
Object Detection in Floor Plans for Automated VR Environment
Generation
Timoth
´
ee Fr
´
eville, Charles Hamesse, B
ˆ
enoit Pairet and Rob Haelterman
Royal Military Academy, Rue Hobbema 8, Brussels, Belgium
Keywords:
Image Recognition, Floor Plans, Neural Networks, Synthetic Data.
Abstract:
The development of visually compelling Virtual Reality (VR) environments for serious games is a complex
task. Most environments are designed using game engines such as Unity or Unreal Engine and require hours
if not days of work. However, most important information of indoor environments can be represented by floor
plans. Those have been used in architecture for centuries as a fast and reliable way of depicting building
configurations. Therefore, the idea of easing the creation of VR ready environments using floor plans is of
great interest. In this paper we propose an automated framework to detect and classify objects in floor plans
using a neural network trained with a custom floor plan dataset generator. We evaluate our system on three
floor plans datasets: ROBIN (labelled), PFG (our own Procedural Floor plan Generation method) and 100
labelled samples from the CubiCasa Dataset
1 INTRODUCTION
Designing high-quality VR environments is a noto-
riously tedious but important task for the succesful
deployment of VR applications. Depending on the
target application, different levels of attention must
be brought to different aspects of the environment.
Aiming for maximum photorealism is not always the
best option, for example in the case of serious gaming
or procedure training applications where the place,
scale, behaviour and lifecycle of objects are the most
important. For example, in the case of firefight-
ing training, rooms must feature doors, windows and
flammable props at relevant locations chosen by the
instructor (Haelterman et al., 2020).
Floor plans are an easily understandable and ed-
itable format. This representation also has the advan-
tage to be universal. Furthermore, with the democra-
tization of the use of software to design these plans,
architects and individuals are now able to create and
modify floor plans in a few minutes. Adding a VR
ready experience to this system is a natural prolonga-
tion of the technology. Furthermore, displaying inte-
rior layout using a VR headset can have much more
impact than a regular computer screen (Portman et al.,
2015) and (Davila Delgado et al., 2020).
In this work, we extend the framework proposed
in (Fr
´
eville et al., 2021). More specifically, we
present enhancements done on the object detection
component of the framework. In this case, the most
important aspect is the presence and placement of ob-
jects that will influence the progression of tactical
squad: doors, windows, room and building layouts.
Our contributions are the following:
• A floor plan dataset generator with various image
deterioration methods (noise, distortion, etc) and
ideal ground truth, to train a neural network with
robustness;
• A neural network trained on this dataset for a
more versatile detection and a thorough evalua-
tion on real-life floor plans;
• The integration of our method in a more generic
framework for converting floor plans into VR en-
vironments.
2 RELATED WORK
We review the state-of-the-art methods in floor plan
parsing, 3D environment generation for VR and com-
plete systems to generate VR environments from floor
plans.
2.1 Floor Plan Parsing
2.1.1 Classical Approaches
Traditional floor plan parsing techniques use con-
ventional image processing techniques to target ele-
480
Fréville, T., Hamesse, C., Pairet, B. and Haelterman, R.
Object Detection in Floor Plans for Automated VR Environment Generation.
DOI: 10.5220/0011629300003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
480-486
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

ments that could point to the presence of walls, doors,
or other such things. (Mac
´
e et al., 2010) performs
line detection using image vectorization and a Hough
transform. If a particular graphical arrangement is
met, the lines are merged to form walls. The authors
suggest a similar technique to extract arcs and find
door hypotheses. (de las Heras et al., 2011) proposes
an alternative approach that does not require image
vectorization and employs patch-based segmentation
with visual words. The method in (Ahmed et al.,
2011) is built to distinguish between thick, medium,
and thin lines in order to identify walls and eliminate
any components that are outside the convex hull of
the outer walls. In (Daniel Westberg, 2019), a thick
and a thin representation of the walls are extracted us-
ing noise removal techniques, erosions, and dilations.
Then, a hollow representation of walls with a constant
thickness is created by subtracting the thin represen-
tation from the thick one, which may then be used as
a reference for 3D modeling.
