
Deep Learning Model Selection With Parametric Complexity Control
Olga Grebenkova
1,2 a
, Oleg Bakhteev
1,3 b
and Vadim Strijov
3 c
1
Moscow Institute of Physics and Technology (MIPT), Russia
2
Skolkovo Institute of Science and Technology (Skoltech), Russia
3
FRC CSC RAS, Russia
Keywords:
Model Complexity Control, Hypernetworks, Variational Model Optimization, Bayesian Inference.
Abstract:
The paper is devoted to deep learning model complexity. It is estimated by Bayesian inference and based
on a computational budget. The idea of the proposed method is to represent deep learning model parameters
in the form of hypernetwork output. A hypernetwork is a supplementary model which generates parameters
of the selected model. This paper considers the minimum description length from a Bayesian point of view.
We introduce prior distributions of deep learning model parameters to control the model complexity. The
paper analyzes and compares three types of regularization to define the parameter distribution. It infers and
generalizes the model evidence as a criterion that depends on the required model complexity. Finally, it
analyzes this method in the computational experiments on the Wine, MNIST, and CIFAR-10 datasets.
1 INTRODUCTION
The paper considers the problem of a deep learning
model selection. A deep learning model is a super-
position of differentiable functions with respect to pa-
rameters. In the paper, we study the problem of model
selection based on its complexity. We consider the
model complexity as a value assigned during model
fine-tuning depending on the desired model perfor-
mance or size. Since the deep learning model se-
lection procedure is computationally expensive (Zh-
moginov et al., 2022), we propose to optimize not a
distinct model but a family of models at once. We
parameterize it by a desired model complexity.
To deal with the problem of model complexity
control we propose to represent the parameters of the
model in the form of a hypernetwork. A hypernet-
work is a function, which generates the parameters of
the desired model (Ha et al., 2016). In other words, a
hypernetwork is a mapping from a value responsible
for the complexity of the desired model to a set of its
parameters. Opposite to (Ha et al., 2016), where the
hypernetwork was used to simplify the model param-
eters representation, we consider a hypernetwork as
a mapping from the only one value. Another variant
a
https://orcid.org/0000-0002-1169-5405
b
https://orcid.org/0000-0002-6497-3667
c
https://orcid.org/0000-0002-2194-8859
of hypernetworks usage was presented in (Lorraine
and Duvenaud, 2018), where the authors investigated
hypernetworks’ feasibility to predict best model hy-
perparameters. Opposite to (Zhmoginov et al., 2022)
where the complex deep learning model was used as
a hypernetwork, we focus on simple hypernetwork
models. We concentrate more on their statistical prop-
erties than on final performance of the obtained mod-
els.
This paper uses the Bayesian approach to model
selection. We introduce probabilistic assumptions
about the distribution of deep learning model param-
eters (Graves, 2011; Bakhteev and Strijov, 2018).
We propose to generalize the evidence to control the
model complexity. To demonstrate that we gather
models of different complexity using optimized hy-
pernetworks, we employ the model pruning meth-
ods (Graves, 2011; Han et al., 2015). This paper
investigates a simple case when the model parame-
ters are assumed to be distributed with a Gaussian
distribution (Graves, 2011). In order to evaluate the
ability of hypernetwork to generate model param-
eters we compare two probabilistic loss functions.
These functions are optimized using the variational
Bayesian approach (Graves, 2011; Bakhteev and Stri-
jov, 2018). We also investigate a deterministic case
when the model parameters are optimized straight-
forwardly with l
2
-regularization. Both of these ap-
proaches, probabilistic or deterministic, are success-
Grebenkova, O., Bakhteev, O. and Strijov, V.
Deep Learning Model Selection With Parametric Complexity Control.
DOI: 10.5220/0011626900003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 2, pages 65-74
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
65
fully used for the model compression (Graves, 2011;
Han et al., 2015) and are further developed for more
sophisticated pruning techniques (Jiang et al., 2019;
Louizos et al., 2017). The resulting hypernetworks
generate both simple and complex models depending
