
Multi-Agent Pathfinding on Large Maps Using Graph Pruning:
This Way or That Way?
Ji
ˇ
r
´
ı
ˇ
Svancara
1 a
, Philipp Obermeier
2 b
, Matej Hus
´
ar
1
, Roman Bart
´
ak
1 c
and Torsten Schaub
2 d
1
Charles University, Prague, Czech Republic
2
University of Potsdam and Potassco Solutions, Potsdam, Germany
Keywords:
Multi-Agent Pathfinding, Answer Set Programming, Subgraph, Shortest Path.
Abstract:
Multi-agent pathfinding is the task of navigating a set of agents in a shared environment from their start
locations to their desired goal locations without collisions. Solving this problem optimally is a hard task and
various algorithms have been devised. The algorithms can generally be split into two categories, search- and
reduction-based ones. It is known that reduction-based algorithms struggle with large instances in terms of
the size of the environment. A recent study tried to mitigate this drawback by pruning some vertices of the
environment map. The pruning is done based on the vicinity to a shortest path of an agent. In this paper, we
study the effect of choosing such shortest paths. We provide several approaches to choosing the paths and we
perform an experimental study to see the effect on the runtime.
1 INTRODUCTION
We study the problem of Multi-agent pathfinding
(MAPF). The task is to navigate a set of agents in
a shared environment (map) from starting locations
to the desired goal locations such that there are no
collisions (Silver, 2005). This problem has numerous
practical applications in robotics, logistics, digital en-
tertainment, automatic warehousing and more, and it
has attracted significant focus from various research
communities in recent years (Li et al., 2020; Surynek,
2019; Nguyen et al., 2017; Gebser et al., 2018b).
Optimal MAPF solvers can generally be split into
two categories, search- and reduction-based ones.
The former search over possible locations or conflicts
among agents, while the latter reduce the problem
to other formalisms, such as Answer Set Program-
ming (ASP) (Gebser et al., 2018a). While it is not
always the case, it is generally established that each
of the approaches dominates on different types of in-
stances (G
´
omez et al., 2021; Svancara and Bart
´
ak,
2019). The search-based solvers are easily able to
find solutions on large sparsely populated maps while
having trouble dealing with small densely populated
a
https://orcid.org/0000-0002-6275-6773
b
https://orcid.org/0000-0001-6346-4855
c
https://orcid.org/0000-0002-6717-8175
d
https://orcid.org/0000-0002-7456-041X
maps. On the other hand, the reduction-based solvers
are able to deal with the small densely populated maps
but are unable to find a solution for large maps even
with a small number of agents.
Since reduction-based solvers have trouble solv-
ing large instances, a recent study (Hus
´
ar et al., 2022)
proposed techniques to remove vertices from the map
that are most likely not needed to solve the instance.
The pruning is done based on a random shortest path
for each agent. Only vertices around the selected path
are considered and other vertices are removed, creat-
ing a much simpler problem. In this paper, we extend
the original study by examining the behavior of the
technique by using more than just one shortest path
for each agent. First, we describe the four pruning
strategies from the original study, and then we intro-
duce four new ones to select paths for each agent.
2 DEFINITIONS
A MAPF instance M is a pair (G,A), where G is a
graph G = (V, E) and A is a set of agents. An agent
a
i
∈ A is a pair a
i
= (s
i
, g
i
), where s
i
∈ V is the start
location and g
i
∈ V is the goal location of agent a
i
.
Our task is to find a valid plan π
i
for each agent
a
i
∈ A being a valid path from s
i
to g
i
. We use
π
i
(t) = v to denote that agent a
i
is located at vertex v
Švancara, J., Obermeier, P., Husár, M., Barták, R. and Schaub, T.
Multi-Agent Pathfinding on Large Maps Using Graph Pruning: This Way or That Way?.
DOI: 10.5220/0011625100003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 199-206
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
199

at timestep t. Time is discrete and at each timestep, an
agent can either wait at its current location or move to
a neighboring location. Furthermore, we require that
each pair of plans π
i
and π
j
, i 6= j is collision-free.
Based on MAPF terminology (Stern et al., 2019),
there are five types of collisions. Here, we forbid
edge, vertex, and swap conflicts while allowing follow
and cycle conflicts since the two latter prevent agents
from occupying the same location. Note, however,
that all of our methods work in any setting.
We are interested in makespan optimal solutions.
Makespan (or horizon) refers to the length of a plan.
A plan ends once all of the agents are at the goal lo-
cation at the same time. This means that the length of
the plan |π
i
| is the same for all of the agents. Another
common cost function is sum of costs (Sharon et al.,
2011). Note that finding an optimal solution for either
of the cost functions is an NP-hard problem (Ratner
and Warmuth, 1990; Yu and LaValle, 2013).
3 ASP ENCODING
We use an ASP encoding
1
for MAPF due to (Gebser
et al., 2018a). The encoding assumes a grid graph G
and plans agents in parallel within a makespan while
avoiding conflicts. Specifically, the plan’s timesteps
are bound by the makespan H in Line 1. Line 3 gives
the four cardinal directions, used in Line 4 to repre-
sent all transitions on the grid with its x,y-coordinates
stated by predicate position/1. Possible movement
actions, at most one per agent and timestep, are gen-
erated by Line 8. Related preconditions and posi-
tional changes are described in Lines 10-12: The posi-
tions of all agents are described by position(R,C,T
) stating that agent R is at x,y-coordinates C at time
T. For an agent R sitting idle at time T, the frame ax-
iom in Lines 14-15 propagates its unchanged position.
Swapping conflicts are prevented by Lines 17-19, and
both edge and vertex conflicts by Line 21.
1 time ( 1. . h ori zon ) .
3 dire cti on (( X,Y ) ) :- X = - 1..1 , Y = -1..1
, | X + Y |=1.
4 nex tto (( X,Y ) , ( D X,DY ) ,(X ’ ,Y ’) ) :-
5 dir ect ion (( DX, DY )), pos iti on ((
X, Y ) ) , p osi tio n (( X ’ ,Y ’) ),
6 ( X,Y ) =( X ’ - DX,Y ’-DY ) , ( X ’,Y ’) =( X +
DX,Y + DY ) .
8 { m ov e ( R,D,T ) : d ire cti on ( D ) } 1 : -
isR obo t ( R ) , time ( T).
