
TSCH Slotframe Optimization Using Differential Evolution Algorithm
for Heterogeneous Sensor Networks
Aida Vatankhah, Ramiro Liscano and Tarana Ara
Dept. of Electrical, Computer, and Software Engineering, Ontario Tech University, Oshawa, Canada
Keywords:
Time-Slotted Channel Hoping, IEEE 802.15.4e, Slotframe Length, DE Optimization, Throughput, Network
Delay.
Abstract:
The Time-Slotted Channel Hopping (TSCH) from the IEEE 802.15.4 standard aims at providing high reli-
ability to industrial wireless networks. One of the most significant challenges in TSCH is determining the
schedule. In this paper, we present an algorithm to find an optimal TSCH schedule with the minimum slot-
frame size that can meet the desired throughput of each node. A customized Differential Evolution (DE)
optimization algorithm was developed based on the determination of an interference and collision free trans-
mission graph which has not been used in prior works. Our schedule can encompass sensors with different
packet rates and results in a low transmission delay of the data packets. Using Matlab, we performed various
complexity analysis to measure the time it takes to find the optimal schedule in different scenarios. Addition-
ally, we implemented the optimal TSCH schedule on TSCH-SIM simulator to confirm that the schedule is
working promising. As a result, the high value of the Packet Delivery Rate (PDR) obtained from the simula-
tions verified the schedule performance.
1 INTRODUCTION
TSCH is a synchronous MAC (Medium Access Con-
trol) protocol, specified in the IEEE 802.15.4 standard
amendment (Watteyne et al., 2016). To provide more
reliability to upper network layers, TSCH (IEEE Std
802.15.4-2011, 2011) (Howitt and Gutierrez, 2003)
combines Time Division Multiple Access (TDMA)
and Frequency Division Multiple Access mechanisms
(FDMA). Former allows several users to share the
same frequency channel by dividing the signal into
different time slots, while latter allows multiple users
to send data through a single channel by dividing the
channels’ bandwidth into separate non-overlapping
sub-channels and allocating each sub-channel to a
separate user. In other words, TDMA separates users
by time and FDMA separates users by frequency.
In TSCH, medium access is orchestrated by a
schedule that is distributed to all the nodes in the
network. The network coordinator is responsible for
management and control of traffic flows and also it
computes the optimized time slot and channel assign-
ment (Urke et al., 2021). (Teles Hermeto et al., 2017).
For each pair of nodes, a cell in the schedule is allo-
cated to specify when and in which channel the trans-
missions will take place. A cell is indicated by a tu-
ple as (timeslotOffset, channelOffset) and it can be
shared by multiple transmissions or dedicated to only
one transmission. The standard does not define how
TSCH packet transmission schedule is defined (Urke
et al., 2021).
Industrial sensor networks are expected to accom-
modate sensors with different packet rates, and this
makes it particularly challenging to determine an op-
timal transmission schedule for the network. For in-
stance, consider two sensors generating 4 and 100
packets/sec, respectively. Determining an optimal
slotframe length for the flows is important, since a
short slotframe length results in too many repetitions
of a slotframe prior to the data generation, whereas a
schedule with a long slotframe will suffer high end-
to-end delays. Consequently, the slotframe should
be long enough to include all the required transmis-
sions by considering the estimated number of gener-
ated packets.
In this paper, we propose a novel slotframe length
optimization for TSCH scheduling based on the Dif-
ferential Evolution (DE) algorithm to minimize the
overall network delay while maintaining the expected
packet transmissions in the network. Delay optimiza-
tion problem is identified as a combinatorial optimiza-
tion problem and is known to be NP-hard (Ojo and
Vatankhah, A., Liscano, R. and Ara, T.
TSCH Slotframe Optimization Using Differential Evolution Algorithm for Heterogeneous Sensor Networks.
DOI: 10.5220/0011623400003399
In Proceedings of the 12th Inter national Conference on Sensor Networks (SENSORNETS 2023), pages 57-66
ISBN: 978-989-758-635-4; ISSN: 2184-4380
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
57

Giordano, 2016) (Abu-Khzam et al., 2015). In this
paper we leveraged the DE optimization algorithm to
determine a sub-optimal schedule in terms of delay
for a centralized managed heterogeneous sensor net-
work. DE is a random search algorithm based on pop-
ulation evolution, proposed by Storn and Price (Storn
and Price, 1997). This method performs optimiza-
tion by iteratively trying to improve a candidate solu-
tion regarding a given measure of quality. It has been
proven that DE is a reliable optimization strategy for
many different tasks. In our problem the DE opti-
mizer has to generate a number of schedules that are
evaluated using an objective function to determine the
best schedule.
This paper is structured as follows. Section 2 is a
review of related works. Section 3 focuses on the pro-
posed slotframe optimization using the customized
DE optimization algorithm for TSCH and highlights
the details of each step. The optimized schedule for
a specific network topology is described in section 4
and the simulation results extracted from TSCH-SIM
simulator are presented in section 5. Then, a time
complexity analysis of the algorithm is performed in
section 6. Finally, section 7 concludes this paper.
2 RELATED WORK
A conflict-free scheduling algorithm was proposed in
(Soua et al., 2016), which targets the minimization of
transmission delay by reducing the slotframe length.
The author introduced the concept of ”WAVES”;
which is a period where each node performs at least
one packet transmission during the WAVE time. As a
result, the slotframe length will be equal to the time
when all the packets of each node are sent. In this
paper, the nodes closer to the sink suffer high traf-
fic overflows or queue overflow, and some nodes will
suffer high delays in large networks. The packet rate
of nodes is assumed to be homogeneous, although the
total number of packets received from child nodes is
different from others.
A debt-based scheduler is presented in (Minet
et al., 2018). In this approach, a debt value is cal-
culated for each TSCH device which has a message
to transmit, that is equal to the multiplication of the
remaining number of data messages the node has to
transmit and the depth of device in the network. No
spatial reuse was applied on cells in this paper, that
is, a cell is granted to only one transmitter which re-
sults in including lower number of transmissions in a
single time slot and higher delays accordingly. Simi-
larly, Ines Khoufi et al. (Khoufi et al., 2017) proposed
a multi slotframe to determine the lower bound num-
ber of slots required to perform data gathering and to
support sensor flows with data delivery constraints.
These two approaches (Khoufi et al., 2017) (Minet
et al., 2018) only allocate one cell per node to han-
dle all traffic. Therefore, the performance of the algo-
rithm degrades under high traffic loads.
A centralized Adaptive Multi-hop Scheduling
(AMUS) algorithm has been proposed in (Jin et al.,
2016) to provide optimized schedules using tentative
cell allocations. AMUS reserves additional cells for
those links which might be heavily loaded, or prone
to interference to improve communication reliability
and achieve low latency. A Combinatorial Multi-
Armed Bandit (CMAB) was proposed in (Javan et al.,
2019) which determines the optimal scheduling by
assignment of TSCH cells to links using the Linear
Learning Rewards (LLR) algorithm. This is done
using a bipartite graph that matches non-interfering
links to slot-frame matrix cells. We also use a graph
to represent non-interfering links but optimize this us-
ing a DE algorithm.
The Traffic Aware Scheduling Algorithm (TASA)
(Palattella et al., 2012) aims at finding the minimal
number of slots needed to send all data to a root node.