on the required model properties.
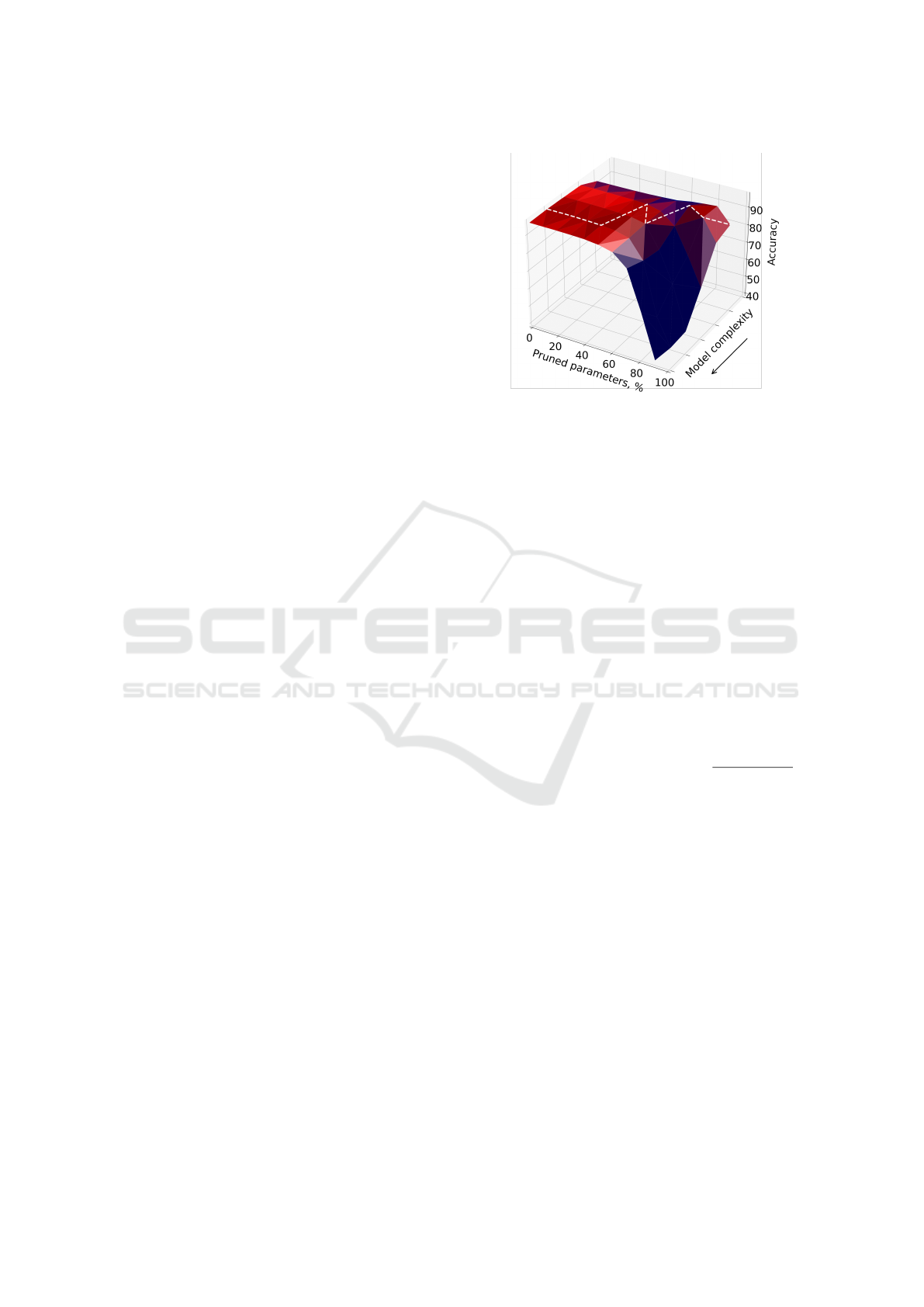
The Figure 1 shows an example of the resulting
accuracy surface for the models with different com-
plexity. Along one axis we plot the model complex-
ity, along two others the number of deleted model’s
parameters and accuracy of the model. As we can see
models with greater complexity have greater accuracy
at the beginning of pruning procedure. But they have
significant decrease during it. At the same time mod-
els with small complexity are more robust.
Our contributions are:
1. we propose a method of deep learning model op-
timization with complexity control. Instead of op-
timizing a model with some predefined hyperpa-
rameter value that controls the model complex-
ity, we propose to optimize a family of models.
This family is defined using a mapping that gener-
ates model parameters based on the desired model
complexity;
2. we investigate two forms of model loss functions
that are based on the evidence lower bound. We
compare them with a simple deterministic model
optimization with l
2
regularization and analyze
their properties for our optimization method;
3. we give some brief theoretical justification for the
proposed method and empirically evaluate its per-
formance for the deep learning model selection.
4. To demonstrate the proposed idea we carry our
computational experiments on MNIST (LeCun
and Cortes, 2010), Wine (Blake, 1998) and
CIFAR-10 (Krizhevsky et al., ) datasets.
2 PROBLEM STATEMENT
Consider the classification problem. In this paper, we
research to what extent it is possible to control the
model complexity at the inference step. For this rea-
son, we introduce a method of model selection using
hypernetworks, a parametric mapping from a com-
plexity value to a set of model parameters. At the
training step, we consider complexity value as a ran-
dom number. During the model’s fine tuning, this
value can be assigned for the optimal computational
budget. Below we introduce the details of the ap-
proach.
There is given a dataset: D = {x
i
, y
i
} i =
1, .. . , m, where x
i
∈ R
m
, y
i
∈ {1, . . . ,Y }, Y is a num-
Figure 1: An example of hypernetwork accuracy surface:
significant complexity regularization implies models with
lower accuracy and higher robustness under pruning. Sur-
face color vary from dark blue to dark red and shows rep-
resent the accuracy relative to other models with the same
number of model parameters. The colors of the white line
marks the most optimal models for different complexity val-
ues.
ber of classes. The model is a differential function
f(x, w) : R
m
× R
n
−→ R
Y
, where w ∈ R
n
is space of
the model parameters. Introduce a prior distribution
of the parameter vector in R
n
:
p(w|α
pr
) ∼ N (0, α
pr
I), α
pr
> 0. (1)
Although the parameter α
pr
of the prior distribu-
tion can be optimized (Graves, 2011; Bishop, 2006),
we suppose that it is fixed during the model optimiza-
tion (Graves, 2011; Atanov et al., 2019). We use
a diagonal matrix α
pr
I as the covariance matrix for
distributions (Graves, 2011) to simplify the optimiza-
tion procedure. Then p(w|D, α
pr
) =
p(D|w)p(w|α
pr
)
p(D)
is
the posterior distribution of the parameters vector w
with the given dataset D and the log-likelihood func-
tion log p(D|w) =
∑
(x,y)∈D
log p(y|x, w). It depends
on the model f and its parameters w. To get the pos-
terior distribution p(w|D, α
pr
) one must calculate an
evidence integral:
p(D|α
pr
) =
Z
w∈R
n
p(D|w)p(w|α
pr
)dw. (2)
Since the integral (2) is intractable, we
use the variational approach. Suppose that
a parametric variational distribution is given:
q(w|θ) ∼ N (m, A
−1
ps
), A
−1
ps
= diag(α
ps
), where
θ = (m, A
−1
ps
) are the mean vector and the covariance
matrix approximating unknown posterior distribu-
tion p(w|D, α
pr
). Estimate the logarithm of the
integral (2) (Bishop, 2006) :
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
66

log p(D|α
pr
) ≥ −D
KL
q(w|θ)||p(w|α
pr
)
+
+ E
q(w|θ)
log p(D|w). (3)
The first term in (3) is the difference between a
posterior and a prior distribution of parameters. It sets
the complexity of the parameter distribution based on
prior assumptions (1). The Kullback-Leibler diver-
gence determines it. This term controls the divergence
between the prior and the variational distribution and
thus can be interpreted as a complexity regularization
term (Graves, 2011). The second term in formula (3)
is the expectation of the likelihood log p(D|w).