2.1.2 Deep Learning-Based Methods
To learn to predict room-boundary elements (e.g.
walls, windows, and doors) (Zeng et al., 2019) de-
scribes a multi-task neural network. In order to extract
features from the floor plan image, a shared encoder
is used, and one decoder is used for each task. Both
the encoder and the decoders’ architectures are based
on VGG (Simonyan and Zisserman, 2015). A Faster-
RCNN-based (Ren et al., 2015) object detector is en-
hanced in (Ziran and Marinai, 2018) to learn to antic-
ipate annotations in diverse floor plan datasets. The
same strategy is suggested in(Singh, 2019), however
this time it uses of a modified version of the YOLO
object detector (Redmon and Farhadi, 2017). Train-
ing or evaluation of these neural networks is done on
the datasets (Mathieu Delalandre, 2019) and (Chiran-
joy Chattopadhyay , 2019), which we also use in this
study.
2.2 3D Environment Generation
The game industry has been a major driver of ad-
vancement in the field of 3D environment generation
during the past few years. 3D engines like Unity
(Haas, 2014) and Unreal Engine (Epic Games, 2019a)
are becoming easier to use, more adaptable, and more
potent. Environments can be created using 3D props
that have been manually or programmatically created
(and, if necessary, animated). The market has a huge
selection of 3D models, which facilitates the creation
of new surroundings. Blender (Foundation, 2002) is
also a good choice. It is open-source and has an active
community and plugins to execute tasks programmat-
ically from Python scripts. Since Blender does not
have as many interaction features or VR capabilities
like game engines, we opt to develop our algorithm
with game engines. More particularly we choose Un-
real Engine 4 because of its Virtual Reality integration
plugin that works perfectly with Steam VR (Valve,
2003), ensuring the versatility of our model on var-
ious VR platforms such as Oculus (Meta, 2012) or
Varjo (Varjo, 2016). Furthermore, the access to the
Unreal Market (Epic Games, 2019b) is an important
feature that allows us to ease the process of our im-
plementation by getting plugins and assets from the
community.
2.3 Floor Plan to VR Environment
Frameworks
There exists many frameworks that achieve the tasks
of floor plan parsing and 3D environment genera-
tion. 3DPlanNet uses heuristic rules to retrieves walls
and Tensorflow Object detection API for windows
and doors (Park and Kim, 2021). This study (Dodge
et al., 2017) uses a fully connected neural network
and uses OCR (Optical Character Recognition) to es-
timate the size of the rooms. The framework proposed
in (Fr
´
eville et al., 2021) combines traditional com-
puter vision and deep-learning techniques to detect
room boundary features (walls, doors and windows,
interior objects). They implement ad-hoc map gener-
ation scripts for Unreal Engine to turn floor plans into
VR-ready environments. In our case, we use a neural
network-based solution for object detection using a
Yolo instance (Redmon and Farhadi, ). To ensure suf-
ficient training data, we design a floor plan generator
with random image perturbations. Doing so allows us
to feed YoloV5 with virtually unlimited training data,
allowing our implementation to be more robust.
3 METHOD
In this section, we present our floor plan parser and
our custom dataset generator. The architecture of the
parser system, depicted in Figure 3 has two main two
parts :
1. The furniture recognition : which uses the
YOLOv5 Framework (Deep Learning methods)
2. The wall recognition that uses OpenCV libraries
(Traditional image processing tool)
Object Detection in Floor Plans for Automated VR Environment Generation
481
3.1 Walls Detection
Our method is based on (Daniel Westberg, 2019),
which mainly uses traditional computer vision meth-
ods and is implemented using OpenCV. The steps of
the procedure to go from a grayscale floor plan image
to a list of wall coordinates are the following:
1. Conversion to a binary image using binary inverse
thresholding.
2. Noise removal method with opening (erosion then
dilation) to remove the thin details (e.g. furniture).
At this point, we have an image representing a
thick version of the walls.
3. Distance transform: Each pixel that is a part of a
wall has its value changed to reflect the separation
between it and the closest black pixel, or the wall’s
edge.
4. This distance image is converted to a binary image
once again using binary thresholding. As a result,
the walls appear narrow in the resulting image.
5. A representation of hollow walls with a constant
thickness is produced by subtracting thin walls
(Step 4) from thick walls (Step 2) in the process.