10 posit io n ( R,C, T ) :-
1
https://github.com/potassco/asprilo-encodings/blob/
master/m/action-M.lp
11 m ove ( R, D , T ) , pos i ti o n ( R,C ’,T -1) ,
nex t to (C ’ ,D , C ) .
12 :- mo v e ( R,D,T ) , pos it i on ( R,C ,T -1) ,
no t ne xtt o ( C ,D, _ ) .
14 po si t io n ( R,C, T ) :-
15 pos it i on ( R,C,T -1) , n ot move (
R,_, T ) , i s Ro b ot ( R ) , t i m e ( T ).
17 mov eto (C ’ ,C,T ) : -
18 next to (C ’ , D ,C ) , pos i ti o n ( R,C ’,T
-1 ) , mov e ( R ,D,T ) .
19 :- move t o ( C ’ ,C , T ) , m ove to ( C,C ’,T ) ,
C < C ’.
21 :- { p os i ti on ( R ,C,T ) : isR o bo t ( R ) }
> 1 , po s it i on ( C) , t i me ( T ) .
Listing 1: Action theory for agent movements.
Further, we augment the action theory encoding with
the goal condition in Listing 2 to enforce that every
agent R has reached its goal coordinates C, stated by
goal(R,C), at the time H.
1 :- n ot po s it io n ( R, C, ho ri z o n ) , go a l (
R, C ) .
Listing 2: Goal condition for agents and assigned nodes.
There are two common techniques to speed up
computation. First, using a lower bound for the
makespan. A simple lower bound is to compute for
each agent a
i
the shortest path from its start loca-
tion s
i
to its goal location g
i
. The lower bound for
H is then the longest of these shortest paths. Another
enhancement is to preprocess the variables represent-
ing agent locations. These variables correspond to an
agent being present at some location at a time. How-
ever, for some locations, the specific agent cannot be
present at the specific times. Specifically, for agent
a
i
, if vertex v is distance d away from start location
s
i
, we know that the agent a
i
cannot be at vertex v at
times 0, . . . , (d −1). Similarly, if vertex v is distance d
away from goal location g
i
, agent a
i
cannot be present
at vertex v at times H − d + 1, . . . , H.
4 THE SUB-GRAPH METHOD
Both of the above improvements maintain complete-
ness and optimality. However, there are situations,
where too many possibilities for an agent’s location
remain, which may overwhelm the underlying solver.
The motivation of (Hus
´
ar et al., 2022) can be seen in
Figure 1a. The agent is placed on a 4-connected grid
going from one corner to the diagonally opposite cor-
ner. With just one agent and no obstacles, there are
2(N−1)
N−1
possible shortest paths on an N × N grid. As
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
200
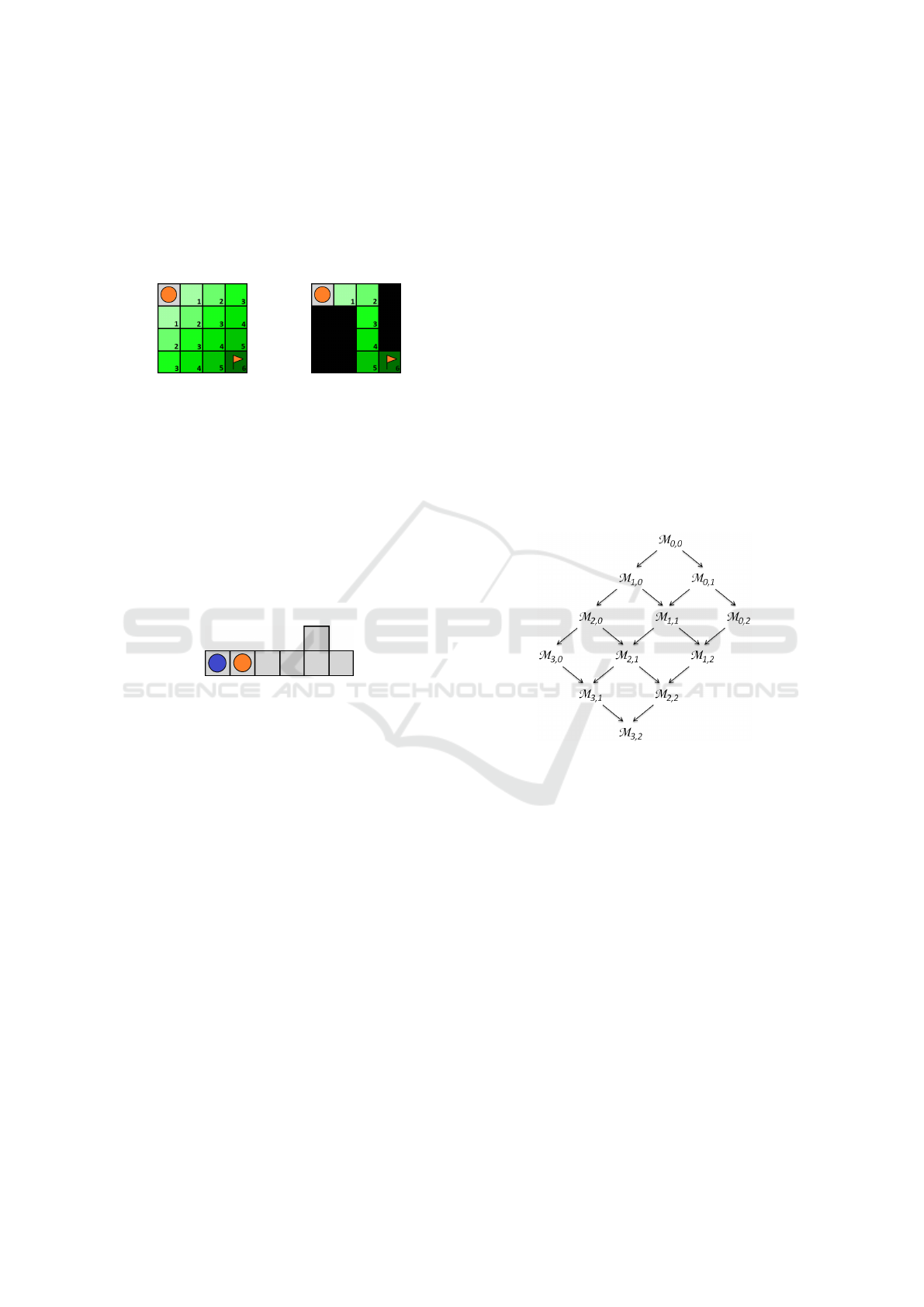
shown in the figure, preprocessing finds out at what
timesteps the agent can be located at which vertices.
