
Dynamic Task Graphs for Teams in Collaborative Assembly Processes
Ana Macedo
a
, Liliana Ant
˜
ao
b
, Jo
˜
ao Reis
c
and Gil Gonc¸alves
d
Faculty of Engineering, University of Porto, Rua Dr. Roberto Frias, 4200-465 Porto, Portugal
Keywords:
Collaborative Robotics, Task Allocation and Scheduling, Task Graph, Reinforcement Learning.
Abstract:
Collaborative robots are increasingly used in assembly processes, particularly in teams (Human-Robot or
Robot-Robot), expanding the complexity and possible alternative sequences of operation and ways of team
allocation to complete the assembling of a product. With this complexity, representing the possible sequences
of actions needed to complete the task and the necessary constraints in a graph would improve the flexibility
provided by team collaboration. However, the best sequence must be selected to increase productivity and
profit, which is still challenging for a robot. This work proposes a modular system composed of three different
components that, in a closed-loop interaction, allows a robotic agent to correctly plan a task given a set of
operations, and optimize the task sequence allocation and scheduling plan. The effectiveness of the system
is evaluated within an assembly process of different types of furniture for task sequence and allocation. The
agent was able to converge successfully in three assembly scenarios: a table with 1 leg, a table with 2 legs and
a table with 4 legs. Moreover, in the task allocation tests, the robotic agent was able to select actions according
to the human operator expertise and its impact in the task completion time.
1 INTRODUCTION
With Industry 4.0, intelligent manufacturing and in-
dustrial robots emerged, which successfully perform
repetitive tasks with high precision, boosting effi-
cacy and productivity. However, it is challenging for
a robot with limited cognitive abilities to complete
complex tasks independently and meet high prod-
uct variety and mass customization demands (Zhang
et al., 2022). On the other hand, it is also impractical
for humans to perform a task in a way that robots en-
code task models (Mangin et al., 2022). Thus, new
needs emerge with the increasing necessity of col-
laboration between humans and robots. The produc-
tion engineering society is giving considerable atten-
tion to collaborative systems, particularly in assem-
bly processes, since they expand the possible alter-
native sequences of operations to perform and ways
of team allocation to complete the assembling of a
product, taking advantage of the fact that the tasks
can be divided into more specific and discrete oper-
ations. Given this, creating a graph that represents the
possible sequences of operations necessary to com-
a
https://orcid.org/0000-0003-4479-006X
b
https://orcid.org/0000-0002-2903-0989
c
https://orcid.org/0000-0002-1986-8366
d
https://orcid.org/0000-0001-7757-7308
plete a task along with its constraints would provide
more flexibility to team collaboration. In such a rep-
resentation, any team member could easily observe
the flow of actions it or its partner must execute, be-
ing able to formulate a complete sequence of steps to
correctly perform a given task. However, the best se-
quence of operations planned for a specific product
and partner must be selected, and robots do not have
the human capacity to plan the best way of complet-
ing a task with a partner. The main motivation of this
work is to contribute with modular and simple solu-
tion in the field of team collaboration in assembly pro-
cesses. This approach focuses on adapting an agent’s
decisions automatically and intelligently, by choosing
the sequence of operations to be performed within a
given task.
Given the problem and the motivation, the main
objectives of this work are to: (1) to create a modular,
scalable system that includes the task representation
in a graph, Machine Learning methods for learning
and the task simulation, (2) build a graph that rep-
resents the sufficient and necessary information for
the agent to efficiently learn, (3) use Machine Learn-
ing methods to teach an agent to correctly choose the
task sequence in an assembly processes, (4) visual-
ize and update the task status in the graph during the
simulation, so that the operator can easily visualize
Macedo, A., Antão, L., Reis, J. and Gonçalves, G.
Dynamic Task Graphs for Teams in Collaborative Assembly Processes.
DOI: 10.5220/0011628500003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 17-25
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
17

the whole assembly process and be guided to per-
form corresponding tasks, and (5) compare the solu-
tion’s performance between different algorithms, re-
wards and parameters.
We can divide this paper into four main parts. The
first, including Sections 2 and 3, introduces the reader
to the domain of this work through a review and anal-
ysis of related and available concepts. The second
part, Sections 4 and 5, presents the modular frame-
work and defines a case scenario. Section 6, the third
part, develops the system and defines the procedures.
Finally, Section 7 presents the experiments and the
effectiveness of the proposed method is analysed, and
Section 8 corresponds to the final conclusions.
2 BACKGROUND
This chapter presents an overview of the main con-
cepts related to this work’s scope, including Rein-
forcement Learning (RL) and Deep Reinforcement
Learning (DRL), as well as their algorithms Q-
learning and Deep Q-learning (DQL), respectively.
2.1 Reinforcement Learning
In RL there is a closed-loop interaction between the
agent and the environment, where the actions taken by
the agent based on the current state of the environment
influence the next state. At each action made by the
agent, the environment responds with a reward and
the next state. A reward is based on a trial-and-error
method, where a favorable output is ‘reinforced’, and
a non-favorable output is ‘punished’. The agent’s fi-
nal goal is to maximize the cumulative reward in the
long run. RL problems are commonly formulated as
a Markov Decision Process (BELLMAN, 1957) in
the form of a tuple (S, A, P
a
(s
t
, s
t+1
), Ra(s
t
, s
t+1
), γ)
where: S is a finite set of states;A is a finite set of
actions; P
a
(s
t
, s
t+1
) is the probability to move to state
s
t+1
when choosing action a in state s
t
; R
a
(s
t
, s
t+1
) is
the reward r
t+1
for passing from state s
t
to state s
t+1
after taking action a, and γ is the discount factor.