To reach this goal, matching and coloring functions
are used to plan the distribution of slots and channels
across the entire network without any collision. First,
links that still have data to transmit are selected at the
corresponding time slot through a matching process.
Then, the channel offsets of the links are allocated so
that interference does not occur through the matching
process.
The effect of different slotframe length on energy
consumption is investigated in (Kharb and Singhrova,
2018), however, the goal of this paper is to find the
minimum slotframe length that results in minimum
energy consumption. Hill Climbing technique as a lo-
cal search based mathematical optimization was used
to discover the optimized slotframe length and the
penalty function is used to provide a hill to climb
when the optimization starts at undesirable location.
The simulation results show that slotframe length and
energy consumption have inverse correlation relation-
ship.
Fafoutis et al. (Fafoutis et al., 2018) proposed
an adaptive static scheduling that allows each pair of
nodes to control their active time slots in a distributed
manner in order to improve the energy efficiency of a
TSCH network. A static scheduler was built at com-
pilation time with excessive time slots over alloca-
tion yet, the nodes can dynamically activate or deac-
tivate their a priori allocated time slots, according to
the traffic requirements. However, the authors did not
consider the cost of blind over-provisioning in terms
SENSORNETS 2023 - 12th International Conference on Sensor Networks
58
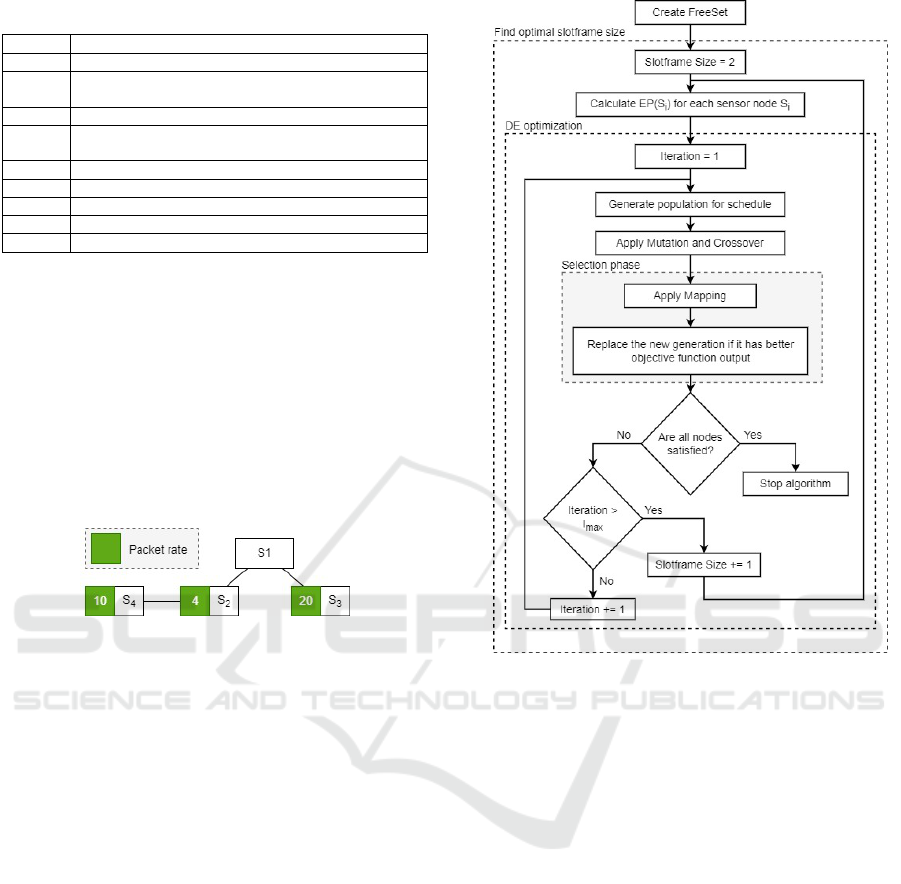
Table 1: List of notations used in this paper.
Symbol Description
S
i
Sensor with ID i
V
Set of vectors includes all the collision and interference
free transmissions as a pair of transmit-receive tuple
m Size of space vector V
M
Matrix that keeps track of the interference and collision
between transmissions
M
i, j
Transmission status of i and j’th pairs in V
L
s f
Slotframe length
N
ts
Number of timeslots in the slotframe
PR(S
i
) Packet rate of sensor S
i
EP(S
i
) Expected generated packets for sensor node S
i
of delay performance.
3 METHODOLOGY
To explain the algorithm, we use a simple tree topol-
ogy as shown in Figure 1, consisting of a root
node labeled as S
1
and three other sensor nodes as
{S
2
, S
3
, S
4
}. In this figure the green boxes show the
number of packets each node generates in one second.
Figure 1: A simple tree topology consisting of 3 sensor and
a root node.
In our context, the TSCH schedule is built with
the concept of spatial reuse that allows each cell to be
shared by multiple transmissions. Multiple transmis-
sions allocation to a single cell will diminish delay
due to the capability of encompassing higher number
of transmissions in each time slot; however, it can also
lead more potential collisions and interference while
exchanging data. To address this concern, we have
defined a FreeSet graph that captures transmissions
among pairs of nodes that are collision and interfer-
ence free. The transmissions in one set of the FreeSet
can be assigned to a cell in TSCH schedule without
causing any collision or interference.
Then, the expected number of transmissions is es-
timated for each sensor node according to its packet
rate as well as its children’s packet rate since each
node is also responsible to relay the received packets
from its children. Using a customized DE optimiza-
tion algorithm, we found the minimum slotframe size
that includes all the required estimated transmissions.
Figure 2 is a flowchart describing the overall opti-
mization procedure. In the following sections, each
step of the algorithm is explained in more detail. The
list of symbols and notations used in this paper is pre-
sented in table 1.
Figure 2: Flowchart for customized DE slotframe size opti-
mization.
3.1 Creating the FreeSet Graph
Before applying the customized DE optimization,
FreeSet is created, which consists of several set of
node pairs that can be assigned to a single cell without
causing any collision or interference. Assuming that
A includes a set of transmissions as {A
1
, ..., A
i
}, A
i
consists of the transmission / receive pair as S
j
→ S
k
,
where j and k correspond to the node index values. In
this case:
• A new transmission can be assigned to the same
cell which is appointed to A only if it does not
have any collision or interference with any of the
transmissions in set A.
• The new transmission can be assigned to the same
time slot which A has been assigned to, providing
that it does not cause any collision with any of
transmissions in A.
