Monocular Depth Estimation for Tilted Images via Gravity Rectifier
Yuki Saito
1
, Hideo Saito
1
and Vincent Fr
´
emont
2
1
Faculty of Science and Technology, Keio University, Yokohama, Kanagawa, Japan
2
CNRS, LS2N, Nantes Universite, Ecole Central de Nantes, UMR 6004, F-44000 Nantes, France
Keywords:
Monocular Depth Estimation, Tilted Images, Gravity Prediction, Convolutional Neural Network.
Abstract:
Monocular depth estimation is a challenging task in computer vision. Although many approaches using Con-
volutional neural networks (CNNs) have been proposed, most of them are trained on large-scale datasets
mainly composed of gravity-aligned images. Therefore, conventional approaches fail to predict reliable depth
for tilted images containing large pitch and roll camera rotations. To tackle this problem, we propose a novel
refining method based on the distribution of gravity directions in the training sets. We designed a gravity
rectifier that is learned to transform the gravity direction of a tilted image into a rectified one that matches
the gravity-aligned training data distribution. For the evaluation, we employed public datasets and also cre-
ated our own dataset composed of large pitch and roll camera movements. Our experiments showed that our
approach successfully rectified the camera rotation and outperformed our baselines, which achieved 29% im-
provement in abs rel over the vanilla model. Additionally, our method had competitive accuracy comparable
to state-of-the-art monocular depth prediction approaches considering camera rotation.
1 INTRODUCTION
Monocular depth estimation, i.e., predicting a dense
depth map from a single RGB image, is an essential
task that is widely employed in many robotics and au-
tonomous system tasks, such as ego-motion estima-
tion (Tateno et al., 2017; Czarnowski et al., 2020),
robot navigation systems (Yang et al., 2019; Marcu
et al., 2018; Zhang et al., 2019), and augmented re-
ality (Wang et al., 2018; Luo et al., 2020). Re-
cently, depth prediction based on convolutional neural
networks (CNNs) has demonstrated successful per-
formance on many benchmark scores and predicted
plausible depth appearance (Eigen et al., 2014; Laina
et al., 2016; Fu et al., 2018; Godard et al., 2019).
Depth prediction approaches with CNN are gen-
erally trained with large-scale image datasets, which
contain millions of RGB-D image pairs for various
indoor and outdoor scenes (Dai et al., 2017; Silber-
man et al., 2012; Sturm et al., 2012; Geiger et al.,
2013). However, these images are mainly captured
under certain camera motions, which leads to biased
camera pose distributions in the training set.
As a result, conventional depth prediction ap-
proaches fail to estimate reliable depth maps on im-
ages captured under uncommon camera poses, such
as tilted inputs, which include large roll and pitch ro-
tations (Saito et al., 2020; Zhao et al., 2021). For
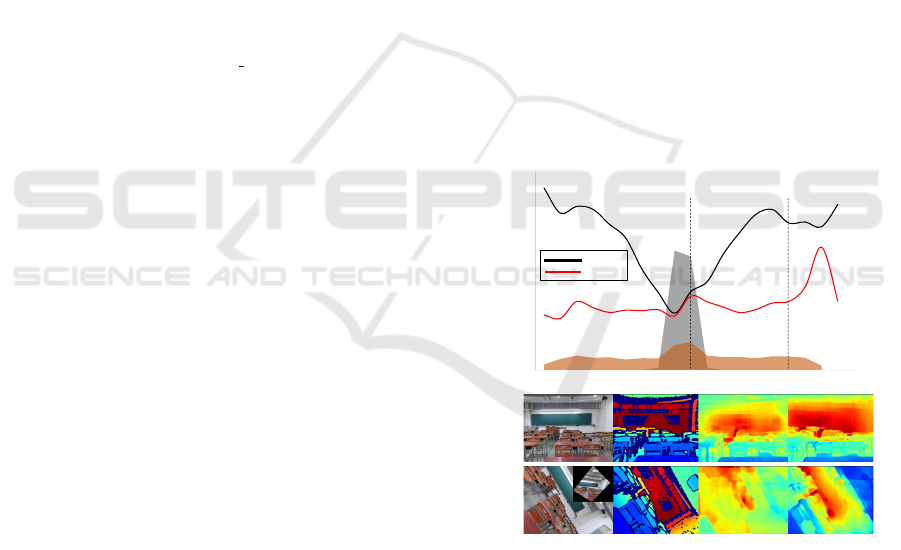
illustration, Figure 1 shows the distribution of camera
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.000
0.100
0.200
0.300
0.400
0.500
-80 -60 -40 -20 0 20 40 60 80
roll (degrees)
(a) (b)
(a)
(b)
Input
Ground truth Baseline
Ours
Ours
Baseline
Pred.error
Figure 1: Distribution bias of camera rotation between the
training set and test set. The horizontal axis shows the roll
rotation angle of the camera (degree), and the vertical axis
shows absolute relative error. The training set distribution
is shown in gray, and the test set distribution is shown in
orange.(a) shows the predicted depth in the upright scene,
and (b) shows the predicted depth in tilted scenes.
rotation along roll directions in the ScanNet dataset
(Dai et al., 2017). The distribution in the train-
ing set is gathered around 0
◦
, and tilted scenes with
large roll rotation are not equally represented in deep
neural networks. Therefore, compared with gravity-
Saito, Y., Saito, H. and Frémont, V.
Monocular Depth Estimation for Tilted Images via Gravity Rectifier.
DOI: 10.5220/0011624600003417
In Proceedings of the 18th Inter national Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
453-463
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
453

aligned scenes (a), the conventional depth prediction
approach (Baseline) was unable to predict a reliable
depth map on tilted scenes (b), and its prediction er-
ror significantly increased. This performance degra-
dation causes a crucial problem in applications for
which body-/robot-mounted cameras are employed
and tilted images are easily captured under unex-
pected control, e.g., mobile AR (Luo et al., 2020) and
UAV (Marcu et al., 2018; Zhang et al., 2019).
To tackle this problem, several works have re-
cently been proposed for monocular depth estima-
tion by introducing camera pose as prior information.
Saito et al. (Saito et al., 2020) and Sartipi et al. (Sar-
tipi et al., 2020) proposed a method to rectify the
in-plane rotation of images with Visual-SLAM (Mur-
Artal and Tard
´
os, 2017), which enabled more accurate
depth prediction. Also, Zhao et al. (Zhao et al., 2021)
proposed a method to incorporate 2D maps encoded
from camera poses with RGB input as prior knowl-
edge of depth prediction. However, these methods
heavily relied on offline pose estimation systems or
external sensors, which required high computational
costs or additional equipment, like an inertial mea-
surement unit (IMU).
In this paper, we addressed this challenging task
for depth estimation with tilted inputs leveraging only
RGB information. We hypothesized that gravity di-
rection is an indicator of the global orientation of the
scene, which is a strong prior to depth estimation with
CNNs (Saito et al., 2020; Mi et al., 2022; Do et al.,
2020). We considered that gravity alignment between
the training set and the test set can minimize the do-
main gap between the test set composed of tilted im-
ages and the training set composed of upright images.
To this end, we proposed a gravity rectifier net-
work to learn transformation that warps tilted input
to an upright image so that its gravity direction can
be matched to the dominant direction, where most of
the gravity vectors in the training set are densely dis-
tributed.
Different from previous approaches, our method
does not need highly functional sensors like IMUs or
other back-end systems for camera pose prediction.
Furthermore, as our method does not rely on a par-
ticular backbone of depth estimation network and is
computationally efficient, it can be easily integrated
into a real-time application for scene understanding
(Jiang et al., 2018; Chen et al., 2019) or scene re-
construction (Wang et al., 2018; Laidlow et al., 2019;
Tateno et al., 2017).