A RL task is called a MDP if a state signal con-
tains all the relevant information to make a decision,
i.e. the next state s
t+1
only depends on the immedi-
ately preceding state s
t
and action a
t
, and not on the
previous ones, but at the same time is successfully in-
formative. At each time step t, the agent observes the
environment and reads the current state s
t
in a finite
set of possible states S. It selects an action a
t
in a fi-
nite set of possible actions A at s
t
, and takes it using
actuators. At time t + 1, the environment returns the
reward r
t+1
and transitions to the next state s
t+1
, upon
which the agent relies for its future decisions.
RL must balance between exploration and ex-
ploitation to find the best sequence of actions. The
agent must exploit the actions that maximize the re-
ward, but also explore new actions that may lead to
future better rewards; To find the balance, the right
policy must be defined. ε-greedy policy is often used,
where the action that maximizes the accumulated re-
ward is chosen with an ε probability, otherwise a ran-
dom action is selected.
One of the elements of RL problems is the value
function. This element maps a state (or action-state
pair) into the corresponding expected reward. Among
all possible value functions for a state/state-action
pair, there is one that leads to the maximum return.
This function is called the optimal value function.
The agent estimates the values for states or action-
state pairs through experience. One of the most com-
mon methods for estimating these values is the Q-
value, which relies on doing the average of n observed
rewards for a given action a in a state s.
2.1.1 Q-Learning
In Q-learning, the goal is to learn the best next action
given the current state. For that, the algorithm uses a
Q-table to keep the values for each state-action pair.
This table allows the agent to calculate the maximum
expected future rewards for an action at each state.
Equation 1 defines the update function for the
value of each state-action pair;
Q
new
(s
t
, a
t
) ← Q(s
t
, s
t
) + α[r
t
+ γ max
a
[Q(s
t+1
, a)] − Q(s
t
, a
t
)] (1)
Where α is the learning rate (0 < α <= 1), which
defines how much the new value overrides the old
value. If 0, the agent exclusively exploits prior knowl-
edge, while if 1 the agent considers only explores, ig-
noring prior knowledge. The discount factor (γ) is
a parameter used in the reward function that weights
the immediate rewards over the future ones;
2.2 Deep Reinforcement Learning
In some decision problems, it is unfeasible to learn
all possible sate-action pairs accurately with RL, so
function approximators are used instead. Deep Rein-
forcement Learning (DRL) combines Deep Learn-
ing with Reinforcement Learning, by using deep
neural networks (DNN) to learn useful representa-
tion in RL problems. This enables the algorithms to
support high-dimensional and unstructured datasets,
2.2.1 Deep Q-Learning
To take advantage of learning through experience, but
without worrying about space and time limits, Deep-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
18

Mind (Mnih et al., 2015) researchers created a method
that combines both RL and DL, called DQL. This
technique estimates the Q-value of all possible actions
for a given state using deep neural networks. The
combination between RL and DL arise strong corre-
lations between subsequent iterations. To overcome
this issue, DQL provides a solution called Experi-
ence Replay, that stores the agent’s past experiences
into a dataset, where each experience is a four-tuple,
(s
t
, a
t
, r
t
, s
t+1
), and extract a random mini-batch of
these experiences to update the Q-values. To break
the strong correlation, DeepMind (Mnih et al., 2015)
researchers also propose a solution that is based on
duplicating the Q-network, creating a copy called tar-
get network. The difference between the two copies
are their parameters (weights) and how they are up-
dated. While Q-network’s parameters are trained, tar-
get network’s parameters are periodically synchro-
nized with the Q-network’s parameters. The idea is
that using the target network’s values to train the Q-
network will decorrelate the action-value with the tar-
get value and improve the stability of the network.
The agent selects an action according to an ε-
greedy policy, which is represented via a DNN. Then,
the same interaction between the agent and the envi-
ronment, as in Q-learning method, occurs.
3 RELATED WORK
3.1 Collaborative Task Allocation
Approaches
Research efforts on collaborative robots and tasks
have been multiple in the past few years. Zhang et al.
(Zhang et al., 2022) have designed a Human-Robot
Collaboration (HRC) framework to assemble a prod-
uct. The authors implement a dual-agent algorithm
that extends the DDPG algorithm, where the actor-
network of each agent processes the current state
and outputs their own actions, and subsequently, the
critic-network evaluates and calculates the value of
the taken actions. The reward function is based on
the difficulty and time each agent needs to complete
the collaborative assembly task, with a structure tree
to represent the assembly task.
Liu et al. (Liu et al., 2021) proposed a novel
training approach adapted from the DQL method and
called DADRL. This algorithms considers both the
robot and the human as agents, where the robot is
trained to learn how to make decisions, while the hu-
man agent represents the real human in HRC, demon-
strating the dynamic and stochastic properties of the
task. The aim is to teach the robot to be capable of
decision-making and task-planning ”under the uncer-
tainties brought by the human partner using DRL”, as
the authors explain (Liu et al., 2021).
Yu et al. (Yu et al., 2021) formulate a human-robot
collaborative assembly task as a chessboard game
with specific assembly constraints determined by the
game rules. The robot is trained with an algorithm
based on DRL, where a CNN is used to predict the
distribution of the priority of move selections and to
know whether a working sequence is the one resulting
in the maximum of the HRC efficiency.