The union of collision and interference graph for
the sample topology is depicted in Figure 3a. In this
graph, the transmissions connected through an edge
cannot be assigned to an identical cell as it will cause
TSCH Slotframe Optimization Using Differential Evolution Algorithm for Heterogeneous Sensor Networks
59
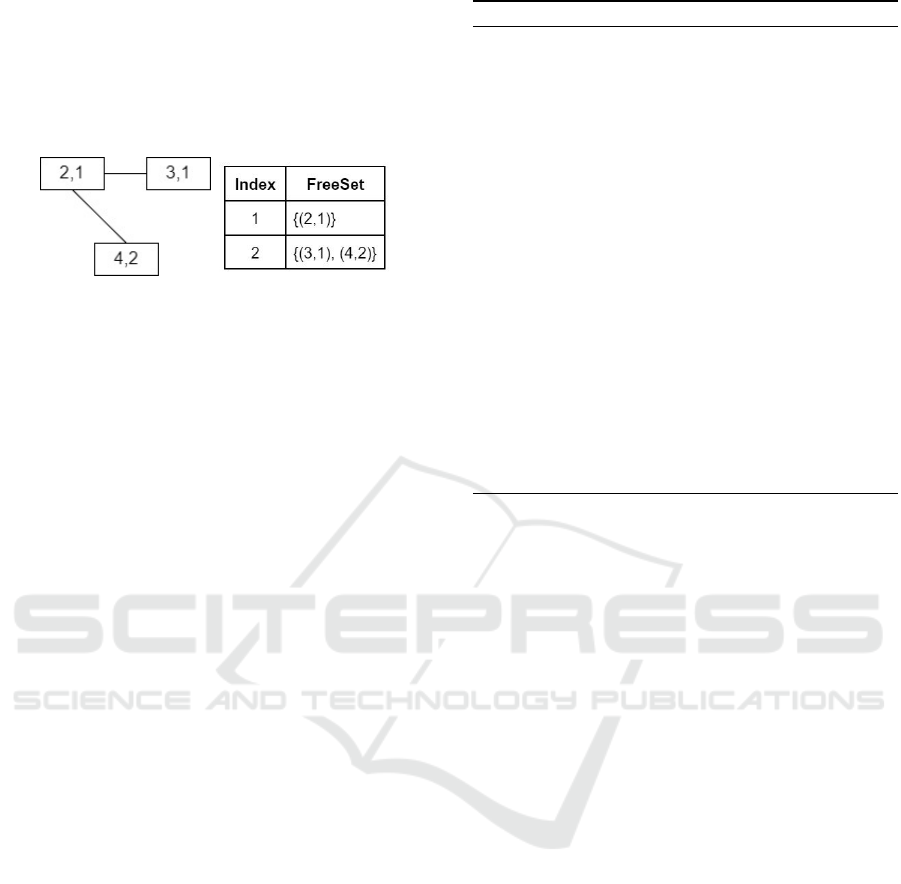
collision or interference. For instance, transmissions
S
2
→ S
1
and S
4
→ S
2
are not allowed to be assigned
to a single cell or time slot, since node S
2
cannot send
and receive at the same time. As shown in Figure 3b,
FreeSet is obtained from the complement of the graph
3a.
(a) . (b) .
Figure 3: Union of the collision and interference graph (a)
FreeSet (b).
As shown in Algorithm 1, we implemented the
FreeSet graph as a vector space V that includes all
the collision and interference free transmissions as a
pair of transmit-receive tuple. Based on the example
in Figure 1, this set would include the 3 transmissions
as V = { S
4
→ S
2
, S
2
→ S
1
, S
3
→ S
1
}.
We use a matrix as M to keep track of the interfer-
ence and collision between transmissions, where M
i, j
represent the status of transmission pairs i and j in V .
The values in the matrix can be 0, 1, or 2. A value
of 0 implies that transmission i and j can be assigned
to the same cell; a value of 1 implies that there will
be interference if these two pairs transmit packets si-
multaneously but they can transmit their packets in
different channels to avoid interference; a value of 2
implies that if the pair i and j transmit a packet at the
same time collision will occur. Based on these values,
collision and interference can be distinguished.
Below is an algorithm that creates the FreeSet
from the vector V . The complexity of this algorithm
is O(m · log(m − 1)) where m denotes the size of set
V .
3.2 Estimate the Expected Number of
Packets Generated
A TSCH slotframe consists of several time slots and
slotframe length can be calculated by multiplying the
number of time slots in a slotframe by the time slot
length. The slotframe should be large enough to trans-
mit all the estimated number of packets within the
slotframe time period. Nodes are synchronized and
follow a schedule using a slotframe that continuously
repeats over time.
For any particular slotframe, we estimate the num-
ber of packets that are to be transmitted in the network
by computing the number of packets generated in that
specific slotframe size and propagating this through-
Algorithm 1: Creating FreeSet.
Input V = {V
1
,V
2
, ...,V
m
}
Output FreeSet
1: M
c∗c
∈ ℜ
2
: c = 1...m, m = |V |
2: for i = 1 : m do
3: Pair
1
← V
i
4: for j = i + 1 : m do
5: Pair
2
← V
j
6: Check the conditions for Collision and Inter-
ference for Pair
1
and Pair
2
7: if (Pair
1
, Pair
2
) in collision then
8: M
i, j
← 2
9: else if (Pair
1
, Pair
2
) in interference then
10: M
i, j
← 1
11: else
12: M
i, j
← 0
13: end if
14: end for
15: end for
16: FreeSet ← Pairs in M with value 1
17: return FreeSet
out the network topology. As example the simple
3 node topology shown in Figure /reffig:4-nodes is
considered. The generated packet rate of these three
nodes {S
2
, S
3
, S
4
} is {4, 20, 10} packets/sec, respec-
tively. For the scheduler, we assume that all the data
packets have been generated simultaneously after the
network initialization phase. The highest delay that
can exist is the case where a node generates a data
packet and has to wait for the next slotframe to trans-
mit. To avoid high delays, we estimate the number of
cells each node needs according to its packet rate and
their children’s packet rate.
Considering a slotframe length as L
s f
consisting
of N
ts
time slots, one can estimate the generated pack-
ets during the slotframe for each node S
i
as EP(S
i
) us-
ing Equation 1. The result obtained from L
s f
· PR(S
i
)
may be a fraction, although we need an integer value
as the output for the expected number of generated
packets. The most conservative approach to deal with
fractions is to round up, which results in over schedul-
ing of transmissions. Any other approach can orig-
inate the possibility missing a required transmission
which cause an eventual queue overflow. After the
number of packets generated during a particular slot-
frame size is calculated, the number of packets gener-
ated by the children are summed up as can be seen in
Equation 1.
EP(S
i
) = ⌈L
s f
· PR(S
i
)⌉ +
M
∑
j=1
EP(S
i
.child( j )) (1)
where PR(S
i
) denotes the packet rate of sensor node
SENSORNETS 2023 - 12th International Conference on Sensor Networks
60
S
i
and S
i
.child( j ) represents the j
th
child of node S
i
.
Slotframe length L
s f
is calculated through the follow-
ing equation:
L
s f
= L
ts
· N
ts
(2)
where L
ts
is time slot length that is assumed as stan-
dard value of 10 ms and N
ts
denotes the number of
time slots in a slotframe.
3.3 Customization of the DE
Optimization Algorithm
Using different channel offsets in TSCH schedule
provides the opportunity for the interfering transmis-
sions to be concurrently done without interference.
Consequently, although we cannot schedule transmis-
sions that collide with each other in the same time
slot, we can schedule interfering transmissions in
same time slot but on different channel offsets.
In initialization step of the DE optimization algo-
rithm, the minimum population size is used to reduce
the complexity of the computations. Minimally, 4
random solutions are generated in the search space
of the DE optimization problem. Search space in
our problem is set of transmissions in FreeSet; each
can be of a different size which is not possible con-
dition in Differential Evolution optimization process
and was explained in details in (Vatankhah and Lis-
cano, 2022).
In the Mapping phase, each value in the gener-
ated matrix is mapped to a transmission set in the
FreeSet which is described thoroughly in (Vatankhah
and Liscano, 2022). A node is labeled as SATISFIED
or NOT SATISFIED which declares whether the suffi-
cient number of cells have been assigned to the sensor
node S
i
based on the calculated EP(S
i
) value or not.