Define the problem of model parameters optimiza-
tion by the generalized evidence function L. It can be
defined in different ways. In this paper we compare
two variants:
L
1
(λ) = −λD
KL
q(w|θ)||p(w|α
pr
)
+
+ E
q(w|θ)
log p(D|w); (4)
L
2
(λ) = −D
KL
q(w|θ)||p(w|
1
λ
α
pr
)
+
+ E
q(w|θ)
log p(D|w). (5)
The first expression (4) controls the prior dis-
tribution importance multiplying it by the value λ.
This function is generalization of the evidence lower
bound, but formally it does not proceed from the evi-
dence expression. Below we prove a statement estab-
lishing the connection between this function and the
evidence in asymptotics. The second expression (5)
controls the importance of the prior multiplying the
covariance matrix by
1
λ
. The intuition behind this ex-
pression is the larger λ the closer w is to zero, and the
more important the regularization is for optimization.
In this paper we compare these loss functions with
a simple deterministic loss with l
2
-regularization, see
the paper (Han et al., 2015),
L
3
(λ) = −λkwk
2
+ log p(D|w). (6)
The following theorem establishes a relation be-
tween the expressions presented above.
Theorem 1. The following relations are true for the
presented loss functions (4),(5),(6):
1. Let the vector α
ps
have small enough norm such
that we can approximate q(w|θ) with the Dirac
delta function δ(µ). Then for the fixed non-
optimized vector α
ps
the optimization of these ex-
pressions is equivalent: L
1
(λ) ≈ L
3
(
λ
2α
pr
).
2. Let the vector α
ps
have small enough norm such
that we can approximate q(w|θ) with the Dirac
delta function δ(µ). Then for the fixed non-
optimized vector α
ps
the optimization of these ex-
pressions is equivalent: L
2
(λ) ≈ L
3
(
λ
2α
pr
).
3. Let m =
m
0
λ
, m
0
∈ N, m 0, m
0
0. Then the
function (4) converges almost surely to the to ev-
idence lower bound (3) for the random sample
ˆ
D, |
ˆ
D| = m
0
with m
0
→ ∞.
Proof. Let’s prove the first statement. For a small
enough norm of the vector α
ps
we get q(w|θ) ∼ δ(µ),
where δ is the Dirac delta function. Then L
1
(λ) ≈
−λD
KL
q(w|θ)||p(w|α
pr
)
+ log p(D|µ).
Then we get the following expression up to a con-
stant: −λD
KL
q(w|θ)||p(w|α
pr
)
= −
1
2α
pr
λµ
T
µ +C,
where C is a constant, which does not depend on the
optimized parameters µ of the variational distribution
q. By leaving only the term related to the gradient we
get the expression: L
1
(λ) ≈ log p(D|µ) −
λ
2α
pr
||µ||
2
,
which equals to L
3
(
λ
2α
pr
). The proof for statement 2
is analogous to the proof above.
For the proof of the third statement, consider the
function
1
m
L
1
(λ). Using the Strong Law of large
numbers we get:
1
m
L
1
(λ)
a.s.
→ −
λ
m
D
KL
q(w|θ)||p(w|α
pr
)
+ E
x,y
E
q(w|θ)
log p(y|w, x), (7)
where E
x,y
is a an expectation over objects of the gen-
eral population corresponding to the dataset D. Sim-
ilarly consider the evidence lower bound for the ran-
dom sample
ˆ
D, |
ˆ
D| = m
0
, divided by m
0
:
−
1
m
0
D
KL
q(w|θ)||p(w|α
pr
)
+
1
m
0
E
q(w|θ)
log p(
ˆ
D|w)
a.s.
→
a.s.
→ −
1
m
0
D
KL
q(w|θ)||p(w|α
pr
)
+E
x,y
E
q(w|θ)
log p(y|w, x).
The last expression equals to (7) as required to
prove.
The first and the second statements from the
theorem establish a relationship between two loss
functions (4),(5) based on probabilistic assump-
tions and non-probabilistic loss function with l
2
-
regularization (6) for the case when the vector α
ps
cor-
responding to the variational covariance A
−1
ps
is suffi-
ciently small. Although these two probabilistic-based
expressions are equivalent for this especial case, in
general they differ:
L
1
(λ) − L
2
(λ) ∝ −(λ + 1) logdet A
−1
ps
. (8)
This difference gives us a different interpretation
of λ in these two loss functions: whenever in (4) the
value λ monotonically controls the influence of the
prior, there is no monotonic dependency between a
regularization term D
KL
and λ in (5). This leads us to
different results when varying value λ.
Deep Learning Model Selection With Parametric Complexity Control
67

The third statement of the theorem shows that the
expression from (4) can be considered as a correct
probabilistic approach for variational parameters opti-
mization, where λ controls the dataset size for the ev-
idence lower bound. Both of the expressions (4),(5)
can be considered as correct loss functions based
on probabilistic assumptions with regularization that
controls the importance of prior distribution. How-
ever, only the first expression allows us to control the
prior importance straightforwardly using the value λ.
Introduce the set of values for the complexity
value λ ∈ Λ ⊂ R
+
. We want to find a mapping G :
Λ −→ R
n
so that for the arbitrary complexity value
λ ∈ Λ the model parameters would give the maximum
for the following functions:
G
1
(λ) =arg max
θ
(E
q(w|θ)
log p(D|w)
− λD
KL
(q(w|θ)||p(w|α
pr
))),(9)
G
2
(λ) =arg max
θ
(E
q(w|θ)
log p(D|w)
− D
KL
(q(w|θ)||p(w|
1
λ
α
pr
))),(10)
G
3
(λ) = argmax
w∈R
n
(log p(D|w) − λkwk
2
). (11)
The presented mappings correspond to the optimized
functions (4),(5),(6).