However, the number of choices is still too large for
the solver. The idea is to pick just one of the shortest
paths and to treat the other vertices as impassable ob-
stacles. So, for these vertices, no variables enter the
solver. This pruning is shown in Figure 1b.
(a)
(b)
Figure 1: An agent moving on a grid map from a corner to
the opposite one. The numbers represent at what timesteps
the agent can reach the given vertex.
Of course, this pruning does not maintain com-
pleteness in general. A simple counterexample is
given in Figure 2. The two agents want to swap their
location (ie. their goal location is identical with the
starting location of the other agent). To do this, the
only solution is for both of them to travel to the right
and use the top vertex to switch their position. To mit-
igate these instances, several strategies are proposed
to change which vertices are pruned.
Figure 2: An instance with two agents that want to swap
their positions.
4.1 Solving Strategies
Let SP
i
be the set of vertices on a chosen short-
est path for agent a
i
∈ A (ie. a single shortest path
from s
i
to g
i
). The length of the path is |SP
i
|. The
union of vertices on the shortest paths of all agents is
SP
A
=
S
a
i
∈A
SP
i
. Note that we consider a single short-
est path for each agent. If multiple shortest paths exist
for an agent, one is chosen at random. Given this, the
lower bound on the makespan of an instance (G, A)
is LB
mks
(G, A) = max
a
i
∈A
|SP
i
|. For short, we refer to
such lower bound just by LB.
A k-restricted graph Gres
SP
A
k
is a subgraph of G
containing only vertices SP
A
and vertices at most dis-
tance k away from some vertex in SP
A
. Since we
always fix SP
A
, we write for simplicity only Gres
k
.
Note that Gres
k
⊆ Gres
k
0
for k ≤ k
0
.
We define a makespan-restricted MAPF instance
as M = (G, A, H). A makespan optimal solution is
found by iteratively increasing the makespan. The
(k,m)-relaxation of M is the makespan-restricted
MAPF instance
M
k,m
= (Gres
k
, A, LB +m)
This relaxation considers only Gres
k
instead of the
whole graph G. We find a solution with ex-
tra makespan m – extra over the lower bound on
makespan. Also note that Gres
k
is constructed such
that LB
mks
(G, A) = LB
mks
(Gres
k
, A) for any k, there-
fore, we do not need to change the notation of LB.
We build a partial order ≺
relax
over the (k,m)-
relaxations M
k,m
such that
M
k,m
≺
relax
M
k
0
,m
0
if k ≤ k
0
, m ≤ m
0
and k +m < k
0
+ m
0
There is an upper bound on k such that for some
k
max
we have Gres
k
max
= G. There is also an upper
bound on the makespan for a given MAPF instance
of O(V
3
) (Kornhauser et al., 1984). For example, as-
sume that k
max
= 3 and m
max
= 2. Then, Figure 3
depicts the space of possible relaxations induced by
≺
relax
. Note that the partial ordering forms a lattice.
Figure 3: Instance relaxations for k
max
= 3, m
max
= 2.
The generic algorithm to solve MAPF using the
relaxed instances is as follows. First, we build an ini-
tial (k,m)-relaxation and we iteratively change k and
m until the instance is solvable. This corresponds to a
traversal of the lattice formed by the partial ordering
≺
relax
. Note that the shortest path for each agent is
fixed for all of the iterations.
Next, we identify four reasonable traversals.
Baseline Strategy. The classical approach to
solving MAPF makespan optimally can be expressed
in the relaxed instances as follows. We start with an
initial candidate of k
max
(ie. the whole graph G) and
m = 0. If the relaxed instance is unsolvable, only the
additional makespan m is increased to m +1. We shall
refer to this strategy as baseline or B for short.
Proposition 1. If a MAPF instance M has a solution,
baseline strategy finds an optimal solution.
Makespan-add Strategy. The first smarter solu-
tion is to keep only the vertices on the shortest paths
Multi-Agent Pathfinding on Large Maps Using Graph Pruning: This Way or That Way?
201

and the immediately adjacent ones. The initial candi-
date is k = 1 and m = 0. Otherwise, the strategy is the
same as the baseline strategy: if the relaxed instance
is unsolvable, we increase m to m + 1 while k is never
changed. We refer to this strategy as makespan-add
or M for short.
Proposition 2. (Hus
´
ar et al., 2022) The makespan-
add strategy is both suboptimal and incomplete.
On the other hand, in most cases, this simple strat-
egy can find a solution, and due to the great reduction
of vertices of the graph, the solution may be found
quickly. We choose to start with k = 1 rather than
k = 0 to increase the probability for a solution to exist
while keeping the number of vertices to a minimum.
Prune-and-Cut Strategy. The previous strategies
either use unnecessary large restricted graph or do not
guarantee to find a solution. Strategy prune-and-cut
(P for short) guarantees both completeness and op-
timality. We start with initial candidate k = 0 and
m = 0. In case the relaxed instance is unsolvable,
we cannot be sure if the reason is the restriction on
k or on m. However, since we do not want to over-
estimate m, we first need to increase k potentially up
to k
max
. Once a restricted instance M
k
max
,m
is unsolv-
able, we are sure that m needs to be increased. We
can optimistically assume that the whole Gres
k
max
is
not needed and we restrict the graph back to k = 0
producing M
0,m+1
.
Proposition 3. (Hus
´
ar et al., 2022) If a MAPF in-
stance M has a solution, prune-and-cut strategy finds
an optimal solution.