Moreover, while generating a schedule in the
Mapping phase, we utilized a prioritization for choos-
ing between two transmissions that collide in same
time slot but different channels. While checking each
time slot for possible collisions, we may discover
transmissions causing a collision such as (S
i
, S
r
) and
(S
k
, S
r
) due to the identical destination node. Trans-
mission (S
k
, S
r
) will be chosen over the other trans-
mission only if one of the circumstances listed below
is met:
• S
i
is labeled as SATISFIED
• EP(S
k
) >= EP(S
i
)
Providing that either conditions are met, (S
i
, S
r
)
will be removed from the schedule. Afterwards, the
schedule passes through the Mutation and Crossover
phases of the DE algorithm. The details of Muta-
tion and Crossover have been thoroughly explained
in (Vatankhah and Liscano, 2022).
In the Selection phase, the generated schedule is
compared to the existing one that was generated in
initialization phase as shown in Equation 3. In this
stage, the schedule with the higher objective function
value will survive and will be replaced with the corre-
sponding schedule. The objective is to maximize the
Equation 3.
f (x) = Num(
N
∑
i=1
S
i
|S
i
.lbl == SAT ISFIED) (3)
where S
i
.lbl is equal to SATISFIED only if the
number of cells that are assigned to sensor S
i
is more
or equal to the EP(S
i
). This function calculates the
number of nodes that are labeled as SATISFIED. The
algorithm will continue running on a specific slot-
frame length until all the sensor nodes labeled as SAT-
ISFIED or the iteration exceeds an iteration maximum
value which has been set to 20 in the examples pre-
sented in this paper. If this maximum value is reached
the optimization process will resume using a new slot-
frame size which is larger than the original one by one
slot.
As depicted in Figure 2, block titled ”DE opti-
mization” shows when all the nodes are SATISFIED,
the optimization is terminated, otherwise, slotframe
size will increase by one and DE optimization will try
to find a schedule that can satisfy all the nodes.
4 AN OPTIMIZED SCHEDULE
SCENARIO
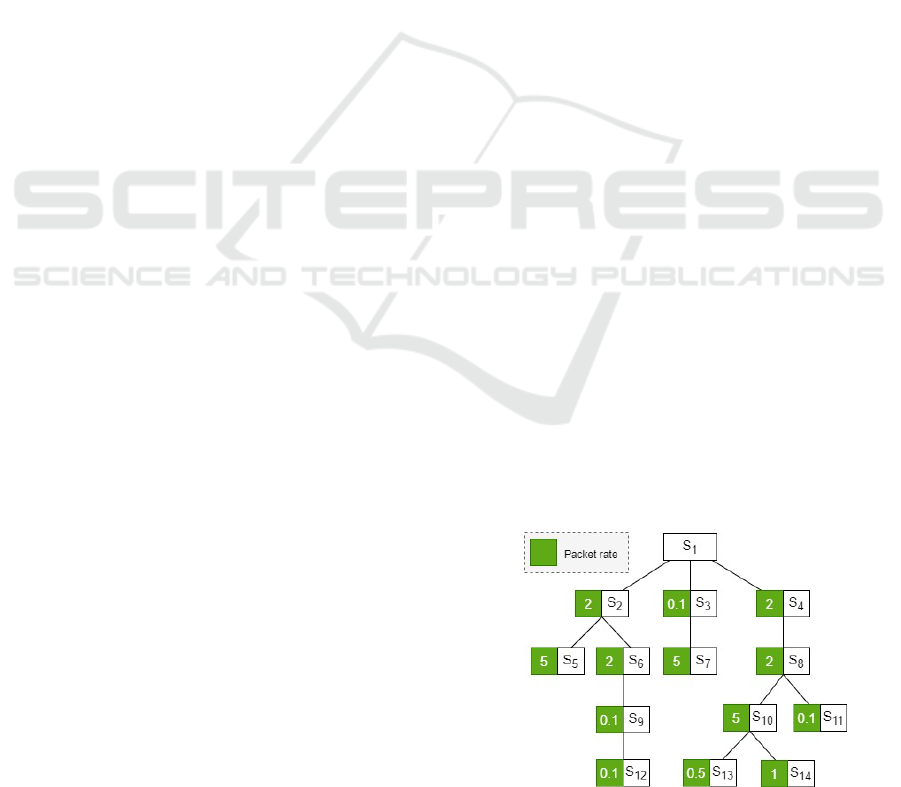
To evaluate the performance of the algorithm on het-
erogeneous traffic flows, a tree topology consisting of
14 nodes with the given packet rates was examined as
shown in Figure 4, where the green boxes denote the
packet rate of each node.
Figure 4: A sample tree topology of 14 sensor nodes.
TSCH Slotframe Optimization Using Differential Evolution Algorithm for Heterogeneous Sensor Networks
61
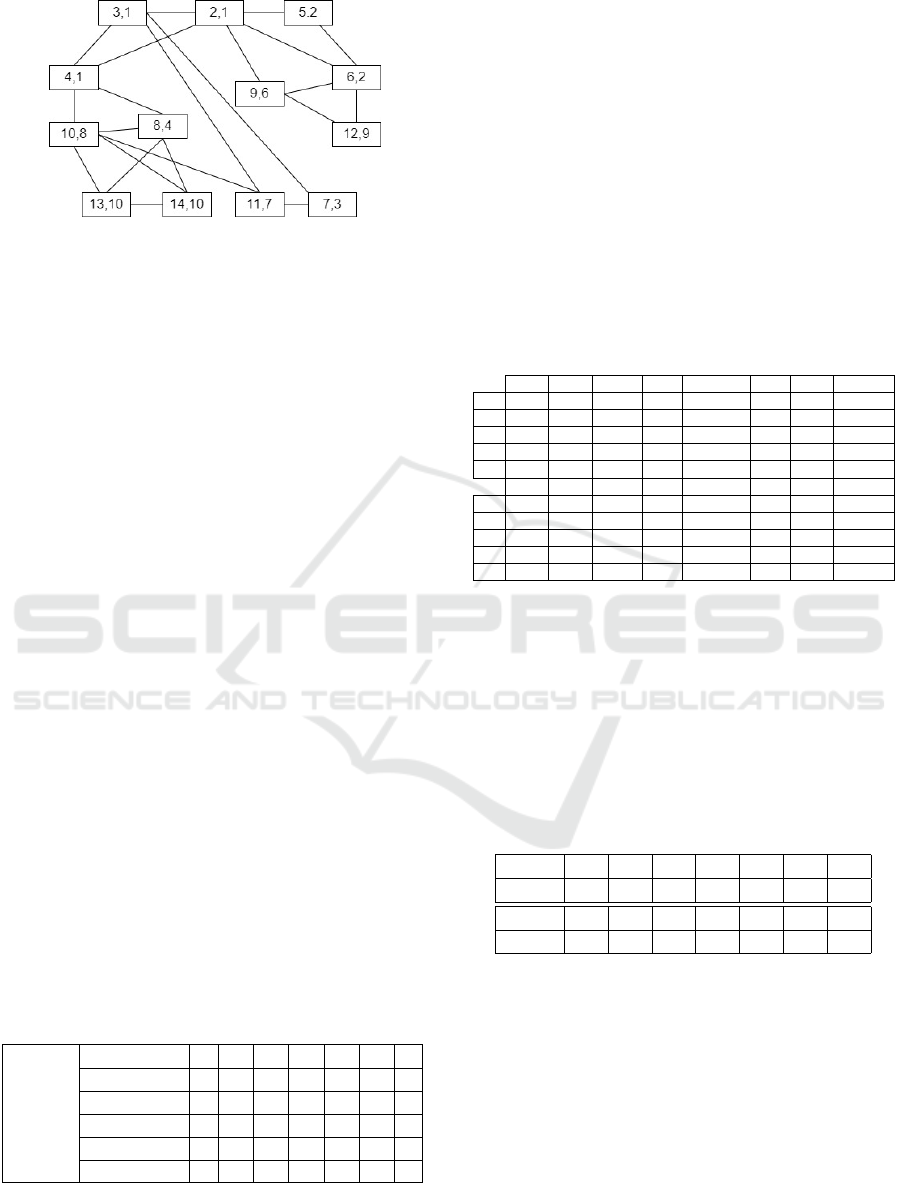
Figure 5: Union of collision and interference graph for the
network depicted in Figure 4.