3.2 Object Detection
The most recent edition of YOLO is the v5 (Red-
mon and Farhadi, ). The backbone is composed of a
Cross-stage partial networks CSP (Wang et al., 2019)
are employed in YOLOv5 to extract valuable fea-
tures. For feature pyramid retrieval, YOLOv5 lever-
ages PANet (Liu et al., 2018). Then, YOLOv5 uses
the sigmoid activation function in the final detection
layer and the leaky ReLU activation function in the
middle/hidden layers. For naturally occurring photos,
YoloV5 is one of the most rapid and precise object
detection method.
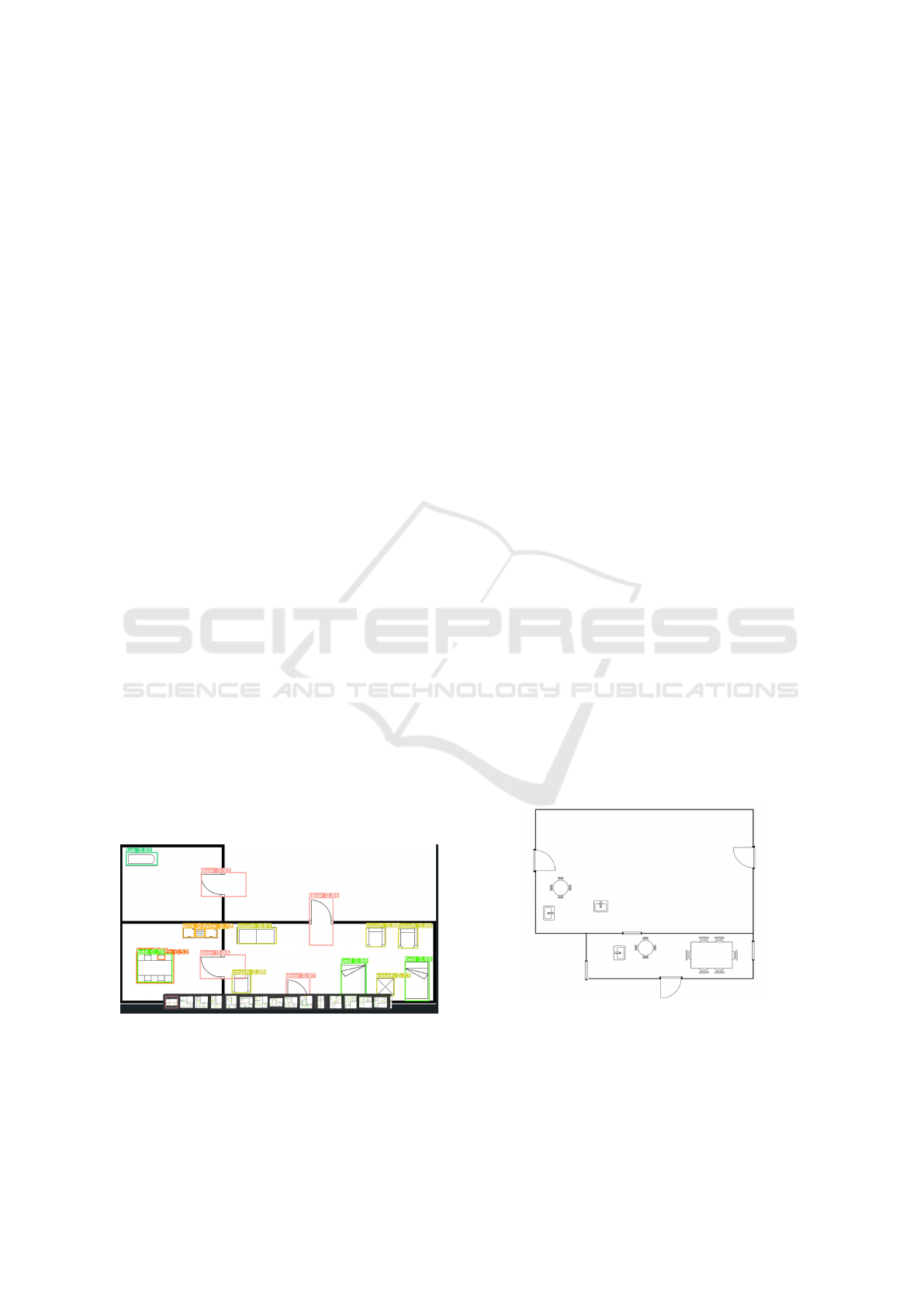
Figure 1: YoloV5 on inference.