For the experiments, we employed not only Scan-
Net (Dai et al., 2017) and NYUv2 (Silberman et al.,
2012) datasets but also recorded a new dataset with
a large roll or pitch camera movement for various in-
door scenes. We evaluated our approach with three
baseline methods, including data augmentation base-
line, and verified that our gravity rectifier significantly
improved depth prediction accuracy qualitatively and
quantitatively. Moreover, we compared our method
with state-of-the-art approaches with camera pose pri-
ors and achieved highly competitive accuracy with
only RGB information.
In summary, our contributions are as follows: (1)
We proposed a gravity rectifier that enables better per-
formance by synthesizing gravity-aligned images for
monocular depth estimation leveraging only RGB in-
formation without any external systems or sensors.
(2) We created a new dataset including large cam-
era rotation along with roll and pitch directions un-
der various indoor scenes. (3) Our proposed method
outperformed our baselines (which achieved 38% im-
provement in abs rel over the vanilla model) and had
comparable accuracy compared with state-of-the-art
approaches.
2 RELATED WORK
2.1 Monocular Depth Estimation
Inferring depth from a single RGB image is an ill-
posed problem as 3D points from multiple depth
planes are projected to the same pixel on the im-
age plane. Conventional approaches originally relied
on stereo vision (Agarwal et al., 2009; Sinz et al.,
2004) or different shading conditions (Zhang et al.,
1999; Suwajanakorn et al., 2015). Recently, CNN-
based depth prediction trained on large-scale datasets
demonstrated promising results and enabled the pro-
duction of reasonable depth maps (Eigen et al., 2014;
Laina et al., 2016; Fu et al., 2018).
Nevertheless, they still have difficulties obtaining
accurate depth under extreme circumstances. One
of the main issues is the pure-rotation of the camera
at inference time. Previous work (Dijk and Croon,
2019) analyzed CNN-based depth prediction, which
performed poorly on images captured under unusual
camera poses not included in the training data. To
address this problem, we propose a novel depth pre-
diction technique by refining camera poses to fill the
gap between camera pose distribution in the training
set and test set.
2.2 Gravity Estimation
Predicting gravity direction, i.e., estimating global
scene orientation, is a fundamental task in computer
vision. Conventional works (Lee and Yoon, 2015;
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
454

Mirzaei and Roumeliotis, 2011) have leveraged visual
cues such as vanishing points in indoor scenes to esti-
mate gravity without external sensors like IMUs. Re-
cently, learning-based approaches with deep regres-
sion models have been proposed by employing rich
geometric representations extracted from an RGB im-
age (Olmschenk et al., 2017; Xian et al., 2019). How-
ever, they have relied on the sophisticated network ar-
chitecture of CNN or non-linear geometric optimiza-
tion, which would be difficult for online gravity esti-
mation.
Furthermore, the idea of predicting gravity from
Visual SLAM has been proposed (Saito et al., 2020;
Sartipi et al., 2020; Fei et al., 2019), which has en-
abled more accurate monocular depth estimation or
surface normal estimation. Nevertheless, these meth-
ods require highly functional sensors like IMUs or of-
fline pose estimation backbones.
Unlike previous methods that rely on external sen-
sors or offline gravity estimation, we propose here
a gravity rectifier network that directly regresses the
gravity direction and can be trained with a depth es-
timation network in an end-to-end manner. Inspired
by the spatial transformer network (Jaderberg et al.,
2015), our network transforms a tilted image with ho-
mography warping induced from 3D rotation parame-
terized by gravity direction, improving the prediction
accuracy of a depth map.
2.3 Rotation-Aware Prediction
Conventional CNN models fail in dense prediction
tasks on images captured in uncommon camera poses,
like tilted inputs. This is mainly caused by distri-
bution bias with the training set and test set, e.g.,
training examples might be collected with minimal
roll and pitch rotations, but the testing environment
where users can control body-/robot-mounted cam-
eras freely might capture images containing large roll
and pitch rotations.
To overcome this issue, Saito et al. (Saito et al.,
2020) and Sartipi et al. (Sartipi et al., 2020) proposed
rectifying roll rotation of tilted images with camera
poses from Visual-SLAM. Also, Zhao et al. (Zhao
et al., 2021) incorporated encoded camera poses from
IMUs into the depth prediction network directly. Nev-
ertheless, they heavily relied on offline pose estima-
tion systems (SLAM) or external sensors (IMUs),
resulting in high computational costs or additional
equipment.
Moreover, Do et al. (Do et al., 2020) proposed
a new refinement method for tilted images in single-
view surface normal prediction. They transformed
the tilted images to rectified ones so that their surface
normal distributions could be matched to those of the
gravity-aligned images in the training data.
In this paper, we explore the benefit of spatial
transformation to align tilted images to upright ones.
Our proposed gravity rectifier, which can be trained
in an end-to-end fashion only employed RGB infor-
mation and corrected roll and pitch rotations with ho-
mography warping.
3 PROPOSED METHOD
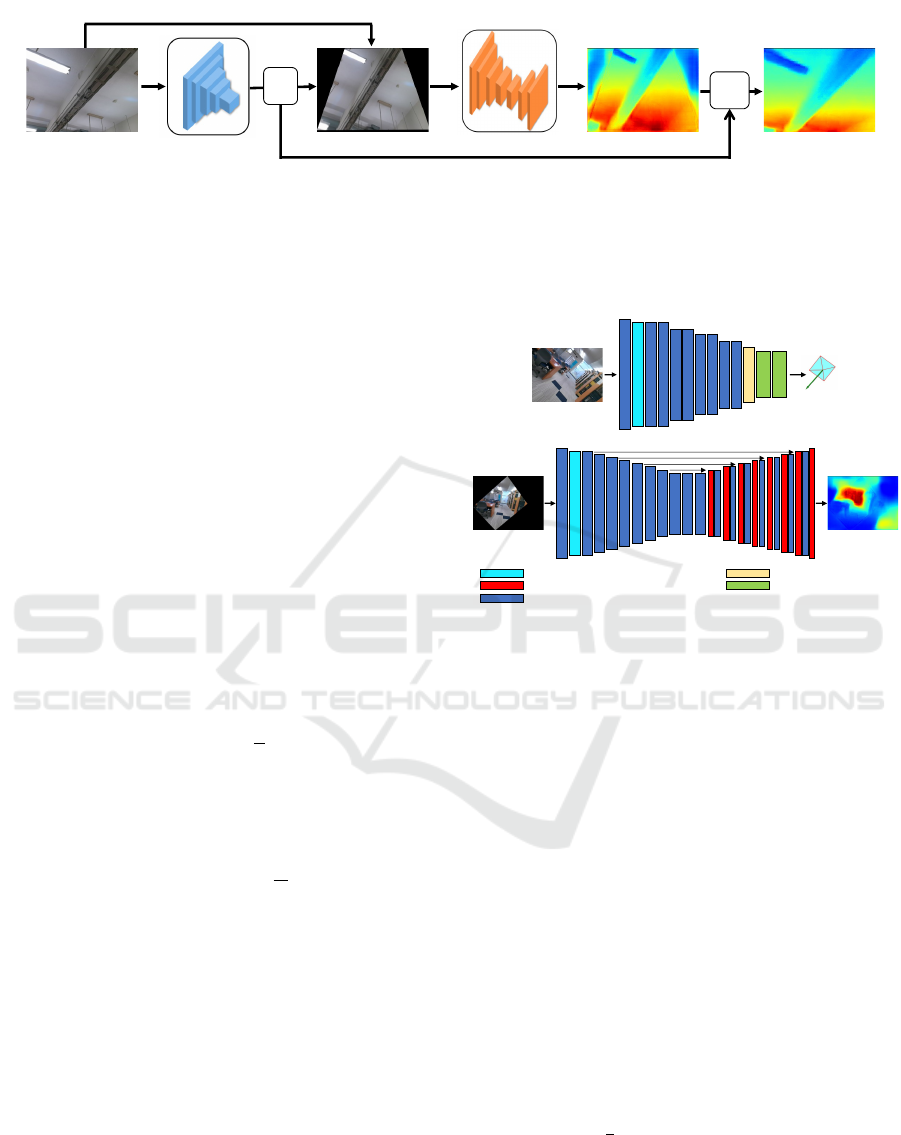
Figure 2 shows the overview of our proposed net-
works. First, we input tilted images into a gravity es-
timator and predict gravity directions. Second, input
images are warped with a gravity rectifier so that the
estimated gravity directions is matched to the domi-
nant direction of the gravity in the training set. Third,
the rectified images are input into the depth prediction
network. Finally, we re-warp the output depth map to
the inverse direction so that the predicted depth map
has the same resolution of the original image.