Combined Strategy. The drawback of the prune-
and-cut strategy is that in the case the makespan needs
to be increased, we first increase k up to k
max
before
increasing m. To mitigate this problem, we present the
combined strategy (C for short). The initial candidate
is again k = 0 and m = 0. If the relaxed instance is
unsolvable, we increase both k = k + 1 and m = m +
1 at the same time. This way, we save solver calls
because we do not need to explore all of the possible
reductions in the k direction. On the other hand, this
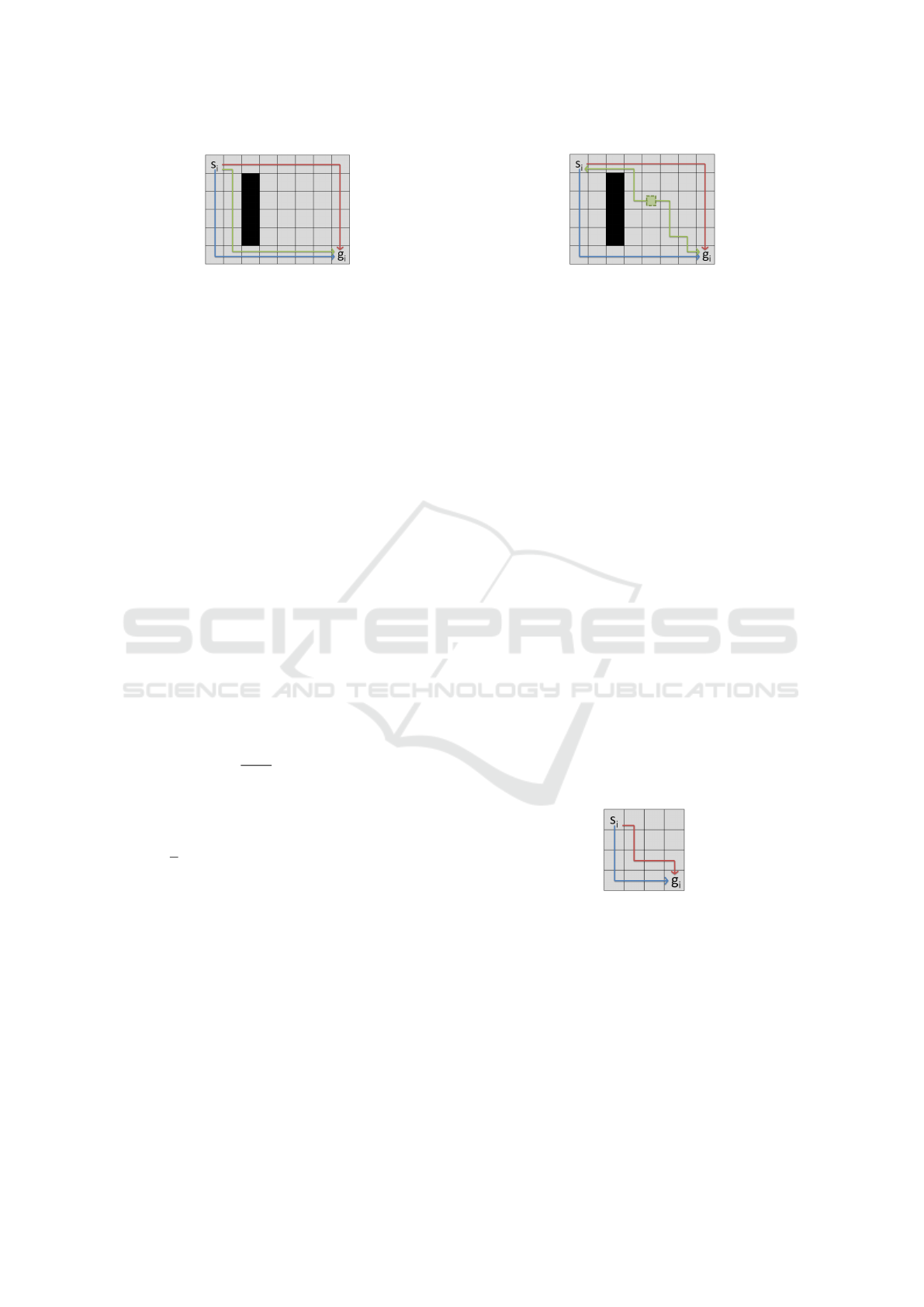
strategy is no longer optimal. Figure 4 with blue agent
choosing the blue path is a counterexample.
Proposition 4. (Hus
´
ar et al., 2022) If a MAPF in-
stance M has a solution, combined strategy is guar-
anteed to find a solution (completeness) but not nec-
essarily an optimal one.
Figure 4: An example instance where the blue agent has
two choices of the shortest path. If the blue path is chosen,
the proposed strategies perform worse.
5 CHOOSING THE SHORTEST
PATHS
The described strategies (except for baseline) may
suffer from a poor choice of the initial shortest path
for each agent. See the example in Figure 4. The blue
agent has two possible shortest paths. If the algorithm
by random chooses the blue path, none of the sophis-
ticated strategies can solve the relaxed instance in the
first solver call. Makespan-add would find a subop-
timal solution with makespan LB + 2, prune-and-cut
would require to increase k two times to be able to use
the black path, and combined strategy would also find
a suboptimal solution with makespan LB + 2.
This issue can be mitigated by including all of the
vertices on all of the possible shortest paths into the
Gres
k
, however, this goes against the logic of the mo-
tivational example in Figure 1. Hence, we try to iden-
tify approaches to choose more than just one of the
shortest paths to improve the strategies.
Since the choice of the shortest paths acts as a
preprocessing stage, we aim for fast heuristic tech-
niques. For this reason, each agent is treated individ-
ually, without considering the interference with short-
est paths of the other agents. We propose the fol-
lowing four sensible approaches to pick which ver-
tices should be included in the initial restricted graph
Gres
0
. All of the described strategies, then, work the
same as was described in the previous section.
Single Path. First, we use the same approach as
in the original study (Hus
´
ar et al., 2022). For each
agent, we choose a single random shortest path. The
restricted graph Gres
0
is induced by SP
A
=
S
a
i
∈A
SP
i
.
Recall that SP
i
are the vertices on the shortest path for
agent a
i
. We refer to this approach as single-path or
SP for short.
All Paths. The second approach is on the other
end of the spectrum. Instead of just one shortest
path, we consider all vertices on all shortest paths
of a given agent. Formally, we write SP
All
i
= {v ∈
V | dist(s
i
, v) + dist(v, g
i
) = |SP
i
|} meaning all ver-
tices whose distance from start location plus the dis-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
202
(a) The greedy approach starting at s
i
chooses an undesir-
able green path due to the fact that it tries to make the path
most divers (to the previously planned blue and red paths)
from the start without the knowledge of the rest of the map.
(b) By choosing a different starting location, the greedy al-
gorithm finds a better green path than in Figure 5a. In this
example there are multiple possible starting locations, each
equally good. If this happens, one is chosen at random.
Figure 5: An example showing the drawback of finding the shortest path greedily from the the starting location s
i
. This issue
can be fixed by choosing different starting vertex. The green path is chosen after red and blue paths.
tance to goal location equals the distance of a short-
est path. The restricted graph Gres
0
is induced by
SP
All
A
=
S
a
i
∈A
SP
All
i
.