YoloV5 has shown its effectiveness to recognize
2D features on hand-drawn images (Reddy and Pan-
icker, 2021). Therefore this neural network frame-
work has been chosen for the furniture recognition
part. The training was done using a multi-GPU setup
using GTX Tesla cards, a batch size of 16, learning
rate of 0.001, a momentum of 0.937 and 500 epochs.
Using YOLOv5 allows us to benefit from the exten-
sive inference and test metrics implemented by de-
fault in the framework.
3.3 3D Environment Generation
The 3D generation is achieved using Unreal Engine 4.
Therefore we used a plugin found on the marketplace
to import the meshes in runtime (Virtual Bird, 2018).
Furthermore we create our own plugin to transform
YOLOv5 text file output into readable object by Un-
real Engine.
3.4 Training Data Generator
To train a deep neural network we need numerous
labeled images. Nowadays many datasets are avail-
able online for common object detection (e.g: air-
planes, cars, boat, animals, etc) on various websites
such as Kaggle, Robotflow or Github. This consid-
erably eases the neural network learning process as
the quality of the neural network highly depends on
the data feed. Unfortunately, specific object detection
requires specific datasets. Therefore, a vast quantity
of labeled floor plans are required for our application.
This leads to two issues. First, this sort of dataset is
relatively hard to find. Second, floor plan data found
in one source are most likely to use the same sym-
bols for furniture which increases the probability of
over-fitting and does not help our model to be robust
during inference. Our solution was to program a floor
plan generator that can create thousands of labelled
data using different layouts.
Figure 2: Example of floor plan generated.
Creating an accurate and realistic floor plan im-
age by using a generator can quickly become a tedious
task if we do not restrain the scope on the most impor-
tant aspect: interior object recognition. The aim here
is to merge the window and door recognition with the
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
482

furniture recognition. Therefore, creating an image
with a convincing room configurations and usable fur-
niture arrangement does not enter into our considera-
tion. The neural network only needs to learn object
shapes and basic placement rules (e.g. doors and win-
dows are mostly linked with walls). Using the known
rules and random functions we can develop a program
to generate thousands of labeled floor plans with dif-
ferent floor layouts and symbols.
3.5 Complete System
Figure 3 represent the final architecture of our
method. Using multiple python scripts in parallel and
Docker we can easily generate a 3D representation of
the world using Unreal Engine 4 as our main virtual
engine.
Figure 3: Final Architecture.
4 EVALUATION
The military end-users would have different level of
detail of floorplans in their possession.
• Some of them would be accessible directly from
the architect plan achieved using a software.
Which means almost zeros noise and high reso-
lution plans. We are testing this using a synthetic
dataset named ROBIN.
• The second option would be old plans scanned,
which obviously features more noise and defaults
induced by the age of the paper itself or the draw-
ing done by the architect. We would be testing
it using Cubicasa datasets which feature scans of
real-world floor plans.
• The final option would be to draw by hand directly
on paper the floorplan if no other option is avail-
able. This features becomes quite interesting, al-
lowing the end-user to draw virtually hundred of
plans for tactical training. For this we will test on
drawn floor plan made by our self.
We evaluate the performance of our methods on a
machine with an Intel i7 8-core CPU and an Nvidia
RTX 2080Ti GPU. The computational time required
to carry out our method is extremely brief: only a few
seconds are needed to run the detection procedure,
which includes the neural network inference. The
use of Docker allows us to use pre-configured
environments with libraries and tools to run codes.
Using this technique we greatly enhance the number
of VR environments generated. The YOLO instance
is launched to detect every image present on a folder.
Since the implementation is splitting the generation
of walls and the furniture detection, it is much more
efficient and reliable to only evaluate our model on
the furniture part. Firstly, it is a tedious task to find a
floor plan dataset that has walls labelled. Therefore
the inference on furniture would be our only metrics.
Our model only involves the position and the size of
the objects found, not rotation. However, in our use
case the rotation can be easily guessed as objects such
as sinks, couches or toilets are in most apartments
turned towards the center of the room. Furthermore,
objects as tables or plants do not need rotation
information to be accurate. The evaluation part has
been split in two parts: first our detection system is
evaluated with the ROBIN synthetic dataset. In a
second time it will be evaluated with a real-world
dataset. Those datasets will be scans of buildings
available from real estate companies. Three different
metrics have been used for the evaluation part:
mAP: Mean Average Precision : The mAP cal-
culates a score by comparing the detected box to the
ground-truth bounding box. The model’s detections
are more precise the higher the score.