3.1 Gravity Rectifier
Given a tilted image I , we compute the gravity di-
rection via a gravity predictor network formulated as
a regression problem to produce gravity-aligned im-
ages I through a gravity rectifier.
The Gravity prediction network takes as input q ∈
R (I ) and outputs its gravity direction g ∈ R
3
. Then,
the gravity-aligned image is expressed as Eq.1
I (q) = I (W
g
(q)) (1)
where W
g
is the gravity rectifier that warps a tilted
image I to the rectified image I . Suppose now that K
is the camera intrinsic matrix so the gravity rectifier
is expressed as a homography induced by the camera
rotation like Eq.2.
W
g
= KR
g
K
−1
(2)
Here, camera rotation R
g
maps gravity direction g
to dominant direction a ∈ R
3
, written as Eq.3.
R
g
= I
3
+ [g × a]
×
+ [g × a]
2
×
×
1
1 + a
T
g
(3)
I
3
is 3 × 3 the identity matrix, and [g × a]
×
is a
skew-symmetric matrix of g × a. Here, we define the
dominant direction a = [0, 1, 0]
T
as a unit vector along
the vertical axis of the camera, where the distribution
of ground truth gravity directions in the training set is
most densely distributed.
Monocular Depth Estimation for Tilted Images via Gravity Rectifier
455
Gravity Rectifier 𝒉
𝜽
Rectified image Rectified depthmap Output depthmap
𝑾
𝒈
Warping
Depth Estimation Network 𝒇
∅
Inverse Warping
input image
𝑾
𝒈
"𝟏
Figure 2: The overview of our proposed method. The gravity rectifier h
θ
is learned to predict gravity direction g in the tilted
image. This allows us to warp the tilted image to the rectified image whose gravity direction matches the gravity distribution
of the training data. The gravity estimation network f
φ
is used to predict the rectified depth maps and warp back to the tilted
depth maps.
3.2 Network Architecture
We summarized the network architecture of both
gravity rectifier h
θ
and depth estimation network f
φ
in Figure 3.
The gravity rectifier network h
θ
predicts the grav-
ity direction g ∈ R
3
from tilted image q ∈ R (I ) as in
Eq.4.
h
θ
(q;I ) = g
T
(4)
The architecture is built upon Resnet-18 (He et al.,
2016). The last fully connected layer and softmax
function, which was part of the original architec-
ture, are replaced with our novel multilayer percep-
tron (MLP). The MLP is composed of two fully con-
nected layers (128, 3 output channels each) and recti-
fied linear units (ReLU) activation functions, yielding
an output of 3 × 1 gravity vector.
Then, the depth estimation network f
φ
takes
gravity-aligned image q ∈ R (I ) as input and pre-
dicts its corresponding depth map. Our final depth
d
q
∈ R is obtained by applying an inverse warping of
the gravity rectifier to the predicted depth map, as in
Eq.5.
d
q
= v
T
R
g
T
f
φ
(W
−1
g
(q);I
t
)K
−1
q
h
(5)
where R
g
and W
g
are defined in section 3.1, and
v = [0, 0, 1]
T
. We employ U-Net style architecture
(Ronneberger et al., 2015) based on Resnet-50 (He
et al., 2016) for the encoder part. We replaced the
last average pooling and fully connected layers of the
original Resnet-50 architecture with a convolutional
layer and Batch Normalization instead, yielding a fea-
ture map with 1024 output channels. This feature
map is then fed to a decoder part composed of succes-
sive series of bi-linear upsampling and convolutional
layers with their skip connections. The convolution
layer in our decoder applies to the concatenation of
the block after bi-linear upsampling and the block in
the encoder with the same spatial size.
64 × 120 × 160
64 × 60 × 80
256 × 60 × 80
512 × 30 × 40
2048 × 15 × 20
Upsampling layer with bi-linear upsampling
Residual block with Conv2d + Batch Norm + ReLU
MaxPooling + Dropout layer
Rectified image
Rectified depth
64 × 120 × 160
Avg pooling Layer
Input image
graviry dir
512 × 1 × 1
Fully Connected Layer + ReLU
FC 128
FC 3
64 × 60 × 80
𝒈
Gravity Rectifier 𝒉
𝜽
Depth Estimation Network 𝒇
∅
64 × 60 × 80
64 × 60 × 80
256 × 15 × 20
512 × 8 × 10
128 × 30 × 40
240 × 320 × 3
240 × 320 × 3 240 × 320 × 3
3 × 1
Figure 3: The architecture of our gravity rectifier and depth
estimation network.
3.3 Loss Function
We learn the parameters of our total networks (φ and
θ) by minimizing the following loss:
L(φ, θ) =
∑
q∈R (I )
L
φ
(d
q
,
ˆ
d
q
) + λL
θ
(g
T
,
ˆ
g) (6)
where
ˆ
d
q
is a ground truth depth map of tilted input
I and
ˆ
g is a ground truth gravity vector of I . λ is a
scalar parameter balancing both the gravity prediction
network and the depth prediction network.
For gravity predictor network loss L
θ
, we employ
truncated angular loss as proposed in (Do et al., 2020)
to avoid a vanishing gradient around the small angular
error as follows:
L
θ
(g
T
,
ˆ
g) =
0 (1 − ε ≤ g
T
ˆ
g)
cos
−1
(g
T
,
ˆ
g) (0 ≤ g
T
ˆ
g < 1 − ε)
π
2
− g
T
ˆ
g (g
T
ˆ
g < 0)
(7)
,where ε = 10
−6
.
For the depth prediction network loss L
φ
, we
adopt the loss function proposed by (Alhashim and
Wonka, 2018) composed of mean absolute error
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
456

(MAE) and structural similarity (SSIM) (Wang et al.,
2004) loss:
L
φ
(d
q
,
ˆ
d
q
) = γL
MAE
(d
q
,
ˆ
d
q
) + L
SSIM
(d
q
,
ˆ
d
q
) (8)
where
L
MAE
(d
q
,
ˆ
d
q
) =
1
n
∑
q
|d
q
−
ˆ
d
q
| (9)
L
SSIM
(d
q
,
ˆ
d
q
) =
1 − SSIM(d
q
,
ˆ
d
q
)
2
(10)
n is the total number of pixels of depth map d
q
and γ
is a scalar parameter for the MAE term which is set
as γ = 0.1.
4 EXPERIMENTS
4.1 Evaluation Dataset
To evaluate our proposed method, we employed pub-
licly available RGB-D datasets of ScanNet (Dai et al.,
2017) and NYUv2 (Silberman et al., 2012) that are
almost composed of upright scenes. However, these
datasets are not sufficient for evaluating the robust-
ness of our method since they are captured under lim-
ited camera motions containing minimal pitch and roll
rotations. Therefore, we recorded a new dataset com-
posed of tilted scenes at various indoor scenes with
Kinect Azure.
ScanNet (Dai et al., 2017): an RGB-D video dataset
containing a large variety of indoor scenes. We used
the 20,942 images from their standard testing split.