Zhang et al. (Zhang et al., 2022), Liu et al. (Liu
et al., 2021) and Yu et al. (Yu et al., 2021) have shown
that DQL and DDPG-based algorithms are efficient in
solving decision-making and sequence planning re-
ducing problems and are efficient in complex tasks.
Most of these works, however, do not approach graph
structures and the advantages they might bring to col-
laboration in manufacturing sectors. Liu et al. (Liu
et al., 2021) use a chessboard setting, but they assume
this structure has limitations in representing some task
constraints and relations.
3.2 Graph Structures for Task
Allocation
In an assembly process, a task can be divided into
smaller assembly subtasks, some of which are suit-
able to be performed by a robot and others are more
complex and consequently require an operator to per-
form them (Zhang et al., 2022). Given this, building
a graph representing the possible sequences of oper-
ations needed to complete a process, the operation’s
actor and other sufficient information about the pro-
cess, is essential for an operator to perceive the task
easily and for the robot to be efficient and effective in
its assistance.
Mangin et al. (Mangin et al., 2022) developed a
system that uses HTM to share information between
the human and the robot and enable transparent com-
munication and mutual understanding. This high-
level hierarchical task representations is then trans-
formed into low-level policies to teach the robot to
successfully assist the human with supportive actions.
Murali et al. (Murali et al., 2020) proposed an
architecture that aims to teach a robot to adapt re-
actively to unpredictable human operators’s actions,
while minimizing the overall process time. A collabo-
rative task is represented as an ”and/or” graph, where
nodes correspond to states and hyper-arcs represent
the possible actions the agent can perform to reach a
particular state.
Yu et al. (Yu et al., 2020) map a human-robot col-
laborative assembly task into a chessboard game with
Dynamic Task Graphs for Teams in Collaborative Assembly Processes
19
specific assembly constraints determined by the game
rules, in which the chess piece move represents the
decision made by an agent, considering the task struc-
ture and constraints. The authors train the robot with
a combination of MCTS and a CNN. Using the chess-
board structure, the completion time of each agent
is formatted into a completion time matrix, which is
given, along with all time matrices, as input to the
CNN.
Hayes and Scassellati (Hayes and Scassellati,
2016) present a novel structure adapted from a tradi-
tional hierarchical structure, called CC-HTN, to rep-
resent the possible sequence of operations to complete
a task. The goal is to give flexibility to the planning
and allocation. From the CC-HTN, one can observe
the ordered sequences (chains) and the unordered se-
quences (cliques). Nodes represent actions as sub-
goals and edges represent environmental constraints
as compositions of subgoal completions.
All the solutions mentioned use hierarchical task
structures, which have shown to be extremely pow-
erful in supporting the planning of assembly tasks in
HRC and co-robot collaboration. These studies, how-
ever, have some limitations: (Mangin et al., 2022)
do not demonstrate results with complex tasks, not
knowing if the MC solver is efficient in collaborative
task planning; (Murali et al., 2020) and (Hayes and
Scassellati, 2016) do not approach how the task se-
quences and the optimal one are obtained, with the
first team considering them to be provided or com-
puted a priori. The chessboard structure proposed by
Yu et al. (Yu et al., 2021) presents some challenges in
representing the task conflicts and other complex task
relations.
4 PROPOSED SOLUTION
The goal of this project is to develop a system ca-
pable of automatically generating efficient assembly
sequences that respect precedence dependencies and
task pre-conditions in a collaborative environment,
while transmitting knowledge on the task in a graph
structure.
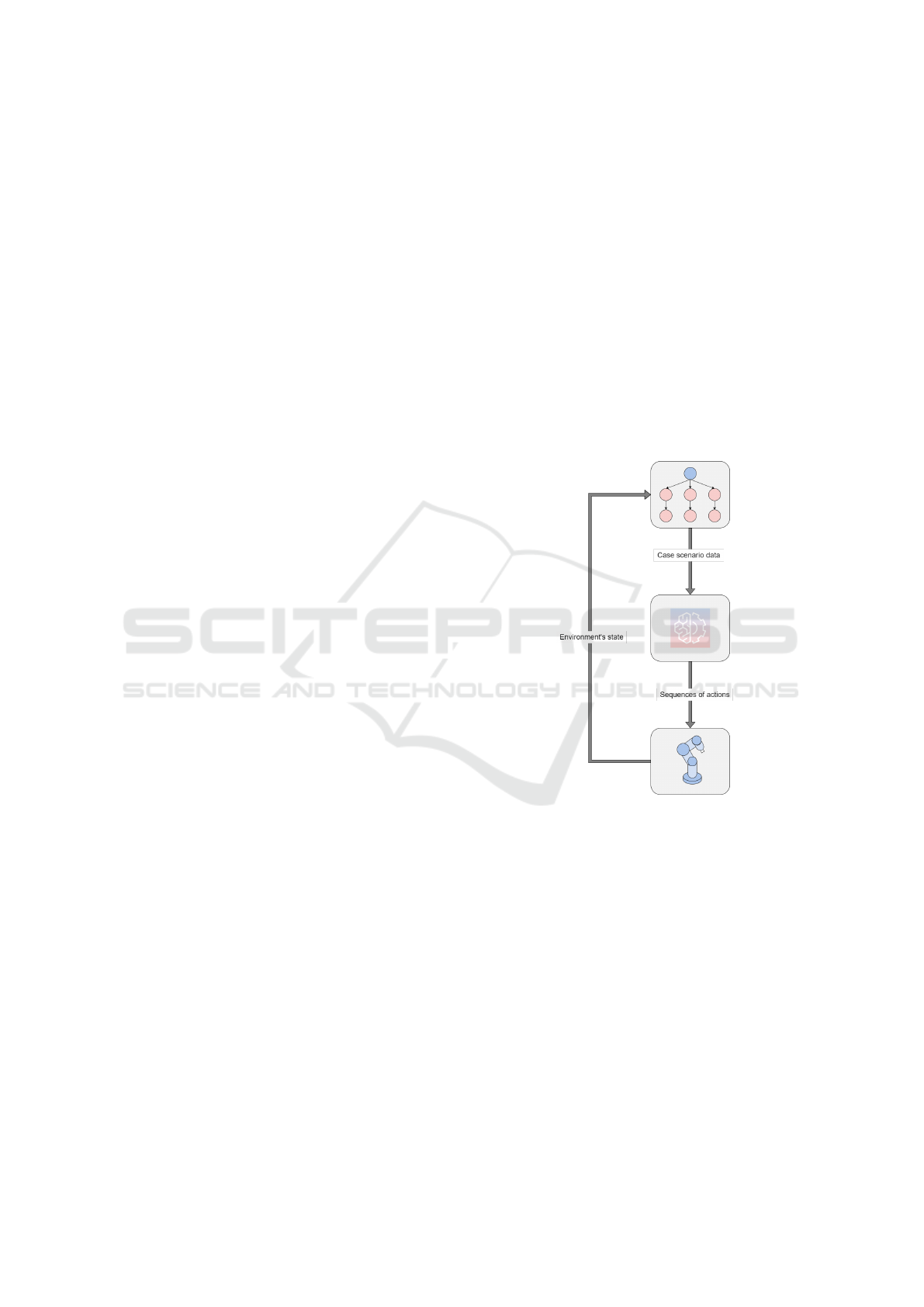
The proposed solution of this work is then an ar-
chitecture divided into three modules, which, directly