Note that while there may be many different short-
est paths as discussed in Figure 1, the number of ver-
tices on those paths is much smaller. For the creation
of the restricted graph, we are interested only in the
vertices, the specific path is decided by the underlying
solver. Finding all of the vertices on all of the shortest
paths can be done by performing a breath-first search
from the start and goal of the agent and checking for
the condition in the definition of SP
All
i
. We refer to
this approach as all-paths or AP for short.
Random Paths. Instead of considering one or all
possible paths, we aim to pick vertices that are part
of just some subset of all paths. First, we need to
set a number of paths to consider. Note that based
on the given map and the start and goal locations of
each agent, there is a wide variety of the number of
shortest paths. Instead of selecting a magic constant,
we propose to find
|SP
All
i
|
|SP
i
|
shortest paths for agent a
i
and consider the union of vertices on those. If there is
a unique shortest path, by using the formula we cor-
rectly consider just the one shortest path, while on an
empty N × N grid (such as in Figure 1), we are con-
sidering
N
2
paths.
The next proposed approach picks the specified
number of shortest paths randomly. We do this by
a random walk starting at s
i
moving only over ver-
tices from SP
All
i
in the correct direction. We know
the correct direction based on the distance from s
i
and g
i
computed by BFS (we need to perform the two
BFS in order to determine SP
All
i
). The random walk
is biased to prefer vertices that are not yet used for
a given agent. By doing this for all agents we get
SP
Rand
A
=
S
a
i
∈A
SP
Rand
i
. We refer to this approach as
random-paths or RP for short.
Distant Paths. The drawback of random-paths it
that there is no guarantee on the properties of the cho-
sen shortest paths. The idea of using more than one
shortest path is to allow the underlying solver to navi-
gate the agent through a different region of the map to
avoid possible conflicts. However, by choosing ran-
dom paths, we may produce paths that share many
vertices or are in close proximity to each other, both
of which are undesirable.
We want to find diverse and distant paths. There
is a polynomial-time algorithm to find diverse short-
est paths (Hanaka et al., 2021). In this case, diverse
means paths that share the least amount of edges (or
vertices). By using this algorithm, it may be the case
that we find paths as shown in Figure 6. On the other
hand, there is also a research dealing with finding the
most diverse near-shortest paths (H
¨
acker et al., 2021),
in which case the paths are supposed to be the greatest
distance from each other. Note that both studies use
the term distant with different meaning. In our pa-
per, we are using diverse for different paths and dis-
tant for path with distance between them. The down-
side of the the second referred study is that the paths
found are not optimal and also the problem itself is
NP-Hard, which is not a desirable trait for a prepro-
cessing function.
Figure 6: Possible shortest paths from s
i
to g
i
found by the
diverse shortest paths algorithm (Hanaka et al., 2021).
Our proposed approach is heuristic. Again, we
build the paths over the vertices from SP
All
i
, gradu-
ally creating SP
Dist
i
. At each step, we try to add a new
vertex to the currently build path and if there are mul-
tiple choices, we pick one that maximizes the minimal
distance to all of the vertices currently in SP
Dist
i
(see
Figure 7 for an example). Since this is just a heuris-
tic, there are examples that make us choose an unde-
sirable path because the approach greedily chose the
next vertex on the path without knowledge of the rest
Multi-Agent Pathfinding on Large Maps Using Graph Pruning: This Way or That Way?
203
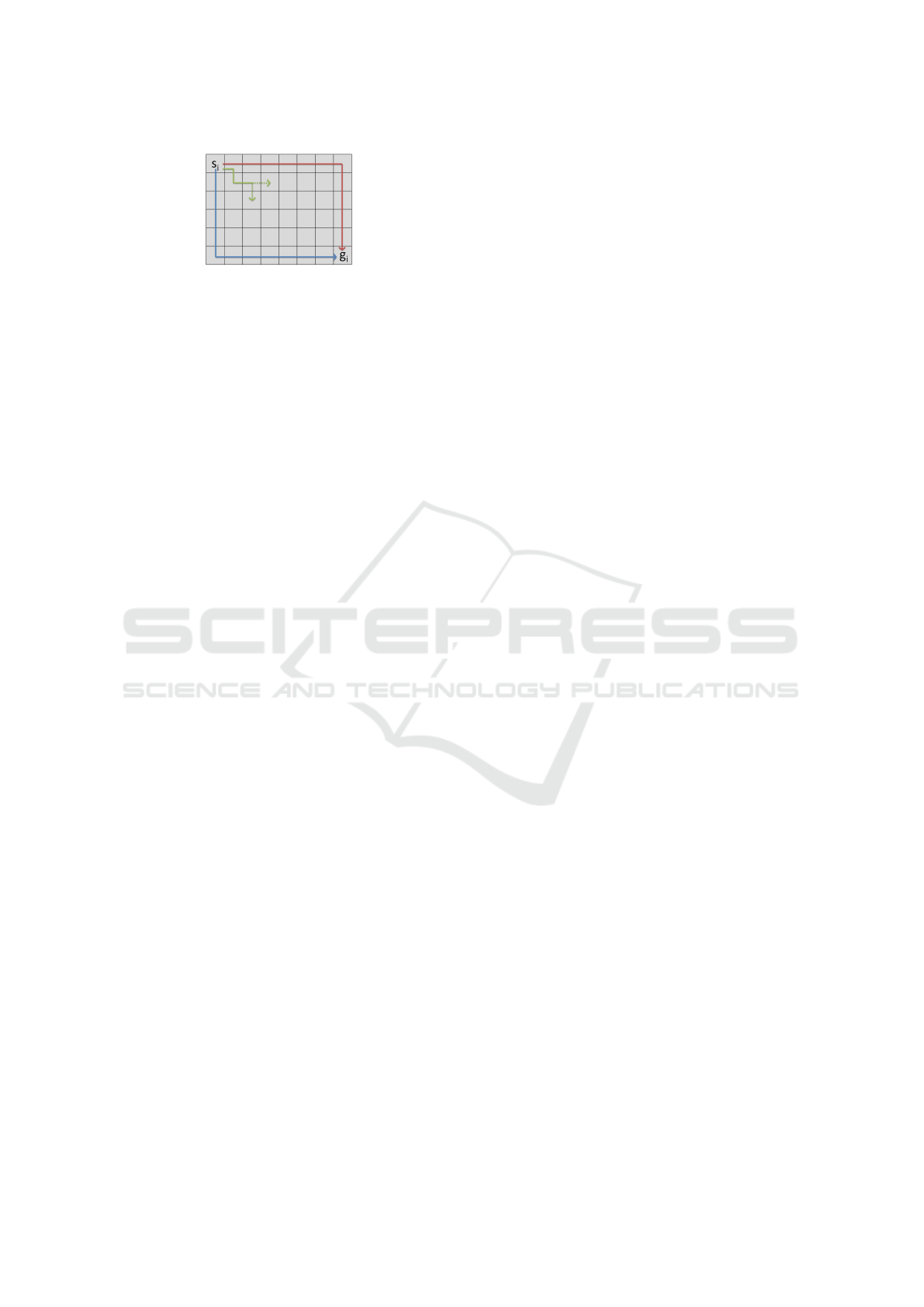
Figure 7: The gradual building of SP
Dist
i
from s
i
to g
i
by
a greedy approach. The currently build green path has a
choice. Moving downward will be chosen since it maxi-
mizes the distance to the already chosen paths.