Precision: Precision is a model’s capacity to recog-
nize only the pertinent objects. A model with a preci-
sion of 1.0 produces no false positives. However, even
if there are bounding boxes that should be identified
but aren’t, the value will still be 1.0.
Precision = T P/(T P + FP) (1)
Recall: Recall is a model’s capacity to locate every
ground truth bounding box. A model with a recall of
1.0 creates no false negatives, or undetected bounding
boxes that should be identified. The recall will still be
1.0, even if there is a ”overdetection” and the incorrect
bounding box is discovered.
Recall = T P/(T P + FN) (2)
4.1 Synthetic Data (ROBIN)
Many research papers use the ROBIN dataset to
validate their framework: (Sharma et al., 2018) uses
Object Detection in Floor Plans for Automated VR Environment Generation
483
it to test the performance of their neural network
to match floorplans with hand-drawn sketch plans.
(Goyal et al., 2019) uses the dataset to generate more
floor plans. Better results are expected with this type
of data since it is noise- and distortion-free. The la-
belling of this dataset has been done using Robotflow
and can be accessed in (Timoth
´
ee Fr
´
eville, 2022) for
further investigation. Therefore, it is a perfect case to
test our algorithms on a synthetic dataset that was not
in the training set. If the inference test is satisfactory
we could switch to a real world dataset.
Table 1: Results on ROBIN datasets.
Object mAP Precision Recall
Doors 0.774 0.713 0.771
Table 0.361 0.695 0.082
Sink 0.254 0.546 0.327
Couch 0.496 0.643 0.259
Bed 0.280 0.317 0.699
Toilet 0.738 0.684 0.759
Tub 0.743 0.650 0.836
All 0.536 0.606 0.533
Figure 4: Sample of the ROBIN dataset.
The ROBIN dataset does not feature window ob-
jects. As we can see the model confuses objects. This
can be explained by the symbol system used by the
ROBIN dataset that differs significantly from the ones
present in the dataset generated to train YOLOv5 (e.g.
tables are represented by a square with a cross which,
model has never been trained with such representa-
tion). Furthermore, sinks and beds differ a lot com-
pared to the training dataset used Fig5. However, the
model detects almost every object on plans but the
recognition can definitely be enhanced.
Figure 5: Objects that are hardly recognized by our frame-
work.
4.2 Real-World Data (CubiCasa)
The CubiCasa dataset does not feature objects of
couch, bed and toilet classes. In particular, the
CubiCasa5K version is a large-scale floor plan image
collection with 5000 samples with objects that have
been classified into more than 80 categories. By
employing polygons to divide the various objects, the
dataset annotations are more precise than the usual
ones using bounding boxes. This dataset suits our
need of diverse symbols and floor plan layouts in
general. Most of the images feature distortion and
noise as most of the images are pictures or scans
taken from the real plans.
Table 2: Results on CubiCasa datasets.