3 HYPERNETWORKS FOR THE
MODEL COMPLEXITY
CONTROL
Solving the optimization problem (9) for an arbitrary
value λ ∈ Λ is a computationally challenging task. We
propose to use a hypernetwork to solve it. This al-
lows us to control the model complexity not during
the training step but at the inference step or fine-tune
the model for the desired complexity in one-shot man-
ner.
Introduce the set of parameters Λ, which control
the complexity of the model. Hypernetwork is a para-
metric mapping from the set Λ to the set of model
parameters: G : Λ × R
u
→ R
n
, where R
u
is the set of
valid hypernetwork parameters. In our work we use
the following linear mapping:
G
linear
(λ) = λb
1
+ b
2
, (12)
where b
1
, b
2
∈ R
u
are the vectors, which are do not
depend on λ.
A natural extension of such linear mapping is the
piece-wise linear one:
G
piecewise
(λ) =
N−1
∑
i=0
F(t
i
,t
i+1
, λ), (13)
F(t
i
,t
i+1
, λ) =
(
b(t
i
) +
b(t
i+1
)−b(t
i
)
t
i+1
−t
i
(λ −t
i
),t
i
≤ λ ≤ t
i+1
,
0, otherwise,
where b ∈ R
u
: [0, 1] → R
n
; t
i
∈ [0, 1], N is a number
of regions, where this function is linear.
Algorithm 1: The algorithm of the hypernetwork train-
ing.
Require: hypernetwork G, desired model f, loss
function L, training dataset D
1: for every batch
ˆ
D of the dataset D do
2: sample logλ
sample
∼ P(λ)
3: obtain w from G(λ
sample
)
4: compute L(f(w,
ˆ
D))
5: backpropogate and update hypernetwork G
6: end for
7: return trained hypernetwork G
Algorithm 2: The algorithm of the hypernetwork infer-
ence.
Require: trained hypernetwork G, desired model f,
testing dataset D, desired complexity λ
desired
, cri-
teria for removing of the parameters g
1: obtain w from G(λ
desired
)
2: compute accuracy for model f(w, D)
3: use criteria g to find the most uninformative pa-
rameters
ˆ
w
4: update weights w = w \
ˆ
w
5: return accuracy for different percent of deleted
parameters
To approximate the optimization prob-
lems (9), (10), (11) we propose to optimize the
parameters U ∈ R
u
of the hypernetwork G by
randomly generated values of the complexity value
λ ∈ Λ:
E
λ∼P(λ)
(log p(D|w) −
− λD
KL
(q(w|θ)||p(w|α
pr
)) → max
U∈R
u
,(14)
E
λ∼P(λ)
(log p(D|w) −
− D
KL
(q(w|θ)||p(w|
1
λ
α
pr
))) → max
U∈R
u
,(15)
E
λ∼P(λ)
(log p(D|w) − λkwk
2
) → max
U∈R
u
, (16)
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
68

where P(λ) is prior distribution on the set Λ. In this
paper we use log-uniform distribution as the prior dis-
tribution: log λ ∼ U[L, R], where values L, R are given
in the experiments section. This allows us to sig-
nificantly vary the desired model complexity during
training. Note, that in this paper we consider λ only
as a value that should be tuned at the inference step
and not expected to be inferred in strictly Bayesian
way. The algorithm of the hypernetwork training is
shown in Algorithm 1. The scheme of training pro-
cedure is presented in Fig. 2. After the inference step
for a single hypernetwork G we can obtain parame-
ters for models of different complexity, which already
have high accuracy results without fine-tuning.
(16) can be considered as an analogue of objective
function from (Lorraine and Duvenaud, 2018). We
will treat it as a baseline model.
3.1 Model Pruning
As it was mentioned before, deep learning models
have an excessive number of parameters. So one of
the ways to compare models, obtained by different
approaches, is to prune them and look at their per-
formance at the same pruning level. Therefore the pa-
rameters of each model are pruned after optimization
using the approach described in (Graves, 2011). The
algorithm of hypernetwork inference is presented in
Algorithm 2. As the criterion for removing the param-
eters we use the relative density of the model (Graves,
2011):
g
var
(w
i
) ∝ exp
−
µ
2
i
2σ
2
i
, (17)
where µ
i
, σ
i
are the i − th components of the mean
vector m and the covariance matrix A
−1
ps
of learned
variational distribution. We also consider simplified
criterion, which can be applied without probabilistic
assumptions (Han et al., 2015):
g
simple
(w
i
) ∝ exp
−w
2
i
. (18)
The proposed method is based on the assumption
that hypernetwork G approximates the models opti-
mized with different values for the complexity value
λ not only in terms of performance but also in sta-
tistical properties. This allows us to tune and prune
model’s parameters derived from hypernetwork simi-
larly to usual model’s parameters. The following the-
orem confirms this assumption for the simple case
of a compact domain containing the minimum of the
model for all complexity values.
Theorem 2. Let the following conditions be satisfied:
1. there is a given model f(w) and an continuous loss
function L;
2. there is a compact region U ∈ R
n
that contains
only one minimum L(w
∗
(λ)) ∈ U, L(w
∗
(λ)) < ∞
for every λ ∈ Λ;
3. there is a sequence of model parameters
L(w
n
(λ)) 6= L(w
∗
(λ)) ∀n L(w
n
(λ)) ∈ U such
that E
λ∼P(λ)
L(w
n
(λ)) →
n→∞
max.
Then the continuous function for the sequence
of model parameters converge in distribution to the
value for minimum g(w
n
(λ))
p
→ g(w
∗
(λ)). Under g
we can consider the criterion for removing the pa-
rameters.