According to the given topology, the possible
transmissions are {(S
2
, S
1
), (S
3
, S
1
), (S
4
, S
1
), (S
5
, S
2
),
(S
6
, S
2
), (S
7
, S
3
), (S
8
, S
4
), (S
9
, S
6
), (S
10
, S
8
), (S
11
, S
8
),
(S
12
, S
9
), (S
13
, S
10
), (S
14
, S
10
)} which are shown as
graph vertices in Figure 5. Based on the collision and
interference rules explained in section 3.1, the colli-
sion and interference graph was established as Figure
5.
For each slotframe size, the proposed algorithm
calculates the number of expected packets for each
node. Then, the Customized DE algorithm explores
to find a solution that can accommodate all the ex-
pected number of transmissions. The expected num-
ber of generated packets for each node is calculated
using Equation 1.
In this example, any fractional values are rounded
up to the nearest integer. In this table, the number
of generated packets and the number of the assigned
cells for sensor nodes {S
2
, S
3
, ..., S
14
} are shown in
the EP and ASSIGNED rows, respectively. From Ta-
ble 2, it can be observed that the number of assigned
cells in the optimized schedule is more or equal to the
expected packet transmission values for each sensor
node. The higher number of assigned transmissions
for some nodes in the schedule is due to the fact that
some of the NOT SATISFIED transmissions are co-
located with SATISFIED transmissions in the same
set of FreeSet. When the schedule tries to add the
NOT SATISFIED transmission to the schedule, it also
adds the already SATISFIED transmission.
Table 2: Expected number of packet generation for slot-
frame of size 15.
L
s f
= 15
ID S
2
S
3
S
4
S
5
S
6
S
7
S
8
EP
5 2 6 1 3 1 5
ASSIGNED 6 3 6 4 5 12 6
ID S
9
S
10
S
11
S
12
S
13
S
14
EP
2 3 1 1 1 1
ASSIGNED 3 3 4 10 8 1
For the given example in Figure 4, the algorithm
terminates at a slotframe size of 15, when all the
nodes are labeled as SATISFIED and Table 2 shows
the expected and assigned transmissions for each of
the slots. One can observe that the number of assigned
slots is higher or equal to the expected.
After these assignments the TSCH schedule in-
cludes all the required number of transmissions to
transmit the generated packets or relay the received
packets from their children as illustrated in Table 3.
In this table, multiple transmissions are scheduled to
send their packets in the specified time slot and chan-
nel offset. For instance, sensor nodes S
2
, S
7
and S
12
are scheduled to transmit or relay the packets to nodes
S
1
, S
3
and S
9
, respectively, in time slot 2 and channel
offset 3.
Table 3: Schedule for the optimal slotframe size of 15.
ts 1 ts 2 ts 3 ts 4 ts 5 ts 6 ts 7 ts 8
ch 1 11 6 11,13
ch 2 13 2,7,12
ch 3 8 3 9
ch 4 2 8 12 2,7,12
ch 5 2,7,12 8 7, 9, 13 12,13 2,7 6,3,8 8 10,2,7,12
ts 9 ts 10 ts 11 ts 12 ts 13 ts 14 ts 15
ch 1 4
ch 2 4,7,13 4,5
ch 3 6,3,8 4,5 4,5 11,7,12,13 11,13 4,13
ch 4 14 5,9 10 6
ch 5 12 10,7,12 7,12 6 7,12 7,12
As explained earlier, the customized DE optimiza-
tion initialized by setting slotframe length L
s f
to 3.
For the given topology, the number of SATISFIED
nodes is 6 out of 14 nodes as presented in Table 4.
The slotframe length increases by one in this case un-
til all the nodes are SATISFIED. As it can be observed
from Table 4, the schedule with slotframe length of 15
is found while all the 14 nodes are satisfied.
Table 4: Maximum number of SATISFIED nodes for each
slotframe length.
L
s f
3 4 5 6 7 8 9
#SAT 6 9 9 10 10 11 12
L
s f
10 11 12 13 14 15
#SAT 13 13 13 13 13 14
5 SIMULATION
To evaluate the performance of the schedule obtained
from our Customized DE optimization algorithm,
we implement the optimized schedule in the TSCH-
Sim (Elsts, 2020) network simulator for the scenario
shown in Figure 4. The overall throughput and aver-
age delay of the network are measured using TSCH-
SIM simulator.
By network throughput, we define this as the total
SENSORNETS 2023 - 12th International Conference on Sensor Networks
62
Table 5: Simulation parameters used for the TSCH DE op-
timized schedule.
Parameter Value
SIMULATION DURATION 2500 sec
APP WARMUP PERIOD SECOND 1000 sec
LINK MODEL Logistic Loss model
TRANSMIT RANGE M 40 meters
APP PACKET SIZE 100
MAC MAX RETRIES 7
MAC QUEUE SIZE 15
ROUTING ALGORITHM ManualRouting
SCHEDULING ALGORITHM ManualScheduler
SLOT FRAME LENGTH 15
TIME SLOT DURATION 10 ms
number of packets successfully received at the root
node in a given time and one would expect this to be
the sum of all the data packet generation rates. The
mathematical expression for throughout is specified
as below.
Overall throughput =
∑
N
i=1
received packets
i
total simulation time
(4)
where N denotes the total number of packets and
received packets
i
is the number of packets received
by sensor S
i
.
Network delay refers to the total time (propaga-
tion, transmission, queuing, and processing period) a
packet takes to travel from a source node to a des-
tination node and it is estimated in seconds. In this
simulator, the delay is evaluated by taking the differ-
ence between the time a packet is generated and is
successfully received by the root node. The average
delay has been calculated utilizing Equation 5.
Delay =
∑
N
i=1
(time(i)
received
−time(i)
generated
)
total packets
(5)
We manually configured the network with the
nodes’ positions, connections and routes shown in
Figure 4. These values match those used to deter-
mine the optimal schedule. We chose the Logistic
Loss model as the radio propagation model. For the
experiment, we considered five channel offsets and 15
time slots with each time slot duration of 10 millisec-
onds again matching the settings and results obtained
from the customized DE optimization in Matlab. The
details of the simulation parameters are listed in Table
5.