For the ground truth gravity vector, we calculated the
ground plane’s normal direction from semantic labels
and its point cloud.
NYUv2 (Silberman et al., 2012): an RGB-D dataset
captured with MS Kinect V1. We employed a labeled
sequence for testing, which contains 654 image pairs.
We employed accelerometer data in the dataset for the
ground truth gravity vector.
OurDataset: We collected a new free-hand dataset
with Kinect Azure that included 12 different scenes.
Each RGB-D image pair was recorded in the resolu-
tion of 480×640 and ground truth gravity vector from
IMU with 30 frames per second (FPS). Two types of
scenes are collected. (i) Roll-rotated scenes: We ap-
plied strong roll rotation of the camera ranging from
-90
◦
to 90
◦
. We captured 1,520 images composed of
six sequences. (ii) Pitch-rotated scenes: We also cap-
tured images with pitch rotation from -45
◦
to 45
◦
. We
captured 1,717 images composed of six sequences. In
each scene, roll and pitch angles are uniformly dis-
tributed.
4.2 Network Training
We trained our model with a standard train-
ing/validation split of ScanNet (Dai et al., 2017):
189,916 images for training, 53,193 images for vali-
dation. We employed a batch size of 32 and optimized
using Adam (Kingma and Ba, 2015) with a learn-
ing rate of 1.0 × 10
−4
. The model converged after
40 epochs, which takes about 30 hours on a GeForce
RTX 3090 GPU (24 GB of memory). All frames
were resized into resolution 240 × 320. For our loss
function of Eq.6, we used λ = 0.01. The weights of
Resnet-18 and Resnet-50 (He et al., 2016) in both the
gravity prediction network and depth prediction net-
work were initialized with the pre-trained ImageNet
(Deng et al., 2009). Our code, dataset are available
on GitHub
1
.
4.3 Evaluation Details
We evaluated our method with baselines quantita-
tively and qualitatively. We set our own baselines:
• ResnetUnet. We trained the depth prediction net-
work described in Section 3.2 without any data
augmentation or pose rectification.
• ResnetUnet+AUG. We trained the depth predic-
tion network with data augmentation (AUG) by
synthesizing tilted images with random camera
rotation around the roll and pitch directions. We
applied random roll rotation from -90
◦
to 90
◦
and
pitch rotation from -45
◦
to 45
◦
. Note that this
model does not take rectified images as input.
• ResnetUnet+IMU. We trained the depth pre-
diction network with gravity-aligned images us-
ing ground truth gravity vectors. We employed
ground plane normal direction as gravity vectors
in ScanNet (Dai et al., 2017).
• ResnetUnet+GR (Ours). We trained the depth
prediction network with gravity rectifier (GR) de-
scribed in Section 3.1.
We also compared our approach with state-of-the-
art methods of monocular depth estimation with cam-
era pose priors.
• Saito et al. (Saito et al., 2020): A training-
free depth prediction approach for roll-rotated
scenes with offline pose estimation from RGB-
SLAM. For the depth prediction network, we in-
put gravity-aligned images warped from tilted in-
puts with affine transformation. We employed the
1
https://github.com/WeLoveKiraboshi/DeepTiltedDep
thEstimation
Monocular Depth Estimation for Tilted Images via Gravity Rectifier
457
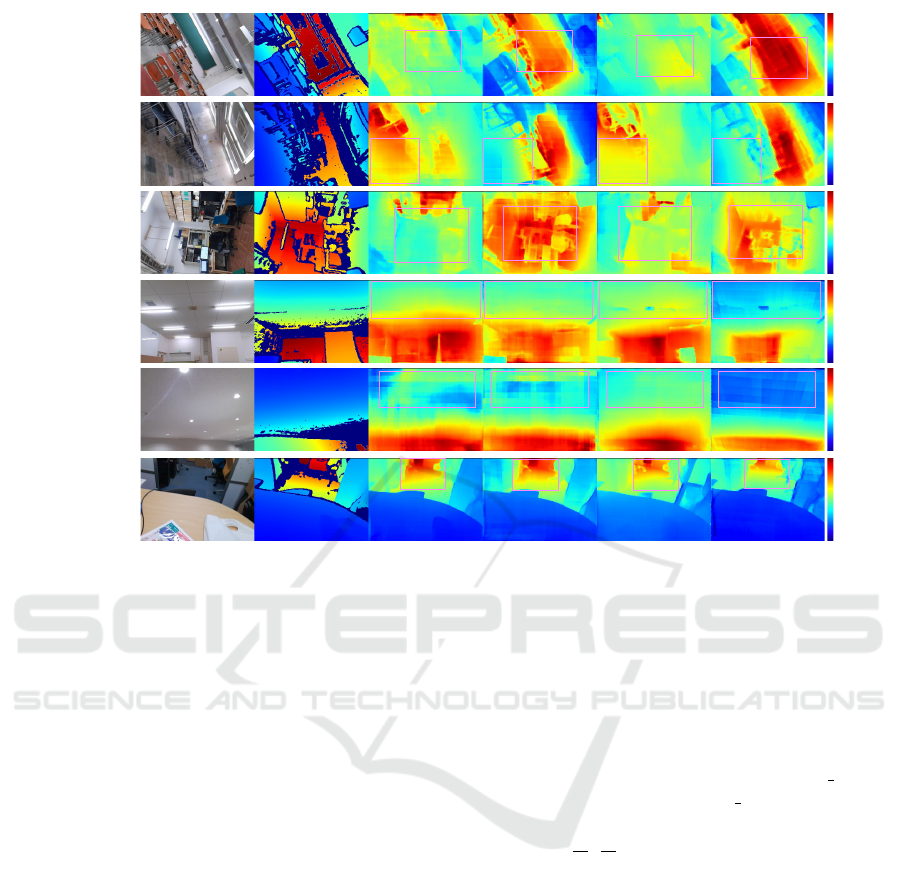
Roll/Seq1
Roll/Seq2
Roll/Seq3
Pitch/Seq4
Pitch/Seq5
Pitch/Seq6
Input
ResnetUnet
Ground truth
ResnetUnet+AUG ResnetUnet+IMU ResnetUnet+GR
1.0
8.0
4.5
2.0
9.0
5.5
1.0
5.5
3.3
1.0
9.0
5.0
1.5
9.5
5.5
0.5
4.0
2.3
Figure 4: Qualitative results on our test dataset compared with our baseline methods: ResnetUnet, ResnetUnet+AUG, Resne-
tUnet+IMU. Note that the depth pixel colored in red shows that the depth is a large value, and the pixel colored in blue shows
that the depth is a small value.
weight of ResnetUnet trained without any data
augmentation and pose rectification.
• Zhao et al.(CPP) (Zhao et al., 2021): A method
to estimate depth from concatenated images of
RGB input and a 2D map encoded from a ground
truth camera pose. We calculated ground truth
pitch angle, roll, angle, and camera height from
the ground plane in ScanNet (Dai et al., 2017).
• Zhao et al.(CPP
pred
) (Zhao et al., 2021): A
method to estimate depth with a 2D map encoded
from a predicted camera pose of CNN. For the
pose prediction network, we employed the same
architecture of our gravity rectifier with Resnet-
18 backbone (He et al., 2016). We initialized the
network weight with ImageNet pre-trained (Deng
et al., 2009). We also applied random augmen-
tation for input: roll rotation ranging from -90
◦
to
90
◦
and pitch rotation ranging from -45
◦
to 45
◦
.
• Zhao et al.(CPP + PDA) (Zhao et al., 2021): A
method to estimate depth with a CPP map and
data augmentation by synthesizing tilted images
with random camera rotation (PDA). We applied
roll rotation ranging from -90
◦
to 90
◦
and pitch ro-
tation ranging from -45
◦
to 45
◦
for augmentation.