or indirectly, influence the performance of each other.
In the first module, the graph aggregates information
about the task (subtasks and their constraints) that
will be perceived by the agent to define the observa-
tion and action spaces on which the agent will run the
algorithm, as well as the possible sequences that will
be taken into account by the reward function of the
agent, so it penalizes actions that do not meet prece-
dence dependencies. The graph also reports the av-
erage time each operation takes to be completed by
each actor, which will influence the learning process
for task allocation. The agent, in the second mod-
ule, tries to successfully select the best sequence of
actions, using off-policy RL algorithms. The training
process ends with a Q-table that returns the action that
generates the maximum accumulated reward for each
state. Regarding the third module, the robotic manip-
ulator, at each step, will simulate the optimal action
and update the status of the task in the graph, particu-
larly the actions that are completed, that are being per-
formed and that are still to be done. The simulation
also allows an agent to perceive the execution time of
each action, as well as its actor. The closed-loop in-
teraction between the three modules is represented in
Fig. 1.
Figure 1: Flow of the architecture proposed as a solution.
The overall sequence result is validated using
the robotic simulator Coppelia Simulator, formerly
known as V-REP (Rohmer et al., 2013).
5 CASE STUDY
A furniture assembly task was chosen as a case sce-
nario, as it depicts a complex process that can result
in different final products. In particular, we focus in
the task of assembling tables as a case scenario. The
structure of the table was based on a design presented
by Zeylikman et al. (Zeylikman et al., 2017), which
constituent parts can be used to create a variety of dif-
ferent objects, such as chairs, shelves and consoles,
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
20

providing modularity and scalability to our model.
The table is comprised in 5 structural parts, one
base and four legs, and composed by 15 components.
A table leg consists of a dowel and one F-type bracket,
and the base needs one plywood. The T-type brack-
ets are used to assemble the base with the legs, and
the screws are the fasteners, which are fastened by
a screwdriver. Given its constituent parts, the task
can be easily discretized into 27 smaller and simpler
problems, called subtasks. This division is the key a
good representation of the task on a graph and conse-
quently a better understanding of the different possi-
ble sequences and the assigned resources.
We created two simpler scenarios called two-
leg-table assembly task and one-leg-table assembly
task, where a table only has two legs and is decom-
posed in 15 subtasks in the first scenario and has one
leg and is decomposed in 9 subtasks in the second
one. The idea is to create tasks that are less time-
consuming for the algorithm.
Each subtask of our tasks must be further decom-
posed into a sequence of operations, containing more
relevant and specific information about the task, such
as picking, placing, snapping, positioning, and fasten-
ing an object. The first four operations are based in
the same basic and common movements a robot may
perform in manufacturing: move the gripper to a po-
sition, grasp an object and/or release an object. Some
operations, such as fastening, require high precision
and are too complex for a robot to perform.
In the manufacturing industry, operators all have
different experience and knowledge about a task,
which influences the time each one takes to perform
an operation, as well as the probability of failure. It is
therefore essential that operators can be differentiated
by their level of expertise: beginner, intermediate or
expert. An expert, as opposed to a beginner, in aver-
age, performs the tasks with a lower time and a lower
variance.
6 IMPLEMENTATION
This section aggregates the implementation proce-
dures of each module to build our solution. The entire
system was developed in Python, using several pack-
ages like Networkx to to construct and draw graphs.
