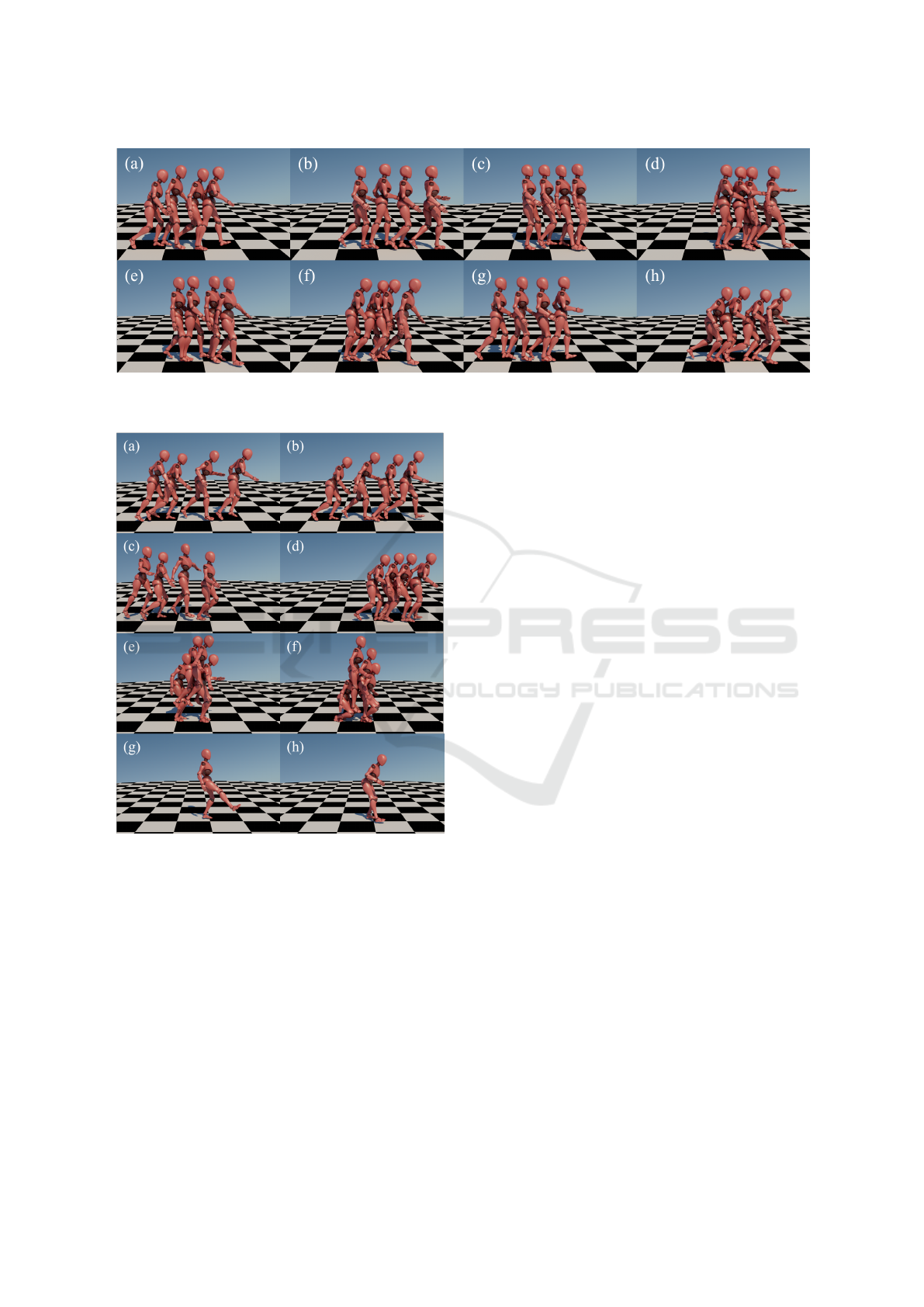
Figure 7: Walking motion with styles. (a) is angry walking. (b) is sexy walking. (c) is proud walking. (d) is strutting walking.
(e) is neutral walking. (f) is depressed walking. (g) is childlike walking. (h) is old walking.