4.4 Evaluation Metrics
We evaluated the accuracy of predicted depth
maps with the standard four metrics used in prior
works(Eigen et al., 2014; Alhashim and Wonka,
2018): (a) mean absolute relative error (abs rel), (b)
mean squared relative error (sq rel), (c) root mean
squared error (rmse), (d) threshold accuracy (δ
i
) for
which max(
d
q
ˆ
d
q
,
ˆ
d
q
d
q
) < 1.25
i
(i = 1, 2, 3), where d
q
is
the predicted depths and
ˆ
d
q
is the ground truth depths.
5 RESULTS
5.1 Qualitative Evaluation
Figure 4 shows the qualitative results of our pre-
dicted depth map tested on our test dataset com-
pared with our own baselines (ResnetUnet, Resne-
tUnet+AUG, ResnetUnet+IMU). Although some of
our baselines (ResnetUnet, ResnetUnet+IMU) failed
to estimate a reasonable depth map, especially in
roll-rotated scenes, our predicted depth map (Resne-
tUnet+GR) had a more plausible appearance to
ground truth depth, as well as an augmented model
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
458
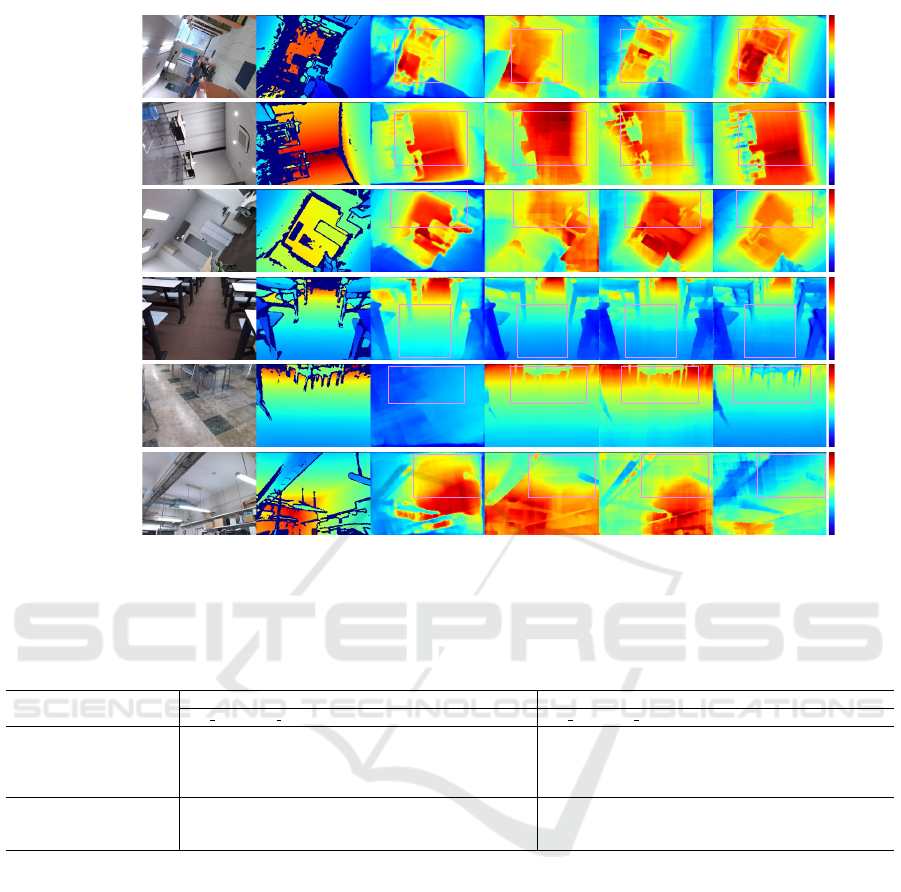
Roll/Seq4
Roll/Seq5
Pitch/Seq1
Pitch/Seq2
Input Saito et al.Ground truth CPP CPP+PDA ResnetUnet+GR
Roll/Seq6
Pitch/Seq3
1.5
9.0
5.3
1.5
6.5
4.0
1.5
8.5
5.0
0.5
4.5
2.5
1.0
3.0
1.5
1.5
7.5
4.5
Figure 5: Qualitative results on our test dataset compared with state-of-the-art methods: Saito et al. (Saito et al., 2020) and
Zhao et al. (Zhao et al., 2021). Note that the depth pixel colored in red shows that the depth is a large value, and the pixel
colored in blue shows that the depth is a small value.
Table 1: The quantitative results of our method with all baselines on gravity-aligned scenes from test sequences of ScanNet
and NYUv2.
Method
ScanNet NYUv2
abs rel ↓ sq rel ↓ rmse ↓ δ
1
↑ δ
2
↑ δ
3
↑ abs rel ↓ sq rel ↓ rmse ↓ δ
1
↑ δ
2
↑ δ
3
↑
ResnetUnet 0.133 0.068 0.317 0.814 0.951 0.986 0.179 0.154 0.648 0.711 0.917 0.973
ResnetUnet+AUG 0.145 0.078 0.348 0.787 0.943 0.983 0.196 0.180 0.707 0.661 0.891 0.966
ResnetUnet+IMU 0.211 0.134 0.419 0.695 0.900 0.968 0.197 0.176 0.692 0.682 0.904 0.972
ResnetUnet+GR (Ours) 0.132 0.068 0.313 0.818 0.951 0.987 0.171 0.147 0.619 0.734 0.920 0.976
Zhao et al. (CPP) 0.114 0.059 0.274 0.855 0.957 0.986 0.205 0.178 0.686 0.663 0.900 0.971
Zhao et al. (CPP
pred
) 0.136 0.073 0.309 0.824 0.950 0.984 0.176 0.151 0.633 0.725 0.915 0.974
Zhao et al. (CPP + PDA) 0.135 0.073 0.330 0.811 0.947 0.983 0.199 0.186 0.709 0.665 0.897 0.969
(ResnetUnet+AUG). This performance degradation is
caused by a domain gap between the training set and
the test set, i.e., the training set is mainly composed of
gravity-aligned images while the testing tilted images
have large roll and pitch angles.
We also summarized the qualitative results com-
pared with state-of-the-art methods with camera pose
priors tested on our test dataset in Figure 5. Saito
et al. (Saito et al., 2020) which rectify tilted inputs
with RGB-SLAM, seemed to make erroneous pre-
dictions in large pitch-rotated scenes since they only
considered the rectification of roll rotation with 2D
affine transformation. On the other hand, Zhao et
al. (CPP, CPP+PDA) (Zhao et al., 2021) seemed to
predict a more reliable depth map in both roll- and
pitch- rotated scenes due to its strong prior of ground
truth camera poses. While these prior works com-
pletely relied on external sensors or systems like IMU
and SLAM, our proposed method (ResnetUnet+GR)
successfully produced visually improved results even
though we only employed RGB information for pre-
diction.