of the map. Such example can be seen in Figure 5a.
To mitigate this, we start to build the path from a dif-
ferent vertex from the set SP
All
i
rather than from s
i
.
The first path is build the same as SP
i
, for the latter
paths, we choose a vertex v such that it maximizes
the minimal distance to all of the vertices currently in
SP
Dist
i
. This way we need to build the path both from
v to s
i
and from v to g
i
. Using this approach we find
a much more desirable path for the example in Fig-
ure 5a with the result shown in Figure 5b. We refer to
this approach as distant-paths or DP for short.
6 EXPERIMENTAL EVALUATION
To test and compare the proposed strategies in com-
bination with approaches to creating the restricted
graph, we set up experiments. The full implemen-
tation and results are available at https://github.com/
potassco/mapf-subgraph-system. For the ASP-based
solver, we used the grounding-and-solving system
clingo (Gebser et al., 2019; Kaminski et al., 2020)
version 5.5.2. We ran the experiments on an Intel
Xeon E5-2650v4 under Debian GNU/Linux 9, with
each instance limited to 300s processing time and 28
GB of memory.
The instances used in our experiments are based
on commonly used benchmark instances available on-
line (Stern et al., 2019). We chose different sizes of
maps – small (32 by 32), medium (64 by 64), and
large (128 by 128) and different structures of the im-
passable obstacles in the map with the following types
– empty, maze, random, and room.
For the placement of the agents (called scenarios),
we used the available scenarios. Furthermore, we cre-
ated new scenarios for each map such that the distance
from start to goal of each agent is similar and the paths
of the agents need to cross more often. We did this be-
cause the makespan optimal solution for the random
scenarios rarely differs from the lower bound. The
behavior of the strategies may be gravely affected by
many conflicts and the need to increase the makespan.
The intended way to use the benchmark set is to
create an instance of MAPF from a map and a num-
ber of agents from a scenario. If the instance is solved
in the given time limit, an additional agent from the
same scenario is added and thus a new MAPF in-
stance is produced. Once the instance cannot be
solved in the time limit, it is reasoned that increasing
further the number of agents cannot make the instance
solvable. We are aware that using a reduction-based
solver, this may not always hold. Also, some of the
strategies may benefit from additional agents which
change the restricted graph. However, these cases are
extremely rare and therefore, we decided to use the
benchmark as intended.
Table 1 shows the results for all of the strategies
and approaches to creating the restricted graph. Note
that the baseline strategy B considers the whole map,
therefore we do not use any of the four approaches.
The strategies B and P are optimal, therefore, we
consider them separately opposed to the suboptimal
strategies C and M. The best result for both opti-
mal and suboptimal strategies on each line is high-
lighted. We present the results divided by the type
of the map regardless of the size. This representation
shows nicely the difference between the approaches
to creating the restricted graph. For more detailed
results, we include much more detailed tables in the
supplementary materials.
First, we examine the average number of vertices
used by each approach. In the table, the number indi-
cates the ratio of used vertices to the total number of
vertices. Since B always uses the whole map, the ratio
is 1. We can see that SP uses the least number of ver-
tices in all cases, on the other hand, AP uses the most
and DP and RP use about the same. This result is
not surprising since it is based on the number of paths
used by each approach. However, we can also see that
the difference is much bigger on opened maps (such
as empty) and much smaller on very restrictive maps
(such as maze), meaning that in the latter case there
are not many different shortest paths for the agents to
choose from. There is also a clear order in terms of
the strategies with P using the least, C using more,
and M using even more vertices on average.