Figure 8: We also provide generated styled motions with
other contents. (a) is angry running. (b) is depressed run-
ning. (c) is strutting running. (d) is old running. (e) is sexy
jumping. (f) is proud jumping. (g) is angry kicking. (h) is
old kicking.
5 CONCLUSION
Styled motion synthesis is a critical and challenging
problem with broad applications in many areas. We
propose an end-to-end framework for styled motion
synthesis where we successfully integrate two sepa-
rate tasks, i.e. human motion synthesis and motion
style transfer, into one pipeline. We represent our
motions as the inter-class content component and the
intra-class style component coupled in a common la-
tent space. Such integration brings benefits more in
optimal motion generation and thorough exploration
of the coupled content-style latent space than previ-
ously two-staged frameworks. As motions contain a
vast span of potential instances, we propose to lever-
age diffusion models in our framework to capture the
diversity of motion data. We take DDPM for our im-
plementation while our framework is generally com-
patible with other diffusion models. Our DDPM is
designed to be a multi-task architecture for styled mo-
tion synthesis. The multi-task system is optimized
by the local guidance including joint angles, trajec-
tory of movements, supporting foot patterns and the
global guidance including physical regulations and a
discriminator based on the reconstruction formulation
to encourage the generation of natural and coherent
motions. Both qualitative and quantitative experimen-
tal results have shown the superior performance of our
method. Our ablation study validates the effectiveness
of our proposed multi-task architecture.
Our proposed pipeline is generally compatible
with various diffusion-based generative models. In
addition, our pipeline has the potential to model other
motions (e.g., animal motions). However, as the mo-
tions become increasingly diverse, we may need new
generative models with higher learning capacity to
model the coupled content-style representations.
There are also a few potential future directions to-
wards the styled human motion synthesis with diffu-
sion models. One future work is that we will try our
pipeline with a larger set of solutions containing also
non-diffusion solutions and also try longer clip syn-
thesis.
A future direction could be the stability and con-
trollingness of the generation process via a stochastic
system. Although the capacity of models has been
greatly increased, the generation process is inherently
trained under heavy uncertainty brought by noise in-
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
72
jection. The stochastic property makes the gener-
ation difficult to achieve higher controllingness and
stability. The stochastic system such as DDPM re-
quires further mathematical theories on stochasticity
to achieve higher stability and better controllingness.
Figure 9: Punching is a challenging case.
Another potential direction in future is the control
of limb ends, e.g. feet and hands. Figure 9 shows
a challenging case. In human motions, the ends of
limbs usually have tiny but complicated movements
that DDPM is hard to model. Although we estimate
foot patterns and trajectory of movements, the control
of limb ends still has the potential to be improved by
several ways such as physics-based guidance.
REFERENCES
Aberman, K., Weng, Y., Lischinski, D., Cohen-Or, D., and
Chen, B. (2020). Unpaired motion style transfer from
video to animation. ACM Transactions on Graphics
(TOG), 39(4):64–1.
Ahn, H., Ha, T., Choi, Y., Yoo, H., and Oh, S. (2018).
Text2action: Generative adversarial synthesis from
language to action. In 2018 IEEE International Con-
ference on Robotics and Automation (ICRA), pages
5915–5920. IEEE.
Bond-Taylor, S., Leach, A., Long, Y., and Willcocks, C. G.
(2021). Deep generative modelling: A compara-
tive review of vaes, gans, normalizing flows, energy-
based and autoregressive models. arXiv preprint
arXiv:2103.04922.
Dhariwal, P. and Nichol, A. (2021). Diffusion models beat
gans on image synthesis. Advances in Neural Infor-
mation Processing Systems, 34:8780–8794.
Dong, Y., Aristidou, A., Shamir, A., Mahler, M., and Jain,
E. (2020). Adult2child: Motion style transfer using
cyclegans. In Motion, interaction and games, pages
1–11.
Findlay, E. J., Zhang, H., Chang, Z., and Shum, H. P.
(2022). Denoising diffusion probabilistic mod-
els for styled walking synthesis. arXiv preprint
arXiv:2209.14828.