5.2 Quantitative Evaluation
Table 1 shows the quantitative results of our proposed
method evaluated on gravity-aligned scenes from test
sequences of ScanNet (Dai et al., 2017) and NYUv2
(Silberman et al., 2012) datasets. We observed that
all networks performed excellently on unseen gravity-
aligned frames in ScanNet, as the dataset contains
sufficient scene diversity. Our proposed method
(ResnetUnet+GR) slightly underperformed compared
to Zhao et al. (CPP) due to the lack of ground truth
Monocular Depth Estimation for Tilted Images via Gravity Rectifier
459
Scannet (train)
OurDataset Roll rotated scenes (test)
Scannet (train)
OurDataset Pitch rotated scenes (test)
0
0.5
1
1.5
0
0.1
0.2
0.3
0.4
0.5
-80 -60 -40 -20 0 20 40 60 80
abs_rel
Roll angle (degree)
ResnetUnet+GR(Ours) ResnetUnet ResnetUnet+AUG ResnetUnet+IMU
0
0.3
0.6
0.9
1.2
-80 -60 -40 -20 0 20 40 60 80
abs_rel
Pitch angle (degree)
ResnetUnet+GR(Ours) ResnetUnet ResnetUnet+AUG ResnetUnet+IMU
0
0.5
1
1.5
0
0.1
0.2
0.3
0.4
0.5
-80 -60 -40 -20 0 20 40 60 80
abs_rel
Roll angle (degree)
ResnetUnet+GR(Ours) Saito et al. Zhao et al. (CPP) Zhao et al. (CPP+PDA)
0
0.3
0.6
-80 -60 -40 -20 0 20 40 60 80
abs_rel
Pitch angle (degree)
ResnetUnet+GR(Ours) Saito et al. Zhao et al.(CPP) Zhao et al.(CPP+PDA)
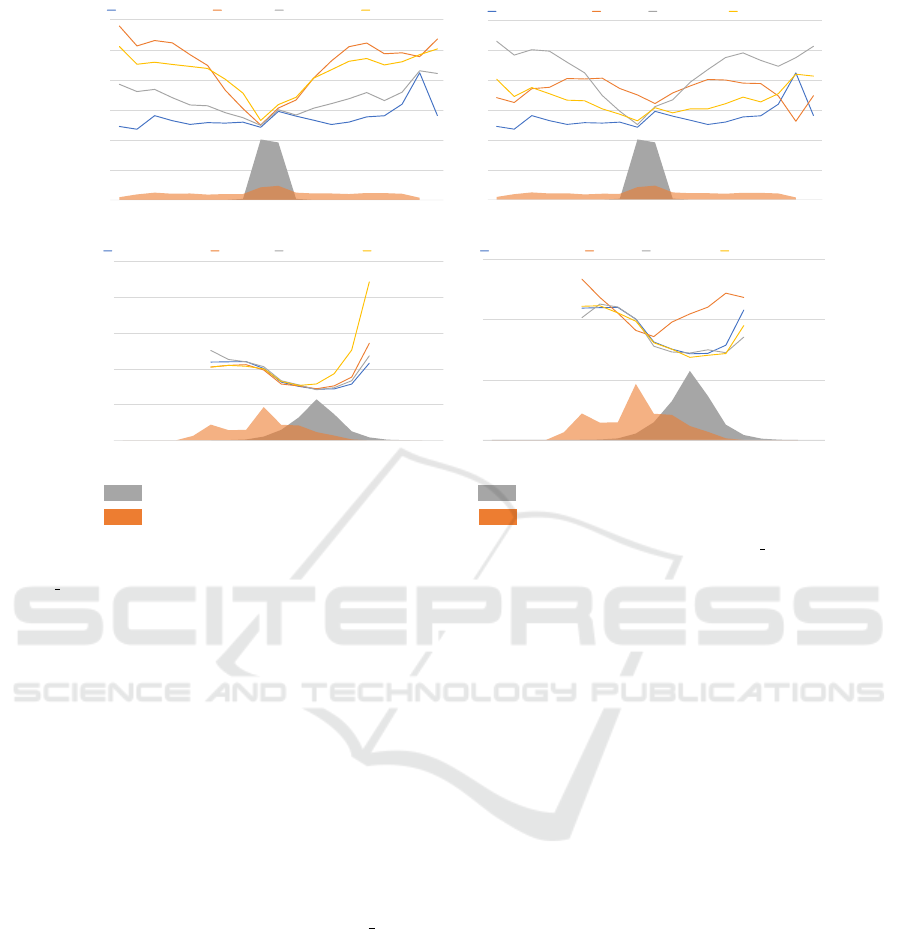
Figure 6: The correlation between the rotation angle of the camera pose and absolute relative error (abs rel) was evaluated
on our test dataset. The horizontal axis shows the ground truth camera rotation angle (roll/pitch), and the vertical axis shows
the abs rel value. Camera pose distribution in the training set is shown in gray, and the distribution in the test set is shown in
orange.
camera pose information and suffering from a predic-
tion on the feature-less part of the scene, e.g., floor
and walls. Nevertheless, our method outperformed
all baselines in NYUv2. Since the scenes in NYUv2
contained rich geometric features rather than Scan-
Net, our depth prediction network realized reasonable
prediction.
For tilted scenes, we summarized the quantitative
results of our proposed method evaluated on our test
dataset in Table 2. Our proposed method shows excel-
lent performances compared to our baselines on both
roll- and pitch-rotated scenes with unseen large cam-
era rotation, e.g., the percentage drop in abs rel for
ResnetUnet (by 29%), ResnetUnet+AUG (by 15%),
ResnetUnet+IMU (by 33%). Our method also sig-
nificantly outperformed other state-of-the-art meth-
ods (Saito et al., 2020; Zhao et al., 2021) on roll-
rotated scenes, though these methods heavily relied
on ground truth camera poses from IMU or offline
camera pose estimation like SLAM. In pitch-rotated
scenes, our proposed method achieved on-par perfor-
mance with Zhao et al.(CPP, CPP+PDA) (Zhao et al.,
2021). There are two main explanations for this fact:
First, the distribution gap between the pitch rotation
of the training set and the test set was less dissoci-
ated than for roll-rotated scenes. Second, Zhao et
al. (Zhao et al., 2021) employed ground truth cam-
era poses for their prediction while we only leveraged
image frames with RGB information.
We also summarized the relationship between
camera rotation angle and the error rate on roll- and
pitch- rotated scenes from our dataset in Figure 6. As
can be seen in the left column of Figure 6, the errors
around where the training set distribution is densely
populated do not show any difference between our
method vs. the baselines. However, in larger rota-
tion angles, even though the errors of the baselines
increased, the error of our proposed method does not
depend on rotation angles, which shows the effective-
ness of our proposed method.
5.3 Network Efficiency
We finally compared our proposed method (Resne-
tUnet+GR) with other baselines in terms of the num-
ber of parameters, actual memory consumption, num-
ber of floating operations (FLOPS), and inference
time as summarized in Table 3. Although our pro-
posed method performed 1.3x larger memory con-
sumption with the vanilla model (ResnetUnet), due
to the additional network parameter of gravity recti-
fier, we achieved 66.8 FPS for our prediction, which
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
460
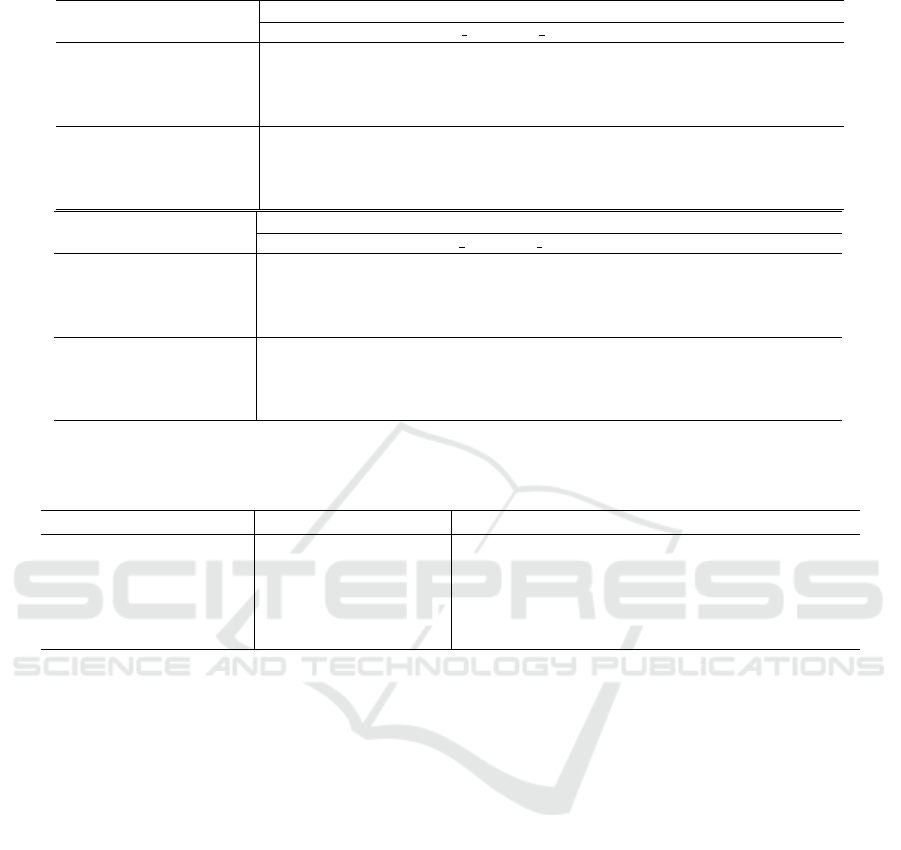
Table 2: The quantitative results of our method with all baselines on our test dataset on roll- and pitch-rotated scenes.