6.1 Task Graph Module
We define our tasks’ graph structure as a simple and
appealing hierarchical task structure, close to hu-
man intuition that has shown good performance in
allowing the agents to communicate and understand
each other’s actions. Our graphs are composed of
nodes and links, where the root, representing the task,
is divided into subtasks, which in turn are divided into
the sequence of concrete actions. Each node of our
graph is composed by the following three elements:
• id: unique node identification;
• type: classifies the node as task, subtask or oper-
ation;
• state: determines whether the node is still to be,
is being, or has already been executed. It allows
the agents to perceive the task’s evolution;
Operation type nodes, in addition to these, contain
four more parameters:
• operation: indicates which action the node refers
to (pick, place, snap, position or fasten). Its value
must then be a string;
• object: indicates which object the node refers to,
e.g. screw (string value);
• time robot: Estimated time of operation’s execu-
tion by the robot (integer value);
• time operator: Estimated time of operation’s ex-
ecution by the robot, depending on his/her exper-
tise (integer value).
The sub-task and task type nodes may also in-
clude an additional element, sequence, that expresses
whether the node is sequential, parallel or alterna-
tive, i.e. whether a task’s subsequent sub-tasks or a
sub-task’s subsequent operations might be done at the
same time by two different agents (parallel), must be
executed by a specific order of execution (sequential)
or must be performed exclusively (alternative). This
set of elements demonstrates the type of constraints
that may exist when executing a collaborative task
along with the complexity of the collaboration in a
human-robot or a robot-robot team. In our graphs, the
parallel operation is represented by ——, the sequen-
tial by → and the alternative by V.
The overall graph structure for the table assembly
task is illustrated in Fig. 2, simplified for better and
understandable visualization.
6.2 Robot Intelligence Module
The observation space of our algorithm’s MDP en-
vironment corresponds to the evolution of the task’s
status, i.e. each space is a tuple composed of the
number of completed subtasks and a list with the
objects/parts in the workspace. The last element
is important, as objects and parts that are in the
workspace influence the feasible sequences of ac-
tions. The initial state corresponds to no actions ex-
ecuted and no objects/parts in the workspace and the
Dynamic Task Graphs for Teams in Collaborative Assembly Processes
21
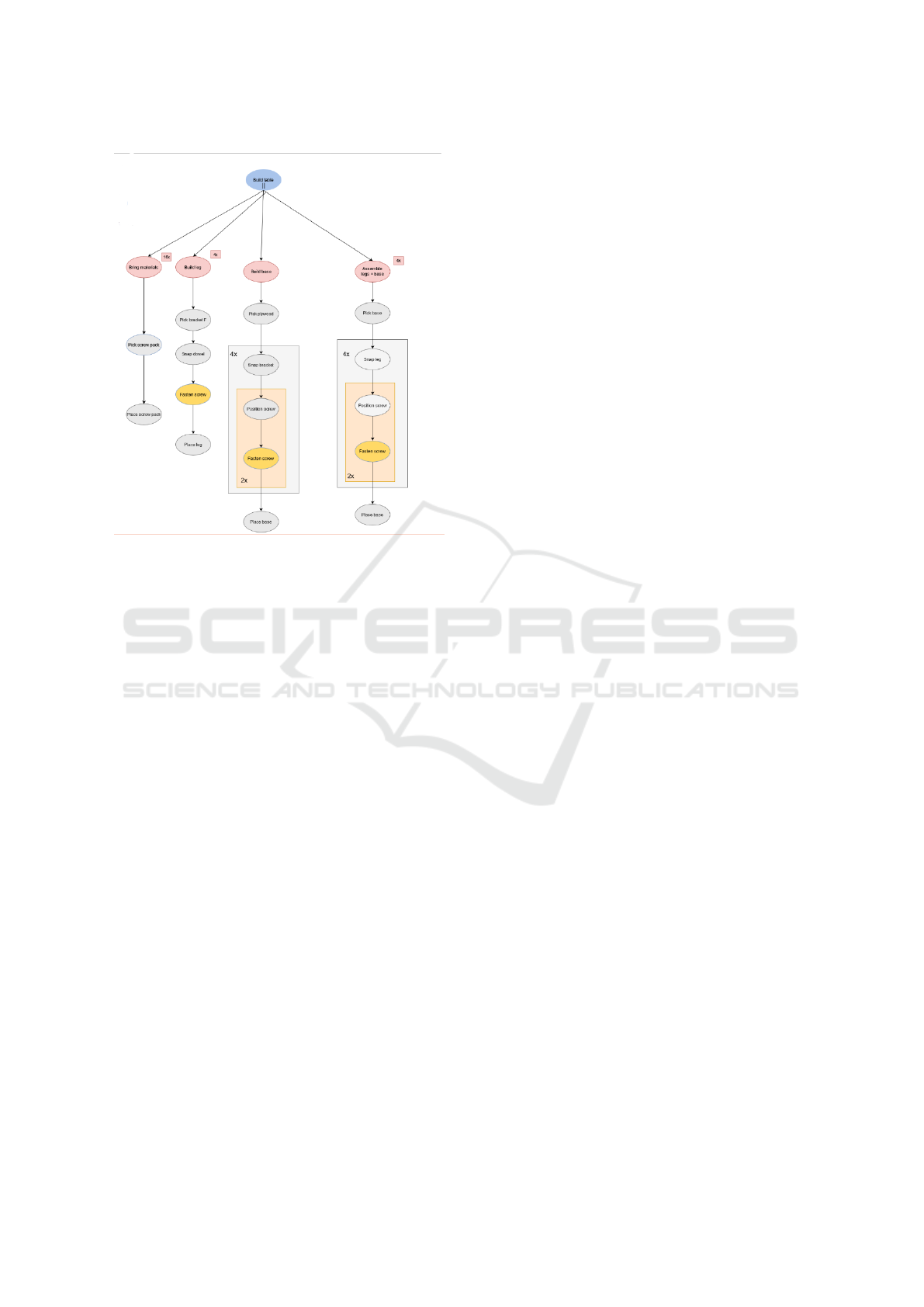
Figure 2: Graph structure for the table assembly task.
final state to all actions executed and all objects/parts
in the workspace. An action in our MDP environment
corresponds to a tuple composed of a sub-task and
the actor who will perform the sub-task. We started
by implementing Q-learning algorithm, since the Q-
table provides us easier analysis and interpretation of
the environment’s behaviour and the overall training
process results and evolution.