Examining the number of solved instances (ratio
of solved to all instances – 2544 for empty, 1956 for
maze, 2418 for random, 2357 for room), we see that
the most successful combination is P + SP for the op-
timal setting and C + SP for the suboptimal. Again,
the difference across the approaches to choosing the
shortest paths is least prominent on maze maps, how-
ever, on the other types, the order is clear. The SP
is the most successful, DP and RP performing about
the same, while AP performs the worst. The baseline
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
204
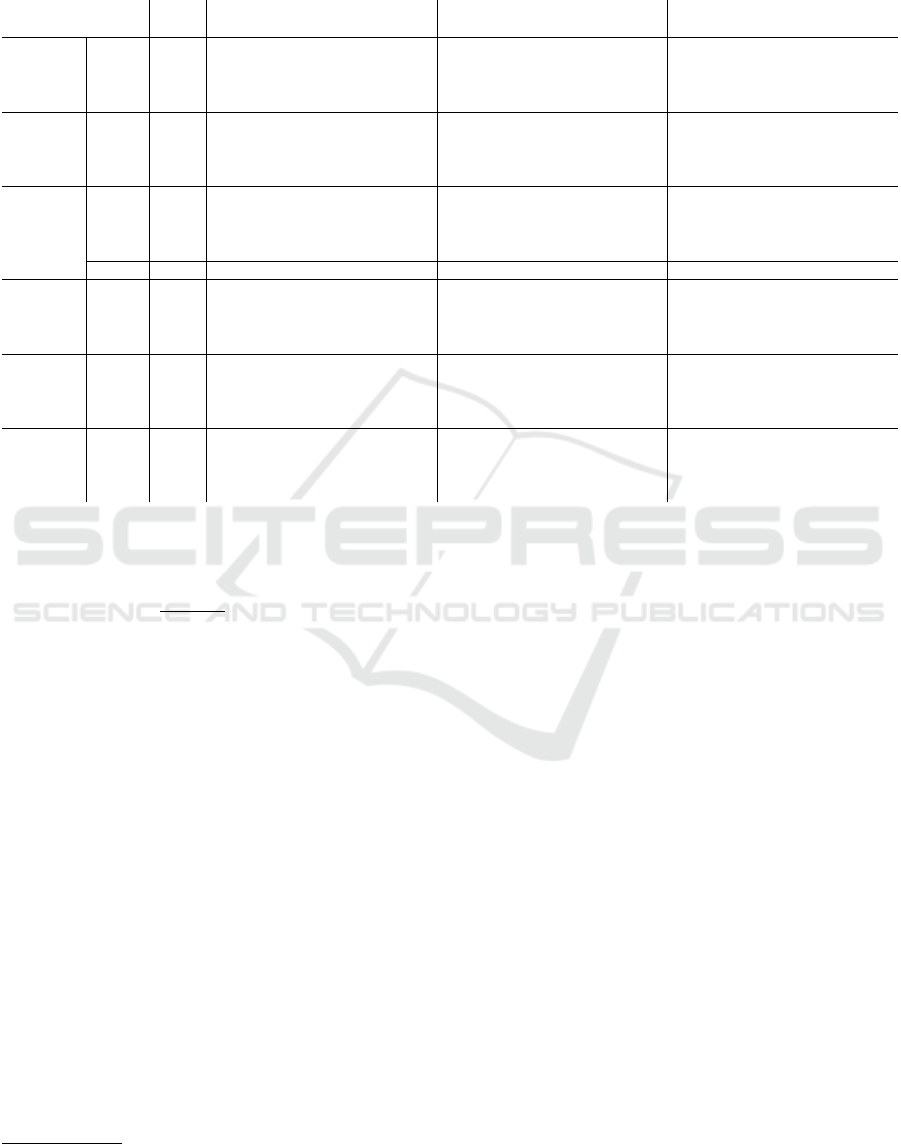
Table 1: Ratio of used vertices, ratio of solved instances, sum of IPC score, ratio of instances solved optimally, average number
of conflicts, and average number of constraints. The results are split by the map type. Strategies are baseline (B), prune-and-
cut (P), makespan-add (M), and combined (C). Approaches to choosing shortest paths are single-path (SP), all-paths (AP),
random-paths (RP), and distant-paths (DP).
B
P C M
type SP AP RP DP SP AP RP DP SP AP RP DP
Used
vertices
empty 1 0.14 0.23 0.21 0.23 0.15 0.24 0.22 0.23 0.19 0.24 0.23 0.24
maze 1 0.18 0.2 0.18 0.19 0.20 0.22 0.21 0.21 0.22 0.22 0.22 0.22
random 1 0.19 0.27 0.24 0.25 0.22 0.3 0.28 0.29 0.25 0.31 0.3 0.31
room 1 0.21 0.24 0.22 0.22 0.23 0.27 0.25 0.25 0.24 0.29 0.27 0.28
Solved
instances
empty 0.78 0.99 0.81 0.84 0.82 1.00 0.81 0.84 0.82 0.87 0.81 0.82 0.8
maze 0.85 0.87 0.88 0.87 0.87 0.98 0.97 0.97 0.98 0.94 0.94 0.94 0.94
random 0.79 0.91 0.82 0.84 0.84 1.00 0.89 0.92 0.91 0.93 0.87 0.89 0.88
room 0.8 0.83 0.81 0.82 0.82 0.97 0.92 0.95 0.94 0.89 0.89 0.89 0.89
∑
IPC
empty 874.6 1930.5 1312.8 1081.7 1086.3 2395.2 1276.5 1406.7 1324.4 1517.9 1275.8 1312.5 1279.2
maze 890.1 1153.2 1123.6 1128.3 1143.3 1775.5 1633.8 1752.8 1754 1475.7 1452.6 1470.5 1466.1
random 886 1668.0 1110.2 1049.9 1102.3 2275.5 1422.4 1594.6 1551.5 1560.7 1300.3 1374.2 1324.4
room 877.3 1386.4 1007.5 1191.6 1179.5 2078.3 1594.5 1850.6 1828.7 1474 1382.6 1461.9 1442
total 3527.9 6138.1 4554.1 4451.6 4511.4 8524.5 5927.2 6604.6 6458.6 6028.4 5411.3 5619.2 5511.6
Solved
optimally
empty - - - - - 0.93 1.00 1.00 1.00 1.00 1.00 1.00 1.00
maze - - - - - 0.91 0.94 0.92 0.92 0.92 0.93 0.93 0.93
random - - - - - 0.89 0.97 0.95 0.96 0.86 0.91 0.91 0.91
room - - - - - 0.86 0.93 0.91 0.92 0.76 0.86 0.85 0.85
Conflicts
empty 133 97 148 131 136 111 147 141 142 139 148 146 148
maze 2457 1239 1804 1274 1265 3101 2969 3120 3143 3361 3482 3443 3354
random 206 193 195 174 173 218 235 234 227 448 458 460 459
room 1007 402 313 270 289 1642 1414 1513 1423 1525 1400 1527 1545
Constraints
[millions]
empty 4.7 7.3 5.1 5.9 5.2 7.4 5.1 6 5.2 6 5.0 5.2 5.0
maze 6.0 6.1 6.4 6 6.2 6.4 6.8 6.5 6.6 6.8 6.8 6.8 6.8
random 5.4 5.9 6 6 6 6 6.1 6.1 6.1 6.1 5.8 6 5.8
room 4.8 5.4 5.6 5.4 5.4 5.7 5.9 5.8 5.7 5.7 5.9 5.9 5.9
B performs worse than any other used combination.
Similar results can be seen when exploring the IPC
score
2
(Computed as 0 if the solver did not finish in
time, otherwise as
min. time
solver time
, where min. time is the
time it took the fastest solver and solver time is the
time it took the solver in question. The score ranges
from 0 to 1, where the bigger the number the bet-
ter. The scores of all instances are summed.) For the
P strategy the AP approach performs better than DP
and RP, meaning that while it did not solve more in-
stances, the instances it managed to solve were solved
faster. For the other strategies, the order remains the
same as with the number of solved instances. It is
unsurprising that the suboptimal strategies achieved a
better score that the optimal P.