Method
Roll-rotated scenes
rgb imu SLAM abs rel ↓ sq rel ↓ rmse ↓ δ
1
↑ δ
2
↑ δ
3
↑
ResnetUnet X 0.317 0.976 2.266 0.476 0.584 0.661
ResnetUnet+AUG X 0.216 0.476 1.563 0.551 0.731 0.871
ResnetUnet+IMU X 0.299 0.881 2.219 0.481 0.582 0.673
ResnetUnet+GR (Ours) X 0.166 0.286 1.101 0.698 0.885 0.955
Saito et al. X X 0.262 0.622 1.663 0.568 0.567 0.567
Zhao et al. (CPP) X X 0.299 0.877 2.136 0.472 0.602 0.688
Zhao et al. (CPP
pred
) X 0.290 0.856 2.098 0.507 0.617 0.696
Zhao et al. (CPP + PDA) X X 0.219 0.424 1.495 0.551 0.748 0.883
Method
Pitch-rotated scenes
rgb imu SLAM abs rel ↓ sq rel ↓ rmse ↓ δ
1
↑ δ
2
↑ δ
3
↑
ResnetUnet X 0.217 0.364 1.265 0.568 0.770 0.905
ResnetUnet+AUG X 0.230 0.398 1.308 0.561 0.743 0.872
ResnetUnet+IMU X 0.267 0.430 1.360 0.502 0.719 0.885
ResnetUnet+GR (Ours) X 0.213 0.334 1.195 0.571 0.783 0.934
Saito et al. X X 0.320 0.616 1.580 0.431 0.432 0.433
Zhao et al. (CPP) X X 0.202 0.346 1.222 0.594 0.780 0.903
Zhao et al. (CPP
pred
) X 0.232 0.379 1.271 0.551 0.722 0.899
Zhao et al. (CPP + PDA) X X 0.200 0.330 1.165 0.582 0.770 0.907
Table 3: Network efficiency of our proposed method with all baselines in terms of the number of parameters, memory
consumption, FLOPS, and inference time (FPS with batch size 1). We employed our test dataset including both roll- and
pitch- rotated scenes.
Network Backbone Params Memory (MB) FLOPS(GB) FPS
ResnetUnet+GR (Ours) Resnet-50+Resnet-18 47.5M 190.1 39.5 66.8
ResnetUnet Resnet-50 36.3M 145.1 36.7 94.9
Saito et al. Resnet-50 36.3M 145.1 36.7 53.5
Zhao et al. (CPP) Resnet-50 36.3M 145.2 36.8 73.9
Zhao et al. (CPP
pred
) Resnet-50+Resnet-18 47.5M 190.1 39.6 63.3
is highly sufficient for real-time applications like real
robot navigation systems. Since we did not em-
ploy offline pose prediction systems like SLAM in
the back-end, we successfully realized our speed-up
(1.25x faster than Saito et al. (Saito et al., 2020)).
5.4 Application to SLAM
To complement our results, we demonstrated the ef-
fectiveness of our proposed depth prediction within
the SLAM applications. We integrated our depth pre-
diction into a CNN-MonoFusion (Wang et al., 2018),
which reconstructed dense 3D maps by integrating
monocular depth estimation with CNN into conven-
tional camera-tracking systems like ORB-SLAM2
(Mur-Artal and Tard
´
os, 2017).
Figure 7 shows the reconstruction result of our
proposed method and other baseline methods tested
on our dataset with roll- and pitch- rotated scenes.
As it can be seen, our proposed model (Resne-
tUnet+GR) successfully yielded more accurate recon-
struction of the scene, compared to the vanilla model
which failed to reconstruct reasonable scene geome-
try (e.g., there is some misalignment in parts of the
floor in Roll/seq4). The improved accuracy of depth
prediction with our gravity rectifier is not only obvi-
ous in Figure 4, but also in real-time applications like
SLAM. We figured out our proposed method provide
a more robust system for AR and robotics applica-
tions where users manipulate the device freely and
can cause significant camera orientation.
6 CONCLUSION
In this paper, we proposed a gravity rectifier, a novel
rectification approach to improve the accuracy of
monocular depth estimation for tilted images, lever-
aging only RGB information. Our gravity rectifier
is learned to transform a tilted image into a gravity-
aligned image and can be trained jointly with the
depth estimation network in an end-to-end fashion.
To show the effectiveness of our method, we evalu-
ated our method both qualitatively and quantitatively
using our own dataset with large roll and pitch cam-
era rotations. The results showed that our approach
significantly outperformed baselines, including data
augmentation, and has competitive accuracy as well
Monocular Depth Estimation for Tilted Images via Gravity Rectifier
461

Roll/seq1
Roll/seq4
Ground truth ResnetUnet ResnetUnet+GR(Ours)
Pitch/seq1
Figure 7: Dense reconstruction result of CNN-MonoFusion
(Wang et al., 2018) evaluated on our test dataset. From left
to right: result with ground truth depth, predicted depth
from ResnetUnet, predicted depth from ResnetUnet+GR
(Ours).
as state-of-the-art methods with external sensor or of-
fline pose estimation systems.
ACKNOWLEDGEMENT
This work was conducted on JEMARO (Japan-
Europe Master on Advanced Robotics), supported by
IUEP EU-Japan, MEXT and Erasmus+ programme.
REFERENCES
Agarwal, S., Furukawa, Y., Snavely, N., Simon, I., Curless,
B., Seitz, S. M., and Szeliski, R. (2009). Building
rome in a day. In IEEE International Conference on
Computer Vision, pages 72–79. IEEE.
Alhashim, I. and Wonka, P. (2018). High quality monoc-
ular depth estimation via transfer learning. In arXiv
preprint arXiv:1812.11941.
Chen, P.-Y., Liu, A. H., Liu, Y.-C., and Wang, Y.-
C. F. (2019). Towards scene understanding: Unsu-
pervised monocular depth estimation with semantic-
aware representation. In IEEE International Confer-
ence on Computer Vision and Pattern Recognition,
pages 2624–2632. IEEE.
Czarnowski, J., Laidlow, T., Clark, R., and Davison, A. J.
(2020). Deepfactors: Real-time probabilistic dense
monocular slam. IEEE Robotics and Automation Let-
ters, 5(2):721–728.
Dai, A., X. Chang, A., Savva, M., Halber, M.,
A. Funkhouser, T., and Nießner, M. (2017). Scannet:
Richly-annotated 3d reconstructions of indoor scenes.
In IEEE International Conference on Computer Vision
and Pattern Recognition, pages 5828–5839. IEEE.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In IEEE International Conference on
Computer Vision and Pattern Recognition, pages 248–
255. IEEE.
Dijk, T. V. and Croon, G. D. (2019). How do neural net-
works see depth in single images? In IEEE Interna-
tional Conference on Computer Vision, pages 2183–
2191. IEEE.
Do, T., Vuong, K., Roumeliotis, S. I., and Park, H. S.