Object mAP Precision Recall
Window 0.353 0.585 0.162
Doors 0.461 0.514 0.408
Sink 0.107 0.285 0.027
Toilet 0.074 0.153 0.016
Tub 0.016 0.047 0.021
All 0.202 0.316 0.126
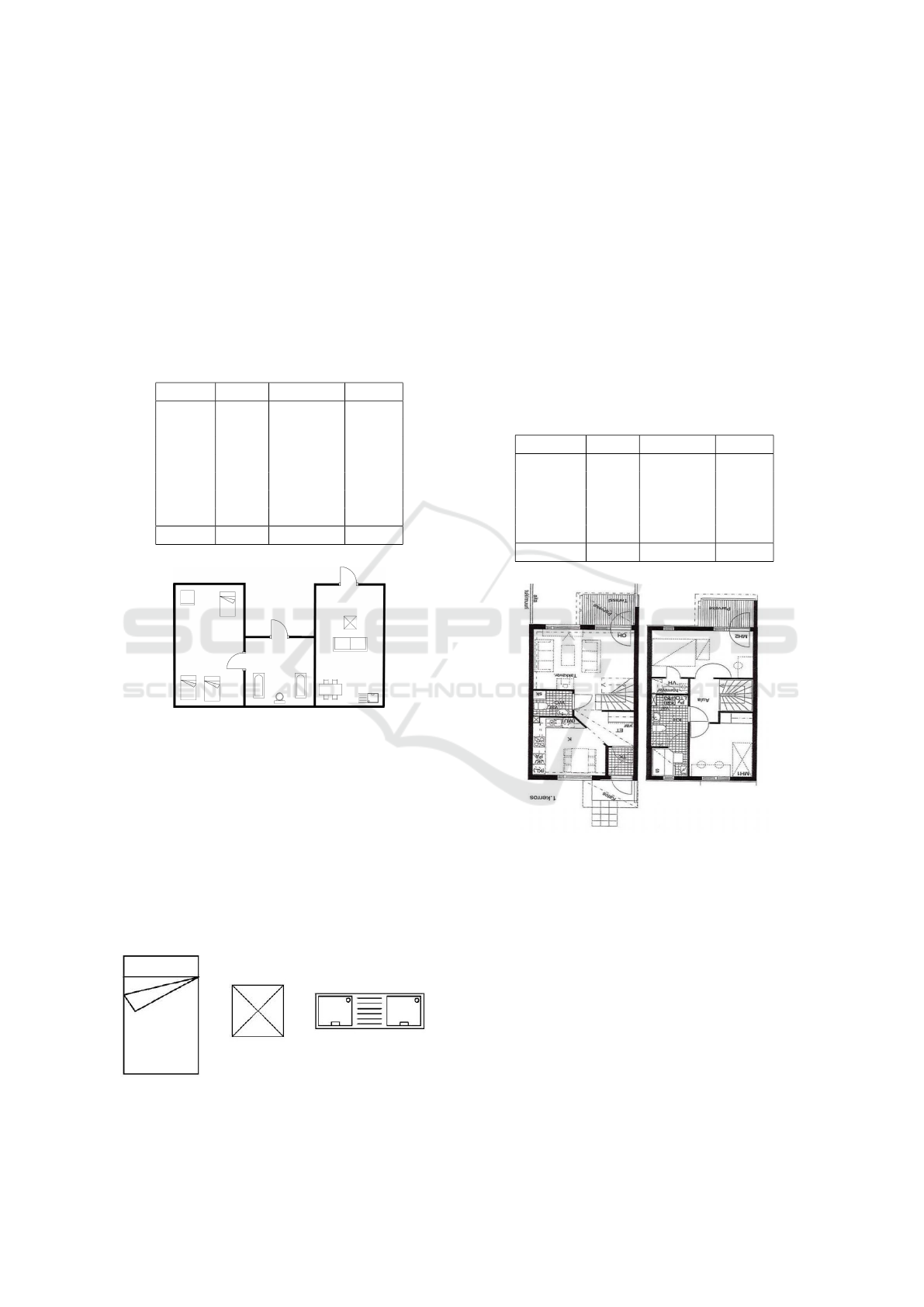
Figure 6: Sample of the Cubicasa dataset.
As expected, the model gets more frequently lost
against a real-world dataset. Most of the objects are
confused with the background. The real-world dataset
features pen-drawing, distortion, colors for certain
plan and an overlapping of symbol that confuses the
recognition.
4.3 Hand-Drawn Dataset
This hand-drawn dataset has been created specially
for this study. This is a feature specially interesting
for the military forces, as they can use it draw the floor
worthy of interest and quickly train for intervention.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
484
This dataset is composed of seven plans that fea-
ture objects that resemble the ones used by the floor
plan generator. Five of them are archived using a ruler
for a better precision and two with free-hand drawing
to challenge the neural network.