Proof. By definition w
∗
(λ) gives the maximum for
loss function L. So due to the third condi-
tion E
λ∼P(λ)
L(w
n
(λ)) →
n→∞
E
λ∼P(λ)
L(w
∗
(λ)). Then
from linearity of expected value E
λ∼P(λ)
|L(w
∗
(λ)) −
L(w
n
(λ))| →
n→∞
0, which means that the value of op-
timisation function for sequence of model param-
eters converge in mean to the value for minimum
L(w
n
(λ))
L
1
→ L(w
∗
(λ)). We can show that the ar-
gument w
n
of the function L converges to w
∗
in
mean. Suppose that this fact is not true, then ∃ε >
0 : ∀i ∃ j > i : E
λ∼P(λ)
|w
j
(λ) − w
∗
(λ)| > ε.
Let δ be the maximum value of the func-
tion L for w
j
(λ) from the region U so that
E
λ∼P(λ)
|w
j
(λ)−w
∗
(λ)| > ε. Note that δ < L(w
∗
(λ)).
Then there exists an infinite subsequence of
parameters that L(w
j
(λ)) ≤ δ < L(w
∗
(λ)).
Since E
λ∼P(λ)
|L(w
∗
(λ)) − L(w
n
(λ))|
n→∞
→ 0,
we got a contradiction. So w
n
(λ)
L
1
→
w
∗
(λ), and correspondingly w
n
(λ)
p
→ w
∗
(λ).
We use a continuous mapping theorem, that states
that if a function g : S → S
0
has the set of discon-
tinuity points D
g
such that P[X ∈ D
g
] = 0, then:
X
n
d
→ X ⇒ g(X
n
)
d
→ g(X). Using the fact that
g(w
n
) satisfies all conditions of this theorem we get
g(w
n
(λ))
p
→ g(w
∗
(λ)).
4 EXPERIMENTS
To analyze the properties of the optimization prob-
lems (14), (15), (16) and the proposed methods for
implementation of a hypernetwork (12), (13), we car-
ried out a toy experiment on Wine dataset (Blake,
1998) and experiments on the MNIST dataset of
handwritten digits (LeCun and Cortes, 2010) and the
CIFAR-10 dataset (Krizhevsky et al., ) of tiny im-
ages.
1
1
The source code is available at
https://github.com/intsystems/VarHyperNet
Deep Learning Model Selection With Parametric Complexity Control
69

Figure 2: The diagram of the hypernetwork training. All the given variables are marked in blue. All the variables to optimize
are marked in red.
For all the experiments we considered model clas-
sification accuracy as a quality criterion. We used
ADAM optimizer with a learning rate 5 · 10
−4
. As
logarithm of the variance for the variational distribu-
tion at initialization α
ps
we used −3.0; as the prior
variance we use α
pr
= 1.0. For each of the models we
carried out 5 runs, the results were averaged.
4.1 Preserving of Statistical Properties
For the first experiment, we used the Wine dataset,
consisting of 178 objects categorized into 3 classes.
Our main goal of this experiment was to demon-
strate that the hypernetworks can preserve the sta-
tistical properties of the approximated model. For
this experiment, we split the dataset into 142 objects
for the train and 36 objects for the test. We used
variational linear model (9) as a basic classification
model optimized directly without hypernetwork. We
used two types of hypernetworks to approximate this
model: variational linear hypernetwork (12) and vari-
ational piecewise-linear hypernetwork (13) with N=5
piecewise-linear regions.
We used optimization with minibatch size set to
1. We trained every model for 200 epochs. We used
Λ =∈ [10
2
;10
6
]. This set was designed to consider
models with different performances: from slightly
regularized models with accuracy ≈ 95% to overreg-
ularized models with accuracy ≈ 53%.
Since our goal was not to obtain the highest accu-
racy using hypernetwork, but to obtain performance
and parameter distribution similar to the linear model,
we tracked the difference in the accuracy between
the hypernetwork and directly optimized model and
the difference between their distribution. For this
difference we used the symmetrized KL-divergence:
¯
D
KL
(q
1
, q
2
) = D
KL
(q
1
, q
2
) + D
KL
(q
2
, q
1
), where q
1
is a variational distribution from hypernetwork, q
2
is
a variational distribution from the directly optimized
model. After the hypernetwork training, we also fine-
tuned the obtained models for one epoch with fixed
λ. We hypothesize that if the hypernetwork approx-
Figure 3: The results for the toy dataset for the directly opti-
mized model (9), linear hypernetwork (12) and piecewise-
linear hypernetwork (13) (P.-w. lin. hypernet). Each line
corresponds to the models performance obtained from hy-
pernetwork for different λ ∈ {10
2
, 10
3
, 10
4
, 10
5
, 10
6
}.
imates the statistical properties of the directly opti-
mized model well, after fine-tuning it will get accu-
racy closer to the directly optimized model, and its
¯
D
KL
will also decrease.
The results are shown in Figure 3. The gray
lines correspond to the accuracy values for different
λ ∈ {10
2
, 10
3
, 10
4
, 10
5
, 10
6
} obtained by directly op-
timized models. The x-axis corresponds to the loga-
rithm of
¯
D
KL
, therefore the perfect approximation of
the directly optimized model should be represented
by a line with points corresponding to the gray lines
on the y-axis and very low values on the x-axis. As
we can see, the linear hypernetwork poorly approxi-
mates the directly optimized model in comparison to a
more complex piecewise-linear hypernetwork that il-
lustrates the result of Theorem 2: the better model can
approximate the directly optimized model in terms
of optimization, the better it preserves its statisti-
cal properties. After fine-tuning the piecewise-linear
hypernetwork also improved its performance every-
where except λ = 10
6
, where it got a better
¯
D
KL
result,
but worse accuracy. Note that training the model (9)
from scratch with only one epoch gave us accuracy
from 0 to 61% for different λ. This shows that the hy-
pernetworks really contained parameter distribution
close to the parameter distribution of the directly op-
timized model, the fine-tuning step only increased its
performance, but not fully retrained the distribution
parameters. It also gives us a real scenario for the hy-
pernetwork usage: to store one set of parameters for
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
70

models with different complexity to tune them to the
desired complexity on demand.