In table 5, APP WARMUP PERIOD SECOND is
the time period it takes for all the sensor nodes to join
the network (i.e when the network is stable). Data
packets are not generated before this warm-up period
has ended after the start of the simulation resulting
in more accurate metrics. The MAC re-transmissions
Table 6: Analysis of the proposed customized DE optimiza-
tion algorithm.
Evaluation Parameters Customized DE Algorithm
PDR 99.75%
Total Generated Packets 22349
Received Packets 22295
Average Delay (sec) 3.2
Maximum Delay 4
Minimum Delay 2.4
Throughput 14.1
were left as the default value of 7, however, the MAC
queue size was increased to 15 to eliminate pack-
ets being dropped from queue overflows. Simulation
time was set to 2500 seconds which 1000 seconds of
this time is the warm up period. Application packet
size was considered as 100 bytes and the standard
value for time slot was used as 10 ms. The optimal
slotframe size for the schedule was obtained as 15
time slots which implies 150 ms.
5.1 Simulation Results
We used the overall throughput, average end-to-end
delay, Packet Delivery Ratio (PDR) as metrics to con-
firm the efficiency of the proposed approach. Accord-
ing to the results given in Table 6, it can be stated that
99.75% of the packets have been delivered success-
fully, although a few of the scheduled packets were
lost. We noticed that some transmissions are sched-
uled before packet generation and due to queue over-
flow, the packet was lost.
As shown in table 6, the average end-to-end
packet delay from the source to the root node is about
3.2 seconds. Additionally, the maximum delay and
minimum delays are extracted as 4 and 2.4, respec-
tively.
The PDR value is very high and that implied the
fact that the schedule is reliable and due to consid-
ering possible collisions and inferences, majority of
packets are being delivered successfully. Although
other factors such as link loss can cause packet loss
while increasing the simulation time.
6 TIME COMPLEXITY
ANALYSIS
Time complexity is defined as the amount of time
taken by the algorithm to run and find an optimal solu-
tion. The optimal solution for the optimization in this
paper is the TSCH schedule with minimal slotframe
size that can encompass the required transmissions.
TSCH Slotframe Optimization Using Differential Evolution Algorithm for Heterogeneous Sensor Networks
63
Two main parameters were measured as complex-
ity evaluation parameters. The first one is the Time
required for the algorithm to find a schedule to satisfy
all the node’s throughput. The second evaluation pa-
rameter is L
s f
that denotes the slotframe length of the
discovered optimal schedule. It is important to know
how many time slots used in the schedule to satisfy all
the nodes. The parameters that were modified to anal-
yse the performance of the Customized DE optimizer
are N; the total number of nodes in the network and
I
max
; the maximum iteration of optimization process
for each slotframe size.
Two complexity cases were defined, Case 1 and
Case 2. The difference between complexity Case 1
and Case 2 is the packet rate of the nodes. The packet
rate of the nodes is defined to be a value between 0.1
and 1 packets/sec in Case 1 while packet rates higher
than 1 packets/sec is used for Case 2. For each case
there were different groups of scenarios created where
various typologies and packet rate were used, how-
ever, for each group of scenarios the average num-
ber of neighbors Avg
NBR
and the depth of the tree D
were kept identical. The objective of this analysis is
to observe the impact of the iteration in the optimiza-
tion process as well as the effectiveness of number of
nodes, packet rate and maximum iteration value on
the time complexity of the algorithm.
6.1 Complexity Case 1
In Complexity Case 1, the packet rate of the nodes
were specified as random values between 0.1 and 1.
We implemented four different scenarios as 1, 2, 3
and 4 for an in-depth performance analysis and the
specification of each scenario is presented in Table 7.
Table 7: Summary of eight scenarios for applications with
data rate of less than 1 packet per second.
N I
max
L
s f
Avg
NBR
D Time(s)
SCN 1-1 10 20 10 2 4 37.79
SCN 1-2 10 50 9 2 4 77.57
SCN 2-1 14 20 16 3 5 97.68
SCN 2-2 14 50 15 3 5 246.89
SCN 3-1 25 20 32 3 5 877.59
SCN 3-2 25 50 29 3 5 1013.57
SCN 4-1 50 20 52 4 10 1154.32
SCN 4-2 50 50 47 4 10 12940.62
The goal is to prove that the Customized DE op-
timization algorithm can find a solution for different
sizes of networks with heterogeneous data rates and
have an estimate of time complexity. The first two
scenarios, SCN 1-1 and SCN 1-2 represent a small
network consisting of 10 nodes. The difference be-
tween these two scenarios is the maximum number of
iterations (I
max
); which is considered as 20 and 50 in
SCN 1-1 and SCN 1-2, respectively. I
max
denotes the
maximum number of iteration in optimization process
for each slotframe length. Providing that I
max
is equal
to 20 and starting from the slotframe size of 3, the
algorithm iterates 20 times maximally and after an-
alyzing the population fitness value, if the populated
schedule does not meet the requirement of the objec-
tive function (which is satisfying all nodes), it will
increase the slotframe size by one and then after re-
setting the I
max
value, it continues the optimization
process. Otherwise, it will terminate the algorithm
with the optimal schedule as the solution. The aver-
age number of neighbors in SCN 1-1 and SCN 1-2
was 2 and the depth of the Tree structure was kept as
a static number of 4. The next three scenarios are Net-
works including 14, 25 and 50 nodes with the given
parameters as the average number of nodes (Avg
NBR
)
and the depth of the tree (D).
As it can be observed from the results shown in
Table 7, the algorithm is able to find a solution for 4
different sizes of network . The optimal solutions ob-
tained for SCN 1-1 and 1-2 were schedules with slot-
frame sizes of 10 and 9, respectively. While the maxi-
mum iteration I
max
is set to a larger value for SCN 1-2
it was able to find an optimized schedule with smaller
slotframe size. This is important as the time com-
plexity grows by increasing the maximum number of
iterations, I
max
, and the number of the nodes N.
As the number of nodes increases in the network,
the maximum iteration value has to be increased for
the optimizer to find a solution. It can be seen in ta-
ble 7 that although the simulation specifications such
as number of nodes, average number of neighbors and
depth of the tree are identical, the slotframe size of the
schedule found for I
max
=20 is typically higher than
for I
max
=50 since there are more iterations and hence
more populations generated to find an optimal sched-
ule. In SCN 1 and SCN 2, the difference between
slotframe size of I
max
=20 and I
max
=50 is only one slot-
frame; however, for the next two scenarios SCN 3 and
SCN 4, the gap between I
max
=20 and I
max
=50 is 3 and
4, respectively. It can be concluded that for higher
number of nodes, choosing a larger value for I
max
re-
sults in schedules with smaller slotframe size and con-
sequently less delay though the time to achieve this
increases exponentially.
We also observed that for packet rate of less than
1 the total number of required transmissions was con-
stant at 18. This makes the optimization simpler as
the objective value (number of transmissions) does
not change. However one will see, in the next sec-
tion, that this value will grow more by increasing the
slotframe length in networks with higher packet rates.
SENSORNETS 2023 - 12th International Conference on Sensor Networks
64
6.2 Complexity Case 2
In Complexity Case 2, we increased the packet rates
to random values larger than 1 packet/sec to analyse
the performance of the algorithm in high packet rates.