Table 3: Results on hand drawing datasets
Object mAP Precision Recall
Window 0 0 0
Doors 0.840 0.913 0.778
table 0.900 1 0.800
Sink 0.687 1 0.375
couch 0.812 1 0.625
bed 0.750 1 0.500
Toilet 0.642 0.750 0.429
Tub 0.723 0.600 0.750
All 0.669 0.782 0.532
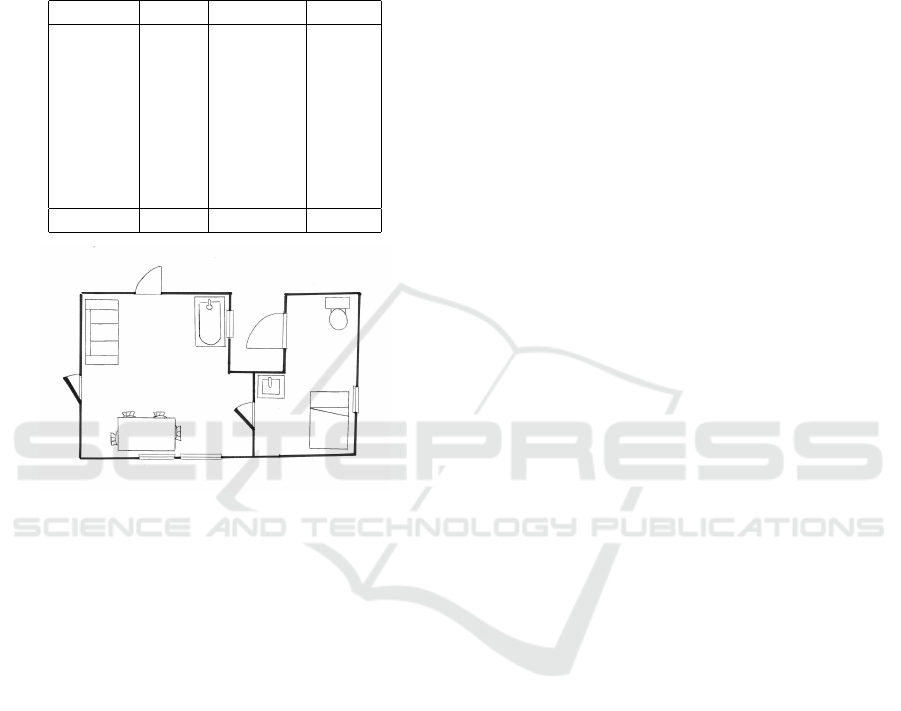
Figure 7: Sample of the Hand-drawn dataset.
Our method yields good results on the hand-drawn
dataset. This indicates that the patterns learnt by the
neural network during the training is robust enough to
understand a hand-drawn version of a floor plan. This
results are really interesting to validate our model in
a near future. However, a dataset of seven plans is
not enough to draw conclusion on the validity of our
model on other hand-drawn floor plans.
5 CONCLUSION
In this paper we demonstrated an automated frame-
work to detect and classify objects in floor plans us-
ing a neural network trained with a custom floor plan
dataset generator. Our custom floor plan dataset gen-
erator allows our neural network to be useful on dif-
ferent plan representations. As presented in the sec-
tion 4.1 and 4.2 the model performs better on syn-
thetic dataset than the real world dataset. The noise
and blur induced on realistic floorplan confuses the
YOLOv5 instance that has only been fed with syn-
thetic procedural data. A more robust model can
be build using a more versatile layout and symbol-
ism on floorplan to generate and including real world
datasets in the training process. More variation of the
same images with blur and distortion can be added to
achieve better results as well.
REFERENCES
Ahmed, S., Liwicki, M., Weber, M., and Dengel, A. (2011).
Improved automatic analysis of architectural floor
plans. In 2011 International Conference on Document
Analysis and Recognition, pages 864–869.
Chiranjoy Chattopadhyay (2019). Repository of building
plans (robin).
Daniel Westberg (2019). Floor plans to blender 3d. https:
//github.com/grebtsew/FloorplanToBlender3d/.
Davila Delgado, J. M., Oyedele, L., Demian, P., and Beach,
T. (2020). A research agenda for augmented and vir-
tual reality in architecture, engineering and construc-
tion. Advanced Engineering Informatics, 45:101122.
de las Heras, L.-P., Mas, J., S
´
anchez, G., and Valveny, E.
(2011). Wall patch-based segmentation in architec-
tural floorplans. In 2011 International Conference
on Document Analysis and Recognition, pages 1270–
1274.
Dodge, S., Xu, J., and Stenger, B. (2017). Parsing floor
plan images. In 2017 Fifteenth IAPR International
Conference on Machine Vision Applications (MVA),
pages 358–361.
Epic Games (2019a). Unreal engine. https://www.
unrealengine.com.