4.2 MNIST and CIFAR-10:
Experimental Settings
The main goals of these experiments is to demonstrate
the availability of the hypernetworks to generate the
deep learning model parameters with the condition on
the complexity value λ. As we obtain the parameters
for the desired model we prune it to check how many
informative ones have each of the models depending
on the complexity value λ. This experiment allows
us to compare properties of models which parameters
were obtained from hypernetwork with properties of
directly optimized ones.
For both the experiment we trained our models for
50 epochs. The minibatch size is set to 256. The fol-
lowing implementations were compared:
(a) variational neural network (9);
(b) network with covariance reparametrization (10);
(c) base network (11);
(d) variational linear hypernetwork (12);
(e) network with covariance; reparametrization (10)
with linear hypernetwork (12);
(f) base network (11) (Lorraine and Duvenaud, 2018)
with linear hypernetwork (12);
(g) variational piecewise-linear hypernetwork (13),
N = 5;
(h) network with covariance reparametrization (10)
with piecewise-linear hypernetwork (13), N = 5;
(i) base network (11) (Lorraine and Duvenaud, 2018)
with piecewise-linear hypernetwork (13), N = 5.
We launched the neural network training for dif-
ferent values of the complexity value λ ∈ Λ. The pa-
rameters of each model were pruned after the opti-
mization using the g
var
criterion (17). For the imple-
mentations (c), (f), (i) we used the simplified criterion
g
simple
(18).
4.3 MNIST Experiment Results
For the MNIST dataset we used a neural network con-
sisting of two layers with 50 and 10 neurons, where
the second layer contains the softmax function. Pa-
rameters L, R for uniform distribution were set to −3
and 3 correspondingly.
Fig. 4a shows how the accuracy changes when
parameters were pruned for variational neural net-
work (9). The graph shows that the variational
method allows to remove ≈ 60% parameters for λ ∈
{10
−3
, 10
−2
, 10
−1
, 10
0
, 10
1
} and ≈ 80% parameters
for λ = 10
2
without significant loss of classification
accuracy. If we delete more parameters, the accuracy
for all values decreases. For large values of λ > 10
2
we obtain an oversimplified model. It contains a small
number of informative parameters. Thus, removing
of them for a given value of λ has little effect on the
classification accuracy. However, the initial accuracy
is low.
Fig. 4d shows how the classification accuracy
changes for the model with covariance reparametriza-
tion (10). Fig. 4g shows how the classification accu-
racy changes for the base network (11). The classifi-
cation accuracy of these two models hardly changed,
but the networks with the variational approach were
more robust to parameter deletion.
Fig. 4b, e, h shows how the classification accuracy
changes when parameters are removed by the speci-
fied method for models with the linear hypernetworks.
As can be seen from the graph, the average classi-
fication accuracy for all values of λ ∈ Λ, increased.
The deviation from the mean also increased for the
big percents of deleted parameters. At the same time,
for all values of λ ∈ Λ, a more stable models were
obtained: the classification accuracy less depends on
the removal of parameters.
Fig. 4c, f, i shows how the classification accuracy
changes when parameters were removed by the speci-
fied method for a model with the piecewise-linear ap-
proximation. Models with the piecewise-linear hy-
pernetwork showed similar behaviour to models that
were trained directly during pruning. Moreover, for
all values of λ ∈ Λ, a more stable models were ob-
tained. All results are presented in the Table 1 and on
Fig. 5, where results for all λ were averaged.
4.4 CIFAR-10 Experiment Results
For the CIFAR-10 dataset, we used CNN-based archi-
tecture with convolutional layers of size (3,48), (48,
96), (96, 192), (192, 256), ReLU activation, and feed-
forward layer in the end. Parameters L, R for uniform
distribution were set to −2 and 0 correspondingly.
It can be seen from the Fig. 6a that the varia-
tional method also allowed removing ≈ 60% parame-
ters for λ = 0.01, 0.1, in contrast to the base model
Fig. 6d, where the classification accuracy dropped
significantly when 40 percent of the parameters were
removed.
The network with covariance reparametriza-
tion (10) showed poor results for CIFAR-10. They
are presented on the Fig. 8. The poor results can be
mainly explained by the specialty of (5) for the mod-
Deep Learning Model Selection With Parametric Complexity Control
71
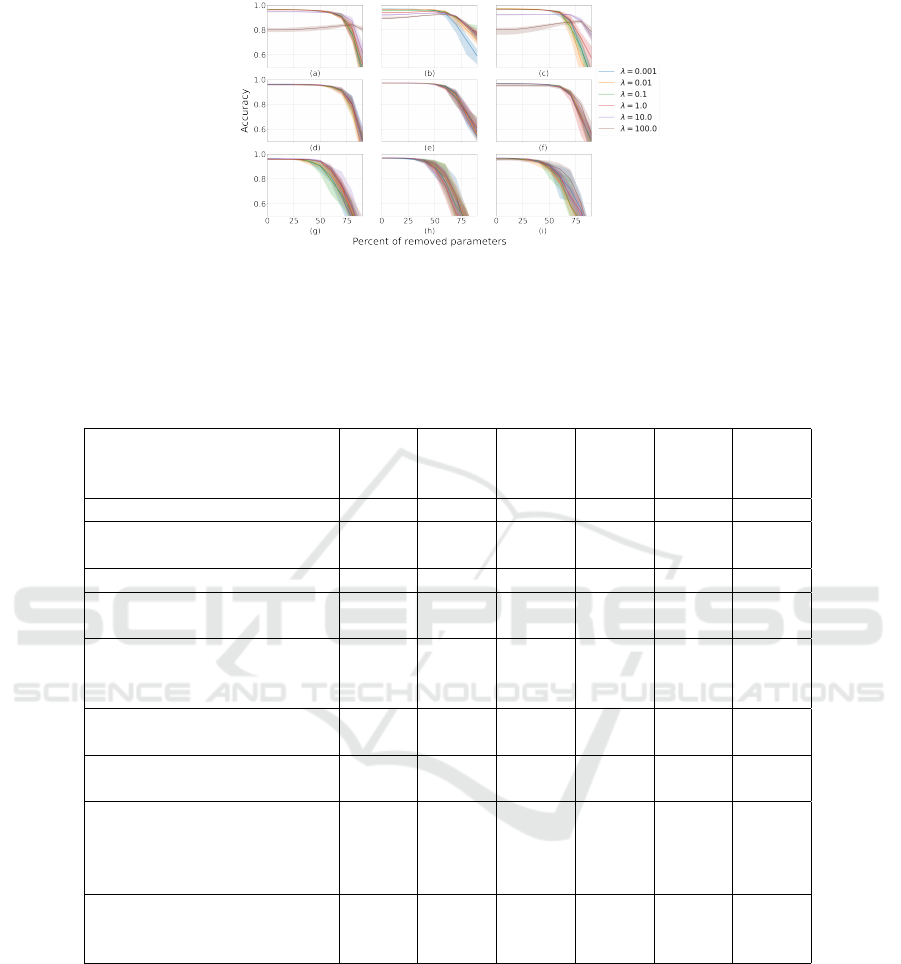
Figure 4: The dependence graph of the classification accuracy on the percentage of removed parameters on MNIST dataset
for: (a) variational neural network (9), (b) variational linear hypernetwork (12), (c) variational piecewise-linear hypernet-
work (13); (d) network with covariance reparametrization (10), (e) network with covariance reparametrization (10) with
linear hypernetwork (12), (f) network with covariance reparametrization (10) with piecewise-linear hypernetwork (13); (g)
base network (11), (h) base network (11) with linear hypernetwork (12), (i) base network (11) with piecewise-linear hyper-
network (13).