Four different scenarios as SCN 5, SCN 6, SCN 7 and
SCN 8 were considered and the specification of each
scenario is illustrated in Table 8. The number of nodes
in SCN 5 to SCN 8 was set to 10, 14, 25 and 50 nodes,
respectively. Each scenario was implemented in two
different values for I
max
as 20 and 50. For each sce-
nario, the values of time complexity and the slotframe
length of the optimal schedule were measured to dis-
cover the impact of the number of nodes and value of
I
max
on time complexity and slotframe length (L
s f
).
Table 8: Summary of eight scenarios for applications with
packet rate more than 1 packet per second.
N I
max
L
s f
Avg
NBR
D Time(s)
SCN 5-1 10 20 26 2 4 432.46
SCN 5-2 10 50 25 2 4 1120.72
SCN 6-1 14 20 40 3 5 1736.83
SCN 6-2 14 50 37 3 5 4254.37
SCN 7-1 25 20 57 3 5 3407.36
SCN 7-2 25 50 51 3 5 9127.91
SCN 8-1 50 20 86 4 10 12201.45
SCN 8-2 50 50 75 4 10 24055.78
Although according to Table 8, it will take more
time to find a solution compared to the scenarios in
Case 1, the proposed customized DE optimizer was
able to discover a schedule for heterogeneous network
having higher packet rates that were greater than 1
packet per second.
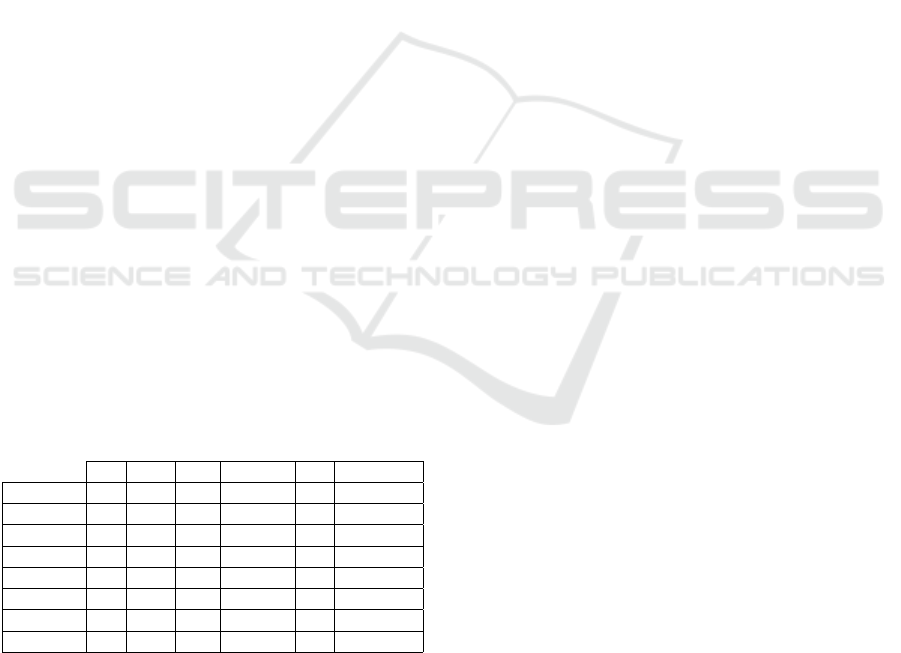
As mentioned in the previous section, when the
network has to satisfy higher data rates the expected
number of transmissions climbs considerably due to
the slotframe length increment and the high packet
rate of nodes. Figure 6 shows an example of this in-
crease in the expected number of transmissions for
the case of a topology consisting of 10 sensor nodes
and a range of slotframes between 3 to 10. The ex-
pected number of transmissions climbs considerably
due to the slotframe length (which basically increases
the time of the slotframe) and the high packet rate of
the nodes. At higher slotframe lengths, the nodes gen-
erate more packets, as a consequence, the associated
number of required transmissions grows accordingly
and the assigned number of slots is not sufficient any-
more.
The figure also shows the number of satisfied
nodes in each slotframe length as the optimization
progresses. The optimization will continue until the
number of transmissions is satisfied by all the nodes
in the network, which in this example topology is 10.
We illustrated a portion of the optimization process
only as the solution a slotframe size of 25 or 26 de-
pending on the maximum number of iterations.
Figure 6: Total number of required transmissions in slot-
frame length between 3 and 15 for packet rate higher than 1
packet/sec and the number of satisfied nodes.
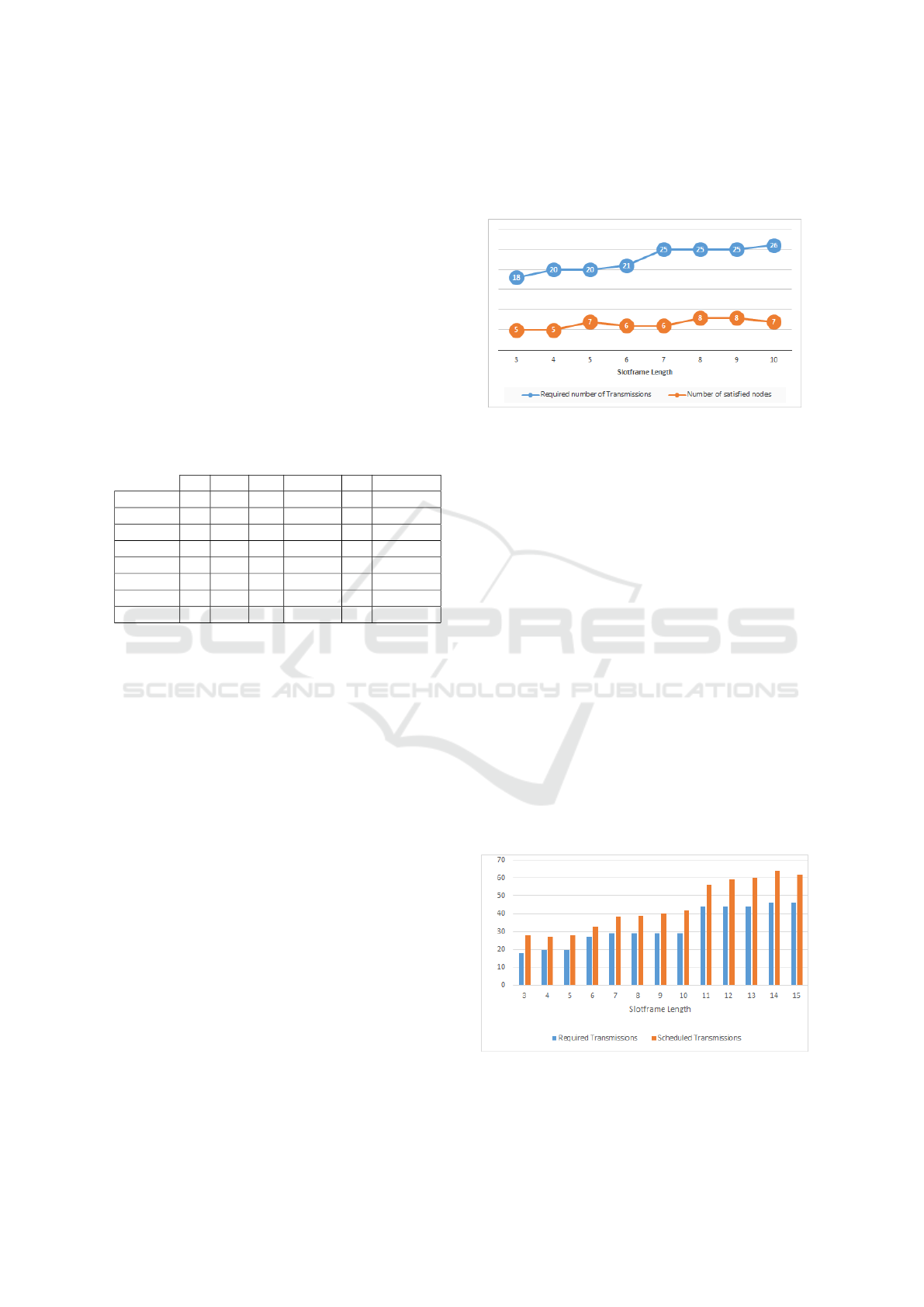
6.3 Analysis of over Scheduling
The schedule that is created by the optimization al-
gorithm is a conservative schedule with more slots
scheduled than required due to the round up of the
number of required transmissions. The advantage of
over scheduling is that the schedule is less suscepti-
ble to data losses because there are extra time slots
scheduled to accommodate for the re-transmission of
the data. The drawback of over scheduling can be
higher energy consumption as the time slot will con-
sume more energy if scheduled to transit or receive
than if it is in an idle mode.