Henter, G. E., Alexanderson, S., and Beskow, J. (2020).
Moglow: Probabilistic and controllable motion syn-
thesis using normalising flows. ACM Transactions on
Graphics (TOG), 39(6):1–14.
Heusel, M., Ramsauer, H., Unterthiner, T., Nessler, B., and
Hochreiter, S. (2017). Gans trained by a two time-
scale update rule converge to a local nash equilibrium.
Advances in neural information processing systems,
30.
Ho, J., Jain, A., and Abbeel, P. (2020). Denoising diffusion
probabilistic models. Advances in Neural Information
Processing Systems, 33:6840–6851.
Holden, D., Komura, T., and Saito, J. (2017). Phase-
functioned neural networks for character control.
ACM Transactions on Graphics (TOG), 36(4):1–13.
Kawar, B., Elad, M., Ermon, S., and Song, J. (2022). De-
noising diffusion restoration models. arXiv preprint
arXiv:2201.11793.
Ling, H. Y., Zinno, F., Cheng, G., and Van De Panne, M.
(2020). Character controllers using motion vaes. ACM
Transactions on Graphics (TOG), 39(4):40–1.
Martinez, J., Black, M. J., and Romero, J. (2017). On
human motion prediction using recurrent neural net-
works. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 2891–
2900.
Mourot, L., Hoyet, L., Le Clerc, F., Schnitzler, F., and Hel-
lier, P. (2022). A survey on deep learning for skeleton-
based human animation. In Computer Graphics Fo-
rum, volume 41, pages 122–157. Wiley Online Li-
brary.
Nichol, A., Dhariwal, P., Ramesh, A., Shyam, P., Mishkin,
P., McGrew, B., Sutskever, I., and Chen, M. (2021).
Glide: Towards photorealistic image generation and
editing with text-guided diffusion models. arXiv
preprint arXiv:2112.10741.
Nichol, A. Q. and Dhariwal, P. (2021). Improved denois-
ing diffusion probabilistic models. In International
Conference on Machine Learning, pages 8162–8171.
PMLR.
Petrovich, M., Black, M. J., and Varol, G. (2021). Action-
conditioned 3d human motion synthesis with trans-
former vae. In Proceedings of the IEEE/CVF Interna-
tional Conference on Computer Vision, pages 10985–
10995.
Ramesh, A., Dhariwal, P., Nichol, A., Chu, C., and
Chen, M. (2022). Hierarchical text-conditional im-
age generation with clip latents. arXiv preprint
arXiv:2204.06125.
Saharia, C., Chan, W., Saxena, S., Li, L., Whang, J., Den-
ton, E., Ghasemipour, S. K. S., Ayan, B. K., Mahdavi,
S. S., Lopes, R. G., et al. (2022). Photorealistic text-
to-image diffusion models with deep language under-
standing. arXiv preprint arXiv:2205.11487.
Sohl-Dickstein, J., Weiss, E., Maheswaranathan, N., and
Ganguli, S. (2015). Deep unsupervised learning us-
ing nonequilibrium thermodynamics. In International
Conference on Machine Learning, pages 2256–2265.
PMLR.
Song, J., Meng, C., and Ermon, S. (2020). De-
noising diffusion implicit models. arXiv preprint
arXiv:2010.02502.
Vahdat, A., Kreis, K., and Kautz, J. (2021). Score-based
generative modeling in latent space. Advances in
Unifying Human Motion Synthesis and Style Transfer with Denoising Diffusion Probabilistic Models
73

Neural Information Processing Systems, 34:11287–
11302.
Xia, S., Wang, C., Chai, J., and Hodgins, J. (2015). Re-
altime style transfer for unlabeled heterogeneous hu-
man motion. ACM Transactions on Graphics (TOG),
34(4):1–10.
Xiao, Z., Kreis, K., and Vahdat, A. (2021). Tackling the
generative learning trilemma with denoising diffusion
gans. arXiv preprint arXiv:2112.07804.
Ye, Z., Wu, H., and Jia, J. (2021). Human motion modeling
with deep learning: A survey. AI Open.
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
74