Table 1: Accuracy after pruning for MNIST dataset.
Implemenatation/
Percent of deleted
parameters
0% 10% 30% 50% 70% 90%
Variational network 0.9676 0.9678 0.9661 0.9602 0.9350 0.8280
Network with covariance
reparametrization
0.9667 0.9668 0.9665 0.9605 0.9388 0.6208
Base net 0.9662 0.9659 0.9630 0.9563 0.8613 0.4917
Variational linear
hypernetwork
0.9703 0.9700 0.9699 0.9652 0.9182 0.8393
Network with
covariance reparametrization
with linear hypernetwork
0.9752 0.9749 0.9743 0.9698 0.9198 0.7039
Base network
with linear hypernetwork
0.9723 0.9719 0.9687 0.9527 0.8119 0.3470
Variational piecewise-linear
hypernetwork
0.9736 0.9733 0.9712 0.9621 0.9280 0.8229
Network with
covariance reparametrization
with piecewise-linear
hypernetwork
0.9706 0.9707 0.9701 0.9630 0.9186 0.6545
Base network
with piecewise-linear
hypernetwork
0.9710 0.9699 0.9656 0.9474 0.8774 0.3807
els with a large number of parameters, which is also
confirmed by (8). We see that while the λ parameter
monotonously controls the influence of the prior dis-
tribution p(w|α
pr
) in (4), there is no such monotonic-
ity for (5), therefore the calibration of the parameter
for the such a model is a more difficult task and the
scale for the λ parameter can drastically differ for (5)
and (4),(6).
Fig. 6b, e shows graphs for variational (9) and
base (11) models with a linear hypernetwork (12).
As we can see, the classification accuracy improved
for all λ ∈ Λ and the model’s robustness to parameter
deletion increased.
The same results(Fig. 6c,f) were reached with
piece-wise implementation of hypernetwork (13). In
addition, the piece-wise hypernetwork better approx-
imated the behaviour of directly trained models.
All the results for CIFAR-10 dataset are presented
in Table 2 and Fig. 7. The experiments show that
the variational (4) and the base (6) loss functions
give great and interpreted results. Despite the good
result on MNIST dataset, function with covariance
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
72
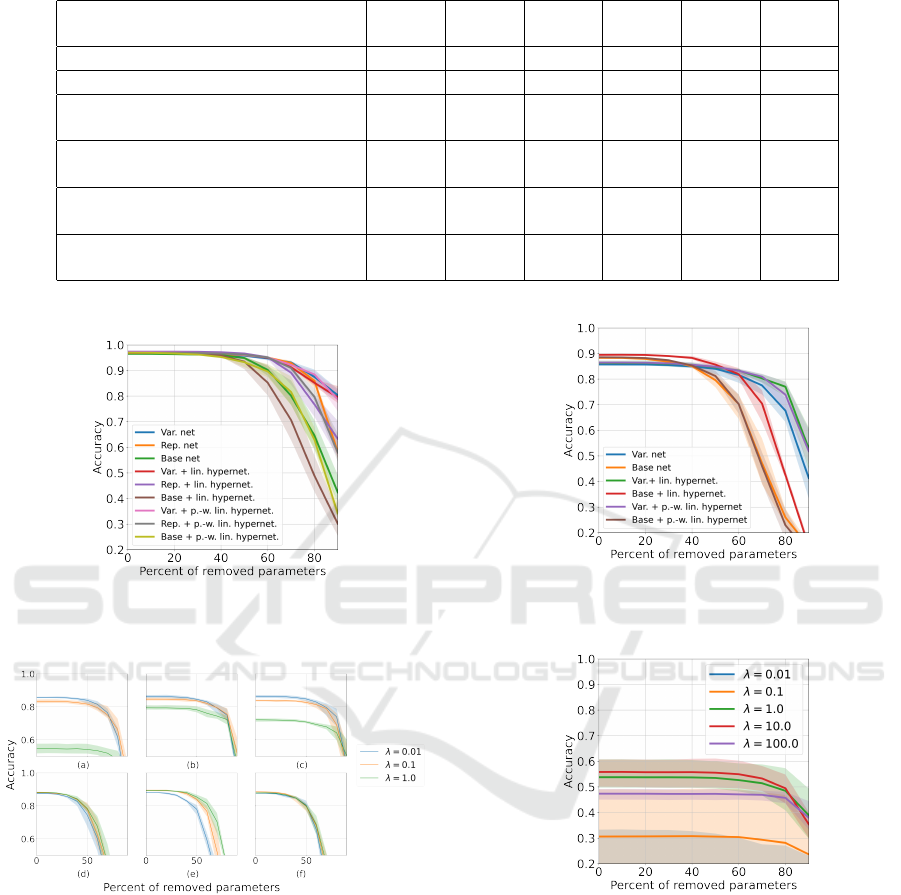
Table 2: Accuracy after pruning for CIFAR-10 dataset.