Epic Games (2019b). Unreal market.
Foundation, T. B. (2002). Blender. https://www.blender.
org/.
Fr
´
eville, T., Hamesse, C., Pairet, B., Lahouli, R., and Hael-
terman, R. (2021). From floor plans to virtual reality.
In 2021 IEEE International Conference on Artificial
Intelligence and Virtual Reality (AIVR), pages 129–
133.
Goyal, S., Mistry, V., Chattopadhyay, C., and Bhatnagar, G.
(2019). Bridge: Building plan repository for image
description generation, and evaluation.
Haas, J. K. (2014). A history of the unity game engine.
Worcester Polytechnic Institute.
Haelterman, R., Bellemans, M., Lammens, D., Sloover, J.,
De Vleeschauwer, T., Schoofs, E., Jordens, W., Steen-
huyse, B., Mangelschots, J., Selleri, S., Hamesse, C.,
and Fr
´
eville, T. (2020). Training firefighters in virtual
reality.
Liu, S., Qi, L., Qin, H., Shi, J., and Jia, J. (2018). Path ag-
gregation network for instance segmentation. CoRR,
abs/1803.01534.
Mac
´
e, S., Locteau, H., Valveny, E., and Tabbone, S. (2010).
A system to detect rooms in architectural floor plan
images. pages 167–174.
Mathieu Delalandre (2019). Systems evaluation synthetic
documents (sesyd). http://mathieu.delalandre.free.fr/
projects/sesyd/.
Object Detection in Floor Plans for Automated VR Environment Generation
485

Meta (2012). oculus. https://www.oculus.com/rift-s/
?locale=fr FR.
Park, S. and Kim, H. (2021). 3dplannet: Generating 3d
models from 2d floor plan images using ensemble
methods. Electronics, 10:2729.
Portman, M., Natapov, A., and Fisher-Gewirtzman, D.
(2015). To go where no man has gone before: Virtual
reality in architecture, landscape architecture and en-
vironmental planning. Computers, Environment and
Urban Systems, 54:376–384.
Reddy, R. R. and Panicker, M. R. (2021). Hand-drawn elec-
trical circuit recognition using object detection and
node recognition. CoRR, abs/2106.11559.
Redmon, J. and Farhadi, A. Yolov3: An incremental im-
provement.
Redmon, J. and Farhadi, A. (2017). Yolo9000: Better,
faster, stronger. pages 6517–6525.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Proceedings of the 28th Inter-
national Conference on Neural Information Process-
ing Systems - Volume 1, NIPS’15, page 91–99, Cam-
bridge, MA, USA. MIT Press.
Sharma, D., Gupta, N., Chattopadhyay, C., and Mehta, S.
(2018). Rexplore: A sketch based interactive explorer
for real estates using building floor plan images. In
2018 IEEE International Symposium on Multimedia
(ISM), pages 61–64.
Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recognition.
In International Conference on Learning Representa-
tions.
Singh, D. (2019). Object detection in floor plan images.
Timoth
´
ee Fr
´
eville (2022). Datasets for evaluation.
https://github.com/Tim-HW/Object-detection-
in-floor-plans-for-automated-VR-environment-
generation-datasets.
Valve (2003). Steam vr. https://store.steampowered.com/
app/250820/SteamVR/.
Varjo (2016). Varjo. https://varjo.com/.
Virtual Bird (2018). Import runtime ue4. https://www.
virtualbird.de/ue4Doku/RealTimeImport/.
Wang, C., Liao, H. M., Yeh, I., Wu, Y., Chen, P., and Hsieh,
J. (2019). Cspnet: A new backbone that can enhance
learning capability of CNN. CoRR, abs/1911.11929.
Zeng, Z., Li, X., Yu, Y., and Fu, C. (2019). Deep floor plan
recognition using a multi-task network with room-
boundary-guided attention. In 2019 IEEE/CVF In-
ternational Conference on Computer Vision (ICCV),
pages 9095–9103, Los Alamitos, CA, USA. IEEE
Computer Society.
Ziran, Z. and Marinai, S. (2018). Object detection in floor
plan images. In Pancioni, L., Schwenker, F., and
Trentin, E., editors, Artificial Neural Networks in Pat-
tern Recognition. Springer International Publishing.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
486