The system must generate only realistic scenarios,
i.e. assembly sequences with no repeated actions and
that satisfy precedence dependencies. Therefore, and
since the agent’s final goal is to maximize the cumu-
lative reward in the long run, the system must penal-
ize the sequences that do not meet the required con-
ditions. On the other hand, to ensure that the task
progresses, the environment must reward the status of
the global assembly task to guide the agent through
the decision-making. The states that do not satisfy
precedence dependencies are still considered during
the learning process, but penalized. The aim is to
assign low rewards to those states, making the robot
more robust to avoid undesired sequences. The final
reward function is given in Equation 2:
r
t
= ln(S
E
+ bias) − PP − RP, (2)
Where RP represents the penalty received for a se-
lected repeated action, PP corresponds to the penalty
given for not satisfying precedence dependencies, and
ε is the bias of S
E
, with a value of 0.1, to avoid the
problem caused by null progress at the beginning of
the task.
We started by focusing on a RL approach based on
successive interactions with the environment to learn
the Q-values and consequently find an optimal policy
that maximizes the cumulative reward, more specif-
ically, the Q-learning algorithm. This algorithm’s
Q-values matrix (Q-table) provides us easier analy-
sis and interpretation of the training process results
and evolution, as well as how the environment must
behave for the algorithm to converge. After, we pro-
ceeded to implement DQL for the agent to complete
an assembly task with high-dimensional space requir-
ing less time and memory. The MDP environment on
this DRL algorithm was defined using the OpenAI’s
Gym (Brockman et al., 2016) framework. Our obser-
vation and action spaces were represented as an Ope-
nAI Gym Discrete Space (Openai, 2022) with n ele-
ments. In the observation space n corresponds to the
total number of observation states, and in the action
space n corresponds to the total number of subtasks.
6.3 Simulation Module
The agent simulates the sequence of actions for the
given collaborative assembly task. But for that, it
needs the poses of each object, which are given in
a text file. Each operation the robot must perform
is divided into one or several specific and discrete
movements and sent to a previously implemented
API connected, which decodes the movements and
sends them, through sockets, to the V-REP simulator.
The simulation module introduces a new node
type to the graph, the wait node, which represents
the time ”lost” between an exchange of actors in
the execution of a subtask. During the simulation,
the graph nodes are colored with different colors
depending on the node status, i.e. the respective
task/subtask/operation has not been performed, is in
progress, or is finished.
In addition to a collaborative assembly, our tasks
can also be performed manually or automatically, i.e.
the task is completely performed by the human agent
or executed only by the robot (with the exception of
the fastening operation, which only can be done by
the human operator). In these two options, when an
agent fails the performance of an operation or there
is an external error, the graph suggests the agent to
repeat the action. In the collaborative option, failures
are not addressed.
In the end of our simulation, we have a system
composed of three modules, where each module feeds
the others, directly or indirectly, with the necessary
data for they to successfully run.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
22
7 EXPERIMENTS AND ANALYSIS
We started by training the agent to learn feasible as-
sembly sequences, with no prior knowledge, with Q-
learning for the tasks with 15 and 9 actions. We
run 100 trials for each experiment and compare the
training efficiency through the running average re-
ward evolution and the percentage of possible assem-