(2020). Surface normal estimation of tilted images via
spatial rectifier. In European Conference on Computer
Vision, pages 265–280. Springer.
Eigen, D., Puhrsch, C., and Fergus, R. (2014). Depth map
prediction from a single image using a multi-scale
deep network. In Advances in Neural Information
Processing Systems, volume 27, pages 2366–2374.
Neural information processing systems foundation.
Fei, X., Wong, A., and Soatto, S. (2019). Geo-supervised
visual depth prediction. IEEE Robotics and Automa-
tion Letters, 4(2):1661–1668.
Fu, H., Gong, M., Wang, C., Batmanghelich, K., and
Tao, D. (2018). Deep ordinal regression network for
monocular depth estimation. In IEEE International
Conference on Computer Vision and Pattern Recogni-
tion, pages 2002–2011. IEEE.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. The Inter-
national Journal of Robotics Research, 32(11):1231–
1237.
Godard, C., Mac Aodha, O., Firman, M., and Brostow,
G. J. (2019). Digging into self-supervised monocular
depth estimation. In IEEE International Conference
on Computer Vision, pages 3828–3838. IEEE.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In IEEE Inter-
national Conference on Computer Vision and Pattern
Recognition, pages 770–778. IEEE.
Jaderberg, M., Simonyan, K., Zisserman, A., et al. (2015).
Spatial transformer networks. In Advances in Neu-
ral Information Processing Systems, volume 28, pages
2017–2025. Neural information processing systems
foundation.
Jiang, H., Larsson, G., Shakhnarovich, M. M. G., and
Learned-Miller, E. (2018). Self-supervised relative
depth learning for urban scene understanding. In Eu-
ropean Conference on Computer Vision, pages 19–35.
IEEE.
Kingma, D. P. and Ba, J. (2015). Adam: A method
for stochastic optimization. In IEEE International
Conference on Learning Representations, pages 1–15.
IEEE.
Laidlow, T., Czarnowski, J., and Leutenegger, S. (2019).
Deepfusion: Real-time dense 3d reconstruction for
monocular slam using single-view depth and gradi-
ent predictions. In IEEE International Conference on
Robotics and Automation, pages 4068–4074. IEEE.
Laina, I., Rupprecht, C., Belagiannis, V., Tombari, F., and
Navab, N. (2016). Deeper depth prediction with
fully convolutional residual networks. In IEEE In-
ternational Conference on 3D Vision, pages 239–248.
IEEE.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
462

Lee, J.-K. and Yoon, K.-J. (2015). Real-time joint estima-
tion of camera orientation and vanishing points. In
IEEE International Conference on Computer Vision
and Pattern Recognition, pages 1866–1874. IEEE.
Luo, X., Huang, J.-B., Szeliski, R., Matzen, K., and Kopf,
J. (2020). Consistent video depth estimation. ACM
Transactions on Graphics, 39(4):156–167.
Marcu, A., Costea, D., Licaret, V., P
ˆ
ırvu, M., Slusanschi,
E., and Leordeanu, M. (2018). Safeuav: Learning to
estimate depth and safe landing areas for uavs from
synthetic data. In European Conference on Computer
Vision Workshops, pages 43–58. IEEE.
Mi, L., Wang, H., Tian, Y., He, H., and Shavit, N. N. (2022).
Training-free uncertainty estimation for dense regres-
sion: Sensitivity as a surrogate. In AAAI Conference
on Artificial Intelligence. AAAI Press.
Mirzaei, F. M. and Roumeliotis, S. I. (2011). Optimal esti-
mation of vanishing points in a manhattan world. In
IEEE International Conference on Computer Vision,
pages 2454–2461. IEEE.
Mur-Artal, R. and Tard
´
os, J. D. (2017). Orb-slam2:
An open-source slam system for monocular, stereo,
and rgb-d cameras. IEEE Transactions on Robotics,
33(5):1255–1262.
Olmschenk, G., Tang, H., and Zhu, Z. (2017). Pitch and roll
camera orientation from a single 2d image using con-
volutional neural networks. In IEEE Canadian Con-
ference on Computer and Robot Vision, pages 261–
268. IEEE.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
net: Convolutional networks for biomedical image
segmentation. In Medical Image Computing and
Computer-Assisted Intervention, volume 9351, pages
234–241. Springer.
Saito, Y., Hachiuma, R., Yamaguchi, M., and Saito, H.
(2020). In-plane rotation-aware monocular depth
estimation using slam. In International Workshop
on Frontiers of Computer Vision, pages 305–317.
Springer.
Sartipi, K., Do, T., Ke, T., Vuong, K., and Roumeliotis, S. I.
(2020). Deep depth estimation from visual-inertial
slam. In IEEE International Conference on Intelligent
Robots and Systems, pages 10038–10045. IEEE.
Silberman, N., Hoiem, D., Kohli, P., and Fergus, R. (2012).
Indoor segmentation and support inference from rgbd
images. In European Conference on Computer Vision,
pages 746–760. Springer.
Sinz, F. H., Candela, J. Q., Bakır, G. H., Rasmussen, C. E.,
and Franz, M. O. (2004). Learning depth from stereo.
In Joint Pattern Recognition Symposium, pages 245–
252. Springer.
Sturm, J., Engelhard, N., Endres, F., Burgard, W., and Cre-
mers, D. (2012). A benchmark for the evaluation of
rgb-d slam systems. In IEEE International Conference
on Intelligent Robot Systems, pages 573–580. IEEE.
Suwajanakorn, S., Hernandez, C., and Seitz, S. M. (2015).
Depth from focus with your mobile phone. In IEEE
International Conference on Computer Vision and
Pattern Recognition, pages 3497–3506. IEEE.
Tateno, K., Tombari, F., Laina, I., and Navab, N. (2017).
Cnn-slam: Real-time dense monocular slam with
learned depth prediction. In IEEE International Con-
ference on Computer Vision and Pattern Recognition,
pages 6243–6252. IEEE.
Wang, J., Liu, H., Cong, L., Xiahou, Z., and Wang, L.
(2018). Cnn-monofusion: Online monocular dense
reconstruction using learned depth from single view.
In IEEE International Symposium on Mixed and Aug-
mented Reality Adjunct, pages 57–62. IEEE.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: from error visibil-
ity to structural similarity. IEEE Transaction on Image
Processing, 13(4):600–612.
Xian, W., Li, Z., Fisher, M., Eisenmann, J., Shechtman, E.,
and Snavely, N. (2019). Uprightnet: Geometry-aware
camera orientation estimation from single images. In
IEEE International Conference on Computer Vision,
pages 9974–9983. IEEE.
Yang, X., Chen, J., Dang, Y., Luo, H., Tang, Y., Liao, C.,
Chen, P., and Cheng, K.-T. (2019). Fast depth predic-
tion and obstacle avoidance on a monocular drone us-
ing probabilistic convolutional neural network. IEEE
Transactions on Intelligent Transportation Systems,
22(1):156–167.
Zhang, R., Tsai, P.-S., Cryer, J. E., and Shah, M. (1999).
Shape-from-shading: A survey. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
21(8):690–706.
Zhang, Z., Xiong, M., and Xiong, H. (2019). Monocu-
lar depth estimation for uav obstacle avoidance. In
IEEE International Conference on Cloud Computing
and Internet of Things, pages 43–47. IEEE.
Zhao, Y., Kong, S., and Fowlkes, C. (2021). Camera pose
matters: Improving depth prediction by mitigating
pose distribution bias. In IEEE International Con-
ference on Computer Vision and Pattern Recognition,
pages 15759–15768. IEEE.
Monocular Depth Estimation for Tilted Images via Gravity Rectifier
463