We argue that these results stem from the number
of used vertices. By exploring the ASP solver, we
see that for all strategies and all additional shortest
path approaches, the number of conflicts stays mostly
within the same order of magnitude as for SP. Hence,
ASP search difficulty remains unchanged. However,
compared to SP, the other approaches add more ver-
tices to the restricted graph to consider and, in con-
sequence, this increases the grounding time of clingo
which, in turn, leads to more timeouts.
The new shortest path approaches reduce the size
2
introduced at International Planning Competition.
of the internal problem specification in terms of the
number of constraints. We conjecture that since the
new approaches generally select multiple (and more
likely exclusively usable by one agent) vertices for
the restricted graph, the amount of constraints encod-
ing possible agent collisions is reduced. However, as
mentioned above, this has no significant impact on the
search complexity.
We also explore the quality of the solutions pro-
duced by the suboptimal strategies. The ratio of in-
stances solved optimally is again shown in Table 1.
Strategy C is more often optimal compared to M.
This time, we can see the benefit of adding extra ver-
tices to the restricted graph. The most often optimal
approach is AP closely followed by RP and DP, while
SP achieved the worst results. The difference is again
less prominent on maze maps.
7 CONCLUSION
We extended the study on pruning maps to increase
the efficiency of reduction-based MAPF solvers. In
the original paper, only one random path was cho-
sen for each agent to build a restricted graph. Con-
versely, in this paper, we proposed several approaches
to choosing multiple different paths for each agent,
Multi-Agent Pathfinding on Large Maps Using Graph Pruning: This Way or That Way?
205

providing the underlying solver with more choices. In
theory, this should make it possible for the agents to
avoid collisions more easily. In our experiments, we
found that this rarely happens and that it is more ben-
eficial to provide the solver with just one random path
making the relaxed instances simpler for the cost of
possibly having to solve more relaxations. Thus, we
showed that the original approach is justified, a result
that is lacking in the original study. On the other hand,
we also showed that providing the agents with more
possible paths leads more often to an optimal solution
when using one of the suboptimal strategies.
ACKNOWLEDGEMENTS
Research is supported by project P103-19-02183S of
the Czech Science Foundation, the Czech-USA Co-
operative Scientific Research Project LTAUSA19072,
and DFG grant SCHA 550/15, Germany.
REFERENCES
Gebser, M., Kaminski, R., Kaufmann, B., Lindauer, M., Os-
trowski, M., Romero, J., Schaub, T., and Thiele, S.
(2019). Potassco User Guide, 2.2.0.
Gebser, M., Obermeier, P., Otto, T., Schaub, T., Sabuncu,
O., Nguyen, V., and Son, T. (2018a). Experiment-
ing with robotic intra-logistics domains. Theory and
Practice of Logic Programming, 18(3-4):502–519.
Gebser, M., Obermeier, P., Schaub, T., Ratsch-Heitmann,
M., and Runge, M. (2018b). Routing driverless trans-
port vehicles in car assembly with answer set pro-
gramming. Theory and Practice of Logic Program-
ming, 18(3-4):520–534.
G
´
omez, R. N., Hern
´
andez, C., and Baier, J. A. (2021). A
compact answer set programming encoding of multi-
agent pathfinding. IEEE Access, 9:26886–26901.
H
¨
acker, C., Bouros, P., Chondrogiannis, T., and Althaus,
E. (2021). Most diverse near-shortest paths. In 29th
International Conference on Advances in Geographic
Information Systems, pages 229–239. ACM.
Hanaka, T., Kobayashi, Y., Kurita, K., Lee, S. W., and
Otachi, Y. (2021). Computing diverse shortest paths
efficiently: A theoretical and experimental study.
CoRR, abs/2112.05403.
Hus
´
ar, M., Svancara, J., Obermeier, P., Bart
´
ak, R., and
Schaub, T. (2022). Reduction-based solving of
multi-agent pathfinding on large maps using graph
pruning. In 21st International Conference on Au-
tonomous Agents and Multiagent Systems, pages 624–
632. IFAAMAS.
Kaminski, R., Romero, J., Schaub, T., and Wanko, P.
(2022). How to build your own ASP-based sys-
tem?! Theory and Practice of Logic Programming,
23(1):299-361.
Kornhauser, D., Miller, G. L., and Spirakis, P. G. (1984).
Coordinating pebble motion on graphs, the diame-
ter of permutation groups, and applications. In 25th
Annual Symposium on Foundations of Computer Sci-
ence, pages 241–250.
Li, J., Tinka, A., Kiesel, S., Durham, J. W., Kumar, T.
K. S., and Koenig, S. (2020). Lifelong multi-agent
path finding in large-scale warehouses. In 19th Inter-
national Conference on Autonomous Agents and Mul-
tiagent Systems, pages 1898–1900. IFAAMAS.
Nguyen, V., Obermeier, P., Son, T. C., Schaub, T., and Yeoh,
W. (2017). Generalized target assignment and path
finding using answer set programming. In 26th In-
ternational Joint Conference on Artificial Intelligence,
pages 1216–1223. ijcai.org.
Ratner, D. and Warmuth, M. K. (1990). NxN puzzle
and related relocation problem. J. Symb. Comput.,
10(2):111–138.
Sharon, G., Stern, R., Goldenberg, M., and Felner, A.
(2011). The increasing cost tree search for optimal
multi-agent pathfinding. In 22nd International Joint
Conference on Artificial Intelligence, pages 662–667.
Silver, D. (2005). Cooperative pathfinding. In Artifi-
cial Intelligence and Interactive Digital Entertain-
ment, pages 117–122.
Stern, R., Sturtevant, N. R., Felner, A., Koenig, S., Ma, H.,
Walker, T. T., Li, J., Atzmon, D., Cohen, L., Kumar,
T. K. S., Bart
´
ak, R., and Boyarski, E. (2019). Multi-
agent pathfinding: Definitions, variants, and bench-
marks. In 12th International Symposium on Combi-
natorial Search, pages 151–159. AAAI Press.
Surynek, P. (2019). Unifying search-based and
compilation-based approaches to multi-agent
path finding through satisfiability modulo theories.
In 28th International Joint Conference on Artificial
Intelligence, pages 1177–1183. ijcai.org.
Svancara, J. and Bart
´
ak, R. (2019). Combining strengths of
optimal multi-agent path finding algorithms. In 11th
International Conference on Agents and Artificial In-
telligence, pages 226–231. SciTePress.
Yu, J. and LaValle, S. M. (2013). Structure and intractability
of optimal multi-robot path planning on graphs. In
27th AAAI Conference on Artificial Intelligence.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
206