bly sequences learned. After trying several sets of
reward weights and hyperparameter values, the agent
was able to converge the reward in 400 episodes with
a weight of 20 for each reward parameter, α and γ
defined with values of 0.99 and the exploration rate
decaying by 0.01, for the one-leg-table task. And
the minimum number of episodes from which we can
train the agent to complete two-leg-table task was 27
000 episodes, with an exploration rate decay of 0.001
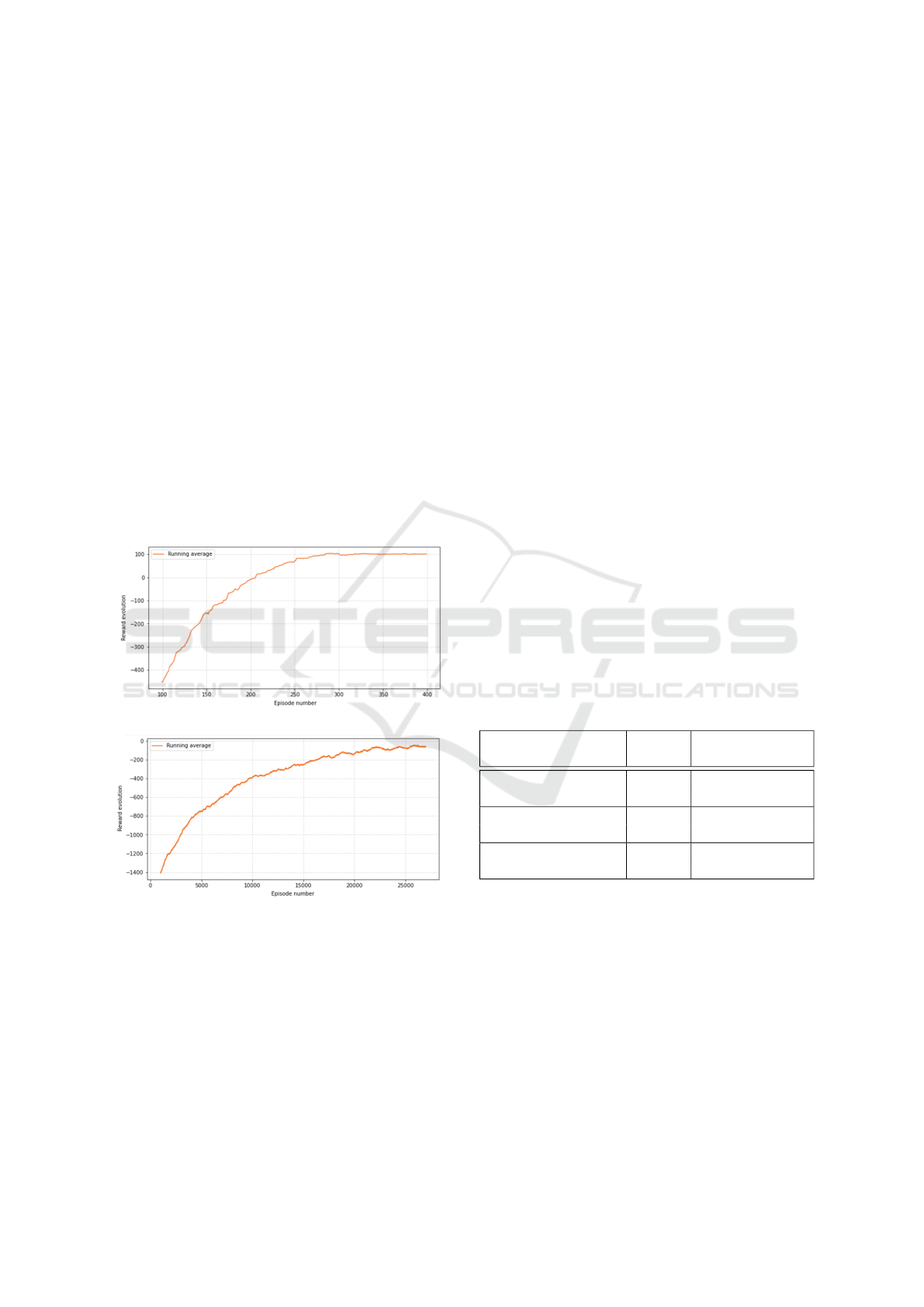
and the same weights for the reward parameters. Fig.
3 illustrates the reward evolution for the two processes
where the agent was successful in completing the with
feasible sequences in 100% of the experiments.
(a)
(b)
Figure 3: Running average reward evolution for (3a) the
one-leg-table assembly task with 400 episodes and an ex-
ploration rate decay of 0.01, and (3b) the two-leg-table as-
sembly task with 27 000 episodes and a exploration rate
decay of 0.001.
The balance between exploration and exploita-
tion, represented by the exploration rate which was
decayed at each episode by the epsilon decay, has
shown to have a large impact on the agent’s success.
A lack of exploration led to a early reward stagna-
tion. On the other hand, excessive exploration re-
quires more episodes for the agent to learn and the
training gets more time consuming. The reward
weights has also proven to significantly influence the
learning results. The penalties’ weights must be at
least equal to the weight of the progress state for the
agent to learn which state-actions pairs lead to higher
rewards. The processes trained with higher reward
penalties return lower rewards in the first episodes,
but the overall convergence curve is sharper and the
evolution is higher.
After learning possible assembly sequences, the
goal is now to minimize the global time to complete
the task. For that, we add a new penalty to the reward
function representing the completion time of each ac-
tion, SubtaskTime. To evaluate the algorithm’s deci-
sions, three performance metrics are used:
• The time required to finish the global assembly
task;
• The operator’s working time on the assembly
task;
• The number of operations assigned to the oper-
ator.
We ran 300 experiments, in which for every 100
executions the operator has a different expertise (be-
ginner, intermediate and expert). We compared the
percentage of actions assigned to each actor and the
results are shown in Table 1.
Table 1: Percentage of actions allocated for each actor at
each operator’s expertise.
Operator’s Expertise Actor
Percentage of
actions allocated
Beginner
Human
∼
=
7.13%
Robot
∼
=
92.87%
Intermediate
Human
∼
=
50.9%
Robot
∼
=
49.1%
Expert
Human
∼
=
96.0%
Robot
∼
=
4%
As expected, even considering the time taken to
switch between actors when the operator is required
to fasten screws, the robot was assigned to more ac-
tions if its human partner is a beginner, since the robot
takes, on average, less time to complete the task. An
intermediate operator has a robot-like assembly speed
and hence both agents have a similar percentage of
subtasks allocated. An expert, on the other hand,
has more experience and ease in performing assem-
bly tasks and is assigned to more actions.
Table 2 details the mean and standard deviation
of the global task completion time with or without
Dynamic Task Graphs for Teams in Collaborative Assembly Processes
23

the robot learning task allocation, and also consider-
ing each operator’s expertise. We can see that without
learning task allocation, the global assembly duration
is higher and has more variance than with the agent
learning task allocation. This happens because with-
out considering the time, the agent assigns the actor
randomly, instead of assigning the one that executes
the actions in less time. As the expertise of the oper-
ator increases, the mean duration of the task, consid-
ering optimal task allocation, decreases, as expected.