Implemenatation/
Percent of deleted parameters
0% 10% 30% 50% 70% 90%
Variational network 0.8612 0.8614 0.8615 0.8508 0.8048 0.4577
Base net 0.8852 0.8839 0.8728 0.8191 0.5683 0.1582
Variational linear
hypernetwork
0.8719 0.8719 0.8691 0.8520 0.8189 0.6107
Base network
with linear hypernetwork
0.8984 0.8984 0.8919 0.8683 0.7565 0.1656
Variational piecewise-linear
hypernetwork
0.8720 0.8715 0.8703 0.8561 0.8207 0.5173
Base network
with piecewise-linear hypernetwork
0.8879 0.8868 0.8752 0.8321 0.5146 0.1354
Figure 5: The dependence graph of the classification accu-
racy on the percentage of removed parameters for all mod-
els on MNIST dataset.
Figure 6: The dependence graph of the classification accu-
racy on the percentage of removed parameters on CIFAR-
10 dataset for: (a) variational neural network (9), (b) vari-
ational linear hypernetwork (12), (c) variational piecewise-
linear hypernetwork (13); (d) base network (11), (e) base
network (11) with linear hypernetwork (12), (f) base net-
work (11) with piecewise-linear hypernetwork (13).
reparametrization (5) requires more accurate tuning
for different models and data, that is why it is not
suitable in many cases. In addition, experiments show
that we can obtain a hypernetwork that precisely ap-
proximates original network. This result supports the
Theorem 2.
Figure 7: The dependence graph of the classification accu-
racy on the percentage of removed parameters for all mod-
els on CIFAR-10 dataset.
Figure 8: The dependence graph of the classification ac-
curacy on the percentage of removed parameters for net-
work with covariance reparametrization (10) on CIFAR-10
dataset.
5 CONCLUSION
This paper investigated the problem of deep learning
model complexity control at the inference. To control
the model complexity, we introduced probabilistic as-
sumptions about the distribution of parameters of the
deep learning model. The paper analyzed three forms
of regularization to control the model parameter dis-
Deep Learning Model Selection With Parametric Complexity Control
73

tribution. It generalized the model evidence as a crite-
rion that depends on the required model complexity.
The proposed method was based on the representa-
tion of deep learning model parameters in the form
of hypernetwork output. We analyzed this method in
the computational experiments on the Wine, MNIST
and CIFAR-10 datasets. The results showed that mod-
els with hypernetworks have the same properties as
models trained directly but use less computational re-
sources. Furthermore, these models are more sta-
ble in terms of deleting parameters and can be eas-
ily adjust to computational restrictions. In future, we
are going to research other variants of hypernetwork
implementation and advanced methods of controlling
model’s complexity. Besides, it is still a question how
to choose the complexity parameter λ for new dataset.
We plan to investigate it in future research.
REFERENCES
Atanov, A., Ashukha, A., Struminsky, K., Vetrov, D., and
Welling, M. (2019). The deep weight prior. In Inter-
national Conference on Learning Representations.
Bakhteev, O. and Strijov, V. (2018). Deep learning model
selection of suboptimal complexity. Automation and
Remote Control, 79:1474–1488.
Bishop, C. M. (2006). Pattern Recognition and Machine
Learning. Springer.
Blake, C. (1998). Uci repository of machine learn-
ing databases. http://www. ics. uci. edu/˜
mlearn/MLRepository. html.
Graves, A. (2011). Practical variational inference for neural
networks. In Shawe-Taylor, J., Zemel, R. S., Bartlett,
P. L., Pereira, F. C. N., and Weinberger, K. Q., editors,
Advances in Neural Information Processing Systems
24: 25th Annual Conference on Neural Information
Processing Systems 2011. Proceedings of a meeting
held 12-14 December 2011, Granada, Spain, pages
2348–2356.
Ha, D., Dai, A. M., and Le, Q. V. (2016). Hypernetworks.
CoRR, abs/1609.09106.
Han, S., Pool, J., Tran, J., and Dally, W. (2015). Learning
both weights and connections for efficient neural net-
work. In Cortes, C., Lawrence, N., Lee, D., Sugiyama,
M., and Garnett, R., editors, Advances in Neural Infor-
mation Processing Systems, volume 28. Curran Asso-
ciates, Inc.
Jiang, T., Yang, X., Shi, Y., and Wang, H. (2019). Layer-
wise deep neural network pruning via iteratively
reweighted optimization. In ICASSP 2019 - 2019
IEEE International Conference on Acoustics, Speech
and Signal Processing (ICASSP), pages 5606–5610.
Krizhevsky, A., Nair, V., and Hinton, G. (-). Cifar-10 (cana-
dian institute for advanced research).
LeCun, Y. and Cortes, C. (2010). MNIST handwritten digit
database. http://yann.lecun.com/exdb/mnist/.
Lorraine, J. and Duvenaud, D. (2018). Stochastic hyperpa-
rameter optimization through hypernetworks. CoRR,
abs/1802.09419.
Louizos, C., Ullrich, K., and Welling, M. (2017). Bayesian
compression for deep learning. In Guyon, I., Luxburg,
U. V., Bengio, S., Wallach, H., Fergus, R., Vish-
wanathan, S., and Garnett, R., editors, Advances in
Neural Information Processing Systems, volume 30.
Curran Associates, Inc.
Zhmoginov, A., Sandler, M., and Vladymyrov, M. (2022).
Hypertransformer: Model generation for supervised
and semi-supervised few-shot learning. arXiv preprint
arXiv:2201.04182.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
74