We calculated the average of the total number of
required transmissions of each node for a network
topology of 10 nodes for different slotframe sizes
ranging from 3 to 15 and compared this to the number
that was scheduled. The results are depicted in Figure
7. The average percentage of overscheduling is 11.6
% for this scenario.
Figure 7: Total number of required transmissions vs. as-
signed number of transmissions for slotframe length be-
tween 3 and 15 for a network consisting of 10 nodes.
TSCH Slotframe Optimization Using Differential Evolution Algorithm for Heterogeneous Sensor Networks
65

7 CONCLUSION
In this paper we proposed a novel slotframe length
optimization approach using a customized DE opti-
mization algorithm that considers possible packet col-
lisions and interference. It also supports different
packet generation rates. The presented method finds a
schedule with minimum slotframe length which will
minimize the average delay in the network. The
performance analysis using the TSCH-Sim simulator
confirm that the DE optimized schedule is working
without any collision and interference. We conducted
several experiments using different scenarios to anal-
yse the performance of the algorithm.
As future work, we are planning to include an
adaptive component to the scheduler that can react
to changes in the routes of the network as the cur-
rent static schedule is not ideal as it assumes a static
route. It is also worth investigating how much fur-
ther can the schedule be optimized since the current
approach results in an over-scheduled solution which
can result in scheduled cells that are not being utilized
although it helps to transmit all the packets generated
successfully in case there is a packet loss due to the
unexpected conditions.
REFERENCES
Abu-Khzam, F. N., Bazgan, C., Haddad, J. E., and Sikora,
F. (2015). On the complexity of QoS-aware service
selection problem. In Service-Oriented Computing,
Lecture notes in computer science, pages 345–352.
Springer Berlin Heidelberg, Berlin, Heidelberg.
Elsts, A. (2020). TSCH-Sim: Scaling up simulations of
TSCH and 6TiSCH networks. Sensors, 20(19):5663.
Fafoutis, X., Elsts, A., Oikonomou, G., Piechocki, R., and
Craddock, I. (2018). Adaptive static scheduling in
IEEE 802.15. 4 TSCH networks. In 2018 IEEE 4th
World Forum on Internet of Things (WF-IoT), pages
263–268. IEEE.
Howitt, I. and Gutierrez, J. (2003). IEEE 802.15.4 low rate -
wireless personal area network coexistence issues. In
2003 IEEE Wireless Communications and Network-
ing, 2003. WCNC 2003., volume 3, pages 1481–1486
vol.3.
IEEE Std 802.15.4-2011 (2011). IEEE Standard for
Local and metropolitan area networks–Part 15.4:
Low-Rate Wireless Personal Area Networks (LR-
WPANs). IEEE Std 802.15.4-2011 (Revision of IEEE
Std 802.15.4-2006), pages 1–314.
Javan, N. T., Sabaei, M., and Hakami, V. (2019). IEEE
802.15. 4. E TSCH-based scheduling for throughput
optimization: A combinatorial multi-armed bandit ap-
proach. IEEE Sensors Journal, 20(1):525–537.
Jin, Y., Kulkarni, P., Wilcox, J., and Sooriyabandara, M.
(2016). A centralized scheduling algorithm for IEEE
802.15. 4e TSCH based industrial low power wireless
networks. In 2016 IEEE Wireless Communications
and Networking Conference, pages 1–6. IEEE.
Kharb, S. and Singhrova, A. (2018). Slot-frame length
optimization using hill climbing for energy effi-
cient TSCH network. Procedia Computer Science,
132:541–550.
Khoufi, I., Minet, P., and Rmili, B. (2017). Schedul-
ing transmissions with latency constraints in an IEEE
802.15. 4e TSCH network. In 2017 IEEE 86th Vehic-
ular Technology Conference (VTC-Fall), pages 1–7.
IEEE.
Minet, P., Soua, Z., and Khoufi, I. (2018). An adaptive
schedule for TSCH networks in the Industry 4.0. In
2018 IFIP/IEEE International Conference on Perfor-
mance Evaluation and Modeling in Wired and Wire-
less Networks (PEMWN), pages 1–6. IEEE.
Ojo, M. and Giordano, S. (2016). An efficient centralized
scheduling algorithm in IEEE 802.15.4e TSCH net-
works. In 2016 IEEE Conference on Standards for
Communications and Networking (CSCN). IEEE.
Palattella, M. R., Accettura, N., Dohler, M., Grieco,
L. A., and Boggia, G. (2012). Traffic aware schedul-
ing algorithm for reliable low-power multi-hop ieee
802.15. 4e networks. In 2012 IEEE 23rd International
Symposium on Personal, Indoor and Mobile Radio
Communications-(PIMRC), pages 327–332. IEEE.
Soua, R., Minet, P., and Livolant, E. (2016). Wave: a dis-
tributed scheduling algorithm for convergecast in ieee
802.15. 4e tsch networks. Transactions on Emerging
Telecommunications Technologies, 27(4):557–575.
Storn, R. and Price, K. P. (1997). Differential evolution a
simple and efficient adaptive scheme for global opti-
mization over continu. Journal of Global Optimiza-
tion.
Teles Hermeto, R., Gallais, A., and Theoleyre, F. (2017).
Scheduling for IEEE802.15.4-TSCH and slow chan-
nel hopping MAC in low power industrial wireless
networks: A survey. Computer Communications,
114:84–105.
Urke, A. R., Kure, Ø., and Øvsthus, K. (2021). A survey of
802.15.4 TSCH schedulers for a standardized indus-
trial internet of things. Sensors, 22(1):15.
Vatankhah, A. and Liscano, R. (2022). Differential evolu-
tion optimization of TSCH scheduling for heteroge-
neous sensor networks. In 2022 IEEE Wireless Com-
munications and Networking Conference (WCNC),
pages 1491–1496.
Watteyne, T., Handziski, V., Vilajosana, X., Duquennoy, S.,
Hahm, O., Baccelli, E., and Wolisz, A. (2016). In-
dustrial Wireless IP-Based Cyber –Physical Systems.
Proceedings of the IEEE, 104(5):1025–1038.
SENSORNETS 2023 - 12th International Conference on Sensor Networks
66