The standard deviation of task time in the experiments
with a beginner operator and with learning task allo-
cation is lower, because the operations are mostly as-
signed to the robot, which is more constant, due to its
automation, than a human in performing tasks.
Table 2: Mean and standard deviation of the global task
duration, in seconds.
Operator’s
Expertise
Task
allocation
Mean
Standard
deviation
Beginner
Yes 135.2 0.23
No 143.22 3.46
Intermediate
Yes 126.58 0.42
No 128.04 1.26
Expert
Yes 73.25 0.42
No 80.7 5.32
For the table assembly task, with 27 actions, we
obtained the results from Fig. 4, training the agent
with the DQL algorithm. The reward seems to be
converging until around the episode number 20 000,
although with more episodes it reduces the reward
value.
Figure 4: Running average reward evolution for the table
assembly task with Deep Q-network.
The expected results, given the high-space dimen-
sionality of the case study (1 812 473 states) would be
a faster convergence with the DQL algorithm. How-
ever, this was not verified. From our intuition, this
happened due to the complexity and number of pa-
rameters that are needed to optimize, in the DQL net-
work, which due to time constraints it was not possi-
ble to evaluate the impact of various combinations of
parameters, thus not being possible to achieve the op-
timal network that would lead to a faster convergence
by this algorithm.
8 CONCLUSION
A novel system has been proposed to tackle the prob-
lem of sequence allocation and scheduling optimiza-
tion in collaborative processes. This system trains an
agent with RL and DRL approaches and simulates the
process on top of a task graph represented as a combi-
nation of hierarchical structures and directed graphs.
Two types of experiments were performed: the first
with the aim of generating feasible sequence of ac-
tions to complete the task given precedence depen-
dencies, and the second with goal of task allocation
to an actor. The system was able to converge success-
fully in 3 scenarios: a table with 1 leg, a table with
2 legs and a table with 4 legs, in 400, 27 000 and 20
000 episodes, respectively. We could obtain a system
that acquires data from the graph and sends back deci-
sions to trigger nodes. The graph allow us to visualize
the sequences triggered by the robot, from the begin-
ning of the process to its conclusion. We obtained
an algorithm that makes decisions about sequences of
operations and allows the team to complete the task
collaboratively and obtain the final product. Last but
not least, We have a simulation through which we can
validate if the process is correct.
In the future, the model developed in this paper
can be extended to multi-agent planning, which will
allow simultaneous execution of sequences between
the two agents, and consequently improve the solu-
tion’s efficiency and application in real-life scenarios.
Additionally, we will further address failures within
collaboration, making the robot capable of compen-
sating for an error in a sequence. Our solution would
have more valuable results if it was tested with a real
UR5 collaborative robot arm, increasing the transfer-
ability to real-world applications.
ACKNOWLEDGEMENTS
INDTECH 4.0 – New technologies for intelligent
manufacturing. Support on behalf of IS for Techno-
logical Research and Development (SI a Investigac¸
˜
ao
e Desenvolvimento Tecnologico). POCI-01-0247-
FEDER-026653
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
24

REFERENCES
BELLMAN, R. (1957). A markovian decision process.
Journal of Mathematics and Mechanics, 6(5):679–
684.
Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., and Zaremba, W. (2016). Ope-
nai gym. CoRR, abs/1606.01540.
Hayes, B. and Scassellati, B. (2016). Autonomously
constructing hierarchical task networks for planning
and human-robot collaboration. In 2016 IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 5469–5476.
Liu, Z., Liu, Q., Wang, L., Xu, W., and Zhou, Z. (2021).
Task-level decision-making for dynamic and stochas-
tic human-robot collaboration based on dual agents
deep reinforcement learning - the international jour-
nal of advanced manufacturing technology.
Mangin, O., Roncone, A., and Scassellati, B. (2022). How
to be helpful? supportive behaviors and personal-
ization for human-robot collaboration. Frontiers in
Robotics and AI, 8.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Veness,
J., Bellemare, M. G., Graves, A., Riedmiller, M., Fid-
jeland, A. K., Ostrovski, G., and et al. (2015). Human-
level control through deep reinforcement learning.
Murali, P. K., Darvish, K., and Mastrogiovanni, F. (2020).
Deployment and evaluation of a flexible human-robot
collaboration model based on AND/OR graphs in a
manufacturing environment. CoRR, abs/2007.06720.
Openai (2022). Gym/discrete.py at master · openai/gym.
Rohmer, E., Singh, S. P. N., and Freese, M. (2013). Cop-
peliasim (formerly v-rep): a versatile and scalable
robot simulation framework. In Proc. of The Interna-
tional Conference on Intelligent Robots and Systems
(IROS).
Yu, T., Huang, J., and Chang, Q. (2020). Mastering the
working sequence in human-robot collaborative as-
sembly based on reinforcement learning. IEEE Ac-
cess, 8:163868–163877.
Yu, T., Huang, J., and Chang, Q. (2021). Optimizing task
scheduling in human-robot collaboration with deep
multi-agent reinforcement learning. Journal of Man-
ufacturing Systems, 60:487–499.
Zeylikman, S., Widder, S., Roncone, A., Mangin, O., and
Scassellati, B. (2017). The HRC model set for human-
robot collaboration research. CoRR, abs/1710.11211.
Zhang, R., Lv, Q., Li, J., Bao, J., Liu, T., and Liu, S.
(2022). A reinforcement learning method for human-
robot collaboration in assembly tasks. Robotics and
Computer-Integrated Manufacturing, 73:102227.
Dynamic Task Graphs for Teams in Collaborative Assembly Processes
25
